Результат интеллектуальной деятельности: РАДИОВЫСОТОМЕРНАЯ СИСТЕМА С АДАПТАЦИЕЙ К ГЛАДКОЙ ВОДНОЙ ПОВЕРХНОСТИ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и может быть использовано в бортовых навигационных системах летательных аппаратов (ЛА).
Известно устройство [1], реализующее способ измерения скорости ЛА относительно подстилающей поверхности, заключающийся в определении корреляционной временной задержки по равенству коэффициента автокорреляции в одном из приемных каналов, коэффициенту взаимной корреляции сигналов двух приемников, вычислении коэффициента автокорреляции во втором приемном канале и нахождении временного положения максимума функции взаимной корреляции сигналов этих приемников. При этом для вычисления скорости используют среднее значение коэффициентов автокорреляции.
Основным недостатком данного устройства является использование двух приемных антенн, что не позволяет производить измерения скорости ЛА с заданной точностью при эволюциях объекта над разнообразными типами поверхностей (море, лес и т.п.). Вариант расположения приемных антенн, предлагаемый в [1], не позволяет производить измерения скорости ЛА при малых углах сноса (либо при отсутствии сноса), так как в этом случае максимум коэффициента взаимной корреляции определяется разносом антенн по поперечной оси ЛА. При малых углах сноса коэффициент взаимной корреляции мал, что ведет к повышенным погрешностям измерения составляющих вектора путевой скорости. Повысить коэффициент взаимной корреляции возможно путем сближения приемных антенн, однако минимальное расстояние между антеннами ограничено их геометрическими размерами.
Известен корреляционный измеритель скорости полета и угла сноса [2], который содержит четыре антенны, два приемника, два дискретизатора по времени, линию задержки, коммутатор, два перемножителя, направленный ответвитель, генератор тактовых импульсов, два фильтра нижних частот, передатчик, двигатель, индикатор пути, блок вычитания, блок слежения, три двухсторонних ограничителя, индикаторы скорости ветра и угла сноса, два блока совпадения и делитель.
Основным недостатком данного устройства является использование для оценки положения максимумов взаимно-корреляционных функций (ВКФ) пространственно разнесенных сигналов метода вилки при определении транспортного запаздывания, который не позволяет обеспечить высокую точность измерений составляющих вектора путевой скорости.
Наиболее близким по технической сущности является импульсно-доплеровская радиовысотомерная система [3], содержащая синхронизатор, вычислительное устройство, первый, второй и третий аналого-цифровые преобразователи (АЦП), фазовращатель, передающую антенну, приемную антенную систему (АС), импульсный модулятор, управляемый аттенюатор, первый, второй и третий видеоусилители, буферное оперативное запоминающее устройство (БОЗУ), блок регулировки усиления, блок регулировки ослабления, источник тока, управляемый напряжением (УН), контроллер обмена, первый, второй и третий малошумящие усилители высокой частоты (УВЧ), первый, второй и третий фазовые детекторы, направленный ответвитель, дискретно управляемый сверхвысокочастотный (СВЧ) генератор, выход которого соединен со входом направленного ответвителя, второй выход которого соединен со вторыми входами первого, второго и третьего фазовых детекторов, первые входы которых соединены соответственно с выходами первого, второго и третьего малошумящих УВЧ, входы которых соединены с выходами приемной АС, а первый выход направленного ответвителя соединен с первым входом импульсного модулятора, второй вход которого соединен со вторым выходом синхронизатора, выход импульсного модулятора соединен со вторым входом фазовращателя, первый вход которого соединен с первым выходом синхронизатора, а выход - с первым входом управляемого аттенюатора, выход которого соединен со входом передающей антенны, а второй вход управляемого аттенюатора соединен с выходом источника тока УН, вход которого соединен с выходом блока регулировки ослабления, все первые входы которого соединены по шине данных со всеми первыми входами блока регулировки усиления, всеми шестыми входами/выходами БОЗУ, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами системы, а также всеми двенадцатыми входами/выходами вычислительного устройства, второй, третий, четвертый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления, блока регулировки усиления, контроллера обмена, а пятый, шестой, седьмой, тринадцатый выходы - соответственно со вторым, третьим, четвертым, седьмым входами БОЗУ, восьмой, девятый выходы - соответственно со вторым и третьим входами синхронизатора, десятый, одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора, первый вход - с четвертым выходом синхронизатора, первый вход которого соединен с выходом БОЗУ, первый вход которого соединен с третьим выходом синхронизатора и вторыми входами первого, второго и третьего АЦП, все выходы которых соединены соответственно с пятыми, восьмыми и девятыми входами БОЗУ, а первые входы первого, второго и третьего АЦП - соответственно с выходами первого, второго и третьего видеоусилителей, первые входы которых соединены соответственно с выходами первого, второго и третьего фазовых детекторов, вторые входы - с выходом блока регулировки усиления.
Недостатком прототипа рассматриваемого устройства является неустойчивое измерение и аномально высокая погрешность составляющих вектора путевой скорости над гладкой водной поверхностью (волнение от 0 до 1 балла), так как гладкая водная поверхность имеет узкую диаграмму
обратного рассеяния (ДОР) порядка 1-2 градусов [4]. Узкая ширина ДОР приводит к значительному обужению спектра доплеровских флюктуации амплитуды отраженных сигналов и, как следствие, к декорреляции пространственно разнесенных отраженных сигналов, появлению аномально больших погрешностей измеряемых скоростей.
Целью изобретения является повышение устойчивости и точности измерения составляющих вектора путевой скорости ЛА над гладкой водной поверхностью.
Указанная цель достигается тем, что в устройство [3], содержащее синхронизатор, вычислительное устройство, первый, второй и третий АЦП, фазовращатель, передающую антенну, приемную АС, импульсный модулятор, управляемый аттенюатор, первый, второй и третий видеоусилители, БОЗУ, блок регулировки усиления, блок регулировки ослабления, источник тока УН, контроллер обмена, первый, второй и третий малошумящие УВЧ, дискретно управляемый СВЧ генератор, первый направленный ответвитель, первый, второй и третий фазовые детекторы, первые входы которых соединены соответственно с выходами первого, второго и третьего малошумящих УВЧ, входы которых соединены соответственно с выходами приемной АС, а второй вход импульсного модулятора соединен со вторым выходом синхронизатора, выход импульсного модулятора соединен со вторым входом фазовращателя, первый вход которого соединен с первым выходом синхронизатора, а выход - с первым входом управляемого аттенюатора, выход которого соединен со входом передающей антенны, а второй вход управляемого аттенюатора соединен с выходом источника тока УН, вход которого соединен с выходом блока регулировки ослабления, все первые входы которого соединены по шине данных со всеми первыми входами блока регулировки усиления, всеми шестыми входами/выходами БОЗУ, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами системы, а также всеми двенадцатыми входами/выходами вычислительного устройства, второй, третий, четвертый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления, блока регулировки усиления, контроллера обмена, а пятый, шестой, седьмой, тринадцатый выходы - соответственно со вторым, третьим, четвертым, седьмым входами БОЗУ, восьмой, девятый выходы -соответственно со вторым и третьим входами синхронизатора, десятый, одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора, выход которого соединен со входом первого направленного ответвителя, первый вход вычислительного устройства соединен с четвертым выходом синхронизатора, первый вход которого соединен с выходом БОЗУ, первый вход которого соединен с третьим выходом синхронизатора и вторыми входами первого, второго и третьего АЦП, все выходы которых соединены соответственно с пятыми, восьмыми и девятыми входами БОЗУ, а первые входы первого, второго и третьего АЦП - соответственно с выходами первого, второго и третьего видеоусилителей, первые входы которых соединены соответственно с выходами первого, второго и третьего фазовых детекторов, вторые входы - с выходом блока регулировки усиления, введены первый, второй переключатели несущей частоты [5], умножитель частоты [6], второй и третий направленные ответвители, делитель мощности [5], при этом, первый, второй и третий выходы делителя мощности соединены соответственно со вторыми входами первого, второго и третьего фазовых детекторов, а вход делителя мощности соединен с выходом второго переключателя несущей частоты, второй вход которого соединен со вторым выходом второго направленного ответвителя, первый выход которого соединен со вторым входом первого переключателя несущей частоты, выход которого соединен с первым входом импульсного модулятора, а первые входы первого и второго переключателей несущей частоты соединены соответственно с первым и вторым выходами третьего направленного ответвителя, вход которого соединен с выходом умножителя частоты, вход которого соединен со вторым выходом первого направленного ответвителя, первый выход которого соединен со входом второго направленного ответвителя, а четырнадцатый выход вычислительного устройства соединен с третьими входами первого и второго переключателей несущей частоты.
Заявляемая радиовысотомерная система (РВС) с адаптацией к гладкой водной поверхности излучает в направлении подстилающей поверхности и принимает короткие пакеты радиоимпульсов, преобразующиеся в приемнике в биполярные видеоимпульсы, огибающая которых флюктуирует по амплитуде с частотой, определяемой доплеровским сдвигом частоты сигналов, отраженных от подстилающей поверхности (фиг. 1).
Составляющие вектора путевой скорости определяются по максимуму ВКФ пространственно разнесенных между собой отраженных от подстилающей поверхности сигналов, принимаемых разнесенными антеннами, расположенными на ЛА, с учетом геометрии антенной системы [7].
Порядок приема отраженных радиоимпульсов на три разнесенные антенны показан на фиг. 2.
Минимальный период повторения импульсов при работе в режиме однозначности определяется высотой полета ЛА, а именно, должно выполняться соотношение

где Тп - период повторения импульсов;
τ - длительность импульса;
Н - высота полета;
с - скорость электромагнитных волн.
Таким образом, шаг дискретизации Δt ВКФ пространственно разнесенных сигналов, принятых на каждую антенну, составляет два периода повторения импульсов

и его минимальное значение ограничено выражением (1).
Пространственный интервал корреляции ΔХ принятых на антенны сигналов зависит от длины волны λ излучаемого сигнала и статистических свойств подстилающей поверхности. Ширина ВКФ ΔT сигналов связана с пространственным интервалом корреляции соотношением

где V - скорость ЛА.
Из выражения (3) следует, что ширина ВКФ ΔT зависит от скорости ЛА и пространственного интервала корреляции.
При полете ЛА над гладкой водной поверхностью возникают значительные погрешности измерения составляющих вектора скорости, поскольку ВКФ принимаемых сигналов расширяются, а коэффициенты взаимной корреляции уменьшаются.
В соответствии с [7], выражения для коэффициентов взаимной корреляции сигналов каждой из двух пар антенн (фиг. 5) имеют вид:
где
 ,
,
 ,
,
 ,
,
 ;
;
 ,
,
 - длина волны;
- длина волны;
Δ - эффективная ширина диаграммы направленности антенны (ДНА), которая учитывает как собственно ширину ДНА, так и ширину ДОР поверхности;
Х0, Y0 - параметры антенной системы;
α - угол сноса;
β - угол между линией расположения излучателей и продольной осью АС.
Из выражений (4) следует, что коэффициенты взаимной корреляции уменьшаются пропорционально квадрату эффективной ширины ДНА, что и является причиной увеличения погрешности измерения составляющих вектора скорости над гладкой водной поверхностью.
Следовательно, для снижения погрешности измерения составляющих вектора скорости над гладкой водной поверхностью, необходимо увеличивать коэффициенты взаимной корреляции одним из приведенных ниже способов (в соответствии с выражениями (4)):
- уменьшением длины волны λ;
- изменением геометрических размеров АС.
Применение в АС РВС широкодиапазонных излучателей [8] позволяет изменять несущую частоту в широких пределах без изменения геометрии приемной АС, что над поверхностью с узкой ДОР приводит к обужению ВКФ и, в свою очередь, повышает точность определения максимума ВКФ и, соответственно, составляющих вектора скорости.
Управление переключением несущей частоты осуществляется вычислительным устройством по значению оценки ширины ВКФ (фиг. 9). Чем больше ширина ВКФ, тем меньше ширина ДОР подстилающей поверхности. При увеличении ширины ВКФ и достижении заданного порога, что соответствует гладкой водной поверхности, вычислительное устройство переключает несущую частоту на значение ƒ1=n⋅ƒ0, где n - коэффициент кратности (n>1 и зависит от широкодиапазонности АС). В остальных случаях РВС с адаптацией к гладкой водной поверхности работает на несущей частоте ƒ0, как прототип.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков и их связями между собой и с другими блоками прототипа.
Таким образом, заявляемое устройство соответствует критерию «новизна».
Сравнение заявляемого решения с другими техническими решениями показывает, что введение новых блоков и связей в РВС с адаптацией к гладкой водной поверхности в указанной совокупности признаков не обнаружено и приводит к повышению устойчивости и точности измерения, составляющих вектора путевой скорости ЛА над гладкой водной поверхностью, что позволяет сделать вывод о соответствии технического решения критерию «существенные отличия».
Для измерения предельно малых высот передающая антенна выполнена в виде отдельного блока, подключенного к выходу управляемого аттенюатора, и разнесена с приемной АС на определенное расстояние для обеспечения высокой развязки по наведенному в момент излучения на приемник «прямому» сигналу.
На фиг. 1 представлены квадратурные составляющие биполярных видеоимпульсов, огибающая которых флюктуирует по амплитуде с частотой, определяемой доплеровским сдвигом частоты сигналов, отраженных от подстилающей поверхности. На фиг. 2 представлен порядок приема импульсов на три разнесенные антенны заявляемой РВС. На фиг. 3 представлена блок-схема РВС с адаптацией к гладкой водной поверхности. На фиг. 4 представлен алгоритм работы подпрограммы установки режима приемопередающего модуля (ППМ) при излучении радиоимпульсов и накоплении радиоимпульсов, отраженных от подстилающей поверхности. На фиг. 5 представлена антенная система РВС с адаптацией к гладкой водной поверхности. На фиг. 6 представлено восстановление отраженного сигнала методом нониуса. На фиг. 7 представлен алгоритм программной регулировки усиления приемного тракта и мощности излучения. На фиг. 8 представлен алгоритм работы подпрограммы вычисления продольной Vx и поперечной Vz составляющих вектора скорости. На фиг. 9 представлен алгоритм работы подпрограммы установки несущей частоты.
РВС с адаптацией к гладкой водной поверхности содержит дискретно управляемый СВЧ генератор 1, второй направленный ответвитель 2, импульсный модулятор 3, фазовращатель 4, управляемый аттенюатор 5, второй малошумящий УВЧ 6, третий малошумящий УВЧ 7, первый малошумящий УВЧ 9, первый фазовый детектор 10, второй фазовый детектор 73, третий фазовый детектор 74, первый видеоусилитель 11, второй видеоусилитель 75, третий видеоусилитель 76, первый АЦП 12, второй АЦП 77, третий АЦП 78, БОЗУ 13, синхронизатор 14, вычислительное устройство 15, контроллер обмена 16, блок регулировки усиления 17, блок регулировки ослабления 18, источник тока УН 19, приемная антенная система 70, передающая антенна 71, а также первый направленный ответвитель 79, третий направленный ответвитель 80, умножитель частоты 81, первый переключатель несущей частоты 82, второй переключатель несущей частоты 83, делитель мощности 84.
При этом, выход дискретно управляемый СВЧ генератора 1 соединен со входом первого направленного ответвителя 79, первый выход которого соединен со входом второго направленного ответвителя 2, а второй выход -со входом умножителя частоты 81, выход которого соединен со входом третьего направленного ответвителя 80, первый и второй выходы которого соединены соответственно с первыми входами первого и второго переключателей несущей частоты 82 и 83, третьи входы которых соединены с четырнадцатым выходом вычислительного устройства 15, а вторые входы которых соединены соответственно с первым и вторым выходами второго направленного ответвителя 2, а выход первого переключателя несущей частоты 2 соединен с первым входом импульсного модулятора 3, второй вход которого соединен со вторым выходом синхронизатора 14, а выход - со вторым входом фазовращателя 4, первый вход которого соединен с первым выходом синхронизатора 14, а выход - с первым входом управляемого аттенюатора 5, выход которого соединен со входом передающей антенны 71, а второй вход - с выходом источника тока УН 19, вход которого соединен с выходом блока регулировки ослабления 18, все первые входы которого соединены по шине данных со всеми первыми входами блока регулировки усиления 17, всеми шестыми входами/выходами БОЗУ 13, всеми первыми входами/выходами контроллера обмена 16, все третьи входы/выходы которого являются входами/выходами системы, а также всеми двенадцатыми входами/выходами вычислительного устройства 15, второй, третий, четвертый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления 18, блока регулировки усиления 17, контроллера обмена 16, а пятый, шестой, седьмой, тринадцатый выходы -соответственно со вторым, третьим, четвертым, седьмым входами БОЗУ 13, восьмой, девятый выходы - соответственно со вторым и третьим входами синхронизатора 14, десятый, одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора 1, первый вход - с четвертым выходом синхронизатора 14, первый вход которого соединен с выходом БОЗУ 13, первый вход которого соединен с третьим выходом синхронизатора 14 и вторыми входами первого, второго и третьего АЦП 12, 77 и 78, все выходы которых соединены соответственно с пятыми, восьмыми и девятыми входами БОЗУ 13, а первые входы - соответственно с выходами первого, второго и третьего видеоусилителей 11, 75 и 76, вторые входы которых соединены с выходом блока регулировки усиления 17, а первые входы - соответственно с выходами первого, второго и третьего фазовых детекторов 10, 73 и 74, вторые входы которых соединены соответственно с первым, вторым и третьим выходами делителя мощности 84, вход которого соединен с выходом второго переключателя несущей частоты 83, а первые входы первого, второго и третьего фазовых детекторов 10, 73 и 74 соединены соответственно с выходами первого, второго и третьего малошумящих УВЧ 9, 6 и 7, входы которых соединены соответственно с первым, вторым и третьим выходами приемной АС 70.
Следует отметить, что импульсный модулятор 3 [5], фазовращатель 4 [5], управляемый аттенюатор 5 [5], первый, второй и третий малошумящие УВЧ 9, 6 и 7 [9, 10], первый, второй и третий фазовые детекторы 10, 73 и 74 [11] - работают в широком диапазоне частот. Введенные элементы: первый и второй переключатели несущей частоты 82, 83 [5], второй и третий направленные ответвители 79, 80, делитель мощности [5], умножитель частоты 81 [6] - широко известны.
В качестве излучателей в приемной АС 70 и передающей антенне 71 могут быть использованы широкополосные рупорные антенны, работающие в требуемом СВЧ диапазоне [8].
РВС с адаптацией к гладкой водной поверхности работает следующим образом.
После подачи питания (аналогично прототипу) вычислительное устройство 15 проводит начальную установку флага излучения синхронизатора 14, сигналами 64 и 65 записывает нулевое значение усиления и ослабления в блоки 17 и 18 регулирования усиления и ослабления (Nус=0, Nосл=0), записывает сигналами 52 и 53 по шине данных 55 в счетчик адреса ОЗУ БОЗУ 13 нулевое значение кода (устанавливается тем самым низкий логический уровень сигнала - окончание режима излучения и накопления), проводит опрос контроллера обмена 16 с внешними системами, который переводит измеритель в режим измерения задержки отраженного от подстилающей поверхности сигнала, устанавливает сигналами 63 и 67 частоту ƒ0 СВЧ генератора 1 на середину рабочего диапазона.
После этого вычислительное устройство 15 запускает подпрограмму установки параметров приемопередающего модуля (ППМ) и старта излучения и накопления, которая в свою очередь запускает подпрограмму установки несущей частоты. Алгоритмы работы подпрограмм приведены соответственно на фиг. 4 и фиг. 9. Подпрограмма установки несущей частоты формирует в вычислительном устройстве 15 сигнал управления, который, в зависимости от ширины ВКФ принятых сигналов, изменяет несущую частоту в первом и втором переключателях несущей частоты 82 и 83. Для устранения дребезга по переключению несущей частоты осуществляется гистерезис по порогу переключения (фиг. 9). А подпрограмма установки параметров ППМ и старта излучения и накопления устанавливает на дискретно управляемом СВЧ генераторе 1 частоту/о, записывает в блоки 17 и 18 регулирования усиления и ослабления значения усиления и ослабления, записывает нулевое значение кода в счетчик адреса ОЗУ БОЗУ, запускает таймер на время tуст.ППМ - время установки параметров в ППМ (дискретно управляемый СВЧ генератор 1, первый, второй и третий направленные ответвители 2, 79, 80, умножитель частоты 81, первый и второй переключатели несущей частоты 82 и 83, делитель мощности 84, импульсный модулятор 3, фазовращатель 4, управляемый аттенюатор 5, первый, второй и третий малошумящие УВЧ 9, 6 и 7, первый, второй и третий фазовые детекторы 10, 73 и 74, первый, второй и третий видеоусилители 11, 75 и 76), после чего проводится запуск режима излучения и накопления как показано на фиг. 2, анализ флага излучения.
Через передающую антенну 71 обеспечивается излучение радиоимпульсов по направлению к подстилающей поверхности.
Принятые от подстилающей поверхности приемной антенной системой 70 радиоимпульсы поступают одновременно на входы идентичных первого, второго и третьего малошумящих УВЧ 9, 6 и 7, усиливаются и через идентичные первый, второй и третий фазовые детекторы 10, 73 и 74, где преобразуются в видеоимпульсы, поступают на первый, второй и третий видеоусилители 11, 75 и 76, затем на первый, второй и третий АЦП 12, 77 и 78 и далее через 5, 8 и 9 входы БОЗУ одновременно записываются в БОЗУ 13.
По окончанию работы подпрограммы вычислительное устройство 15 считывает данные БОЗУ 13, после чего производит обработку данных, сканируя по диапазону задержек, определяя временную задержку цифровых сигналов от подстилающей поверхности.
Излучение и тактирование АЦП 12 (77 и 78) и запись в БОЗУ 13 начинаются в момент t0 (фиг. 6). Радиоимпульсы излучаются по тактам с номерами 0, km+1, 2(km+1), …, n(km+1), … (фиг. 6а, 6б), где m - параметр нониуса, k - расширитель временного диапазона для сигнала, n - номер излучения, Tизл - период тактовых импульсов.
Преобразование принятого сигнала (фиг. 6в) в АЦП 12 (77 и 78) и запись в БОЗУ 13 проводится по каждому такту с периодом ТОЗУ (фиг. 6г, 6д). Если выполняется условие совпадения фронтов тактовых импульсов излучения и тактирования АЦП 12 (77 и 78) и БОЗУ 13:

Условие (5) можно записать в виде:

где  - частота тактовых импульсов излучения;
- частота тактовых импульсов излучения;
 - частота тактовых импульсов АЦП 12 (77 и 78) и БОЗУ 13.
- частота тактовых импульсов АЦП 12 (77 и 78) и БОЗУ 13.
Если второе и последующее излучения выдавать в моменты n(km+1)⋅Тизл, то следующий такт АЦП 12 (77 и 78) и БОЗУ 13 придет в момент n(k(m-1)+1)⋅ТОЗУ с задержкой dt⋅n, то из уравнения:
n(km+1)⋅Тизл+dt⋅n=n(k(m-1)+1)⋅ ТОЗУ
Можно показать, что n-тое излучение начинается раньше n(k(m-1)+1) тактового импульса АЦП 12 (77 и 78) и БОЗУ 13 на величину:
 .
.
Отсюда получаем, что для восстановления принятого сигнала с шагом  необходимо Nизл=m, а объем БОЗУ 13 LОЗУ определяется из уравнения:
необходимо Nизл=m, а объем БОЗУ 13 LОЗУ определяется из уравнения:
m(km+1)⋅Тизл=LОЗУ⋅ТОЗУ,
Тогда объем БОЗУ 13, необходимый для восстановления принятого сигнала, равен LОЗУ={km+Y)(m-1).
Выше проведенные рассуждения позволяют получить, что для восстановления значения принятого сигнала на задержке i⋅dt в цифровом виде можно вывести выражение:
 ,
,
где скобки {…} - содержимое ячейки ОЗУ с данным номером;
выражение (imodM) - остаток от деления i на М;
скобка […] - целая часть числа;
М=k(m-1)+1.
На фиг. 6е показан пример восстановленного сигнала для k=1, m=8.
При отражении от подстилающей поверхности изменение ослабления отраженных сигналов на входах первого, второго и третьего малошумящих УВЧ 9, 6 и 7 может составлять порядка 30 дБ, что приводит к флюктуациям амплитуды и изменению крутизны фронта отраженного сигнала и, как следствие, к дополнительной погрешности измерения задержки отраженного сигнала и высоты полета ЛА.
Для поддержки стабильной крутизны фронта восстановленного сигнала на задержке i⋅dt вычислительное устройство 15 запускает после окончания каждого цикла излучения и накопления подпрограмму автоматической регулировки усиления первого, второго и третьего видеоусилителей 11, 75 и 76 и мощности излученных радиоимпульсов посредством блока регулировки усиления 17, блока регулировки ослабления 18 и источника тока УН (фиг. 7). Проводится оценка уровня восстановленного отраженного сигнала. Если уровень сигнала превышает пороговый, то производится уменьшение излучаемой мощности и усиления первого, второго и третьего видеоусилителей 11, 75 и 76, если не превышает порог - то увеличение.
После стабилизации крутизны фронта отраженного сигнала (примерно 5-6 излученных пакетов радиоимпульсов) вычислительное устройство 15 выдает результат измеренной высоты полета в контроллер обмена 16 и переводит измеритель в режим измерения продольной и поперечной составляющих вектора путевой скорости.
Включается алгоритм работы подпрограммы вычисления продольной и боковой составляющих Vx и Vz (фиг. 8).
Одним из факторов, влияющих на точность измерения составляющих вектора скорости, является положение сигнального строба (сечения) на отраженном от подстилающей поверхности сигнале. На максимуме импульса обеспечивается максимальная мощность флюктуаций сигнала, поэтому сечение на огибающей отраженного от подстилающей поверхности сигнала устанавливается в области его максимума. Затем, на этом сечении производится выборка значений сигнального среза, запоминание их в БОЗУ 13.
Использование многоканального приемного устройства позволяет принимать отраженные от подстилающей поверхности радиоимпульсы одновременно на все приемные антенны в порядке приема, как показано на фиг. 2.
В этом случае шаг дискретизации Δt сигнала, принятого на каждую антенну, и, соответственно, шаг построения ВКФ составляет два периода повторения импульсов Δt=2ТП.
Поскольку, ослабления сигналов в СВЧ - трактах каждой из приемных антенн могут несколько отличаться, то для обеспечения точности измерения составляющих вектора путевой скорости, перед построением ВКФ в вычислительном устройстве 15 производится нормирование мощности сигналов по каждой из трех антенн:
 ,
,  ,
,  , k=0…N-1,
, k=0…N-1,
где  ,
,  ,
,  - значения исходных ненормированных сигналов, принятых на 1-ю, 2-ю и 3-ю антенны в моменты времени tk; если отсчитывать время от начала пакета, то
- значения исходных ненормированных сигналов, принятых на 1-ю, 2-ю и 3-ю антенны в моменты времени tk; если отсчитывать время от начала пакета, то
t0=0, t1=Δt, …, tN-1=(N-1)Δt,
где Δt - временной шаг оцифровки сигнала;
N - количество отсчетов времени;
 ,
,  ,
,  - нормированные сигналы, принятые на 1-ю, 2-ю и 3-ю антенны в те же моменты времени tk;
- нормированные сигналы, принятые на 1-ю, 2-ю и 3-ю антенны в те же моменты времени tk;
 ,
,  ,
,  - средние значения исходных сигналов на промежутке времени от t0 до tN-1;
- средние значения исходных сигналов на промежутке времени от t0 до tN-1;
 ,
,  ,
,  - нормированные сигналы, принятые на 1-ю, 2-ю и 3-ю антенны в моменты времени tj;
- нормированные сигналы, принятые на 1-ю, 2-ю и 3-ю антенны в моменты времени tj;
U0 - константа, задающая средний уровень нормированных сигналов.
Вычисляются мгновенные значения ВКФ между сигналами, принятых 1-й и 2-й, 2-й и 3-й антеннами:
 ,
,
 ,
,
где В - количество отсчетов времени в базовом интервале, использующемся при построении ВКФ;
K - количество отсчетов построения ВКФ (подразумевается, что выполняется условие B+K≤N, где N - количество отсчетов времени оцифрованного сигнала);
Z - номер отсчета ВКФ, соответствующий 0-й задержке между сигналами (подразумевается, что выполняются условия Z<K и Z+K≤N);
 - ВКФ между сигналами, принятыми на 1-ю и 2-ю антенну, k принимает значения от 0 до K-1 и соответствует значениям ВКФ при задержках между сигналами tk:
- ВКФ между сигналами, принятыми на 1-ю и 2-ю антенну, k принимает значения от 0 до K-1 и соответствует значениям ВКФ при задержках между сигналами tk:
τ0=-Z⋅Δt, τ1=(-Z+1)⋅Δt, …, τZ=0, τZ+1=Δt, …, τK-1=(K-Z-1)⋅Δt,
где Δt - дискрет построения ВКФ, равный временному шагу оцифровки сигнала;
 - ВКФ между сигналами, принятыми 2-й и 3-й антеннами, k принимает значения от 0 до K-1;
- ВКФ между сигналами, принятыми 2-й и 3-й антеннами, k принимает значения от 0 до K-1;
Мгновенные ВКФ помещаются в магазин, позволяющий хранить ВКФ, построенные по М последним пакетам излучения и усредняются обыкновенным суммированием
 ,
,  ,
,
где  - значения ВКФ из магазина, вычисленной по пакету с номером i, между сигналами, принятыми на 1-ю и 2-ю антенну, k принимает значения от 0 до K-1 и соответствует значениям ВКФ при задержках между сигналами τk;
- значения ВКФ из магазина, вычисленной по пакету с номером i, между сигналами, принятыми на 1-ю и 2-ю антенну, k принимает значения от 0 до K-1 и соответствует значениям ВКФ при задержках между сигналами τk;
 - значения усредненной по М последним пакетам ВКФ между сигналами, принятыми на 1-ю и 2-ю антенну, к принимает значения от 0 до K-1;
- значения усредненной по М последним пакетам ВКФ между сигналами, принятыми на 1-ю и 2-ю антенну, к принимает значения от 0 до K-1;
 - значения ВКФ из магазина, вычисленной по пакету с номером i, между сигналами, принятыми на 2-ю и 3-ю антенну, k принимает значения от 0 до K-1;
- значения ВКФ из магазина, вычисленной по пакету с номером i, между сигналами, принятыми на 2-ю и 3-ю антенну, k принимает значения от 0 до K-1;
 - значения усредненной по М последним пакетам ВКФ между сигналами, принятыми на 2-ю и 3-ю антенну, к принимает значения от 0 до K-1.
- значения усредненной по М последним пакетам ВКФ между сигналами, принятыми на 2-ю и 3-ю антенну, к принимает значения от 0 до K-1.
Количество усреднений М устанавливается адаптивно к уровню ВКФ.
Для точного определения положения максимумов ВКФ производится аппроксимация ВКФ параболой методом наименьших квадратов с использованием треугольной весовой функции.
Уравнение параболы можно записать в виде Fpk=a⋅k2+b⋅k+c.
Параметры a, b и с определяются из системы уравнений
где а, b, с - искомые коэффициенты аппроксимирующей функции;
2М+1 - количество точек, по которым производится аппроксимация;
N - номер дискрета, на который приходится максимум ВКФ;
FN+j - значения усредненной ВКФ при задержках между сигналами τN+j;
wj=М-|j|+1 - треугольная весовая функция.
Использование треугольной весовой функции при аппроксимации обусловлено стремлением снизить влияние искажения формы боковых склонов на точность определения положения максимума ВКФ.
По известным параметрам параболы определяется положение ее вершины и, следовательно, максимума ВКФ (в относительных единицах)
 ,
,
где Nt - положение максимума ВКФ (в относительных единицах);
а, b - найденные коэффициенты аппроксимирующей функции.
Переход к транспортным задержкам в единицах времени осуществляется по формуле
 ,
,
где  - транспортная задержка между сигналами;
- транспортная задержка между сигналами;
Nt - положение максимума ВКФ (в относительных единицах);
Δt - дискрет построения ВКФ, равный временному шагу оцифровки сигнала.
Поскольку запись сигналов, принимаемых 1-й, 2-й и 3-й антеннами производится в одни и те же моменты времени (фиг. 2), то при определении транспортных задержек между сигналами отсутствует методическая ошибка.
Для уменьшения случайной составляющей погрешности перед вычислением проекций вектора скорости производится усреднение транспортных задержек между сигналами
 ,
,
где τ - мгновенная транспортная задержка в текущем пакете;
 - усредненная транспортная задержка, полученная в предыдущем пакете;
- усредненная транспортная задержка, полученная в предыдущем пакете;
 - усредненная транспортная задержка в текущем пакете;
- усредненная транспортная задержка в текущем пакете;
b - количество усреднений транспортных задержек.
Взаимное расположение излучающей и приемных антенн, дает формулы для вычисления составляющих вектора скорости [7]:
 ,
,
 ,
,
где Vx, Vz - продольная и поперечная составляющие вектора скорости в проекции на оси связанной системы координат;
τ1 - транспортная задержка между сигналами, принятыми на 1-ю и 2-ю антенны;
τ2 - транспортная задержка между сигналами, принятыми на 2-ю и 3-ю антенны;
Х0, Y0 - параметры антенной системы (фиг. 5).
После измерения высоты полета и составляющих вектора путевой скорости Vx и Vz цикл измерения вышеуказанных параметров повторяется периодически.
Использование изобретения позволяет повысить устойчивость и точность измерения составляющих вектора путевой скорости ЛА.
Литература
1. Авторское свидетельство СССР №1596934, кл. G01S 13/58. Опубл. 28.04.1988 г.
2. Лобач В.Т., Уваров С.Н., Боков Г.И. Корреляционный измеритель скорости полета и угла сноса. Авторское свидетельство СССР №1503527, кл. G01S 13/60. Опубл. 28.07.1987 г.
3. Патент РФ №2515524 от 28.05.2012 г., кл. G01S 13/60 «Импульсно-доплеровская радиовысотомерная система». Авт. Калмыков Н.Н., Соловьев В.В., Мельников С.А.
4. Справочник по радиолокации. Под редакцией Меррила И. Сколника Перевод с английского под общей редакцией B.C. Вербы. Книга 2. М.: Техносфера - 2014 г.
5. Карпов В.М., Малышев В.А., Перевощиков И.В. Широкополосные устройства СВЧ на элементах с сосредоточенными параметрами. М.: Радио и связь - 1984 г.
6. Модули СВЧ преобразовательные. Умножители частоты. М43108. бШ2.245.173ТУ.
7. Боркус М.К., Черный А.Е. Корреляционные измерители путевой скорости и угла сноса летательных аппаратов. М.: Сов. радио - 1973 г.
8. Патент РФ №2427060 от 11.01.2010 г., кл. H01Q 12/02 «Сверхширокополосная рупорная антенна». Авт. Коробейников Г.В., Кохнюк Д.Д., Григорьев А.Р.
9. Руденко В.М., Халяпин Д.Б., Магаушевский В.Р. Малошумящие входные цепи СВЧ приемных устройств. М.: Связь - 1971 г.
10. GaAs pHEMT MMIC low noise AGC amplifier NMC463LP5 / 463LP5E. Режим доступа: http://www.analog.com/media/en/technicaldocumentation/data-sheets/hmc4631p5.pdf.
11. GaAs MMIC double-balanced mixer NMC1048ALC3B. Режим доступа: http://www.analog.com/media/en/technicaldocumentation/datasheets/hmcl048a.pdf
Радиовысотомерная система с адаптацией к гладкой водной поверхности, содержащая синхронизатор, вычислительное устройство, первый, второй и третий аналого-цифровые преобразователи (АЦП), фазовращатель, передающую антенну, приемную антенную систему (АС), импульсный модулятор, управляемый аттенюатор, первый, второй и третий видеоусилители, буферное оперативное запоминающее устройство (БОЗУ), блок регулировки усиления, блок регулировки ослабления, источник тока, управляемый напряжением (УН), контроллер обмена, первый, второй и третий малошумящие усилители высокой частоты (УВЧ), дискретно управляемый сверхвысокочастотный (СВЧ) генератор, первый направленный ответвитель, первый, второй и третий фазовые детекторы, первые входы которых соединены соответственно с выходами первого, второго и третьего малошумящих УВЧ, входы которых соединены соответственно с выходами приемной АС, а второй вход импульсного модулятора соединен со вторым выходом синхронизатора, выход импульсного модулятора соединен со вторым входом фазовращателя, первый вход которого соединен с первым выходом синхронизатора, а выход - с первым входом управляемого аттенюатора, выход которого соединен с входом передающей антенны, а второй вход управляемого аттенюатора соединен с выходом источника тока УН, вход которого соединен с выходом блока регулировки ослабления, все первые входы которого соединены по шине данных со всеми первыми входами блока регулировки усиления, всеми шестыми входами/выходами БОЗУ, всеми первыми входами/выходами контроллера обмена, все третьи входы/выходы которого являются входами/выходами системы, а также всеми двенадцатыми входами/выходами вычислительного устройства, второй, третий, четвертый выходы которого соединены соответственно со вторыми входами блока регулировки ослабления, блока регулировки усиления, контроллера обмена, а пятый, шестой, седьмой, тринадцатый выходы -соответственно со вторым, третьим, четвертым, седьмым входами БОЗУ, восьмой, девятый выходы - соответственно со вторым и третьим входами синхронизатора, десятый, одиннадцатый выходы - соответственно со вторым и первым входами дискретно управляемого СВЧ генератора, выход которого соединен с входом первого направленного ответвителя, первый вход вычислительного устройства соединен с четвертым выходом синхронизатора, первый вход которого соединен с выходом БОЗУ, первый вход которого соединен с третьим выходом синхронизатора и вторыми входами первого, второго и третьего АЦП, все выходы которых соединены соответственно с пятыми, восьмыми и девятыми входами БОЗУ, а первые входы первого, второго и третьего АЦП - соответственно с выходами первого, второго и третьего видеоусилителей, первые входы которых соединены соответственно с выходами первого, второго и третьего фазовых детекторов, вторые входы - с выходом блока регулировки усиления, отличающаяся тем, что в нее введены первый, второй переключатели несущей частоты, умножитель частоты, второй и третий направленные ответвители, делитель мощности, при этом первый, второй и третий выходы делителя мощности соединены соответственно со вторыми входами первого, второго и третьего фазовых детекторов, а вход делителя мощности соединен с выходом второго переключателя несущей частоты, второй вход которого соединен со вторым выходом второго направленного ответвителя, первый выход которого соединен со вторым входом первого переключателя несущей частоты, выход которого соединен с первым входом импульсного модулятора, а первые входы первого и второго переключателей несущей частоты соединены соответственно с первым и вторым выходами третьего направленного ответвителя, вход которого соединен с выходом умножителя частоты, вход которого соединен со вторым выходом первого направленного ответвителя, первый выход которого соединен с входом второго направленного ответвителя, а четырнадцатый выход вычислительного устройства соединен с третьими входами первого и второго переключателей несущей частоты.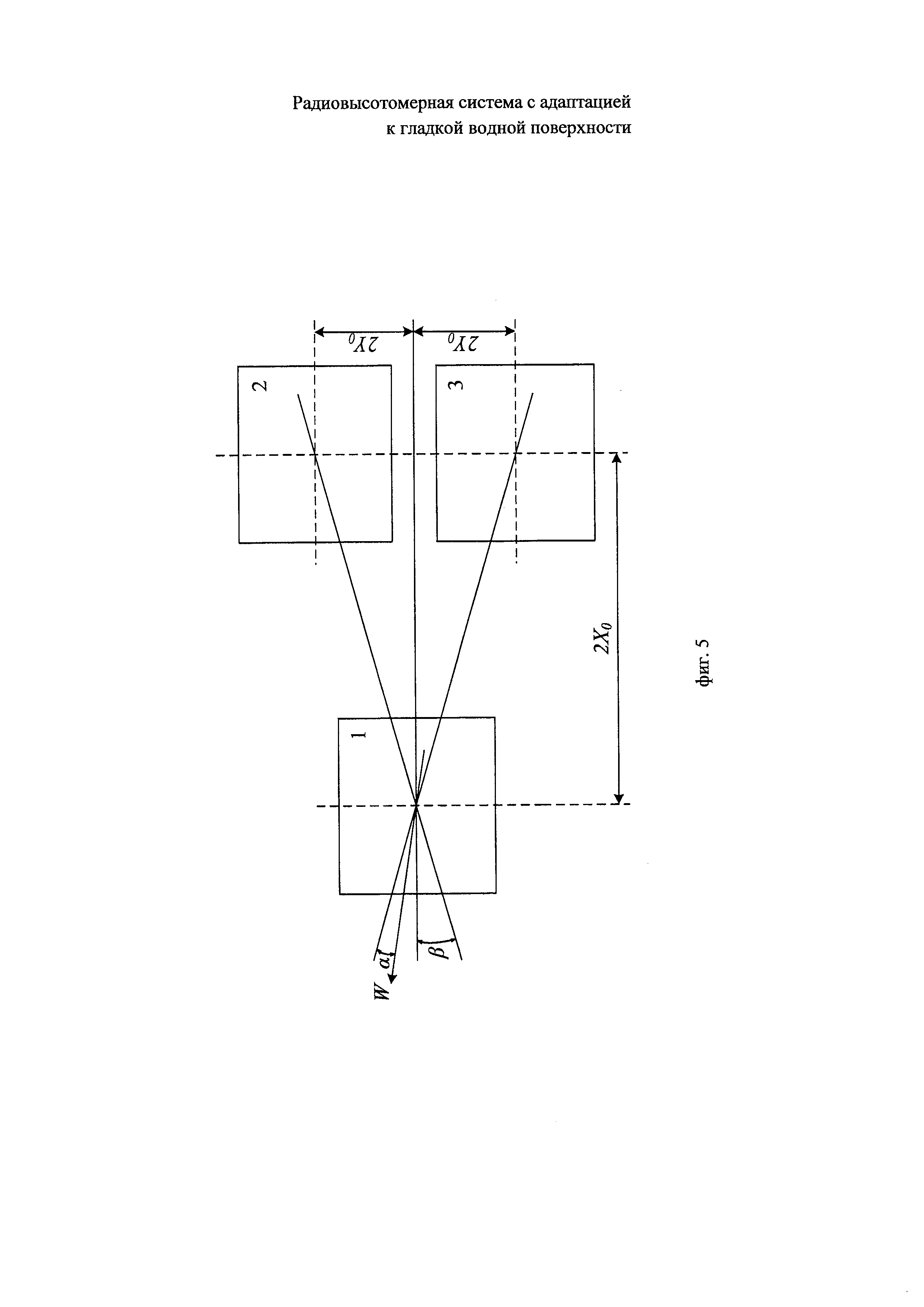
Устройство для имитации ложной радиолокационной цели при зондировании сигналами с линейной частотной модуляцией
Устройство дискретного преобразования фурье
Корреляционный измеритель высоты и составляющих вектора путевой скорости
Импульсно-доплеровская радиовысотомерная система
Импульсно-доплеровская радиовысотомерная система
Импульсно-доплеровский радиовысотомер
Приемопередающее устройство
Импульсно-фазовая радиовысотомерная система
Импульсно-доплеровский радиовысотомер
Приемопередающее устройство
Антенное устройство радиовысотомерной системы с повышенной точностью измерения поперечной составляющей скорости
Радиовысотомерная система с адаптацией к гладкой водной поверхности

