СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ
Вид РИД
Изобретение
Уровень техники
Высоковольтные электрические подстанции включают разнообразное оборудование, например, трансформаторы тока, трансформаторы напряжения, выключатели и т.д. Нарушения изоляции высоковольтного оборудования могут создавать в подстанции электромагнитные помехи (ЭМП).
В настоящем изобретении ставится задача анализа присутствующих в подстанции ЭМП для определения местоположения потенциально поврежденных единиц оборудования и выдачи прозрачной диаграммы (карты) распределения интенсивности, наложенной на аэрофотографию подстанции и показывающей местоположение повреждений.
Раскрытие изобретения
Предлагаемая в изобретении система определения места повреждения включает:
модуль обнаружения электромагнитной помехи, обнаруживающий сигнал ЭПМ и преобразующий его в электрический сигнал;
модуль-анализатор для анализа спектрального состава электрического сигнала для идентификации повреждения;
регистратор местоположения для регистрации местоположения системы в процессе обнаружения сигналов ЭМП;
запоминающее устройство для хранения данных; и
процессор для использования подвергнутых анализу сигналов ЭМП и зарегистрированного местоположения системы для определения местоположения повреждения.
Процессор может определять GPS координаты повреждений.
Запоминающее устройство предпочтительно содержит аэрофотографии географического участка, в пределах которого должны быть обнаружены повреждения, а процессор накладывает места расположения повреждений на аэрофотографию.
Далее процессор может преобразовывать декартовы, или пиксельные, координаты повреждений на аэрофотографиях в GPS координаты повреждений.
В одном примере, процессор определяет GPS местоположение повреждения.
В предлагаемом в изобретении способе определения места повреждения:
обнаруживают сигнал ЭМП и преобразуют его в электрический сигнал;
анализируют спектральный состав электрического сигнала для идентификации повреждения;
регистрируют местоположение системы при обнаружении ЭМП сигнала; и
используют подвергнутые анализу сигналы ЭМП и зарегистрированное местоположение системы для определения местоположения повреждения.
Краткое описание чертежей
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые чертежи, на которых:
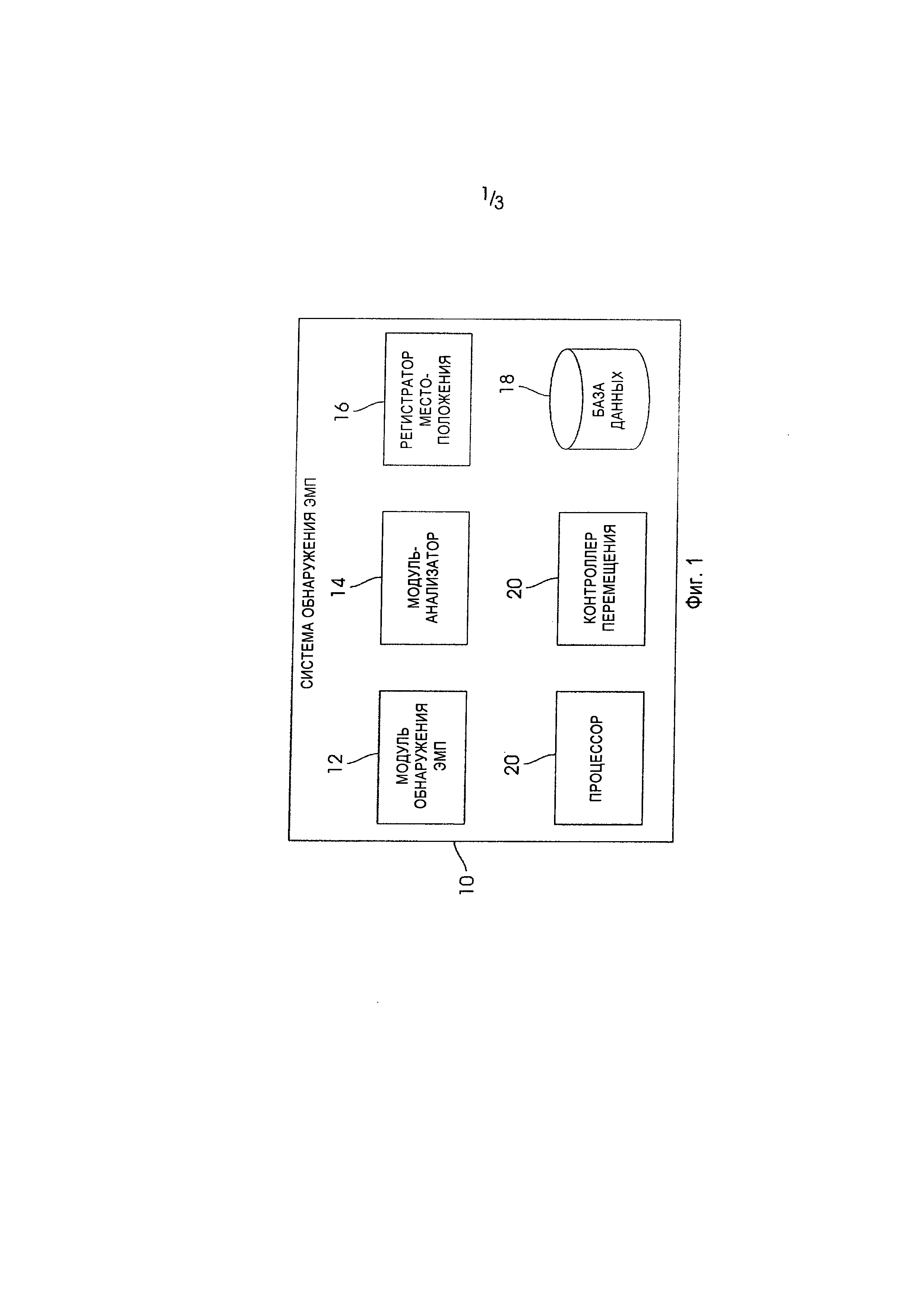
на фиг. 1 представлена блок-схема частного варианта выполнения системы измерений;
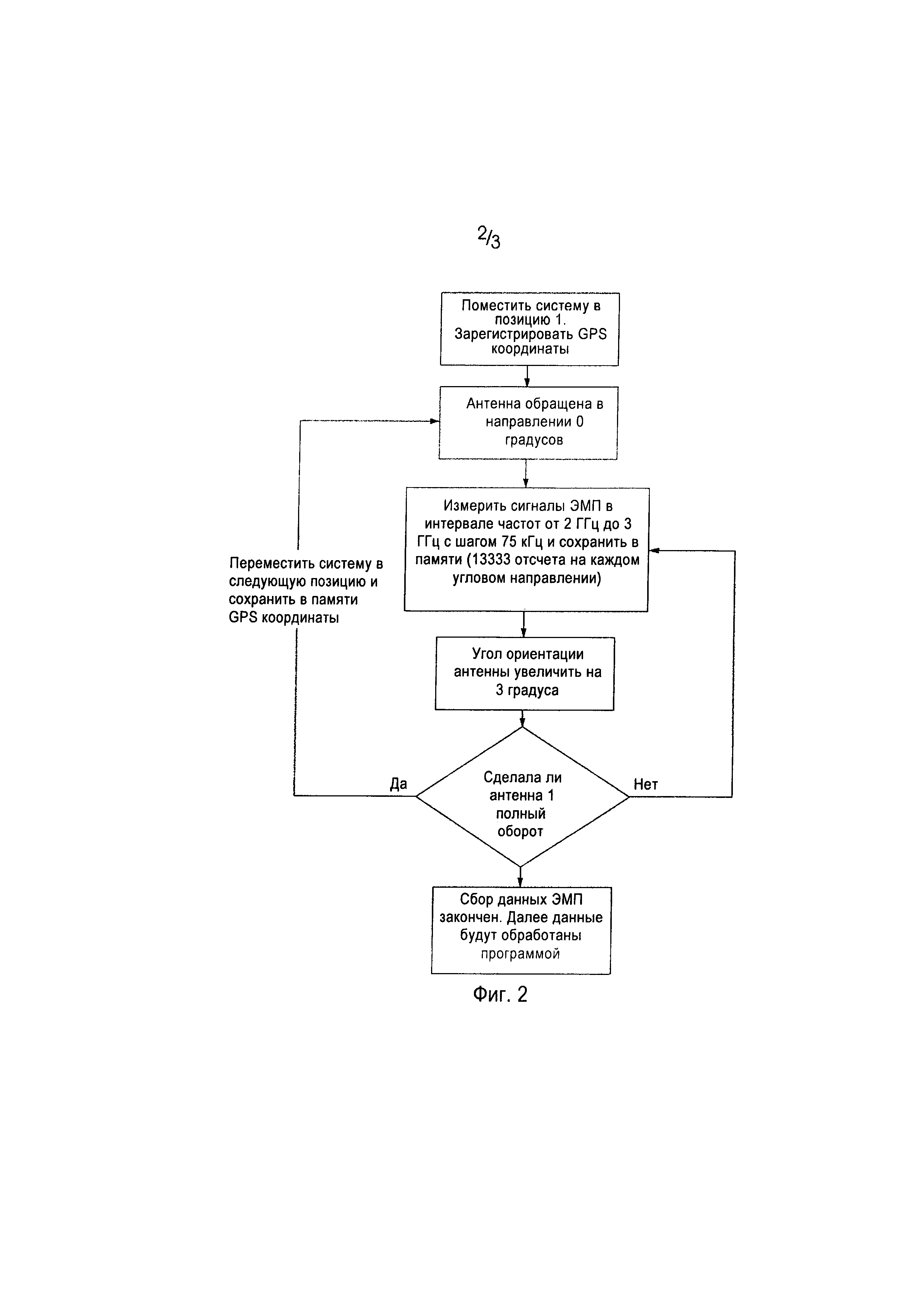
на фиг. 2 представлена блок-схема алгоритма работы системы, показанной на фиг. 1; и
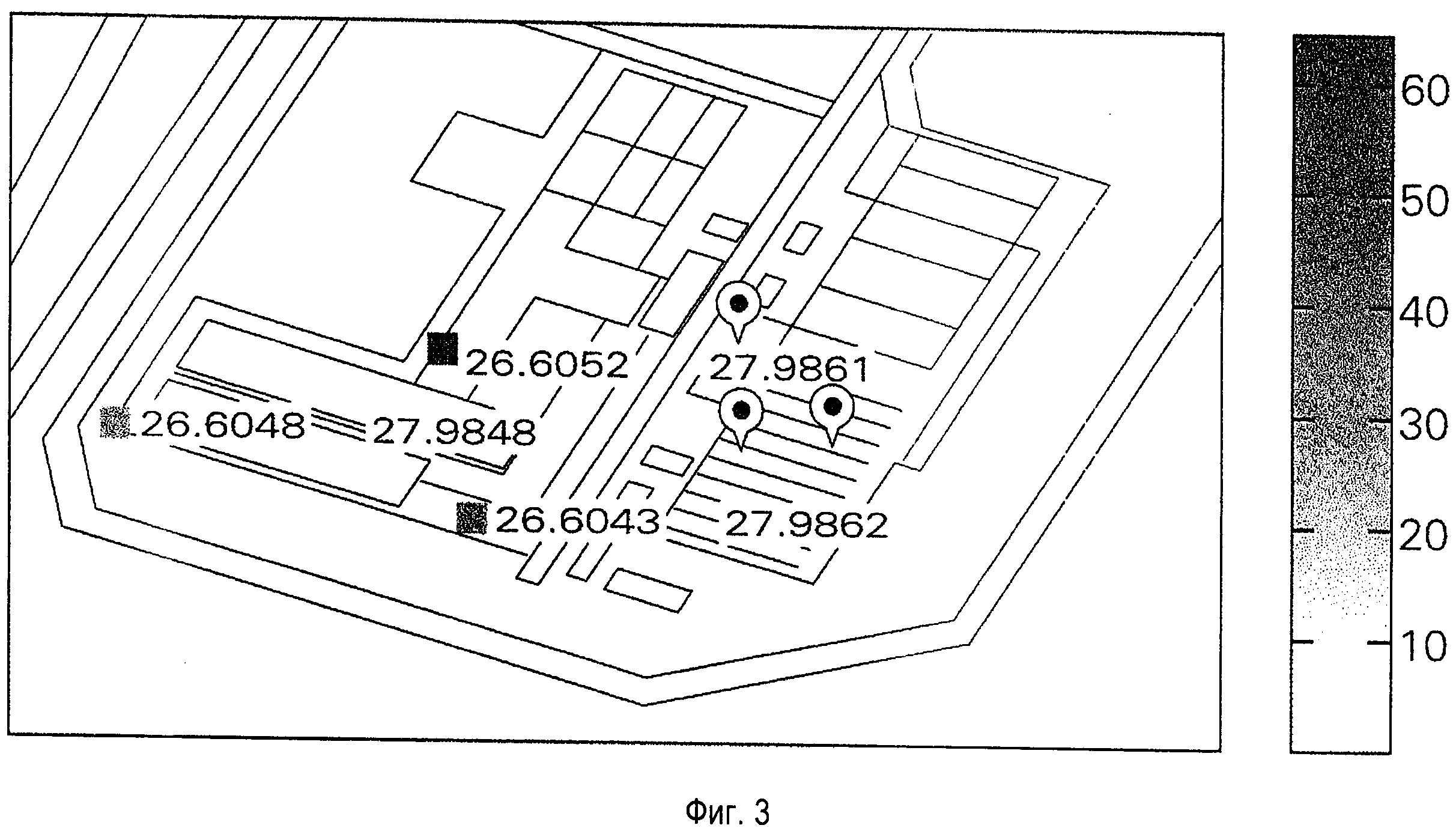
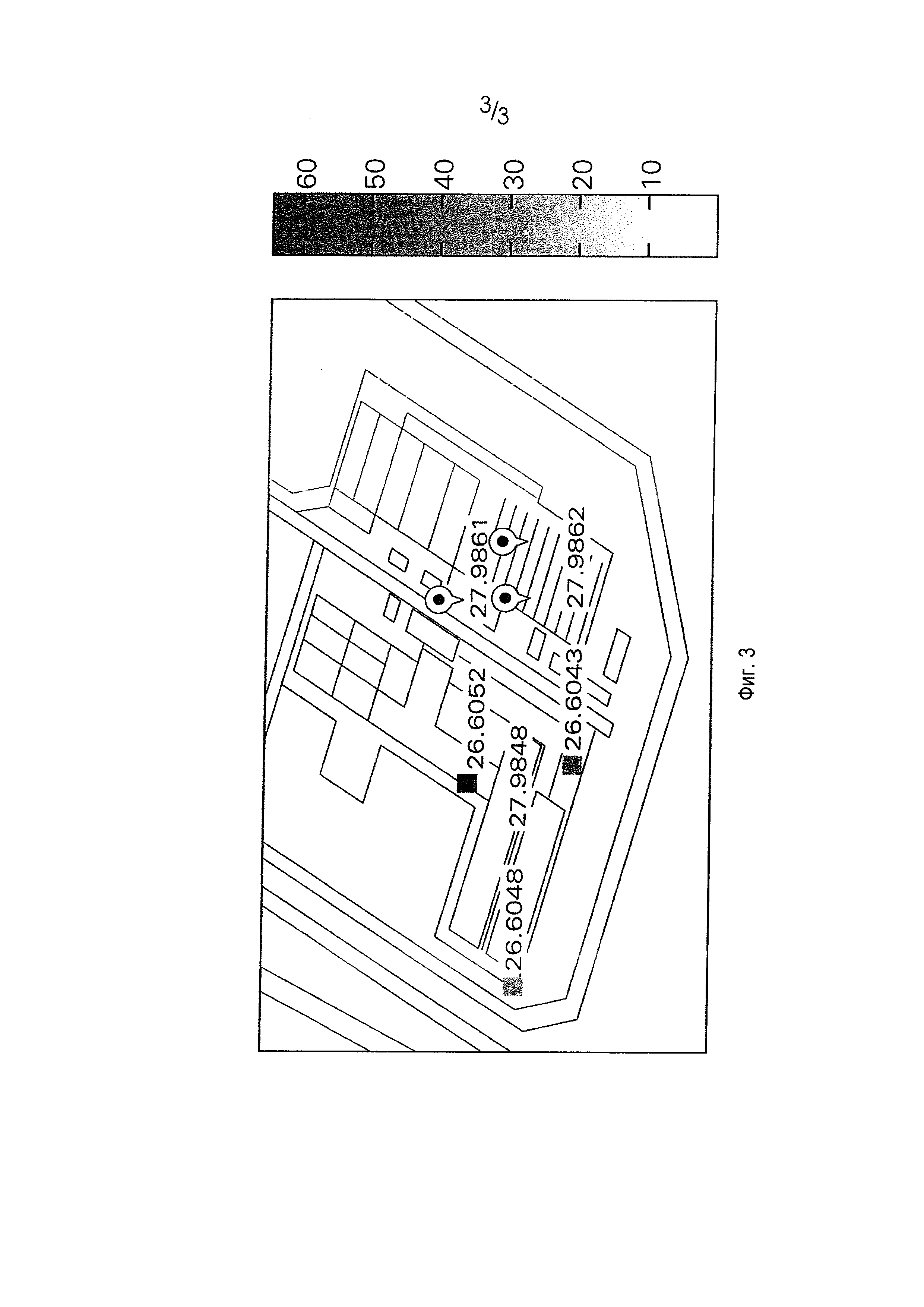
на фиг. 3 показаны конкретные повреждения, идентифицированные и выделенные на фотографии, с вычисленными GPS координатами.
Осуществление изобретения
Ниже, со ссылкой на приложенные чертежи, приводится описание системы 10 обнаружения электромагнитной помехи для определения местоположения потенциально поврежденного оборудования в высоковольтной электрической подстанции.
Сигналы электромагнитной помехи (ЭМП) обнаруживаются в модуле 12 обнаружения ЭМП, который преобразует их в электрический сигнал.
В показанном варианте выполнения, модуль 12 обнаружения ЭПМ обнаруживает ЭМП сигналы и измеряет их мощность в соответствующих единицах, например, в дБм (dBm - уровень в дБ относительно 1 мВт). В приведенном ниже примере, замеры ЭМП выполнялись на частотах в интервале от 0 до 5 ГГц. Следует иметь в виду, что могут использоваться и другие подходящие диапазоны частот.
В качестве модуля обнаружения ЭМП может быть использовано любое электрическое устройство, позволяющее обнаруживать ЭМП и преобразовывать ее в электрический сигнал, предназначенный для обнаружения сигналов ЭМП.
В одном частном варианте выполнения, модуль 12 обнаружения ЭМП включает радиочастотную (РЧ) антенну для обнаружения ЭМП и преобразования ее в электрический сигнал.
Электрический сигнал передается в модуль-анализатор 14, используемый для анализа спектрального состава электрического сигнала. Если отдельный модуль-анализатор 14 не используется, или если модуль-анализатор 14 входит в процессор 20, то эта задача решается процессором 20.
В одном частном варианте выполнения, модуль-анализатор представляет собой анализатор спектра, используемый для исследования спектрального состава электрического сигнала. Если анализатор спектра используется для измерения сигналов ЭМП, то антенна присоединяется к РЧ входу анализатора спектра. В частном варианте выполнения использовался анализатор спектра FSP 7 компании Rohde&Schwarz.
Модуль-анализатор 14 обычно выполняет обработку сигналов и выделяет отдельные источники ЭМП из фонового шума. Модуль-анализатор 14 устанавливает тип и мощность излучений от типичных источников. Также выполняется идентификация и локализация источников помехи.
Для регистрации местоположения устройства в процессе обнаружения сигналов ЭМП используется регистратор 16 местоположения.
В показанном варианте выполнения, регистратор 16 местоположения представляет собой устройство Глобальной системы позиционирования (GPS).
В процессе использования, система последовательно устанавливается в несколько позиций в подстанции, и для каждой ее позиции определяются GPS координаты. В каждой позиции система измеряет сигналы ЭМП или регистрирует данные ЭМП. Ниже этот процесс рассмотрен более подробно. Следует иметь в виду, что для получения того же результата может быть использовано одновременно несколько устройств.
Для хранения данных используется устройство хранения данных в виде запоминающего устройства 18. Все данные по ЭМП хранятся в структуре данных. Примером может служить одномерная матрица, каждый элемент которой представляет собой другую многомерную матрицу, состоящую из нескольких тысяч строк и некоторого количества столбцов, число которых равно числу заданных углов для выполнения измерений. Строки и столбцы соответствуют значениям мощности и углов, упомянутых выше.
В одном частном варианте выполнения, по меньшей мере антенна, высокоточный двигатель, включающий вращающее устройство и контроллер 22 перемещения, установлены в подвижном корпусе, который можно перемещать из одной позиции в другую в любой территории, где должны быть выполнены измерения ЭМП. Обычно такой территорией является место расположения оборудования, например, высоковольтной электрической подстанции.
В каждой из позиций выполняется несколько измерений ЭМП, после чего подвижный блок перемещают в следующую позицию.
Вращающее устройство, соединенное с контроллером 22 перемещения, используется для поворота антенны. Контроллер перемещения должен управлять высокоточным двигателем для достижения очень высокой точности установки положения. Использование высокоточного двигателя обеспечивает установку антенны почти точно на нужные углы. Двигатель поворачивает антенну с определенным шагом, после чего устройство, определяющее спектральный состав сигнала, выполняет измерения, и результаты сохраняются в блоке хранения данных или запоминающем устройстве. Затем двигатель поворачивает антенну в следующее заданное угловое положение, и снова выполняются измерения. Таким образом совершается полный оборот.
Следует заметить, что чем на меньший угол происходит смещение на каждом шаге, тем выше точность системы. При величине шага 3° полный оборот включает 120 заданных угловых положений. Также следует иметь в виду, что аналогичные результаты могут быть получены при немеханическом повороте антенны, либо посредством антенной решетки или направляющей системы, например рефлектора.
С контроллером перемещения соединен двигатель постоянного тока, который может быть использован для поворота РЧ антенны требуемым образом. В данном примере, контроллер перемещения входит в состав процессора 20.
В процессе использования, в каждой позиции измерения на подстанции РЧ антенна поворачивается вращающей системой с шагом 3°, например, в пределах полного поворота.
Вначале, антенна обращена в направлении 0°, и устройство, определяющее спектральный состав электрического сигнала, выполняет измерения сигналов ЭМП, например, в интервале от 0 ГГц до 5 ГГц, например, с дискретом от 0 кГц до 1 ГГц. Таким образом, при угловом положении 0° получают несколько тысяч отсчетов.
В представленном варианте выполнения, все модули входят в состав единой модульной и подвижной системы. Следует, однако, иметь в виду, что некоторые из модулей, показанных на фиг. 1, могут быть отдалены от системы антенны и детектора, описанной выше. При такой организации системы, обнаруженные сигналы ЭМП будут передаваться к удаленному модулю-анализатору 14 для дальнейшей обработки.
Также следует иметь в виду, что описанные модули могут быть реализованы машиночитаемым носителем, включающим управляющие программы, которые, при выполнении их машиной, позволяют ей осуществлять любой из описанных способов.
В другом частном варианте выполнения, модули могут быть реализованы с использованием программно-аппаратных средств, специально запрограммированных для выполнения описанного здесь способа.
Следует иметь в виду, что варианты выполнения настоящего изобретения не ограничены только такой структурой, и могут в равной мере найти применение в распределенной структуре, либо в структуре с равноправными узлами. Таким образом, описанные модули могут быть расположены на одном или более серверах, управляемых одной или более системами.
Также следует понимать, что в любом из описанных вариантов, модули могут формировать физическую аппаратуру с физическими модулями, специализированными для выполнения шагов описанного здесь способа.
В любом случае, измеренные данные запоминаются в запоминающем устройстве 18 и используются в модуле-анализаторе 14.
В модуле-анализаторе 14 обнуляется любое смещение частоты путем удаления линейной зависимости данных от частоты. Отсчеты мощности обрабатываются функцией, убирающей из данных линейную тенденцию наилучшего приближения к прямой линии. Сигнал центрируется относительно своего среднего значения и выравнивается для удаления смещения по частоте в соответствии с выражением:
Amplitude (dBm) = detrend(Amplitude)dBm) + mean(Amplitude(dBm))).
О наличии сигналов помехи в частотном интервале можно судить по характеру вертикальной диаграммы в конкретном частотном диапазоне. Эта помеха подвергается обнулению.
Выполняется подсчет количества точек, в которых превышено среднее значение на некоторую пороговую величину в децибелах. Эти значения суммируются и делятся на общее число точек, для получения величины интенсивности. Другими словами, величину интенсивности для каждого направления получают подсчетом числа пиков, превышающих порог. Пороговые значения составляют, например, 3 дБ или 10 дБ над средним уровнем сигнала. График интенсивности получают для каждой позиции. Диаграммы направленности могут иметь острый минимум в главном лепестке. Для получения более плавных диаграмм выполняют усреднение по каждым трем смежным оборотам.
Позиции, где выполняются измерения, также наносятся или изображаются на аэрофотографии (фиг. 3). После выполнения всех измерений в данной позиции, система перемещается в несколько других позиций, и в каждой из них выполняется та же процедура. В каждой позиции также определяются GPS координаты.
После того, как собраны все данные, для определения направления, на котором возникли принятые сигналы ЭМП, используется процессор 20, и для триангуляционного определения места расположения потенциально поврежденного оборудования, или "горячих точек", используется программа обработки сигнала, управляющая процессором. Система также выдает GPS координаты (широту и долготу) потенциально поврежденного оборудования, как это будет описано ниже.
В одном примере, процессором 20 является программируемый контроллер, используемый для управления системой и обработки данных измерений.
GPS координаты места повреждения определяются в соответствии с описанной ниже процедурой, однако следует иметь в виду, что существуют различные методы и алгоритмы получения тех же или сходных результатов.
Прежде всего, здесь используются две системы координат, GPS и декартовы координаты (пиксельная система координат).
Для каждой подстанции имеется заранее подготовленная аэрофотография, обладающая заданным разрешением и размером, которые соответствуют пиксельной, или декартовой, системе координат данной конкретной известной фотографии. Такая фотография может быть получена из любого источника или любым средством цифровой картографии, например Google Maps. Масштаб фотографии может быть выбран, исходя из требований технологии обработки, или инструмента, или процессора 20.
Для того чтобы привязать пиксельную координатную систему к GPS координатной системе, вначале выбирают GPS опорные точки. Затем выполняют обработку информации, собранной с использованием описанных выше данных по направлениям, данных GPS и данных по ЭМП, для формирования диаграммы распределения интенсивности, размер которой основывается на пиксельных координатах и размере спутниковой фотографии. В диаграмме распределения интенсивности используются различные цвета для обозначения разной степени серьезности источников ЭМП, как более подробно будет рассмотрено ниже.
В процессоре 20 диаграмма распределения интенсивностей накладывается на фотографию для получения диаграммы "фотоизображение-интенсивность" При этом все GPS координаты преобразуются в декартовы координаты.
Затем диаграмма "фотоизображение-интенсивность" подвергается обработке для идентификации точек максимальной интенсивности вокруг конкретных источников ЭМП и обнуления всех остальных точек. После идентификации этих точек, они изображаются квадратами па фотографии, а их декартовы, или пиксельные, координаты преобразуются обратно в GPS координаты.
Другими словами, местоположение поврежденного оборудования может быть определено посредством наложения диаграммы распределения интенсивности на спутниковую фотографию. Диаграмма распределения интенсивности основана на направлении и интенсивности (описано ниже), в то время как в основе фотографии лежат пиксельные координаты. Путем их сочетания можно вычислить GPS координаты по пиксельным координатам.
Что касается фигурных маркеров на фиг. 3, то три маркера круглой формы на изображении справа представляют собой опорные точки, необходимые для определения GPS координат мест повреждения. GPS координаты этих мест в подстанции известны, и используются для привязки пиксельной системы координат к GPS координатной системе.
Можно вычислить GPS координаты, используя только две точки, а третью точку использовать в качестве опорной для проверки алгоритма. Квадратами обозначены источники ЭМП. Они показывают соответствующие GPS координаты места расположения повреждения.
Для обозначения различной степени серьезности источников могут быть использованы различные цвета, например, красным цветом может обозначаться более крупный или более серьезный источник, а желтым цветом может обозначаться менее серьезный источник.
Следует иметь в вид, что обозначения опорных точек и мест расположения повреждений могут иметь любую форму, размер или цвет. Также имеется возможность представления изображения повреждений с более низким разрешением, например полной диаграммы "фотоизображение-интенсивность". Также возможно визуальное представление информации о мощности и частотном спектре, используемой процессором 20.
Местоположение этих источников может быть найдено с помощью GPS приемника или вычислителя GPS координат, например Google Maps.
Пиксельные координаты любой точки в изображении на фиг. 3 также могут быть определены посредством численных методов. Используя известные GPS координаты опорных точек и известные пиксельные координаты фигурных маркеров, по изменению пиксельных координат можно определить изменение GPS координат.
GPS координаты опорной точки 1 определяются верхним маркером и известны.
GPS координаты опорной точки 2 определяются маркером справа и известны.
Разница GPS координат = GPS координаты опорной точки 2 - GPS координаты опорной точки 1.
С другой стороны, используя пиксельные данные на диаграмме, получаем:
Пиксельные координаты опорной точки 1 определяются верхним маркером и известны.
Пиксельные координаты опорной точки 2 определяются маркером справа и известны.
Разница пиксельных координат = Пиксельные координаты опорной точки 2 - Пиксельные координаты опорной точки 1.
Теперь могут быть вычислены пиксельные координаты места расположения повреждения.
Изменение величины пиксельных координат = Пиксельные координаты места повреждения - Пиксельные координаты опорной точки 1.
Изменение величины GPS координат = (Изменение величины пиксельных координат × Разница GPS координат) ÷ Разница пиксельных координат
GPS координаты повреждения = GPS координаты опорной точки 1 ÷ Изменение величины GPS координат.
Следует понимать, что существуют и другие способы совместного использования этих координат для получения тех же или аналогичных результатов.
Данные по ЭМП, конкретно, данные по мощности, частоте и угловым координатам, используются алгоритмом определения направления, использующим различные GPS координаты, собранные в процессе проведения измерений. Информация о направлениях, полученная в измерениях одиночной мобильной системой в разных позициях, объединяется для определения положения источника ЭМП методом триангуляции. При этом устанавливается направление, с которого были переданы принятые сигналы.
Подстанция делится координатной сеткой, каждая ячейка которой имеет определенную площадь. Все ячейки имеют одинаковую площадь. Каждой точке присваивается величина, пропорциональная оценке излучаемой из нее мощности. Добавление в некоторую точку значений, полученных от измерений в каждой позиции, производится после выполнения нормализации совокупности данных измерения в каждой позиции относительно максимума, т.е., максимального числа пиков, подсчитанных в некотором направлении в данной позиции. Затем полученные совокупности данных измерения используются для формирования диаграммы интенсивности, или сетки расположения источников.
Затем диаграмма интенсивности делается прозрачной и накладывается на спутниковую фотографию подстанции, как это было описано выше.
После того, как была получена прозрачная сетка расположения источников и наложена на спутниковую фотографию подстанции, область, охватывающая поврежденное оборудование, может все еще оставаться достаточно большой, с большим числом единиц оборудования, заключенных в ней. При этом идентификация источника излучения еще затруднена. Внутри каждой площадки или ограниченной области имеется по меньшей мере одна точка/место с максимальной мощностью излучения. Велика вероятность того, что это конкретное место и является источником излучения. Поэтому, если все остальные точки внутри этих больших областей будут обнулены и останется только эта точка максимума, будет значительно проще обнаружить поврежденное оборудование благодаря значительно более высокому разрешению. Поверх этой точки может быть наложен квадрат для обеспечения обнаружения повреждения с высоким разрешением.
На выходе системы получается прозрачная диаграмма распределения интенсивности, наложенная на спутниковую фотографию подстанции.
Все, что остается обслуживающему персоналу подстанции, чтобы попасть в точку с определенными координатами, это воспользоваться GPS приемником.
В одном частном варианте выполнения, построение диаграммы распределения интенсивности на спутниковой фотографии подстанции с учетом масштаба, различных систем координат, географического положения подстанции и т.д., может быть выполнено следующим образом.
В ходе измерений определяются GPS координаты каждой позиции, в которой выполняются измерения. Эти координаты должны быть в десятичном GPS формате. Эти координаты преобразуются в декартовы координаты для их нанесения на спутниковые фотографии подстанции.
Окружность Земли составляет 40041000 м.
Находят среди всех позиций проведения измерений GPS координату с минимальной величиной, т.е., locMin_latitude и locMin_longitude
Находят среди всех позиций проведения измерений GPS координату с максимальной величиной, т.е., locMax_latitude и locMax_longitude
Находят GPS координату самой левой точки подстанции, т.е., borderMin_latitude и borderMin_longitude
Находят GPS координату самой правой точки подстанции, т.е., borderMax_latitude и borderMax_longitude
Эта координата преобразуется в декартовы координаты следующим образом
borderMax_Cartesian_y = borderMax_latitude - borderMin_latitude × 40041000/360.
borderMax_Cartesian_x = borderMax_longitude - borderMin_longitude × 40041000/360 × cos(borderMax_latitude)
Аргументом функции косинуса в данном выражении является значение borderMax_latitude в градусах.
Относительные значения координат всех десятичных GPS координат для всех позиций измерения определяют следующим образом:
coordRel_latitude = GPS координата по широте позиции измерения - borderMin_latitude
coordRel_longitude = GPS координата по долготе позиции измерения - borderMin_longitude
Декартовы координаты всех позиций измерения определяют следующим образом
coordCar_у = coordsRel_latitude × 40041000/360
coordCar_х - coordsRcl_longitude × 40041000/360 × cos (GPS координата по широте позиции измерения)
Определяют величину шага, т.е., step = 0,8
Декартовы координаты округляются до ближайшего шага с использованием округления функции
coordCar_у = round (coordCar_y/step) × step
coordCar_х = round (coordCar_x) × step
borderMax_Cartesian_y = round (borderMax_Cartesian_y/step) × step
borderMax_Cartesian_x = round (borderMax_Cartesian_x/step) × step
Далее используется функция, преобразующая определенную выше область в матрицы, которые могут быть использованы для оценки функций двух переменных и трехмерных диаграмм.
envGridX и envGridY = meshgrid (0:step:borderMax_Catesian_x, 0:steps:borderMaxCar_y)
Определяют положение опорного угла
angleRef = 65,41842551743129
Для обработки сетки используются следующие уравнения.
angleRefCorrect = [0 0 0 0 0 0 0 0 0 0 0 0 0 0]
rWeight = 0
Для каждой позиции измерения
thetaGrid {location} = Four Quadrant Inverse Tan Function (envGridY-coordsCar (location,2), envGridX-coordsCar (location, 1))/pi*180+angleRef % угол между координатной сеткой на местности и базой измерений
thetaGrid{location}(thetaGrid{location}<0)=thetaGrid{location}(thetaGrid{location}<0)+360;
thetaGridlndex{location}=round(thetaGrid{location}/3+1);
thetaGridlndex{location}(thetaGridIndex{location}>length(angle))=thetaGridIndex{location}(thetaGridIndex{location}>length(angle))-length(angle);
rGrid{location}=sqrt((envGridX-coordsCar(location,1)).^2+(envGridY-coordsCar(location,2)).^2);
for k = 1:size(rGrid{locations(1)},2)
rProx{location}(:,k)=rGrid{location}(:,k)<200;
rZero{location}(:,k)=250^10./(250^10+(rGrid{location}(:,k)).^10);
rWeight = rWeight + rZero {location};
end
rWeight = rWeight/length(locations)+1;
Для каждой позиции
[cartPatPeakX{location} cartPatPeakY{location}]=pol2cart((angle-angleRef-angleRefCorrect(location))/180*pi,patternPeak{location});
[cartPatPeakXNorm{location} cartPatPeakYNorm{location}]=pol2cart((angle-angleRef-angleRefCorrect(location))/180*pi,patternPeakNorm{location});
Для определения местоположения источника излучения используют следующую процедуру
sourceEstimate3 = zeros(size(thetaGridIndex {handles, locations(1)}))
sourceEstimate3 = sourceEstimate3 + patternPeakNorm {location}(thetaGridlndex{location});
sourceEstimate3 = sourceEstimate3/max(max(sourceEstimate3));
Способ и система мониторинга сигналов от вала вращающейся машины
Устройство мониторинга частичных разрядов

