ТРАНСПОРТИРОВОЧНАЯ ТЕЛЕЖКА АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ МЕХАНИЧЕСКОЙ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники
Изобретение относится к автоматизированным системам механической парковки, в частности, к транспортировочной тележке такой системы парковки.
Уровень техники
В автоматизированных системах механической парковки пользователь оставляет транспортное средство в помещении приема/выдачи, откуда они автоматически перемещаются на место парковки на определенный срок хранения посредством транспортировочных устройств.
Известно, что указанные системы парковки должны иметь транспортировочное устройство, обычно состоящее из одной или двух транспортировочных тележек, на которые погружают транспортное средство для хранения или извлечения с места парковки. Транспортировочная тележка обычно располагается на вертикально и/или горизонтально перемещаемой платформе, посредством которой она может быть перемещена в требуемое положение на том же уровне или на различных уровнях парковки.
Из указанного положения тележка может перемещать транспортное средство с платформы, на которой она сама находится, в другое положение, на другую перемещаемую платформу в помещение для выдачи транспортных средств или к месту парковки, а также она может перемещать транспортное средство при его доставке из другого места на различных перемещаемых платформах в помещения приема или в места парковки для размещения его на платформе, на которой она сама находится. Циклическое движение всегда осуществляется назад и вперед в том смысле, что тележка движется от своей платформы до другого положения, чтобы погрузить или выгрузить транспортное средство для последующего возврата на платформу с транспортным средством или без него.
Некоторые автоматизированные системы механической парковки описаны в патентных документах US 4968208, KR 100696296, ЕР 1373666, KR 100622553.
Обычно в известных тележках центрирование, захват и подъем колес транспортного средства не выполняют посредством одного устройства, что приводит к их сложности и дороговизне изготовления.
В документе DE 19842084 описана транспортировочная тележка, содержащая раму, средство управления этой тележкой и несколько устройств для захвата, подъема и центрирования колес транспортного средства, при этом соответствующие перемещения осуществляются в разное время и посредством нескольких устройств. В частности, захват и подъем колес транспортного средства осуществляются посредством поперечного перемещения салазок 26 и вращения зажимов 28 и 29, центрирование колес происходит посредством последующего совмещения центральной опоры 30 с продольной осью транспортировочной тележки. Это приводит к увеличению времени центрирования транспортного средства и требует нескольких различных исполнительных механизмов.
Кроме того, известна транспортировочная тележка по DE 19842084, приспособленная для перемещения в траншее 18, выполненной между опорными клиньями 11 для колес транспортного средства. Устройства захвата и подъема колес транспортного средства расположены над рамой 21 тележки 20 для исключения их столкновения с этой рамой 21 во время поперечного перемещения. В результате такая транспортировочная тележка является сложной и имеет большие габариты, не позволяющие этой тележке пройти под транспортным средством при отсутствии упомянутой траншеи. Таким образом, использование такой транспортировочной тележки требует проведения определенных строительных работ.
Кроме того, тележки в известных механических системах парковки не позволяют проводить центрирование, захват и подъем колес транспортного средства за одно перемещение, осуществляемое непрерывно посредством одного устройства.
Тележки в известных механических системах парковки не позволяют в достаточной мере уменьшить объем, который необходим для хранения транспортных средств в автоматизированных системах механической парковки.
Раскрытие изобретения
Согласно изобретению транспортировочная тележка автоматизированной системы механической парковки транспортных средств, содержит по меньшей мере одну раму; средство управления указанной тележки; и по меньшей мере одно устройство центрирования, подъема и удержания колеса транспортного средства, включающее в себя по меньшей мере одну пару захватных элементов, поддерживаемую по меньшей мере одной подвижной опорой, которая выполнена с возможностью поперечного перемещения для позиционирования указанных захватных элементов (17) одной пары рядом с колесом (32) одной оси транспортного средства. При этом устройство центрирования, подъема и удержания колеса транспортного средства выполнено с возможностью центрирования, подъема и удержания двух колес одной оси транспортного средства посредством одного поперечного перемещения подвижных опор и объединенных с ними пар захватных элементов в направлении внешней стороны тележки.
Благодаря автоматическому центрированию минимизируется ширина, необходимая для эвакуации транспортного средства, а благодаря малой толщине тележки согласно изобретению минимизируется высота, требующаяся для эвакуации транспортного средства. Тележка согласно изобретению может заезжать под транспортное средство без его подъема над плоскостью перемещения самой тележки. Другое преимущество состоит в простоте тележки, ее легкости и экономичности, поскольку центрирование, захват и подъем колес выполняется посредством одного устройства.
Понятия «продольное направлении» или «продольно» подразумевают направление, по существу совпадающее с направлением перемещения ведущих колес тележки.
Понятия «поперечное направление» или «поперек» подразумевают направление, перпендикулярное продольной оси тележки.
Понятие «наклоненные навстречу друг другу» относится к двум наклонным плоскостям и означает две плоскости, имеющие одинаковый по абсолютной величине, но с противоположным знаком наклон относительно расположенной между ними оси.
Понятие «сложное перемещение» подразумевает перемещение нескольких частей транспортировочной тележки, что является задачей изобретения, выполняемой при по существу непрерывной временной последовательности. В частности, это относится к поперечному перемещению подвижных опор и повороту объединенных с ними пар захватных элементов, которые выполняются при одном поперечном перемещении устройства центрирования, подъема и удержания колеса.
Изобретение может включать в себя по меньшей мере одну из указанных предпочтительных особенностей.
Предпочтительно, рама содержит по меньшей мере две подвижные опоры, противоположные друг другу относительно продольной оси этой тележки, при этом указанные подвижные опоры выполнены с возможностью перемещения относительно указанной продольной оси между сомкнутым исходным положением и разомкнутым рабочим положением, которое расположено дальше снаружи в поперечном направлении по сравнению с указанным сомкнутым положением.
Предпочтительно является изменяемым в зависимости от внутреннего поперечного расстояния между шинами колес одной оси перемещаемого транспортного средства, причем при указанном разомкнутом положении, когда транспортное средство отцентрировано, указанная продольная ось тележки совпадает с продольной осью перемещаемого транспортного средства.
Предпочтительно захватные элементы каждой пары противоположны друг другу относительно поперечного направления тележки и выполнены с возможностью поворота вокруг оси вращения между исходным положением и сомкнутым положением, в котором они по существу обращены друг к другу.
Предпочтительно каждый захватный элемент содержит по меньшей мере одну подъемную лапу, имеющую по меньшей мере одну наклонную плоскость и выполненную с возможностью поворота между разомкнутым положением и сомкнутым положением, по существу перпендикулярным продольной оси указанной тележки; и по меньшей мере один выступ, функционально связанный с по меньшей мере одной подъемной лапой и имеющий такую форму, что, когда он прижат к шине колеса транспортного средства, то вынуждает подъемную лапу перемещаться из разомкнутого положения в сомкнутое.
Каждая подъемная лапа может содержать множество роликов, расположенных вдоль наклонной плоскости, при этом, когда указанные подъемные лапы находятся в сомкнутом положении, наклонные плоскости двух захватных элементов одной пары наклонены навстречу друг другу.
Предпочтительно тележка может содержать узел перемещения подвижной опоры, который включает в себя по меньшей мере один червячный винт; по меньшей мере один мотор-редуктор, функционально связанный с червячным винтом для приведения его во вращение; и по меньшей мере один толкатель.
Предпочтительно каждый толкатель включает в себя ползун с по меньшей мере одной гайкой, взаимодействующей с червячным винтом, и по меньшей мере одну удлиненную втулку с пересекающей ее перекладиной, на концах которой шарнирно установлены два толкающих стержня.
Предпочтительно каждый толкающий стержень другим своим концом шарнирно связан с захватным элементом, так что, когда захватные элементы каждой пары находятся в исходном положении, ось каждого толкающего стержня проходит через ось вращения соответствующего захватного элемента.
Предпочтительно тележка содержит два червячных винта, приводимых во вращение посредством указанного мотор-редуктора, при этом один червячный винт имеет правую резьбу, а другой - левую резьбу, так что их противоположное вращение обеспечивает перемещение указанных двух толкателей наружу или внутрь тележки.
Рама может содержать по меньшей мере одну поперечную балку, внутри которой с возможностью скольжения установлен подвижный опорный элемент.
Предпочтительно каждый подвижный опорный элемент имеет два плеча, расположенных снаружи поперечной балки, при этом каждое плечо выполнено с возможностью скольжения внутри указанной поперечной балки рамы
Другим объектом изобретения является транспортировочная тележка автоматизированной системы механической парковки транспортного средства, содержащая две указанные расположенные друг за другом в продольном направлении описанные выше транспортировочные тележки.
Предпочтительно устройство центрирования, подъема и удержания колеса находится в горизонтальной плоскости, в основном совпадающей с плоскостью рамы тележки.
Объектом изобретения является также способ перемещения транспортного средства при автоматической механической парковке, включающий в себя этап, на котором с помощью электронных средств подают команду на перемещение пары транспортировочных тележек автоматизированной системы механической парковки транспортных средств вдоль продольной оси и останавливают эту пару тележек, когда устройства центрирования, подъема и удержания колеса транспортного средства, являющиеся частью этой транспортировочной тележки, придут в соответствие с парой противоположно расположенных колес одной оси транспортного средства; и последующий этап, на котором с помощью электронных средств подают команду на перемещение подвижных опор транспортировочной тележки в поперечном относительно указанной продольной оси направлении, при этом подвижные опоры несут указанное устройство центрирования, так что при воздействии колесом на указанное устройство центрирования возникающие при этом силы реакции автоматически приводят в действие установленные на подвижной опоре захватные элементы, осуществляя одновременный захват и подъем колеса, удерживая указанную пару транспортировочных тележек выровненной относительно продольной оси.
Предпочтительно этап электронного управления перемещением подвижных опор включает в себя этап одновременного перемещения двух противоположных устройств центрирования.
Кроме того, указанный способ может включать в себя этап подачи датчиком положения сигнала на остановку в блок обработки данных, управляющий перемещением указанной пары тележек, автоматически вызывая тем самым подачу команды на перемещение подвижных опор.
Предпочтительно, подвижные опоры симметрично толкают противоположные устройства центрирования.
Другие особенности и преимущества изобретения станут понятны из дальнейшего описания вариантов его осуществления со ссылками на чертежи.
Краткое описание чертежей
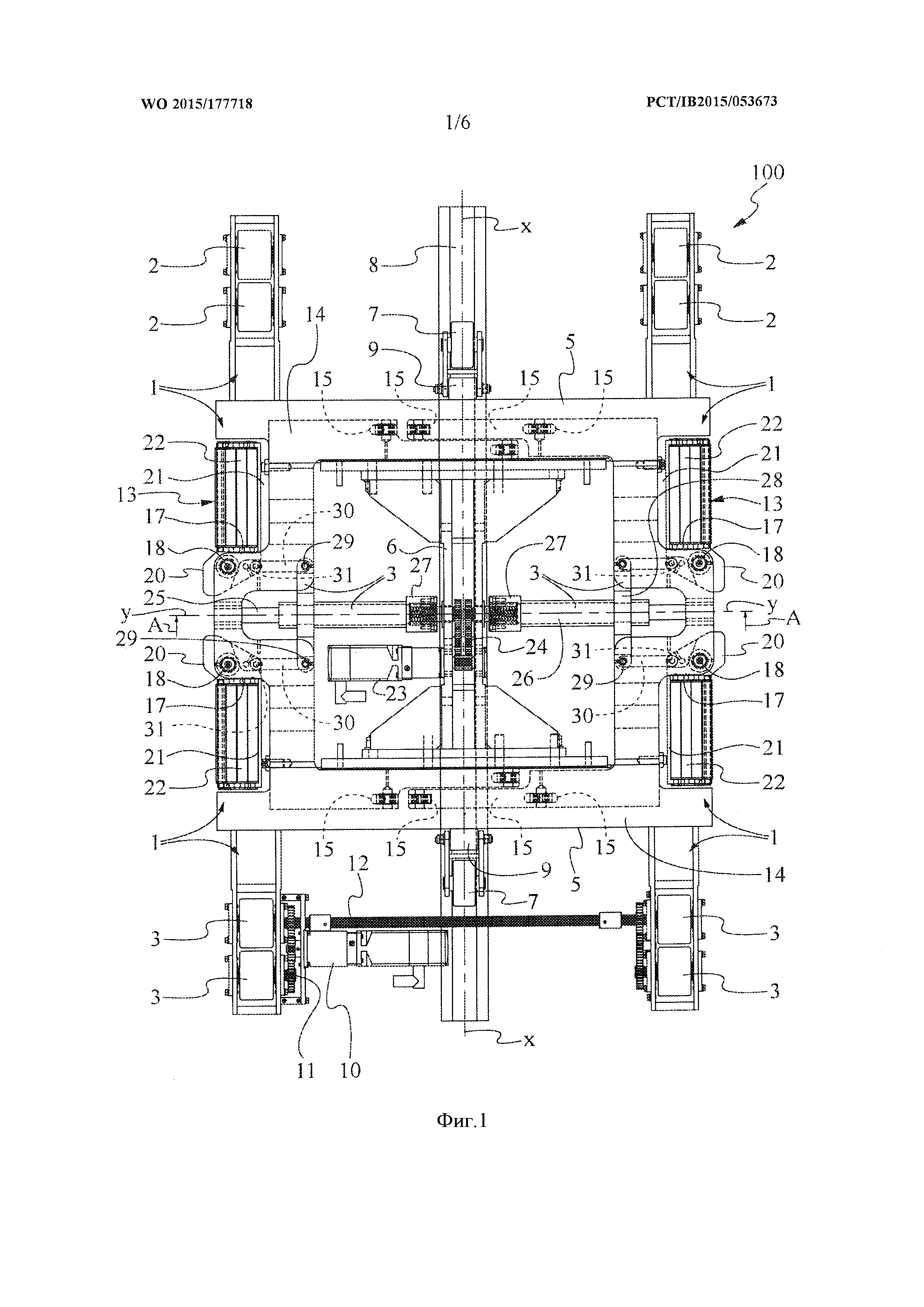
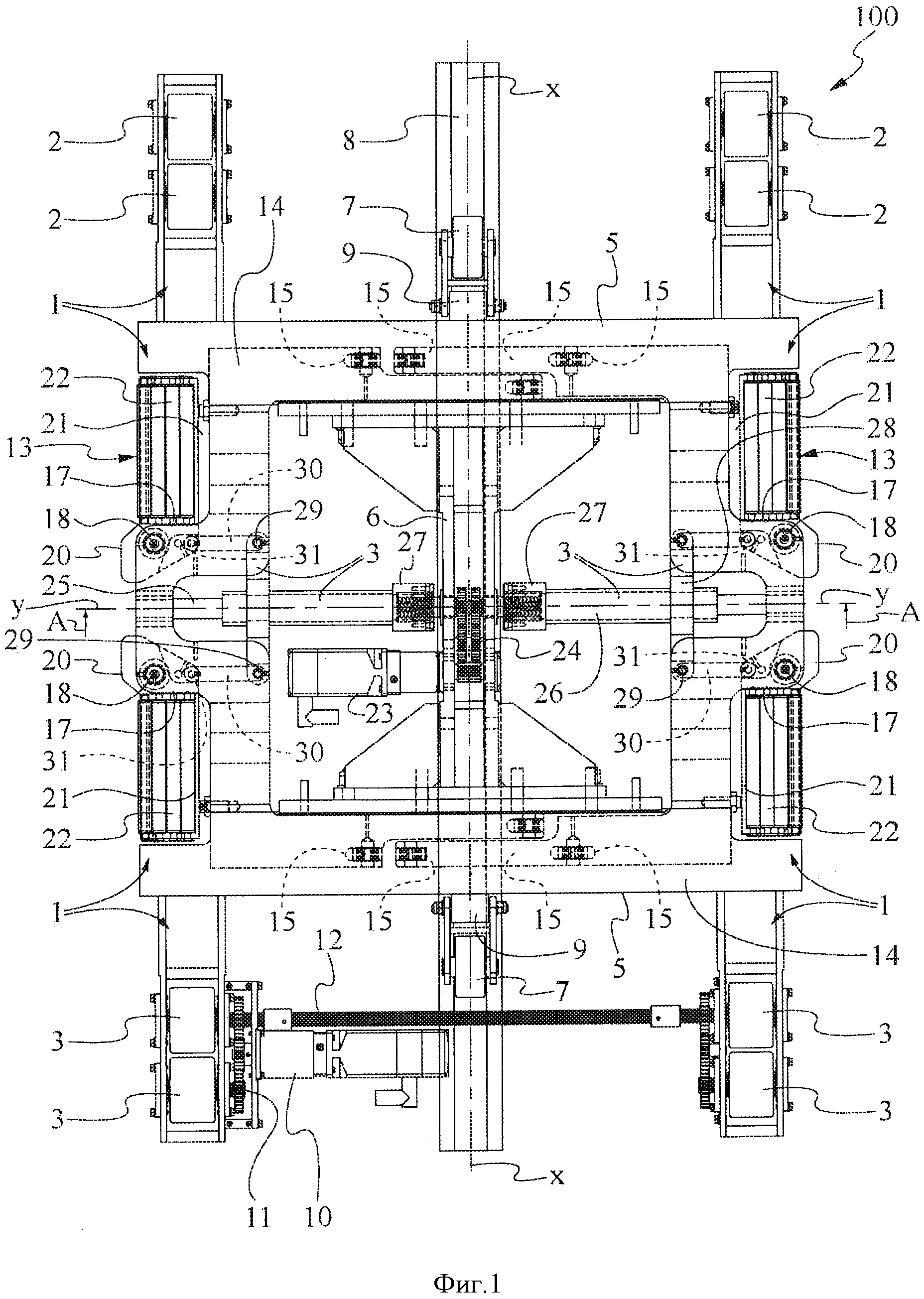
На фиг. 1 схематично показана транспортировочная тележка для автоматизированной системы механической парковки в первом положении с втянутыми подвижными опорами и захватными элементами в разомкнутом положении, вид сверху;
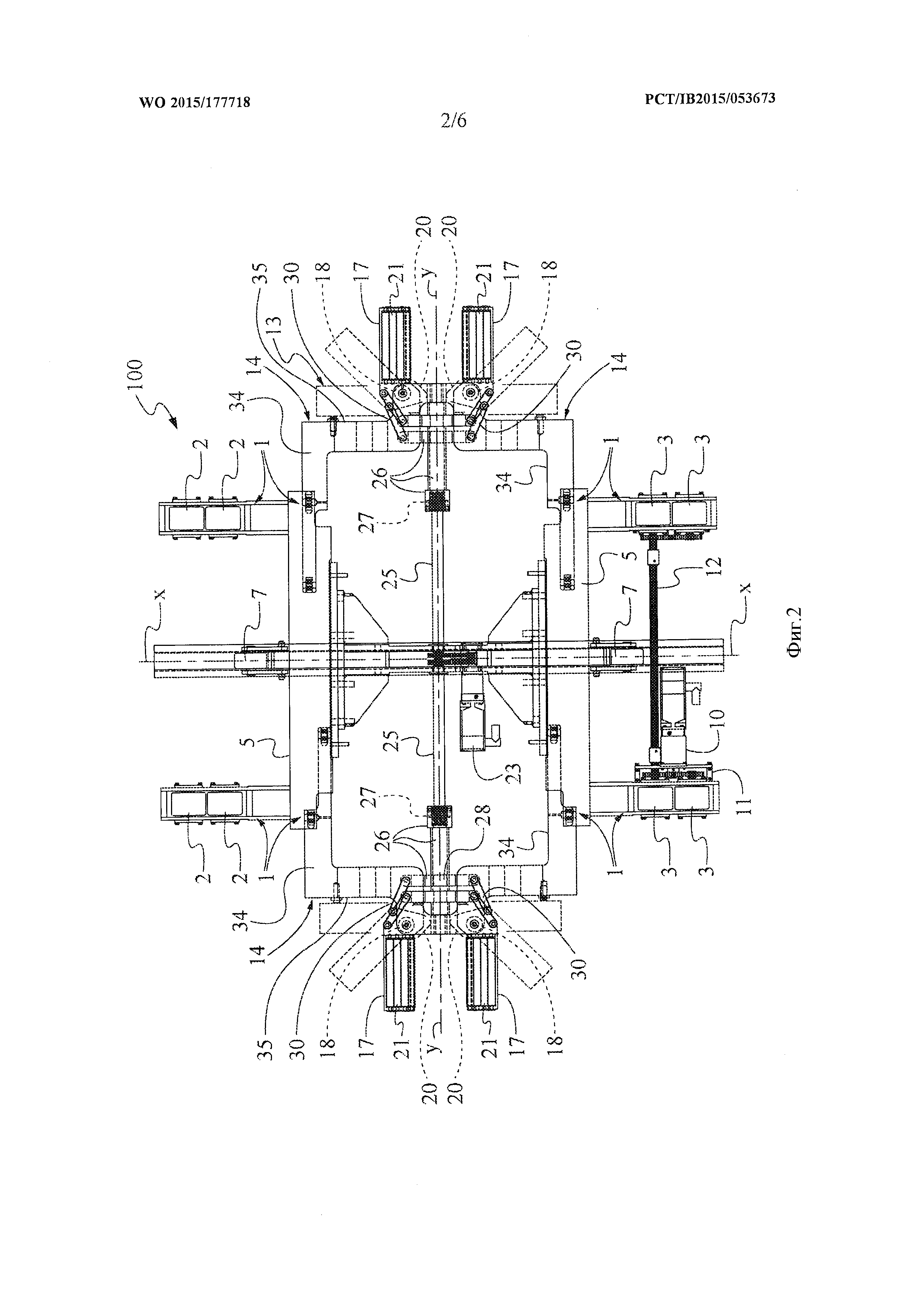
на фиг. 2 - транспортировочная тележка по фиг. 1 во втором положении с выдвинутыми подвижными опорами и захватными элементами в сомкнутом положении, вид сверху;
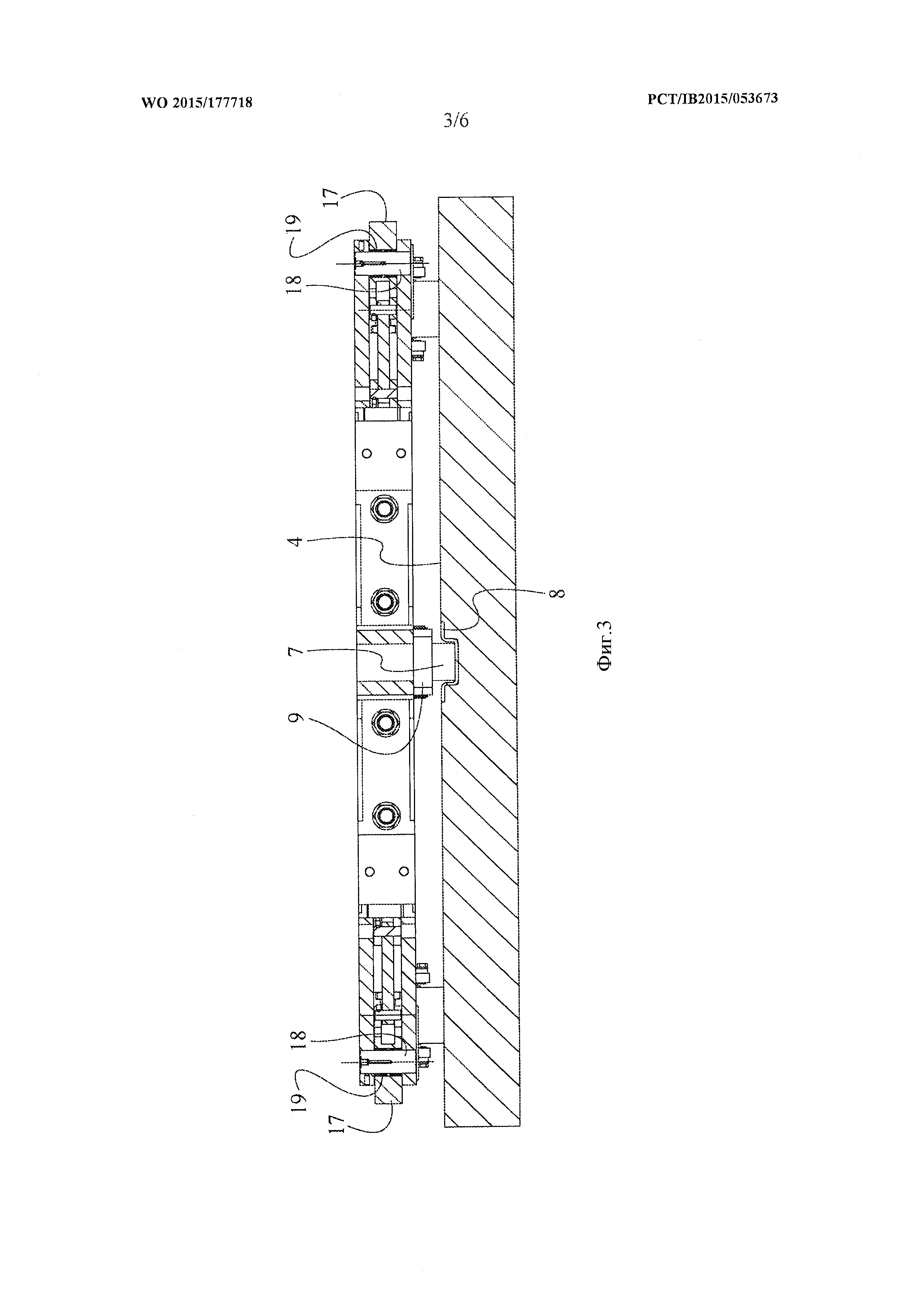
на фиг. 3 - сечение по А-А на фиг. 1;
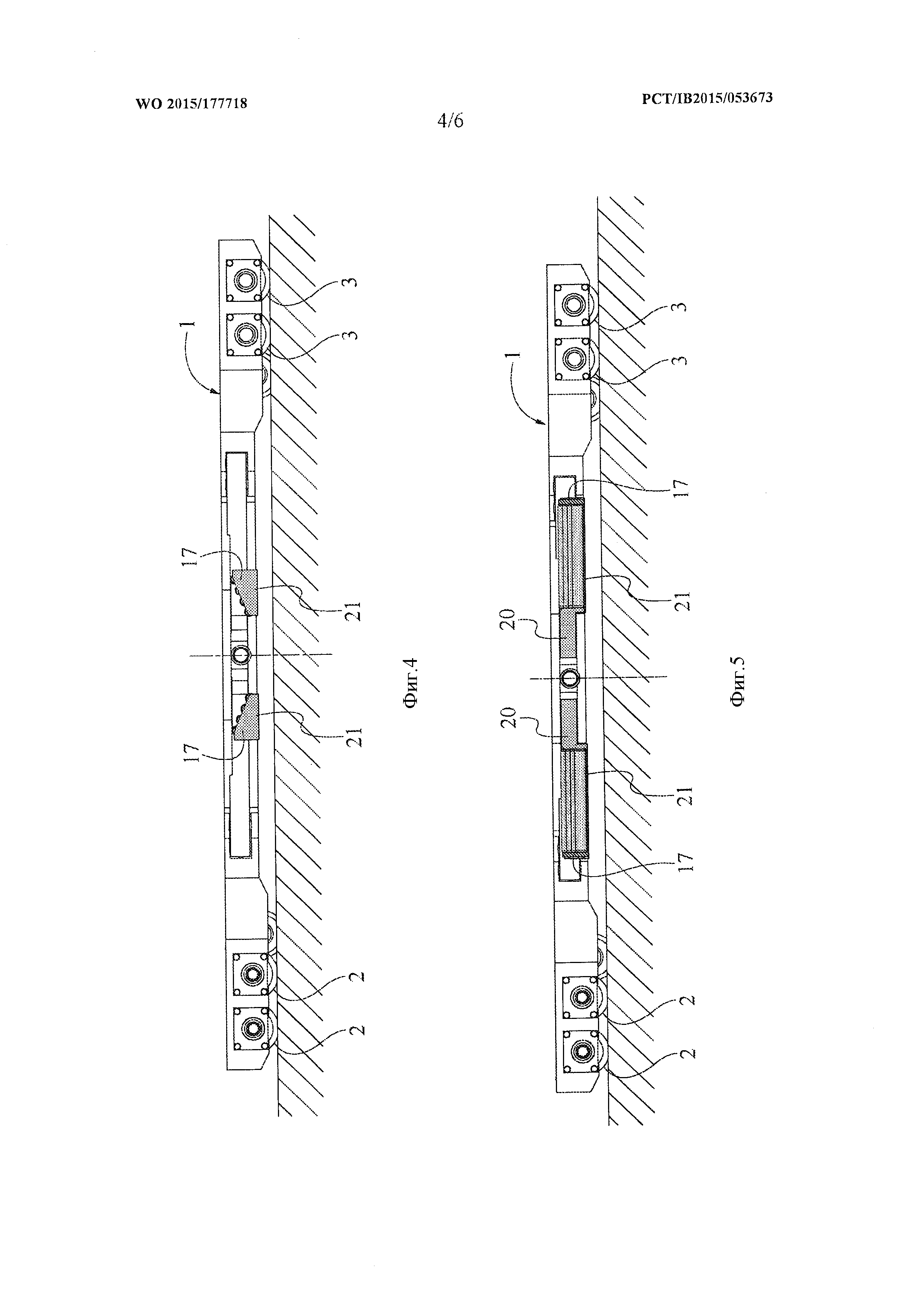
на фиг. 4 - транспортировочная тележка по фиг. 1 с захватными элементами в сомкнутом положении, вид сбоку;
на фиг. 5 - транспортировочная тележка по фиг. 1 с захватными элементами в разомкнутом положении, вид сбоку;
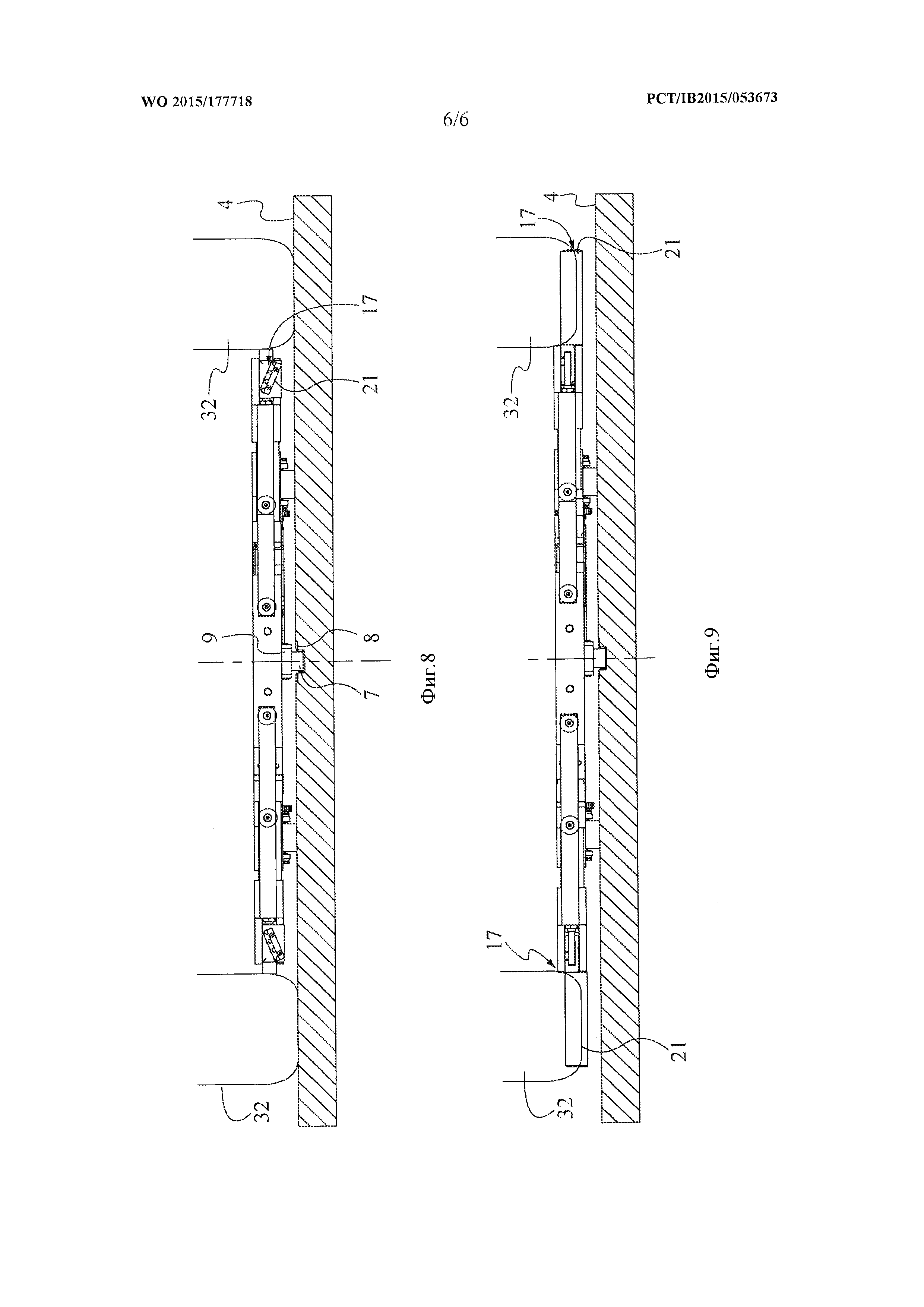
на фиг. 6, 7, 8, 9 показаны последовательные этапы центрирования, захвата и подъема колес одной оси транспортного средства, выполняемые тележкой согласно изобретению.
Осуществление изобретения
На фиг. 1-9 показана транспортировочная тележка согласно изобретению, обозначенная общей позицией 100, для автоматизированной системы механической парковки.
Тележка, показанная на чертежах, образована рамой 1 с опорными свободно вращающимися колесами 2 и приводными колесами 3, приспособленными для перемещения по плоской поверхности 4, такой как верхняя поверхность платформы вертикального и/или горизонтального перемещения к месту парковки автомобиля.
Свободно вращающиеся колеса 2 и приводные колеса 3 поддерживают раму 1, которая предпочтительно имеет две поперечные балки 5, соединенные центральной балкой 6.
На двух поперечных балках 5 закреплены два колеса 7, которые направляют транспортировочную тележку при ее поступательном перемещении.
Предпочтительно колеса 7 перемещаются по прямолинейному каналу 8, прикрепленному к плоской поверхности 4 места парковки.
Предпочтительно направляющие колеса 7 упруго связаны с поперечными балками 5 посредством угловых пружин 9. Рама 1 перемещается посредством первого мотор-редуктора 10, который посредством зубчатых колес 11 и вала 12 передает вращение ведущим колесам 3.
На раме 1 размещено устройство 13 центрирования, захвата и подъема двух колес одной оси транспортного средства. Устройства 13 расположены на раме 1 по два напротив друг друга.
В показанном на чертежах варианте выполнения упомянутое устройство 13 состоит из двух подвижных опор 14 и двух пар захватных элементов 17, по одной паре на каждую подвижную опору 14.
Каждая подвижная опора 14 предпочтительно имеет U-образную форму и содержит два плеча 34, расположенных снаружи относительно поперечины 35, при этом каждое плечо 34 может скользить в поперечной балке 5 рамы 1.
Плечи 34 каждой подвижной опоры 14 могут поперечно скользить внутрь поперечных балок 5 посредством роликов 15, направляемых выемками в поперечных балках 5.
Подвижные опоры 14 могут перемещаться между сомкнутым исходным положением, показанным на фиг. 1, и разомкнутым рабочим положением, показанным на фиг. 2, и наоборот.
В частности, две подвижные опоры 14 противоположны друг другу относительно продольной оси X-X тележки 100 и могут перемещаться относительно этой продольной оси X-X между сомкнутым исходным положением, показанным на фиг. 1, и разомкнутым рабочим положением, показанным на фиг. 2. В разомкнутом положении подвижные опоры 14 расположены дальше в поперечном направлении по сравнению с их расположением в сомкнутом положении. Разомкнутое положение не является фиксированным, определяемым конструкцией устройства 13, а является изменяемым положением, зависящим от внутреннего поперечного расстояния между шинами колес одной оси перемещаемого транспортного средства.
Поперечное расстояние между шинами колес одной оси перемещаемого транспортного средства измеряется между двумя обращенными друг к другу поверхностями двух колес одной оси транспортного средства.
Иными словами, оно изменяется в зависимости от транспортируемого транспортного средства. При центрировании транспортного средства указанное разомкнутое положение определяется каждый раз так, что, когда транспортное средство отцентрировано, продольная ось X-X тележки 100 совпадает с продольной осью этого транспортного средства.
Каждая из двух подвижных опор 14 на каждом своем соответствующем конце удерживает пару захватных элементов 17, каждый из которых может поворачиваться приблизительно на 90° вокруг штифта 18, закрепленного на этих подвижных опорах 14.
Каждый захватный элемент 17 установлен на штифте 18 посредством подшипников 19. Захватный элемент 17 состоит из подъемной лапы 21 и выступа 20, который при нахождении захватного элемента 17 в разомкнутом положении слегка выступает наружу в поперечном направлении от тележки 100.
Выступ 20 связан с подъемной лапой 21 и имеет такую форму, что, когда он прижимается к шине колеса 32 транспортного средства, то стремится повернуть подъемную лапу 21 и, следовательно, сам захватный элемент 17 из разомкнутого положения, показанного на фиг. 2 пунктирной линией, в сомкнутое положение, показанное на фиг. 2 сплошной линией.
Предпочтительно подъемная лапа 21 содержит свободно вращающиеся ролики 22, расположенные вдоль наклонной плоскости так, чтобы они могли приподнять колесо 32 транспортного средства, которое захвачено одновременно парой захватных элементов 17.
Наклонные плоскости двух захватных элементов 17 такой пары наклонены навстречу друг другу, когда подъемные лапы 21 этой пары захватных элементов 17 находятся в сомкнутом положении.
Устройство 13 центрирования, подъема и удержания колеса 32 транспортного средства приспособлено для подъема и прочного удержания двух колес 32 одной оси транспортного средства посредством одного направленного наружу поперечного перемещения подвижных опор 14 и пары объединенных с ними захватных элементов 17.
Таким образом, рама 1 всегда ориентирована в осевом направлении вдоль продольной оси X-X тележки 100. Это позволяет использовать такую тележку в ограниченном пространстве современных подземных парковок, в которых тележки выполнены с возможностью перемещения по направляющим рельсам, и для которых экономия бокового пространства, необходимого для прохождения тележек, имеет принципиальное значение. Тележка 100 также более компактна по высоте по сравнению с известными тележками благодаря сложному и уникальному перемещению, выполняемому устройством 13 центрирования, подъема и удержания колеса, в одной и той же горизонтальной плоскости, в целом, совпадающей с плоскостью рамы 1 тележки без изменения ее высоты. Кроме того, тележка 100 не требует траншеи, проходящей под транспортным средством, находясь на поверхности дороги или пола.
Поперечное перемещение U-образной подвижной опоры 14 осуществляется посредством второго мотор-редуктора 23 и зубчатых колес 24, приводящих во вращение два червячных винта 25.
Предпочтительно, имеются только два мотор-редуктора, первый 10 из которых приспособлен для продольного перемещения тележки 100 вдоль продольной оси X-X, а второй 23 приспособлен для управления поперечным перемещением подвижных опор 14. Мотор-редукторы электрически управляются блоком обработки данных, который преимущественно приспособлен для последовательного приведения в действие сначала первого мотор-редуктора 10 для позиционирования тележки в соответствии с расположением колес транспортного средства, а затем для приведения в действие второго мотор-редуктора 23 для поперечного перемещения подвижной опоры 14.
Один из двух червячных винтов 25 имеет правую резьбу, а другой - левую.
Противоположное вращение двух червячных винтов 25 перемещает практически симметрично два толкателя 26 наружу или внутрь тележки 100.
Предпочтительно каждый толкатель 26 выполнен в виде ползуна с гайкой 27 и удлиненной втулкой с пересекающей ее перекладиной 28, к концам которой прикреплены штифты 29 с шарнирно установленными на них двумя толкающими стержнями 30.
Два толкающих стержня 30 своими противоположными концами шарнирно соединены со штифтами 31 каждой пары захватных элементов 17.
Толкатели 26 перемещают подвижные опоры 14 и, следовательно, объединенные с ними пары захватных элементов 17 внутрь или наружу тележки 100.
Перемещаясь поперек в направлении наружу, подвижные опоры 14 упирают выступы 20 в шину колеса 32 транспортного средства, и, когда выступы 20 толкают шину колеса 32 в осевом направлении наружу транспортного средства, они обеспечивают поворот захватных элементов 17 каждой пары, обеспечивая таким образом захват и подъем колеса 32 транспортного средства.
Когда пользователь заезжает на транспортном средстве в приемное помещение для автоматизированной парковки, он оставляет транспортное средство на специально обозначенной площадке. Положение осей транспортного средства может быть определено посредством известных устройств, таких как тензодатчики, фотоэлементы, фотоэлектрические барьеры, лазерные сканеры, камеры и т.п. Так как тележка 100 согласно изобретению может поднять два колеса 32 одной оси, операция транспортировки транспортного средства должна выполняться с использованием двух тележек 100, расположенных последовательно в продольном направлении, и в некоторых случаях соединенных друг с другом.
На первом этапе каждая из тележек 100 позиционируется посредством известных способов управления положением и перемещением, так чтобы собственная поперечная ось приблизительно совпадала с осью пары колес 32 транспортного средства.
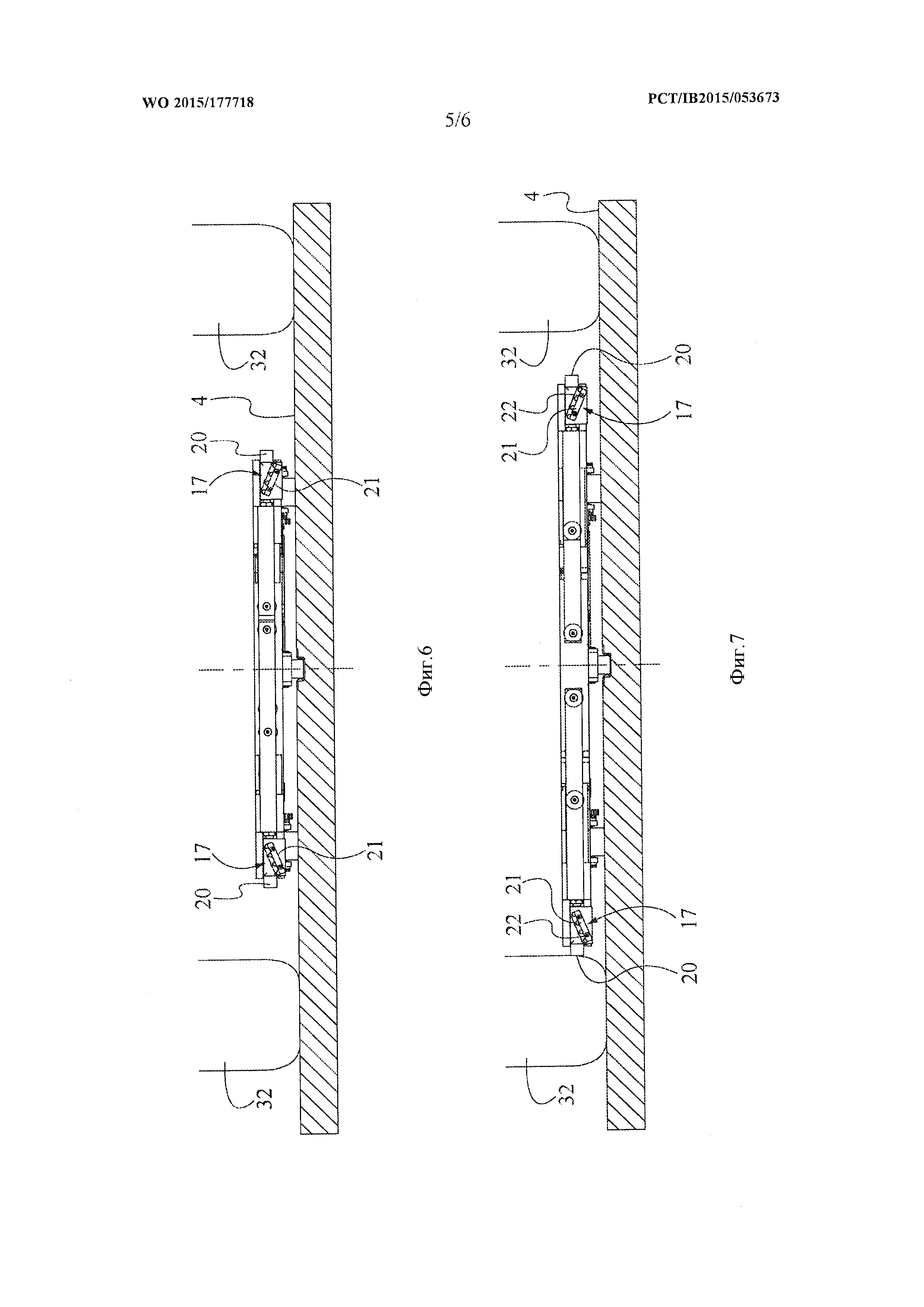
Положение двух колес 32 транспортного средства, продольная ось которого обычно не совпадает с продольной осью тележки 100, показано на фиг. 6. Каждое колесо находится на разном расстоянии от продольной оси тележки 100.
На фиг. 6-9 в качестве примера схематично показаны некоторые этапы центрирования, подъема и удержания двух колес 32 одной оси транспортного средства посредством тележки 100.
На фиг. 6 показана тележка 100 располагающаяся под транспортным средством.
С этого момента начинается операция центрирования, подъема и удержания колес посредством симметричного толкания наружу двух устройств 13.
На втором и последующих этапах одно из двух устройств 13 встречается с первым колесом 32 (фиг. 7) и, толкая его путем приложения к нему поперечного относительно продольной оси Х-Х усилия, перемещает это колесо до момента, когда второе устройство 13 не упрется во второе колесо 32 (фиг. 8).
В дальнейшем при непрерывном перемещении толкателей 26 устройство 13 не сможет переместить второе колесо 32 в направлении наружу из-за того фиксированного внутреннего расстояния между колесами 32, и, следовательно, не сможет переместить дальше и первое колесо 32, в результате чего возникает вращательное движение захватных элементов 17 двух пар.
В частности, поворот захватных элементов 17 каждой пары обеспечивается силами реакции, действующими на выступы 20 со стороны колес 32.
Действие указанных сил реакции, вынуждающих захватные элементы 17 слегка повернуться вокруг пальцев 18, приводит к тому, что ось толкающих стержней 30, вместо того, чтобы проходить через ось штифта 18, вокруг которого поворачиваются захватные элементы 17, немного смещается, создавая пару сил, обеспечивающую поворот этих захватных элементов 17 и все больше увеличивающуюся по мере дальнейшего поворота этих элементов, пока колеса 32 не поднимутся, как показано на фиг. 9.
На фиг. 9 показано конечное положение двух колес 32 одной оси транспортного средства и их удержание посредством конечного участка U-образных подвижных опор 14 от продольных перемещений, вызываемых ускорениями при транспортировке транспортного средства.
Хотя изобретение описано со ссылкой на некоторые конкретные варианты его осуществления, возможны различные модификации и изменения, не выходящие за объем формулы изобретения.
Самодвижущаяся тележка на колесах и способ управления тележкой

