Результат интеллектуальной деятельности: Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Вид РИД
Изобретение
Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала (Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала: пат. 2586859 Рос. Федерация: МПК7 G05B 23/02 (2006.01) / Шалобанов С.В., Шалобанов С.С. - №2015108550/08; заявл. 11.03.2015; опубл. 10.06.2016, Бюл. №16).
Недостатком этого способа является то, что он обеспечивает определение дефектов только в режиме тестового диагностирования и характеризуется более высокими вычислительными затратами из-за использования экспоненциальной функции для получения интегральных оценок сигналов.
Наиболее близким техническим решением (прототипом) является способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала (Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала: пат. 2562428 Рос. Федерация: МПК7 G05B 23/02 (2006.01) / Шалобанов С.В., Шалобанов С.С. - №2014152641/08; заявл. 24.12.2014; опубл. 10.09.2015, Бюл. №25).
Недостатком этого способа являются большие вычислительные затраты, так как он предполагает вычисление отклонений выходных сигналов моделей, использующих измененную позицию входного сигнала.
Технической задачей, на решение которой направлено данное изобретение, является уменьшение вычислительных затрат, связанных с реализацией отклонений сигналов моделей со смененной позицией входного сигнала.
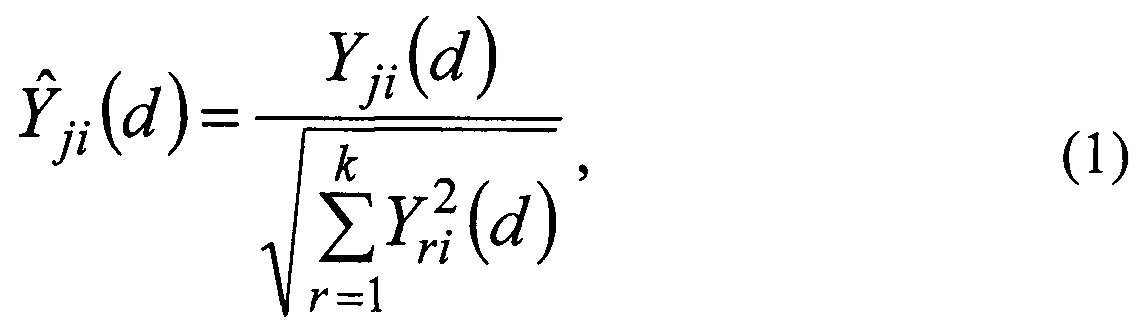
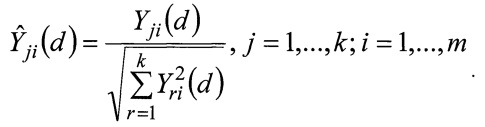
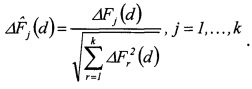
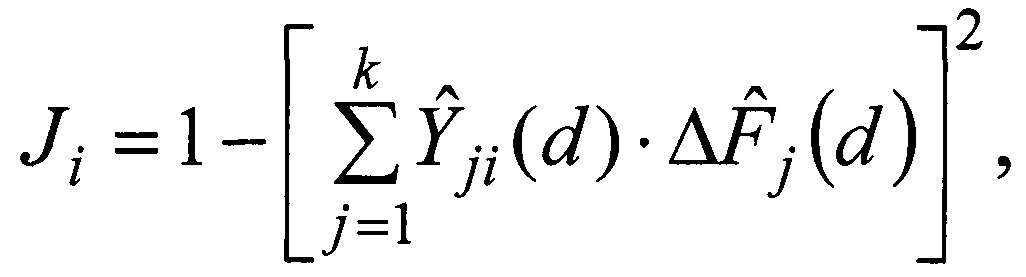
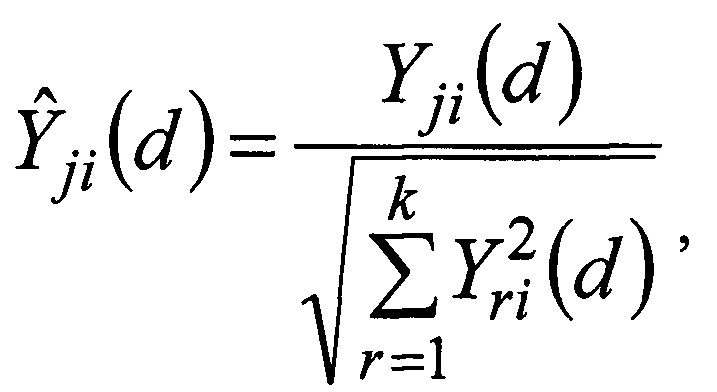
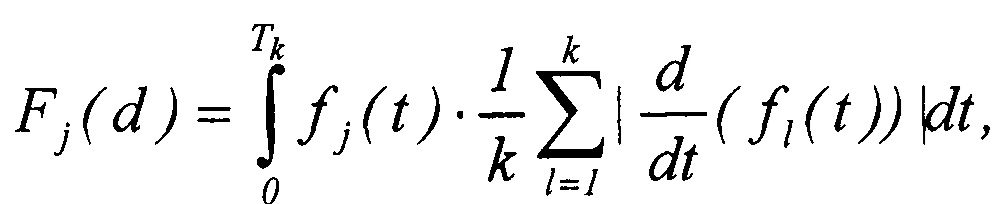
Поставленная задача достигается тем, что регистрируют реакцию заведомо исправной системы ƒjном(t), j=1, …, k на интервале t∈[0,TK] в k контрольных точках, и определяют интегральные оценки выходных сигналов Fjном(d), j=1, …, k системы, для чего в момент подачи тестового или рабочего сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование выходных сигналов этой системы для каждой из k контрольных точек с весовой функцией, равной среднему арифметическому значению модулей производных ее выходных сигналов в контрольных точках, где усреднение производится по числу контрольных точек. Для этого на первые входы k блоков перемножения подают выходные сигналы системы, на вторые входы блоков перемножения подают среднее арифметическое значение модулей производных по времени выходных сигналов, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов Fjном(d), j=1, …, k регистрируют, одновременно определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек и каждой из m позиций входного сигнала, полученные в результате смены позиции входного сигнала после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают место подачи входного сигнала на выход каждого блока, подают через сумматор входной сигнал и находят интегральные оценки выходных сигналов системы при том же рабочем или тестовом входном сигнале x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждой из m моделей с различной (зафиксированной на выходах разных блоков) позицией входного сигнала Yji(d), j=1, …, k; i=1, …, m регистрируют, одновременно на вход контролируемой системы подают тестовый или рабочий сигнал x(t), определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек Fj(d), j=1, …, k, полученные значения регистрируют, определяют нормированные значения интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков из соотношения:
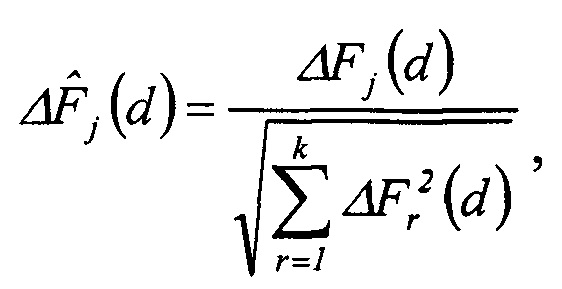
определяют деформации интегральных оценок выходных сигналов контролируемой системы для k контрольных точек ΔFj(d)=Fj(d)-Fjном(d), j=1, …, k, определяют нормированные значения деформаций интегральных оценок выходных сигналов контролируемой системы:

определяют диагностические признаки:

по минимуму значения диагностического признака определяют неисправный блок.
Сущность предлагаемого способа заключается в следующем.
Способ основан на использовании смены позиции входного сигнала непрерывной динамической системы. Для получения диагностических признаков динамических элементов используются интегральные оценки на временном интервале Tk в k контрольных точках:

Весовая функция в формуле (4) в виде среднего значения модулей производных сигналов в контрольных точках несет информацию о важности момента времени с точки зрения скорости изменения выходных сигналов во всех контрольных точках. Чем больше средняя скорость изменения выходных сигналов, тем с большим весом интегрируется выходной сигнал. Используя векторную интерпретацию выражения (3), запишем его в следующем виде

где ϕi(d) - угол между нормированным вектором (вектором единичной длины) деформаций интегральных оценок выходных сигналов объекта с элементами  и нормированным вектором (единичной длины) деформаций интегральных оценок выходных сигналов модели с элементами
и нормированным вектором (единичной длины) деформаций интегральных оценок выходных сигналов модели с элементами  , полученными в результате смены позиции входного сигнала i-го блока.
, полученными в результате смены позиции входного сигнала i-го блока.
Таким образом, нормированный диагностический признак (3) представляет собой значение квадрата синуса угла, образованного в k-мерном пространстве (где k - число контрольных точек) нормированными векторами интегральных оценок выходных сигналов моделей с измененной позицией входного сигнала и реальной деформации интегральных оценок выходных сигналов объекта диагностирования.
Модель с измененной позицией входного сигнала после данного блока, минимизирующая значение диагностического признака (3), указывает на наличие дефекта в этом блоке. Область возможных значений диагностического признака лежит в интервале [0,1].
Таким образом, предлагаемый способ поиска неисправного блока сводится к выполнению следующих операций:
1. В качестве динамической системы рассматривают систему, состоящую из произвольно соединенных динамических блоков, с количеством рассматриваемых блоков m.
2. Предварительно определяют время контроля ТК≥ТПП, где TПП - время переходного процесса системы. Время переходного процесса оценивают для номинальных значений параметров динамической системы.
3. Фиксируют число контрольных точек k.
4. Одновременно подают тестовый сигнал x(t) (единичный ступенчатый) или рабочий сигнал на вход системы управления с номинальными параметрами, на вход контролируемой системы, на входы m моделей, полученные в результате смены позиции входного сигнала на позицию после i-го блока каждого из m блоков для номинальных значений параметров передаточных функций блоков.
5. Одновременно регистрируют реакцию системы с номинальными характеристиками ƒjном(t), реакцию контролируемой системы ƒj(t), реакции моделей с измененной позицией входного сигнала на позицию после i-ого блока Yji(t) в k контрольных точках j=1, …, k на интервале t∈[0,ТK].
6. Одновременно определяют интегральные оценки выходных сигналов Fjном(d), j=1, …, k системы с номинальными характеристиками, контролируемой системы Fj(d), j=1, …, k, моделей с измененной позицией входного сигнала на позицию после i-ого блока Yji(d), j=1, …, k; i=1, …, m. Для этого в момент подачи входного сигнала одновременно начинают интегрирование выходных сигналов в каждой из k контрольных точек системы с номинальными характеристиками, контролируемой системы, моделей с измененной позицией входного сигнала, равной среднему арифметическому значению модулей производных сигналов в контрольных точках, где усреднение производится по числу контрольных точек, для чего выходные сигналы каждой системы подают на первые входы k блоков перемножения, на вторые входы блоков перемножения подают среднее арифметическое значение модулей производных выходных сигналов системы в контрольных точках, где усреднение производится по числу контрольных точек выходных сигналов системы, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов Fjном(d), j=1, …, k, Fj(d), j=1, …, k, Yji(d), j=1, …, k; i=1, …, m регистрируют.
7. Определяют нормированные значения интегральных оценок выходных сигналов модели, полученные в результате смены позиции входного сигнала на позицию после соответствующих блоков:
8. Определяют деформации интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений ΔFj(d)=Fj(d)-Fjном(d), j=1, …, k
9. Вычисляют нормированные значения деформаций интегральных оценок выходных сигналов контролируемой системы по формуле:
10. Вычисляют диагностические признаки наличия неисправного блока по формуле (3).
11. По минимуму значения диагностического признака определяют дефектный блок.
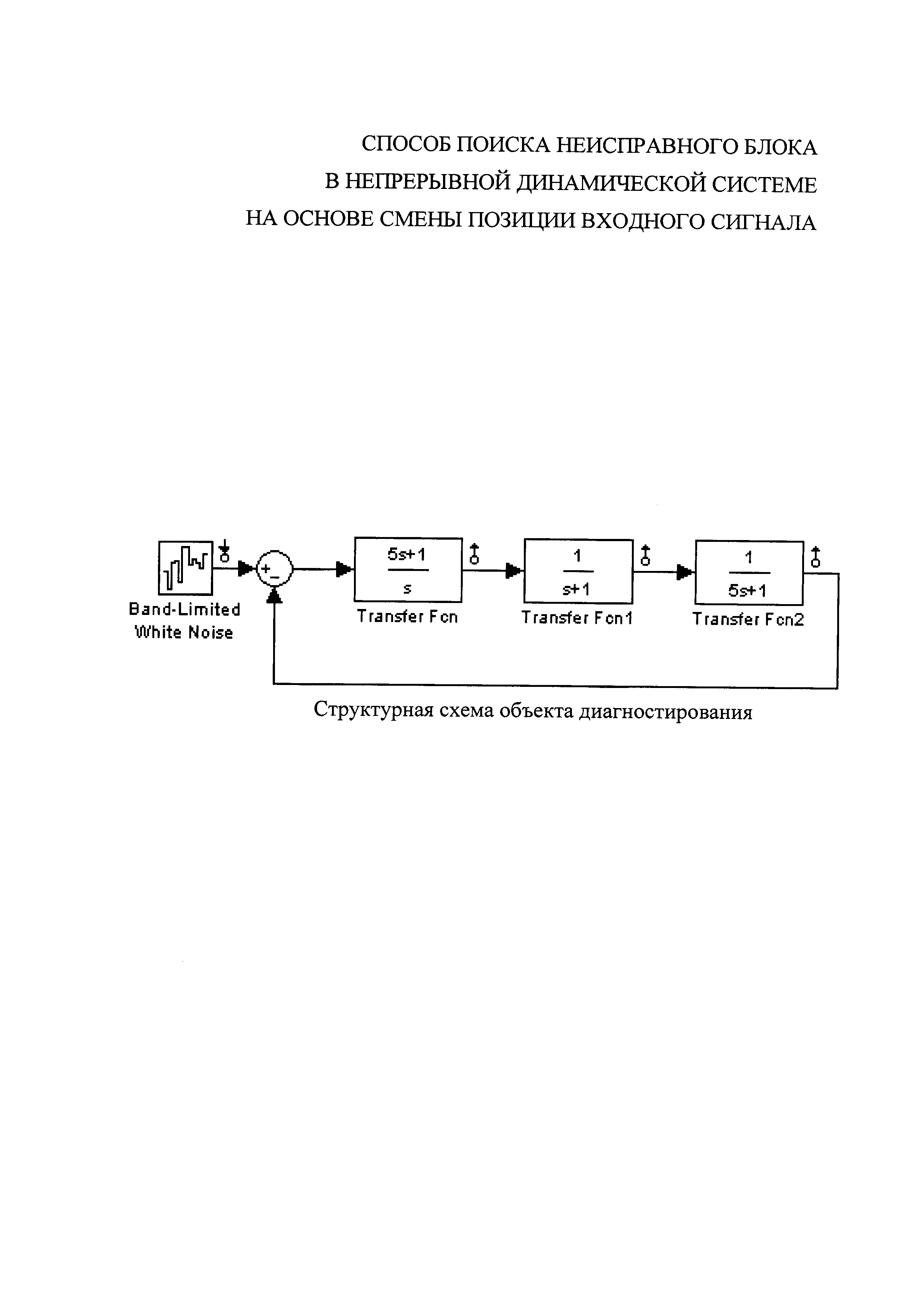
Рассмотрим реализацию предлагаемого способа поиска дефекта блока для системы, структурная схема которой представлена на рисунке (см. фиг. Структурная схема объекта диагностирования).
Передаточные функции блоков:
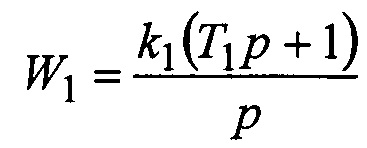 ;
; 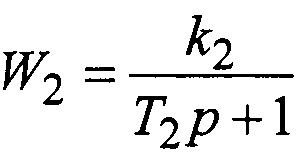 ;
; 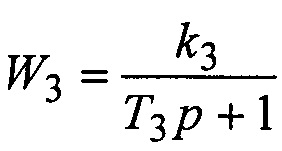 ,
,
где номинальные значения параметров: Т1=5 с; K1=1; K2=1; Т2=1 с; K3=1; Т3=5 с.
При моделировании в качестве входного сигнала будем использовать псевдослучайный сигнал (при моделировании использовался блок Band-Limited White Noise в среде Matlab). Время контроля выберем Тк равным 10 с.
При поиске одиночного дефекта в виде отклонения коэффициента усиления k3=0.8 в третьем звене путем подачи псевдослучайного рабочего входного сигнала и интегрального преобразования сигналов с дифференциальной весовой функцией и Тк=10 с получены значения диагностических признаков на основе смены позиции входного сигнала с использованием отклонений сигналов моделей со смененной позицией входного сигнала (прототип) при использовании трех контрольных точек, расположенных на выходах блоков: J1=0.143; J2=0.219; J3=0.065. Минимальное значение признака J3 однозначно указывает на наличие дефекта в третьем блоке, а разность между первым и третьим признаками может количественно характеризовать практическую (апостериорную) различимость этого дефекта ΔJ=J1-J3=0.078.
Тот же дефект, найденный путем смены позиции входного сигнала без использования отклонений сигналов моделей со смененной позицией входного сигнала и вычислений по формуле (3), дает следующие значения диагностических признаков: J1=0.143; J2=0.219; J3=0.065. Анализ значений диагностических признаков показывает, что значения второго и третьего признака, полученные без использования отклонений сигналов моделей со смененной позицией входного сигнала, практически такие же, как и при использовании отклонений сигналов моделей со смененной позицией входного сигнала (прототип). Это позволяет сделать вывод, что практическая различимость дефекта первого блока (прототипа) практически такая же, как и при использовании заявляемого способа. Различимости дефектов второго и первого блоков при поиске их без использования отклонений сигналов моделей со смененной позицией входного сигнала тоже практически такие же, как и при использовании отклонений сигналов моделей со смененной позицией входного сигнала.
Моделирование процессов поиска дефектов во втором и первом блоках для данного объекта диагностирования, при тех же условиях диагностирования и при псевдослучайном рабочем входном сигнале дает следующие значения диагностических признаков (формула 3):
При наличии дефекта в блоке №2 (в виде уменьшения параметра k2 на 20%, дефект №2): J1=0.8516; J2=0; J3=0.6808.
При наличии дефекта в блоке №3 (в виде уменьшения параметра k1 на 20%, дефект №1) J1=0; J2=0.3158; J3=0.1065.
Минимальное значение диагностического признака во всех случаях правильно указывает на дефектный блок. Заявляемый способ позволяет осуществлять диагностирование в условиях реального функционирования объекта диагностирования (рабочее диагностирование) и уменьшает объем требуемых вычислений в сравнении с прототипом.
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала, основанный на том, что фиксируют число динамических элементов, входящих в состав системы, определяют время контроля Т≥Т, используют входной сигнал x(t) на интервале t∈[0,T], фиксируют число k контрольных точек системы, регистрируют реакцию контролируемой системы ƒ(t), j=1,…,k, регистрируют реакцию системы с номинальными характеристиками ƒ(t), j=1,…,k на интервале t∈[0,T] в k контрольных точках, подают сигнал x(t) на вход системы с номинальными характеристиками, на вход контролируемой системы, на входы m моделей с номинальными характеристиками, полученные в результате смены позиции входного сигнала на позицию после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают позицию входного сигнала на позиции после каждого рассматриваемого блока, подают туда через сумматор входной сигнал x(t) и находят интегральные оценки выходных сигналов системы для входного сигнала x(t), в качестве динамических характеристик системы используют интегральные оценки, полученные для весовой функции, равной среднему арифметическому модулей производных по времени от выходных сигналов системы в различных контрольных точках, из соотношения определяют интегральные оценки выходных сигналов F(d), j=1,…,k системы с номинальными характеристиками, для чего в момент подачи входного сигнала на вход системы с номинальными характеристиками начинают интегрирование выходных сигналов системы в каждой из k контрольных точек для весовой функции, путем подачи на первые входы k блоков перемножения выходных сигналов системы на вторые входы блоков перемножения подают среднее арифметическое модулей производных по времени от выходных сигналов системы с номинальными характеристиками, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Т, полученные в результате интегрирования оценки выходных сигналов F(d), j=1,…,k регистрируют, аналогично определяют интегральные оценки выходных сигналов m моделей для каждой из k контрольных точек, полученные в результате смены позиции входного сигнала на позицию после каждого из m блоков, полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек, каждой из m моделей с измененной позицией входного сигнала Y(d), j=1,…,k; i=1,…,m регистрируют, определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек, определяют деформации интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений ΔF(d)=F(d)-F(d), j=1,…,k, определяют нормированные значения деформаций интегральных оценок выходных сигналов контролируемой системы , полученные нормированные значения интегральных оценок выходных сигналов используют для вычисления диагностических признаков, отличающийся тем, что определяют нормированные значения интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков из соотношения определяют диагностические признаки из соотношения: i=1,…,m, по минимуму диагностического признака определяют неисправный блок.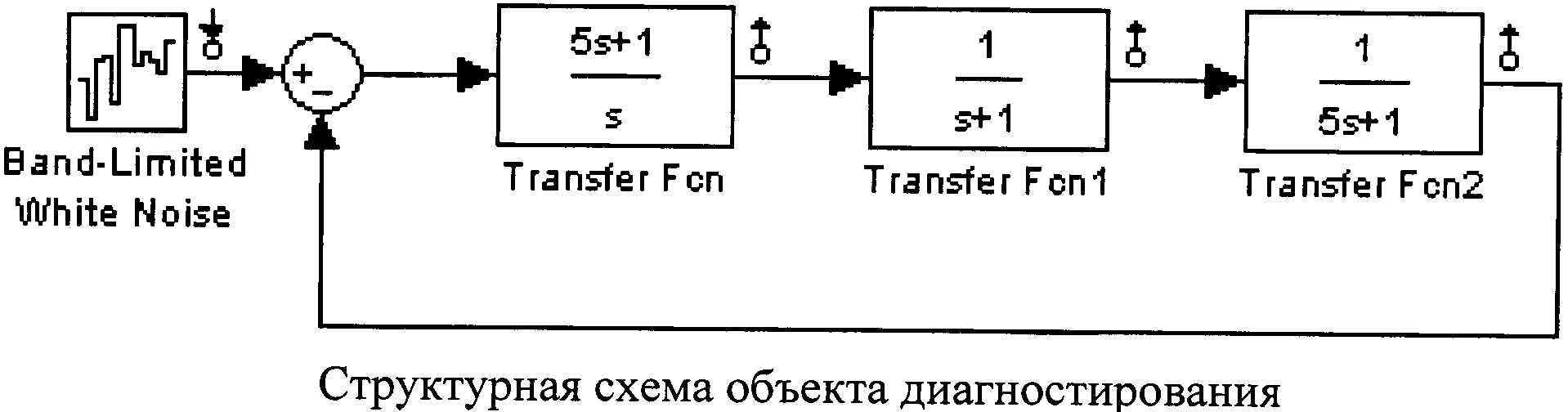
Устройство для получения талой питьевой воды
Способ изготовления стенового материала
Способ усиления железобетонных пролетных строений ребристой структуры
Разделяющийся грузозахватный механизм нисходящего типа движения
Способ взвешивания груза
Способ лесопользования
Способ ремонта гидравлических двигателей
Устройство для сбора сока деревьев
Электродегидратор
Механический каверномер с ручным приводом для взрывных скважин
Способ поиска неисправного блока в непрерывной динамической системе на основе функции чувствительности
Способ поиска неисправностей динамического блока в непрерывной системе на основе введения пробных отклонений
Способ поиска неисправного блока в непрерывной динамической системе на основе введения пробных отклонений и анализа знаков передач
Способ поиска неисправного блока в непрерывной динамической системе на основе функции чувствительности
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала и анализа знаков передач

