Результат интеллектуальной деятельности: Система досмотра грузов и транспортных средств, перемещающихся своим ходом, и способ автоматического радиоскопического контроля движущихся объектов для определения зоны радиационного сканирования в системе досмотра
Вид РИД
Изобретение
Область техники
Заявленная группа изобретений относится к области контроля перемещающихся своим ходом транспортных средств и других подвижных объектов и может быть использована для досмотра с целью обнаружения скрытых предметов, веществ и материалов для обеспечения безопасности и надежности контроля.
Уровень техники
Известно большое количество способов, предназначенных для досмотра транспортных средств. Наибольшее распространение для решения такой задачи получили способы, основанные на применении ионизирующего излучения [1-4]. Среди этих способов самое широкое применение получили способы с использованием рентгеновского сканера [2].
Кроме этого, общим и основным недостатком известных способов является невысокая пропускная способность, обычно не более 25-30 единиц в час. Все эти способы используют систему, в которой источник высокоэнергетического излучения, пучок которого объект пересекает в процессе сканирования, система детектирования излучения в плоскости пучка, электронный тракт аналого-цифровых преобразователей и электронная система формирования теневого изображения. В ряде случаев перемещение инспектируемого объекта через плоскость пучка осуществляется либо с помощью специального устройства, входящего в состав системы, либо сама система перемещается в процессе сканирования относительно неподвижно стоящего объекта. Водитель на момент инспекции в таких системах покидает автотранспорт, что приводит к снижению пропускной способности.
Для более быстрого проведения контроля в ряде систем водитель не покидает кабины и все движение объекта осуществляется своим ходом, но в этом случае требуется обеспечение защиты водителя от излучения, что обеспечивается заездом перед началом сканирования автотранспорта на определенную позицию, в которой кабина водителя находится после плоскости пучка излучения. После фиксации данного положения дается команда на старт радиационного излучения и движения автотранспорта, кабина водителя при этом не сканируется. В этих системах достигается более высокая пропускная способность, исчисляемая до 60 единиц в час. Основными недостатками данных систем являются необходимость остановки транспортного средства перед началом сканирования, что существенно снижает пропускную способность, а неизбежная при этом неравномерность движения в процессе сканирования отрицательно сказывается уже и на качестве теневого изображения и, в целом, контроле досмотра.
Известны системы со значительным увеличением пропускной способности (до 200 единиц в час), оборудованных системами автоматического определения момента включения радиационного излучения без остановки транспортного средства, движущегося своим ходом [5-6]. Такие системы содержат автоматическую систему включения радиационного источника, соединенную с рядом датчиков, фиксирующих прохождение частью объекта, не требующей сканирования, зоны радиационного излучения.
Известна наиболее развитая среди известных система [7], наиболее близкая как для заявленной системы досмотра, так и для заявленного способа контроля. В известной системе [7] дополнительно используется устройство, регулирующее частоту импульсов радиационного источника, на основании данных о скорости объекта, полученных с помощью радара, что является важным при формировании теневого изображения, так как инспектируемые объекты при движении своим ходом могут двигаться с различными скоростями.
Основным недостатком известной системы является ограниченность ее применения, поскольку такая система может быть использована применительно только к определенным видам транспортных средств, так как датчики в данной системе фиксируют лишь прохождение зоны излучения заданного, определенного линейного габарита объекта. Таким образом, известная система [7] подходит только к объектам с одинаковыми линейными габаритами зоны, не подвергающейся излучению. К недостаткам данной системы, кроме указанных выше, относится также и недостаточно высокое качестве контроля досмотра, что связано с невозможностью системы учесть при формировании теневого изображения неравномерность движения объекта при прохождении им зоны радиационного сканирования, поскольку система фиксирует скорость перемещения объекта только на подходе инспектируемого объекта к зоне облучения и поэтому это сказывается на формировании теневого изображения.
Другим недостатком известной системы является ограниченность ее применения, поскольку такая система может быть использована применительно только к определенным видам транспортных средств, которые имеют зазор между кабиной и контейнером.
Сущность изобретения
Заявленная группа изобретений (система досмотра и способ контроля) свободна от указанных недостатков.
Техническим результатом заявленной группы изобретений является повышение быстродействия и пропускной способности инспектируемых объектов, а также повышение безопасности и надежности системы досмотра и контроля.
Указанный технический результат является единым для заявленной группы изобретений (т.е. для системы досмотра и способа контроля).
Указанный технический результат достигается тем, что в системе досмотра грузов и транспортных средств, перемещающихся своим ходом, содержащей источник радиационного излучения с коллиматором, устройство управления источником радиационного излучения, портал с вертикальной и горизонтальной консолями установленными на них детекторами излучения, причем вертикальные и горизонтальные детекторные консоли соединены между собой и расположены на стороне портала, противоположной источнику радиационного излучения, электронный тракт аналого-цифровых преобразователей (АЦП), электронное устройство формирования теневого изображения, которое соединено с детекторами через тракт АЦП, в соответствии с заявленным изобретением, устройство управления источником радиационного излучения выполнено с использованием лазерных сканеров, один из которых расположен от зоны излучения на расстоянии, не менее длины максимально допустимого порталом габарита инспектируемого объекта в направлении его движения, и с разверткой луча в горизонтальной плоскости, другой лазерный сканер размещен в непосредственной близости от зоны облучения и с разверткой луча в вертикальной плоскости, соединенного с лазерными сканерами контроллера положения инспектируемого объекта по отношению к зоне облучения, определения части инспектируемого объекта, не подлежащей облучению, и включения-выключения источника излучения, контроллер соединен с электронным устройством формирования теневого изображения.
Кроме того, указанный технический результат достигается тем, что устройство управления источником радиационного излучения выполнено с использованием не менее двух лазерных сканеров.
Помимо того, указанный технический результат достигается тем, что устройство управления источником радиационного излучения дополнительно содержит лазерный сканер с разверткой луча в горизонтальной плоскости, установленный на другой высоте по отношению к лазерному сканеру по п. 1.
Кроме этого, указанный технический результат достигается тем, что устройство управления источником радиационного излучения содержит не менее двух лазерных сканеров с разверткой луча в горизонтальной плоскости, расположенные на разных высотах по отношению друг к другу.
Вместе с тем, указанный технический результат достигается тем, что в качестве лазерного сканера используют лазерную измерительную систему (LMS) с углом сканирования 0-180°, с частотой сканирования 100 Гц и с угловой дискретностью измерения 1°.
Помимо того, указанный технический результат достигается тем, что в качестве лазерного сканера используют LMS фирмы Sick.
Кроме того, указанный технический результат достигается тем, что электронное устройство формирования теневого изображения соединено с контроллером лазерного сканера.
Указанный технический результат достигается также заявленным способом автоматического радиоскопического контроля движущихся объектов и зоны радиационного сканирования, заключающимся во включении источника излучения при въезде инспектируемого объекта в зону облучения и при прохождении его части, не подлежащей облучению, и выключении источника облучения при полном прохождении инспектируемого объекта зоны облучения, в котором, в соответствии с реализуемым на заявленной системе способом, въезд инспектируемого объекта в зону облучения определяют лазерным сканированием в горизонтальной плоскости области пространства на въезде инспектируемого объекта, перемещающегося своим ходом, в зону его облучения, зону объекта, не подлежащей облучению определяют по наличию зазора между кабиной водителя и контейнером инспектируемого объекта путем лазерного сканирования в вертикальной плоскости перед зоной облучения, а по полученным результатам лазерных сканирований, поступивших на контроллер, фиксируют въезд инспектируемого объекта в зону облучения, а также прохождение его части, не подлежащей облучению, и его полный проезд зоны облучения.
Кроме того, указанный технический результат достигается тем, что зазор между кабиной водителя и контейнером инспектируемого объекта определяют по площади профиля инспектируемого объекта, полученной по результатам лазерного сканирования в вертикальной плоскости.
Помимо этого, указанный технический результат достигается тем, что с помощью лазерного сканирования в вертикальной плоскости перед зоной облучения анализируется средняя высота верхней части инспектируемого объекта и при неизменности этой высоты на длине инспектируемого объекта более двух метров, определяют начало прохождения контейнера с грузом перед зоной облучения.
Кроме этого, указанный технический результат достигается тем, что лазерный сканер в вертикальной плоскости располагается на таком же расстоянии перед зоной облучения, что и длинна анализа неизменности средней высоты инспектируемого объект, то есть два метра.
Указанный технический результат достигается также заявленным способом формирования теневого изображения инспектируемого объекта, заключающемся в формировании числовой матрицы изображения по данным системы детектирования излучения, которую используют для визуального получения теневого изображения, в которой в соответствии с реализуемым на заявленной системе способом, при формировании числовой матрицы изображения дополнительно используют данные о положении инспектируемого объекта, полученных от лазерных сканеров, на основании которых производят вычисление соответствия относительного положения инспектируемого объекта и откликов детекторов, после чего производят пересчет данных, полученных с детекторов, в последовательность откликов, соответствующих одинаковому перемещению инспектируемого объекта между ними.
Помимо того, указанный технический результат достигается тем, что вычисление соответствия относительного положения инспектируемого объекта и откликов детекторов, и пересчет данных, полученных с детекторов, в последовательность откликов, соответствующих одинаковому перемещению инспектируемого объекта между ними, осуществляют путем интерполяции с использованием значений частот лазерного и радиационного сканирований.
Описание заявленного изобретения
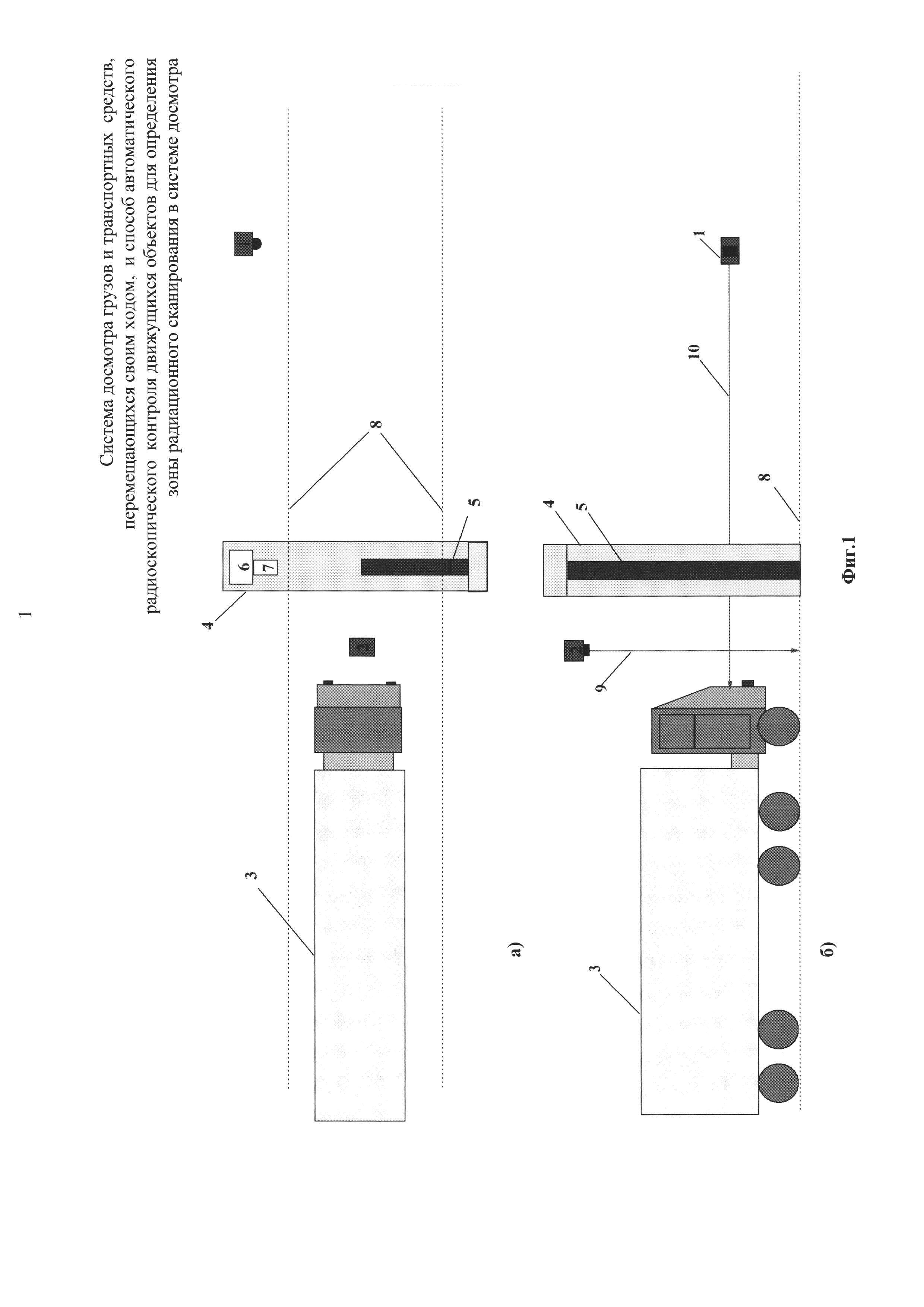
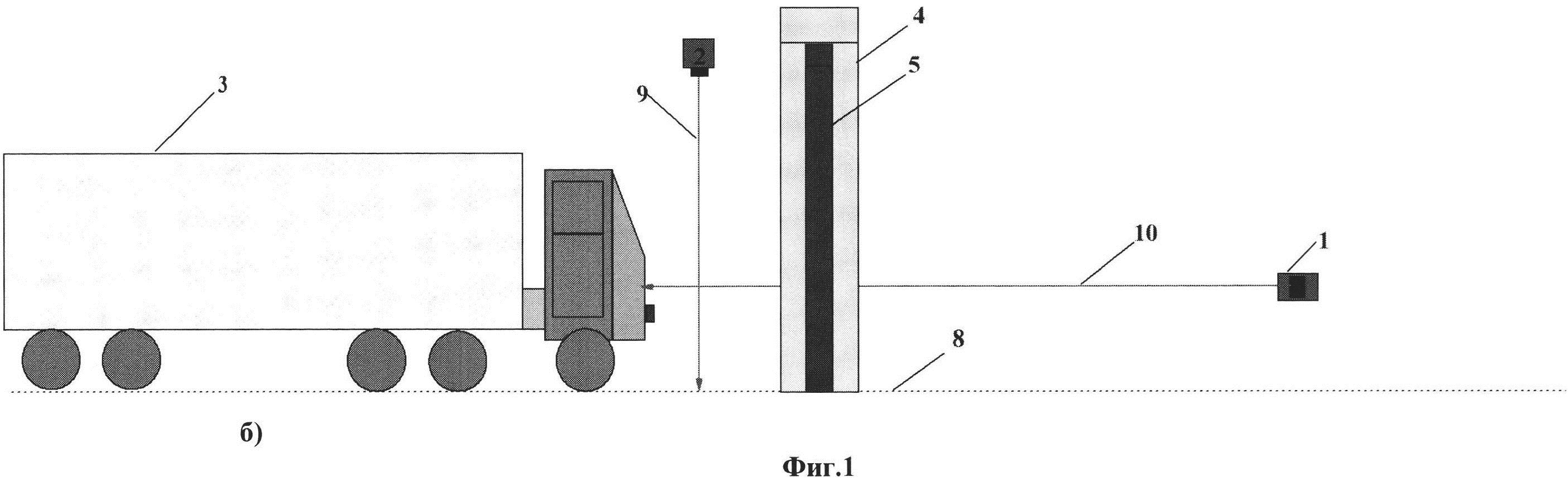
Сущность заявленного изобретения поясняется Фиг. 1 - Фиг. 4, на которых представлена система радиоскопического контроля движущихся объектов. При этом взаимное расположение основных элементов системы и положение инспектируемого объекта при его подъезде к зоне радиационного досмотра показано на Фиг. 1 (Фиг. 1а - вид сверху; Фиг. 1б - вид сбоку).
На Фиг. 1апредставлены портал (4) с источником радиационного излучения (6) и коллиматором (7), которые располагаются сбоку проездной трассы (8), система детекторов излучения (5), расположенных напротив источника излучения (6) с другой стороны трассы. На Фиг. 1а, б первый лазерный сканер (1)со сканированием луча в горизонтальной плоскости (10) установлен сбоку проездной трассы (8) за порталом (4) и на расстояние от него, превышающее максимально допустимый габарит инспектируемого объекта (3) в направлении движения, который используется для определения скорости инспектируемого объекта (3), второй лазерный сканер (2) со сканированием в вертикальной плоскости (9) поперек проездной трассы (8), установлен над проездной трассой на расстоянии не менее 2 метров от зоны облучения и служащий для обнаружения части инспектируемого объекта (3), подлежащей облучению и проведению досмотра грузовой части.
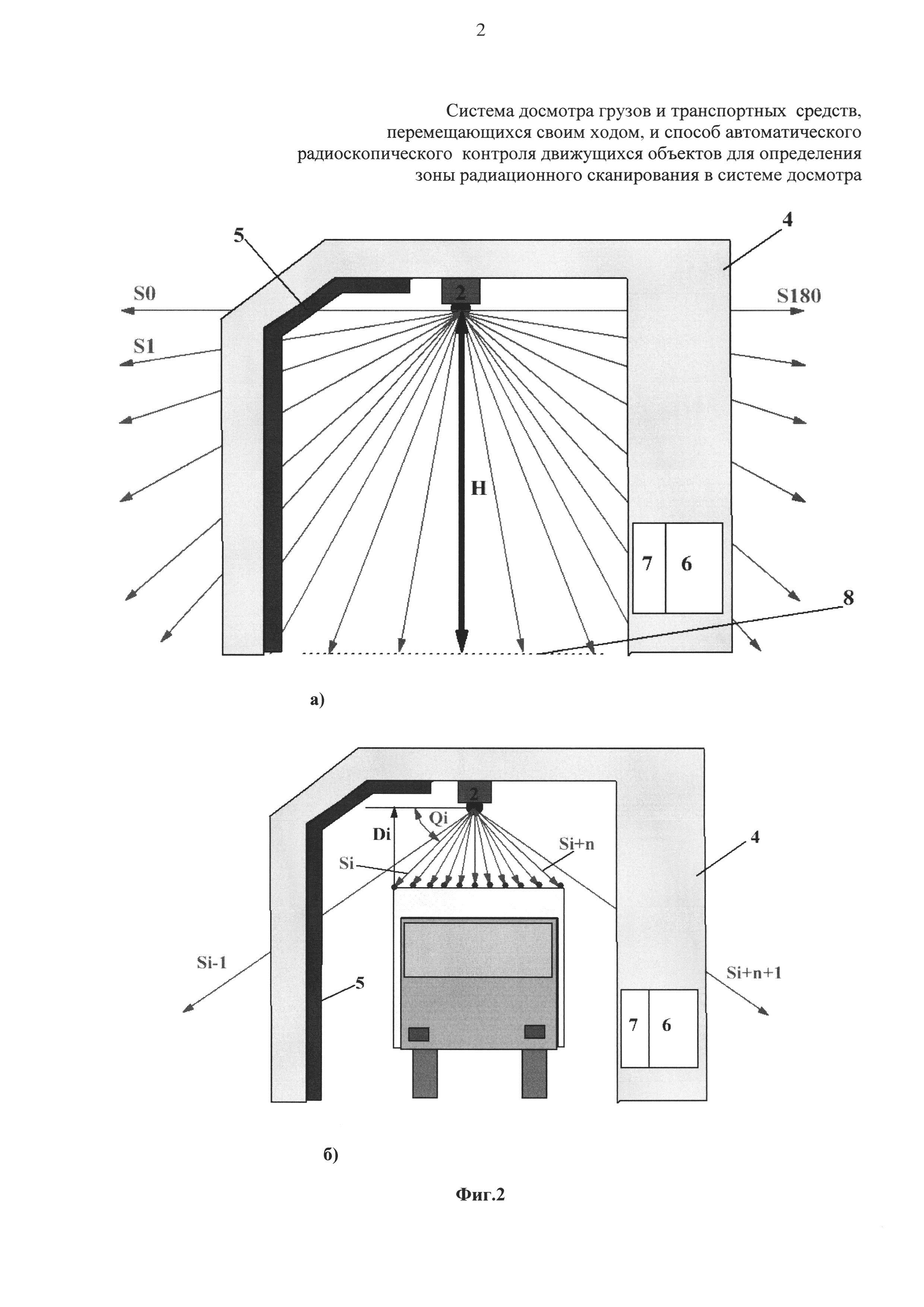
На Фиг. 2а показано, что скан лазерного сканера (2) с разверткой луча в вертикальной плоскости (9), указанной на Фиг. 1б, представляет собой совокупность векторов S0, S1, …, S180 в вертикальной плоскости в пределах от 0 до 180 градусов с дискретным шагом в 1 градус. Вектор представляет собой расстояние от сканера до точки отражения луча лазера в метрах и направление в плоскости сканирования в градусах. За используемое в расчетах расстояние Н между лазерным сканером (2) с разверткой луча в вертикальной плоскости и проездной трассой принимается вектор с минимальным значением модуля вектора Si, измеряемого в условиях отсутствия инспектируемого объекта. Полученный с помощью лазерного сканера (2) с разверткой луча в вертикальной плоскости массив данных со значениями модулей и направлений распространения всех векторов за один цикл измерения, который составляет 10 миллисекунд при частоте сканирования 100 Гц, посредством телеграмм (для LMS фирмы «SICK» при угле сканирования 180 градусов размерность массива данных одного скана равно 720 байт) по интерфейсу RS-422 или Ehternet передаются лазерным сканером в контроллер (11) (Фиг. 3), где происходит обработка и анализ этих данных. По такому же принципу и с такой же частотой санирования работает и лазерный сканер (1) с разверткой луча в горизонтальной плоскости.
На Фиг. 2а, б показано, как определяют используемое в дальнейших расчетах значение среднего расстояния Dm от лазерного сканера (2) с разверткой луча в вертикальной плоскости до профиля верхней части транспортного средства. В контроллере происходит анализ поступающих данных от сканера (2) с разверткой луча в вертикальной плоскости таким образом, что отбрасываются вектора со значением модуля вектора большем, чем значение расстояния Н. Например, вектора от S0 до Si-1 и от Si+n+1 до S180 будут отброшены, так как их значения больше, чем значение расстояния Н. А вектора от Si до Si+n имеют значения меньшее, чем значение расстояния Н. Эти вектора определяют профиль верхней части транспортного средства. Затем для каждой точки профиля «i» определяют расстояние по перпендикуляру до лазерного сканера с разверткой луча в вертикальной плоскости по соотношению:
Di=Si*cos(Qi),
где Di - расстояние от каждой точки профиля «i» до лазерного сканера с разверткой луча в вертикальной плоскости,
Si - величина вектора скана для этой точки профиля, измеренная лазерным сканером с разверткой луча в вертикальной плоскости,
Qi - угол вектора скана точки профиля.
Среднее расстояние Dm от профиля верхней части транспортного средства до лазерного сканера с разверткой луча в вертикальной плоскости определяют как среднеарифметическое значение расстояний от Di до Di+n.
Точно так же определяют используемое при расчетах скорости транспортного средства значение среднего расстояния от профиля передней части транспортного средства до лазерного сканера (1) с разверткой луча в горизонтальной плоскости (Фиг. 1б). При этом скорость транспортного средства определяется сканером с разверткой луча в горизонтальной плоскости по величине перемещения транспортного средства и времени между предшествующим и последующим сканами лазерного сканера с разверткой луча в горизонтальной плоскости по соотношению:
V=Lg/Tg,
где V - скорость транспортного средства,
Lg - расстояние, на которое переместилось транспортное средство за время между предшествующим и последующим сканами лазерного сканера с разверткой луча в горизонтальной плоскости и которое равно разности средних расстояний от профиля передней части инспектируемого транспортного средства до лазерного сканера с разверткой луча в горизонтальной плоскости при предшествующем и последующим сканами этого сканера.
Tg-время между предшествующим и последующим сканами лазерного сканера с разверткой луча в горизонтальной плоскости и оно равно величине, обратной частоте сканирования этого сканера.
В заявленном изобретении принцип определения начала контейнера перед зоной источника радиационного излучения (Фиг. 1б) основан на том, что высота верхней части контейнера инспектируемого объекта (3) представляет собой неизменную величину при прохождении транспортного средства в плоскости сканирования (Фиг. 2б) лазерного сканера (2) с разверткой луча в вертикальной плоскости. Поэтому неизменность средней высоты профиля верхней части транспортного средства на протяжении более двух метров является критерием для определения начала контейнера и момента включения источника радиационного излучения (6), указанного на Фиг. 1а. Данный критерий выбрана на основе анализа максимальной длины кабин всех известных транспортных средств, на которые рассчитана настоящая система досмотра грузов и транспортных средств, перемещающихся своим ходом. На это же расстояние, то есть на расстояние, не менее двух метров до портала с консолями перед источником радиационного излучения по ходу движения инспектируемого объекта, Фиг. 1а, располагают лазерный сканер (2) с разверткой луча в вертикальной плоскости для того, чтобы начало контейнера оказалось как раз перед источником радиационного излучения (6) к моменту включения этого источника.
Для определения плоской верхней части транспортного средства при каждом сканировании Фиг. 2а, б контролируют значение средней высоты Нm транспортного средства над проездной трассой (8), которая определяется по разности:
Hm=Н - Dm,
где Н - расстояние между лазерным сканером (2) с разверткой луча в вертикальной плоскости и проездной трассой (8),
Dm - среднее расстояние от профиля верхней части транспортного средства до лазерного сканера (2) с разверткой луча в вертикальной плоскости.
Плоская верхняя часть транспортного средства будет фиксироваться с момента, когда средняя высота Нm в текущем скане станет больше нуля, что интерпретируется как появление транспортного средства в плоскости сканирования лазерного сканера (2) с разверткой луча в вертикальной плоскости. Если средняя высота Нm в следующем скане не равна средней высоте Нm предыдущего скана, то контроллер остается в режиме мониторинга и не генерирует управляющих сигналов. Когда же средняя высота Нm в следующем скане равна средней высоте Нm предыдущего скана, определяют прошедшее транспортным средством расстояние между предшествующим и последующим сканами лазерного сканера (2) с разверткой луча в вертикальной плоскости по следующей функции:
L=V*Tv,
где L - расстояние, на которое переместилось транспортное средство за время между предшествующим и последующим сканами лазерного сканера (2) с разверткой луча в вертикальной плоскости,
V - скорость транспортного средства,
Tv - время между предшествующим и последующим сканами лазерного сканера с разверткой луча в вертикальной плоскости и оно равно величине, обратной частоте сканирования этого сканера. Затем значение расстояния L суммируется в сумматоре контроллера (11), в котором сумма изначально сброшена в ноль. Если выполняется условие равенства средней высоты Hm и в следующем скане, то вновь рассчитанное расстояние L также суммируется в сумматоре. При появлении скана, у которого средняя высота Нm в следующем скане не равна средней высоте Нm предыдущего скана, то сумма в сумматоре сбрасывается в ноль.
Если сумма в сумматоре превысит величину в два метра, критерий для досмотра инспектируемого объекта будет считаться выполненным и контроллер (11) Фиг. 3 направляет сигнал для включения источника радиационного излучения как раз к моменту входа передней части контейнера в зону облучения, после чего контроллер (11) продолжает обрабатывать данные лазерного сканера (2) с целью определения момента полного прохождения инспектируемым объектом (3) зоны облучения. Когда значение высоты Нm станет равным нулю, контроллер направит команду на выключение источника радиационного излучения (6) после небольшой задержки, необходимой для выхода конца контейнера из зоны облучения.
В дальнейшем происходит ожидание появления в плоскости сканирования лазерного сканера (2) с разверткой луча в вертикальной плоскости следующего транспортного средства (Фиг. 2а).
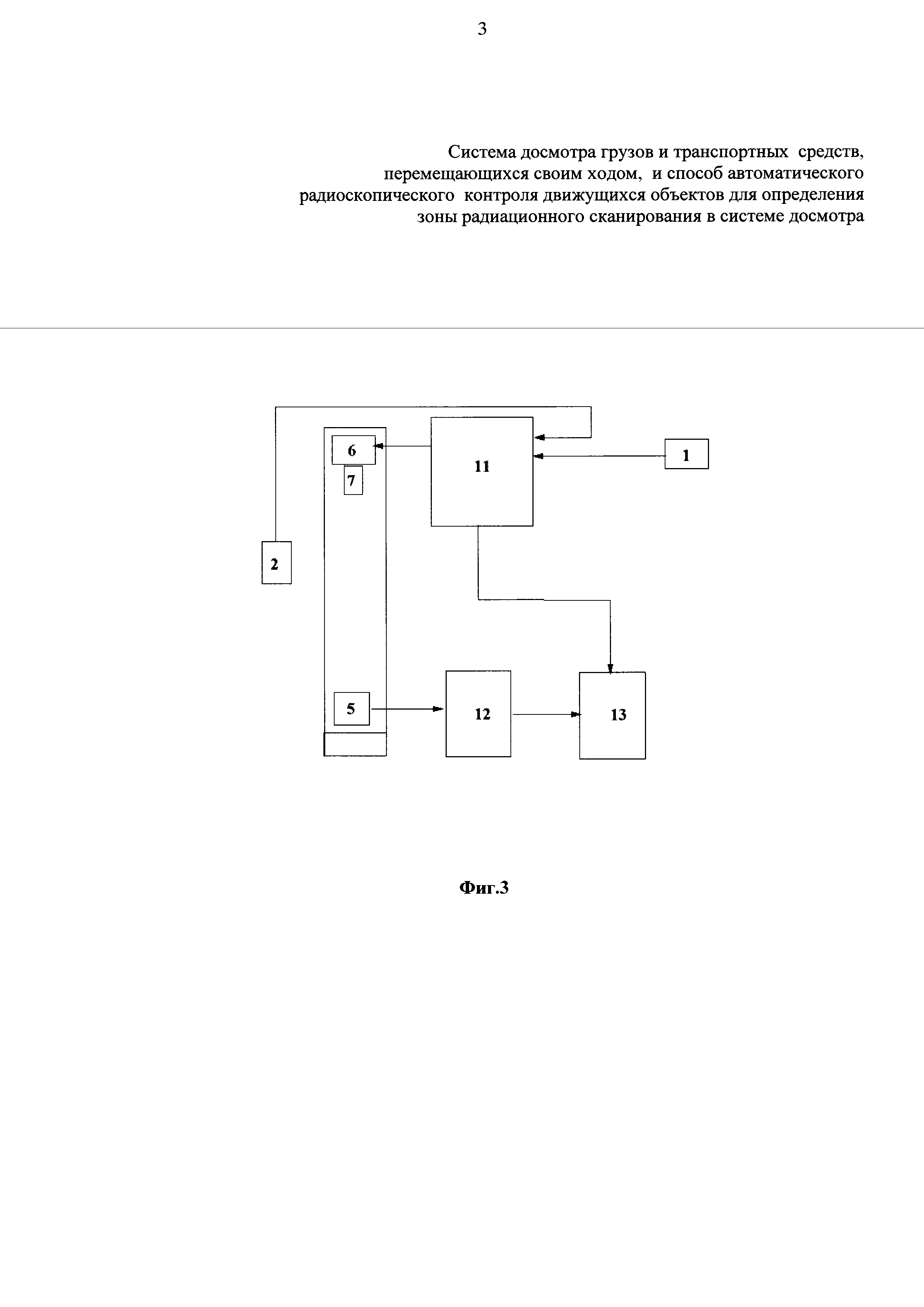
На Фиг. 3. показаны все элементы системы, где система детектирования (5) соединена с электронным трактом аналого-цифрового преобразователя (12) и с электронным устройством формирования теневого изображения (13), к контроллеру (11) подключен лазерный сканер со сканированием луча в горизонтальной плоскости (1) и лазерный сканер со сканированием в вертикальной плоскости (2), а также подключен источник радиационного излучения (6) с коллиматором (7).
В качестве первого (1) и второго (2) лазерных сканеров возможно использование лазерной измерительной системы LMS фирмы «SICK». Для этой системы характерны высокая скорость сканирования и высокая точность определения расстояния до объектов.
Принцип работы LMS фирмы «SICK» основан на времени измерения пролета луча, который проходит через вращающееся зеркало и, отражаясь от объекта, возвращается обратно в фотоприемник сканера. Расстояние до объекта определяется измерением времени распространения луча в пространстве. Благодаря вращающемуся зеркалу измерение расстояния до объектов осуществляется в одной плоскости.
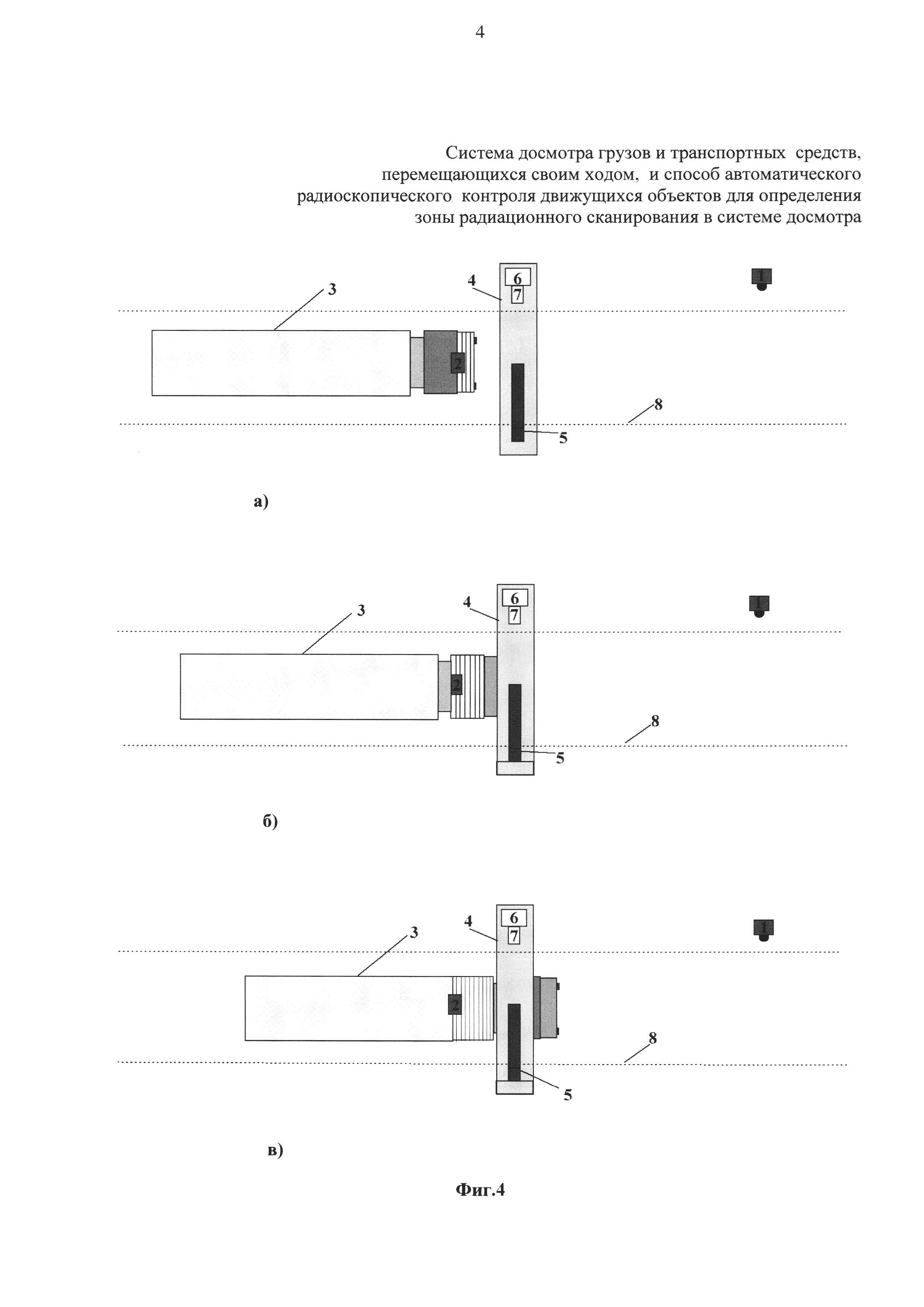
На Фиг. 4 показаны примеры определения момента включения источника радиационного излучения. На Фиг. 4а в плоскости сканирования лазерного сканера (2) с разверткой луча в вертикальной плоскости проходит передняя часть кабины водителя. При этом средняя высота Нm постоянно меняется (увеличивается) и включение источника радиационного излучения (6) не происходит.
На Фиг. 4б в плоскости сканирования лазерного сканера (2) с разверткой луча в вертикальной плоскости проходит верхняя плоская часть кабины водителя. При этом средняя высота Нm постоянна, но длина этой части кабины меньше двух метров и включение источника радиационного излучения (6) не происходит.
На Фиг. 4в в плоскости сканирования лазерного сканера (2) с разверткой луча в вертикальной плоскости проходит верхняя плоская часть контейнера. При этом средняя высота Нm контейнера постоянна, и как только под лазерным сканером (2) пройдет контейнер длиной два метра, произойдет включение источника радиационного излучения (6).
Заявленная система досмотра грузов и транспортных средств, перемещающихся своим ходом, позволяет учесть неравномерность движения инспектируемого объекта в процессе радиационного сканирования. Это достигается тем, что при построении теневого изображения используются данные о положении инспектируемого объекта (3) (Фиг. 4а-в) относительно плоскости облучения в процессе его сканирования. В процессе радиационного сканирования Фиг. 3, начинающегося с момента включения источника радиационного излучения (6), электронное устройство формирования теневого изображения (13) принимает и буферизует данные от системы детектирования (5) по электронному тракту АЦП (12) и контроллера (11). После окончания радиационного сканирования устройство формирования теневого изображения (13) производит обработку полученных данных и формирует теневое изображения в виде числовой матрицы.
Обработка данных основывается на том факте, что данные, поступающие в электронную систему формирования изображения (13) имеют временную привязку, определяемую частотами радиационного и лазерного сканирований. Таким образом, данные радиационных сканирований (последовательность массивов оцифрованных откликов детекторов) по времени разделены по времени между собой одинаковым промежутком времени, определенным заданной частотой радиационного сканирования. Это позволяет для каждого детектора построить зависимость его отклика от времени, начиная с момента начала радиационного сканирования.
Аналогично, может быть построена временная зависимость Фиг. 4а-в положения инспектируемого объекта (3) исходя из частоты лазерного сканирования, на основе которой строится обратная зависимость - время от положения инспектируемого объекта (3), начиная с момента начала радиационного сканирования. При этом могут быть использованы процедуры сглаживания и интерполяции данных. Результаты такой обработки сводят в массив данных, в котором каждому перемещению инспектируемого объекта (3) на заданное фиксированное расстояние соответствует временная координата. Далее с помощью этих данных, используя методы интерполяции, преобразуют данные откликов детекторов. Для каждого детектора строится новый массив данных, в которых отклик соответствует заданному фиксированному перемещению объекта. Совокупность, преобразованных данных откликов детекторов, формирует числовую матрицу теневого изображения. Описанный алгоритм реализуется электронной системой формирования теневого изображения (13) (Фиг. 3).
Технико-экономическая эффективность заявленной группы изобретений состоит в повышении быстродействия, пропускной способности системы и возможности сканирования транспортных средств без зазора между кабиной и контейнером, а также повышении безопасности, надежности и точности досмотра инспектируемых объектов за счет конструктивного исполнения системы, реализуемого на ее основе способа досмотра, в котором предусмотрено определение зоны, не подлежащей облучению, а также нового способа формирования числовой матрицы теневого изображения и формирования теневого изображения, позволяющего учесть неравномерность движения объекта в процессе радиационного сканирования.
Список использованной литературы
1. HusseinE., 1992; GozaniT., 1997; AnJ. etc, 2003
2. Патент РФ №2284511
3. Патент РФ №2297623
4. Патент РФ №2239821
5. Patent US No. 7,688,945 В2 (RU 2390007)
6. Patent US No. 7,352,844 Bl
7. Patent US No. 7,492,861 B2 (US Appl. No. 2008/0089476 Al; WO 2005/098401) (прототип) (RU 2340006)
Система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, способ автоматического радиоскопического контроля движущихся объектов и зоны радиационного сканирования и способ формирования теневого изображения инспектируемого объекта
Химически модифицированный планарный оптический сенсор, способ его изготовления и способ анализа полиароматических гетероциклических серосодержащих соединений с его помощью
Способ радиоподавления несанкционированного канала космической радиолинии "космический аппарат - земля" и система для его реализации
Способ анализа цитохрома с в интактных митохондриях с помощью спектроскопии гигантского комбинационного рассеивания на наноструктурированных покрытиях
Способ радиоподавления несанкционированных каналов космической радиолинии "космический аппарат - земля" и система для его реализации
Композиция, обладающая гкр-активностью для определения полиароматических гетероциклических серосодержащих соединений в углеводородных продуктах, способ получения композиции, планарный твердофазный оптический сенсор на ее основе и способ его получения, применение сенсора для анализа полиароматических гетероциклических серосодержащих соединений
Планарный твердофазный оптический сенсор для определения белковых соединений методом спектроскопии гигантского комбинационного рассеяния и его применение для детектирования белковых соединений
Система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, способ автоматического радиоскопического контроля движущихся объектов и зоны радиационного сканирования и способ формирования теневого изображения инспектируемого объекта
Способ навигации подвижных объектов и устройство многофункциональной рентгеновской навигационной системы для его реализации

