Результат интеллектуальной деятельности: Способ управления параметрами системы подрессоривания, повышающий эффективность торможения транспортного средства
Вид РИД
Изобретение
Решение относится к транспортному машиностроению, а именно к тормозным системам и системам подрессоривания.
Известна конструкция активной подвески (US 8,172,237 B2, 8.05.2012), содержащая продольные направляющие элементы, амортизаторы с возможностью управления коэффициентом демпфирования, пневматические упругие элементы с возможностью изменения жесткости и контроллер управления системой. Характеристики упругих элементов и амортизаторов изменяются по запросу контроллера управления системой с целью улучшения показателей плавности хода, управляемости и устойчивости транспортного средства. Характеристики демпфирования амортизаторов также могут изменяться с целью гашения колебаний, вызванных изменением жесткости пневматических упругих элементов.
С использованием компонентного состава указанной системы кроме повышения плавности хода, управляемости и устойчивости можно добиться повышения эффективности торможения транспортного средства, чего не было сделано в прототипе.
Решаемая задача – Применение нового способа повышения эффективности торможения с использованием существующей компонентной базы систем подрессоривания.
Технический результат – повышение эффективности торможения транспортного средства в отношении увеличения максимального замедления и сокращения тормозного пути.
Заявленный технический результат достигается тем, что адаптивная подвеска транспортного средства, состоящая из электронного блока управления, шины передачи данных, направляющих и упругих элементов, амортизаторов с возможностью управления коэффициентом затухания, пневматических упругих элементов с возможностью управления жесткостью, имеющая метод управления параметрами жесткости и демпфирования, включающий в себя:
- активное изменение, по меньшей мере, одной из характеристик демпфирования и жесткости для обеспечения желаемых характеристик управляемости и устойчивости транспортного средства и активного управления нагнетанием и сбрасыванием давления в пневматическом упругом элементе для поддержания постоянного коэффициента демпфирования для каждого узла пневматического упругого элемента, в том числе:
- изменение коэффициента демпфирования для устранения нежелательных колебаний, вызванных изменением жесткости пневматического упругого элемента;
- определение величины нежелательных колебаний посредством измерения и наблюдения за колебаниями колес и кузова транспортного средства и косвенное определение изменения жесткости подвески с учетом давления внутри пневматического упругого элемента и заданных таблиц, которые определяют зависимость жесткости от давления;
- изменение жесткости подвески для поддержания желаемого демпфирования колебаний;
- управление характеристиками пневматических упругих элементов и амортизаторов независимо друг от друга;
- управление характеристиками жесткости пневматических упругих элементов в соответствии с изменениями характеристик демпфирования амортизаторов и управление характеристиками амортизаторов в соответствии с изменениями жесткости пневматических упругих элементов;
- управление жесткостью пневматических упругих элементов с помощью нагнетания и сброса давления в пневматическом упругом элементе, в том числе изменяя коэффициент демпфирования амортизаторов в соответствии с изменением жесткости пневматических упругих элементов;
- определение силы в реальном времени, необходимой для гашения нежелательных колебаний транспортного средства и изменение коэффициента демпфирования амортизаторов для генерации указанной силы;
отличается тем, что метод управления характеристиками системы подрессоривания подразумевает коммуникационную связь с контроллером управления тормозной системы и при торможении транспортного средства предусматривает выполнение сброса давления в пневматических упругих элементах задней подвески с целью повышения величины максимальной силы сцепления колес с поверхностью дороги с соответствующим управлением характеристиками затухания амортизаторов с целью повышения величины хода сжатия и последующего максимального сокращения хода отбоя задней подвески.
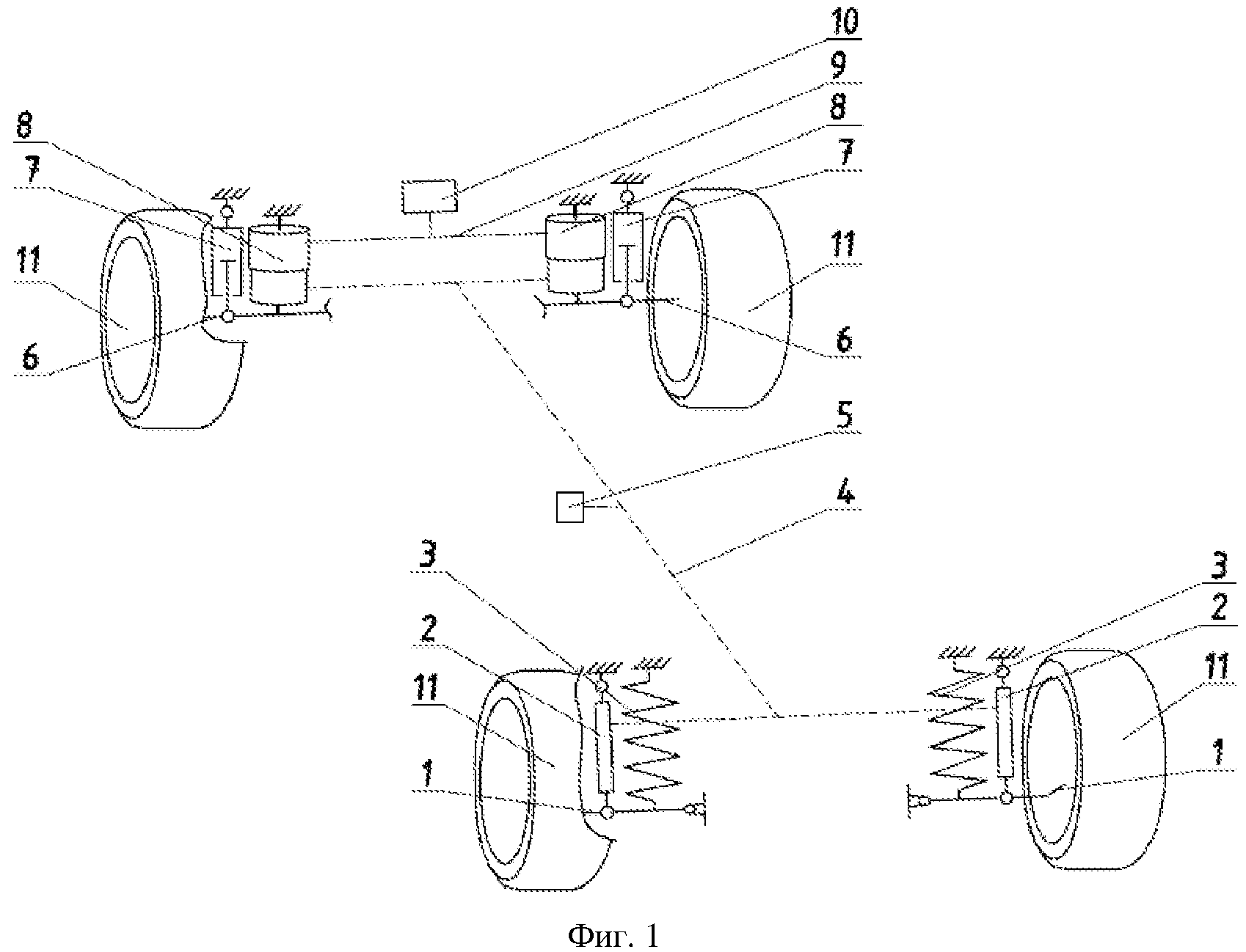
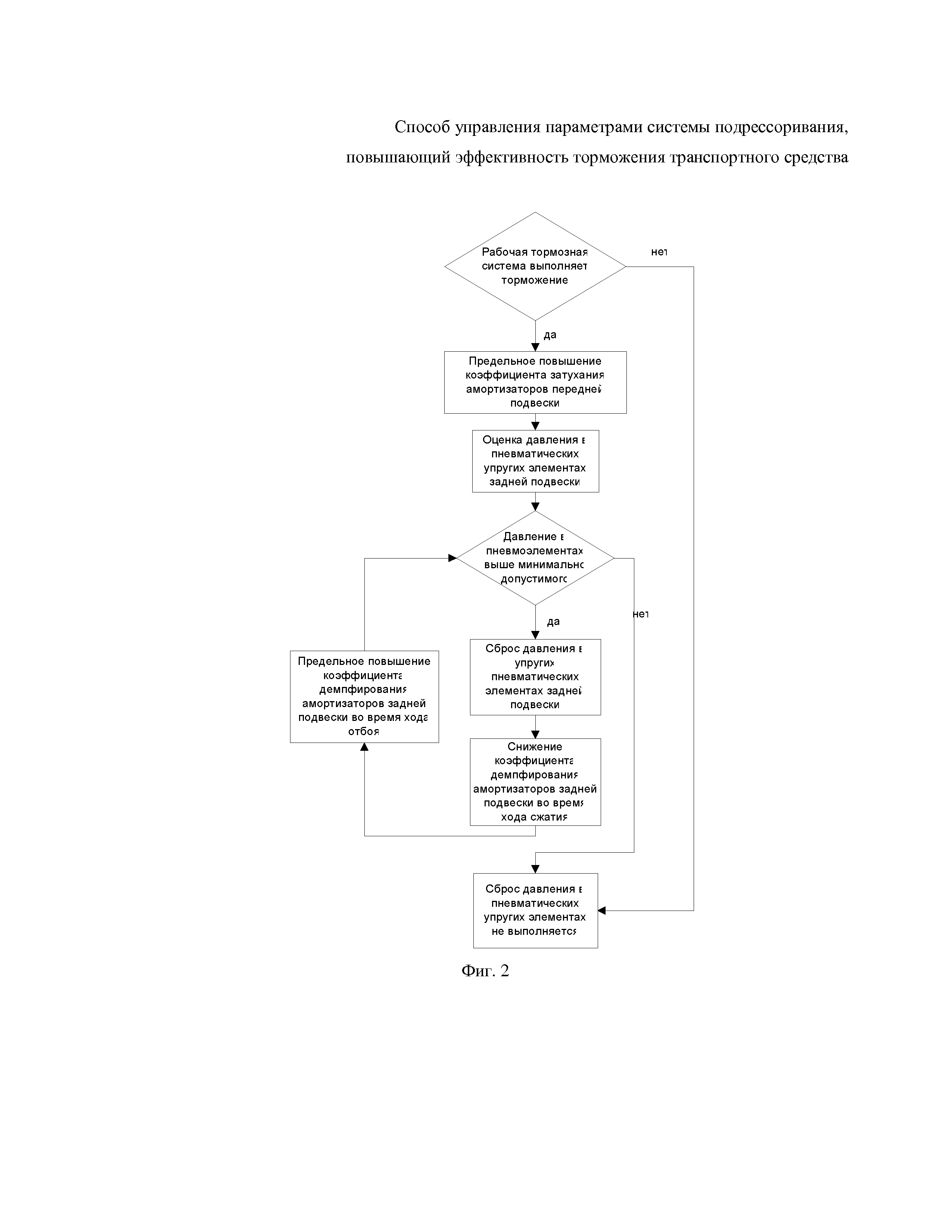
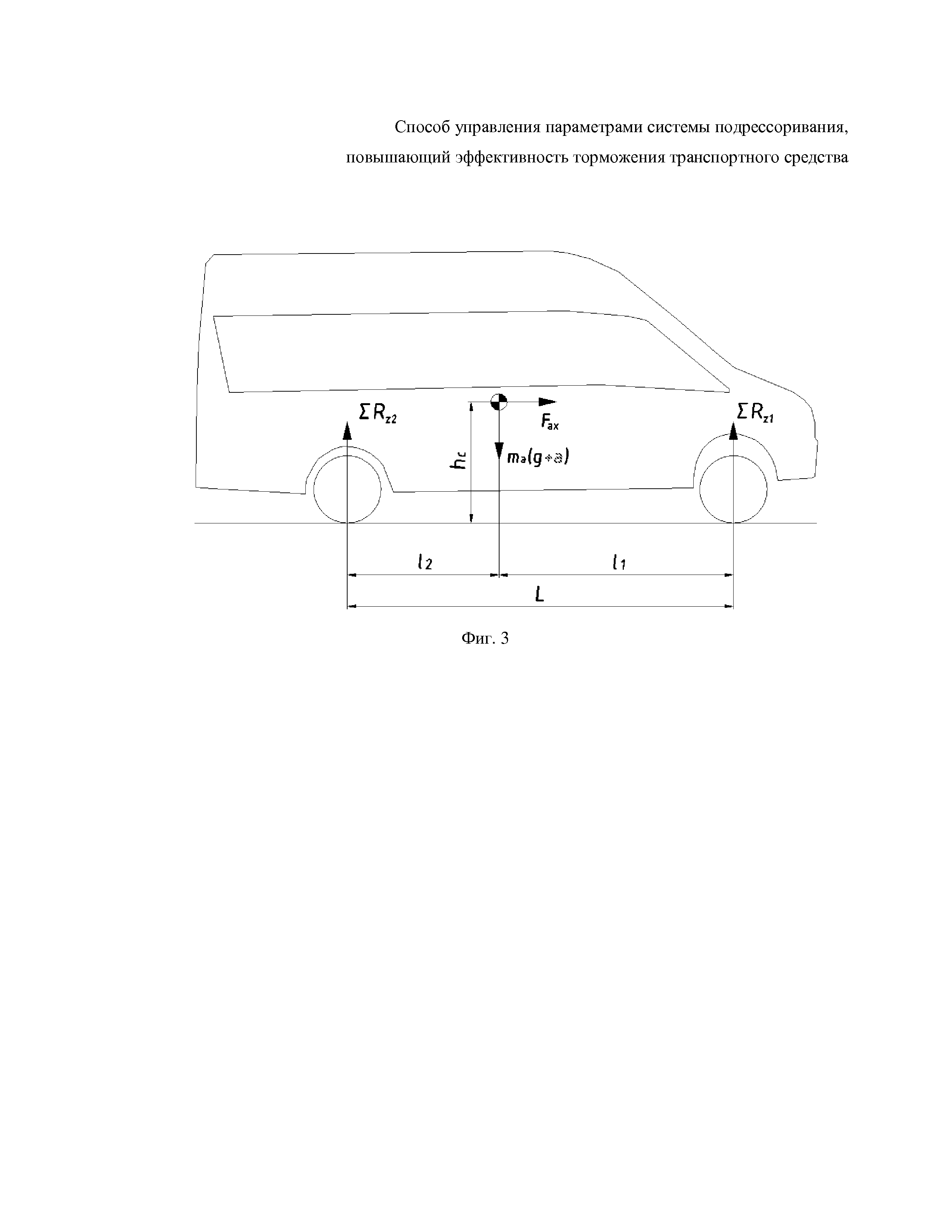
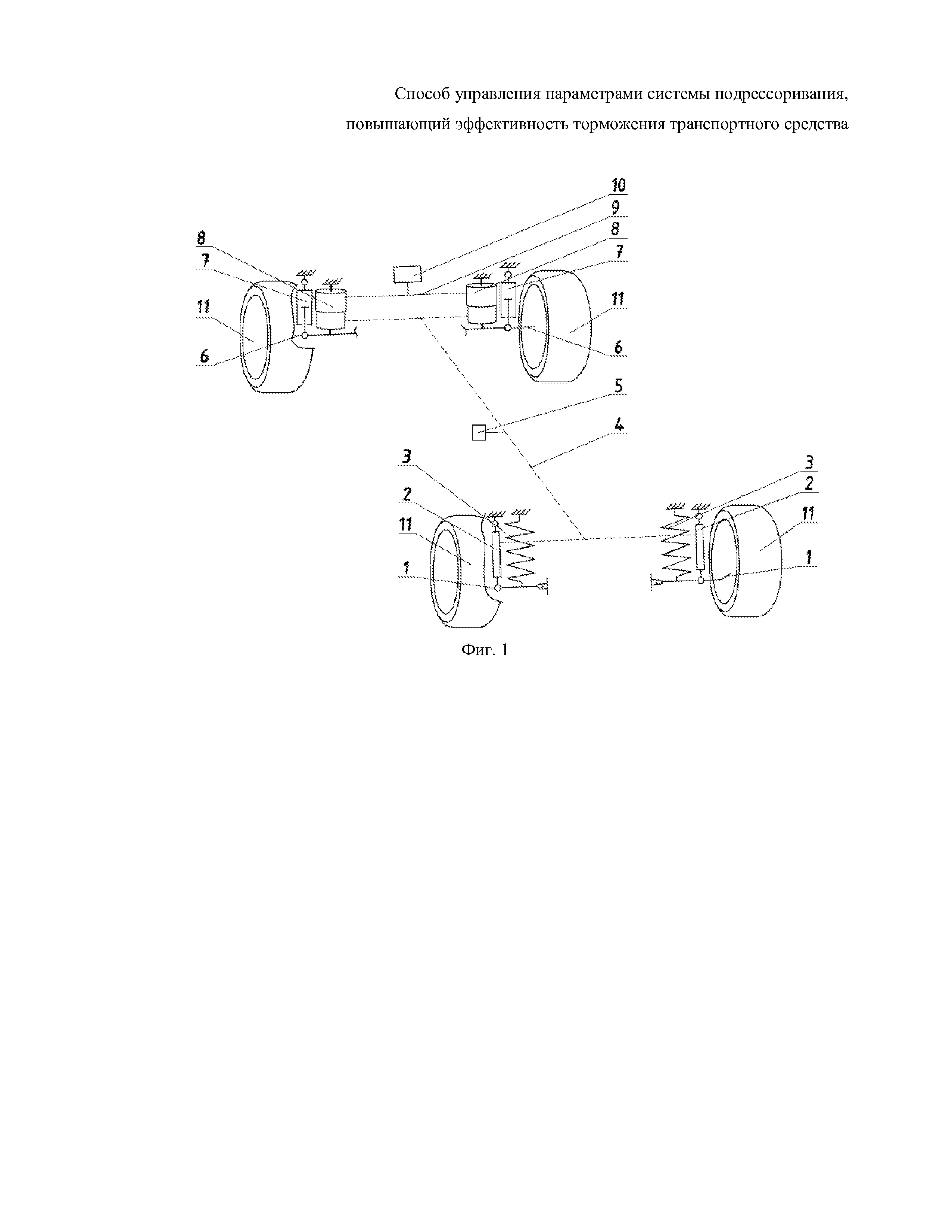
Основные параметры предлагаемой системы подрессоривания транспортного средства показаны на рисунках: фиг. 1 - общая схема и компонентный состав модели ; фиг. 2 - блок-схема предлагаемого способа управления параметрами системы подрессоривания при торможении транспортного средства; фиг. 3 - силы действующие на автомобиль при торможении с использованием предлагаемого способа управления параметрами системы подрессоривания.
Предлагаемая модель системы подрессоривания транспортного средства состоит из направляющих элементов передней подвески 1 (могут состоять из различных комбинаций поперечных и продольных рычагов, возможно использование рессор в качестве направляющих элементов), амортизаторов передней подвески с возможностью управления коэффициентом затухания 2, упругих элементов 3 передней подвески (могут быть пружинами, рессорами, торсионами или пневмоэлементами), шины передачи данных 4, электронного блока управления 5, направляющих элементов задней подвески 6, амортизаторов задней подвески с возможностью управления коэффициентом затухания 7, пневматических упругих элементов задней подвески с датчиками давления и возможностью управления жесткостью 8, магистралей подачи газа 9, компрессора 10.
Предлагаемый способ управления параметрами системы подрессоривания при торможении заключается в следующем.
При выполнении торможения электронный блок управления тормозной системой посылает сигнал в электронный блок управления 5, далее, по запросу блока управления 5 с использованием шины передачи данных 4 выполняется предельное повышение коэффициента демпфирования амортизаторов передней подвески 2, затем происходит оценка давления газа в пневмоэлементах 8 и если значение давления ниже предельного, то сброс давления не производится. В противном случае выполняется фиксированный сброс давления в пневмоэлементах 8 и минимизация коэффициента демпфирования в амортизаторах 7 при ходе сжатия задней подвески. Таким образом повышается сила сцепления колес транспортного средства 11 с опорной поверхностью. В начале хода отбоя задней подвески производится предельное повышение коэффициента затухания амортизаторов 7. Далее производится повторная оценка давления в пневмоэлементах 8 и цикл повторяется. После прекращения торможения давление газа в пневмоэлементах 8 восстанавливается с использованием компрессора 10 и магистралей подачи газа 9. На фиг. 2 показана работа предлагаемой системы в виде структурной блок схемы.
Повышение эффективности торможения достигается благодаря увеличению максимальной силы сцепления колес с опорной поверхностью за счет увеличения нормальной реакции опорной поверхности в зонах контакта с колесами транспортного средства. Как видно из схемы, представленной на фиг. 3, уравнения для определения величины реакций опорной поверхности будут выглядеть следующим образом:
 ;
;  ,
,
где  – сумма нормальных реакций опорной поверхности, действующих на переднюю ось транспортного средства;
– сумма нормальных реакций опорной поверхности, действующих на переднюю ось транспортного средства;  – сумма нормальных реакций опорной поверхности, действующих на заднюю ось транспортного средства; m – масса транспортного средства;
– сумма нормальных реакций опорной поверхности, действующих на заднюю ось транспортного средства; m – масса транспортного средства;  – ускорение свободного падения; a – вертикальное ускорение, генерируемое работой предложенной модели адаптивной подвески;
– ускорение свободного падения; a – вертикальное ускорение, генерируемое работой предложенной модели адаптивной подвески;  – горизонтальное расстояние от оси передних колес до центра тяжести транспортного средства;
– горизонтальное расстояние от оси передних колес до центра тяжести транспортного средства;  – горизонтальное расстояние от оси задних колес до центра тяжести транспортного средства;
– горизонтальное расстояние от оси задних колес до центра тяжести транспортного средства;  – коэффициент сцепления колес транспортного средства с опорной поверхностью;
– коэффициент сцепления колес транспортного средства с опорной поверхностью;  – высота расположения центра тяжести;
– высота расположения центра тяжести;  – расстояние от оси передних колес до оси задних колес.
– расстояние от оси передних колес до оси задних колес.
Как видно из уравнений, ускорение, генерируемое работой предложенной модели адаптивной подвески, увеличивает величину нормальных реакций опорной поверхности.
Ветроэнергетическая установка с системой автоматического регулирования
Устройство для переработки нефтеотходов
Многофункциональный инновационный модульный дозиметр
Активно-импульсный комплекс ночного видения
Способ и устройство для адаптивной радиосвязи
Способ изготовления отливок из чугуна с дифференцированной структурой
Способ удаления цинка с оцинкованной стали
Многопозиционная машина трения
Экзотермическая смесь для обогрева прибылей стальных и чугунных отливок
Способ определения места повреждения линии электропередачи
Штамм escherichia coli bl21(de3)/pafp11d3 - продуцент фрагмента с 404 по 609 аминокислоту альфа-фетопротеина человека
Способ получения конъюгата фрагмента альфа-фетопротеина человека с ципрофлоксацином
Способ получения активного фрагмента альфа-фетопротеина человека
Фотоэлектрический модуль
Фотоэлектрический модуль
Устройство и способ для проведения экзамена на право управления транспортными средствами
Система помощи водителю
Получение гена фосфолипазы а2 с измененным оптимумом рн путем удаления сайтов гликозилирования
Способ микробиологической продукции химозина быка с использованием рекомбинантного штамма pichia pastoris, содержащего синтетический ген варианта химозина с коэкспрессией фактора hac1

