Результат интеллектуальной деятельности: СПОСОБ ФОТОГРАФИРОВАНИЯ ДЛЯ ИНТЕЛЛЕКТУАЛЬНОГО ЛЕТАТЕЛЬНОГО УСТРОЙСТВА И ИНТЕЛЛЕКТУАЛЬНОЕ ЛЕТАТЕЛЬНОЕ УСТРОЙСТВО
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка основана на и испрашивает приоритет по патентной заявке Китая № 201710049939.0, поданной 23 января 2017 г., полное содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее раскрытие относится к технологиям электронных устройств и, более конкретно, к способу фотографирования для интеллектуального летательного устройства и интеллектуальному летательному устройству.
УРОВЕНЬ ТЕХНИКИ
[0003] С быстро развивающимися технологиями электронных устройств появляются различные интеллектуальные летательные устройства, например безоператорные камеры, которые могут взлетать на большую высоту, чтобы фотографировать сцены и объекты на земле, под управлением устройств, таких как средство удаленного управления.
[0004] Однако, в практических применениях, когда фотографирование проводится с использованием интеллектуального летательного устройства в среде, где присутствует источник света, лучи света, излучаемые от источника света, будут проходить мимо интеллектуального летательного устройства и генерировать проекцию. Например, когда фотографирование проводится с использованием безоператорной камеры в солнечный день, ввиду освещения от солнца проекция безоператорной камеры может генерироваться на земле, и в такой ситуации генерируемая проекция имеет тенденцию оказываться включенной в сфотографированные картинки или видео.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Для того чтобы решить проблемы в соответствующей области техники, настоящее раскрытие обеспечивает способ фотографирования для интеллектуального летательного устройства и интеллектуальное летательное устройство.
[0006] Согласно первому аспекту вариантов осуществления настоящего раскрытия, обеспечен способ фотографирования для интеллектуального летательного устройства. Способ включает в себя этапы, на которых:
[0007] определяют угол источника света, причем угол источника света является углом между текущим направлением луча целевого источника света и вертикальным направлением, причем целевой источник света является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальное направление является направлением, перпендикулярным горизонтальной плоскости;
[0008] согласно углу источника света определяют пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство; и
[0009] выполняют фотографирование на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции.
[0010] Необязательно, определение угла источника света включает в себя любой из этапов, на которых:
[0011] определяют, на основе множества первых предварительно установленных углов, множество интенсивностей света путем использования сконфигурированного датчика света, и определяют первый предварительно установленный угол, соответствующий максимальной интенсивности света, в качестве угла источника света, причем множество первых предварительно установленных углов соответствует множеству интенсивностей света взаимно-однозначным образом; и
[0012] определяют, на основе множества вторых предварительно установленных углов, множество экспозиций, и определяют второй предварительно установленный угол, соответствующий максимальной экспозиции, в качестве угла источника света, причем множество вторых предварительно установленных углов соответствуют множеству экспозиций взаимно-однозначным образом.
[0013] Необязательно, определение пеленга проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, согласно углу источника света, включает в себя этапы, на которых:
[0014] если угол источника света равен нулю, определяют, что проекция на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, находится непосредственно под текущей позицией интеллектуального летательного устройства; и
[0015] если угол источника света не равен нулю, определяют высоту полета, и согласно углу источника света и высоте полета определяют пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, причем высота полета является текущей высотой интеллектуального летательного устройства от горизонтальной плоскости.
[0016] Необязательно, выполнение фотографирования на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции включает в себя этапы, на которых:
[0017] на основе текущего угла фотографирования и пеленга проекции определяют, находится ли пеленг проекции внутри диапазона фотографирования;
[0018] если пеленг проекции находится внутри диапазона фотографирования и находится непосредственно под текущей позицией интеллектуального летательного устройства, выполняют фотографирование сверху вниз в вертикальном направлении, чтобы получить сфотографированную картинку;
[0019] путем выполнения предварительно установленного процесса формирования изображения в отношении сфотографированной картинки, определяют размер интеллектуального летательного устройства на сфотографированной картинке;
[0020] на основе размера интеллектуального летательного устройства на сфотографированной картинке и высоты полета определяют угол поворота, который является углом для избегания проекции; и
[0021] выполняют фотографирование на основе угла поворота.
[0022] Необязательно, определение, находится ли пеленг проекции внутри диапазона фотографирования, на основе текущего угла фотографирования и пеленга проекции включает в себя этапы, на которых:
[0023] если пеленг проекции находится внутри диапазона фотографирования и угол источника света не равен нулю, определяют целевое направление согласно пеленгу проекции, причем целевое направление является любым направлением отличным от направления, в котором находится пеленг проекции;
[0024] определяют, из множества предварительно установленных диапазонов проекции, предварительно установленный диапазон проекции с расстоянием проекции, причем расстояние проекции является расстоянием по горизонтали между пеленгом проекции и интеллектуальным летательным устройством;
[0025] определяют, из множества предварительно установленных углов поворота, предварительно установленный угол поворота, соответствующий предварительно установленному диапазону проекции с расстоянием проекции, причем множество предварительно установленных углов поворота соответствует множеству предварительно установленных диапазонов проекции взаимно-однозначным образом;
[0026] причем выполнение фотографирования на основе текущего угла фотографирования и пеленга проекции включает в себя этап, на котором:
[0027] выполняют фотографирование на основе целевого направления и предварительно установленного угла поворота, соответствующего предварительно установленному диапазону проекции с расстоянием проекции.
[0028] Согласно другому аспекту вариантов осуществления настоящего раскрытия, обеспечено интеллектуальное летательное устройство, включающее в себя:
[0029] первый модуль определения, выполненный с возможностью определять угол источника света, причем угол источника света является углом между текущим направлением луча целевого источника света и вертикальным направлением, причем целевой источник света является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальное направление является направлением, перпендикулярным горизонтальной плоскости;
[0030] второй модуль определения, выполненный с возможностью согласно углу источника света, определенному первым модулем определения, определять пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство; и
[0031] модуль фотографирования, выполненный с возможностью выполнять фотографирование на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции, определенного вторым модулем определения.
[0032] Необязательно, первый модуль определения включает в себя:
[0033] первый подмодуль определения, выполненный с возможностью определять на основе множества первых предварительно установленных углов множество интенсивностей света путем использования сконфигурированного датчика света и определять первый предварительно установленный угол, соответствующий максимальной интенсивности света, в качестве угла источника света, причем множество первых предварительно установленных углов соответствует множеству интенсивностей света взаимно-однозначным образом; и
[0034] второй подмодуль определения, выполненный с возможностью определять на основе множества вторых предварительно установленных углов множество экспозиций, и определять второй предварительно установленный угол, соответствующий максимальной экспозиции, в качестве угла источника света, причем множество вторых предварительно установленных углов соответствует множеству экспозиций взаимно-однозначным образом.
[0035] Необязательно, второй модуль определения включает в себя:
[0036] третий подмодуль определения, выполненный с возможностью, если угол источника света равен нулю, определять, что проекция на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, находится непосредственно под текущей позицией интеллектуального летательного устройства; и
[0037] четвертый подмодуль определения, выполненный с возможностью, если угол источника света не равен нулю, определять высоту полета, и согласно углу источника света и высоте полета определять пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, причем высота полета является текущей высотой интеллектуального летательного устройства от горизонтальной плоскости.
[0038] Необязательно, модуль фотографирования включает в себя:
[0039] подмодуль определения, выполненный с возможностью на основе текущего угла фотографирования и пеленга проекции определять, находится ли пеленг проекции внутри диапазона фотографирования;
[0040] первый подмодуль фотографирования, выполненный с возможностью, если пеленг проекции находится внутри диапазона фотографирования и находится непосредственно под текущей позицией интеллектуального летательного устройства, выполнять фотографирование сверху вниз в вертикальном направлении, чтобы получить сфотографированную картинку;
[0041] пятый подмодуль определения, выполненный с возможностью, путем выполнения предварительно установленного процесса в отношении формирования изображения в отношении сфотографированной картинки, определять размер интеллектуального летательного устройства на сфотографированной картинке;
[0042] шестой подмодуль определения, выполненный с возможностью на основе размера интеллектуального летательного устройства на сфотографированной картинке и высоты полета определять угол поворота, который является углом для избегания проекции; и
[0043] второй подмодуль фотографирования, выполненный с возможностью выполнять фотографирование на основе угла поворота.
[0044] Необязательно, модуль фотографирования дополнительно включает в себя:
[0045] седьмой подмодуль определения, выполненный с возможностью, если пеленг проекции находится внутри диапазона фотографирования и угол источника света не равен нулю, определять целевое направление согласно пеленгу проекции, причем целевое направление является любым направлением отличным от направления, в котором находится пеленг проекции;
[0046] восьмой подмодуль определения, выполненный с возможностью определять из множества предварительно установленных диапазонов проекции предварительно установленный диапазон проекции с расстоянием проекции, причем расстояние проекции является расстоянием по горизонтали между пеленгом проекции и интеллектуальным летательным устройством; и
[0047] девятый подмодуль определения, выполненный с возможностью определять из множества предварительно установленных углов поворота предварительно установленный угол поворота, соответствующий предварительно установленному диапазону проекции с расстоянием проекции, причем множество предварительно установленных углов поворота соответствует множеству предварительно установленных диапазонов проекции взаимно-однозначным образом;
[0048] причем второй подмодуль фотографирования сконфигурирован, чтобы:
[0049] выполнять фотографирование на основе целевого направления и предварительно установленного угла поворота, соответствующего предварительно установленному диапазону проекции с расстоянием проекции.
[0050] Согласно третьему аспекту вариантов осуществления настоящего раскрытия, обеспечено интеллектуальное летательное устройство, включающее в себя:
[0051] процессор; и
[0052] память для хранения инструкций, исполняемых процессором;
[0053] причем процессор сконфигурирован, чтобы:
[0054] определять угол источника света, причем угол источника света является углом между текущим направлением луча целевого источника света и вертикальным направлением, целевой источник света является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальное направление является направлением, перпендикулярным горизонтальной плоскости;
[0055] согласно углу источника света, определять пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство; и
[0056] выполнять фотографирование на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции.
[0057] Технические решения, обеспеченные вариантами осуществления настоящего раскрытия, могут иметь следующие выгодные эффекты:
[0058] Определяется угол между текущим пеленгом целевого источника света, который является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальным направлением; согласно определенному углу может быть определен пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство. Поскольку пеленг проекции определяется, фотографирование может выполняться на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции. Таким образом, технические решения в настоящем раскрытии могут избегать включения проекции в сфотографированные картинки или видео, благодаря чему улучшается качество фотографирования.
[0059] Следует понимать, что и вышеупомянутое общее описание, и последующее подробное описание являются лишь примерными и объяснительными и не ограничивают заявляемое изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0060] Сопроводительные чертежи, которые включены в это техническое описание и составляют его часть, иллюстрируют варианты осуществления в соответствии с изобретением и, вместе с описанием, способствуют объяснению принципов изобретения.
[0061] Фиг.1 изображает блок-схему способа фотографирования для интеллектуального летательного устройства согласно примерному варианту осуществления.
[0062] Фиг.2A изображает блок-схему способа фотографирования для интеллектуального летательного устройства согласно другому примерному варианту осуществления.
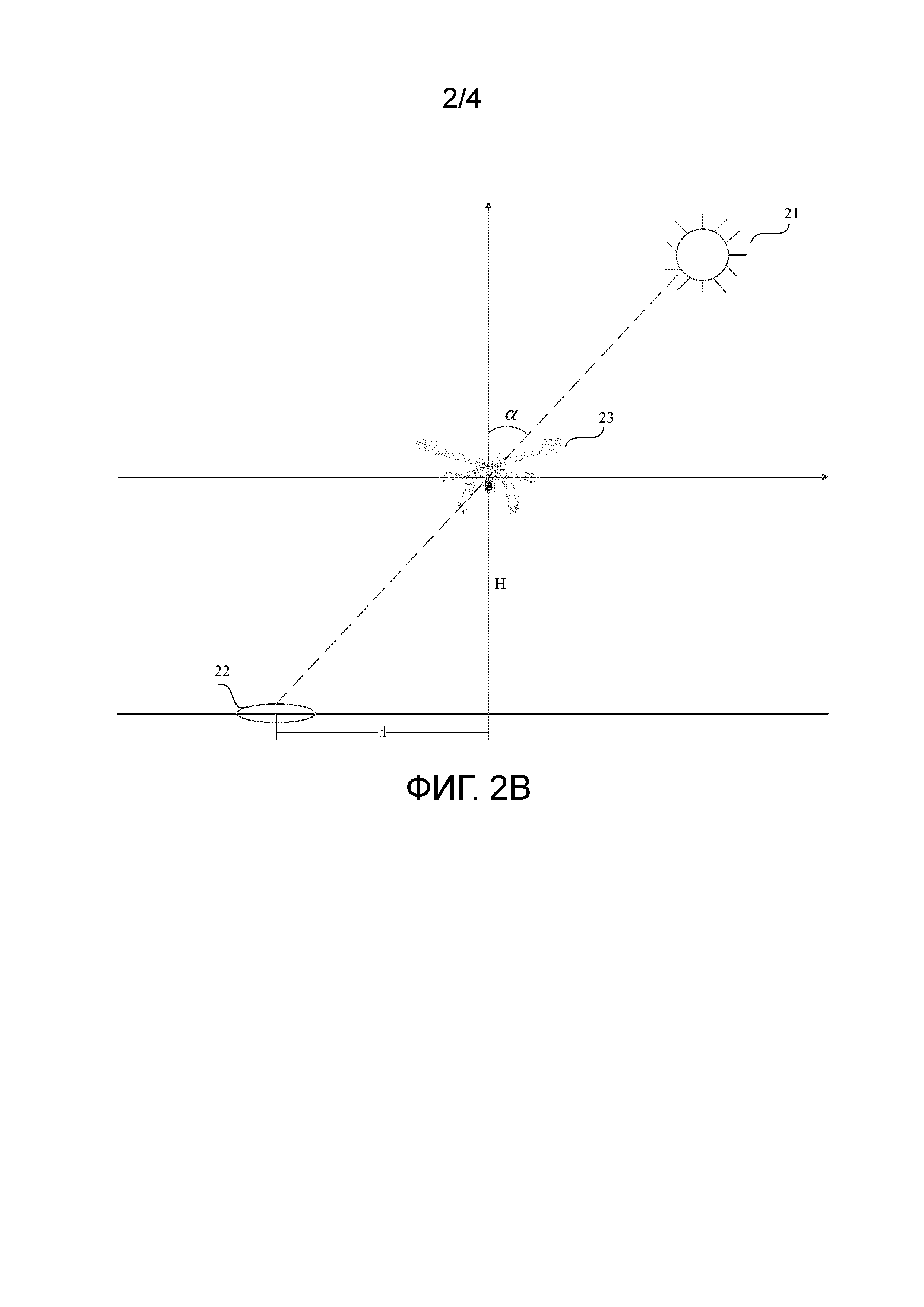
[0063] Фиг.2B изображает схематичное представление, показывающее среду осуществления, задействованную в способе фотографирования для интеллектуального летательного устройства, показанного на фиг.2A.
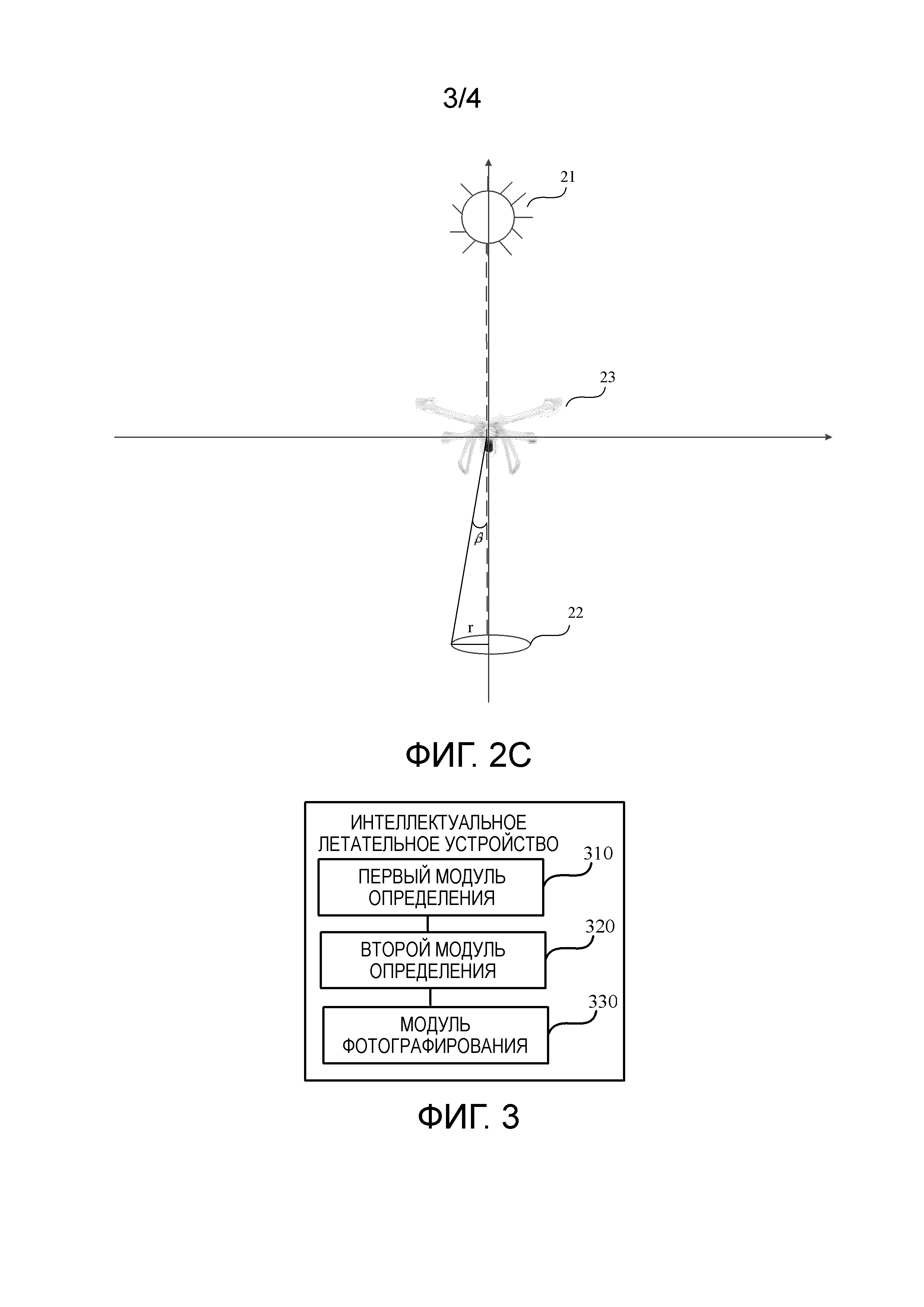
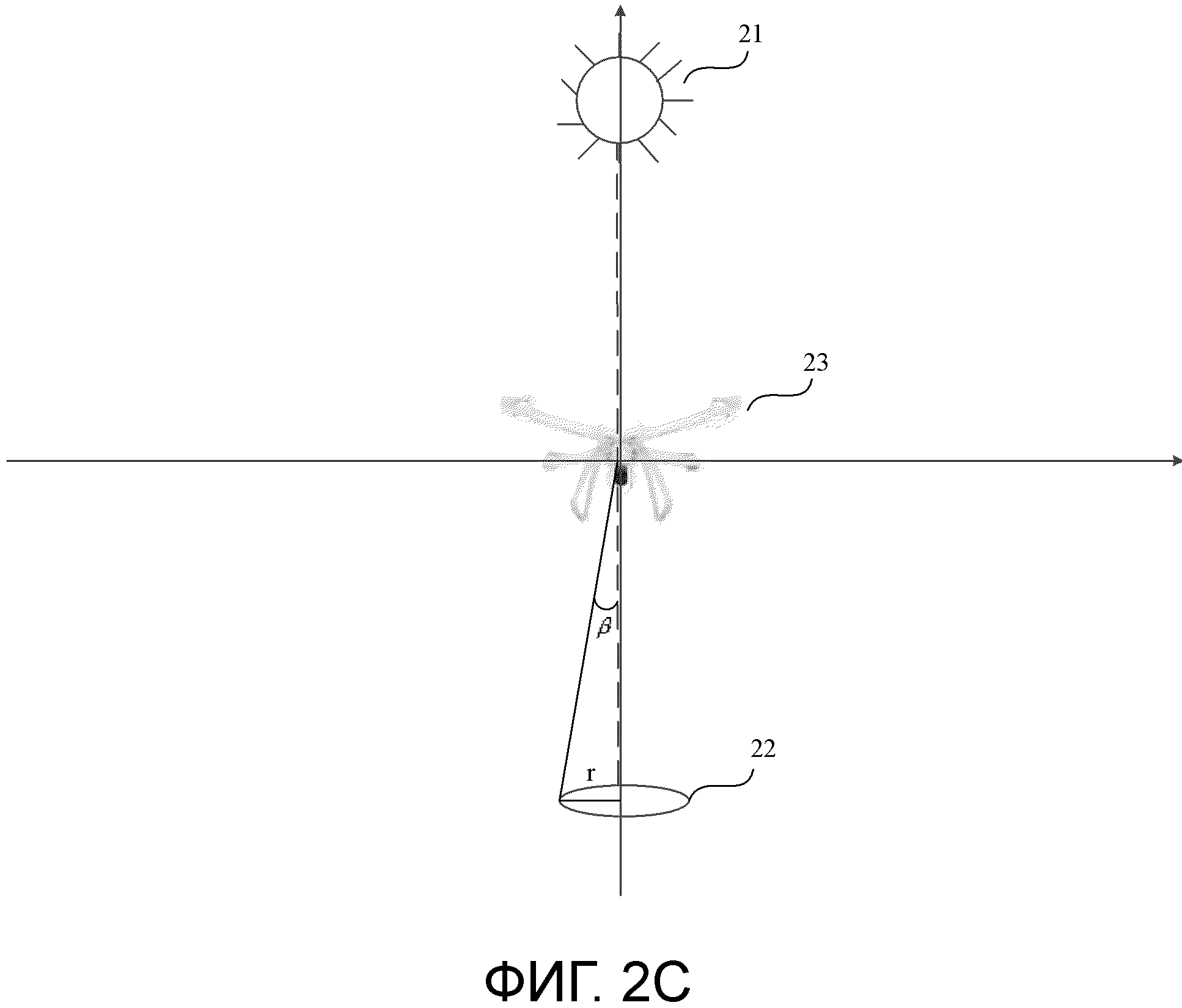
[0064] Фиг.2C изображает схематичное представление, показывающее другую среду осуществления, задействованную в способе фотографирования для интеллектуального летательного устройства, показанного на фиг.2A.
[0065] Фиг.3 изображает структурную схему, показывающую интеллектуальное летательное устройство согласно другому примерному варианту осуществления.
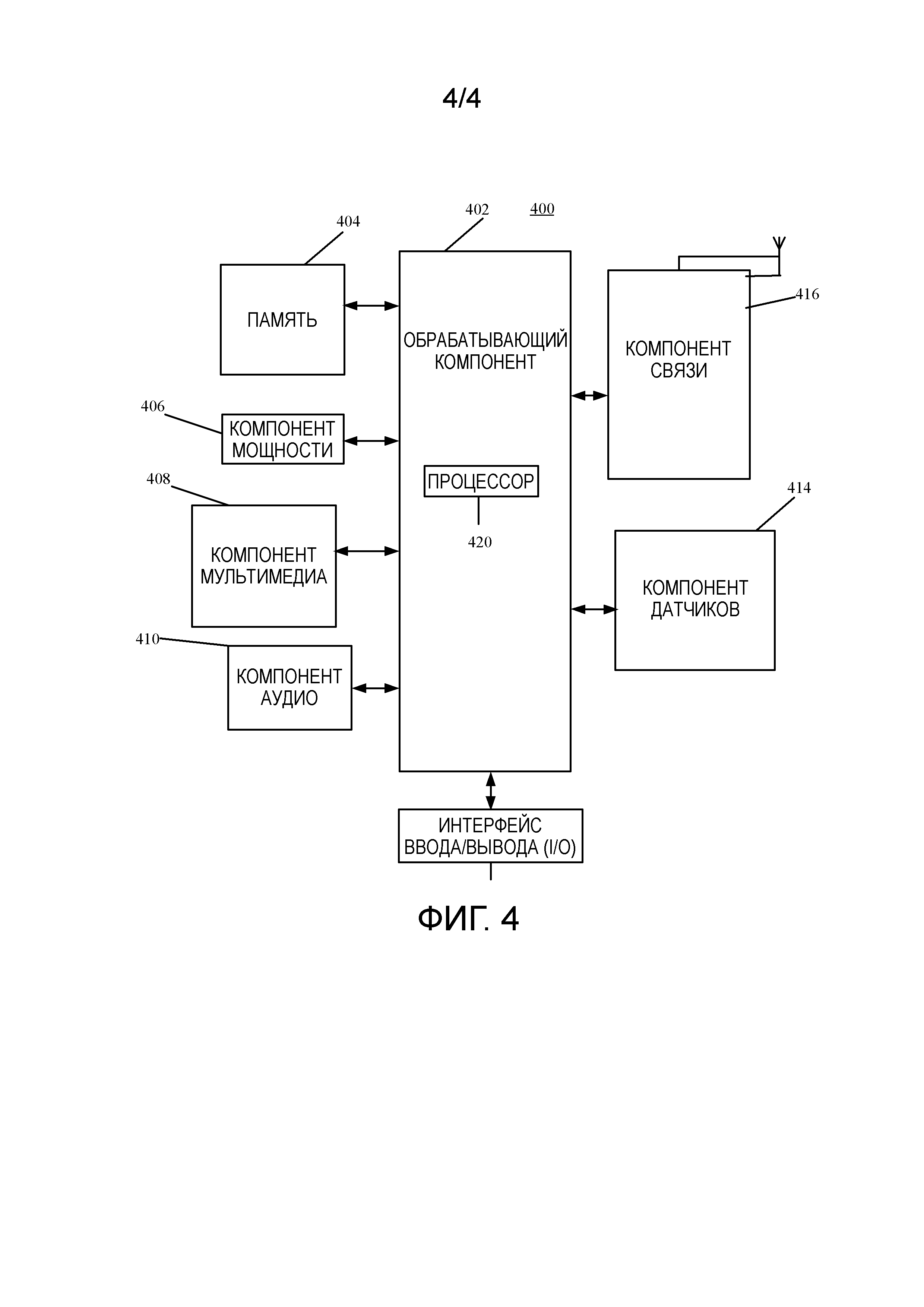
[0066] Фиг.4 изображает структурную схему, показывающую интеллектуальное летательное устройство 400 согласно другому примерному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0067] Теперь будет сделана подробная ссылка на примерные варианты осуществления, примеры которых иллюстрируются на сопроводительных чертежах. Следующее описание ссылается на сопроводительные чертежи, на которых одни и те же номера на различных чертежах представляют одни и те же или подобные элементы, если не указано иное. Реализации, изложенные в следующем описании примерных вариантов осуществления, не представляют все реализации в соответствии с изобретением. Вместо этого они являются лишь примерами устройств и способов в соответствии с аспектами, относящимися к изобретению, изложенному в прилагаемой формуле изобретения.
[0068] Сначала, перед подробным описанием вариантов осуществления настоящего раскрытия будут описаны сценарии применения вариантов осуществления настоящего раскрытия. В соответствующей области техники, когда фотографирование осуществляется с использованием интеллектуального летательного устройства в среде, где присутствует источник света, лучи света, излучаемые от источника света, будут проходить мимо интеллектуального летательного устройства и генерировать проекцию, и при таких условиях генерируемая проекция имеет тенденцию оказываться включенной в сфотографированные картинки или видео, что может влиять на качество фотографирования. Ввиду этого варианты осуществления настоящего раскрытия обеспечивают способ фотографирования для интеллектуального летательного устройства, который имеет возможность избежать включения проекции в сфотографированные картинки или видео и, таким образом, улучшать качество фотографирования. Способ фотографирования для интеллектуального устройства, обеспеченный вариантами осуществления настоящего раскрытия, может исполняться интеллектуальным летательным устройством, которое может быть безоператорной камерой и т. п.
[0069] Фиг.1 изображает блок-схему способа фотографирования для интеллектуального летательного устройства согласно примерному варианту осуществления. Как изображено на фиг.1, фотографирование для интеллектуального летательного устройства может включать в себя следующие этапы.
[0070] На этапе 101 определяется угол источника света. Угол источника света является углом между текущим направлением луча целевого источника света и вертикальным направлением, целевой источник света является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальное направление является направлением, перпендикулярным горизонтальной плоскости.
[0071] На этапе 102 определяется согласно углу источника света пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство.
[0072] На этапе 103 выполняется фотографирование на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции.
[0073] В варианте осуществления настоящего раскрытия определяется угол между текущим пеленгом целевого источника света, который является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальным направлением; согласно определенному углу может быть определен пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство. Поскольку пеленг проекции определяется, фотографирование может выполняться на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции. Таким образом, технические решения в варианте осуществления могут избегать включения проекции в сфотографированные картинки или видео, благодаря чему улучшается качество фотографирования.
[0074] Необязательно, определение угла источника света включает в себя любой из этапов, на которых:
[0075] определяют, на основе множества первых предварительно установленных углов, множество интенсивностей света путем использования сконфигурированного датчика света и определяют первый предварительно установленный угол, соответствующий максимальной интенсивности света, в качестве угла источника света, причем множество первых предварительно установленных углов соответствует множеству интенсивностей света взаимно-однозначным образом; и
[0076] определяют, на основе множества вторых предварительно установленных углов, множество экспозиций, и определяют второй предварительно установленный угол, соответствующий максимальной экспозиции, в качестве угла источника света, причем множество вторых предварительно установленных углов соответствует множеству экспозиций взаимно-однозначным образом.
[0077] Необязательно, определение пеленга проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, согласно углу источника света включает в себя этапы, на которых:
[0078] если угол источника света равен нулю, определяют, что проекция на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, находится непосредственно под текущей позицией интеллектуального летательного устройства; и
[0079] если угол источника света не равен нулю, определяют высоту полета, и согласно углу источника света и высоте полета, определяют пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, причем высота полета является текущей высотой интеллектуального летательного устройства от горизонтальной плоскости.
[0080] Необязательно, выполнение фотографирования на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции включает в себя этапы, на которых:
[0081] на основе текущего угла фотографирования и пеленга проекции определяют, находится ли пеленг проекции внутри диапазона фотографирования;
[0082] если пеленг проекции находится внутри диапазона фотографирования и находится непосредственно под текущей позицией интеллектуального летательного устройства, выполняют фотографирование сверху вниз в вертикальном направлении, чтобы получить сфотографированную картинку;
[0083] путем выполнения предварительно установленного процесса формирования изображения в отношении сфотографированной картинки определяют размер интеллектуального летательного устройства на сфотографированной картинке;
[0084] на основе размера интеллектуального летательного устройства на сфотографированной картинке и высоты полета определяют угол поворота, который является углом для избегания проекции; и
[0085] выполняют фотографирование на основе угла поворота.
[0086] Необязательно, определение, находится ли пеленг проекции внутри диапазона фотографирования, на основе текущего угла фотографирования и пеленга проекции включает в себя этапы, на которых:
[0087] если пеленг проекции находится внутри диапазона фотографирования и угол источника света не равен нулю, определяют целевое направление согласно пеленгу проекции, причем целевое направление является любым направлением отличным от направления, в котором находится пеленг проекции;
[0088] определяют, из множества предварительно установленных диапазонов проекции, предварительно установленный диапазон проекции с расстоянием проекции, причем расстояние проекции является расстоянием по горизонтали между пеленгом проекции и интеллектуальным летательным устройством;
[0089] определяют, из множества предварительно установленных углов поворота, предварительно установленный угол поворота, соответствующий предварительно установленному диапазону проекции с расстоянием проекции, причем множество предварительно установленных углов поворота соответствует множеству предварительно установленных диапазонов проекции взаимно-однозначным образом;
[0090] причем выполнение фотографирования на основе текущего угла фотографирования и пеленга проекции включает в себя этап, на котором:
[0091] выполняют фотографирование на основе целевого направления и предварительно установленного угла поворота, соответствующего предварительно установленному диапазону проекции с расстоянием проекции.
[0092] Все из вышеупомянутых необязательных технических решений могут комбинироваться друг с другом произвольным образом, чтобы составить альтернативный вариант осуществления настоящего раскрытия, и варианты осуществления настоящего раскрытия не имеют целью описать каждый из них отдельно.
[0093] Фиг.2A изображает блок-схему способа фотографирования для интеллектуального летательного устройства согласно другому примерному варианту осуществления. Как изображено на фиг.2A, способ фотографирования для интеллектуального летательного устройства может применяться в интеллектуальном управляющем устройстве. Способ фотографирования для интеллектуального летательного устройства может включать в себя следующие этапы.
[0094] На этапе 201 определяется угол источника света. Угол источника света является углом между текущим направлением луча целевого источника света и вертикальным направлением, целевой источник света является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальное направление является направлением, перпендикулярным горизонтальной плоскости.
[0095] Целевой источник света может включать в себя солнце или осветительное устройство и т. п., и варианты осуществления настоящего раскрытия не накладывают конкретных ограничений на это. Например, со ссылкой на фиг.2B, целевым источником света на фиг.2B является солнце 21, и углом между текущим пеленгом целевого источника 21 света и вертикальным направлением является α, т. е. углом источника света является α. Определение угла источника света может осуществляться путем использования любого из следующих подходов.
[0096] В первом подходе на основе множества первых предварительно установленных углов множество интенсивностей света определяется путем использования сконфигурированного датчика света, и первый предварительно установленный угол, соответствующий максимальной интенсивности света, определяется в качестве угла источника света. Множество первых предварительно установленных углов соответствует множеству интенсивностей света взаимно-однозначным образом.
[0097] Интеллектуальное летательное устройство может быть обеспечено датчиком света. Легко понять, что только когда высота целевого источника света от горизонтальной плоскости больше высоты интеллектуального летательного устройства от горизонтальной плоскости, целевой источник света может генерировать проекцию интеллектуального летательного устройства. Таким образом, в возможной реализации датчик света может быть обеспечен в верхней части интеллектуального летательного устройства и может вращаться для того, чтобы собирать свет, излучаемый от источника света, на основе множества первых предварительно установленных углов.
[0098] Каждый из множества первых предварительно установленных углов может быть установлен пользователями согласно фактическим потребностям или может быть установлен интеллектуальным летательным устройством по умолчанию, и варианты осуществления настоящего не накладывают ограничений на это.
[0099] Например, множеством первых предварительно установленных углов могут быть предварительно установленные углы 30 градусов, 60 градусов, 90 градусов, -30 градусов и -60 градусов относительно вертикального направления. Иначе говоря, интеллектуальное летательное устройство может собирать лучи света с каждых 30 градусов путем использования датчика света, чтобы получить множество интенсивностей света, соответствующих множеству первых предварительно установленных углов.
[00100] Чем выше интенсивность света, тем ближе первый предварительно установленный угол, соответствующий интенсивности света, становится к непосредственному указанию на целевой источник света, т. е. тем ближе первый предварительно установленный угол, соответствующий интенсивности света, подходит к углу между пеленгом целевого источника света и вертикальным направлением. Таким образом, после получения множества интенсивностей света интеллектуальное летательное устройство определяет из множества интенсивностей света максимальную интенсивность света и определяет первый предварительно установленный угол, соответствующий максимальной интенсивности света, в качестве угла источника света.
[00101] Во втором подходе на основе множества вторых предварительно установленных углов определяется множество экспозиций, и второй предварительно установленный угол, соответствующий максимальной экспозиции, определяется в качестве угла источника света. Множество вторых предварительно установленных углов соответствует множеству экспозиций взаимно-однозначным образом.
[00102] В осуществлениях на практике интеллектуальное летательное устройство может собирать лучи света на основе множества вторых предварительно установленных углов посредством устройства камеры интеллектуального летательного устройства, чтобы определять множество экспозиций. Чем выше экспозиция, тем ближе второй предварительно установленный угол, соответствующий экспозиции, подходит к углу между пеленгом целевого источника света и вертикальным направлением. Второй предварительно установленный угол, соответствующий максимальной экспозиции, определяется в качестве угла источника света.
[00103] Каждый из множества первых предварительно установленных углов может быть установлен пользователями согласно фактическим потребностям или может быть установлен интеллектуальным летательным устройством по умолчанию, и варианты осуществления настоящего не накладывают ограничений на это.
[00104] Следует заметить, что два вышеупомянутых подхода для определения угла источника света являются примерными, и в альтернативных вариантах осуществления другие подходы могут быть использованы, чтобы определять угол источника света. Например, любой один из следующих может быть использован.
[00105] В третьем подходе, если целевым источником света является солнце, интеллектуальное летательное устройство определяет информацию позиции, касающуюся текущей позиции интеллектуального летательного устройства, с использованием функции позиционирования и получает момент системного времени; на основе информации позиции и момента системного времени интеллектуальное летательное устройство получает от специализированного сервера угол подъема солнца, соответствующий информации позиции и моменту системного времени. Угол подъема солнца является углом между солнцем и горизонтальной плоскостью, и разница между 90 градусов и углом подъема солнца определяется в качестве угла источника света. Специализированный сервер хранит отношение соответствия моментов системного времени и информации позиции с углами подъема солнца.
[00106] В этом подходе интеллектуальное летательное устройство может определять информацию позиции, касающуюся текущей позиции интеллектуального летательного устройства, и момент системного времени с использованием технологии позиционирования, такой как глобальная система позиционирования (GPS), и затем интеллектуальное летательное устройство отправляет к специализированному серверу запрос на получение угла источника света, который несет информацию позиции и момент системного времени. После приема запроса на получение угла источника света специализированный сервер извлекает из запроса на получение угла источника света информацию позиции и момент системного времени, получает угол подъема солнца, соответствующий информации позиции и моменту системного времени, из предварительно сохраненного отношения соответствия моментов системного времени и информации позиции с углами подъема солнца и отправляет определенный угол подъема солнца интеллектуальному летательному устройству. Поскольку угол подъема солнца может приблизительно полагаться в качестве угла между интеллектуальным летательным устройством и горизонтальной плоскостью, интеллектуальное летательное устройство определяет угол, полученный путем вычитания угла подъема солнца из 90 градусов, в качестве угла источника света.
[00107] В четвертом подходе угол источника света определяется путем захвата проекции объекта, который имеет те же самые габариты, что и интеллектуальное летательное устройство.
[00108] В этом подходе интеллектуальное летательное устройство может фотографировать объект и проекцию объекта. Объект находится внутри одного и того же пространства с интеллектуальным летательным устройством и на одной и той же высоте с интеллектуальным летательным устройством. Интеллектуальное летательное устройство может определять угол источника света согласно проекции объекта и текущей высоте полета интеллектуального летательного устройства. Конкретным образом, определение угла источника света может основываться на теореме Пифагора о треугольнике, и подробные описания будут здесь опущены.
[00109] Следует заметить, что в вышеупомянутых вариантах осуществления угол источника света определяется интеллектуальным летательным устройством, и в альтернативных вариантах осуществления интеллектуальный терминал или "умный" терминал, который ассоциирован с интеллектуальным летательным устройством, может получать угол источника света и затем отправлять угол источника света интеллектуальному летательному устройству, и варианты осуществления настоящего раскрытия не накладывают конкретных ограничений на это.
[00110] На этапе 202 согласно углу источника света определяется пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство.
[00111] В зависимости от угла источника света, пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, может быть определен с использованием следующих подходов.
[00112] В первом подходе, если угол источника света равен нулю, определяется, что проекция на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, находится непосредственно под текущей позицией интеллектуального летательного устройства.
[00113] Со ссылкой на фиг.2C, если угол источника света равен нулю, проекция 22 на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника 21 света, минующего интеллектуальное летательное устройство 23, находится непосредственно под текущей позицией интеллектуального летательного устройства 23.
[00114] Во втором подходе, если угол источника света не равен нулю, определяется высота полета, и согласно углу источника света и высоте полета определяется пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство. Высота полета является текущей высотой интеллектуального летательного устройства от горизонтальной плоскости.
[00115] Со ссылкой на фиг.2B, если высота полета равна H, поскольку угол α источника света известен, пеленг d проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, может быть определен согласно формуле: tanα=d/H.
[00116] В возможной реализации интеллектуальное летательное устройство может определять высоту полета с использованием устройства измерения расстояния, такого как инфракрасный датчик, обеспеченный на интеллектуальном летательном устройстве, и варианты осуществления настоящего раскрытия не накладывают конкретных ограничений на это.
[00117] На этапе 203 фотографирование выполняется на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции.
[00118] В возможной реализации интеллектуальное летательное устройство может определять текущий угол фотографирования посредством датчика угла, обеспеченного на интеллектуальном летательном устройстве. То есть когда устройство камеры интеллектуального летательного устройства поворачивается, угол поворота устройства камеры может быть получен с использованием датчика угла для того, чтобы получить текущий угол фотографирования.
[00119] Затем на основе текущего угла фотографирования и пеленга проекции интеллектуальное летательное устройство определяет, находится ли пеленг проекции внутри диапазона фотографирования.
[00120] В одной возможной реализации определение, находится ли пеленг проекции внутри диапазона фотографирования, может быть осуществлено с использованием следующей процедуры, содержащей этапы, на которых: определяют, является ли направление фотографирования, соответствующее текущему углу фотографирования, тем же самым, что и направление, в котором находится пеленг проекции; если направление фотографирования, соответствующее текущему углу фотографирования, отлично от направления, в котором находится пеленг проекции, определяют, что пеленг проекции не находится внутри диапазона фотографирования; если направление фотографирования, соответствующее текущему углу фотографирования, то же самое, что и направление, в котором находится пеленг проекции, определяют, меньше ли угол между углом фотографирования и вертикальным направлением, чем угол источника света; если угол между углом фотографирования и вертикальным направлением меньше, чем угол источника света, определяют, что пеленг проекции находится внутри диапазона фотографирования; если угол между углом фотографирования и вертикальным направлением больше или равен углу источника света, определяют, что пеленг проекции не находится внутри диапазона фотографирования.
[00121] Например, со ссылкой на фиг.2B, если текущий угол фотографирования находится справа, поскольку пеленг проекции (пеленг проекции находится слева на горизонтальной плоскости) находится напротив направления фотографирования, соответствующего углу фотографирования, очевидно, что пеленг проекции не находится внутри диапазона фотографирования. Наоборот, если направление фотографирования, соответствующее текущему углу фотографирования, является тем же самым, что и пеленг проекции, и угол между текущим углом фотографирования и вертикальным направлением меньше, чем угол источника света, например, если текущий угол фотографирования находится слева и угол между текущим углом фотографирования и вертикальным направлением равен 20 градусов и угол источника света равен 60 градусов, интеллектуальное летательное устройство может определять, что пеленг проекции находится внутри диапазона фотографирования.
[00122] Следует заметить, что в вышеупомянутых вариантах осуществления интеллектуальное летательное устройство определяет, находится ли пеленг проекции внутри диапазона фотографирования, на основе текущего угла фотографирования и пеленга проекции, и в альтернативных вариантах осуществления интеллектуальное летательное устройство может отправлять текущий угол фотографирования и пеленг проекции интеллектуальному устройству, которое ассоциировано с интеллектуальным летательным устройством, например мобильному телефону или интеллектуальному средству удаленного управления, так, чтобы интеллектуальное устройство могло определять, находится ли пеленг проекции внутри диапазона фотографирования, на основе текущего угла фотографирования и пеленга проекции, и варианты осуществления настоящего раскрытия не накладывают конкретных ограничений на это.
[00123] Если пеленг проекции находится внутри диапазона фотографирования, интеллектуальное летательное устройство должно осуществлять фотографирование путем избегания проекции. Конкретные осуществления могут включать в себя любое одно из следующих.
[00124] В первом подходе, если пеленг проекции находится внутри диапазона фотографирования и находится непосредственно под текущей позицией интеллектуального летательного устройства, фотографирование выполняется сверху вниз в вертикальном направлении, чтобы получить сфотографированную картинку; путем выполнения предварительно установленного процесса формирования изображения в отношении сфотографированной картинки определяется размер интеллектуального летательного устройства на сфотографированной картинке; на основе размера интеллектуального летательного устройства на сфотографированной картинке и высоты полета определяется угол поворота, который является углом для избегания проекции; и фотографирование выполняется на основе угла поворота.
[00125] Если пеленг проекции находится непосредственно под текущей позицией интеллектуального летательного устройства, устройство камеры может поворачиваться на конкретный угол, чтобы осуществлять фотографирование путем избегания проекции. Со ссылкой на фиг.2C, если устройство камеры поворачивается на угол β в любом направлении, фотографирование проекции на сфотографированные картинки или видео может избегаться. Таким образом, угол β должен быть определен.
[00126] Соответственно, в варианте осуществления настоящего раскрытия проекция фотографируется, чтобы получить сфотографированную картинку. Поскольку интеллектуальное летательное устройство в общем случае включает в себя множество рук, которые используются для содействия полету, и на основе такого признака круговая область, где расположена проекция, может быть получена на основе проекции. Как изображено на фиг.2C, интеллектуальное летательное устройство может выполнять предварительно установленный процесс формирования изображения в отношении сфотографированной картинки, чтобы определять размер интеллектуального летательного устройства на сфотографированной картинке, и, таким образом, радиус r круговой области на сфотографированной картинке, где находится интеллектуальное летательное устройство, может быть получен. Далее на основе радиуса r, высоты полета H и tanβ=r/H интеллектуальное летательное устройство может определять вышеупомянутый угол поворота β.
[00127] Следует заметить, что радиус r и высота полета могут быть в различных единицах измерения, и, таким образом, в осуществлениях на практике может требоваться преобразование единиц измерения, и подробные описания здесь опускаются.
[00128] Вышеупомянутый предварительно установленный процесс формирования изображения может включать в себя такие процессы, как нормализация изображения или сканирование пиксельных точек и т. п., и варианты осуществления настоящего раскрытия не накладывают конкретных ограничений на это.
[00129] Во втором подходе, если пеленг проекции находится внутри диапазона фотографирования и угол источника света не равен нулю, целевое направление определяется согласно пеленгу проекции; целевое направление является любым направлением отличным от направления, в котором находится пеленг проекции; из множества предварительно установленных диапазонов проекции определяется предварительно установленный диапазон проекции с расстоянием проекции, и расстояние проекции является расстоянием по горизонтали между пеленгом проекции и интеллектуальным летательным устройством; из множества предварительно установленных углов поворота определяется предварительно установленный угол поворота, соответствующий предварительно установленному диапазону проекции с расстоянием проекции, и множество предварительно установленных углов поворота соответствует множеству предварительно установленных диапазонов проекции взаимно-однозначным образом; фотографирование выполняется на основе целевого направления и предварительно установленного угла поворота, соответствующего предварительно установленному диапазону проекции с расстоянием проекции.
[00130] Каждый из предварительно установленных диапазонов проекции может быть установлен пользователями согласно фактическим потребностям или может быть установлен интеллектуальным летательным устройством по умолчанию, и варианты осуществления настоящего раскрытия не накладывают конкретных ограничений на это.
[00131] Также каждый из предварительно установленных углов поворота может быть установлен пользователями согласно фактическим потребностям или может быть установлен интеллектуальным летательным устройством по умолчанию, и варианты осуществления настоящего раскрытия не накладывают конкретных ограничений на это.
[00132] Когда пеленг проекции находится внутри диапазона фотографирования и угол источника света не равен нулю, если фотографирование выполняется напрямую, проекция может оказаться сфотографирована на сфотографированных картинках или видео, и, таким образом, угол фотографирования может регулироваться. Со ссылкой на фиг.2B, если пеленг проекции является таким, как указано ссылочным номером 22, устройству камеры необходимо повернуться на предварительно установленный угол поворота в любом направлении отличным от направления, в котором находится пеленг проекции.
[00133] При таком условии угол поворота относится к расстоянию по горизонтали между пеленгом проекции и интеллектуальным летательным устройством. Чем больше расстояние по горизонтали между пеленгом проекции и интеллектуальным летательным устройством, тем меньше будет проекция, формируемая на горизонтальной плоскости, генерируемая движением света от целевого источника света, минующего интеллектуальное летательное устройство. Таким образом, предварительно установленный угол поворота может быть установлен на малое значение, то есть фотографирование проекции на сфотографированных картинках или видео может избегаться путем поворота всего лишь на малый угол. Наоборот, чем меньше расстояние по горизонтали между пеленгом проекции и интеллектуальным летательным устройством, тем больше будет проекция, формируемая на горизонтальной плоскости, генерируемая движением света от целевого источника света, минующего интеллектуальное летательное устройство. Таким образом, для того чтобы избежать проекции при осуществлении фотографирования, необходим относительно большой предварительно установленный угол поворота.
[00134] В возможной реализации взаимно-однозначное отношение соответствия между множеством предварительно установленных диапазонов проекции и множеством предварительно установленных углов поворота может быть определено пользователями согласно большому объему данных испытаний, и взаимно-однозначное отношение соответствия между множеством предварительно установленных диапазонов проекции и множеством предварительно установленных углов поворота может сохраняться в интеллектуальном летательном устройстве.
[00135] Следует заметить, что целевое направление является любым направлением отличным от направления, в котором находится пеленг проекции, и пользователи могут устанавливать целевое направление согласно своим предпочтениям и сохранять целевое направление в ассоциации с учетной записью пользователя; и затем на основе отношения соответствия между целевыми направлениями и учетными записями пользователей интеллектуальное летательное устройство может выбирать целевое направление, соответствующее учетной записи пользователя, и, таким образом, впечатления пользователя могут быть улучшены.
[00136] Дополнительно, в вышеупомянутой реализации, после того как интеллектуальное летательное устройство поворачивается на предварительно установленный угол к целевому направлению, возможно то, что сцены и объекты в пеленге проекции не могут быть сфотографированы. Для того чтобы продолжать фотографирование сцен и объектов в пеленге проекции после того, как интеллектуальное летательное устройство поворачивается на предварительно установленный угол поворота к целевому направлению, путь фотографирования может планироваться согласно пеленгу проекции и целевому направлению. Например, со ссылкой на фиг.2B, если интеллектуальное летательное устройство поворачивается на предварительно установленный угол поворота вправо в горизонтальном направлении, интеллектуальное летательное устройство может лететь влево в горизонтальном направлении. В это время проекция интеллектуального летательного устройства перемещается, поскольку интеллектуальное летательное устройство летит, пеленг проекции перемещается соответственно влево в горизонтальном направлении, и, таким образом, интеллектуальное летательное устройство может фотографировать сцены и объекты в пеленге проекции.
[00137] Следует заметить, что после планирования пути фотографирования интеллектуальное летательное устройство может отправлять путь фотографирования интеллектуальному устройству, такому как мобильный телефон или средство удаленного управления и т. п. После приема пути фотографирования интеллектуальное устройство может представлять путь фотографирования так, чтобы пользователи могли знать следующий путь фотографирования интеллектуального летательного устройства, благодаря чему улучшаются впечатления пользователя.
[00138] В вариантах осуществления настоящего раскрытия определяется угол между текущим пеленгом целевого источника света, который является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальным направлением; согласно определенному углу может быть определен пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство. Поскольку пеленг проекции определяется, фотографирование может выполняться на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции. Таким образом, технические решения в настоящем раскрытии могут избежать включения проекции в сфотографированные картинки или видео, благодаря чему улучшается качество фотографирования.
[00139] Фиг.3 изображает структурную схему интеллектуального летательного устройства согласно другому примерному варианту осуществления. Как изображено на фиг.3, интеллектуальное летательное устройство включает в себя первый модуль 310 определения, второй модуль 320 определения и модуль 330 фотографирования.
[00140] Первый модуль 310 определения сконфигурирован, чтобы определять угол источника света, причем угол источника света является углом между текущим направлением луча целевого источника света и вертикальным направлением, целевой источник света является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальное направление является направлением, перпендикулярным горизонтальной плоскости.
[00141] Второй модуль 320 определения сконфигурирован, чтобы согласно углу источника света, определенному первым модулем 310 определения, определять пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство.
[00142] Модуль 330 фотографирования сконфигурирован, чтобы выполнять фотографирование на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции, определенного вторым модулем 320 определения.
[00143] Необязательно, первый модуль 310 определения включает в себя:
[00144] Первый подмодуль определения, выполненный с возможностью определять на основе множества первых предварительно установленных углов множество интенсивностей света путем использования сконфигурированного датчика света и определять первый предварительно установленный угол, соответствующий максимальной интенсивности света, в качестве угла источника света, причем множество первых предварительно установленных углов соответствует множеству интенсивностей света взаимно-однозначным образом; и
[00145] второй подмодуль определения, выполненный с возможностью определять на основе множества вторых предварительно установленных углов множество экспозиций, и определять второй предварительно установленный угол, соответствующий максимальной экспозиции, в качестве угла источника света, причем множество вторых предварительно установленных углов соответствуют множеству экспозиций взаимно-однозначным образом.
[00146] Необязательно, второй модуль 320 определения включает в себя:
[00147] третий подмодуль определения, выполненный с возможностью, если угол источника света равен нулю, определять, что проекция на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, находится непосредственно под текущей позицией интеллектуального летательного устройства; и
[00148] четвертый подмодуль определения, выполненный с возможностью, если угол источника света не равен нулю, определять высоту полета, и согласно углу источника света и высоте полета определять пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство, причем высота полета является текущей высотой интеллектуального летательного устройства от горизонтальной плоскости.
[00149] Необязательно, модуль 330 фотографирования включает в себя:
[00150] подмодуль определения, выполненный с возможностью на основе текущего угла фотографирования и пеленга проекции определять, находится ли пеленг проекции внутри диапазона фотографирования;
[00151] первый подмодуль фотографирования, выполненный с возможностью, если пеленг проекции находится внутри диапазона фотографирования и находится непосредственно под текущей позицией интеллектуального летательного устройства, выполнять фотографирование сверху вниз в вертикальном направлении, чтобы получить сфотографированную картинку;
[00152] пятый подмодуль определения, выполненный с возможностью путем выполнения предварительно установленного процесса формирования изображения в отношении сфотографированной картинки определять размер интеллектуального летательного устройства на сфотографированной картинке;
[00153] шестой подмодуль определения, выполненный с возможностью на основе размера интеллектуального летательного устройства на сфотографированной картинке и высоты полета определять угол поворота, который является углом для избегания проекции; и
[00154] второй подмодуль фотографирования, выполненный с возможностью выполнять фотографирование на основе угла поворота.
[00155] Необязательно, модуль 330 фотографирования дополнительно включает в себя:
[00156] седьмой подмодуль определения, выполненный с возможностью, если пеленг проекции находится внутри диапазона фотографирования и угол источника света не равен нулю, определять целевое направление согласно пеленгу проекции, причем целевое направление является любым направлением отличным от направления, в котором находится пеленг проекции;
[00157] восьмой подмодуль определения, выполненный с возможностью определять из множества предварительно установленных диапазонов проекции предварительно установленный диапазон проекции с расстоянием проекции, причем расстояние проекции является расстоянием по горизонтали между пеленгом проекции и интеллектуальным летательным устройством; и
[00158] девятый подмодуль определения, выполненный с возможностью определять из множества предварительно установленных углов поворота предварительно установленный угол поворота, соответствующий предварительно установленному диапазону проекции с расстоянием проекции, причем множество предварительно установленных углов поворота соответствует множеству предварительно установленных диапазонов проекции взаимно-однозначным образом;
[00159] второй подмодуль фотографирования сконфигурирован, чтобы:
[00160] выполнять фотографирование на основе целевого направления и предварительно установленного угла поворота, соответствующего предварительно установленному диапазону проекции с расстоянием проекции.
[00161] В варианте осуществления настоящего раскрытия определяется угол между текущим пеленгом целевого источника света, который является источником света с возможностью генерирования проекции интеллектуального летательного устройства, и вертикальным направлением; согласно определенному углу может быть определен пеленг проекции на горизонтальную плоскость, которая генерируется движением света, излучаемого от целевого источника света, минующего интеллектуальное летательное устройство. Поскольку пеленг проекции определяется, фотографирование может выполняться на основе текущего угла фотографирования интеллектуального летательного устройства и пеленга проекции. Таким образом, технические решения в варианте осуществления могут избежать включения проекции в сфотографированные картинки или видео, благодаря чему улучшается качество фотографирования.
[00162] В отношении вариантов осуществления устройства конкретные формы того, как отдельным модулям выполнять операции, можно найти в предыдущих подробных описаниях, касающихся вариантов осуществления способа, и повторные описания здесь опускаются.
[00163] Фиг.4 изображает структурную схему интеллектуального летательного устройства 400 согласно примерному варианту осуществления. Например, интеллектуальное летательное устройство может быть безоператорной камерой и так далее.
[00164] Со ссылкой на фиг.4, интеллектуальное летательное устройство 400 может включать в себя один или несколько из следующих компонентов: обрабатывающий компонент 402, память 404, компонент 406 мощности, компонент 408 мультимедиа, компонент 410 аудио, интерфейс 412 ввода/вывода (I/O), компонент 414 датчиков и компонент 416 связи.
[00165] Обрабатывающий компонент 402 обычно управляет общими операциями интеллектуального летательного устройства 400, такими как операции, ассоциированные с дисплеем, телефонные вызовы, передачи данных, операции камеры и операции записи. Обрабатывающий компонент 402 может включать в себя один или несколько процессоров 420, чтобы исполнять инструкции, чтобы выполнять все или часть этапов в вышеописанных способах. Кроме того, обрабатывающий компонент 402 может включать в себя один или несколько модулей, которые способствуют взаимодействию между обрабатывающим компонентом 402 и другими компонентами. Например, обрабатывающий компонент 402 может включать в себя модуль мультимедиа, чтобы способствовать взаимодействию между компонентом 408 мультимедиа и обрабатывающими компонентом 402.
[00166] Память 404 сконфигурирована, чтобы сохранять различные типы данных, чтобы поддерживать операцию устройства 400. Примеры таких данных включают в себя инструкции для любых приложений или способов, операция которыми осуществляется на интеллектуальном летательном устройстве 400, контактные данные, данные телефонной книги, сообщения, картинки, видео и т. д. Память 404 может осуществляться с использованием любого типа энергозависимых или энергонезависимых устройств памяти или их комбинации, таких как статическая оперативная память (SRAM), электрически стираемая программируемая постоянная память (EEPROM), стираемая программируемая постоянная память (EPROM), программируемая постоянная память (PROM), постоянная память (ROM), магнитная память, флэш-память, магнитный или оптический диск.
[00167] Компонент 406 мощности обеспечивает мощность различным компонентам интеллектуального летательного устройства 400. Компонент 406 мощности может включать в себя систему управления мощностью, один или несколько источников мощности и любые другие компоненты, ассоциированные с генерированием, управлением и распределением мощности в интеллектуальном летательном устройстве 400.
[00168] Компонент 408 мультимедиа включает в себя экран, обеспечивающий выходной интерфейс между интеллектуальным летательным устройством 400 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (LCD) и панель касания (TP). Если экран включает в себя панель касания, экран может быть реализован как экран касания, чтобы принимать входные сигналы от пользователя. Панель касания включает в себя один или несколько датчиков касания, чтобы считывать касания, смахивания и жесты на панели касания. Датчики касания могут не только считывать границу действия касания или смахивания, но также считывать период времени и давление, ассоциированные с касанием или действием смахивания. В некоторых вариантах осуществления компонент 408 мультимедиа включает в себя переднюю камеру и/или заднюю камеру. Передняя камера и/или задняя камера могут принимать внешние данные мультимедиа, в то время как устройство 400 находится в режиме операции, таком как режим фотографирования или режим видео. Каждая из передней камеры и задней камеры может быть системой фиксированных оптических линз или иметь возможность фокусировки и оптического приближения.
[00169] Компонент 410 аудио сконфигурирован, чтобы выводить и/или вводить аудиосигналы. Например, компонент 410 аудио включает в себя микрофон ("MIC"), выполненный с возможностью принимать внешний аудиосигнал, когда интеллектуальное летательное устройство 400 находится в режиме операции, таком как режим вызова, режим записи и режим распознавания голоса. Принятый аудиосигнал может дополнительно сохраняться в памяти 404 или передаваться через компонент 416 связи. В некоторых вариантах осуществления компонент 410 аудио дополнительно включает в себя динамик, чтобы выводить аудиосигналы.
[00170] Интерфейс 412 I/O обеспечивает интерфейс между обрабатывающим компонентом 402 и периферийными модулями интерфейса, такими как клавиатура, щелчковое колесо, кнопки и т. п. Кнопки могут включать в себя, но не ограничиваться, кнопку "домой", кнопку громкости, кнопку запуска и кнопку блокирования.
[00171] Компонент 414 датчиков включает в себя один или несколько датчиков, чтобы обеспечивать оценки статуса различных аспектов интеллектуального летательного устройства 400. Например, компонент 414 датчиков может обнаруживать открытый/закрытый статус интеллектуального летательного устройства 400, относительное позиционирование компонентов, например дисплея и клавиатуры, интеллектуального летательного устройства 400, изменение в позиции устройства 400 или компонента интеллектуального летательного устройства 400, присутствие или отсутствие контакта пользователя с интеллектуальным летательным устройством 400, направление или ускорение/замедление интеллектуального летательного устройства 400 и изменение в температуре интеллектуального летательного устройства 400. Компонент 414 датчиков может включать в себя датчик близости, выполненный с возможностью обнаруживать присутствие объектов поблизости без какого-либо физического контакта. Компонент 414 датчиков может также включать в себя датчик света, такой как датчик изображений CMOS или CCD, для использования в приложениях получения изображения. В некоторых вариантах осуществления компонент 414 датчиков может также включать в себя датчик акселерометра, датчик гироскопа, магнитный датчик, датчик давления или датчик температуры.
[00172] Компонент 416 связи сконфигурирован, чтобы обеспечивать возможность связи, проводным или беспроводным образом, между интеллектуальным летательным устройством 400 и другими устройствами. Интеллектуальное летательное устройство 400 может осуществлять доступ к беспроводной сети на основе стандарта связи, такого как WiFi, 2G или 3G или их комбинации. В одном примерном варианте осуществления компонент 416 связи принимает сигнал широкого вещания или информацию, ассоциированную с широким вещанием, от внешней системы управления широким вещанием через канал широкого вещания. В одном примерном варианте осуществления компонент 416 связи дополнительно включает в себя модуль связи ближнего поля (NFC), чтобы обеспечивать возможность связи ближнего действия. Например, модуль NFC может осуществляться на основе технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), сверхширокополосной (UWB) технологии, технологии Bluetooth (BT) и других технологий.
[00173] В примерных вариантах осуществления интеллектуальное летательное устройство 400 может осуществляться посредством одной или нескольких специализированных интегральных цепей (ASIC), процессоров цифровых сигналов (DSP), цифровых устройств обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), средств управления, микроконтроллеров, микропроцессоров или других электронных компонентов для выполнения вышеописанных способов.
[00174] В примерных вариантах осуществления также обеспечен невременный машиночитаемый носитель данных, включающий в себя инструкции, такой как память 404, включающая в себя инструкции, причем вышеупомянутые инструкции исполняются процессором 420 в интеллектуальном летательном устройстве 400 для выполнения вышеописанных способов. Например, невременный машиночитаемый носитель данных может быть ROM, RAM, CD-ROM, магнитной лентой, гибким диском, оптическим устройством хранения данных и т. п.
[00175] Обеспечен невременный машиночитаемый носитель данных, когда инструкции в носителе данных исполняются процессором интеллектуального летательного устройства 400, интеллектуальное летательное устройство 400 вынуждается выполнять способ фотографирования для интеллектуального летательного устройства, как показано на фиг.1 или 2A.
[00176] Другие варианты осуществления изобретения будут очевидны специалистам в данной области техники из рассмотрения технического описания и применения на практике изобретения, раскрываемого здесь. Эта заявка имеет целью покрыть любые вариации, использования или адаптации изобретения, следующие его общим принципам и включающие в себя такие отступления от настоящего раскрытия, как согласующиеся с известной или привычной практикой в данной области техники. Предполагается, что техническое описание и примеры рассматриваются только в качестве примера, а истинные объем и сущность изобретения указаны следующей формулой.
[00177] Следует понимать, что настоящее изобретение не ограничивается точной конструкцией, которая была описана выше и изображена на сопроводительных чертежах, и что различные модификации и изменения могут быть сделаны без выхода за пределы его объема. Предполагается, что объем изобретения ограничен только прилагаемой формулой изобретения.
Антенна мобильного терминала
Подложка устройства отображения, способ ее изготовления и электронное устройство
Способ и аппаратура для тестирования программного обеспечения головного устройства отображения виртуальной реальности
Способ и устройство для управления состоянием воспроизведения
Способ и устройство для идентификации типа изображения
Способ и устройство для представления значка wi-fi-сигнала и мобильный терминал
Способ поискового вызова, устройство поискового вызова и система поискового вызова
Способ и устройство для доступа к смарт-камере
Способ и устройство для получения объема воды для увлажнителя
Способ и устройство для управления рабочим состоянием
Способ и устройство для обеспечения стационарного состояния балансирующего транспортного средства
Устройство и способ выдачи информации
Способ и устройство для управления прибором для стрижки волос и прибор для стрижки волос
Покупательская тележка, способ оповещения и оповещающее устройство для покупательской тележки
Способ и устройство сканирования и оплаты, используемые в мобильном аппарате

