Результат интеллектуальной деятельности: СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к сельскохозяйственному транспортному средству, содержащему систему создания давления в шинах и электронное устройство управления для настройки давления в шинах транспортного средства в зависимости от воспринимаемых датчиками эксплуатационных параметров транспортного средства в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Из уровня техники известны сельскохозяйственные транспортные средства, такие как тракторы, комбайны, полевые измельчители и подобные машины, которые оснащены выполненными различным образом системами создания давления в шинах, чтобы обеспечивать водителю возможность устанавливать желаемое давление в шинах. Как известно, за счет выбора подходящего давления в шинах сельскохозяйственные транспортные средства могут настраиваться на выполнение определенных работ. Так например, тракторы работают на поле с меньшим давлением в шинах, чем при дорожном движении, чтобы при движении по полю за счет увеличенной опорной поверхности (при относительно меньшем давлении в шинах) создавать меньшую нагрузку на почву и, соответственно, вызывать меньшее уплотнение почвы. С другой стороны, при дорожном движении (при относительно более высоком давлении в шинах) за счет меньшего сопротивления качению пары шина-основание обеспечивается значительная экономия топлива. В рамках настоящего описания под упрощенным понятием «давление в шинах» имеется в виду «внутреннее давление в шинах».
Несмотря на наличие известных систем создания давления в шинах, - а вместе с ними и известных технических возможностей настройки желаемого давления в шинах, - для оператора транспортного средства существует трудность в том, чтобы выбрать давление в шинах, действительно подходящее для целей конкретного применения. Для выбора давления в шинах, подходящего для определенной цели применения, необходимо учитывать множество различных факторов, которые к тому же могут изменяться в ходе рабочего процесса. Так например, при выборе давления в шинах должно обеспечиваться, чтобы не превышался предварительно заданный производителем так называемый предел несущей способности шин. При этом пределом несущей способности шин обозначается минимальной допустимое давление в шинах, которое допустимо для определенной нагрузки на колесах и скорости движения.
Однако давление в шинах, которое предпочтительно должно выбираться для определенной ситуации использования, зависит не только от граничных условий, таких как скорость движения и нагрузка на колесах, но также зависит, в частности, от того, какая цель должна достигаться при настройке давления в шинах. Даже для опытного оператора транспортного средства может быть затруднительно выбрать давление в шинах, которое помимо соблюдения граничных условий представляет настройку, подходящую, например, для достижения как можно меньшего потребления топлива или для получения как можно более высокой мощности на единицу площади.
Раскрытие изобретения
Задачей настоящего изобретения является создание сельскохозяйственного транспортного средства, которое обеспечивает автоматическую поддержку для выбора подходящего давления в шинах в различных ситуациях эксплуатации и, следовательно, освобождает водителя транспортного средства от этих действий.
Решение поставленной задачи обеспечивается в сельскохозяйственном транспортном средстве, обладающем признаками по пункту 1 формулы изобретения. Транспортное средство отличается тем, что устройство управления выполнено с возможностью его привода в действие (функционирования) в различных выбираемых оператором рабочих режимах, причем при выборе или посредством выбора одного из рабочих режимов давление в шинах регулируется с учетом стратегии регулирования, относящейся к этому рабочему режиму.
При этом в соответствии с изобретением вначале было осознано, что на практике сельскохозяйственные транспортные средства эксплуатируются с различными стратегическими целевыми установками рабочего использования. Так например, может быть желательно при движении по полю создавать как можно меньшую нагрузку на почву (в частности, вызывать как можно меньшее уплотнение почвы) для сохранения почвы. Альтернативно может быть желательно проводить работу по возможности наиболее эффективно (то есть с низким расходом топлива). Также альтернативно может быть желательно при рабочем использовании развивать как можно более высокое тяговое усилие, например, чтобы получать высокую мощность на единицу площади. Далее, было осознано, что при тяговых работах на поле в зависимости от поставленной цели давление в шинах для цели минимального уплотнения почвы отличается от давления в шинах для цели максимальной эффективности. С другой стороны, если для минимального уплотнения почвы выбирать в принципе наиболее низкое давление в шинах, допустимое по условиям несущей способности шин, оно не будет непременно также оптимальным для максимальной эффективности или для тягового усилия транспортного средства.
Для учета различных стратегических целей, преследуемых при рабочем использовании, устройство управления транспортного средства по изобретению посредством выбора оператором может приводиться в действие в различных рабочих режимах. После этого в зависимости от выбранного рабочего режима устройство управления регулирует давление в шинах в соответствии со стратегией регулирования, относящейся к этому рабочему режиму. При этом оператор освобождается от отслеживания и/или настройки давления в шинах, а давление в шинах автоматически регулируется в соответствии с заданной оператором целевой установкой. Одновременно преимущество решения состоит в том, что заполнение шин воздухом осуществляется независимо от опытности оператора и/или от его субъективной оценки ситуации.
В принципе возможны различные выбираемые оператором рабочие режимы для выполнения относящихся к ним стратегий регулирования. Выбор может удобно осуществляться через операторский интерфейс, например, такой как расположенный в кабине транспортного средства пользовательский интерфейс.
Согласно предпочтительному решению по развитию изобретения устройство управления выполнено с возможностью привода в действие в рабочем режиме, в котором устройство управления регулирует давление в шинах с целью достижения высокой эффективности транспортного средства. Эта стратегия регулирования служит для того, чтобы транспортное средство работало с энергетической эффективностью, в частности, с экономией топлива.
При этом предпочтительно транспортное средство оснащено средствами для восприятия коэффициента полезного действия (КПД) ходовой части и тягового коэффициента, причем устройство управления выполнено с возможностью привода в действие, чтобы в рамках процесса повышения эффективности с учетом предела несущей способности шин настраивать (устанавливать) давление в шинах, для которого создается максимальный КПД ходовой части в зависимости от тягового коэффициента. При этом действительны следующие определения:
КПД ходовой части соответствует отношению тяговой мощности колеса к механической входной мощности колеса. Альтернативно КПД ходовой части может быть вычислен по приведенным к ходовой оси величинам тяговой мощности ходовой оси и механической входной мощности на оси или по приведенным ко всему транспортному средству величинам общей тяговой мощности и механической входной мощности ходовой части.
Тяговый коэффициент соответствует отношению тягового усилия колеса к нагрузке на колесе. Альтернативно тяговый коэффициент может быть вычислен по приведенным к ходовой оси величинам тягового усилия ходовой оси и нагрузки на ходовой оси или по приведенным ко всему транспортному средству величинам тягового усилия транспортного средства и общего веса транспортного средства.
Для определения указанных величин транспортное средство оснащено соответствующей системой датчиков. Она включает в себя, например, датчики для восприятия давления в шинах, числа оборотов колес, крутящего момента колес, нагрузки на колесах, тягового усилия колес и скорости движения транспортного средства. Альтернативно или дополнительно, - при условии соответствующего пересчета, - вместо относящихся к колесам датчиков могут использоваться также датчики, относящиеся к ходовой оси или ко всему транспортному средству, то есть датчики для восприятия числа оборотов ходовой оси или выходного числа оборотов коробки передач, крутящего момента ходовой оси или выходного крутящего момента коробки передач, нагрузки на ходовой оси или общей нагрузки, тягового усилия ходовой оси или общего тягового усилия транспортного средства.
При этом предпочтительно устройство управления выполнено с возможностью привода в действие, чтобы в рамках процесса повышения эффективности вначале снижать давление в шинах, в частности, до предела несущей способности шин, а затем настраивать давление в шинах, для которого измеряется максимальный КПД ходовой части. Если еще до достижения предела несущей способности шин устройством управления распознается максимальный КПД ходовой части (в особенности на основе превышения максимальной величины), устройство управления может предпочтительно уже перед полным снижением давления в шинах до предела несущей способности шин установить давление в шинах, для которого достигается максимальный КПД ходовой части, чтобы произвести более быструю настройку. Давление в шинах, для которого достигается максимальный КПД ходовой части, совсем не обязательно должно быть минимально возможным давлением в шинах по условию несущей способности шин. Так например, в зависимости от состояния почвы может случаться, что при давлении в шинах больше минимального возможного давления по условию несущей способности шин достигается более высокий КПД ходовой части. При этом предпочтительно КПД ходовой части определяется непрерывно, причем устройство управления ориентируется на его образованную среднюю величину.
Далее, возможно, что устройство управления выполнено с возможностью привода в действие, чтобы посредством задания скорости движения обеспечивать эксплуатацию транспортного средства в точке эксплуатации (рабочей точке) с максимальным КПД ходовой части. Такой режим эксплуатации возможен, так как вследствие колебаний в процессе тяговых работ на поле (изменяющейся рабочей глубины навесных орудий, переменной прочности почвы) ход характеристики КПД ходовой части в зависимости от тягового коэффициента, известен, по меньшей мере, в пределах областей. Кроме того, при вводе навесного орудия в почву на краю поля характеристика проходит большую часть кривой «тяговый коэффициент - КПД ходовой части». Таким образом, устройство управления может смещать точку эксплуатации посредством изменения скорости движения, так что эта точка оказывается в области максимального КПД ходовой части. При этом снижение скорости движения приводит к уменьшению требуемого тягового усилия, а вместе с ним и тягового коэффициента, а повышение скорости движения приводит к увеличению тягового усилия и тягового коэффициента.
Такое задание скорости движения в целом может осуществляться в виде указания оператору и/или в виде непосредственного воздействия на регулятор хода транспортного средства.
Альтернативно задание скорости движения может приводить к рабочей точке, находящейся на задаваемом расстоянии от максимального КПД ходовой части, благодаря чему может достигаться компромисс между эффективностью и мощностью на единицу площади.
Поскольку условия сцепления с почвой непрерывно изменяются, целесообразно непрерывно определять КПД ходовой части с помощью системы датчиков, причем устройство управления ориентируется на образованную среднюю величину. После однократной настройки давления в шинах устройство управления на основе изменений положения усредненного КПД ходовой части в зависимости от тягового коэффициента решает, целесообразно ли дополнительное регулирование давления в шинах. При этом возможно, что буксование, соответствующее данному КПД ходовой части и тяговому коэффициенту, может являться указанием для новой настройки.
Для реализации стратегии регулирования эффективности можно оптимизировать тягу индивидуально для колес, индивидуально для ходовых осей или для всего транспортного средства. Кроме того, возможен вариант, в котором условия тяги передней ходовой оси оцениваются, по меньшей мере, частично из величин для задней ходовой оси.
Согласно предпочтительному решению по развитию изобретения устройство управления выполнено с возможностью привода в действие (работы) в рабочем режиме, в котором устройство управления регулирует давление в шинах с целью достижения высокой тяги транспортного средства. Такая стратегия регулирования служит, в частности, для того, чтобы транспортное средство работало с высокой мощностью на единицу площади.
При этом предпочтительно транспортное средство оснащено, по меньшей мере, одним средством для восприятия тягового коэффициента, причем устройство управления выполнено с возможностью привода в действие, чтобы в рамках процесса повышения тяги с учетом предела несущей способности шин настраивать давление в шинах, для которого достигается максимальное тяговое усилие для данной нагрузки на колесах.
Для определения тягового коэффициента транспортное средство оснащено соответствующей системой датчиков. Она включает в себя, например, датчики для восприятия давления в шинах, числа оборотов колес, крутящего момента колес, нагрузки на колесах, тягового усилия колес и скорости движения транспортного средства.
Предпочтительно устройство управления выполнено с возможностью привода в действие, чтобы в рамках процесса повышения тяги вначале снижать давление в шинах, в частности, до предела несущей способности шин, а затем настраивать давление в шинах, для которого измеряется максимальное тяговое усилие для данной нагрузки на колесах.
Если еще до достижения предела несущей способности шин устройством управления распознается максимальное тяговое усилие (в особенности на основе превышения максимальной величины), устройство управления может предпочтительно уже перед полным снижением давления в шинах до предела несущей способности шин установить давление в шинах, для которого достигается максимальный тяговый коэффициент, чтобы произвести более быструю настройку.
Для достижения высокой мощности на единицу площади предпочтительно устройство управления выполнено с возможностью привода в действие, чтобы при достигнутом повышении тяги повышать скорость движения транспортного средства. В частности, для полевых работ, при которых не должна превышаться рабочая скорость, может обеспечиваться возможность установления предела скорости. Если транспортное средство достигает этого предела скорости, выгодным образом может быть предусмотрено, что устройство управления автоматически переключается в описанный выше рабочий режим с целью достижения высокой эффективности транспортного средства, чтобы работать как можно эффективнее на уровне скорости, не подлежащем превышению.
Поскольку условия сцепления с почвой непрерывно изменяются, целесообразно непрерывно определять тяговый коэффициент с помощью системы датчиков, причем устройство управления ориентируется на образованную среднюю величину. После однократной настройки давления в шинах устройство управления на основе изменений положения усредненного КПД ходовой части в зависимости от тягового коэффициента решает, целесообразно ли дополнительное регулирование давления в шинах.
Для реализации стратегии регулирования тяги необходимо знание тягового коэффициента. Можно оптимизировать тягу индивидуально для колес, индивидуально для ходовых осей или для всего транспортного средства. Кроме того, возможен вариант, в котором условия тяги передней ходовой оси оцениваются, по меньшей мере, частично из величин для задней ходовой оси.
Согласно предпочтительному решению по развитию изобретения устройство управления выполнено с возможностью привода в действие в рабочем режиме, в котором устройство управления регулирует давление в шинах с целью обеспечения низкой нагрузки на почву, в частности, посредством того, что устройство управления устанавливает наименьшее допустимое давление в шинах по условиям нагрузки на колесах и скорости движения. Для реализации этой стратегии регулирования необходимо знание скорости движения, давления в шинах и нагрузки на колесах. Предпочтительно транспортное средство оснащено соответствующей системой датчиков.
Описанные выше стратегии регулирования относятся к автоматической настройке давления в шинах посредством устройства управления в соответствии с выбираемой стратегией регулирования. Кроме того, предпочтительно устройство управления выполнено с возможностью перевода в ручной рабочий режим, в котором может свободно настраиваться желаемое оператором давление в шинах, например, в качестве числовой величины (давления в шинах), то есть независимо от описанных стратегий регулирования. Для этого предпочтительно могут быть предусмотрены одна или несколько клавиш быстрого выбора, по которым оператор может быстро и просто вызывать записанные величины давления в шинах. Так, например, при этом может быть предусмотрен общий быстрый выбор для дорожного движения и общий быстрый выбор для полевого движения.
Согласно следующему предпочтительному решению по развитию изобретения устройство управления выполнено с возможностью привода в действие, чтобы отслеживать превышение предела несущей способности шин. В этой связи предел несущей способности шин является приоритетным пределом регулирования для обеспечения того, чтобы не превышалась несущая способность шин, например, указанная производителем для определенных скоростей движения и нагрузок на колесах. В принципе отслеживание предела регулирования может осуществляться в любое время независимо от выбранного рабочего режима регулирования давления в шинах и/или независимо от ручного рабочего режима. При этом возможен вариант, в котором при превышении предела несущей способности шин устройство управления выдает оператору оптическое и/или акустическое указание и/или устройство управления в принципе препятствует превышению предела несущей способности шин. Дополнительно может быть предусмотрено, что устройство управления допускает кратковременное превышение, потому что это некритично для шины. Кроме того может быть предусмотрено допустимое превышение предела несущей способности шин, например, в случае подключаемой функции крайней необходимости, например, для освобождения увязшего транспортного средства.
Для отслеживания превышения предела несущей способности шин транспортное средство оснащено соответствующей системой датчиков. Она включает в себя, например, датчики для восприятия скорости движения, нагрузки на колесах и давления в шинах транспортного средства.
Описанное транспортное средство обеспечивает для оператора поддержку при выборе подходящего давления в шинах путем электронной оптимизации контакта шин с основанием. При этом обеспечивается, с одной стороны, недопущение превышения предела несущей способности шин и, с другой стороны, настройка для данных условий оптимального давления в шинах в соответствии с выбираемой оператором стратегией регулирования. При этом возможные стратегии регулирования имеют целью эффективность, мощность на единицу площади, бережное движение по почве. Направленная на эффективность стратегия регулирования может способствовать экономии топлива, причем при тяговых работах на поле настраивается не обязательно минимальное давление в шинах, а то давление в шинах, при котором достигается наивысший КПД ходовой части.
Краткий перечень чертежей
Далее изобретение будет описано на примере выполнения. Из описания будут ясны возможности осуществления и преимущества изобретения. На чертежах:
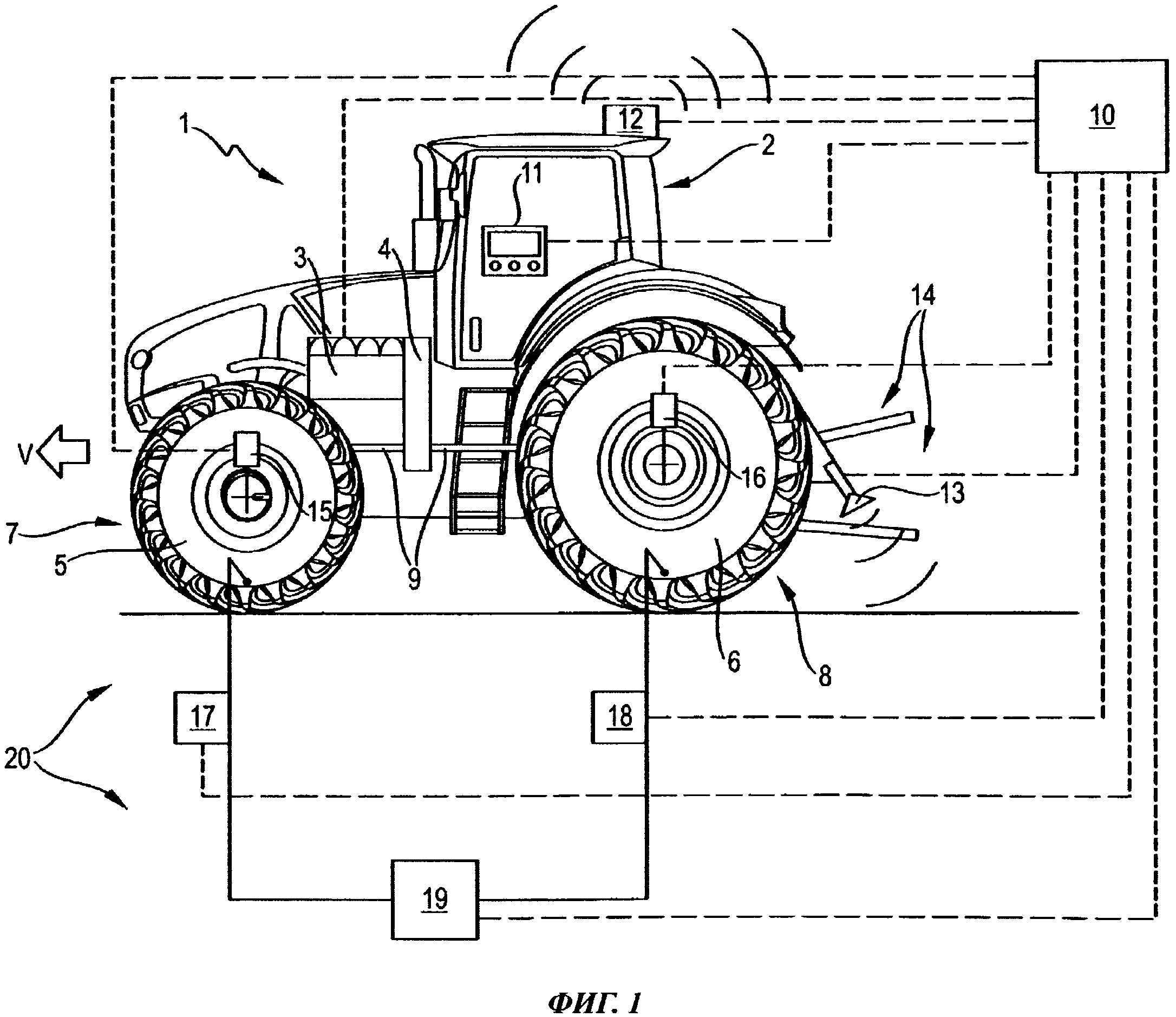
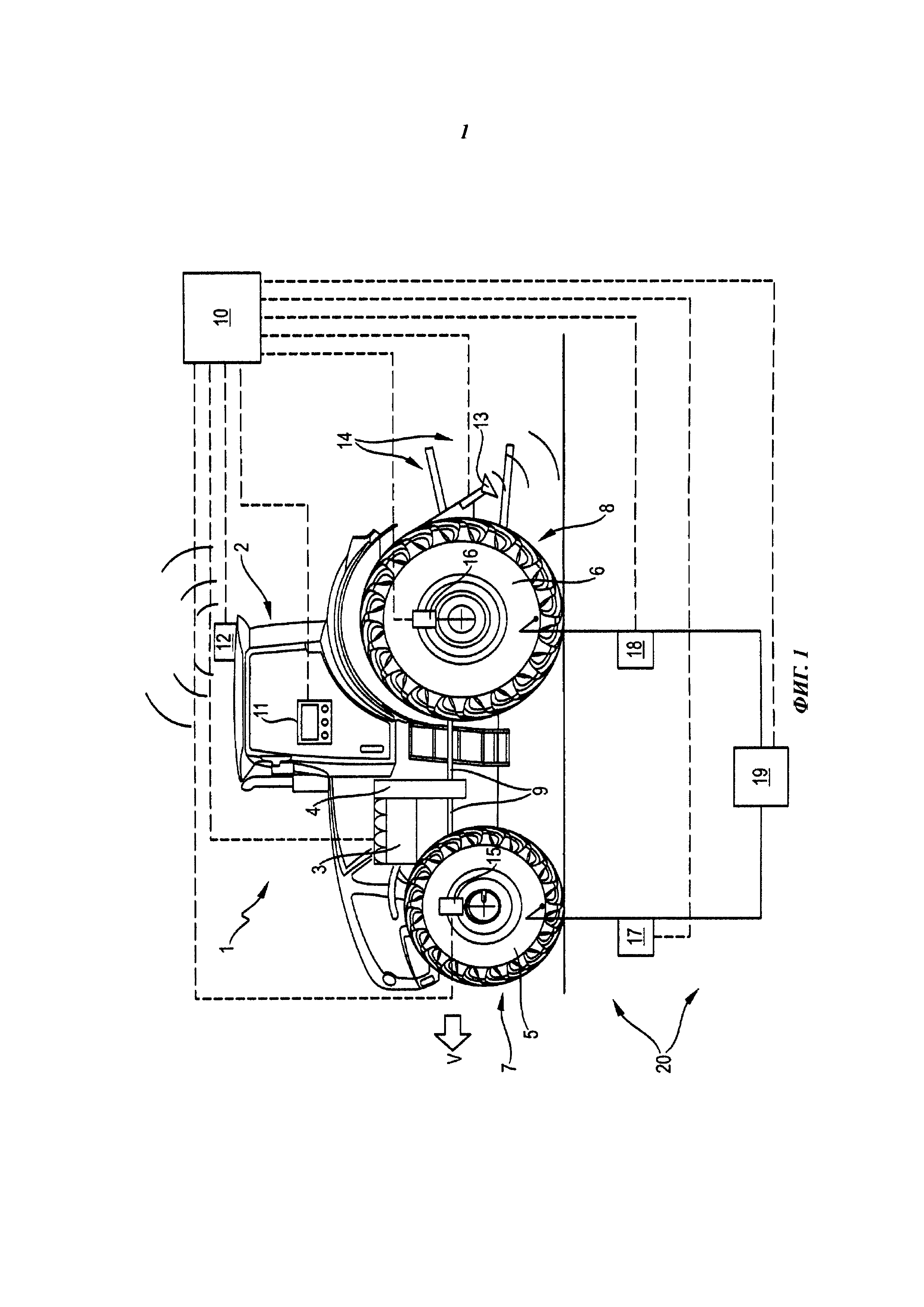
фиг. 1 схематично изображает трактор на виде сбоку,
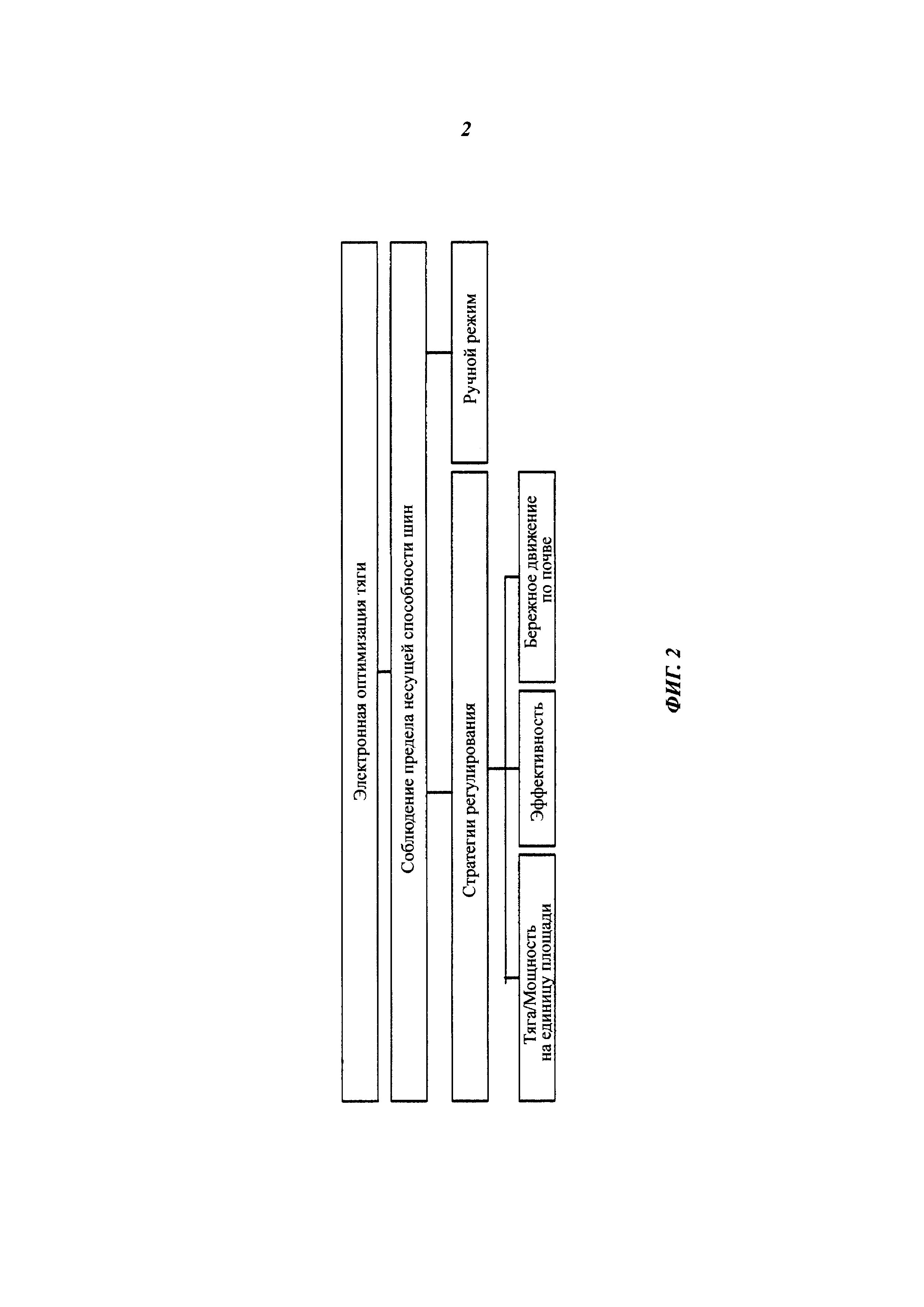
фиг. 2 иллюстрирует пример электронной оптимизации тяги,
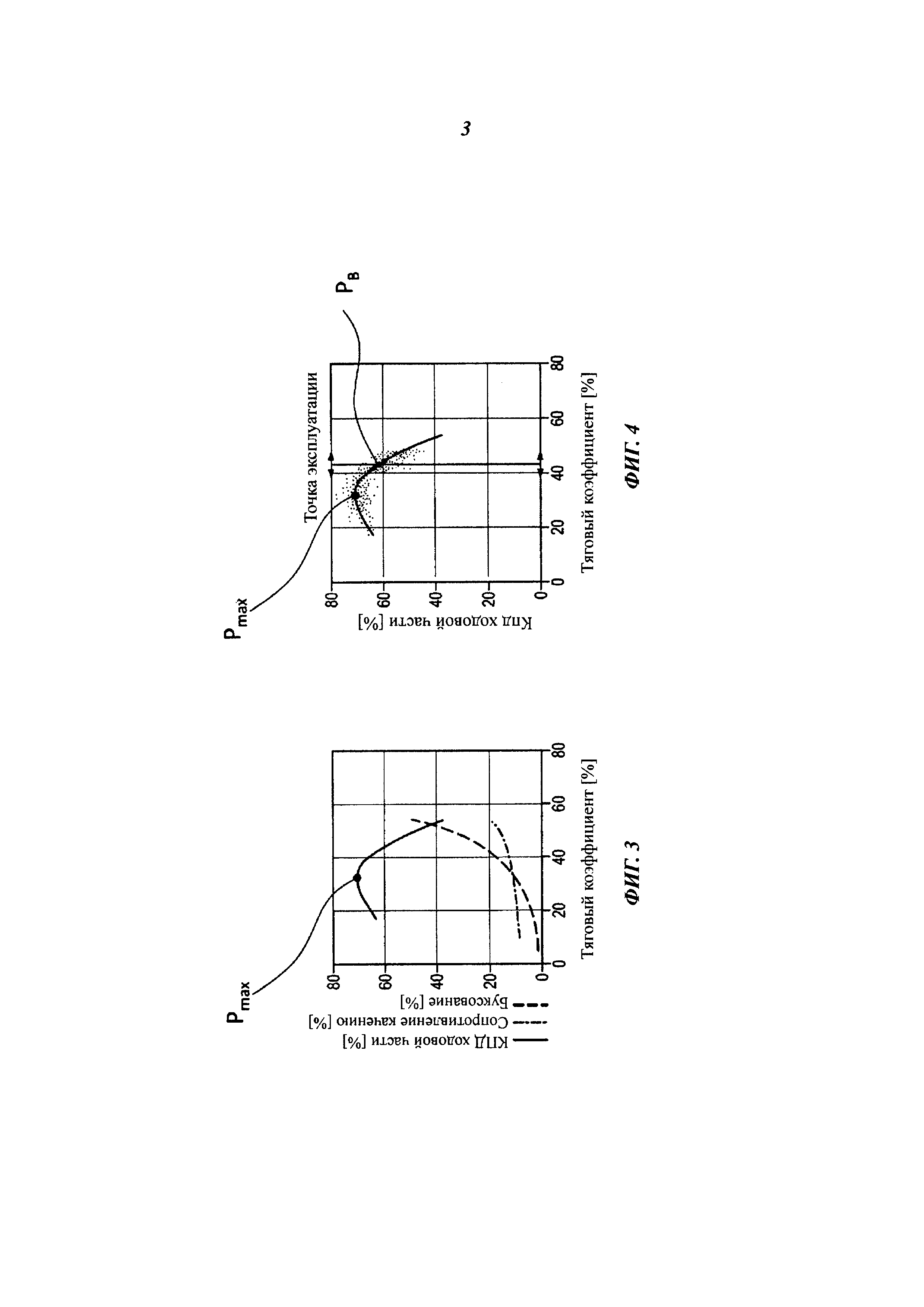
фиг. 3 изображает диаграмму КПД ходовой части, сопротивления качению и буксования в зависимости от тягового коэффициента,
фиг. 4 изображает пример ситуации оптимизации.
Осуществление изобретения
На фиг. 1 схематично показано на виде сбоку сельскохозяйственное транспортное средство в виде трактора 1. Трактор 1 движется со скоростью v движения в показанном стрелкой v направлении по основанию (например, по почве на поле, по дороге). Для этого трактор 1 оснащен приводной трансмиссией, которая содержит, в частности, приводной двигатель 3, коробку 4 передач, валы 9, два передних колеса 7 и два задних колеса 8. Компоненты трансмиссии взаимодействуют друг с другом известным образом, так что подаваемая приводным двигателем 3 приводная мощность может передаваться на передние колеса 7 и задние колеса 8 (за вычетом потерь мощности), чтобы перемещать трактор 1 по основанию. Подобным же образом на месте трактора может быть другое сельскохозяйственное транспортное средство.
Передние колеса 7 и задние колеса 8 трактора 1 снабжены передними шинами 5 и задними шинами 6. Передние шины 5 и задние шины 6 связаны линиями давления (включая не показанные здесь вращающиеся соединительные устройства) с пневматическим устройством 19, которое содержит все пневматические компоненты, необходимые для заполнения шин 5, 6 воздухом под давлением (компрессор, электромагнитные клапаны и/или переключатели и т.д.). При этом шины 5, 6 с соединительными линиями давления и пневматическим устройством 19 образуют систему 20 создания давления в шинах. Система 20 создания давления в шинах позволяет заполнять шины 5, 6 трактора 1, а также выпускать из них воздух в процессе движения. Системы создания давления в шинах с такими функциями известны специалисту из уровня техники в различных исполнениях и не требуют здесь дальнейших пояснений.
Далее, трактор 1 оснащен электронным устройством 10 управления. Электронное устройство 10 управления связано с расположенным в кабине 2 водителя трактора 1 блоком 11 управления и отображения. Таким образом, для водителя трактора 1 посредством блока 11 управления и отображения могут вызываться и отображаться различные данные от устройства 10 управления. Одновременно через блок 11 управления и отображения оператор может производить настройку, которая вводится в устройство 10 управления в виде входных сигналов. Дальше будет пояснено, какие при этом существуют возможности.
Далее, устройство 10 управления связано с системой различных датчиков. Датчики 17 и 18 давления передают на устройство 10 управления давление в передних и задних шинах 5, 6. Кроме того, для заднего колеса 8 предназначена система 16 датчиков, связанная с устройством 10 управления. Система 16 датчиков позволяет воспринимать различные относящиеся к заднему колесу 8 рабочие параметры, такие как число оборотов, крутящий момент нагрузка на колесо и тяговое усилие колеса. Для конструктивного выполнения требуемых для этого отдельных датчиков (позициями не обозначены) существуют различные возможности, известные сами по себе. При этом, -при условии соответствующего перерасчета, - вместо восприятия числа оборотов колеса может восприниматься число оборотов ходовой оси и/или выходное число оборотов коробки передач, если это представляется более удобным в конструктивном отношении. Аналогично при соответствующем перерасчете вместо крутящего момента колеса датчиками может восприниматься крутящий момент ходовой оси и/или выходной крутящий момент коробки передач. Вместо нагрузки на колесо может восприниматься нагрузка на ходовую ось и/или общая нагрузка на трактор 1. Вместо тягового усилия колеса может восприниматься тяговое усилие на ходовой оси и/или общее тяговое усилие трактора 1. Необходимые для этого технологии систем датчиков рассматриваются здесь как известные и подробно не поясняются.
Далее, для переднего колеса 7 предназначена система 15 датчиков, связанная с устройством 10 управления. Система 15 датчиков выполняет те же функции, что и система 16 датчиков, то есть служит для восприятия числа оборотов, крутящего момента, нагрузки и тягового усилия на переднем колесе 7. Как и система 16 датчиков, система 15 датчиков может быть конструктивно выполнена различным образом. К ней равным образом относится указанное выше в отношении системы 16 датчиков.
Далее, устройство 10 управления связано сдатчиками для восприятия скорости v движения трактора 1. Для этого в показанном примере осуществления трактор 1 оснащен двумя системами восприятия скорости движения. На заднем подъемном механизме 14 трактора 1 расположен радарный датчик 13, который посредством взаимодействия с почвой определяет скорость v движения трактора 1 и передает ее на устройство 10 управления. Дополнительно на кабине 2 водителя расположено навигационное устройство 12, которое на основе использования спутниковой системы определения положения (например, GPS) определяет скорость v движения трактора 1 и передает ее на устройство 10 управления. Может быть достаточным использование только одной из описанных возможностей определения скорости движения.
Давление в передних и задних шинах 5, 6 трактора 1 может регулироваться следующим образом. Оператор трактора 1 через блок 11 управления и отображения устанавливает диалоговую связь с устройством 10 управления. При этом, используя возможности выбора, оператор может приводить в действие устройство 10 управления в различных рабочих режимах. Следствием выбора рабочего режима является то, что устройство 10 управления регулирует давление в шинах с учетом стратегии регулирования, относящейся к этому рабочему режиму. Для этого следует обратиться к фиг. 2, на которой показана предпочтительная структура выбора. В соответствии с ней оператор имеет возможность выбора между тремя различными стратегиями регулирования (эффективность, тяга, бережное движение по почве), что соответствует работе устройства 10 управления в трех различных рабочих режимах. При выборе одной из трех стратегий регулирования устройство 10 управления автоматически регулирует давление в шинах трактора 1 с учетом целевой установки и для этого с дальнейшим учетом имеющихся в распоряжении сигналов датчиков определяет подходящее давление в шинах 5, 6 и настраивает его посредством управления пневматическим устройством 19. Таким образом, после выбора стратегии регулирования оператор освобождается от дальнейшего наблюдения за давлением в шинах и его настройки.
Помимо этого оператор имеет возможность переключать устройство 10 управления в ручной режим. В ручном режиме эксплуатации оператор может свободно задавать давление в шинах. В этом случае устройство 10 управления путем управления пневматическим устройством 19 обеспечивает настройку желаемого давления в шинах 5, 6.
Далее, на фиг. 2 показано наличие приоритетного соблюдения предела регулирования. Оно состоит в том, что как в автоматическом режиме регулирования, то есть при активизации одной из трех стратегий регулирования, так и в ручном режиме устройство 10 управления выполняет отслеживание, которое включает в себя непрерывный контроль за соблюдением предела несущей способности шин, то есть минимального допустимого давления в шинах, которое допустимо для определенной нагрузки на колесах и скорости движения транспортного средства. Предпочтительно это осуществляется путем того, что при активизации одной из трех стратегий регулирования полностью предотвращается превышение предела несущей способности шин, посредством того, что устройство 10 управления при необходимости автоматически поднимает давление в шинах на достаточный уровень. При ручном рабочем режиме отслеживание осуществляется путем того, что при превышении предела несущей способности шин оператору дается оптическое или акустическое предупреждение об этом на блоке 11 управления и отображения.
Если выбрана стратегия регулирования «Эффективность», устройство 10 управления регулирует давление в шинах с той целью, чтобы тяговые работы трактора 1 (в частности, на поле) выполнялись с максимальной эффективностью, в частности, по возможности с минимальным расходом топлива. При этом решающую роль играет так называемый КПД ходовой части (отношение тяговой мощности трактора 1 к механической входной мощности ходовой части), при этом компоненты тяговой мощности и входной мощности ходовой части определяются датчиками. Следующий за этим процесс оптимизации содержит, по меньшей мере, один первый шаг и в качестве опции также второй шаг.
На первом шаге для данных условий определяется оптимальное давление в шинах (например, индивидуально для колес или индивидуально для ходовых осей). Для этого вначале путем настройки с помощью устройства 10 управления давление в шинах снижается до предела несущей способности шин (в зависимости от скорости v и нагрузки на колесах, воспринимаемых датчиками 12, 13 или 15, 16). Затем настраивается давление в шинах, для которого был измерен максимальный КПД ходовой части. Оно отнюдь не обязательно должно соответствовать минимальному давлению в шинах по критерию несущей способности шин.
В этом отношении следует обратиться к фиг. 3, на которой в графическом виде количественно представлены эксплуатационные характеристики шин трактора. На диаграмме представлены кривые КПД ходовой части (сплошная линия), сопротивления качению (штрихпунктирная линия) и буксования (штриховая линия) в зависимости от тягового коэффициента. На диаграмме технически наиболее интересующие взаимосвязи тяговой силы и эффективности охарактеризованы единственной кривой (кривой КПД ходовой части). При этом тяговый коэффициент является, - при наличии соответствующих датчиков, - непосредственно измеряемой величиной, поскольку он определяется из отношения тяговой мощности к нагрузке на колесах. Таким образом, тяговый коэффициент может определяться системами 15 или 16 датчиков. Кпд ходовой части также является, - при наличии соответствующих датчиков, -непосредственно измеряемой величиной, поскольку он определяется из отношения тяговой мощности транспортного средства к механической входной мощности ходовой части. Как можно видеть на фиг. 3, кривая КПД ходовой части имеет максимум Рmax на графике зависимости от тягового коэффициента. Согласно диаграмме КПД ходовой части вначале повышается с увеличением тягового коэффициента до достижения этого максимума Рmax (здесь при тяговом коэффициенте примерно от 30% до 40%), однако при дальнейшем увеличении тягового коэффициента вновь резко снижается.
Поскольку на практике условия сцепления с почвой (то есть при движении трактора 1 по полю) непрерывно изменяются, предпочтительно КПД ходовой части определяется непрерывно, и устройство 10 управления ориентируется на среднюю величину. Для этого следует обратиться к фиг. 4, на которой на диаграмме (КПД ходовой части в зависимости от тягового коэффициента) показано построение средней величины кривой КПД ходовой части из отдельных точек измерения. После однократной настройки давления в шинах устройство 10 управления на основе изменений положения усредненного КПД ходовой части в зависимости от тягового коэффициента решает, целесообразно ли дополнительное регулирование давления в шинах. При этом возможно, что буксование, соответствующее данному КПД ходовой части и тяговому коэффициенту, может являться указанием для новой настройки.
На опциональном втором шаге, если это допустимо, устройство 10 управления посредством управления регулятором скорости движения (обозначено сигнальной линией от устройства 10 управления к приводному двигателю 3 или коробке 4 передач) может изменять скорость v движения трактора 1, чтобы смещать точку Рв эксплуатации (см. фиг. 4) в область максимального КПД ходовой части. Эта «целевая точка эксплуатации» (с максимальным КПД ходовой части) также обозначена на фиг. 4 как точка Рmax. Ход кривой КПД ходовой части в зависимости от тягового коэффициента известен для определенных областей, так как при тяговых работах на поле тяговый коэффициент колеблется, например, вследствие колебаний рабочей глубины навесного орудия и твердости почвы, и, соответственно, точка Рв эксплуатации перемещается в пределах характеристики в одну и другую сторону. Кроме того, при вводе навесного орудия в почву на краю поля проходится большая часть кривой «тяговый коэффициент - КПД ходовой части». Таким образом, устройство 10 управления, зная ход кривой усредненного КПД ходовой части, в зависимости от тягового коэффициента, может смещать точку Рв эксплуатации посредством изменения скорости v движения, так что эта точка оказывается в области точки Рmax максимального КПД ходовой части. При этом снижение скорости v движения приводит к уменьшению требуемого тягового усилия, а вместе с ним и тягового коэффициента, а повышение скорости v движения приводит к увеличению тягового усилия и тягового коэффициента. Устройство 10 управления может давать указание оператору о снижении или повышении скорости v движения при одновременной визуализации КПД ходовой части (на блоке 11 отображения) или автоматически регулировать скорость путем непосредственного воздействия на регулятор хода.
Кроме того, возможен вариант, когда устройство 10 управления устанавливает точку эксплуатации на определенном оператором расстоянии от максимума КПД ходовой части, которое дает хороший компромисс между КПД передачи усилия и мощностью на единицу площади.
Для реализации стратегии регулирования «Эффективность» устройство 10 управления определяет КПД ходовой части и тяговый коэффициент. Оптимизация тяги может осуществляться индивидуально для колес, индивидуально для ходовых осей или для всего транспортного средства. Кроме того, возможен вариант, в котором устройство 10 управления оценивает условия тяги передней ходовой оси, по меньшей мере, частично из величин для задней ходовой оси.
Если выбирается стратегия регулирования «Тяга», устройство 10 управления регулирует давление в шинах с той целью, чтобы при тяговых работах на поле достигалась максимальная мощность на единицу площади. Для этого устройство 10 управления оптимизирует тяговое усилие для имеющихся условий. В этом отношении решающую роль играет, в частности, тяговый коэффициент, пояснение которого было приведено выше.
При этом устройство 10 управления определяет оптимальное для данных условий давление в шинах (например, индивидуально для колес или индивидуально для ходовых осей). Для этого вначале путем настройки с помощью устройства 10 управления давление в шинах снижается до предела несущей способности шин (в зависимости от скорости v движения и нагрузки на колесах, воспринимаемых датчиками 12, 13 или 15, 16). Затем настраивается давление в шинах, для которого получается максимальное отношение тягового усилия к нагрузке на колесах, то есть максимальный тяговый коэффициент. Достигнутый при этом выигрыш в тяге может использоваться, чтобы повысить скорость v движения. Для полевых работ, при которых не должна превышаться определенная скорость движения, оператор имеет возможность установить предел скорости. Когда трактор 1 достигает ее, доводится до максимума КПД ходовой части в соответствии со стратегией регулирования «Эффективность».
Поскольку на практике условия сцепления с почвой (то есть при движении трактора 1 по полю) непрерывно изменяются, предпочтительно КПД ходовой части определяется непрерывно, и устройство 10 управления ориентируется на среднюю величину. После однократной настройки давления в шинах устройство 10 управления на основе изменений положения усредненного КПД ходовой части в зависимости от тягового коэффициента решает, целесообразно ли дополнительное регулирование давления в шинах. При этом возможно, что буксование, соответствующее данному КПД ходовой части и тяговому коэффициенту, может являться указанием для новой настройки.
Для реализации стратегии регулирования «Тяга» устройство 10 управления определяет КПД ходовой части и тяговый коэффициент. Оптимизация тяги может осуществляться в отношении колес, индивидуально для ходовых осе или для всего транспортного средства. Кроме того, возможен вариант, в котором устройство 10 управления оценивает условия тяги передней ходовой оси, по меньшей мере, частично из величин для задней ходовой оси.
Если выбирается стратегия регулирования «Бережное движение по почве», устройство 10 управления регулирует давление в шинах с той целью, чтобы работа на поле проводилась с минимальной нагрузкой на почву, в частности, с минимальным уплотнением почвы. Для этого устройство 10 управления управляет пневматическим устройством 19 таким образом, чтобы, - в соответствии с приоритетным пределом регулирования, - было установлено минимальное давление в шинах, допустимое для данной нагрузки на колесах и скорости v движения.
Для реализации стратегии регулирования «Бережное движение по почве» устройство 10 управления учитывает скорость движения и нагрузку на колесах. Оптимизация может осуществляться индивидуально для колес, индивидуально для ходовых осей или для всего транспортного средства. Кроме того, возможен вариант, в котором устройство 10 управления оценивает условия передней ходовой оси, по меньшей мере, частично на основании величин для задней ходовой оси.
Перечень условных обозначений
1 Трактор
2 Кабина водителя
3 Приводной двигатель
4 Коробка передач
5 Передняя шина
6 Задняя шина
7 Переднее колесо
8 Заднее колесо
9 Валы
10 Электронное устройство управления
11 Блок управления и отображения
12 Навигационное устройство
13 Радарный датчик
14 Задний подъемный механизм
15 Система датчиков
16 Система датчиков
17 Датчик давления
18 Датчик давления
18 Пневматическое устройство
20 Система создания давления в шинах
v Скорость движения
Рв Точка эксплуатации (рабочая точка)
Рmax Рабочая точка максимальной эффективности
Сельскохозяйственная рабочая машина
Сельскохозяйственная рабочая машина и способ опережающего регулирования приводной мощности и/или приводной трансмиссии
Сельскохозяйственная рабочая машина и способ эксплуатации сельскохозяйственной рабочей машины
Сельскохозяйственная машина
Сельскохозяйственная машина

