Результат интеллектуальной деятельности: СИСТЕМА ДИСТАНЦИОННОЙ СВЯЗИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Область техники
Изобретение относится к двигателям для летательных аппаратов и, в частности, к области мониторинга состояния лопастей таких двигателей, заключенных или не заключенных в кожух.
Предшествующий уровень техники
Состояние лопастей двигателей летательного аппарата часто является критическим фактором, который необходимо контролировать, в частности, когда лопасти подвергаются сильным напряжениям, как, например, в случае лопастей, заключенных или не заключенных в кожух, газотурбинных двигателей, таких как турбовинтовые двигатели. Действительно, усталость лопасти может привести к необратимому повреждению двигателя, если ее не предсказать достаточно заблаговременно.
Традиционная технология для такого мониторинга состоит в осуществлении испытаний на прочность при помощи датчиков деформации.
Однако установка таких датчиков деформации является трудоемкой и дорогой, тем более что, как правило, они имеют ограниченный срок службы. Их установка на лопастях эксплуатируемого двигателя является сложной по причине использования систем питания и инструментального контроля на таком вращающемся двигателе. Поэтому используют датчики напряжений с целью контроля лопастей, снятых со ступицы двигателя, в лабораторных условиях, но они не позволяют производить контроль лопасти во время работы в ходе циклов полета непосредственно на двигателе.
Кроме того, другой хорошо известной технологией является определение разности времени между, с одной стороны, интервалом времени, измеряемым между реальными моментами прохождения соответствующих заранее определенных мест по меньшей мере двух последовательных лопастей перед неподвижной контрольной точкой, и, с другой стороны, теоретическим интервалом времени между моментами теоретического прохождения этих мест, вычисляемыми в зависимости от скорости вращения воздушного винта; и отслеживание изменения этой разности в течение времени. Эта технология делает возможным опосредованное определение степени локальной деформации лопасти в заранее определенном месте относительно ее первоначальной формы и/или амплитуды вибраций, которым подвергается это место. На основании этого можно оценить степень усталости лопасти и вычислить ее оставшийся срок службы.
Известно применение этой технологии для дистального (дистального относительно оси двигателя) конца лопасти в качестве контролируемого заранее определенного места этой лопасти. Эта технология известна под своим английским названием «tip timing», которое можно перевести как «хронометраж по концу».
Кроме того, эту технологию обычно применяют при помощи емкостных или магнитных датчиков, расположенных на неподвижной части летательного аппарата и обнаруживающих прохождение контролируемого места лопасти.
Недостатком этой технологии является то, что применяемые емкостные или магнитные датчики имеют чувствительность, быстро уменьшающуюся на расстоянии, отделяющей точку излучения от точки обнаружения сигнала. Следовательно, эта технология может быть применена, только если технология двигателя обеспечивает небольшой промежуток между лопастями и датчиками, установленными на неподвижной части летательного аппарата. Например, для двигателей с открытым ротором (часто называемым на английском языке «open-rotor») или турбовинтовых двигателей очень сложно соблюдать это требование уменьшения промежутка и, следовательно, обеспечивать правильную работу датчиков.
Поэтому существует потребность в реализации мониторинга с менее строгими требованиями применения.
Раскрытие изобретения
Первым объектом изобретения является система дистанционной связи, выполненная с возможностью встраивания в летательный аппарат, при этом указанный летательный аппарат содержит по меньшей мере один винт двигателя с множеством лопастей, выполненный с возможностью вращения относительно неподвижного модуля летательного аппарата вокруг оси двигателя.;
Система содержит оптическое излучающее устройство, выполненное с возможностью излучать, когда система установлена на летательном аппарате, световой пучок, выходящий снаружи винта из по меньшей мере одной излучающей поверхности указанного винта; и оптическое устройство обнаружения светового пучка, содержащее по меньшей мере одну обнаруживающую поверхность, являющуюся чувствительной к световому пучку, и выполненное с возможностью встраивания в неподвижный модуль таким образом, чтобы указанная по меньшей мере одна излучающая поверхность и указанная по меньшей мере одна обнаруживающая поверхность регулярно оказывались напротив и на расстоянии друг от друга, когда винт вращается относительно неподвижного модуля.
Таким образом, световой пучок может распространяться между этой по меньшей мере одной излучающей поверхностью, которая неподвижно соединена с винтом, и указанной по меньшей мере одной обнаруживающей поверхностью, которая неподвижно соединена с неподвижным модулем. Таким образом, эта по меньшей мере одна обнаруживающая поверхность может находиться на расстоянии от винта, и, в частности, от указанной по меньшей мере одной излучающей поверхности. Следовательно, эта по меньшей мере одна обнаруживающая поверхность может быть неподвижной относительно неподвижного модуля, когда винт вращается относительно неподвижного модуля.
Кроме того, для одного и того же заданного промежутка между указанными излучающей и обнаруживающей поверхностями было установлено, что гораздо легче получить мало существенное ослабление для светового пучка, проходящего между указанными поверхностями, чем для емкостных или магнитных сигналов.
Следовательно, применение оптической системы связи с использованием оптических излучающих и обнаруживающих устройств позволяет реализовать мониторинг лопастей, в меньшей степени ограниченный условиями, чем мониторинг в известных решениях.
В частности, можно разделить излучающую поверхность и обнаруживающую поверхность более значительным расстоянием, чем в случае емкостных или магнитных систем, что упрощает осуществление мониторинга на двигателях, технология которых не допускает небольших промежутков между излучающей и обнаруживающей поверхностями, как, например, в двигателе с открытым ротором или в турбовинтовых двигателях.
Согласно некоторым вариантам система может быть выполнена так, что содержит множество расположенных на расстоянии друг от друга обнаруживающих поверхностей.
Таким образом, обнаружение можно осуществлять в нескольких расположенных на расстоянии друг от друга местах. Это позволяет увеличить временное разрешение обнаружения.
Согласно некоторым вариантам система может быть выполнена так, что лопасти винта содержат, каждая, переднюю кромку и заднюю кромку, и указанная по меньшей мере одна излучающая поверхность может быть включена в любую из кромок, выбранных из передней кромки и задней кромки одной из указанных лопастей винта.
Действительно, передняя кромка и задняя кромка представляют собой места лопасти, где во время работы двигателя возникают большие механические напряжения. Поэтому необходимо отслеживать состояние лопасти в одном из этих мест.
Согласно некоторым вариантам система может быть выполнена так, что лопасти винта имеют, каждая, дистальный конец относительно оси двигателя, и указанная по меньшей мере одна излучающая поверхность может быть включена в дистальный конец одной из указанных лопастей винта.
Дистальный конец лопасти (то есть конец лопасти, наиболее удаленный в радиальном направлении от оси двигателя, противоположно ее проксимальному концу) представляет собой место, где лопасть является наиболее гибкой и где, следовательно, вибрации являются наибольшими. Таким образом, структурный дефект лопасти, который приводит к изменению жесткости, будет более заметен на конце лопасти, чем в другом месте.
Согласно некоторым вариантам система может быть выполнена так, что указанная по меньшей мере одна излучающая поверхность может быть включена между проксимальным и дистальным концами лопасти на расстоянии в радиальном направлении от этих двух концов.
Согласно некоторым вариантам система может быть выполнена так, что оптическое излучающее устройство содержит световой источник, выполненный с возможностью размещения на расстоянии от винта; и по меньшей мере один световод, выполненный с возможностью размещения внутри лопасти винта таким образом, чтобы направлять световой пучок от светового источника к указанной по меньшей мере одной излучающей поверхности.
Таким образом, можно существенно уменьшить стоимость инструментального контроля заданной лопасти винта. Действительно, мониторинг этой лопасти можно осуществлять путем простого встраивания световода в указанную лопасть, при этом световой источник может быть расположен на расстоянии от этой лопасти, в частности, вблизи оси двигателя, и световой пучок может исходить из излучающей поверхности этой лопасти после прохождения в световоде между световым источником и этой излучающей поверхностью.
Кроме того, эта конструкция обеспечивает излучение светового пучка из винта в отсутствие любого электрического контакта с винтом, поскольку световой источник находится на удалении от указанного винта. Это позволяет обойти технические трудности, которые обычно возникают по причине установления электрического контакта с винтом, в частности, с его лопастями.
Кроме того, благодаря этому отсутствию электрического контакта, производить замену лопасти, содержащей световод, на другую аналогичную лопасть не труднее, чем в случае замены одной обычной лопасти на другую, что упрощает обслуживание винта.
Согласно некоторым вариантам система может быть выполнена так, что оптическое излучающее устройство содержит множество излучающих поверхностей, соответственно выполненных с возможностью включения во множество лопастей винта и даже в каждую из лопастей винта.
Таким образом, световой пучок может выходить наружу винта из множества излучающих поверхностей, причем каждая из этих излучающих поверхностей неподвижно соединена с отдельной лопастью. Это позволяет отслеживать состояние нескольких лопастей винта последовательно в порядке, в котором каждая из отдельных излучающих поверхностей последовательно проходит перед обнаруживающей поверхностью.
Согласно некоторым вариантам система может быть выполнена так, что оптическое излучающее устройство содержит множество световодов, соответственно выполненных с возможностью размещения внутри лопастей винта, предназначенных для включения в них излучающих поверхностей.
Таким образом, световой пучок может исходить из одного светового источника, затем распространяться через различные световоды, каждый из которых расположен внутри разных лопастей винта, и, наконец, выходить наружу винта из многих мест, соответствующих разным излучающим поверхностям, которые выполнены с возможностью включения в разные лопасти, в которых находятся световоды. Следовательно, эта конструкция представляет собой простое и недорогое решение для отслеживания состояния нескольких лопастей винта.
Согласно некоторым вариантам система может быть выполнена так, что оптическое излучающее устройство содержит обтюратор, выполненный с возможностью установки между световым источником и световодами таким образом, чтобы освещать только тот или те световоды, которые находятся внутри по меньшей мере одного заранее определенного углового интервала.
Это позволяет освещать только контролируемую лопасть или несколько контролируемых лопастей, которые в данный момент находятся внутри по меньшей мере одного заранее определенного углового интервала, тогда как излучающая поверхность этой контролируемой лопасти или одной из этих контролируемых лопастей находится напротив обнаруживающей поверхности.
Другие лопасти, соответствующие световоды которых находятся за пределами указанного по меньшей мере одного заранее определенного углового интервала, световым источником не освещаются, так как обтюратор перекрывает это освещение. Поэтому винт не излучает на своей наружной окружности слишком большое количество последовательных световых точек, которые при наблюдении снаружи летательного аппарата могли бы вместе иметь вид световой гирлянды, что создавало бы неудобство и/или было бы не эстетичным.
Согласно некоторым вариантам система может содержать устройство идентификации лопастей.
Такое устройство идентификации позволяет идентифицировать отдельно по меньшей мере одну или каждую (по выбору) из лопастей винта, проходящих перед обнаруживающей поверхностью, и за счет этого устанавливать соответствие между различными сигналами, последовательно обнаруживаемыми оптическим обнаруживающим устройством, и различными лопастями, последовательно проходящими перед обнаруживающей поверхностью.
Согласно некоторым вариантам система может быть выполнена так, что устройство идентификации содержит систему поляризации, выполненную с возможностью изменения фазы или цвета светового пучка для по меньшей мере одной из излучающих поверхностей.
Согласно некоторым вариантам система может содержать по меньшей мере один поляризатор, который неподвижно соединен в перемещении с винтом и может располагаться между световым источником и световодом излучающей поверхности.
Согласно некоторым вариантам система может быть выполнена так, что неподвижный модуль включает в себя конструктивный элемент крыла летательного аппарата, при этом указанная по меньшей мере одна обнаруживающая поверхность выполнена с возможностью включения в указанный конструктивный элемент.
Согласно некоторым вариантам система может быть выполнена так, что неподвижный модуль включает в себя элемент фюзеляжа летательного аппарата, при этом указанная по меньшей мере одна обнаруживающая поверхность выполнена с возможностью включения в указанный элемент фюзеляжа.
Согласно некоторым вариантам система может быть выполнена так, что неподвижный модуль включает в себя гондолу для винта, при этом указанная по меньшей мере одна обнаруживающая поверхность выполнена с возможностью включения в указанную гондолу.
Вторым объектом изобретения является узел, выполненный с возможностью встраивания в летательный аппарат и содержащий неподвижный модуль; винт двигателя с множеством лопастей; и систему, являющуюся первым объектом изобретения.
Третьим объектом изобретения является агрегат в сборе, предназначенный для встраивания в летательный аппарат и содержащий узел, являющийся вторым объектом изобретения, и двигатель, оснащенный по меньшей мере одним ротором, включающим в себя винт узла, и статором, включенным в неподвижный модуль узла.
Согласно некоторым вариантам двигатель может быть турбовинтовым двигателем.
Согласно некоторым вариантам двигатель может быть выполнен таким образом, что лопасти винта являются не заключенными в кожух. При этом двигатель может быть двигателем с открытым ротором (часто называемым на английском языке «open-rotor»).
Четвертым объектом изобретения является летательный аппарат, включающий в себя по меньшей мере один агрегат в сборе, являющийся третьим объектом изобретения.
Вышеупомянутые, а также другие особенности и преимущества будут более очевидны из последующего подробного описания вариантов осуществления изобретения на не ограничительных поясняющих примерах со ссылками на чертежи.
Краткое описание чертежей
Чертежи являются схематичными и представлены не в масштабе, они предназначены, прежде всего, для пояснения раскрытых принципов.
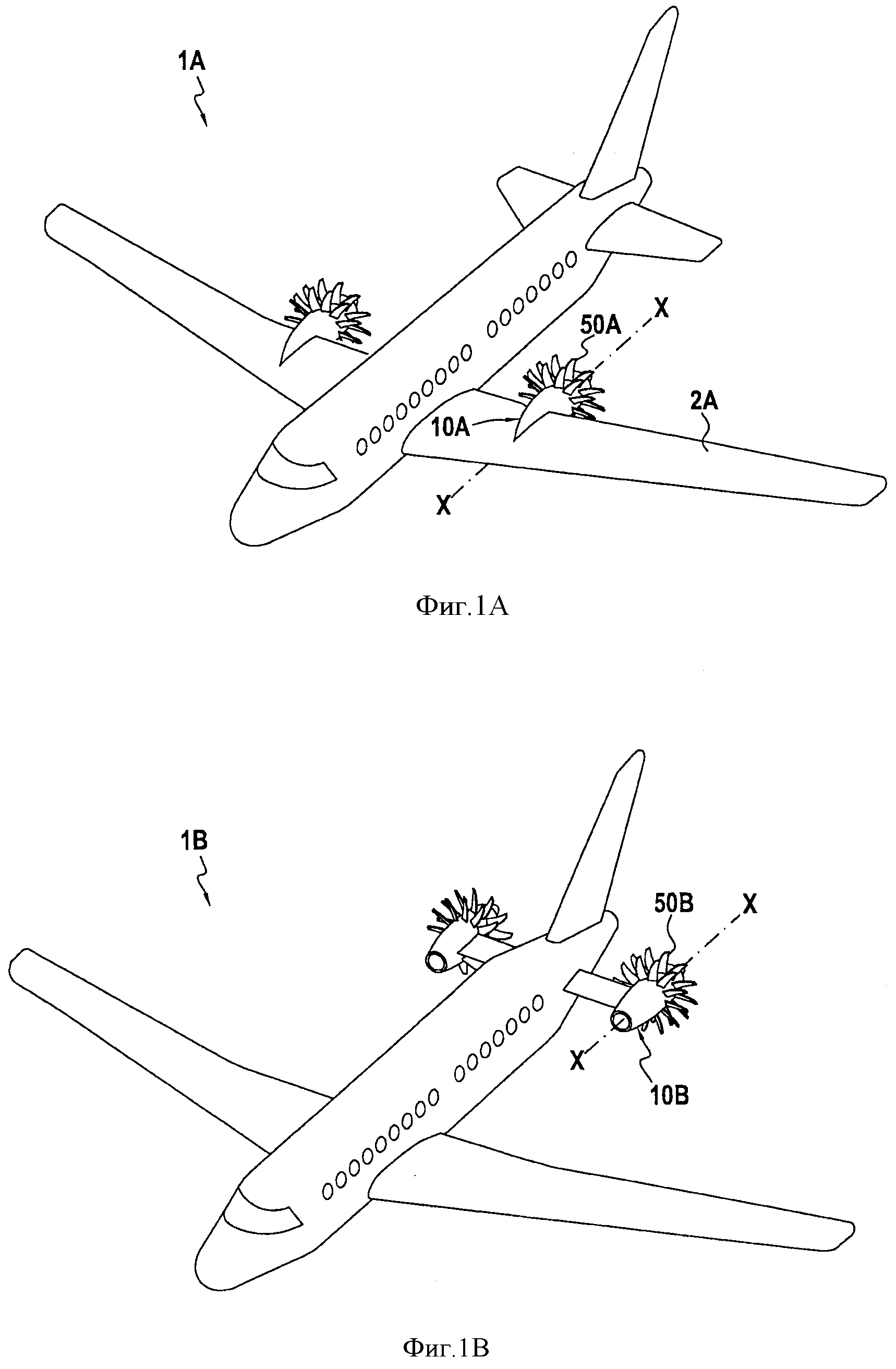
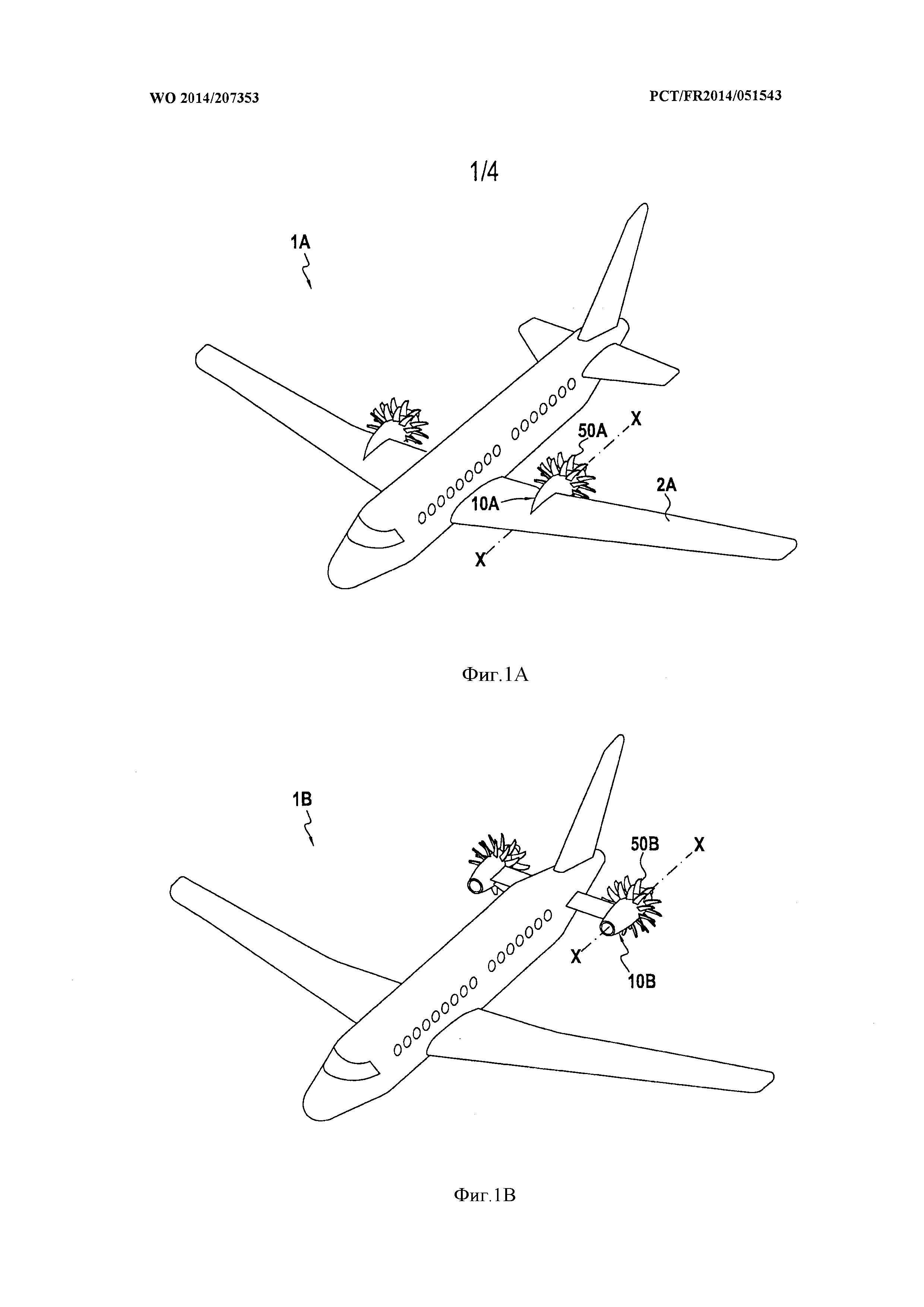
На фиг. 1А показан летательный аппарат, содержащий два узла, каждый из которых оснащен системой дистанционной связи согласно первому варианту осуществления изобретения, схематичный вид в перспективе;
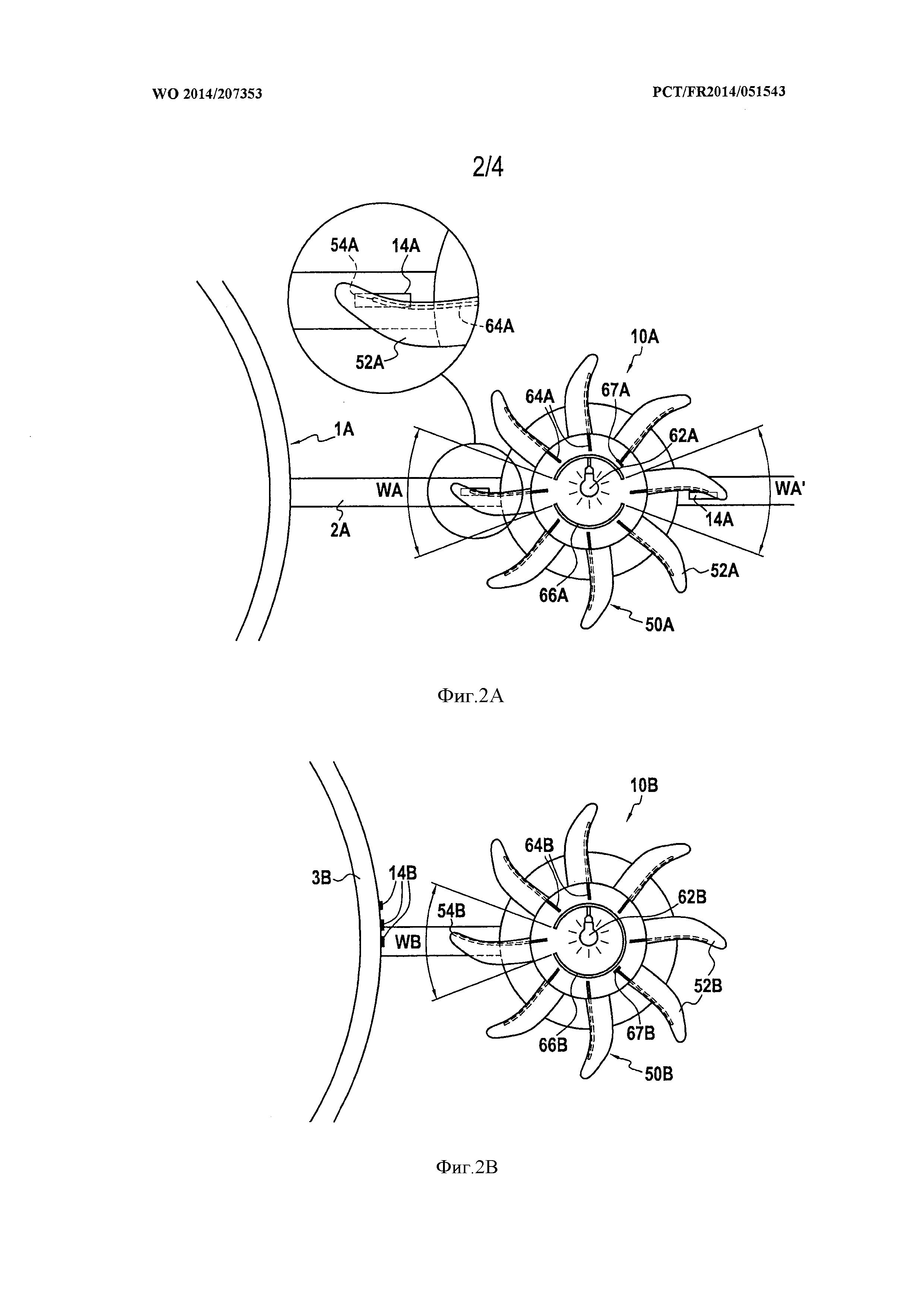
на фиг. 2А - часть летательного аппарата на фиг. 1А с подробным изображением прохождения излучающих поверхностей лопасти перед обнаруживающими поверхностями, вид в вертикальной проекции сзади;
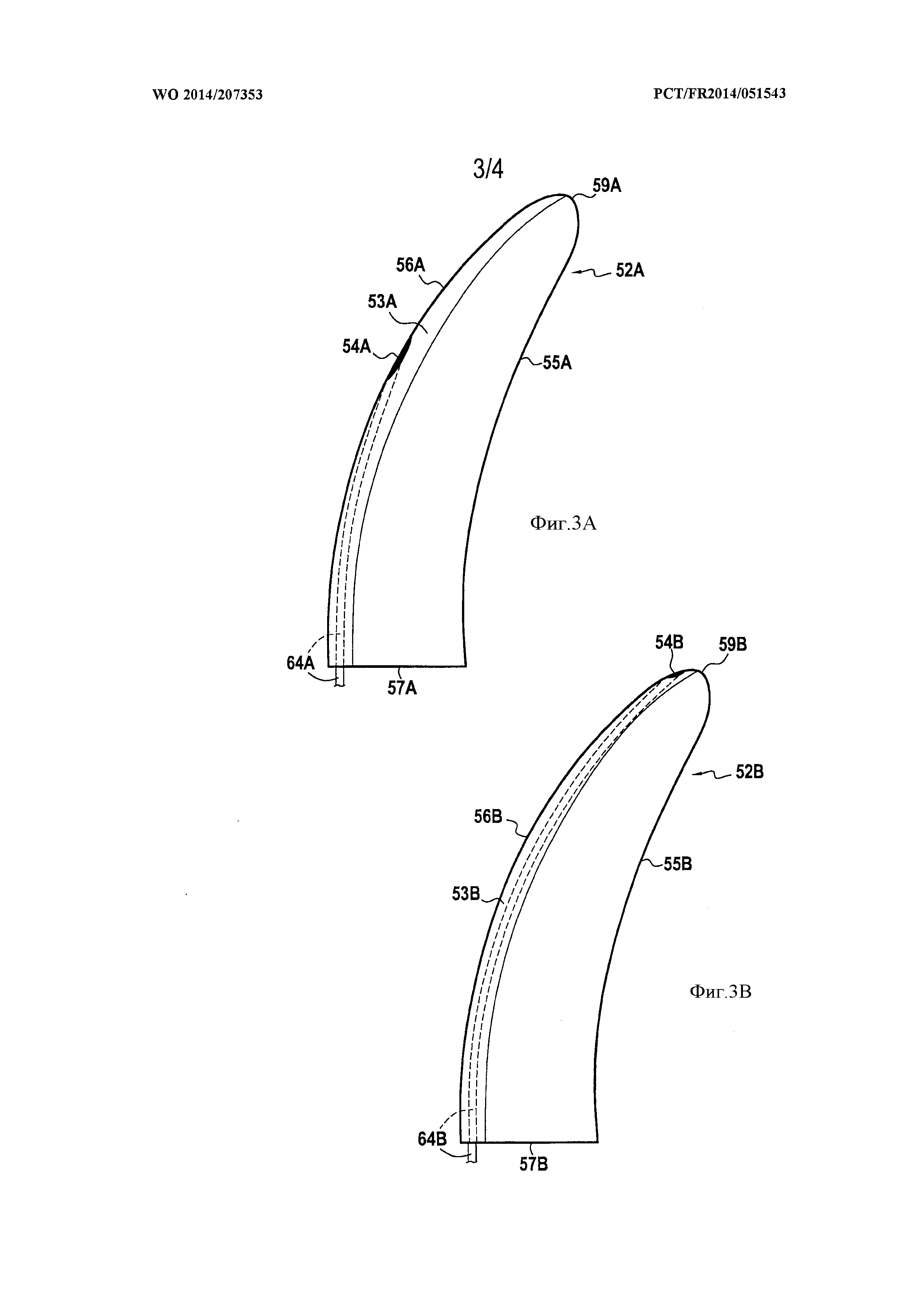
на фиг. 3А - лопасть согласно первому варианту осуществления, которая показана отдельно и в которую встроен световод, вид в сбоку в радиальной плоскости;
фиг. 1B, 2В и 3В являются аналогичными фиг. 1А, 2А и 3А соответственно, при этом летательный аппарат содержит два узла, каждый из которых оснащен системой дистанционной связи согласно второму варианту осуществления изобретения;
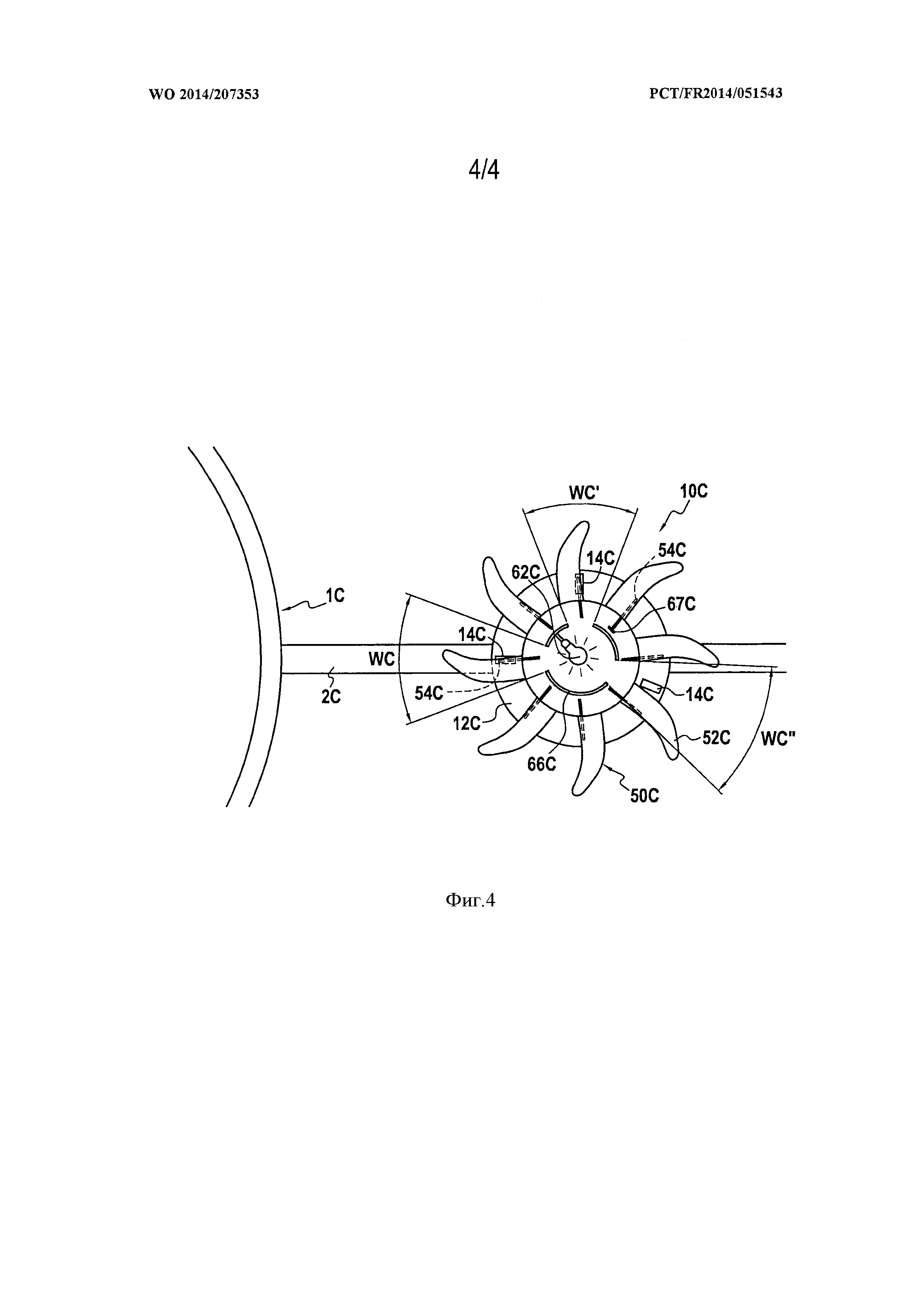
фиг. 4 поясняет третий вариант осуществления изобретения на виде, аналогичном фиг. 2А и 2В.
Варианты осуществления изобретения
На фиг. 1А, 2А и 3А очень схематично представлен летательный аппарат 1А согласно первому варианту осуществления, содержащий два узла, каждый из которых оснащен системой дистанционной связи.
На фиг. 1B, 2В и 3В очень схематично представлен летательный аппарат 1В согласно второму варианту осуществления, содержащий два узла, каждый из которых оснащен системой дистанционной связи.
На фиг. 4 очень схематично представлен летательный аппарат 1С согласно третьему варианту осуществления, содержащий два узла, каждый из которых оснащен системой дистанционной связи.
Эти первый, второй и третий варианты осуществления имеют очень сходные особенности, поэтому они будут описаны одновременно из соображений упрощения раскрытия. Ссылочные обозначения, относящиеся к первому варианту осуществления, дополнены буквой A, тогда как ссылочные обозначения, относящиеся ко второму варианту осуществления, дополнены буквой B. Наконец, ссылочные обозначения, относящиеся к третьему варианту осуществления, дополнены буквой С.
Согласно каждому из этих трех вариантов летательный аппарат 1А, 1В, 1С включает в себя два узла, которые являются идентичными (хотя от этого условия можно отступить, не выходя за рамки изобретения), поэтому из соображений упрощения далее подробно будет описан только один из двух узлов.
Согласно этим вариантам агрегат в сборе содержит неподвижный модуль 10А, 10В, 10С, выполненный с возможностью встраивания в летательный аппарат 1А, 1В, 1С; двигатель, оснащенный статором, встроенным в неподвижный модуль, и по меньшей мере один ротор, содержащий винт 50А, 50В, 50С с множеством лопастей 52А, 52В, 52С, выполненный с возможностью вращения вокруг оси X двигателя (показана на фиг. 1А и 1В) относительно статора; и систему дистанционной связи.
Винт 50А, 50В, 50С, неподвижный модуль 10А, 10В, 10С и система дистанционной связи образуют узел в соответствии с изобретением.
Согласно первому и второму вариантам летательный аппарат 1А, 1В оснащен двигателями типа турбовинтовых с двумя винтами 50А, 50В, содержащими множество лопастей, не заключенных в кожух. Согласно этим вариантам турбовинтовые двигатели являются двигателями с открытым ротором («open-rotor») и сами по себе известны. Согласно этим вариантам оба винта установлены сзади двигателя и к тому же вращаются в противоположных направлениях.
Согласно третьему варианту летательный аппарат 1С оборудован двигателями по меньшей мере с одним тянущим винтом (например, только с одним винтом), которые тоже известны.
Кроме того, без изменения сущности изобретения, может быть обеспечен двигатель, содержащий только один тяговый винт или по меньшей мере два тянущих винта.
Согласно этим трем вариантам система дистанционной связи является системой оптической связи. Эта система содержит оптическое излучающее устройство, выполненное в возможностью, когда система встроена в летательный аппарат, излучения светового пучка, который выходит наружу по меньшей мере одного винта 50А, 50B, 50С из множества излучающих поверхностей 54А, 54В, 54С указанного винта 50А, 50В, 50С.
Согласно первому и второму вариантам только один из двух винтов 50А, 50В, в частности, только винт, находящийся ближе всего к входу (относительно направления перемещения воздушных потоков, когда винты находятся в нормальных условиях использования), имеет такие излучающие поверхности. Вместе с тем, не выходя за рамки изобретения, могут быть обеспечены двигатели, в которых оба винта или только винт, находящийся дальше всего на выходе, по выбору, содержит по меньшей мере одну излучающую поверхность.
Согласно этим вариантам система связи содержит оптическое устройство обнаружения светового пучка, содержащее по меньшей мере одну обнаруживающую поверхность 14А, 14B, 14С, которая является чувствительной к световому пучку и выполнена с возможностью включения в неподвижный модуль 10А, 10В, 10С таким образом, чтобы каждая излучающая поверхность 54А, 54B, 54С и указанная по меньшей мере одна обнаруживающая поверхность 14А, 14B, 14С последовательно оказывались напротив и на расстоянии друг от друга, когда винт 50A, 50В, 50С вращается относительно неподвижного модуля 10А, 10B, 10С (см. фиг. 2А, 2В и 4).
Согласно первому варианту неподвижный модуль 10А включает в себя конструктивный элемент крыла 2А летательного аппарата 1А, и указанная по меньшей мере одна обнаруживающая поверхность 14А приспособлена для прикрепления к указанному конструктивному элементу.
В частности, согласно этому варианту указанный конструктивный элемент выполнен таким образом, что указанная по меньшей мере одна обнаруживающая поверхность 14А находится на задней кромке крыла 2А летательного аппарата 1А, когда этот конструктивный элемент встроен в крыло 2А. Кроме того, этот конструктивный элемент может быть выполнен заодно с крылом 2А или может быть деталью, присоединяемой к этому крылу 2А.
Кроме того, согласно этому варианту система связи содержит две обнаруживающие поверхности 14А, которые могут быть расположены с двух сторон от двигателя на крыле 2А. Вместе с тем, не выходя за рамки изобретения, может быть обеспечена только одна поверхность или более двух поверхностей, по выбору.
Согласно этому варианту соответствующие места этих двух поверхностей на крыле 2А специально расположены не симметрично относительно плоскости, содержащей ось X двигателя, для уменьшения систематических шумов в обнаруживаемых сигналах. В частности, эти поверхности смещены относительно друг друга в вертикальном направлении.
Кроме того, согласно этому варианту световой поток, проходящий от винта 50А из излучающей поверхности 54А, является параллельным оси X двигателя, вокруг которой вращается винт 50A. Кроме того, обнаруживающая поверхность 14А является плоской и перпендикулярна к этой оси C двигателя согласно этому варианту.
Согласно второму варианту неподвижный модуль 10B содержит элемент 3В фюзеляжа летательного аппарата 1В, и указанная по меньшей мере одна обнаруживающая поверхность 14В приспособлена для прикрепления к указанному элементу 3В фюзеляжа.
Согласно этому второму варианту указанный элемент 3В фюзеляжа выполнен заодно с фюзеляжем летательного аппарата 1В или является деталью, присоединяемой к указанному фюзеляжу.
Согласно этому второму варианту система связи содержит три обнаруживающих поверхности 14B, соответственно выполненных с возможностью включения в элемент 3В фюзеляжа в отличных друг от друга угловых положениях относительно оси X двигателя. Вместе с тем, не выходя за рамки изобретения, может быть обеспечена только одна поверхность, две или более трех поверхностей, по выбору.
Согласно этому второму варианту соответствующие места этих трех обнаруживающих поверхностей 14B на элементе 3В фюзеляжа специально расположены не симметрично относительно плоскости, содержащей ось X двигателя, для уменьшения систематических шумов в обнаруживаемых сигналах. В частности, эти поверхности смещены относительно друг друга в угловом направлении с несимметричными углами.
Кроме того, согласно этому второму варианту световой поток, проходящий от винта 50B из излучающей поверхности 54B распространяется в радиальном направлении относительно оси X двигателя, перпендикулярном к этой оси.
Согласно третьему варианту неподвижный модуль 10С включает в себя гондолу 12С для винта 50С, и указанная по меньшей мере одна обнаруживающая поверхность 14С приспособлена для прикрепления к указанной гондоле 12С. Эта гондола 12С может быть хорошо известной неподвижной частью двигателя.
Кроме того, согласно этому третьему варианту система связи содержит три обнаруживающих поверхности 14С, расположенные на угловом расстоянии и разнесенные друг от друга на гондоле 12С. Вместе с тем, не выходя за рамки изобретения, может быть обеспечена только одна поверхность, две или более трех поверхностей, по выбору.
Согласно этому третьему варианту соответствующие места этих трех обнаруживающих поверхностей 14С на гондоле 12С специально расположены не симметрично относительно плоскости, содержащей ось X двигателя, для уменьшения систематических шумов в обнаруживаемых сигналах. В частности, эти поверхности неравномерно расположены на расстоянии друг от друга в угловом направлении.
Кроме того, согласно этому третьему варианту световой поток, проходящий от винта 50С из излучающей поверхности 54С, является параллельным направлению оси X двигателя, вокруг которой вращается винт 50С. Кроме того, обнаруживающая поверхность 14С является плоской и имеет наклон относительно этой оси X двигателя согласно этому варианту.
Кроме того, согласно всем трем вариантам лопасти 52А, 52B, 52С винта 50А, 50B, 50С имеют, каждая, переднюю кромку 56А, 56B и заднюю кромку 55А, 55B.
Согласно первому и второму вариантам излучающие поверхности 54А, 54B включены, каждая, в переднюю кромку 56А, 56B лопастей 52А, 52B винта 50А, 50B, в которых эти поверхности могут быть соответственно выполнены.
Согласно третьему варианту излучающие поверхности 54С включены, каждая, в заднюю кромку лопастей винта 50С, в которых эти поверхности могут быть соответственно выполнены.
Согласно первому варианту (см., в частности, фиг. 3А) лопасти 52А винта имеют, каждая, в радиальном направлении относительно оси X двигателя дистальный конец 59А и проксимальный конец 57А относительно оси X двигателя, и излучающие поверхности 54А выполнены, каждая, на расстоянии (в частности, по существу, на половине расстояния) в этом радиальном направлении от проксимального 57А и дистального 59А концов различных лопастей 52А, в которые они соответственно включены.
Лопасти 52С согласно третьему варианту аналогичны лопастям согласно первому варианту за исключением того, что излучающие поверхности 54С выполнены ближе в радиальном направлении к проксимальному концу, чем в первом варианте.
Согласно второму варианту (см., в частности, фиг. 3В) лопасти 52B винта имеют, каждая, дистальный конец 59B и проксимальный конец 57АВ относительно оси X двигателя, и излучающие поверхности 54B выполнены в дистальных концах 59В лопастей 52B, в которые они соответственно включены.
Кроме того, согласно всем трем вариантам оптическое излучающее устройство содержит световой источник 62А, 62B, 62С, выполненный с возможностью размещения на расстоянии от винта 50А, 50B, 50С, и множество световодов 64А, 64B, 64С, соответственно выполненных с возможностью размещения внутри лопастей 52А, 52B, 52С винта 50А, 50B, 50С, включающих в себя излучающие поверхности 54А, 54B, 54С.
В частности, согласно первому и второму вариантам, как показано на фиг. 3А и 3B, световоды 64А, 64B расположены внутри усиления 53А, 53B передней кромки 56А, 56B. Это решение позволяет не затрагивать композитную структуру лопасти 52А, 52B и не снижать ее конструктивную прочность. Кроме того, встраивание световодов в лопасти может быть осуществлено во время этапа способа изготовления, дополнительного относительно известного способа изготовления лопастей, что не оказывает существенного влияния на стоимость и время изготовления лопастей.
Согласно третьему варианту световоды 64С аналогично встроены в усиление задней кромки лопастей 52С.
Согласно всем трем вариантам световод 64А, 64B, 64С имеет первый конец, который выходит из лопасти 52А, 52B, 52С, из ее проксимального конца, таким образом, что оказывается вблизи светового источника 62А, 62B, 62С, и второй конец, который выходит в переднюю кромку 56А, 56B (соответственно в заднюю кромку) в месте, которое является излучающей поверхностью 54А, 54B, 54С, и в котором световой поток выходит из лопасти 52А, 52B, 52С наружу этой лопасти.
Таким образом, световод 64А, 64B, 64С может направлять световой пучок от светового источника 62А, 62B, 62С к излучающей поверхности 54А, 54B, 54С, чтобы световой пучок мог выходить наружу лопасти 52А, 52B, 52С из этой излучающей поверхности 54А, 54B, 54С.
Согласно всем трем вариантам световой источник 62А, 62B, 62С, по меньшей мере, частично расположен внутри полой центральной части винта 50А, 50B, 50С. В частности, световой источник отстоит от краев, ограничивающих полость указанной центральной части, чтобы не соприкасаться с этими краями, когда винт вращается относительно светового источника, который остается неподвижным. В частности, световой источник 62А, 62B, 62С неподвижно соединен с неподвижным модулем. Он находится вблизи оси X двигателя, если смотреть на него в плоскости, перпендикулярной к указанной оси X двигателя.
Кроме того, согласно всем трем вариантам (см., в частности, фиг. 2А, 2B и 4) оптическое излучающее устройство содержит обтюратор 66А, 66B, 66С, выполненный с возможностью установки между световым источником 62А, 62B, 62С и световодами 64А, 64B, 64С таким образом, чтобы освещать только тот или те из световодов 64А, 64B, 64С, который(ые) находится(ятся) внутри заранее определенного углового интервала WA, WA', WB, WC, WC', WC''.
В частности, согласно этим вариантам обтюратор 66А, 66B, 66С, по меньшей мере, частично расположен в полой центральной части винта 50А, 50B, 50С.
Кроме того, согласно этим вариантам обтюратор 66А 66B, 66С в основном имеет форму полого цилиндра. Он встроен в неподвижный модуль таким образом, чтобы его ось совпадала с осью X двигателя и чтобы световой источник 62А, 62B, 62С, по меньшей мере, частично находился в полой части обтюратора 66А, 66B, 66С. Кроме того, этот обтюратор имеет по меньшей мере один вырезанный угловой участок, через который может проходить свет, излучаемый световым источником 62А, 62B, 62С, и края которого ограничивают указанный по меньшей мере один угловой интервал WA, WA', WB, WC, WC', WC''.
Согласно первому и третьему вариантам обтюратор 66А, 66С имеет столько же заранее определенных угловых интервалов WA, WA', WC, WC', WC'' (и соответствующих вырезанных угловых участков), сколько излучающих поверхностей 14А, 14С имеет система связи, хотя, не выходя за рамки изобретения, это условие можно не соблюдать, как во втором варианте, где он имеет только один заранее определенный угловой интервал WB (и соответственно только один вырезанный угловой участок).
Кроме того, согласно этим трем вариантам система содержит устройство идентификации лопастей 52А, 52B, 52С винта 50А, 50B, 50С.
В частности, согласно этим вариантам указанное устройство идентификации содержит систему поляризации, выполненную с возможностью изменения фазы или цвета светового пучка, по меньшей мере, для одной излучающей поверхности 54А, 54B (в частности, только одной согласно трем вариантам, хотя это и не обязательно в рамках изобретения).
Согласно всем трем вариантам система поляризации содержит поляризатор 67А, 67B, 67С, который неподвижно соединен в перемещении с винтом 50А, 50B, 50С и выполнен с возможностью размещения между световым источником 62А, 62B, 62С и световодом 64А, 64B, 64С излучающей поверхности 54А, 54B, 54С. В частности, поляризатор неподвижно соединен со ступицей винта, в которой закреплены лопасти.
Обнаруживающая поверхность 14А, 14B, 14С выполнена с возможностью отслеживания разности интенсивности или цвета, создаваемой поляризатором 67А, 67B, 67С, что позволяет отличать лопасть, неподвижно соединенную с поляризатором, от других лопастей.
Кроме того, не выходя за рамки изобретения, можно связать систему дистанционной связи с системой обработки сигнала, обнаруживаемого на указанной по меньшей мере одной обнаруживающей поверхности устройства обнаружения. Для этого можно использовать систему обработки, аналогичную системе, обычно применяемой для известной технологии «tip timing» (то есть «хронометраж по концу») с магнитным или емкостным датчиком.
Раскрытые варианты или примеры выполнения представлены в качестве не ограничительного пояснения, и специалист в данной области может легко, на основании этого раскрытия, изменять эти варианты или примеры выполнения или обеспечить другие, не изменяя сущности изобретения.
Кроме того, различные особенности согласно этим вариантам или примерам выполнения могут быть использованы отдельно или в комбинации. Если эти особенности комбинируют, то эти комбинации могут соответствовать описанным или могут быть другими, поскольку изобретение не ограничено конкретными раскрытыми комбинациями. В частности, если не указано иное, особенность, описанную в связи с одним вариантом или примером выполнения, можно аналогично применить к другому варианту или примеру выполнения.
Способ обнаружения неисправности вентиля в газотурбинном двигателе
Способ содействия обнаружению повреждения трубопровода турбореактивного двигателя
Коробка приводов для авиационного газотурбинного двигателя
Способ и устройство контроля параметра ракетного двигателя
Способ изготовления мартенситно-стареющей стали
Способ и устройство для изготовления композитной лопатки
Система и способ экстренного запуска газотурбинного двигателя летательного аппарата
Волокнистая заготовка для полой лопатки газотурбинного двигателя
Противопожарная защита картера вентилятора из композиционного материала
Лопатка спрямляющего аппарата газотурбинного двигателя
Система сбора вибрационного сигнала поворотного двигателя
Способ и устройство акустического обнаружения нарушения работы двигателя, снабженного активным контролем шума
Способ и устройство мониторинга лопаточного колеса авиационного двигателя посредством измерения положения равновесия

