Результат интеллектуальной деятельности: УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО ТОРМОЗА
Вид РИД
Изобретение
Уровень техники
1. Область техники, к которой относится изобретение
[0001] Это изобретение относится к устройству электрического тормоза, включающему в себя электрический тормоз, предусмотренный для колеса.
2. Описание предшествующего уровня техники
[0002] В устройстве электрического тормоза, описанном в публикации японской патентной заявки № 2003-194119, после того как заданный период времени проходит, после того как электрический тормоз отпускается, и когда электрический тормоз находится в недействующем состоянии, вал перемещается вперед из своей самой задней позиции, и получается ход вала до тех пор пока внутренний фрикционный элемент и внешний фрикционный элемент не придут в контакт с дисковым ротором, и этот ход сохраняется как позиция начала торможения. Таким образом, поскольку позиция начала торможения получается в состоянии, в котором фрикционные элементы охлаждаются, представляется возможным делать задержку момента формирования тормозного усилия меньшей. Кроме того, после того как позиция начала торможения получена, вал может быть перемещен назад на предварительно определенный интервал; следовательно, представляется возможным предпочтительно пресекать прихватывание тормоза.
Сущность изобретения
[0003] Это описание изобретения предоставляет электрический тормоз, пресекающий колебания, которые должны создаваться.
[0004] Первый аспект этого изобретения относится к устройству электрического тормоза. Устройство электрического тормоза включает в себя электрический тормоз, выполненный так, что вал перемещается вперед посредством приведения в действие электродвигателя, и перемещение вала вперед приводит электрический тормоз в действующее состояние, в котором фрикционные элементы тормоза прижимаются к вращающейся части тормоза с тем, чтобы подавлять вращение колеса; и контроллер двигателя, выполненный с возможностью управления электродвигателем, при этом посредством управления скоростью вращения электродвигателя, после того как вал достигает заданной позиции, прежде чем электрический тормоз приходит в действующее состояние, контроллер двигателя управляет скоростью движения вперед вала, чтобы она была меньше скорости, до того как вал достигает заданной позиции.
[0005] В вышеприведенном аспекте, может быть выполнено так, что посредством вышеописанного управления электродвигателем контроллер двигателя управляет скоростью движения вперед вала, чтобы она становилась первой скоростью, до того как вал достигает заданной позиции, и контроллер двигателя управляет его скоростью движения вперед, чтобы скорость становилась второй скоростью, меньшей, чем первая скорость, после того как вал достигает заданной позиции. Вал линейно перемещается вместе с вращением электродвигателя, и скорость вращения электродвигателя и скорость движения вперед вала уникально соответствуют друг другу. В устройстве электрического тормоза, описанном в данном документе, соответствующие скорости движения вперед вала, перед и после того как вал достигает заданной позиции, устанавливаются постоянными. С другой стороны, соответствующие скорости движения вперед вала, перед и после того как вал достигает заданной позиции, могут также быть установлены переменными.
[0006] В вышеприведенном аспекте, до того как вал достигает заданной позиции, контроллер двигателя может управлять скоростью вращения электродвигателя, чтобы она была максимальной скоростью вращения, которая может быть выведена посредством электродвигателя.
[0007] В вышеприведенном аспекте контроллер двигателя может управлять скоростью вращения электродвигателя, так что скорость движения вперед вала становится второй скоростью, после того как вал достигает заданной позиции до тех пор, пока электродвигатель не придет в действующее состояние.
Вторая скорость может быть задана в степень, которая может подавлять время первоначальной реакции, а также пресекает колебания, формируемые, когда электрический тормоз приходит в действующее состояние, или т.п. Например, вторая скорость может быть скоростью 50% или более, 60% или более, 70% или более, 90% или менее, 80% или менее, 70% или менее, или 60% или менее первой скорости. Дополнительно, вторая скорость может быть скоростью, при которой период времени от вывода инструкции срабатывания тормоза до тех пор, когда электрический тормоз приходит в действующее состояние, становится заданным периодом времени или менее, или вышеописанный период времени может быть 200% или менее, 150% или менее или 130% или менее периода времени в случае, в котором уменьшение скорости не выполняется, или т.п.
[0008] В вышеописанном аспекте контроллер двигателя может управлять электродвигателем так, что, когда электрический тормоз приходит в действующее состояние, осевое усилие, прикладываемое к валу, приводится к приблизительно целевому осевому усилию, определенному на основе условий работы элемента приведения в действие тормоза, задействуемого водителем. Целевое осевое усилие определяется на основе условий работы тормоза, задействуемого водителем, и может также быть значением, определенным с учетом рекуперативного тормозного усилия, когда выполняется рекуперативное совместное управление. В блоке управления осевым усилием, управление с обратной связью может выполняться так, что значение измерения осевого усилия приводится к приблизительно целевому осевому усилию.
[0009] В вышеописанном аспекте заданная позиция может быть определена как позиция, определенная на основе значения измерения зазора между фрикционным элементом тормоза и передней торцевой поверхностью вала, когда вал находится в самой задней позиции. Заданная позиция может быть определена как позиция, определенная на основе нижнего предельного значения изменения зазора, например.
[0010] В вышеописанном аспекте вращающаяся часть тормоза может быть дисковым ротором, как единое целое и с возможностью вращения прикрепленным к колесу, электрический тормоз может быть дисковым тормозом, который включает в себя пару фрикционных элементов тормоза, расположенных по обеим сторонам дискового ротора, приходит в действующее состояние, в котором пара фрикционных элементов тормоза прижимаются к дисковому ротору, контроллер двигателя может сохранять позицию контакта, которая является позицией, где вал приходит в контакт с дисковым ротором через один из пары фрикционных элементов тормоза, и контроллер двигателя может определять, в качестве заданной позиции, позицию, расположенную дальше назад с расстоянием, не меньшим, чем расстояние, определенное на основе стандартного значения кривизны поверхности дискового ротора, чем позиция контакта, сохраненная во время предыдущего действия электрического тормоза. В дисковом тормозе, вследствие перемещения вперед вала, вал приходит в контакт с одной из пары фрикционных элементов тормоза, и зазор не присутствует между фрикционным элементом тормоза и дисковым ротором, так что фрикционный элемент тормоза приходит в контакт с дисковым ротором. Это состояние является состоянием, в котором вал приходит в контакт с дисковым ротором через фрикционный элемент тормоза. Дальнейшее перемещение вперед вала перемещает суппорт, так что другой фрикционный элемент тормоза толкается вплотную к дисковому ротору; таким образом, пара фрикционных элементов тормоза прижимаются к дисковому ротору посредством вала и суппорта. Это состояние является действующим состоянием электрического тормоза. В устройстве электрического тормоза, описанном в данном документе, заданная позиция определяется как позиция, до того как вал приходит в контакт с дисковым ротором через один из пары фрикционных элементов тормоза. В результате, скорость движения вперед вала уменьшается, до того как вал приходит в контакт с дисковым ротором через один из фрикционных элементов тормоза; следовательно, когда вал приходит в контакт с дисковым ротором через один из фрикционных элементов тормоза, также представляется возможным пресекать колебания, формируемые, когда электрический тормоз приходит в действующее состояние.
[0011] В вышеописанном аспекте устройство электрического тормоза может включать в себя: редуктор скорости, который уменьшает вращение электродвигателя; и механизм преобразования движения, который преобразует вращение выходного вала редуктора скорости в линейное перемещение и выдает линейное перемещение валу.
[0012] В вышеописанном аспекте устройство электрического тормоза может включать в себя: датчик хода, определяющий ход вала; и осевой датчик, определяющий осевое усилие, прикладываемое к валу.
[0013] Второй аспект этого изобретения направлен на устройство электрического тормоза. Устройство электрического тормоза включает в себя: электрический тормоз, выполненный с возможностью приведения в действие посредством приведения в действие электродвигателя и прижатия фрикционных элементов тормоза к вращающейся части тормоза с помощью вала с тем, чтобы сдерживать вращение колеса; и контроллер двигателя, выполненный с возможностью управления электродвигателем, при этом посредством управления скоростью вращения электродвигателя контроллер двигателя управляет скоростью движения вперед вала, чтобы она была не больше предварительно определенной заданной скорости, после того как вал достигает заданной позиции, до того как вал приходит в контакт с вращающейся частью тормоза через фрикционные элементы тормоза. Заданная скорость может быть в степени, которая может пресекать колебания и уменьшать время первоначальной реакции. Заданная скорость может быть не меньше второй скорости и меньше первой скорости.
[0014] Третий аспект этого изобретения направлен на устройство электрического тормоза. Устройство электрического тормоза включает в себя: электрический тормоз, выполненный с возможностью приведения в действие посредством приведения в действие электродвигателя и прижатия фрикционных элементов тормоза к вращающейся части тормоза с помощью вала, так, чтобы сдерживать вращение колеса; и контроллер двигателя, выполненный с возможностью управления электродвигателем, при этом посредством управления скоростью вращения электродвигателя контроллер двигателя управляет скоростью движения вперед вала, чтобы она была меньше его скорости движения вперед, до того как вал достигает заданной позиции, после того как вал достигает заданной позиции, до того как вал приходит в контакт с вращающейся частью тормоза через фрикционные элементы тормоза. В этом устройстве электрического тормоза скорость движения вперед вала уменьшается, до того как вал приходит в контакт с вращающейся частью тормоза через фрикционные элементы тормоза. В результате, представляется возможным пресекать колебания, формируемые, когда вал приходит в контакт с вращающейся частью тормоза через фрикционные элементы тормоза или т.п.
[0015] В вышеописанном аспекте скорость движения вперед вала электрического тормоза уменьшается, прежде чем электрический тормоз приходит в действующее состояние. В результате, представляется возможным пресекать колебания, формируемые во время применения тормоза. Кроме того, если скорость движения вперед вала уменьшается, до того как вал приходит в контакт с вращающейся частью тормоза через фрикционные элементы тормоза, также представляется возможным пресекать колебания, формируемые, когда вал приходит в контакт с вращающейся частью тормоза через фрикционные элементы тормоза.
Краткое описание чертежей
[0016] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
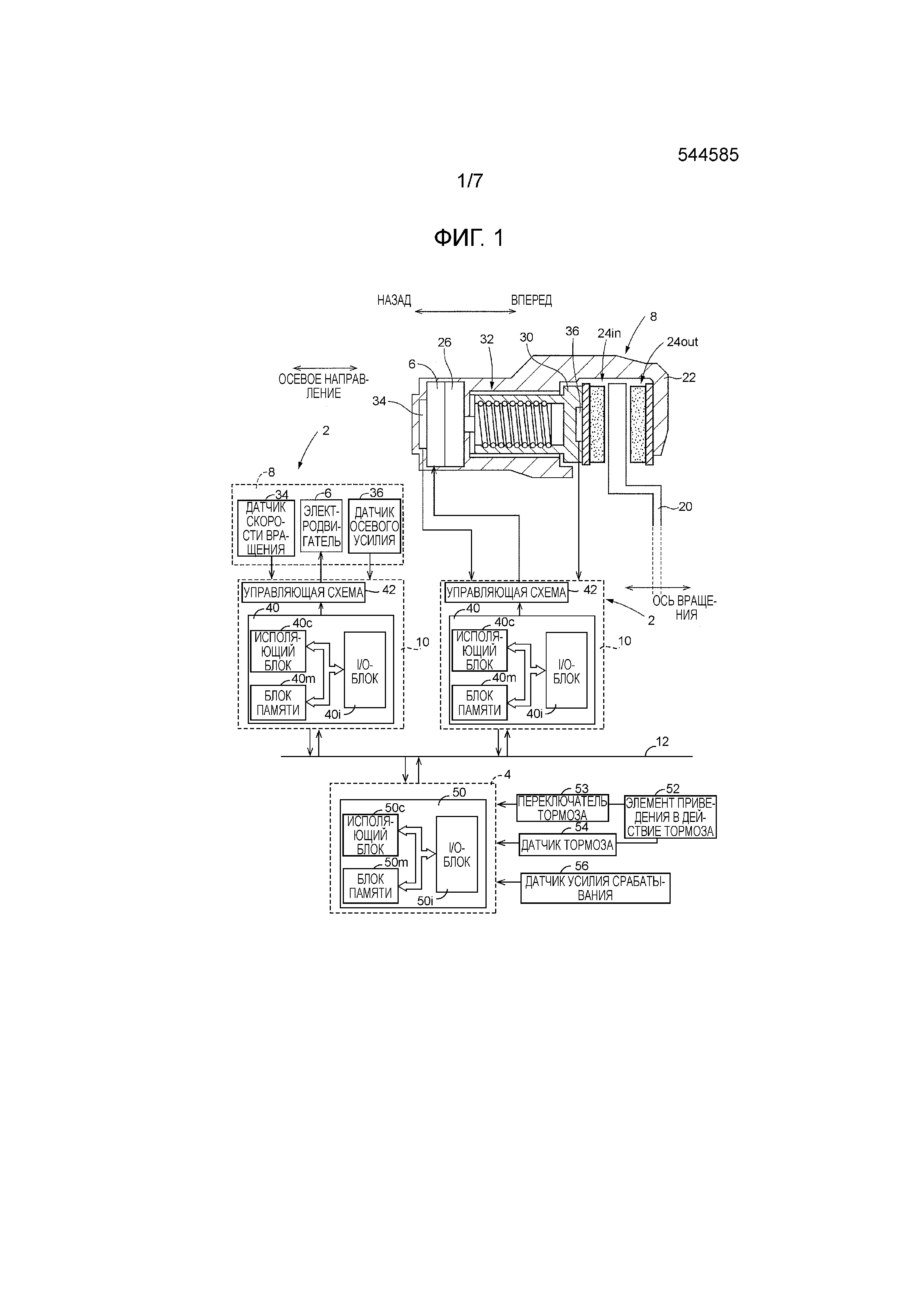
Фиг. 1 - это концептуальный вид тормозной системы, включающей в себя устройства электрического тормоза согласно этому изобретению;
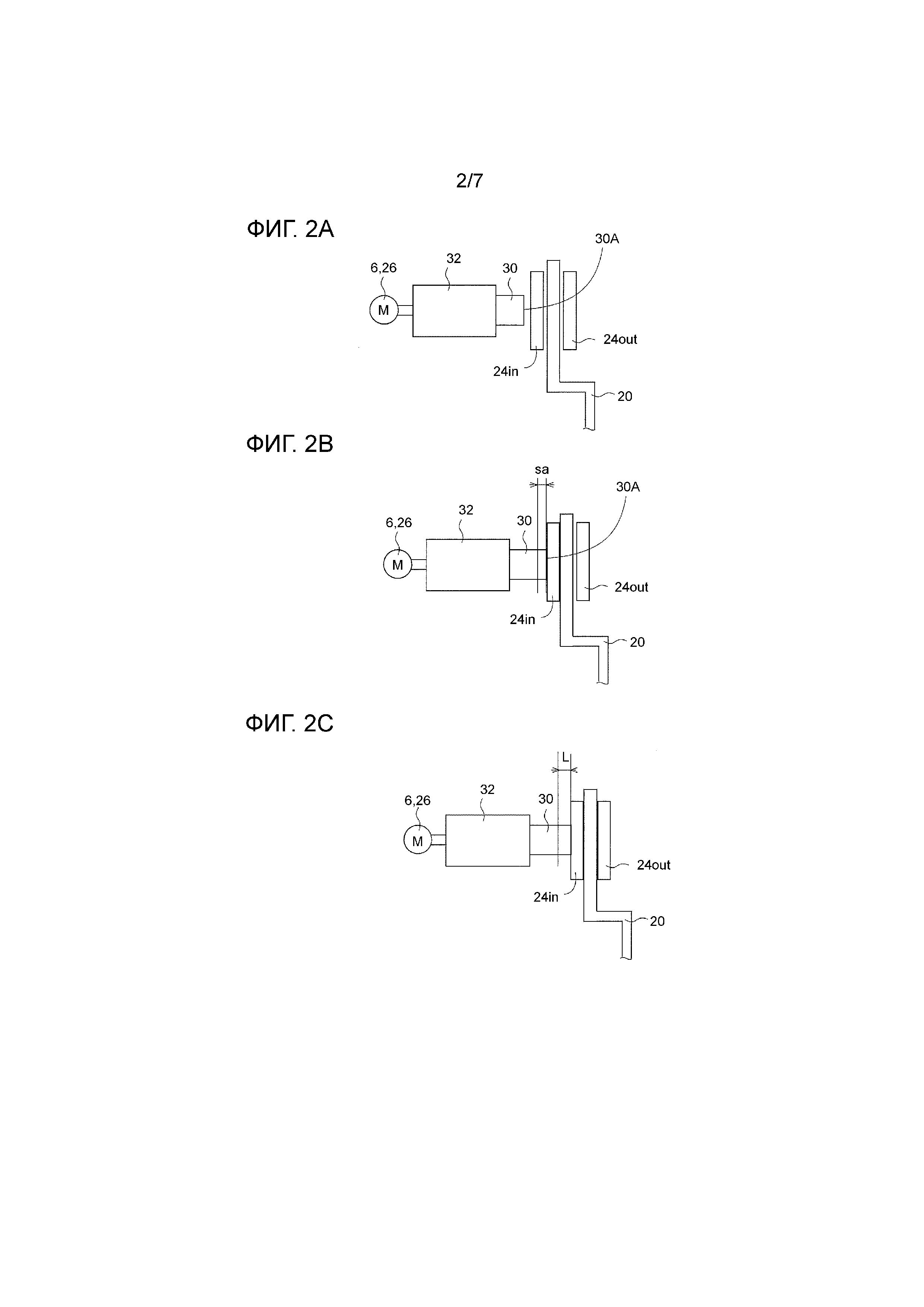
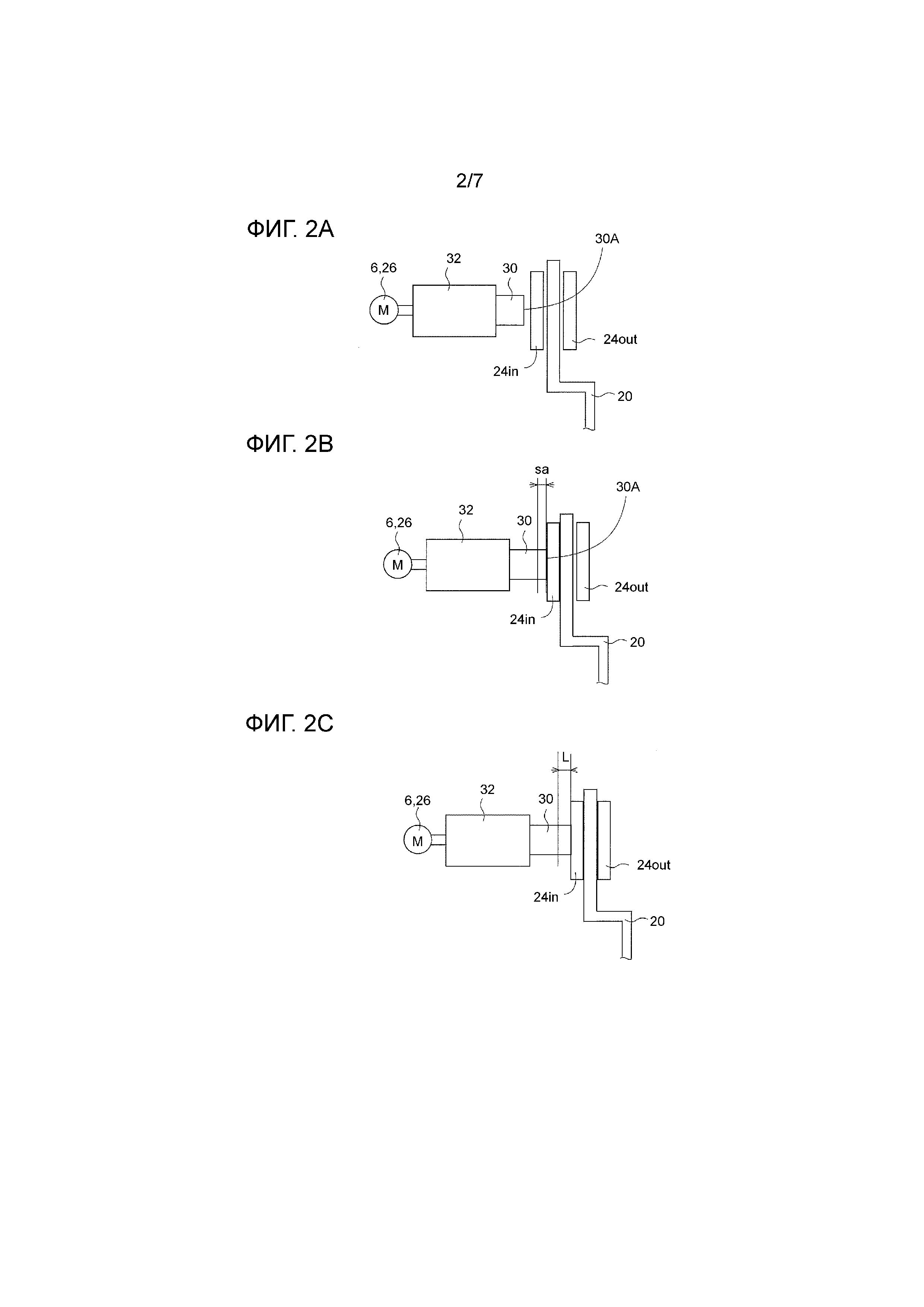
Фиг. 2A - это вид, показывающий работу электрического тормоза устройства электрического тормоза, и вид, показывающий электрический тормоз в недействующем состоянии;
Фиг. 2B - это вид, показывающий работу устройства электрического тормоза, и вид, показывающий состояние, в котором вал находится в контакт с ротором через фрикционный элемент;
Фиг. 2C - это вид, показывающий работу электрического тормоза устройства электрического тормоза, и вид, показывающий состояние, в котором пара фрикционных элементов прижимаются к ротору;
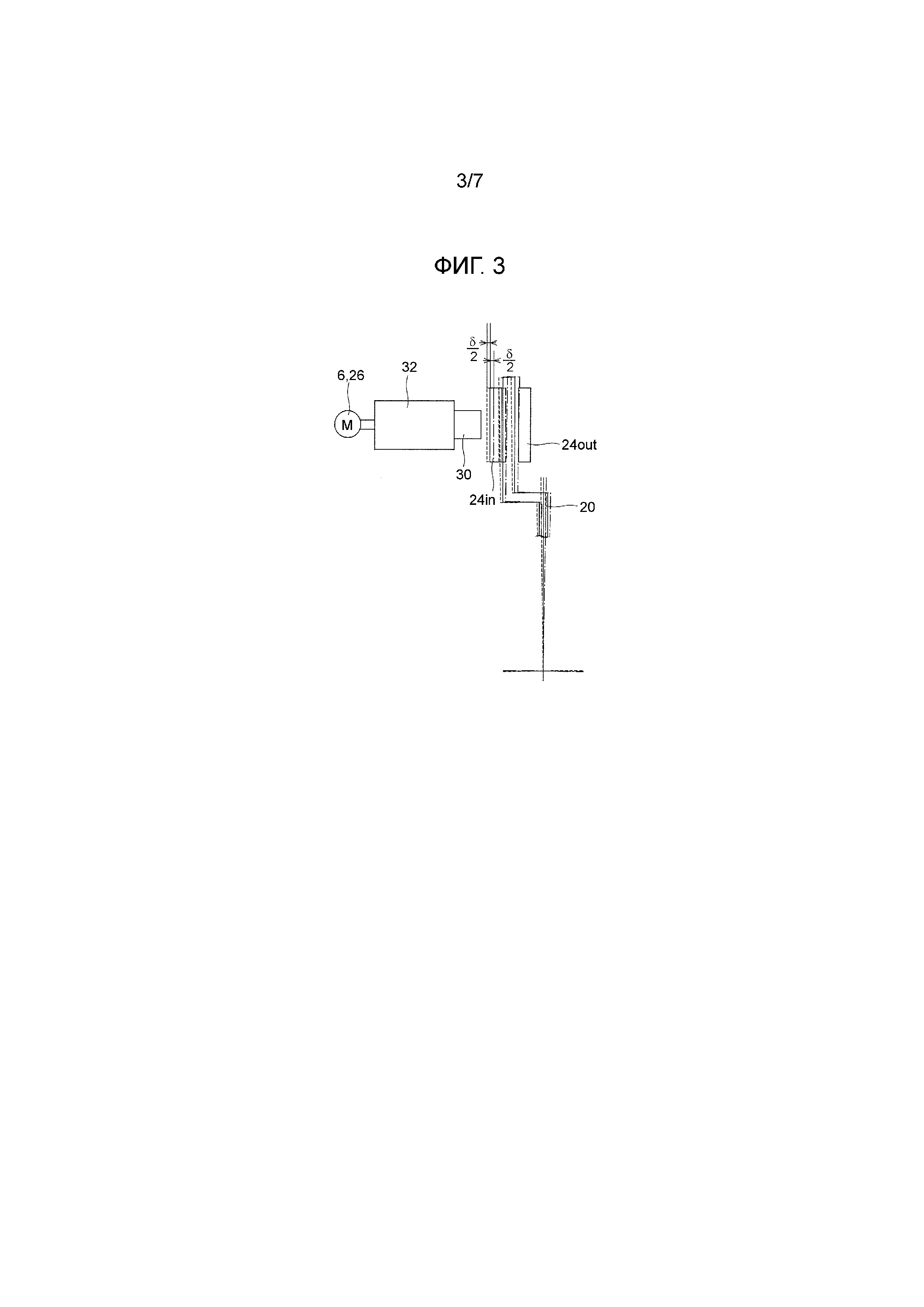
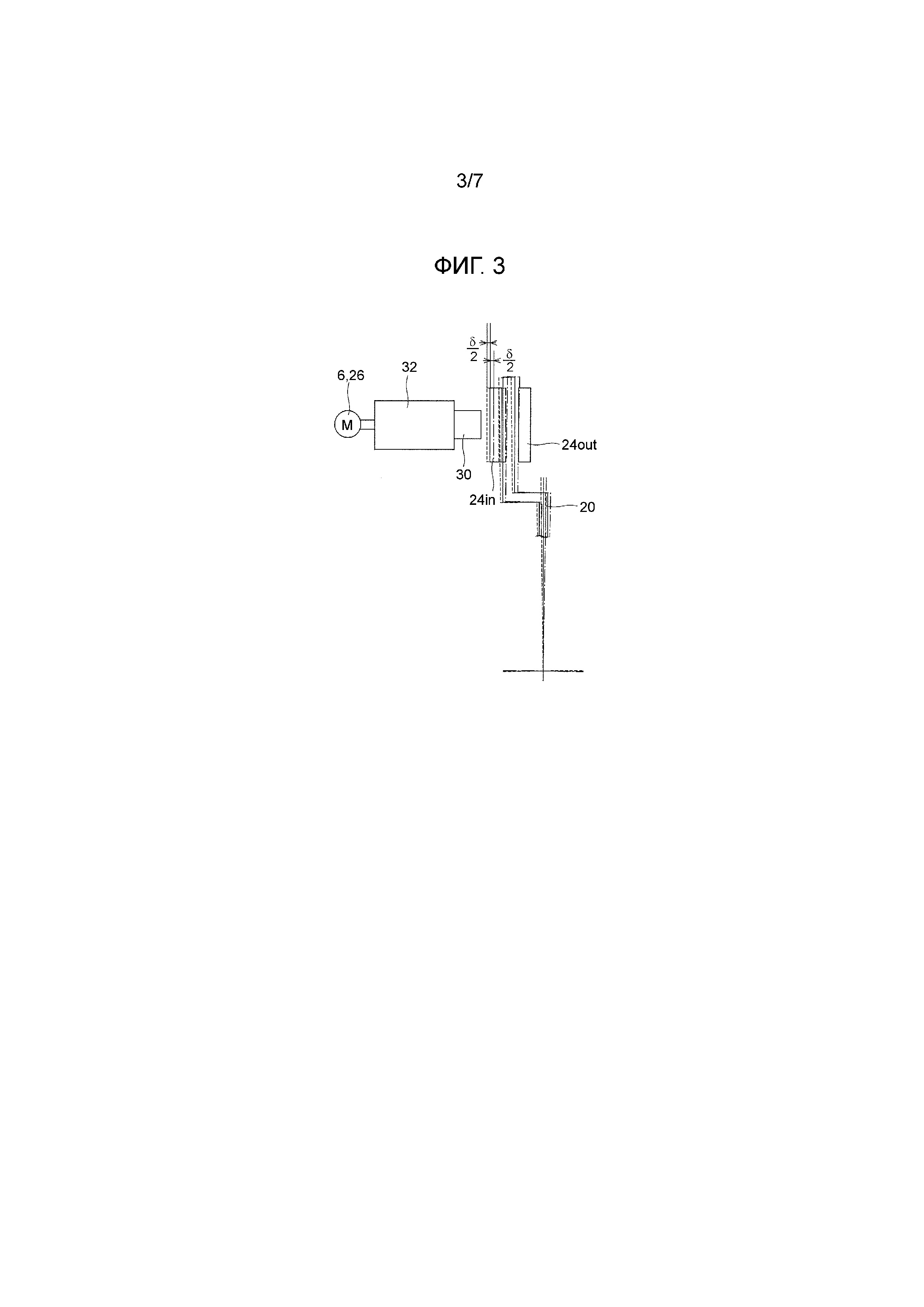
Фиг. 3 - это вид, показывающий кривизну поверхности ротора электрического тормоза;
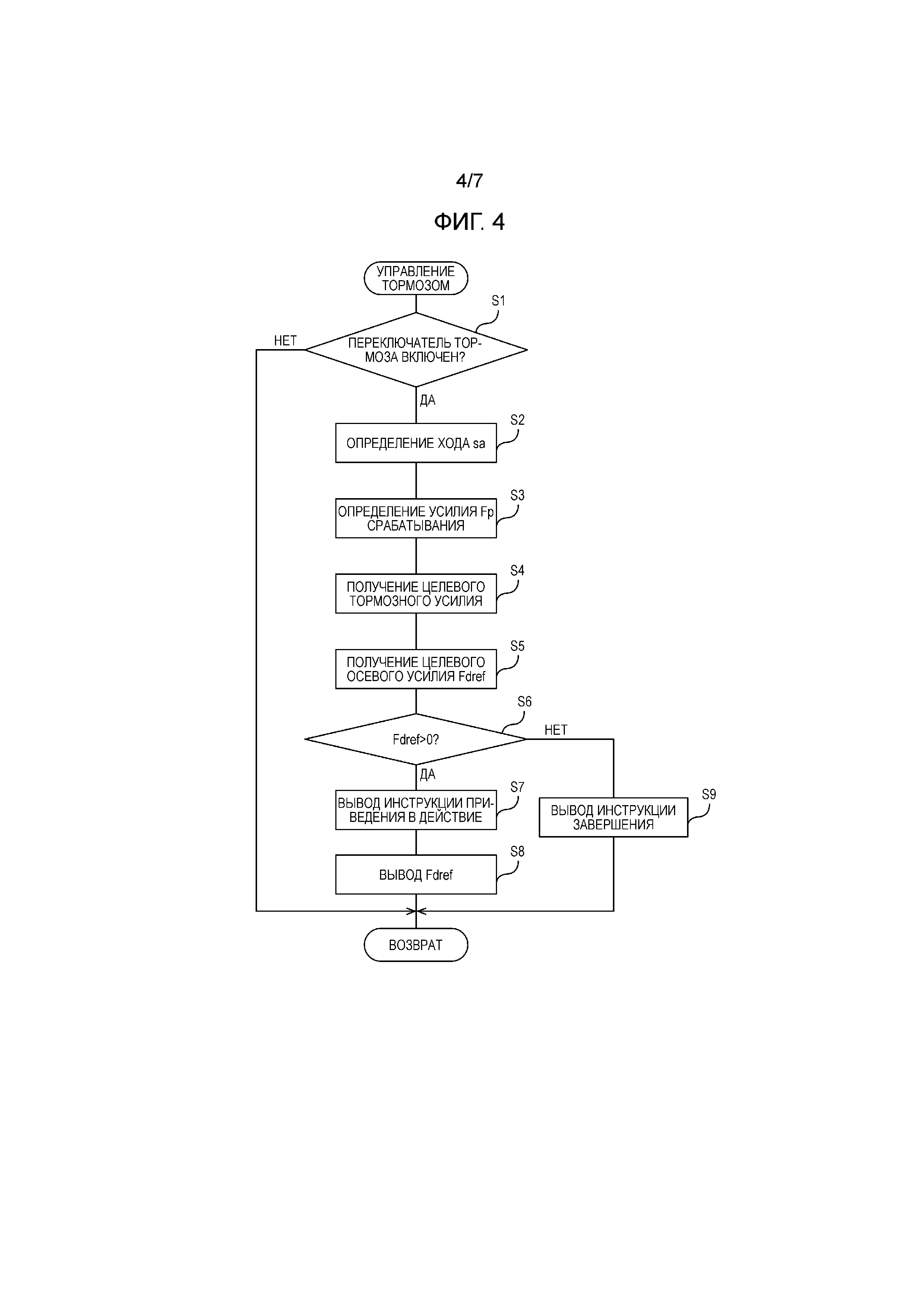
Фиг. 4 - это блок-схема последовательности операций, показывающая программу управления тормозом, сохраненную в блоке памяти ECU тормоза, включенного в тормозную систему;
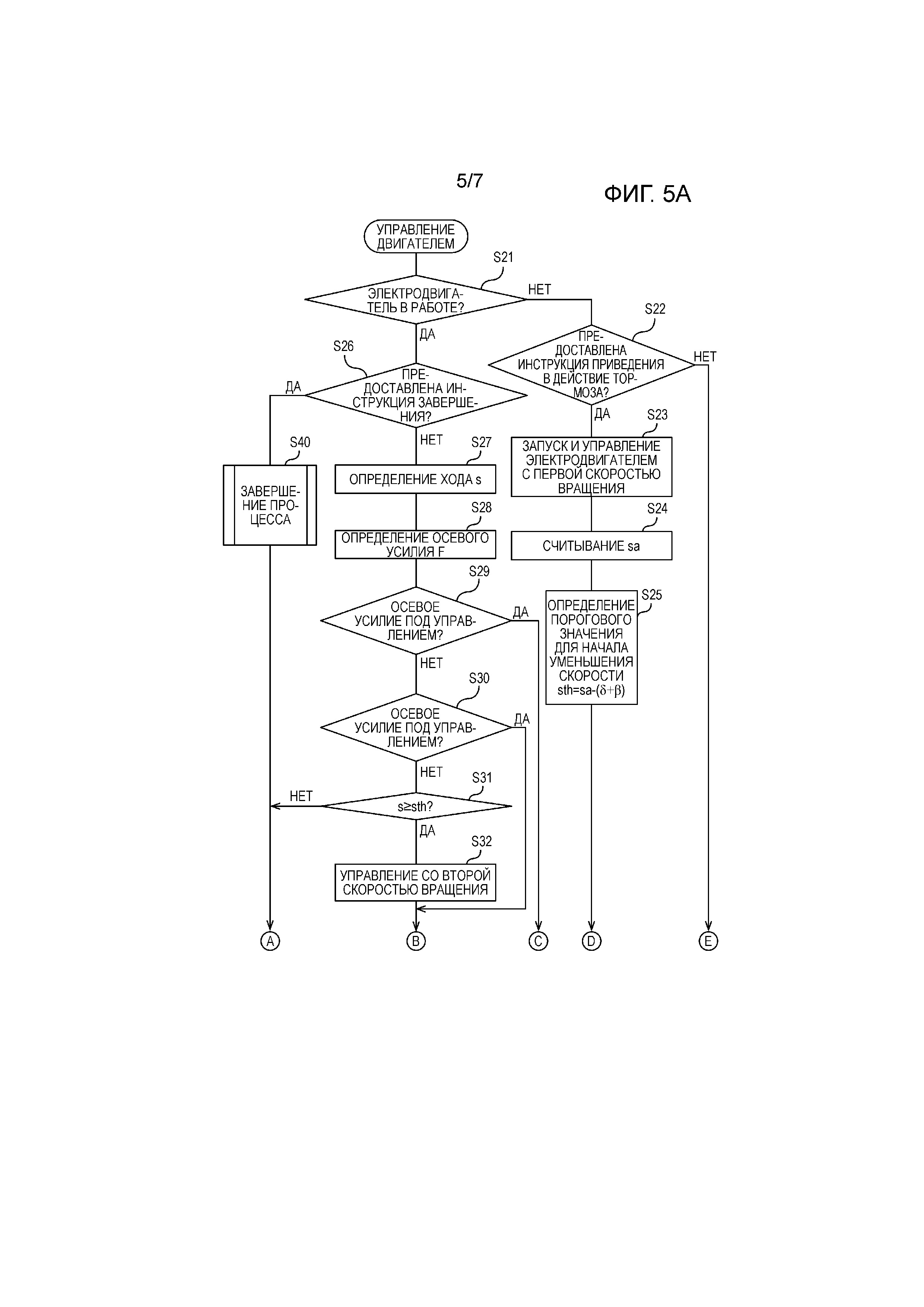
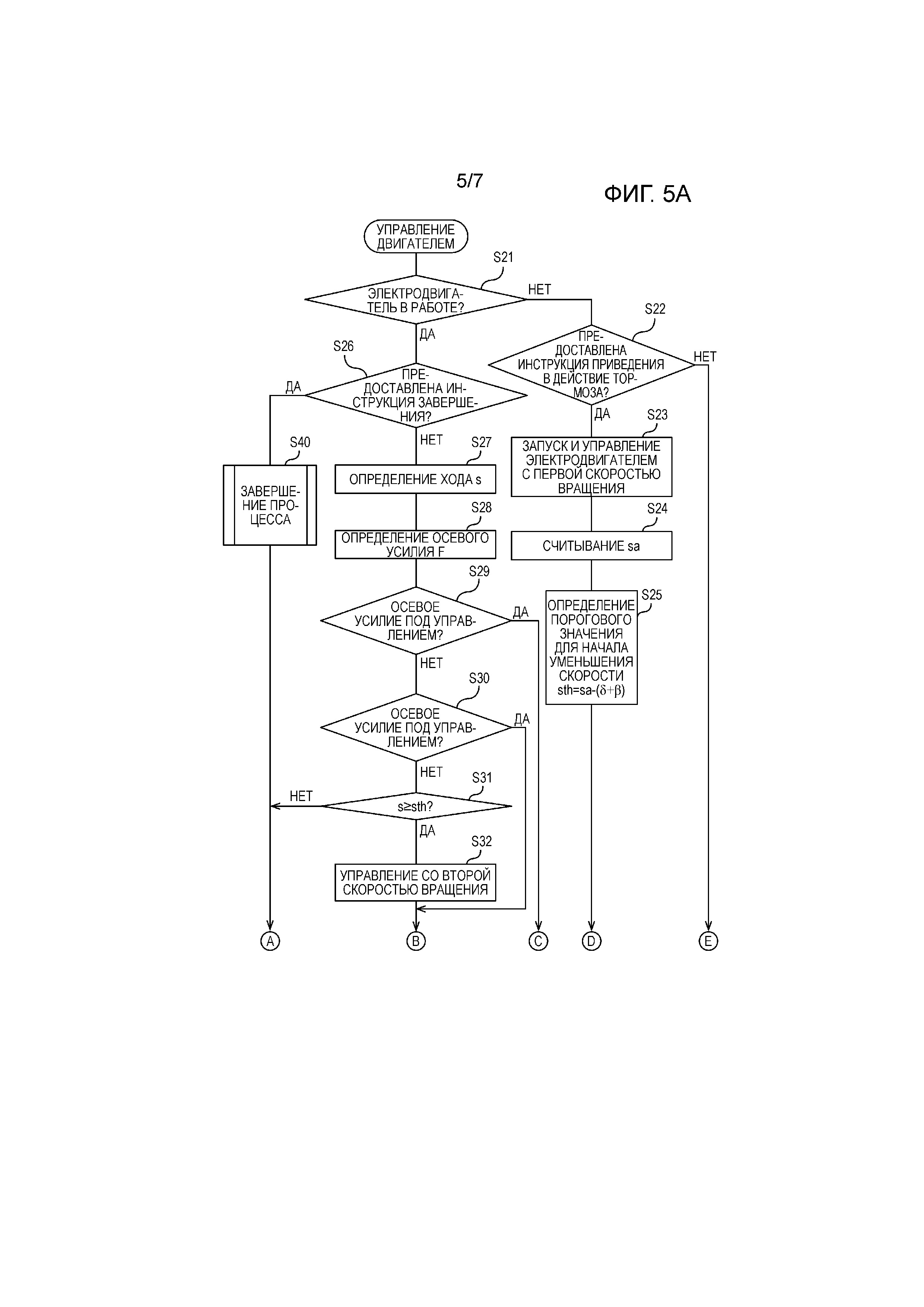
Фиг. 5A - это блок-схема последовательности операций, указывающая программу управления двигателем, сохраненную в блоке памяти ECU двигателя;
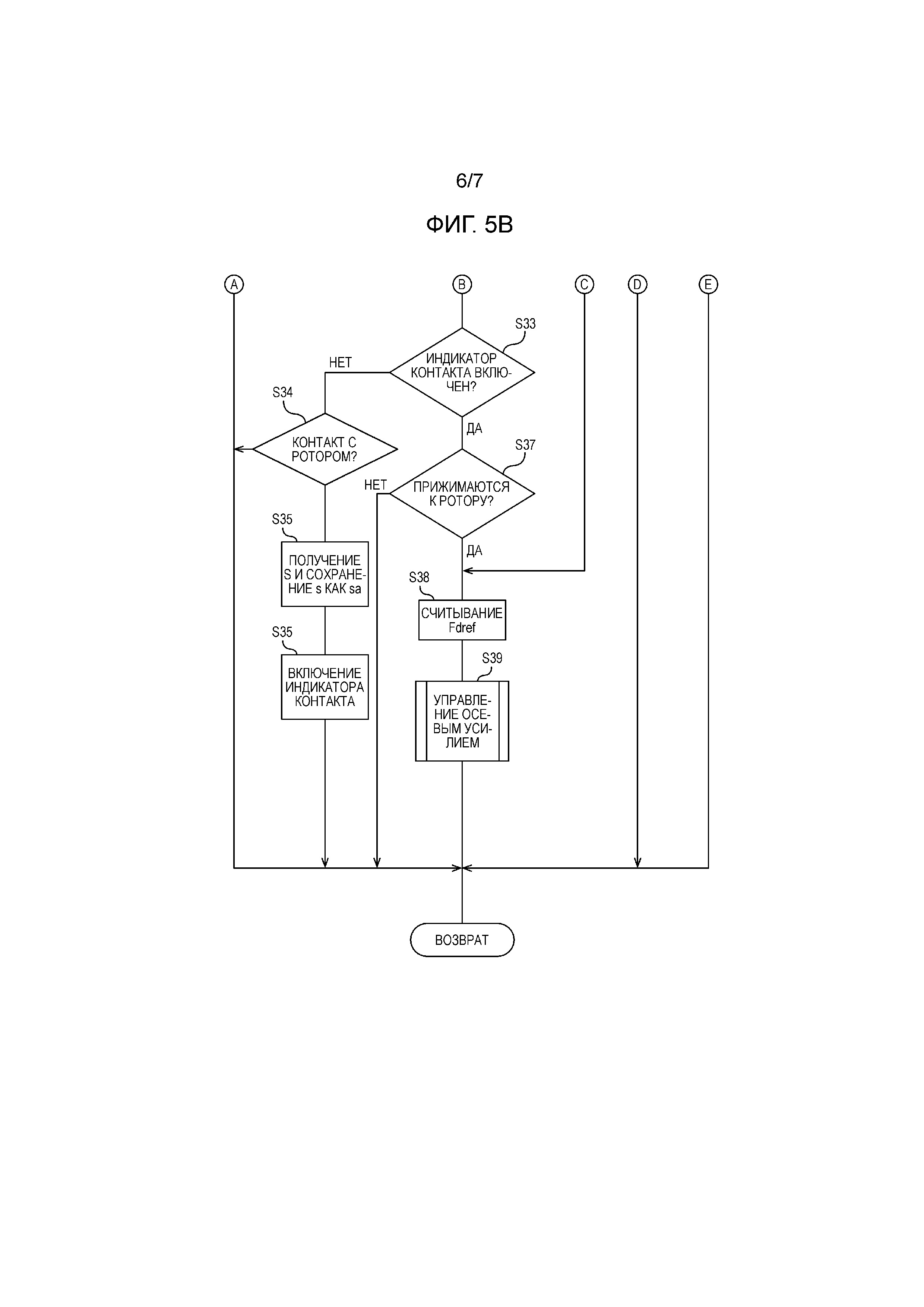
Фиг. 5B - это блок-схема последовательности операций, указывающая программу управления двигателем, сохраненную в блоке памяти ECU двигателя;
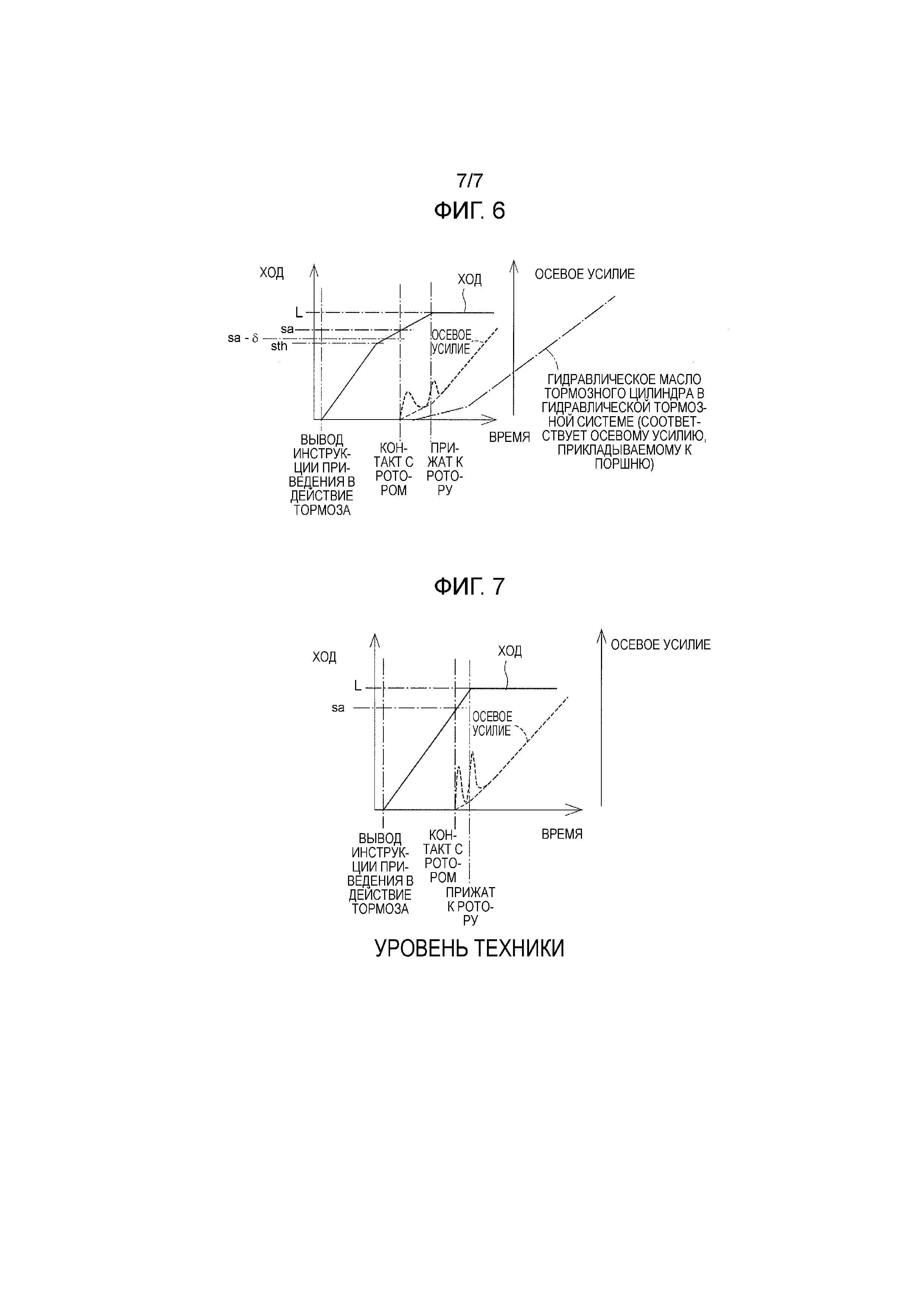
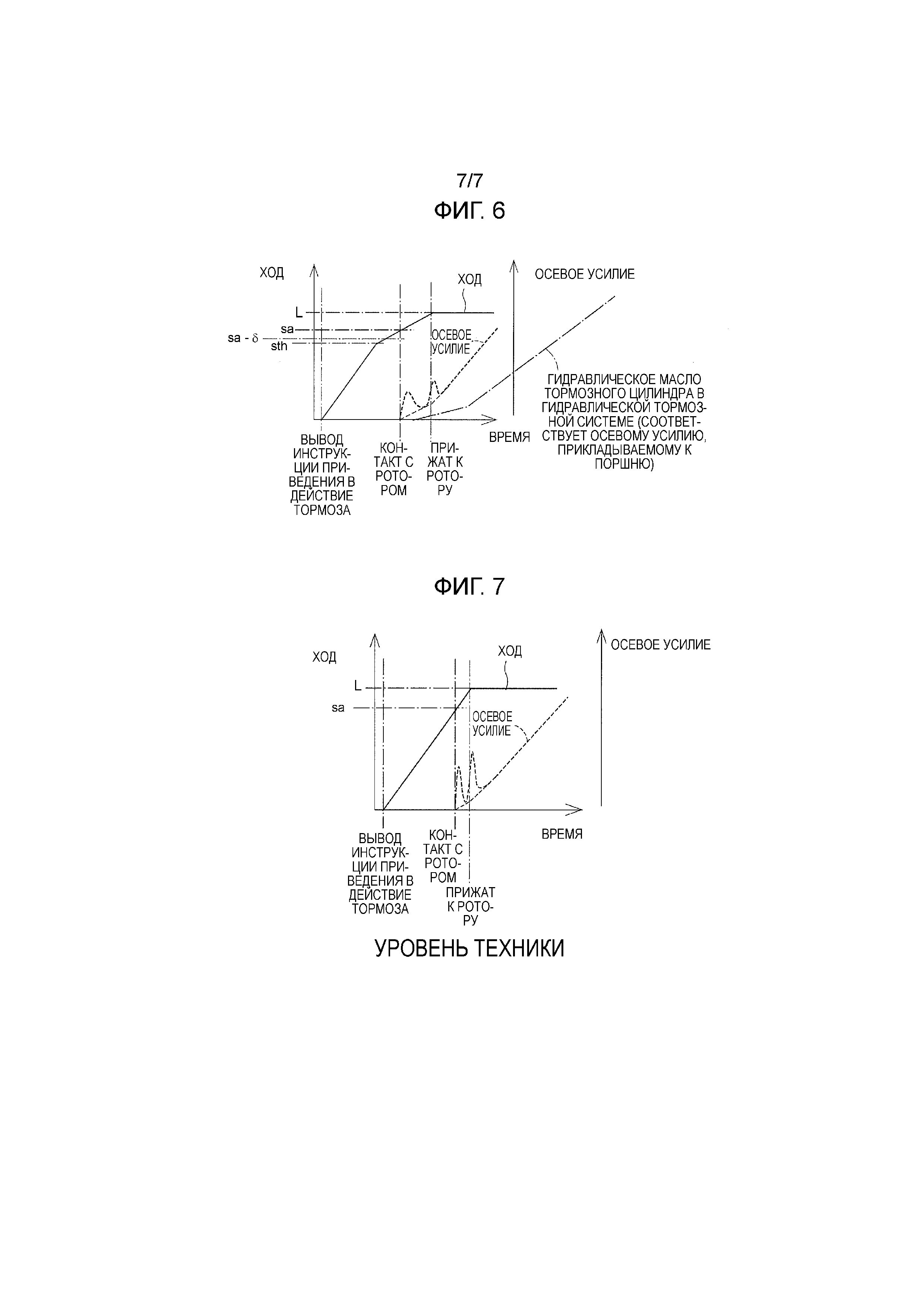
Фиг. 6 - это вид, показывающий изменения хода и осевого усилия электрического тормоза; и
Фиг. 7 - это вид, показывающий изменения хода и осевого усилия электрического тормоза устройства электрического тормоза, к которому это изобретение не применяется.
Подробное описание вариантов осуществления
[0017] Далее в данном документе тормозная система, включающая в себя устройства электрического тормоза согласно одному варианту осуществления этого изобретения, будет описана со ссылкой на чертежи.
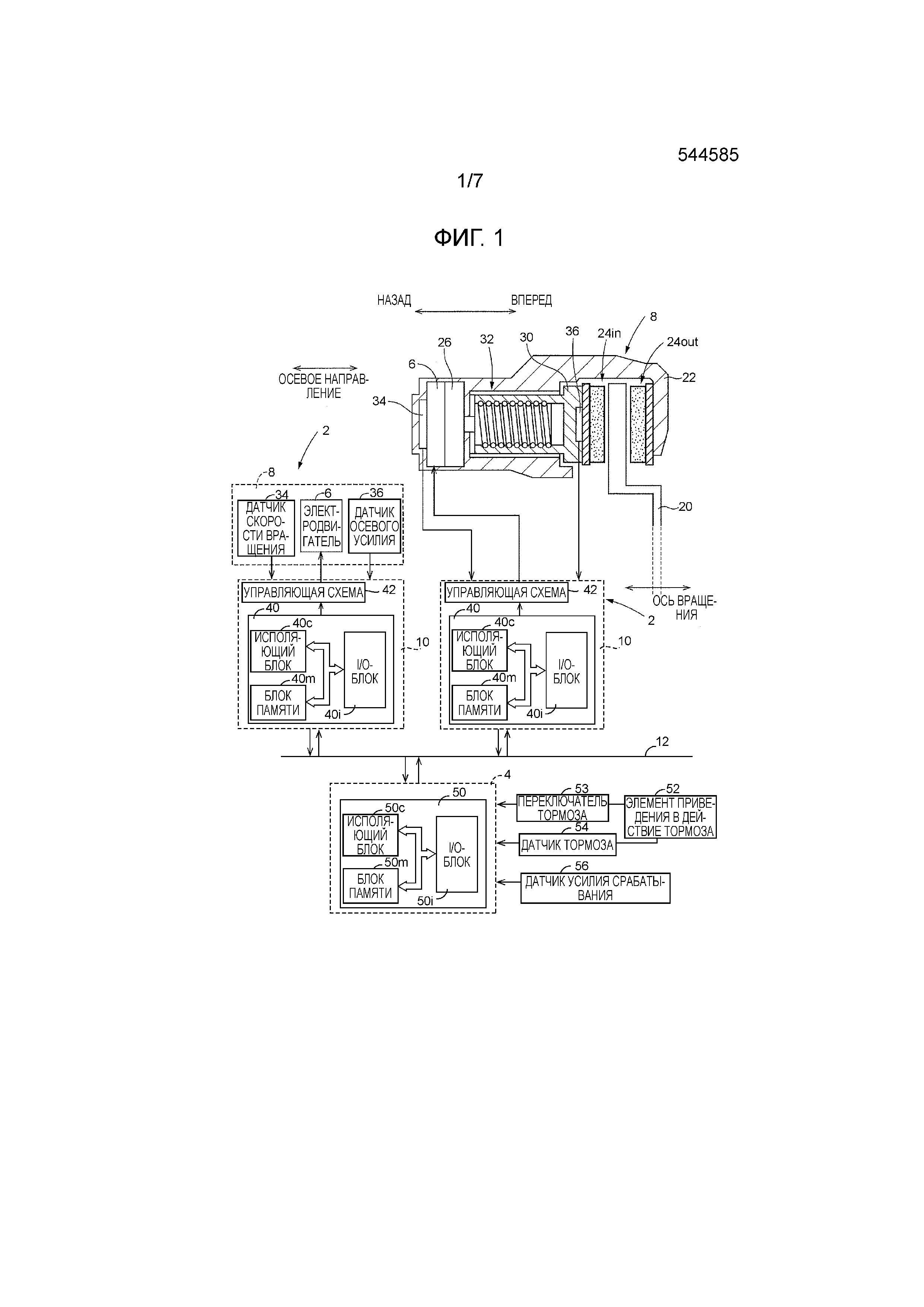
[0018] Как показано на фиг. 1, эта тормозная система включает в себя множество устройств 2 электрического тормоза, которые соответственно предусматриваются для двух или более из множества колес, включенных в транспортное средство, и ECU 4 тормоза. Каждое из устройств 2 электрического тормоза оснащается электродвигателем 6 и включает в себя электрический тормоз 8, сдерживающий вращение колеса посредством привода электродвигателя 6, и ECU 10 двигателя, управляющий электродвигателем 6. ECU 10 двигателя и ECU 4 тормоза соединяются друг с другом через CAN (локальную сеть контроллеров) 12 с тем, чтобы, иметь возможность связи друг с другом.
[0019] Как показано на фиг. 1, электрический тормоз 8 является дисковым тормозом и включает в себя: (1) суппорт 22, который располагается в положении протяжения через дисковый ротор (далее в данном документе называемый кратко ротором) 20 в качестве вращающейся части тормоза, целиком вращаемого с колесом, и прикрепляется к неиллюстрированной невращающейся основной части кузова транспортного средства в направлении, параллельном оси вращения (далее в данном документе называемом осевым направлением) колеса; (2) пара фрикционных элементов 24in, 24out тормоза, которые удерживаются относительно невращающейся основной части таким образом, чтобы иметь возможность перемещения в осевом направлении, и соответственно располагаются на внутренней стороне и внешней стороне ротора 20; (3) электродвигатель 6 и редуктор 26 скорости, который уменьшает вращение электродвигателя 6 и выдает это вращение, электродвигатель 6 и редуктор 26 скорости удерживаются внутри суппорта 22; (4) вал 30 удерживается относительно суппорта 22 таким образом, чтобы прикрепляться с возможностью вращения к суппорту 22 и иметь возможность перемещения в осевом направлении; и (5) механизм 32 преобразования движения, включающий в себя винтовой механизм, который преобразует вращение выходного вала редуктора 26 скорости в линейное перемещение и выдает это перемещение валу 30, и другое. Каждый из фрикционных элементов 24in, 24out тормоза (далее в данном документе называемых кратко фрикционными элементами) включает в себя колодку и опорную пластину.
[0020] Электрический тормоз 8 включает в себя датчик 34 скорости вращения, определяющий скорость вращения электродвигателя 6, датчик 36 осевого усилия, измеряющий осевое усилие, которое является усилием в осевом направлении, которое действует на вал 30, и другое. В этом варианте осуществления датчик 36 осевого усилия предусматривается для переднего конца (фрагмента, контактируемого с фрикционным элементом 24in) вала 30, но не всегда необходимо предусматривать датчик 36 осевого усилия для переднего конца вала 30. Скорость перемещения вала 30 получается на основе скорости вращения электродвигателя 6, определенной посредством датчика 34 скорости вращения, и прочего, а расстояние перемещения вала 30 получается посредством интегрирования скорости перемещения вала 30. В этом варианте осуществления расстояние перемещения из предварительно определенной самой задней позиции вала 30 называется ходом. Позиция или ход вала 30 может быть представлен ходом или позицией передней торцевой поверхности 30A вала 30 со ссылкой на переднюю торцевую поверхность 30A в качестве предварительно определенного фрагмента вала 30. Кроме того, позиция вала 30 может быть представлена посредством хода передней торцевой поверхности 30A вала 30, т.е., расстояния от самой задней позиции передней торцевой поверхности 30A вала 30.
[0021] ECU 10 двигателя включает в себя контроллер 40, главным образом, состоящий из компьютера, и контроллер 40 включает в себя исполняющий блок 40c, блок 40m памяти и блок 40i I/O (ввода/вывода), и другие. Датчик 34 скорости вращения и датчик 36 осевого усилия соединяются с контроллером 40, и электродвигатель 6 также соединяется с контроллером 40 через управляющую схему 42.
[0022] ECU 4 тормоза включает в себя контроллер 50, главным образом, состоящий из компьютера, и контроллер 50 включает в себя исполняющий блок 50c, блок 50m памяти и блок 50i I/O (ввода/вывода), и другие. Переключатель 53 тормоза, определяющий, находится или нет элемент 52 приведения в действие тормоза, такой как педаль тормоза, в работе, датчик 54 хода, определяющий ход срабатывания элемента 52 приведения в действие тормоза, датчик 56 усилия срабатывания, определяющий усилие срабатывания, прикладываемое к элементу 52 приведения в действие тормоза посредством привода, или физическую величину, уникально соответствующую усилию срабатывания, и другие соединяются с контроллером 50.
[0023] В выполненной как указано выше тормозной системе, когда электрический тормоз 8 находится в недействующем состоянии, как показано на фиг. 2A, обычно существуют зазоры между парой фрикционных элементов 24in, 24out тормоза и ротором 20. Вал 30 располагается в самой задней позиции, и передняя торцевая поверхность 30A вала 30 располагается сзади фрикционного элемента 24in с расстоянием между ними. Таким образом, в электрическом тормозе 8, посредством действия электродвигателя 6, передняя торцевая поверхность 30A вала 30 может быть перемещена дальше назад, чем фрикционный элемент 24in, следовательно, представляется возможным предпочтительно пресекать прихватывание тормоза, когда электрический тормоз 8 находится в недействующем состоянии. Когда выводится инструкция приведения в действие тормоза, как показано на фиг. 2B, электродвигатель 6 запускается, так, чтобы перемещать вал 30 вперед. Когда ход вала 30 достигает хода sa для контакта, вал 30 тогда приходит в контакт с фрикционным элементом 24in, и фрикционный элемент 24in приходит в контакт с ротором 20. Вал 30 приходит в состояние контакта с ротором 20 через фрикционный элемент 24in.
[0024] После этого, как показано на фиг. 2C, дальнейшее перемещение вперед вала 30 перемещает суппорт 22 в осевом направлении, и, таким образом, фрикционный элемент 24out толкается вплотную к ротору 20 посредством суппорта 22. Пара фрикционных элементов 24in, 24out тормоза прижимаются к ротору 20 посредством вала 30 и суппорта 22, и, таким образом, электрический тормоз 8 приходит в действующее состояние. Ход L является ходом вала 30, пока пара фрикционных элементов 24in, 24out тормоза прижимаются к ротору 20 посредством вала 30 и суппорта 22 (далее в данном документе упоминается кратко как "пара фрикционных элементов 24in, 24out тормоза прижимается к ротору 20").
[0025] Однако, во время запуска электродвигателя 6, обычно, электродвигатель 6 вращается с большей скоростью вращения, так, чтобы перемещать вал 30 вперед с большей скоростью. Следовательно, как показано на фиг. 7, когда вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in (кратко описано как "контакт с ротором" на чертеже), осевое усилие, прикладываемое к валу 30, резко увеличивается в момент, когда пара фрикционных элементов 24in, 24out тормоза прижимается к ротору 20 (кратко описывается как "прижимается к ротору" на чертеже), таким образом, вызывая большие колебания. Вследствие этого формируются громкие звуки, или шумы вероятно должны влиять на ECU 10 двигателя. В частности, когда ECU 10 двигателя располагается поблизости от электродвигателя 6, или предусматривается как неотъемлемая часть с электродвигателем 6, более вероятно возникновение шумов.
[0026] Чтобы справляться с этим, в этом варианте осуществления, выполнено так, чтобы скорость движения вперед вала 30 уменьшалась, до того как вал 30 придет в контакт с ротором 20 через фрикционный элемент 24in. Между тем, как показано на фиг. 3, если ротор 20 испытывает кривизну поверхности, ход вала 30 до тех пор, пока вал 30 не придет в контакт с ротором 20 через фрикционный элемент 24in, изменяется вследствие этой кривизны поверхности. Кривизна поверхности ротора 20 является приемлемой в диапазоне, указанном прерывистыми линиями и штрихпунктирными линиями на фиг. 3; максимальное значение приемлемой кривизны поверхности δ(δ/2+δ/2) этого ротора 20 является "стандартным значением кривизны поверхности ", и оно является известным значением, определенным для каждого типа транспортного средства. Ход вала 30 на величину, соответствующую этому стандартному значению δ, т.е., ход вала 30 до тех пор, пока вал 30 не придет в контакт с ротором 20 через фрикционный элемент 24in, может изменяться.
[0027] Из вышеописанного, в этом варианте осуществления, каждый раз, когда электрический тормоз 8 приводится в действие, получается ход sa для контакта, который является ходом вала 30 до тех пор, пока вал 30 не придет в контакт с ротором 20 через фрикционный элемент 24in, и значение, полученное вычитанием большего значения (δ+β), чем стандартное значение δ кривизны поверхности, из хода sa для контакта, получается в качестве хода sth для начала уменьшения скорости. β является значением не меньше 0, и, например, β может быть значением не ниже 0 до значения не больше стандартного значения δ кривизны поверхности ротора 20: sth=sa-(δ+β). Кроме того, выполнено так, чтобы уменьшать скорость движения вперед вала 30 с момента, когда ход вала 30 достигает хода sth для начала уменьшения скорости.
[0028] Кроме того, в этом варианте осуществления, когда выводится инструкция приведения в действие тормоза, выполняется управление скоростью вращения электродвигателя 6, т.е., управление, чтобы приводить скорость вращения электродвигателя 6 к приблизительно целевой скорости вращения. Во время запуска электродвигателя 6 целевая скорость вращения устанавливается в первую скорость вращения, соответствующую первой скорости вала 30. Первая скорость вращения может быть установлена в максимальную скорость вращения, которая может быть выведена посредством электродвигателя 6, или установлена в скорость, зависящую от скорости срабатывания элемента 52 приведения в действие тормоза, приводимого в действие водителем, или т.п., например. Когда ход s вала 30 достигает хода sth для начала уменьшения скорости, целевая скорость вращения устанавливается во вторую скорость вращения, соответствующую второй скорости вала 30. Вторая скорость вращения является значением меньше первой скорости вращения, так что скорость движения вперед вала 30 уменьшается. Когда пара фрикционных элементов 24in, 24out тормоза прижимается к ротору 20, управление осевым усилием электродвигателя 6, т.е., управление, чтобы приводить осевое усилие, прикладываемое к валу 30 (равное толкающему усилию, которое толкает пару фрикционных элементов 24in, 24out тормоза вплотную к ротору 20) приближается к целевому осевому усилию Fdref, предоставляемому от ECU 4 тормоза.
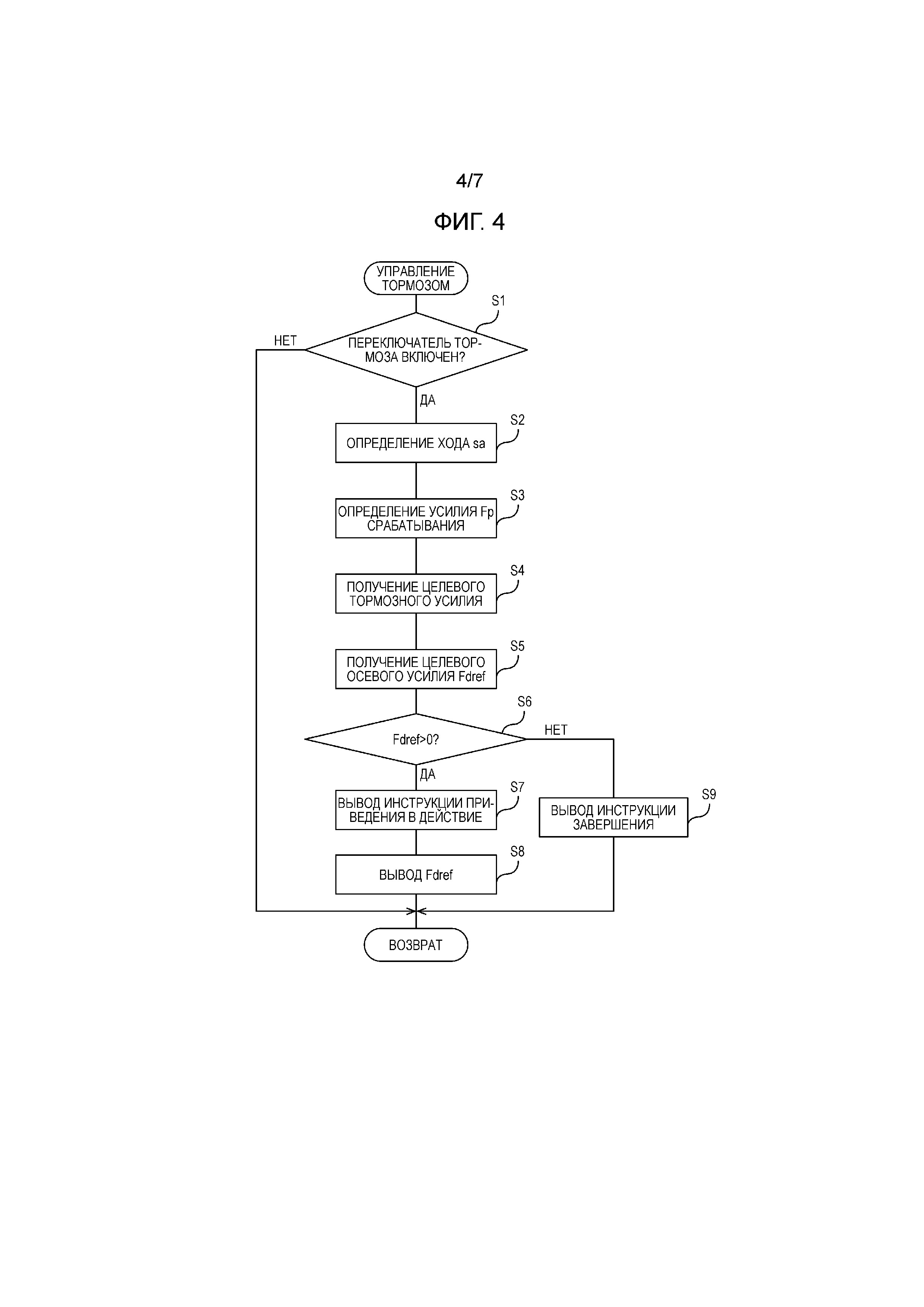
[0029] Программа управления тормозом, указанная в блок-схеме последовательности операций на фиг. 4, выполняется в ECU 4 тормоза. На этапе 1 (далее в данном документе называемом коротко этапом S1. Это справедливо и на других этапах), то, срабатывает или нет элемент 52 приведения в действие тормоза, обнаруживается на основе включенного-выключенного состояния переключателя 53 тормоза. Если переключатель 53 тормоза находится во включенном состоянии, на этапе S2 и S3, ход sp для срабатывания и усилие Fp срабатывания элемента 52 приведения в действие тормоза соответственно определяются посредством датчика 54 хода и датчика 56 усилия срабатывания. На этапе S4 и S5 целевое тормозное усилие Fref получается на основе, по меньшей мере, одного из хода sp для срабатывания и усилия Fp срабатывания, и целевое осевое усилие Fdref определяется на основе целевого тормозного усилия Fref. Целевое осевое усилие Fdref может быть установлено равным значению, приблизительно такому же, что и целевое приводное усилие (Fdref ≈ Fref) в некоторых случаях; и если выполняется рекуперативное совместное управление, или т.п., целевое осевое усилие Fdref устанавливается равным значению, приблизительно такому же, что и значение, полученное вычитанием рекуперативного тормозного усилия Fe из целевого тормозного усилия (Fdref ≈ Fref-Fe). На этапе S6 определяется, больше 0 или нет целевое осевое усилие Fdref; и если оно больше 0, инструкция приведения в действие тормоза и целевое осевое усилие Fdref выводятся соответственно на этапах S7 и S8. Напротив, если целевое осевое усилие Fdref не больше 0, инструкция завершения выводится на этапе S9.
[0030] В ECU 10 двигателя программа управления двигателем, указанная в блок-схеме последовательности операций на фиг. 5A и 5B, выполняются в каждое предварительно определенное заданное время. На этапе S21 определяется, находится или нет электродвигатель 6 в работе; на этапе S22 определяется, предоставляется или нет инструкция приведения в действие тормоза от ECU 4 тормоза. Когда электродвигатель 6 находится в остановленном состоянии, и когда инструкция приведения в действие тормоза не предоставляется, этапы S21 и S22 выполняются повторяющимся образом, и электродвигатель 6 поддерживается в состоянии остановки. С другой стороны, когда выводится инструкция приведения в действие тормоза, определение на этапе S22 является положительным; и на этапе S23 электродвигатель 6 запускается, и электродвигатель 6 вращается с первой скоростью вращения. Посредством этого вал 30 перемещается вперед с первой скоростью. На этапе S24, как будет описано позже, ход sa для контакта, который был получен, когда электродвигатель 8 был ранее приведен в действие, и сохранен в блоке 40m памяти, считывается; и на этапе S25 ход sth для начала уменьшения скорости определяется вышеописанным образом. Описание, касающееся сохранения хода sa для контакта и прочего, будет предоставлено позже.
[0031] Далее, когда эта программа выполняется, электродвигатель 6 находится в работе, и, таким образом, определение на этапе S21 является положительным; и на этапе S26 определяется, предоставляется или нет инструкция завершения. Если инструкция завершения не предоставляется, ход s и осевое усилие F вала 30 получаются соответственно на этапах S27 и S28; на этапе S29 определяется, находится или нет электродвигатель 6 под управлением осевым усилием; и на этапе S30 определяется, является или нет скорость вращения электродвигателя 6 второй скоростью вращения. Если этапы S29 и S30 выполняются сначала, оба определения являются отрицательными, и, таким образом, на этапе S31 определяется, достигает или нет ход s вала 30 хода sth для начала уменьшения скорости. Если это определение является отрицательным, этапы S21 и S26-S31 выполняются повторяющимся образом.
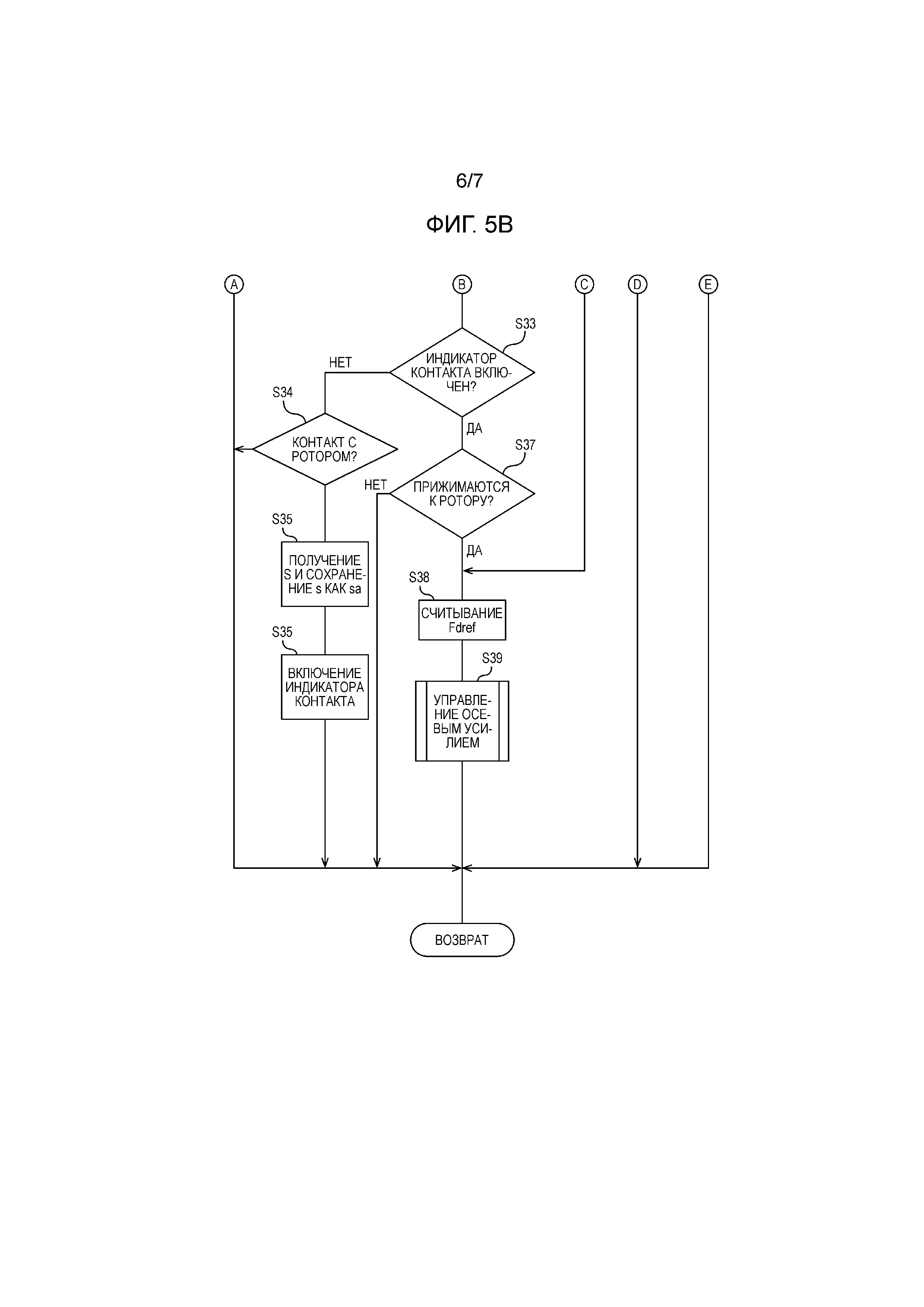
[0032] Когда ход s вала 30 достигает хода sth для начала уменьшения скорости, определение на этапе S31 является положительным; и на этапе S32 вращение электродвигателя 6 уменьшается до второй скорости вращения, так что скорость движения вперед вала 30 уменьшается до второй скорости. После этого, на этапе S33, определяется, установлен или нет индикатор контакта во включенное состояние. Индикатор контакта является индикатором, который устанавливается во включенное состояние, когда вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in. Если определение является отрицательным, на этапе S34 определяется, приходит или нет вал 30 в контакт с ротором 20 через фрикционный элемент 24in. Когда вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in, осевое усилие F резко возрастает. Следовательно, например, если удовлетворяется то, что степень осевого усилия F становится заданным значением или более, а также когда градиент увеличения осевого усилия F является заданным градиентом или более, может быть определено, что вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in. До того как вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in, этапы S21, S26-S30, S33 и S34 выполняются повторяющимся образом, и в течение этого периода времени вал 30 перемещается вперед со второй скоростью. Через короткое время, когда вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in, определение на этапе S34 является положительным; и на этапе S35 получается ход s в текущий момент, и этот ход сохраняется в качестве хода sa для контакта (см. фиг. 2B) в блоке 40m памяти; и затем индикатор контакта устанавливается во включенное состояние на этапе S36. В настоящий момент ход sa для контакта, сохраненный на этапе S35, будет использован, когда электрический тормоз 8 приводится в действие в следующий раз.
[0033] Когда эта программа выполняется в следующий раз, этапы S21, S26-S30 и S33 выполняются, и поскольку индикатор контакта включен, определение на этапе S33 является положительным, и на этапе S37 определяется, прижимается или нет пара фрикционных элементов 24in, 24out тормоза к ротору 20. Когда пара фрикционных элементов 24in, 24out тормоза прижимается к ротору 20, осевое усилие, прикладываемое к валу 30, резко увеличивается. Следовательно, как и с выполнением на этапе S34, на основе степени осевого усилия F, изменение в градиенте, и прочем, определяется, прижимается или нет пара фрикционных элементов 24in, 24out тормоза к ротору 20. Между тем, осевое усилие, когда пара фрикционных элементов 24in, 24out тормоза прижимается к ротору 20, становится обычно больше осевого усилия, когда вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in. Следовательно, вышеприведенное определение может быть выполнено при таком условии, что степень осевого усилия F больше степени осевого усилия F, когда вал 30 приходит в контакт с фрикционным элементом 24in.
[0034] Прежде чем пара фрикционных элементов 24in, 24out тормоза прижимается к ротору 20, этапы S21, S26-S30, S33 и S37 выполняются повторяющимся образом, так что скорость движения вперед вала 30 поддерживается на второй скорости. Затем, когда пара фрикционных элементов 24in, 24out тормоза прижимается к ротору 20, определение на этапе S37 является положительным; и на этапах S38 и S39 осевое усилие Fdref, предоставляемое от ECU 4 тормоза, считывается с тем, чтобы выполнять управление осевым усилием. Например, управление с обратной связью может быть выполнено с тем, чтобы приводить осевое усилие F, определяемое посредством датчика 36 осевого усилия, к приблизительно целевому осевому усилию Fdref. Когда управление осевым усилием начинается, определение на этапе S29 является положительным, и, таким образом, этапы S21, S26-S29, S38 и S39 выполняются повторяющимся образом, чтобы непрерывно выполнять управление осевым усилием. Затем, когда инструкция завершения предоставляется от ECU 4 тормоза, определение на этапе S26 является положительным; и на этапе S40 выполняется завершение процесса, такое как остановка электродвигателя 6 или т.п.
[0035] Изменения хода s и осевого усилия F вала 30, когда электродвигатель 6 управляется вышеописанным образом, показаны на фиг. 6. Как указано сплошной линией на фиг. 6, во время запуска электродвигателя 6, вал 30 перемещается вперед с первой скоростью, и когда ход s вала 30 достигает хода sth для начала уменьшения скорости, скорость вала 30 уменьшается, так что вал 30 перемещается вперед со второй скоростью. Таким образом, скорость движения вперед вала 30 уменьшается так, чтобы быть меньше первой скорости, до того как вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in; таким образом, когда вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in, как указано прерывистой линией, представляется возможным пресекать колебания осевого усилия, вызванные в момент, когда пара фрикционных элементов 24in, 24out тормоза прижимается к ротору 20, по сравнению со случаем, в котором скорость движения вперед поддерживается на первой скорости. Соответственно, представляется возможным уменьшать формируемые звуки, чтобы, тем самым, уменьшать шумы, прикладываемые к ECU 10 двигателя.
[0036] Кроме того, ход sth для начала уменьшения скорости задается равным значению, полученному вычитанием большего значения (δ+β), чем стандартное значение δ, из хода sa для контакта; следовательно, даже в случае, в котором ход sa для контакта становится меньшим вследствие кривизны поверхности ротора 20, представляется возможным надежно уменьшать скорость вала 30, до того как вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in, чтобы, тем самым, пресекать колебания. Между тем, ход sth для начала уменьшения скорости может быть задан равным значению (sa-δ), полученному вычитанием стандартного значения δ из хода sa для контакта во время предыдущей работы электрического тормоза 8, или может быть задан равным значению (sa-α), полученному вычитанием заданного значения α(<β) из хода sa для контакта во время предыдущей работы электрического тормоза 8. Также в этом случае, поскольку представляется возможным уменьшать скорость движения вперед вала 30 до второй скорости, прежде чем пара фрикционных элементов 24in, 24out прижимается к ротору 20, формирование колебаний может быть устранено во время прижатия пары фрикционных элементов 24in, 24out тормоза к ротору 20, таким образом, чтобы предпочтительно уменьшать время первоначальной реакции тормоза и предотвращать формирование более значительных колебаний.
[0037] В случае электрического тормоза 8, когда выводится инструкция приведения в действие тормоза, представляется возможным немедленно запускать электродвигатель 6, чтобы перемещать вал 30 вперед. С другой стороны, в гидравлической тормозной системе, как указано штрихпунктирной линией на фиг. 6, когда выводится инструкция приведения в действие тормоза, гидравлическое устройство приведения в действие на стороне выше по потоку запускается с тем, чтобы подавать гидравлическое масло в тормозной цилиндр, предусмотренный для колеса, со стороны выше по потоку, чтобы, тем самым, перемещать поршень тормоза вперед. Следовательно, даже когда скорость прямого хода вала 30 уменьшается в электрическом тормозе 8, время первоначальной реакции тормоза становится меньше, по сравнению с временем первоначальной реакции в случае гидравлической тормозной системы. Кроме того, если первая скорость вращения устанавливается в максимальное значение, которое может быть выведено посредством электродвигатель 6, представляется возможным дополнительно уменьшать время первоначальной реакции электрического тормоза 8.
[0038] Как упомянуто выше, в этом варианте осуществления, контроллер двигателя состоит из секции, которая хранит программу управления двигателем, указанную в блок-схеме последовательности операций ECU 10 двигателя на фиг. 5A и 5B, секции, которая исполняет эту программу, и других. Для этого контроллера двигателя, блок управления скоростью движения вперед состоит из секции, которая хранит этапы S23, S27, S30-S23, секции, которая исполняет эти этапы, и других; блок управления осевым усилием состоит из секции, которая хранит этап S39, секции, которая исполняет этот этап, и других; и блок определения заданной позиции состоит из секции, которая хранит этап S25, секции, которая исполняет этот этап, и других. Позиция контакта является позицией передней торцевой поверхности 30A, когда вал 30 приходит в контакт с ротором 20 через фрикционный элемент 24in, и в этом случае ход вала 30 (передней торцевой поверхности 30A) соответствует ходу sa для контакта. Заданная позиция соответствует позиции передней торцевой поверхности 30A, когда ход вала 30 достигает хода sth для начала уменьшения скорости.
[0039] Структура электродвигателя 8 не ограничивается конкретной структурой. Необязательно выполнять заданную позицию, чтобы она была позицией в или дальше назад, чем стандартное значение δ хода sa для контакта, и она может быть любой позицией, поскольку эта позиция располагается дальше назад, чем позиция вала 30, когда фрикционные элементы 24in, 24out тормоза прижаты к ротору 20. Кроме того, это изобретение может быть применено к барабанному тормозу, включающему в себя барабан в качестве вращающейся части тормоза. В этом случае, это изобретение может быть реализовано способом, подвергаемым различным улучшениям и модификациям на основе знания специалистов в области техники, так что заданная позиция может быть определена на основе стандартного значения для отклонения позиции фиксации барабана, или т.п.
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания

