Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ
Вид РИД
Изобретение
Предлагаемое изобретение относится к измерительной технике, в частности к устройствам для проведения калибровки инерциальных измерительных модулей (ИИМ), в состав которых входят датчики угловой скорости (ДУС) и акселерометры.
Известен быстрый способ калибровки ИИМ [1]. В соответствии с данным способом, оператор вращает ИИМ во всех направлениях без внешнего оборудования, либо с помощью оборудования. Снимаемые в это время с ИИМ данные позволяют определять 12 коэффициентов моделей погрешностей датчиков ИИМ, в том числе, скорости дрейфов и масштабные коэффициенты ДУС, нулевые сигналы и масштабные коэффициенты акселерометров.
Недостатком данного способа является отсутствие среди оцениваемых коэффициентов модели ошибок калибруемых датчиков коэффициентов G-чувствительности. Определение этих коэффициентов особенно актуально для микромеханических ДУС, т.к. дрейфы, вызванные влиянием линейных ускорений на показания ДУС такого типа, могут достигать уровня 0.1°/c с и являются величинами одного порядка с нулевыми сигналами ДУС. Не включение данных коэффициентов в модель погрешностей ДУС приводит к неверному оцениванию нулевых сигналов ДУС.
Известен также способ калибровки ИИМ по каналу акселерометров [2], при проведении которого ИИМ закрепляют на платформе поворотного стола низкой точности, платформу поворотного стола разворачивают во всем диапазоне углов крена и тангажа относительно вектора ускорения свободного падения с фиксированным шагом, в каждом положении фиксируют показания акселерометров и углы поворотов, численными методами проводят идентификацию математической модели каждого акселерометра, в процессе идентификации проводят минимизацию суммарной невязки показаний датчиков при варьировании смещений шкал датчиков углов поворотов платформы и угловых смещений осей поворотов платформы, затем проводят привязку измерительного базиса акселерометров к осям ИИМ, для чего точно определяют ориентацию ИИМ в двух различных положениях относительно вектора ускорения свободного падения, при этом рассматриваемый способ не накладывает ограничений на число и расположение калибруемых акселерометров в составе ИИМ
Недостатком данного способа является необходимость использования специальных устройств для точной регистрации углов поворота платформы, что усложняет конструкцию поворотной установки и методику калибровки.
Известен широкодиапазонный стенд [3]. Стенд содержит поворотную платформу для крепления испытуемого измерителя и подвода к нему питания через кольцевой коллектор, персональную ЭВМ, в слоты которой встроена схема сопряжения с элементами управления испытательными характеристиками платформы и датчиками контролируемых параметров испытуемых измерителей, установленные на платформе охладитель воздуха, термоэлектрический модуль с микровибростолом и универсальную термокамеру.
Недостатком данного стенда являются большие габариты и сложность конструкции, что делает его применение для калибровки микромеханических инерциальных модулей экономически нецелесообразным.
Известен также широкодиапазонный стенд [4] для контроля параметров измерителей угловых скоростей, содержащий платформу для крепления контролируемого измерителя и подвода к нему питания через кольцевой коллектор, персональную ЭВМ, в слоты которой встроена схема сопряжения с элементами управления испытательными характеристиками платформы и датчиками контролируемых параметров испытуемых измерителей, шесть кварцевых маятниковых акселерометров, гироскопический ДУС, два геркона, магнит, механизм отслеживания, суммирующий двухканальный усилитель.
Известен также стенд для контроля прецизионных датчиков угловых скоростей [5], содержащий основание, имеющее возможность вращаться вокруг оси стенда и предназначенное для закрепления на нем контролируемого датчика угловой скорости, имеющего датчик угла, датчик момента, соединенные через усилитель обратной связи, электродвигатель привода стенда, редукцию, коллектор для подвода питания к контролируемому датчику угловой скорости, задатчик эталонного напряжения.
Данные стенды не позволяют без перезакрепления контролировать параметры датчиков, имеющих 2 и более осей чувствительности.
Известен способ калибровки датчиков угловой скорости бесплатформенного ИИМ [6], реализованный в известном широкодиапазонном стенде (например, УПГ-48), обеспечивающем приблизительно горизонтальное задание вектора угловой скорости с фиксированным направлением в пространстве. С помощью стендового оборудования вращают ИИМ последовательно вокруг трех приблизительно ортогональных осей ИИМ. Во время вращения записывают показания ИИМ по каналу акселерометров, показания ДУС. По сигналам акселерометров определяют угловую скорость ИИМ в базисе акселерометров. Идентифицируя математическую модель ДУС, определяют нулевые сигналы ДУС, матрицу, описывающую масштабные коэффициенты, перекрестные связи, ориентацию осей чувствительности ДУС в ИИМ, матрицу, описывающую влияние линейного ускорения на показания ДУС. При этом автоматически обеспечивается привязка осей ДУС к измерительному базису акселерометров.
Недостатками данного способа являются:
- необходимость предварительной калибровки акселерометров и переустановки ИИМ на платформе
- определение вектора угловой скорости вращения ИИМ по сигналам акселерометров посредством формирования разделенной разности оценок углов ориентации ИИМ на соседних тактах их опроса, т.е. численного дифференцирования сигналов акселерометров, что приводит к высокой интенсивности случайной составляющей в формируемых оценках, принимаемых в данном способе калибровки датчиков угловой скорости за входное воздействие. Это значительно ограничивает достижимую точность калибровки.
Известен прецизионный полноповоротный углозадающий стол для испытаний элементов инерциальных приборов [7].
Недостатком данного устройства является невозможность без перезакрепления ИИМ на платформе стенда осуществлять вращение ИИМ вокруг его некомпланарных осей.
Наиболее близким аналогом к заявляемому способу и устройству является способ и устройство калибровки инерциальных измерительных модулей [8]. Здесь способ калибровки ИИМ включает установку ИИМ с блоком записи информации на платформу устройства для калибровки, обеспечивающего задание угловой скорости двигателем вокруг трех приблизительно ортогональных осей (отклонение от ортогональности не должно превышать 5°), связанных с ИИМ, вращение ИИМ вокруг приблизительно горизонтальной оси (отклонение оси вращения от плоскости горизонта не должно превышать 20°) с переменными угловыми скоростями и идентификацию математических моделей ошибок датчиков ИИМ. При этом вращения вокруг трех приблизительно ортогональных осей системы координат, связанной с ИИМ, осуществляются после однократного закрепления ИИМ на платформе устройства, а оценивание составляющих как моделей ошибок ДУС, так и моделей ошибок акселерометров осуществляется на основе сопоставления углов разворота ИИМ по показаниям акселерометров и ДУС в результате единого цикла калибровочных движений. Записанные данные инерциальных датчиков используют для идентификации математических моделей ошибок датчиков ИИМ, в частности постоянных составляющих нулевых сигналов и погрешностей масштабных коэффициентов ДУС и акселерометров, углов отклонения измерительных осей ИИМ от оси вращения устройства для калибровки и коэффициентов g чувствительности ДУС.
Устройство, реализующее данный способ, содержит двигатель, который вращает внешнюю рамку карданового подвеса (КП), фиксатор внутренней рамки, позволяющий устанавливать в определенные угловые положения внутреннюю рамку КП относительно внешней рамки, фиксатор платформы, позволяющий устанавливать в определенные угловые положения платформу относительно внутренней рамки КП. На платформе устройства располагается испытуемый ИИМ с устройством записи информации. Платформа устройства может быть снабжена интерфейсом беспроводной передачи информации.
Недостатком данного способа и устройства является недостаточная точность оцениваемых параметров математических моделей датчиков ИИМ и нарушение работоспособности на малых скоростях вращения платформы в связи:
а) с наличием в сигналах акселерометров составляющих, обусловленных смещением их чувствительных элементов относительно оси вращения платформы - это приводит к смещению оценок нулевых сигналов акселерометров от истинных значений на величины:

где ωх1 - угловая скорость вращения платформы, r2, r3, - смещение чувствительных элементов в перпендикулярных оси вращения направлениях. Что при равномерно нарастающе-убывающей скорости вращения в цикле калибровки определяется по формуле:

где t1 - длительность периода нарастания скорости от 0 до максимальной, сек; ωmax - максимальная задаваемая угловая скорость, °/c.
Для цикла 3-осной калибровки длительностью 30 минут (t1=150 с), диапазоном задаваемых угловых скоростей ±400°/c (ωmax=400°/с) и смещением чувствительного элемента на расстояние 1 см от оси вращения (r2=0.01 м) в соответствии с формулой (2) ΔΔWx2 будет равно:
 ,
,
что в несколько раз больше значения нулевого сигнала при инициализации современных ИИМ (8 mg - ADIS 16385, 3 mg - ADIS 16485).
b) с нестабильностью скорости вращения двигателя при наличии несбалансированности платформы с установленным ИИМ относительно оси вращения.
В соответствии с [1] уравнение работы двигателя постоянного тока с широтно-импульсным управлением имеет вид:

где ψ - потокосцепление якоря, [н⋅м/а], k - максимальное значение питающего двигатель напряжения, [В], sU - коэффициент заполнения сигнала управления, R - сопротивление обмоток двигателя, [Ом], Мс - момент сопротивления на валу двигателя, [H⋅м], J - момент инерции вращаемой двигателем конструкции, приведенный к валу двигателя, [кг⋅м], Ω - угловая скорость вращения вала двигателя, [рад/с].
В установившемся режиме будем иметь

Поскольку ось вращения стенда расположена горизонтально, при наличии несбалансированности вращающейся части момент сопротивления на валу двигателя будет меняться в зависимости от угла поворота вала рамки, что будет приводить к колебаниям угловой скорости вращения вала двигателя синхронно с вращением рамки. Амплитуда колебаний угловой скорости, будет зависеть от m - массы вращающейся части, Δr - расстояния, на которое смещен центр масс, n - передаточного отношения редуктор, R - сопротивления обмоток двигателя, и ψ - потокозацепления якоря в соответствии с выражением:

Например, при использовании двигателя CL1625 (1212) и редуктора Zonhwa 16Р будем иметь:

При этом вариации скорости вращения платформы будут следующие:

что при калибровке ИИМ на малых скоростях вращения платформы  составит порядка 10%. При использовании двигателя меньших габаритов и меньшей стоимости, а значит меньшей мощности, во время калибровки ИИМ на малых скоростях вращения платформы возможно снижение скорости до полной остановки вращения (моменты сил сопротивления в сумме с моментом небаланса превысят вращающий момент).
составит порядка 10%. При использовании двигателя меньших габаритов и меньшей стоимости, а значит меньшей мощности, во время калибровки ИИМ на малых скоростях вращения платформы возможно снижение скорости до полной остановки вращения (моменты сил сопротивления в сумме с моментом небаланса превысят вращающий момент).
Недостатком данного устройства также является нарушение балансировки платформы при установке различных моделей ИИМ с разными весогабаритными параметрами.
Технической проблемой разрабатываемых способа и устройства является недостаточная точность определения калибруемых параметров и обеспечение работоспособности при калибровке ИИМ с разными весогабаритными параметрами.
Техническим результатом для способа и устройства является снижение влияния на точность определения калибруемых параметров ИИМ:
- смещения его чувствительных элементов относительно оси вращения платформы;
- остаточной несбалансированности платформы с закрепленным ИИМ.
Указанный технический результат для способа достигается тем, что в известном способе калибровки ИИМ, включающем закрепление ИИМ на платформе калибровочного стенда с обеспечением совпадения одной из измерительных осей ИИМ с осью вращения двигателя стенда с допустимым отклонением не более 5°, вращение платформы с закрепленным ИИМ с изменяющейся угловой скоростью вокруг 3-х взаимно перпендикулярных осей платформы, запись измеренных датчиками ИИМ проекций угловых скоростей и кажущихся ускорений, оценивание составляющих моделей ошибок датчиков ИИМ, включающих погрешности масштабного коэффициента и нулевые сигналы акселерометров, погрешности масштабного коэффициента, нулевые сигналы и коэффициенты g - чувствительности датчиков угловой скорости, осуществляемое на основе записанных проекций угловых скоростей и кажущихся ускорений дополнительно выполняют:
а) оценивание и компенсацию в сигналах акселерометров составляющих, обусловленных смещением их чувствительных элементов относительно оси вращения платформы;
б) оценивание остаточной несбалансированности платформы с закрепленным ИИМ и введение компенсирующих ее сигналов в контур управления двигателя стенда.
Указанный технический результат для устройства достигается тем, что в известное устройство для калибровки ИИМ, включающее двигатель и платформу с размещенными на ней ИИМ и блоком записи информации, между двигателем и платформой размещен кардановый подвес с внутренней рамой и фиксатором, выполненным с возможностью обеспечения взаимно ортогональных положений внутренней рамки и расположенным на ее оси; между платформой и внутренней рамкой размещен фиксатор платформы, позволяющий устанавливать платформу во взаимно ортогональные положения относительно внутренней рамки дополнительно введено устройство управления двигателем по сигналам гироскопов с учетом оценивания остаточной несбалансированности, позволяющая стабилизировать скорость вращения платформы в широком диапазоне скоростей.
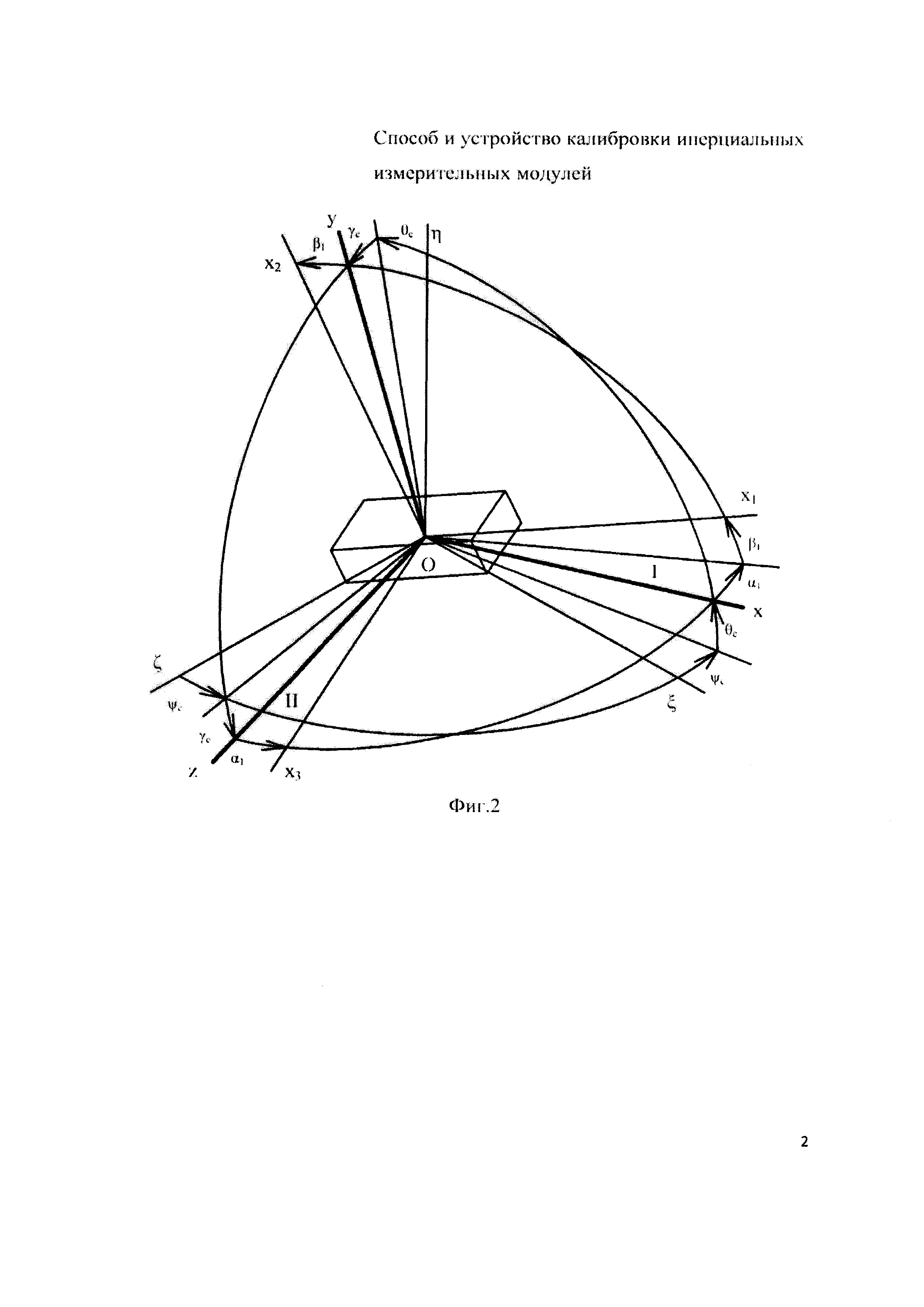
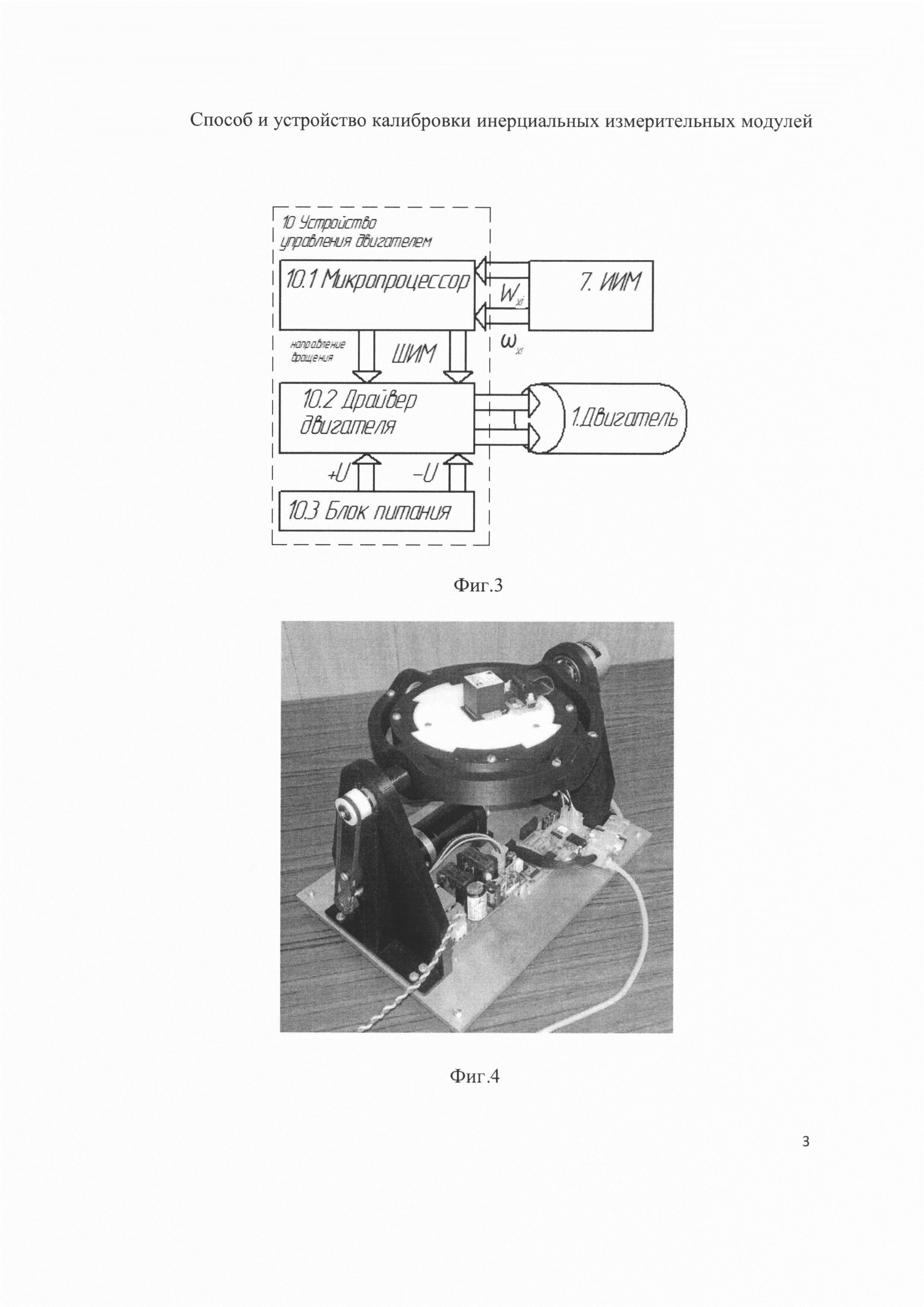
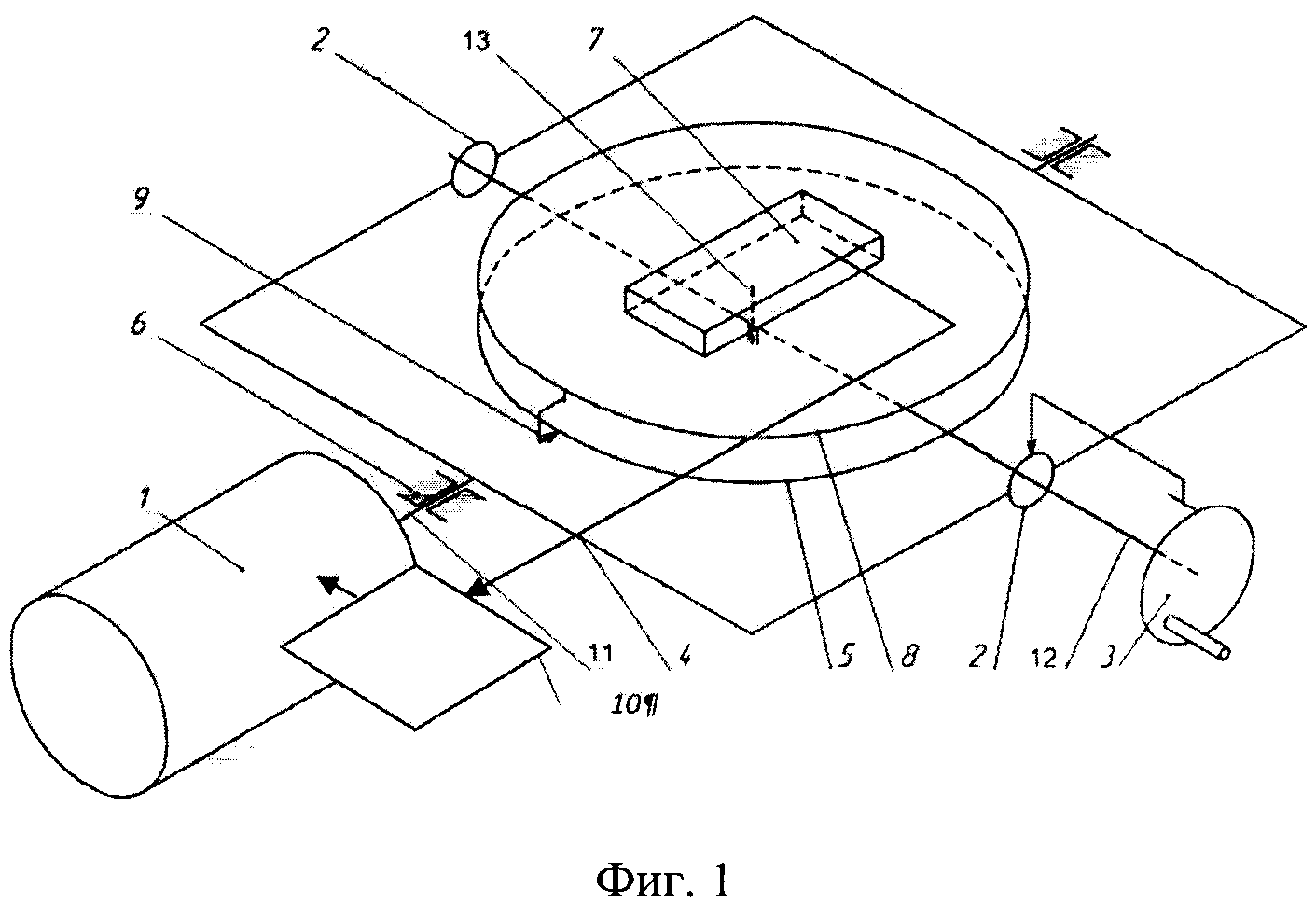
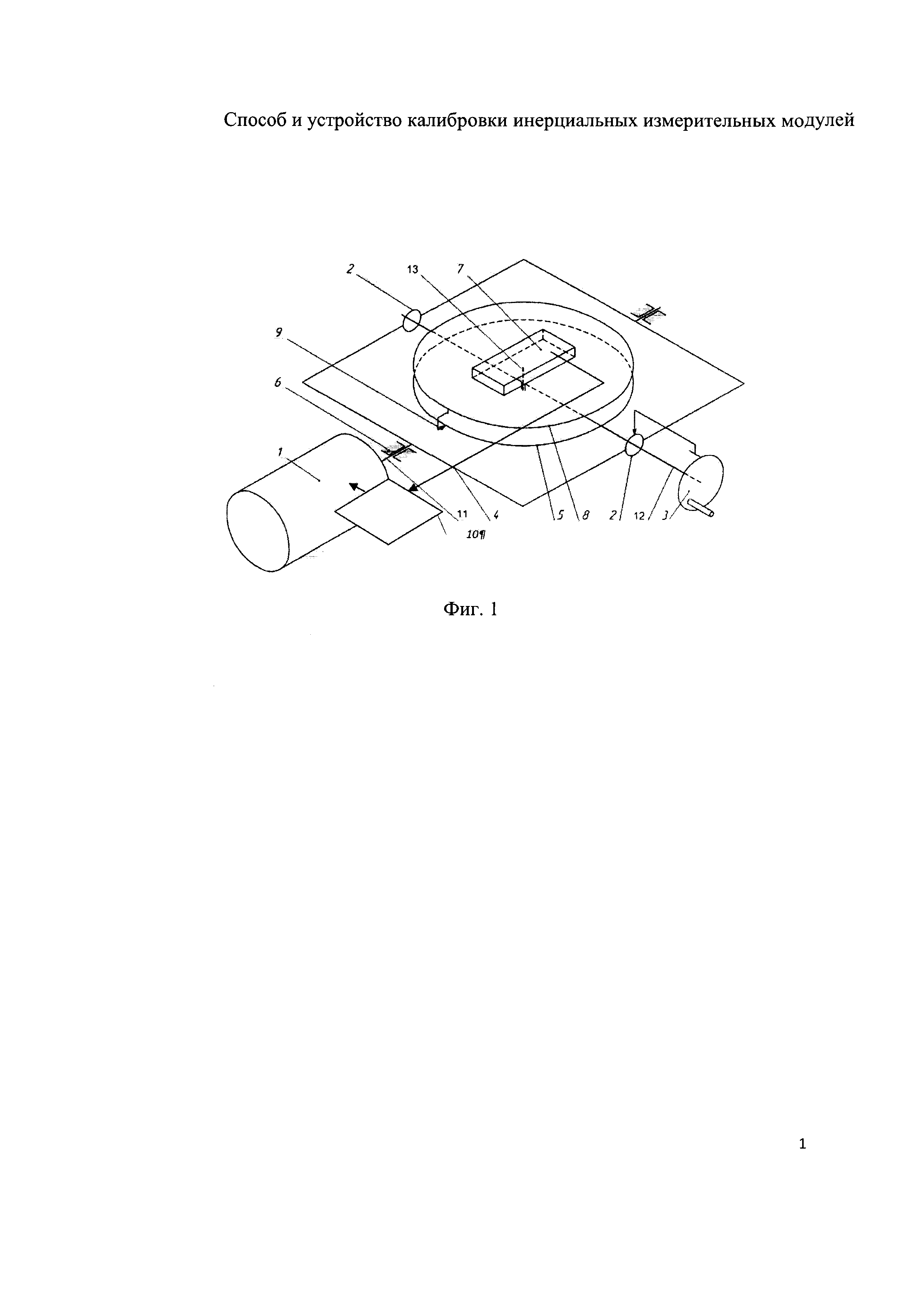
Изобретение поясняется чертежами. На фиг. 1 представлена кинематическая схема устройства, реализующего предлагаемый способ, на фиг. 2 - схема поворотов, на фиг. 3 - функциональная схема варианта реализации устройства управления двигателем, на фиг. 4 - опытный образец предлагаемого устройства.
На чертежах приняты следующие обозначения:
1 - управляемый двигатель,
2 - опоры внутренней рамы 5 КП,
3 - фиксатор внутренней рамы 5 КП,
4 - внешняя рама КП,
5 - внутренняя рама КП,
6 - опоры внешней рамы 4 КП (основание устройства),
7 - ИИМ,
8 - платформа,
9 - фиксатор внешней рамы 4 КП,
10 - устройство управления двигателем по сигналам гироскопов с учетом оценивания остаточной несбалансированности,
11 - ось внешней рамы 4 КП,
12 - ось внутренней рамы 5 КП,
13 - ось платформы 8,
Oξηζ - система координат, связанная с плоскостью горизонта,
Oxyz - «объектовая» система координат, связанная с конструктивными осями устройства для калибровки. Ось Ох совпадает с осью 11 наружной рамы 6 КП. Ось Oz - с осью 12 внутренней рамы 5 КП. Ось Оу перпендикулярна осям Ох и Oz.
Ox1x2x3 - приборная система координат жестко связанная с ИИМ 7.
ψс,θс,γс - углы Эйлера-Крылова, описывающие ориентацию системы координат Oxyz относительно Oξηζ.
α1, β1 - углы погрешностей установки ИИМ, описывающие ориентацию системы координат Оx1x2x3 относительно Oxyz.
Предлагаемое устройство для калибровки содержит двигатель 1, платформу 8, КП, устанавливаемый между двигателем 1 и платформой 8 в опорах 6 и включающий внешнюю раму 4 и внутреннюю раму 5, фиксатор 3 внутренней рамы 5, фиксатор 9 платформы 8. Внешняя рама 4 установлена во внутреннюю раму 5 в опорах 2. На платформе 8 расположен испытуемый ИИМ 7 с устройством записи и беспроводной передачи информации. Устройство 10 управления двигателем по сигналам ИИМ с учетом оценивания остаточной несбалансированности расположено на основании 6 устройства для калибровки и может быть выполнено в виде электронного блока, содержащего микропроцессор, драйвер двигателя и блок питания.
Пример конкретного исполнения устройства управления двигателем поясняется фиг. 3.
Устройство работает следующим образом. Двигатель 1 вращает внешнюю раму 4 КП вокруг оси 11, установленной в опорах 6. Посредством фиксатора 3 внутренней рамы 5 устанавливают внутреннюю рамку 5 КП в положения, при которых ось 13 и ось 11 либо параллельны, либо перпендикулярны друг другу. Посредством фиксатора 9 платформы 8 устанавливают платформу 8 относительно внутренней рамки 5 КП во взаимно ортогональные положения.
Съем информации с испытуемого ИИМ 7 осуществляют либо с помощью блока записи информации, расположенного на платформе 8 устройства для калибровки, либо с помощью интерфейса беспроводной передачи данных. В этом случае передатчик для беспроводной передачи данных размещается на платформе 8 устройства для калибровки, а приемник с блоком записи информации или устройством обработки информации размещается на основании 6 устройства для калибровки или вне его. Подача питания на ИИМ 7 осуществляется либо через скользящие токоподводы, расположенные на валу внешней рамы 4 КП, либо от аккумуляторов, расположенных непосредственно на платформе 8 устройства для калибровки.
Предлагаемый способ калибровки осуществляют следующим образом.
Ось 11 вращения внешней рамки 4 КП располагают приблизительно горизонтально (допустимое отклонение оси 11 вращения внешней рамки 4 КП от плоскости горизонта не должно превышать 20°), что делает возможным использование для измерения угла поворота ИИМ 7 относительно плоскости горизонта сигналов акселерометров испытуемого ИИМ 7. Для этого ИИМ 7 устанавливают на платформу 8 устройства для калибровки таким образом, чтобы ось 11 вращения двигателя 1 совпадала с осью Ox1 с отклонением не более 5°. После этого с помощью двигателя 1 задают вращение ИИМ 7 с изменяемой угловой скоростью. Варьирование угловой скорости вращения обусловлено необходимостью разделения скорости дрейфа и погрешности масштабного коэффициента ДУС, что невозможно в случае постоянной скорости вращения. Отметим, что при выборе диапазона изменения скорости вращения необходимо исходить из диапазона измерения ДУС. Затем платформу 8 с установленным на ней ИИМ 7 поворачивают на 90° относительно оси 13, обеспечивая тем самым совпадение оси Ох3 с осью 11 вращения двигателя 1 с отклонением не более 5° и повторяют цикл вращений. После этого разворачивают внутреннюю раму 5 КП на 90° относительно внешней рамы 4, обеспечивая тем самым совпадение оси Ох2 с осью 11 вращения двигателя 1 с отклонением не более 5° и повторяют цикл вращений. Записывают измеренные при вращении платформы 8 датчиками ИИМ 7 проекции угловых скоростей и кажущихся ускорений на измерительные оси ИИМ 7.
На основе полученных в результате испытаний данных инерциальных датчиков наряду с оцениванием нулевых сигналов и погрешностей масштабных коэффициентов акселерометров и ДУСов, коэффициентов g-чувствительности ДУСов и углов погрешностей установки ИИМ также оценивают в сигналах акселерометров составляющие, обусловленные смещением их чувствительных элементов относительно оси вращения платформы, оценивают остаточную несбалансированность платформы с закрепленным ИИМ и вводят в сигнал устройства 10 управления двигателем 1 компенсирующие ее сигналы.
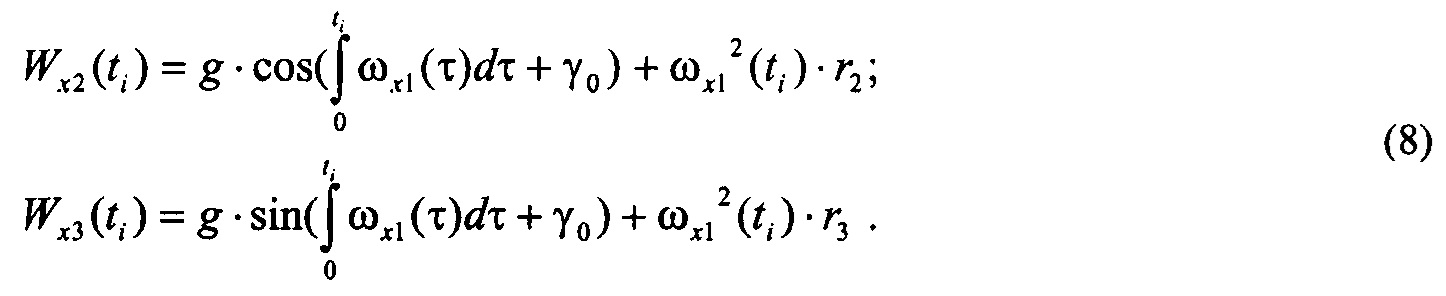
При построении математического аппарата, используемого для получения оценок составляющих математической модели ошибок датчиков ИИМ 7, введено допущение о том, что за период проведения калибровки нестабильность калибруемых параметров не превышает допустимую погрешность. А также учтено, что акселерометры расположены на платформе калибровочного устройства так, что центры масс их чувствительных элементов смещены на расстояние r2 и r3.
В этом случае к составляющим сигналов акселерометров, вызванных ускорением сил тяжести, добавятся составляющие, вызванные центростремительными ускорениями. С учетом их при вращении вокруг оси x1 кажущиеся ускорения по двум другим осям измерительного триэдра будут определяться следующими выражениями:
Проведенные ранее исследования показали, что при калибровке микромеханических ИИМ требуют идентификации следующие параметры:
а) для ИИМ: матрица, описывающая отклонение осей чувствительности инерциальных датчиков от оси вращения (отметим, что погрешность установки модуля на платформу устройства для калибровки на практике значительно превышает взаимную неортогональность осей чувствительности датчиков в ИИМ).

б) для акселерометров: погрешности масштабных коэффициентов δkWj и нулевые сигналы ΔWxj;
с) для ДУС: погрешности масштабных коэффициентов δkωj, постоянные составляющие скоростей дрейфа Δωxj и коэффициенты g-чувствительности Kji.
Математическая модель выходных сигналов акселерометров  в этом случае примет вид:
в этом случае примет вид:

Математическая модель выходных сигналов ДУС  будет иметь вид:
будет иметь вид:

Для обработки данных реализуется 2 типа алгоритмов:
Первый алгоритм основан на методе наименьших квадратов. Позволяет получать точечные оценки составляющих моделей датчиков. Данный алгоритм используется для быстрой калибровки в автоматическом режиме. Для его реализации данные, собранные с датчиков ИИМ 7 подставляются в функции, выведенные в соответствии с методом наименьших квадратов из (2) и (3) при условии вращения ИИМ вокруг оси 11, отклоненной от оси Ox1 на угол не более 5°:





Коэффициенты математических моделей погрешностей датчиков ИИМ (ΔW2, ΔW3, δk2W, δk3W, δkω1, k12, k13, Δωx1, β1, α1, Δωx2, Δωx3, k23, k31, r2, r3), при которых достигается минимум функций (11)-(15) являются искомыми.
Если ИИМ 7 находится в положении, в котором ось Ох2 ИИМ 7 отклонена от оси 11 на угол, не превышающий 5°, то минимизируемые функции получают циклической перестановкой коэффициентов в (11)-(15) 1→2→3→1.
Если ИИМ 7 находится в положении, в котором ось Ох3 ИИМ 7 отклонена от оси 11 на угол, не превышающий 5°, то минимизируемые функции получают циклической перестановкой коэффициентов в (11)-(15) 1→3→2→1.
Второй алгоритм основан на методе оптимальной фильтрации. Позволяет получать временные реализации составляющих моделей датчиков. Данный метод используется при необходимости детального анализа погрешностей датчиков. Для его реализации на основе измеренных датчиками ИИМ 7 проекций угловых скоростей и кажущихся ускорений формируют измерения yj(ti). При условии вращения ИИМ 7 вокруг оси 11, отклоненной от оси Ox1 ИИМ на угол не более 5°, измерения yj(ti) будут иметь вид:


где  ,
,  ,
,  - проекции сигналов акселерометров на оси Оξ, Оη, Oζ после вычитания из них ускорения сил тяжести g. При известной (или вычисленной по сигналам гироскопов и акселерометров ИИМ 7) матрице направляющих косинусов А между осями систем координат Oξηζ и Ox1x2x3 их находят из следующего соотношения.
- проекции сигналов акселерометров на оси Оξ, Оη, Oζ после вычитания из них ускорения сил тяжести g. При известной (или вычисленной по сигналам гироскопов и акселерометров ИИМ 7) матрице направляющих косинусов А между осями систем координат Oξηζ и Ox1x2x3 их находят из следующего соотношения.

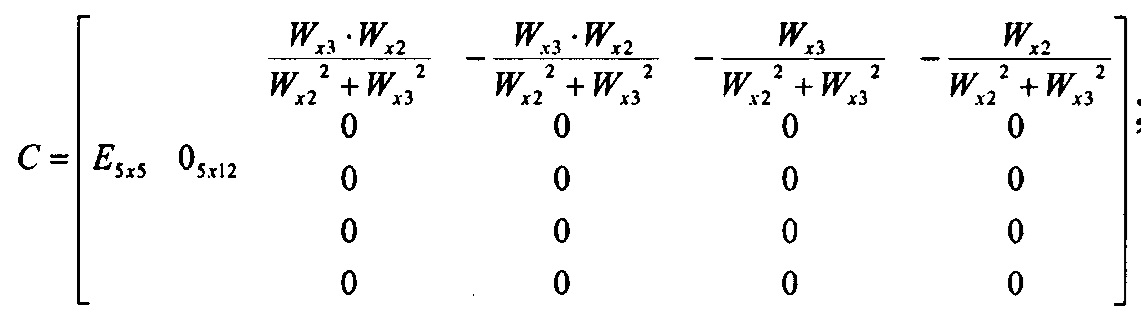
В результате вектор измерения  будет иметь вид:
будет иметь вид:

где C - матрица измерения.
V - вектор шумов измерения;
X - вектор состояния

Для оценивания элементов вектора состояния X по измерениям Y применяется процедура оптимальной фильтрации.
Если ИИМ находится в положении, в котором ось х2 отклонена от оси вращения на угол, не превышающий 5°, то соотношения для алгоритма оценивания элементов вектора состояния получают циклической перестановкой коэффициентов в (16)-(17) 1→2→3→1,
Если ИИМ находится в положении, в котором ось х3 отклонена от оси вращения на угол, не превышающий 5°, то соотношения для алгоритма оценивания элементов вектора состояния получают циклической перестановкой коэффициентов в (16)-(17) 1→3→2→1
Для компенсации остаточной несбалансированности платформы с помощью устройства управления двигатель реализует отрицательную обратную связь по отклонению скорости вращения платформы от заданной в сумме с управляющим сигналом, учитывающим оценки параметров небаланса. Для этого управляющий сигнал двигателя формируют в следующем виде:

где ШИМ(ωx1) - скважность напряжения, сформированного в виде широтно-импульсно модулированного (ШИМ) сигнала;
 - величина скважности напряжения, приводящая к вращению сбалансированного устройства на заданной скорости ωх1, задается, исходя из статической характеристики двигателя;
- величина скважности напряжения, приводящая к вращению сбалансированного устройства на заданной скорости ωх1, задается, исходя из статической характеристики двигателя;
 - амплитуда гармонической составляющей ШИМ, определяемая для каждой задаваемой угловой скорости
- амплитуда гармонической составляющей ШИМ, определяемая для каждой задаваемой угловой скорости  ;
;
γ - угол разворота платформы вокруг оси вращения стенда, вычисляется по показаниям гироскопов и акселерометров;
γнб - сдвиг гармонической составляющей управляющего сигнала двигателя относительно угла разворота платформы, постоянна для одного и того же положения однотипного ИИМ.
Для оценки  и γнб задают
и γнб задают  для каждой угловой скорости, задаваемой на этапе калибровки. Полученные в процессе записи сигналов ИИМ значения угловой скорости
для каждой угловой скорости, задаваемой на этапе калибровки. Полученные в процессе записи сигналов ИИМ значения угловой скорости  и угла
и угла  разворота платформы стенда подставляются в формулу (18)
разворота платформы стенда подставляются в формулу (18)

Коэффициенты 
 , при которых достигается минимум функции (19) являются искомыми. Полученные
, при которых достигается минимум функции (19) являются искомыми. Полученные  и
и  с помощью статической характеристики двигателя пересчитывают в
с помощью статической характеристики двигателя пересчитывают в  и
и  .
.
Применение математического аппарата, построенного на основе метода наименьших квадратов или оптимальной фильтрации, позволяет при обработке собранных во время процедуры быстрой калибровки показаний датчиков ИИМ вычислять составляющие математической модели ошибок ИИМ, в частности, нулевые сигналы и погрешности масштабных коэффициентов ДУС и акселерометров, смещение чувствительных элементов акселерометров относительно оси вращения платформы, коэффициенты g-чувствительности ДУС, ориентацию измерительных осей ИИМ относительно оси вращения и параметры остаточной несбалансированности платформы относительно оси вращения. Затем с помощью устройства управления двигателем компенсируется влияние остаточной несбалансированности платформы на точность оцениваемых параметров ИИМ, что позволяет проводить калибровку ИИМ с разными весо-габаритными параметрами при использовании маломощных и малогабаритных двигателей.
Данным изобретением обеспечивается технологичность калибровки на уровне способов, реализованных с помощью многоосных калибровочных стендов при значительном упрощении конструкции, уменьшении массы и габаритов и значительном снижении стоимости калибровочного оборудования.
Таким образом, использование предлагаемых способа и устройства позволяет повысить точность определения калибруемых параметров и обеспечить работоспособность устройства при калибровке инерциальных модулей с разными весо-габаритными параметрами.
Опытный образец предлагаемого устройства для калибровки создан коллективом ООО «Автоматизированные измерительные системы и технологии» и проходит испытания.
Список использованных источников
1. Пат. US 2014372063 (A1) US, МПК7 G01P 21/00. Quick calibration method for inertial measurement unit/ NIU XIAOJI [CN] и др.; заявитель UNIV WUHAN [CN] - № US 201314239145; заявл. 05.03.2013; опубл. 18.12.2014
2. Пат. 2477864 РФ, МПК7 G01P 21/00. Способ калибровки инерциального измерительного модуля по каналу акселерометров/ Корюкин М.С.; патентообладатель Открытое акционерное общество "Конструкторское Бюро Промышленной Автоматики" (RU) - №2011148861/28; заявл. 30.11.2011; опубл. 20.03.2013, Бюл. №6. - 5 с.: 1 ил.
3. Пат. 2162230 РФ, МПК7 G01P 21/00. Широкодиапазонный стенд для контроля бесплатформенных инерциальных измерительных блоков/ Ачильдиев В.М. и др.; заявители и патентообладатели Ачильдиев В.М., Дрофа В.Н., Рублев В.М.. - №2000105697/28; заявл. 13.03.2000; опубл. 20.01.2001, Бюл. №2. - 5 с.: 3 ил.
4. Пат. 2142643 РФ, МПК6 G01P 21/00. Широкодиапазонный стенд для контроля измерителей угловой скорости/ Калихман Л.Я. и др.; заявитель и патентообладатель Производственное объединение "Корпус" - №96114080/28; заявл. 10.07.1996; опубл. 10.12.1999, Бюл. №23. - 12 с.: 6 ил.
5. А.с. 476516 СССР, МКИ G01Р 13/00. 1973 г.
6. Пат. 2447404 РФ, MПK7 G01P 21/00. Способ калибровки датчиков угловой скорости бесплатформенного инерциального измерительного модуля/ Корюкин М.С.; патентообладатель Открытое акционерное общество "Конструкторское Бюро Промышленной Автоматики" (RU) - №2010124735/28; заявл. 16.06.2010; опубл. 10.04.2012, Бюл. №7. - 4 с.: ил
7. Прецизионный полноповоротный углозадающий стол для испытаний элементов инерциальных приборов [Текст]/ Р.В. Емаков [и др.] // XVIII Санкт-Петербургская международная конференция по интегрированным навигационным системам: сб. мат. XVIII междунар. конф. / ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор» - СПб, 2011. - С. 119-123.
8. Пат. 2602736 РФ, MПК7 G01P 21/00. Способ и устройство калибровки инерциальных измерительных модулей / Шорин B.C. и др.; патентообладатель ЗАО "Газприборавтоматикасервис»" (RU), ФГБОУ ВПО Саратовский государственный технический университет имени Гагарина Ю.А. - №2015132392/28; заявл. 03.08.2015; опубл. 20.11.2016, Бюл. №22. - 16 с: 3 ил.
Способ и устройство калибровки инерциальных измерительных модулей
Способ идентификации смещений осевой линии трубопровода

