Результат интеллектуальной деятельности: УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству определения позиции транспортного средства и к способу определения позиции транспортного средства для определения позиции транспортного средства.
Уровень техники
[0002] В качестве технологии для коррекции текущей позиции транспортного средства, обнаруженной посредством устройства измерения позиции, предложена технология, которая корректирует позицию транспортного средства посредством нахождения расстояния от транспортного средства до перекрестка с использованием камеры, смонтированной на транспортном средстве, и затем идентификации позиции транспортного средства относительно перекрестка в картографической информации (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер Hei 9-243389
Раскрытие изобретения
Техническая задача
[0004] Тем не менее, технология, описанная в патентном документе 1, может не позволять корректировать текущую позицию транспортного средства в ситуациях, когда затруднительно обнаруживать перекресток, к примеру, когда транспортное средство движется на скоростной автомагистрали.
[0005] С учетом этой проблемы, настоящее изобретение направлено на предоставление устройства определения позиции транспортного средства и способа определения позиции транспортного средства, допускающих точную коррекцию текущей позиции транспортного средства в различных окружениях движения.
Решение задачи
[0006] Устройство определения позиции транспортного средства идентифицирует зону, в которой расположен наземный объект, который должен служить в качестве цели распознавания, в картографической информации на основе предварительно определенного состояния, распознает в захваченном изображении наземный объект в идентифицированной зоне, вычисляет относительную позицию транспортного средства относительно позиции наземного объекта и корректирует текущую позицию транспортного средства. Устройство определения позиции транспортного средства идентифицирует первую зону в качестве зоны, когда скорость транспортного средства, определенная посредством детектора скорости, ниже предварительно определенного порогового значения, причем первая зона представляет собой зону от первого значения до второго значения, превышающего первое значение по расстоянию от транспортного средства, и идентифицирует вторую зону в качестве зоны, когда скорость транспортного средства выше порогового значения, причем вторая зона представляет собой зону от первого значения до третьего значения, превышающего второе значение по расстоянию от транспортного средства.
Краткое описание чертежей
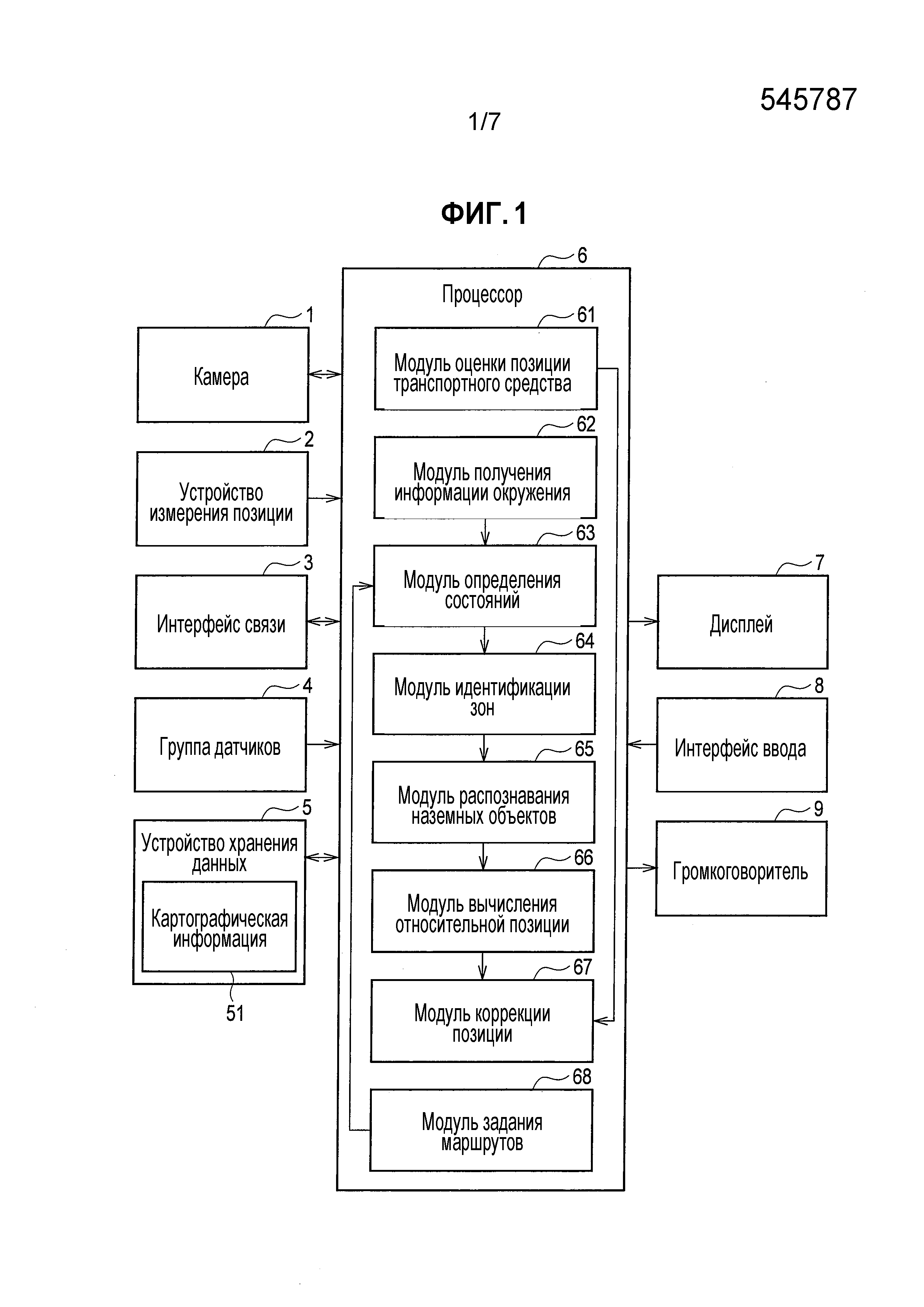
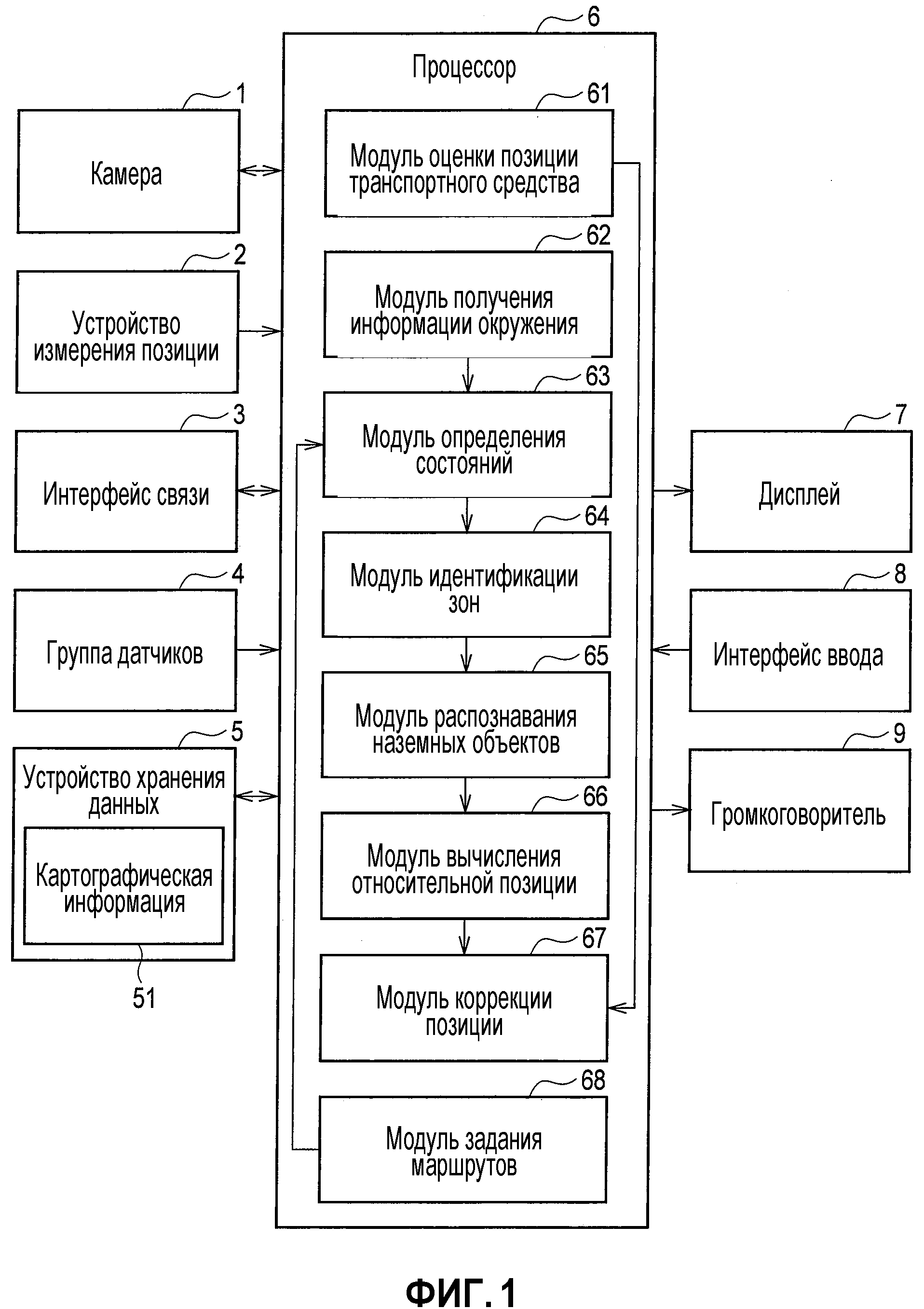
[0007] Фиг. 1 является блок-схемой, иллюстрирующей примерную конфигурацию устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
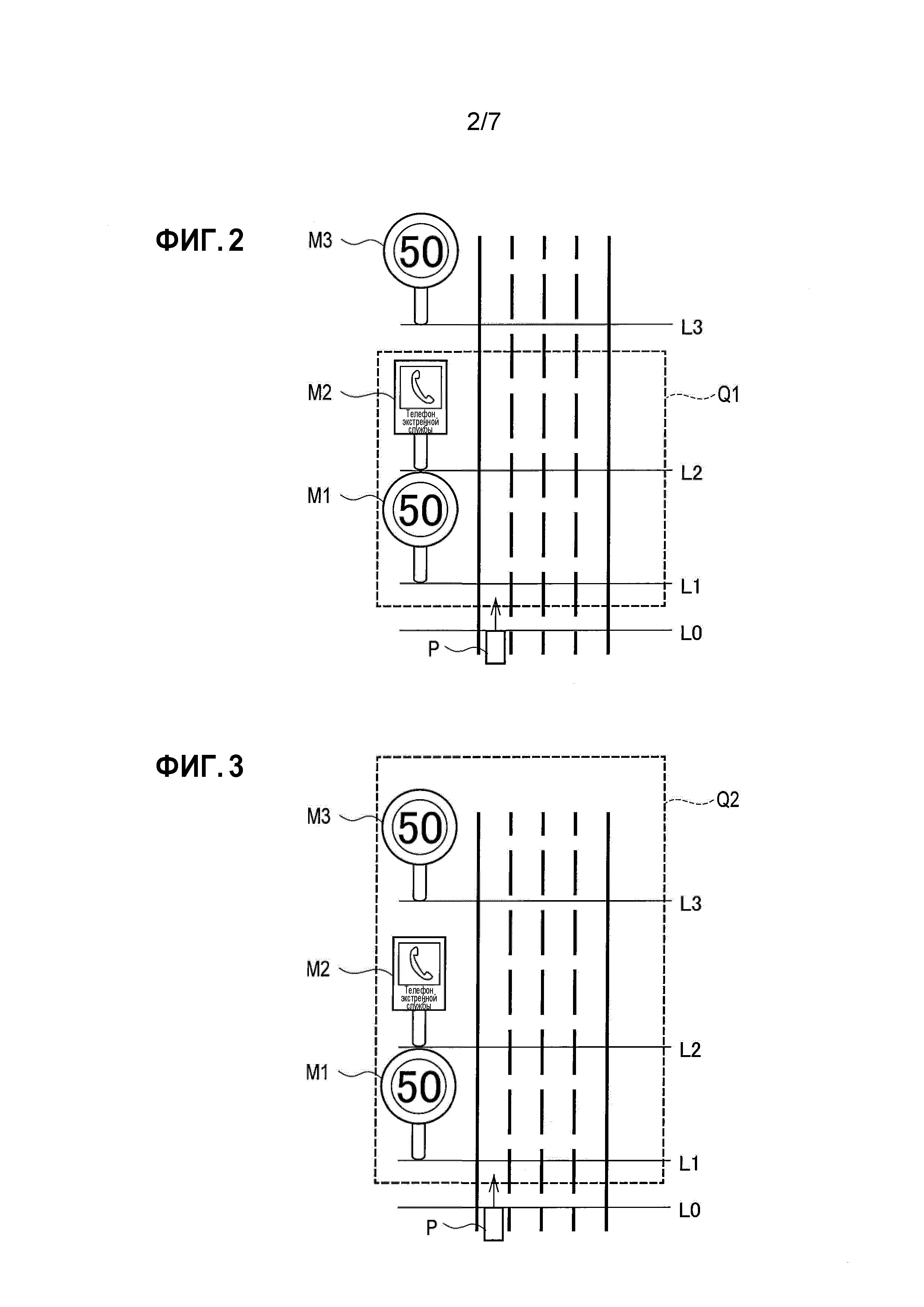
Фиг. 2 является схемой, иллюстрирующей зону, идентифицированную посредством модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 3 является схемой, иллюстрирующей зону, идентифицированную посредством модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
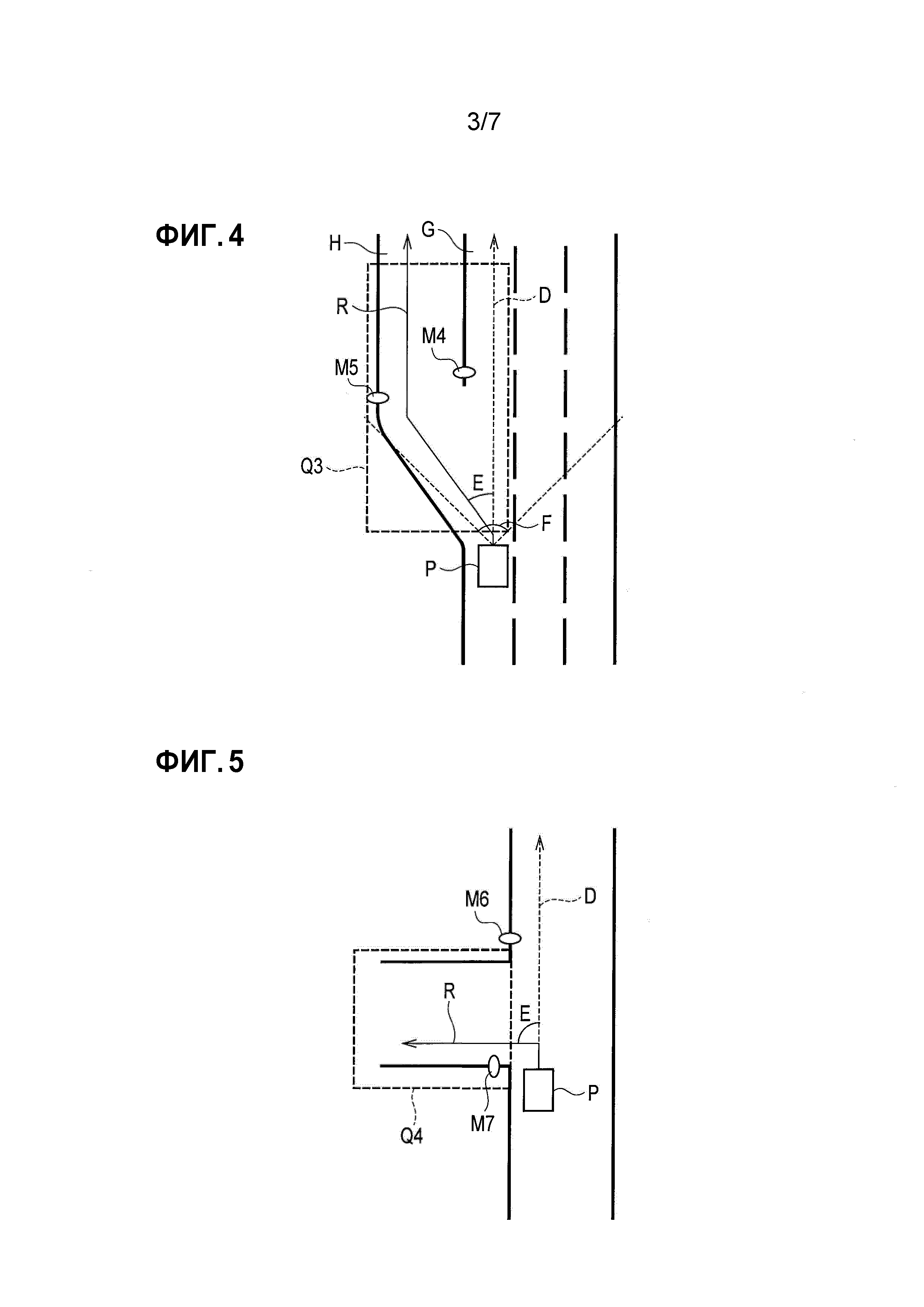
Фиг. 4 является схемой, иллюстрирующей зону, идентифицированную посредством модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 5 является схемой, иллюстрирующей зону, идентифицированную посредством модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
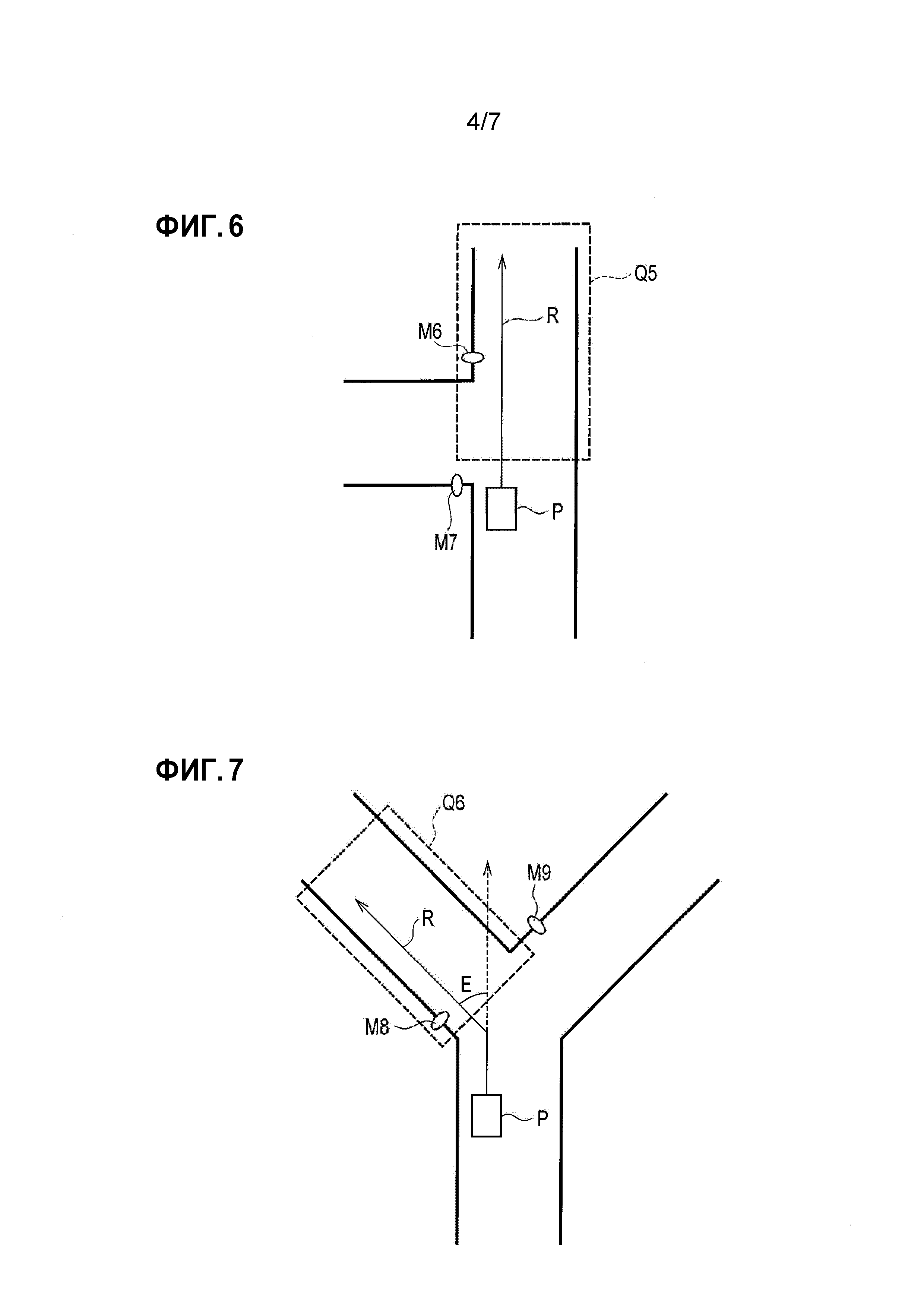
Фиг. 6 является схемой, иллюстрирующей зону, идентифицированную посредством модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 7 является схемой, иллюстрирующей зону, идентифицированную посредством модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
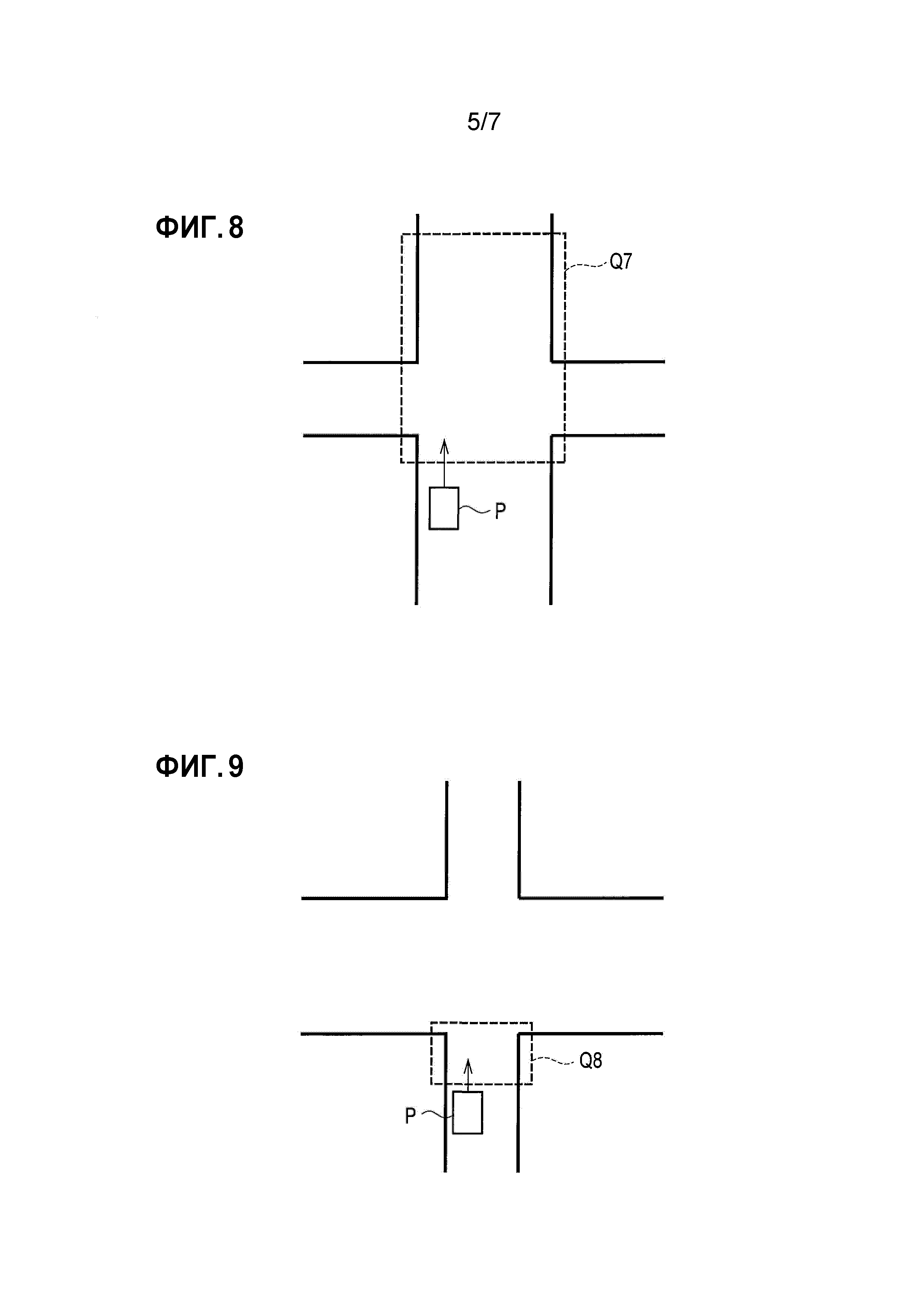
Фиг. 8 является схемой, иллюстрирующей зону, идентифицированную посредством модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 9 является схемой, иллюстрирующей зону, идентифицированную посредством модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
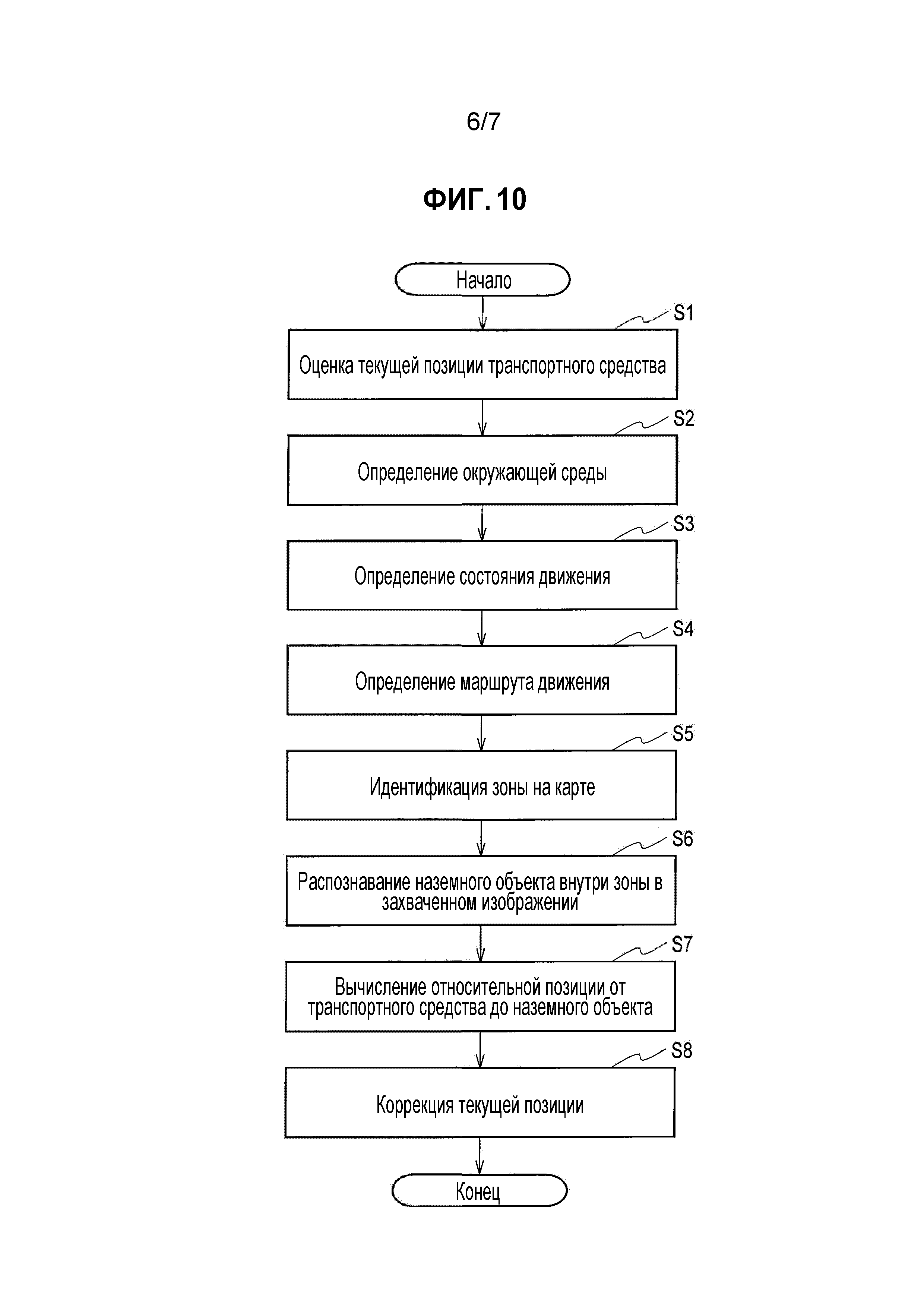
Фиг. 10 является блок-схемой последовательности операций способа обработки, выполняемой посредством устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения.
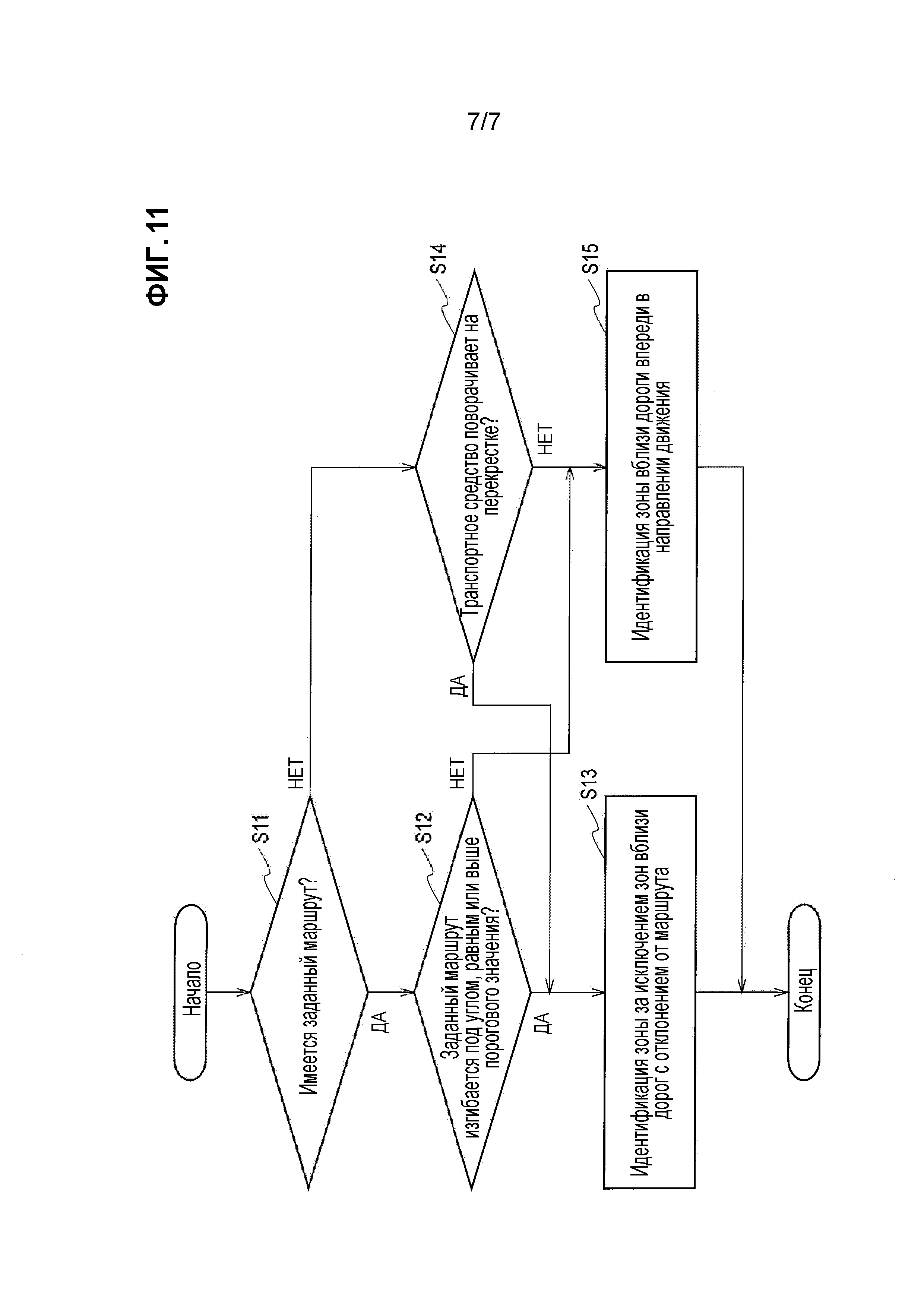
Фиг. 11 является блок-схемой последовательности операций способа обработки, выполняемой посредством модуля определения состояний и модуля идентификации зон устройства определения позиции транспортного средства согласно варианту осуществления настоящего изобретения, причем обработка связана с маршрутом движения.
Подробное описание вариантов осуществления
[0008] Ниже описывается вариант осуществления настоящего варианта осуществления со ссылкой на чертежи. На всех чертежах, идентичные или аналогичные ссылки с номерами обозначают идентичные или аналогичные элементы, и перекрывающиеся описания опускаются.
[0009] Устройство определения позиции транспортного средства
Как показано на фиг. 1, устройство определения позиции транспортного средства согласно настоящему варианту осуществления включает в себя камеру 1, устройство 2 измерения позиции, интерфейс (интерфейс) 3 связи, группу 4 датчиков, устройство 5 хранения данных, процессор 6, дисплей 7, интерфейс 8 ввода и громкоговоритель 9. Устройство определения позиции транспортного средства согласно варианту осуществления настоящего изобретения устанавливается в транспортном средстве P (см. фиг. 2-9) и определяет текущую позицию транспортного средства P.
[0010] Камера 1 захватывает изображения окрестности транспортного средства P. С использованием, например, твердотельного элемента съемки изображений, такого как CCD или CMOS, камера 1 формирует цифровые изображения, которые могут подвергаться обработке изображений. Камера 1 выводит захваченные изображения в процессор 6 последовательно. Камера 1 может представлять собой стационарную камеру, которая захватывает изображения зоны впереди транспортного средства P, или камеру с обзором на 360 градусов, которая захватывает изображения с обзором на 360 градусов вокруг транспортного средства P. Альтернативно, камера 1 может вращаться в направлении, по меньшей мере, одного из панорамирования, наклона и наклона в поперечном направлении и/или выполнять увеличение и уменьшение масштаба, под управлением процессора 6.
[0011] Устройство 2 измерения позиции измеряет текущую позицию с использованием системы измерения позиции, такой как глобальная система позиционирования (GPS). Устройство 2 измерения позиции формируется, например, посредством приемного GPS-устройства. Устройство 2 измерения позиции выводит измеренные текущие позиции в процессор 6 последовательно.
[0012] Интерфейс 3 связи представляет собой, например, модуль связи, который передает и принимает сигналы в/из внешней среды в беспроводном режиме. Интерфейс 3 связи принимает различные виды информации из внешней среды, например, через интеллектуальную транспортную систему (ITS), которая передает информацию в реальном времени, к примеру, информацию о пробках, информацию дорожного движения, такую как информация управления движением и информация о погоде. ITS включает в себя систему автомобильной информации и связи (VICS, зарегистрированная торговая марка), телематику и т.п. Интерфейс 3 связи выводит принимаемую информацию в процессор 6 последовательно.
[0013] Группа 4 датчиков может включать в себя датчик скорости, датчик ускорения, датчик угловой скорости, датчик угла поворота при рулении и т.п. Датчики в группе 4 датчиков определяют скорость транспортного средства P и трехосное ускорение, угловую скорость и т.п. транспортного средства P в трехмерной декартовой системе координат и выводят результаты определения в процессор 6 последовательно. Группа 4 датчиков может включать в себя датчик расстояния, к примеру, лазерный дальномер (LRF), который обнаруживает расстояние от транспортного средства P до цели, и направление транспортного средства P относительно цели, датчик ориентации, который обнаруживает ориентацию транспортного средства P, и т.п.
[0014] Устройство 5 хранения данных сохраняет картографическую информацию 51, содержащую позиции и типы наземных объектов, расположенных вблизи дорог. Устройство 5 хранения данных может формироваться посредством полупроводникового запоминающего устройства, магнитного диска и т.п. Помимо этого, устройство 5 хранения данных может сохранять программы, необходимые для обработки, выполняемой посредством процессора 6. Устройство 5 хранения данных может формироваться посредством одного или более аппаратных элементов.
[0015] Картографическая информация 51 имеет записанную информацию дороги, информацию инфраструктурных объектов и т.п. Картографическая информация 51 имеет записанную информацию наземных объектов, причем информация наземных объектов включает в себя позиции, размеры, типы и т.п. различных наземных объектов, расположенных вблизи дорог. Наземные объекты вблизи дорог включают в себя дорожные знаки, такие как знаки, уведомляющие об ограничении скорости, позиции остановки, одностороннем движении, пешеходном переходе и запрете парковки, линии деления проезжей части дороги, такие как линии, указывающие стоп-линию, пешеходный переход, уведомление о приближении к пешеходному переходу и граничную линию, и информационные указатели, такие как указатели, предоставляющие информацию относительно направления, зон обслуживания и зон парковки (зон отдыха), пересечения дорог и различных инфраструктурных объектов. В дополнение к ним, наземные объекты включают в себя указатели расстояния, светофоры, телеграфные столбы, туннели, мосты, опоры мостов, площадки для экстренной парковки, телефоны экстренных служб, пункты взимания платы за проезд, портальные краны, дорожные сооружения, к примеру, железные дороги и инфраструктурные объекты.
[0016] Процессор 6 включает в себя модуль 61 оценки позиции транспортного средства, модуль 62 получения информации окружения, модуль 63 определения состояний, модуль 64 идентификации зон, модуль 65 распознавания наземных объектов, модуль 66 вычисления относительной позиции, модуль 67 коррекции позиции и модуль 68 задания маршрутов. В качестве заданного маршрута, модуль 68 задания маршрутов задает маршрут движения транспортного средства P в картографической информации 51 из текущей позиции транспортного средства P в пункт назначения.
[0017] Процессор 6 может формироваться посредством микроконтроллера, который представляет собой интегральную схему, включающую в себя, например, центральный процессор (CPU), запоминающее устройство, интерфейс ввода-вывода и т.п. В этом случае, CPU выполняет компьютерные программы, установленные заранее в микроконтроллере, чтобы реализовывать информационные процессоры (61-68), составляющие процессор 6. Составляющие процессора 6 могут формироваться посредством одного аппаратного элемента или посредством отдельных аппаратных элементов. Микроконтроллер может выполнять вторую функцию в качестве электронного модуля управления (ECU), используемого для управления другими аспектами транспортного средства P, такими как, например, управление автономным вождением.
[0018] Модуль 61 оценки позиции транспортного средства оценивает текущую позицию транспортного средства P в картографической информации 51 на основе текущей позиции, измеряемой посредством устройства 2 измерения позиции, и количества движения транспортного средства P, вычисленного с использованием результатов обнаружения из группы 4 датчиков.
[0019] Модуль 62 получения информации окружения получает, из интерфейса 3 связи, информацию дорожного движения, информацию о погоде и т.п. относительно области, в которой в данный момент движется транспортное средство P.
[0020] Модуль 63 определения состояний определяет состояние движения транспортного средства P на основе, по меньшей мере, одного из изображения, захваченного посредством камеры 1, результатов обнаружения из группы 4 датчиков, текущей позиции транспортного средства P, оцененной посредством модуля 61 оценки позиции транспортного средства, информации, полученной посредством модуля 62 получения информации окружения, и маршрута движения, заданного посредством модуля 68 задания маршрутов. Состояние движения, определенное посредством модуля 63 определения состояний, включает в себя, по меньшей мере, одно из окружающей среды, к примеру, погоду, временной отрезок, состояние поверхности дороги и местоположение движения, состояния движения, к примеру, статуса движения и полосы движения, и маршрута движения транспортного средства P.
[0021] Модуль 63 определения состояний определяет погоду, к примеру, то, сейчас, например, солнечно, дождливо, снежно или туманно, на основе информации о погоде и т.п., полученной из модуля 62 получения информации окружения. Модуль 63 определения состояний может определять погоду на основе других факторов, таких как результат обнаружения из датчика капель дождя, который может иметь группа 4 датчиков, либо из того, приводится в действие и как приводится в действие стеклоочиститель транспортного средства P. Модуль 63 определения состояний определяет временной отрезок, т.е. то, сейчас день или ночь, на основе текущего времени относительно времени восхода солнца и времени заката, результата обнаружения из датчика освещенности, который может иметь группа 4 датчиков, и т.п.
[0022] На основе информации о погоде, полученной из модуля 62 получения информации окружения, изображения, захваченного посредством камеры 1 и т.п., модуль 63 определения состояний определяет состояние поверхности дороги для дороги, по которой движется транспортное средство P, к примеру, мокрая, заснеженная, обледеневшая дорога или дорога в плохом состоянии, которая заасфальтирована, но чем-то покрыта. Модуль 63 определения состояний может определять состояние поверхности дороги на основе результата обнаружения из датчика скольжения, который может иметь группа 4 датчиков, причем датчик скольжения обнаруживает скольжение колеса на транспортном средстве P. Модуль 63 определения состояний также определяет местоположение движения транспортного средства P, к примеру, городской район, пригородный район, скоростная автомагистраль, общая дорога или горная дорога, на основе текущей позиции, оцененной посредством модуля 61 оценки позиции транспортного средства.
[0023] Модуль 63 определения состояний определяет статус движения, к примеру, движение на скоростной автомагистрали (или автомагистрали с ограниченным проездом) и затор в движении, на основе информации дорожного движения, полученной из модуля 62 получения информации окружения. Модуль 63 определения состояний может определять статус движения, к примеру, то, движется транспортное средство P на высоких скоростях или на низких скоростях, на основе результата обнаружения из датчика скорости, который имеет группа 4 датчиков. Альтернативно, модуль 63 определения состояний может определять то, что возникает затор в движении, когда расстояния от транспортного средства P до впереди идущего транспортного средства и позади идущего транспортного средства, вычисленные на основе изображений, захваченных посредством камеры 1, остаются короткими в течение предварительно определенного периода времени.
[0024] Модуль 63 определения состояний определяет полосу движения, к примеру, правую полосу движения, левую полосу движения или центральную полосу движения между правой и левой полосами движения, на основе изображений, захваченных посредством камеры 1, текущую позицию, оцененную посредством модуля 61 оценки позиции транспортного средства, количество движения транспортного средства P, вычисленное с использованием результатов обнаружения из группы 4 датчиков, и т.п.
[0025] Модуль 63 определения состояний также выполняет определение в отношении маршрута движения транспортного средства P, к примеру, того, задан или нет маршрут движения посредством модуля 68 задания маршрутов. Если имеется заданный маршрут, заданный посредством модуля 68 задания маршрутов, модуль 63 определения состояний определяет, на основе заданного маршрута, то, изгибается или нет заданный маршрут под углом с предварительно определенным пороговым значением или выше. Если отсутствует заданный маршрут, модуль 63 определения состояний определяет, на основе направления, указываемого посредством сигнала поворота, или на основе полосы движения транспортного средства P, то, собирается или нет транспортное средство выполнять поворот на перекрестке.
[0026] На основе состояния(й) движения, определенного посредством модуля 63 определения состояний, модуль 64 идентификации зон идентифицирует, в картографической информации 51, зону Q (см. фиг. 2-9) в качестве диапазона, в пределах которого расположен наземный объект, который должен служить в качестве цели распознавания. Например, модуль 64 идентификации зон идентифицирует зону Q вблизи дороги впереди транспортного средства P в направлении движения.
[0027] Модуль 65 распознавания наземных объектов распознает, в изображении, захваченном посредством камеры 1, наземный объект, расположенный в зоне Q, идентифицированной посредством модуля 64 идентификации зон. Модуль 65 распознавания наземных объектов распознает наземный объект, соответствующий наземному объекту в зоне Q в картографической информации 51, посредством выполнения предварительно определенной обработки изображений для изображения, захваченного посредством камеры 1, такой как обнаружение краев или сопоставление с шаблоном, которое вычисляет подобия с сохраненным заранее шаблоном. Модуль 65 распознавания наземных объектов ассоциирует распознанный наземный объект с наземным объектом, расположенным в зоне Q, в картографической информации 51, идентифицированной посредством модуля 64 идентификации зон. Модуль 65 распознавания наземных объектов также вычисляет, на основе изображения, захваченного посредством камеры 1, направление распознанного наземного объекта относительно транспортного средства P и расстояние от транспортного средства P до наземного объекта. Модуль 65 распознавания наземных объектов может получать расстояние и направление относительно распознанного наземного объекта с использованием, например, LRF, который может иметь группа 4 датчиков.
[0028] Например, когда состояние движения, определенное посредством модуля 63 определения состояний, указывает движение на низкой скорости, что означает движение на скоростях ниже предварительно определенного порогового значения, модуль 64 идентификации зон идентифицирует зону Q1, как показано на фиг. 2, в зоне вблизи дороги впереди транспортного средства P в направлении движения. В примере, показанном на фиг. 2, зона Q1 представляет собой зону от L1 до L2, указывающую расстояние от позиции L0 транспортного средства P. Например, во время движения на низкой скорости, модуль 65 распознавания наземных объектов, который может распознавать наземный объект, отстоящий от транспортного средства P на L3 или более, модуль 64 идентификации зон может задавать верхний предел расстояния от транспортного средства P для зоны Q1 равным L2, которое является относительно коротким (L1<L2<L3), поскольку имеется достаточно времени для того, чтобы распознавать наземный объект. При условии, что имеется дорожный знак M1, телефон M2 экстренной службы и дорожный знак M3 в позициях L1-L3, соответственно, дорожный знак M3 исключается из зоны Q1 в данный момент, показанной на фиг. 2. Поскольку зона Q1 в силу этого идентифицируется эффективно с меньшим числом целей распознавания, меньшая нагрузка по обработке накладывается на модуль 65 распознавания наземных объектов.
[0029] С другой стороны, когда состояние движения, определенное посредством модуля 63 определения состояний, указывает движение на высокой скорости, что означает движение на скоростях, превышающих предварительно определенное пороговое значение, модуль 64 идентификации зон идентифицирует зону Q2, как показано на фиг. 3, в зоне вблизи дороги впереди транспортного средства P в направлении движения, причем зона Q2 охватывает большее расстояние, чем зона Q1. В примере, показанном на фиг. 3, зона Q2 представляет собой зону из позиций L1-L3, каждая из которых указывает расстояние от транспортного средства P. Во время движения на высокой скорости, модуль 64 идентификации зон задает верхний предел расстояния от транспортного средства P для зоны Q2 равным L3, которое превышает L2, поскольку имеется относительно короткое время для модуля 65 распознавания наземных объектов для того, чтобы распознавать наземный объект. Поскольку дорожный знак M3 в силу этого включен в зону Q2 в момент, показанный на фиг. 3, модулю 65 распознавания наземных объектов предоставляется больше времени для того, чтобы распознавать цель распознавания, и в силу этого он может распознавать цель распознавания с большей точностью.
[0030] Когда окружающая среда, определенная посредством модуля 63 определения состояний, указывает то, что сейчас ночь, модуль 64 идентификации зон идентифицирует зону Q1, как показано на фиг. 2, которая меньше зоны Q2 в направлении прохождения дороги, поскольку модуль 65 распознавания наземных объектов распознает дальний объект менее точно ночью, чем днем. С другой стороны, когда окружающая среда, определенная посредством модуля 63 определения состояний, указывает то, что сейчас день, модуль 64 идентификации зон идентифицирует зону Q2, как показано на фиг. 3, которая превышает зону Q1 в направлении прохождения дороги, поскольку модуль 65 распознавания наземных объектов имеет возможность распознавать дальний объект более точно днем, чем ночью. Следует отметить, что L1 на фиг. 2 и 3 указывает кратчайшее расстояние до наземного объекта, распознаваемого посредством модуля 65 распознавания наземных объектов. L1 может задаваться на основе угла обзора камеры 1, типа наземного объекта, который должен служить в качестве цели распознавания, и т.п.
[0031] Если модуль 63 определения состояний определяет то, что маршрут R движения транспортного средства P изгибается относительно прямого направления D под углом E ниже предварительно определенного порогового значения, модуль 64 идентификации зон идентифицирует зону Q3, как показано на фиг. 4, в зоне вблизи дороги впереди точки изгиба маршрута R движения. Если имеется заданный маршрут, заданный посредством модуля 68 задания маршрутов, модуль 63 определения состояний выполняет определение в отношении угла E, как только расстояние от транспортного средства P до точки изгиба заданного маршрута падает до или ниже предварительно определенного порогового значения. Если отсутствует заданный маршрут, модуль 63 определения состояний определяет, на основе направления, указываемого посредством сигнала поворота, полосы движения транспортного средства P и т.п., то, что угол поворота транспортного средства P в картографической информации 51 представляет собой угол E, под которым изгибается маршрут R движения.
[0032] Например, когда транспортное средство P въезжает в полосу H движения сбоку от главной полосы G движения, зона Q3, как показано на фиг. 4, включает в себя наземный объект M4 вблизи главной полосы G движения и наземный объект M5 вблизи полосы H движения сбоку, причем оба объекта расположены около точки расхождения. В этом отношении, наземный объект M4 и наземный объект M5 находятся под углом F обзора камеры 1 и в силу этого являются распознаваемыми посредством модуля 65 распознавания наземных объектов. Таким образом, модуль 64 идентификации зон эффективно идентифицирует зону Q на основе маршрута R движения таким образом, что зона Q может включать в себя наземные объекты, которые предположительно должны быть распознаваемыми, и за счет этого обеспечивает повышение точности распознавания.
[0033] Если модуль 63 определения состояний определяет то, что маршрут R движения транспортного средства P изгибается относительно прямого направления D под углом E, равным или выше предварительно определенного порогового значения, модуль 64 идентификации зон идентифицирует зону Q4, как показано на фиг. 5, в зоне вблизи дороги впереди точки изгиба маршрута R движения за исключением зон вблизи дорог с отклонением от маршрута R движения. Альтернативно, если модуль 63 определения состояний определяет то, что транспортное средство P собирается выполнять поворот на перекрестке, модуль 64 идентификации зон идентифицирует зону Q4 за исключением зон вблизи дорог, которые пересекаются на перекрестке и отклоняются от маршрута R движения. В примере, показанном на фиг. 5, на котором, около перекрестка, наземный объект M6 расположен вблизи дороги впереди в сквозном направлении, и наземный объект M7 расположен вблизи маршрута R движения, наземный объект M6 около дороги, который находится впереди перекрестка и отклоняется от маршрута R движения, исключается из зоны Q4. Поскольку зона Q4 в силу этого идентифицируется эффективно с меньшим числом целей распознавания, меньшая нагрузка по обработке накладывается на модуль 65 распознавания наземных объектов.
[0034] Также в ситуации, в которой транспортное средство P не выполняет поворот, а движется по прямой через перекресток, как показано на фиг. 6, модуль 64 идентификации зон идентифицирует зону Q5 за исключением зон вблизи дорог, которые пересекаются на перекрестке и отклоняются от маршрута R движения. Модуль 64 идентификации зон может налагать меньшую нагрузку по обработке на модуль 65 распознавания наземных объектов посредством исключения из зоны Q5 наземного объекта M7, который с меньшей вероятностью распознается вследствие направления установки наземного объекта M7, помехи и т.п.
[0035] Хотя перекресток, проиллюстрированный в качестве примера на фиг. 5 и 6, представляет собой Т-образный перекресток, перекресток может представлять собой четырехсторонний перекресток или перекресток трех или более дорог, пересекающихся не ортогонально. Например, как показано на фиг. 7, если транспортное средство P выполняет поворот на Y-образном перекрестке под углом E ниже предварительно определенного порогового значения, модуль 64 идентификации зон идентифицирует зону Q6 в зоне вблизи дороги на маршруте R движения за исключением зоны вблизи дороги с отклонением от маршрута R движения. Если имеются наземный объект M8 и наземный объект M9 около Y-образного перекрестка, при этом наземный объект M8 расположен вблизи дороги на маршруте R движения, и наземный объект M9 расположен вблизи дороги с отклонением от маршрута R движения, наземный объект M9 исключается из зоны Q6. Если наземный объект M9 предположительно должен быть распознаваемым из маршрута R движения вследствие ориентации установки, размера и т.п. наземного объекта M9, модуль 64 идентификации зон может идентифицировать зону Q6 таким образом, что она включает в себя наземный объект M9.
[0036] В ситуации, как показано на фиг. 8, на котором имеется четырехсторонний перекресток впереди транспортного средства P в направлении движения, и дорога, по которой движется транспортное средство P, больше по масштабу другой дороги, пересекающейся на перекрестке, модуль 64 идентификации зон идентифицирует зону Q7 в зоне вблизи дороги впереди перекрестка в направлении движения. Масштаб дороги может задаваться на основе ширины дороги или интенсивности движения на дороге. В вышеописанном случае, вероятно, что транспортное средство P должно двигаться по прямой через перекресток. Таким образом, посредством идентификации зоны Q7 в зоне вблизи дороги впереди перекрестка в направлении движения, модуль 64 идентификации зон обеспечивает возможность модулю 65 распознавания наземных объектов эффективно распознавать наземный объект с более высокой точностью распознавания.
[0037] В ситуации, как показано на фиг. 9, если имеется четырехсторонний перекресток впереди транспортного средства P в направлении движения, и дорога, по которой движется транспортное средство P, меньше по масштабу другой дороги, пересекающейся на перекрестке, модуль 64 идентификации зон идентифицирует зону Q8 за исключением зоны вблизи дороги впереди перекрестка в направлении движения. В этом случае, поскольку в вышеописанном случае вероятно то, что транспортное средство P выполняет поворот на перекрестке, модуль 64 идентификации зон идентифицирует зону Q8 за исключением зоны вблизи дороги впереди перекрестка в направлении движения, так что число целей распознавания может эффективно уменьшаться, чтобы налагать меньшую нагрузку по обработке на модуль 65 распознавания наземных объектов.
[0038] Модуль 66 вычисления относительной позиции вычисляет относительную позицию транспортного средства P относительно позиции наземного объекта, распознанного посредством модуля 65 распознавания наземных объектов. Модуль 66 вычисления относительной позиции идентифицирует позицию, в картографической информации 51, наземного объекта, распознанного посредством модуля 65 распознавания наземных объектов, на основе позиции наземного объекта в картографической информации 51, ассоциированной с наземным объектом, распознанным посредством модуля 65 распознавания наземных объектов. Модуль 66 вычисления относительной позиции дополнительно вычисляет относительную позицию транспортного средства P в картографической информации 51 на основе направления и расстояния до наземного объекта, вычисленного посредством модуля 65 распознавания наземных объектов.
[0039] Модуль 67 коррекции позиции корректирует текущую позицию транспортного средства P, оцененную посредством модуля 61 оценки позиции транспортного средства, на основе относительной позиции транспортного средства P, вычисленной посредством модуля 66 вычисления относительной позиции. Другими словами, модуль 67 коррекции позиции определяет текущую позицию транспортного средства P посредством коррекции текущей позиции транспортного средства P, оцененной посредством модуля 61 оценки позиции транспортного средства, на относительную позицию транспортного средства P, вычисленную посредством модуля 66 вычисления относительной позиции.
[0040] Дисплей 7 представляет различные виды информации пассажиру транспортного средства P посредством отображения изображений и/или текста, под управлением процессора 6. Например, дисплей 7 формируется посредством устройства отображения, такого как жидкокристаллический дисплей. Под управлением процессора 6, дисплей 7 может отображать карту, включающую в себя дороги и инфраструктурные объекты, записанную в картографическую информацию 51, и отображать текущую позицию транспортного средства P, скорректированную посредством модуля 67 коррекции позиции, поверх отображаемой карты.
[0041] Например, интерфейс 8 ввода принимает функциональный ввод от пассажира и выводит сигнал в процессор 6 в соответствии с функциональным вводом. Дисплей 7 и интерфейс 8 ввода могут быть сконфигурированы вместе в качестве дисплея с сенсорной панелью. Громкоговоритель 9 представляет, под управлением процессора 6, различные виды информации пассажиру транспортного средства P посредством вывода аудио.
[0042] Способ определения позиции транспортного средства
Со ссылкой на блок-схему последовательности операций способа на фиг. 10, описывается пример того, как работает устройство определения позиции транспортного средства согласно настоящему варианту осуществления.
[0043] На этапе S1, модуль 61 оценки позиции транспортного средства оценивает текущую позицию транспортного средства P в картографической информации 51 посредством коррекции текущей позиции, измеряемой посредством устройства 2 измерения позиции, на основе количества движения транспортного средства P, вычисленного с использованием результатов обнаружения из группы 4 датчиков.
[0044] На этапе S2, модуль 63 определения состояний определяет окружающую среду, которая включает в себя, по меньшей мере, одно из погоды, временного отрезка, состояния поверхности дороги и местоположения движения. На этапе S3, модуль 63 определения состояний определяет состояние движения, включающее в себя, по меньшей мере, одно из статуса движения и полосы движения. На этапе S4, модуль 63 определения состояний определяет маршрут R движения транспортного средства P.
[0045] На этапе S5, на основе условий движения, определенных на этапах S2-S4, модуль 64 идентификации зон идентифицирует зону Q в картографической информации 51 в качестве диапазона, в котором расположена цель распознавания. Например, если определено то, что состояние поверхности дороги является мокрым, заснеженным или плохим, модуль 64 идентификации зон может идентифицировать зону Q сбоку от дороги, поскольку наземный объект на поверхности дороги, такой как дорожный знак, нарисованный на поверхности дороги, затруднительно распознавать. Модуль 64 идентификации зон может идентифицировать зону Q справа от дороги, если полоса движения представляет собой правую полосу движения, поскольку наземный объект справа является более легко распознаваемым, и может идентифицировать зону Q слева от дороги, если полоса движения представляет собой левую полосу движения, поскольку наземный объект слева является более легко распознаваемым. Модуль 64 идентификации зон может идентифицировать зону Q на дороге, если полоса движения представляет собой центральную полосу движения, поскольку наземный объект выше или слева от дороги, которая представляет собой сторону, на которой едут транспортные средства, является более легко распознаваемым.
[0046] Модуль 64 идентификации зон может идентифицировать зону Q всесторонне на основе условий движения, определенных на этапах S2-S4. Например, если определено то, что окружающая среда представляет собой городской район, состояние движения представляет собой движение на низких скоростях, маршрут движения задается, и расстояние до перекрестка, на котором транспортное средство P собирается выполнять поворот, равно или ниже порогового значения, модуль 64 идентификации зон идентифицирует зону Q в зоне вблизи дороги впереди позиции поворота, причем зона Q являются относительно короткой в направлении прохождения дороги. Например, если определено то, что окружающая среда представляет собой ночь, и состояние движения представляет собой движение на высоких скоростях, модуль 64 идентификации зон может определять верхний предел расстояния зоны Q согласно точности распознавания наземных объектов.
[0047] На этапе S6, модуль 65 распознавания наземных объектов распознает наземный объект, расположенный в зоне Q, идентифицированной посредством модуля 64 идентификации зон, в изображении, захваченном посредством камеры 1. На основе изображения, захваченного посредством камеры 1, модуль 65 распознавания наземных объектов также вычисляет направление распознанного наземного объекта относительно транспортного средства P и расстояние от транспортного средства P до распознанного наземного объекта.
[0048] На этапе S7, модуль 66 вычисления относительной позиции вычисляет относительную позицию транспортного средства P относительно позиции, в картографической информации 51, наземного объекта, распознанного посредством модуля 65 распознавания наземных объектов. На этапе S8, на основе относительной позиции транспортного средства P, вычисленной посредством модуля 66 вычисления относительной позиции, модуль 67 коррекции позиции корректирует текущую позицию транспортного средства P, оцененную посредством модуля 61 оценки позиции транспортного средства.
[0049] Идентификация зоны Q на основе маршрута движения
Со ссылкой на блок-схему последовательности операций способа на фиг. 11, пример того, как работают модуль 63 определения состояний и модуль 64 идентификации зон, описывается как способ для идентификации зоны Q на основе определения в отношении маршрута движения, что представляет собой одно из условий движения. Блок-схема последовательности операций способа на фиг. 11 соответствует этапам S4 и S5 блок-схемы последовательности операций способа на фиг. 10.
[0050] На этапе S11, модуль 63 определения состояний определяет то, имеется или нет заданный маршрут, заданный посредством модуля 68 задания маршрутов. Модуль 63 определения состояний инструктирует обработке переходить к этапу S12, если имеется заданный маршрут, или к этапу S14, если отсутствует заданный маршрут.
[0051] На этапе S12, как только расстояние от транспортного средства P до точки изгиба в заданном маршруте падает до или ниже предварительно определенного порогового значения, модуль 63 определения состояний определяет то, равен или выше либо нет угол E, под которым изгибается заданный маршрут, предварительно определенного порогового значения. Модуль 63 определения состояний инструктирует обработке переходить к этапу S13, если угол E равен или выше порогового значения, или к этапу S15, если угол E ниже порогового значения.
[0052] На этапе S14, как только расстояние от транспортного средства P до перекрестка падает до или ниже предварительно определенного порогового значения, модуль 63 определения состояний определяет, на основе направления, указываемого посредством сигнала поворота или полосы движения транспортного средства P, то, собирается или нет транспортное средство P выполнять поворот на перекрестке. Модуль 63 определения состояний инструктирует обработке переходить к этапу S13 при определении того, что транспортное средство P собирается выполнять поворот, или к этапу S15 при определении того, что транспортное средство P не собирается выполнять поворот.
[0053] На этапе S13, модуль 64 идентификации зон идентифицирует зону Q в зоне вблизи дороги на маршруте движения впереди в направлении движения за исключением зоны вблизи дороги с отклонением от маршрута движения. Затем модуль 64 идентификации зон инструктирует обработке переходить к этапу S6 блок-схемы последовательности операций способа на фиг. 10.
[0054] На этапе S15, модуль 64 идентификации зон идентифицирует зону Q в зоне вблизи дороги на маршруте движения впереди в направлении движения. Затем модуль 64 идентификации зон инструктирует обработке переходить к этапу S6 блок-схемы последовательности операций способа по фиг. 10.
[0055] Как описано выше, устройство определения позиции транспортного средства согласно настоящему варианту осуществления корректирует текущую позицию транспортного средства P посредством идентификации зоны Q в картографической информации 51 на основе условий движения транспортного средства P и распознавания различных наземных объектов, расположенных в зоне Q. Устройство определения позиции транспортного средства согласно настоящему варианту осуществления в силу этого может корректировать текущую позицию более часто и поддерживать высокую точность текущей позиции транспортного средства P в различных окружениях движения. Посредством идентификации зоны Q, устройство определения позиции транспортного средства согласно настоящему варианту осуществления может эффективно ограничивать число наземных объектов, которые должны служить в качестве целей распознавания, и в силу этого уменьшать нагрузку по обработке распознавания.
[0056] Посредством идентификации зоны Q, подходящей для окружающей среды транспортного средства P, такой как погода, временной отрезок, состояние поверхности дороги и/или местоположение движения, устройство определения позиции транспортного средства согласно настоящему варианту осуществления может эффективно распознавать наземные объекты, расположенные вблизи дороги, и в силу этого может точно корректировать текущую позицию транспортного средства P. В соответствии с окружающей средой, устройство определения позиции транспортного средства согласно настоящему варианту осуществления может эффективно идентифицировать зону Q, которая включает в себя наземный объект, который предположительно должен быть распознаваемым, за счет этого уменьшая нагрузку по обработке распознавания.
[0057] Посредством идентификации зоны Q, подходящей для состояния движения транспортного средства P, такого как статус движения и/или полоса движения, устройство определения позиции транспортного средства согласно настоящему варианту осуществления может идентифицировать наземные объекты вблизи дороги эффективно и в силу этого точно корректировать текущую позицию транспортного средства P. В соответствии с состоянием движения, устройство определения позиции транспортного средства согласно настоящему варианту осуществления может эффективно идентифицировать зону Q, которая включает в себя наземный объект, который предположительно должен быть распознаваемым, за счет этого уменьшая нагрузку по обработке распознавания.
[0058] Дополнительно, в соответствии с заданным маршрутом, устройство определения позиции транспортного средства согласно настоящему варианту осуществления может эффективно идентифицировать зону Q, которая включает в себя наземный объект, который предположительно должен быть распознаваемым, и точно корректировать текущую позицию транспортного средства, за счет этого уменьшая нагрузку по обработке распознавания.
[0059] Устройство определения позиции транспортного средства согласно настоящему варианту осуществления идентифицирует зону Q в зоне вблизи дороги впереди в направлении движения, когда заданный маршрут указывает то, что транспортное средство P должно поворачивать под углом E ниже предварительно определенного порогового значения. Устройство определения позиции транспортного средства согласно настоящему варианту осуществления в силу этого может эффективно идентифицировать зону Q, которая включает в себя наземный объект, который предположительно должен быть распознаваемым из транспортного средства P, и в силу этого может точно корректировать текущую позицию транспортного средства.
[0060] Кроме того, если транспортное средство P собирается выполнять поворот на перекрестке, устройство определения позиции транспортного средства согласно настоящему варианту осуществления идентифицирует зону Q, которая исключает зоны вблизи дорог с отклонением от маршрута движения, за счет этого уменьшая нагрузку по обработке распознавания.
[0061] Согласно масштабу дороги, по которой движется транспортное средство P, и масштабу пересекающейся дороги, устройство определения позиции транспортного средства согласно настоящему варианту осуществления идентифицирует зону Q в зоне вблизи дороги, на которой с большой вероятностью должно двигаться транспортное средство P. Таким образом, устройство определения позиции транспортного средства согласно настоящему варианту осуществления может точно корректировать текущую позицию транспортного средства и уменьшать нагрузку по обработке распознавания.
[0062] Другие варианты осуществления
Как описано выше, подробности настоящего изобретения раскрыты с использованием варианта осуществления настоящего изобретения. Тем не менее, не следует думать, что описание и чертежи, которые составляют часть этого раскрытия сущности, ограничивают настоящее изобретение. Из этого раскрытия сущности, различные альтернативные варианты осуществления, примеры и рабочие технологии должны становиться очевидными для специалистов в данной области техники.
[0063] Например, в варианте осуществления, описанном выше, когда солнце расположено в направлении захвата изображений, т.е. камера 1 имеет состояние захвата изображений с помощью задней подсветки, модуль 64 идентификации зон может идентифицировать зону Q за исключением зоны с задней подсветкой, поскольку точность для распознавания наземных объектов в такой зоне с задней подсветкой является низкой.
[0064] В варианте осуществления, описанном выше, камера 1 может изменять направление захвата изображений или степень масштабирования под управлением процессора 6, чтобы захватывать изображение наземного объекта в идентифицированной зоне Q. Если, например, размер наземного объекта, который должен служить в качестве цели распознавания, превышает предварительно определенное пороговое значение, модуль 64 идентификации зон может идентифицировать одну зону Q для одного наземного объекта.
[0065] Само собой разумеется, что настоящее изобретение включает в себя различные другие варианты осуществления и т.п., которые не описываются в данном документе, к примеру, конфигурацию, в которой конфигурации, описанные выше, применяются друг к другу. Соответственно, объем настоящего изобретения должен определяться только посредством предметов, которые должны задавать изобретение в объеме формулы изобретения, считающимся надлежащим на основе описания.
Промышленная применимость
[0066] Настоящее изобретение может предоставлять устройство определения позиции транспортного средства и способ определения позиции транспортного средства, допускающие точную коррекцию текущей позиции транспортного средства в различных окружениях движения посредством идентификации зоны, включающей в себя наземный объект, который должен служить в качестве цели распознавания, в соответствии с предварительно определенными состояниями.
Список ссылочных обозначений
[0067] P - транспортное средство
Q, Q1-Q8 - зона
R - маршрут движения
1 - камера
5 - устройство хранения данных
51 - картографическая информация
61 - модуль оценки позиции транспортного средства
64 - модуль идентификации зон
65 - модуль распознавания наземных объектов
66 - модуль вычисления относительной позиции
67 - модуль коррекции позиции
68 - модуль задания маршрутов.
Гнездовая конструкция для зарядки транспортного средства
Схема размещения компонентов транспортного средства
Блок цилиндров и газотермический способ напыления покрытия
Аккумуляторная батарея
Многослойная аккумуляторная батарея и способ ее изготовления
Устройство мониторинга напряжения аккумулятора
Конструкция для установки аккумуляторных батарей транспортного средства
Устройство зарядного порта транспортного средства
Конструкция управления воздушным потоком в пограничном слое транспортного средства
Конструкция управления воздушным потоком в пограничном слое транспортного средства
Устройство поиска маршрута и способ поиска маршрута

