Система посадки беспилотного летательного аппарата вертикального взлета и посадки
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к авиационной технике, в частности к системам посадки беспилотных летательных аппаратов вертикального взлета и посадки. Система может быть применена везде, где есть необходимость применения летательных аппаратов для аэрофотосъемки и мониторинга или других задач, но нет возможности гарантировано и безопасно для окружающих посадить аппарат в автоматическом режиме обычным способом: корабли, катера, морские платформы, подводные лодки в надводном положении, горная и болотистая местность, зоны затопления, городские кварталы и т.п. Кроме того, данное техническое решение может быть использовано для подзарядки/дозаправки аппарата в автономных системах мониторинга. Такой вариант посадки интересен тем, что позволяет расширить область применения, в частности, для построения систем автоматического мониторинга и аэрофотосъемки различных территорий и объектов, например нефтепроводов, для выявления утечек, незаконных подключений и т.п., мониторинг государственной границы, особо охраняемых объектов. Эта система обеспечит гарантированную посадку летательных аппаратов, а также возможность их автоматического обслуживания, подзарядки или дозаправки.
Уровень техники
Из уровня техники известен способ парашютной посадки беспилотного летательного аппарата и беспилотный летательный аппарат с электродвижителем и парашютной системой посадки (RU 2592963, C2, B64D17/80, B64C39/02, опубл.10.04.2016). Способ посадки беспилотного летательного аппарата (БЛА) включает применение парашютной системы, отделение контейнера с аккумуляторными батареями, разворачивание посадочного фала с якорным устройством и якорение фала. При этом осуществляют перевод БЛА в режим плавного снижения привязного аэродинамического носителя натяжением фала. Якорение фала производят гирляндно, прикрепленными аккумуляторными контейнерами с элементами зацепления. БЛА с электродвижителем содержит сбрасываемый контейнер с аккумуляторными батареями и парашютную систему, которая установлена посредством подвесной системы. БЛА снабжен устройством ориентации продольной и поперечной осей и посадочным фалом. На контейнере установлены якорное устройство, устройства сматывания фала и поддерживания его натяжения. Посадочный фал посредством устройства поддерживания его натяжения и устройства ориентации осей БЛА соединен с контейнером. Группа изобретений направлена на предотвращение повреждения БЛА при посадке.
Наиболее близким аналогом заявленного технического решения является система запуска и посадки самолетов, способных парить при полете, имеет особое применение к судам. Система включает козловые средства, имеющие базовую часть для прикрепления к наземной станции и дистальной части, (ii) растягивающийся в продольном направлении элемент, шарнирно установленный на указанной дистальной части, (iii ) первое средство срабатывания, действующее для осуществления расширения и сжатия указанного растяжимого элемента, (iv) второе приводное средство, предназначенное для осуществления поворотного перемещения упомянутого растяжимого элемента относительно упомянутой дистальной части, (v) первое дополнительное средство зацепления, предусмотренное на концевой области, указанный гибкий элемент удален от дистальной части, (vi) летательный аппарат, способный зависать, по существу, в неподвижном горизонтальном положении относительно упомянутых козловых средств, (vii) второе дополнительное средство зацепления, предусмотренное на воздушном судне в области его центра тяжести, смежного нормальную ось летательного аппарата и приспособленную для разъемного зацепления с упомянутым первым дополнительным средством зацепления, (viii) средства управления для восприятия положения второго дополнительного средства зацепления, когда воздушное судно нависает в заданной области захвата, и для работы упомянутого первого и второго приводных средств для направления упомянутого первого дополнительного средства зацепления в зацепление с упомянутым вторым дополнительным средством зацепления, посредством чего для извлечения воздушное судно, указанное первое дополнительное средство зацепления может быть введено в разъемное дополнительное воздушное зацепление с упомянутым вторым средством зацепления, независимо от местоположения воздушного судна в пределах области захвата, для поддержки основной части веса летательного аппарата, а система таким образом, что перевозимый самолет, когда он освобождается посредством разъединения средства зацепления, может принимать положение, поддерживаемое в полете (US 4523729, B64F 1/04, 18.06.1985).
Сущность изобретения
Задачей, решаемой заявленным техническим решением, является фиксация аппаратного модуля “якоря” в наземной части системы посадки и зависании в воздухе, с целью дальнейшей зарядки аппарата через “якорь”. С помощью системы достигается большая точность конечного положения аппарата после посадки.
Техническим результатом заявленного технического решения является фиксация аппаратного модуля в модуле посадки системы посадки и зависании в воздухе, с целью дальнейшей зарядки аппарата через “якорь”. С помощью системы достигается большая точность конечного положения аппарата после посадки.
Технический результат заявленного изобретения достигается за счет того, что система посадки беспилотного летательного аппарата вертикального взлета и посадки, состоящая из воздушного модуля, закрепляемого на летательном аппарате, и модуля посадки, при этом воздушный модуль содержит корпус, с размещенным в корпусе блоком электронного управления, шарообразный якорь, размещенный на жесткой стойке, при этом на нижней части якоря выполнены электрические контакты, а модуль посадки выполнен в виде устройства захвата, при этом устройство захвата состоит из купола с установленными в нижней части купола створками, выполненными с возможностью открытия внутрь купола, причем в каждой створке выполнен паз, таким образом, что в закрытом положении створок, данные пазы образуют отверстие, в которое плотно помещается стойка якоря воздушного модуля системы посадки, при этом створки выполнены с подпружиненными контактами.
В частном случае реализации заявленного технического решения блок электронного управления содержит инерциальную систему управления, включающую гироскопы, акселерометры и микрокомпьютер.
В частном случае реализации заявленного технического решения система посадки выполнена с возможностью подлета беспилотного летательного аппарата к модулю посадки снизу вверх, при этом воздушный модуль закреплен в верхней части корпуса беспилотного летательного аппарата.
В частном случае реализации заявленного технического решения система посадки выполнена с возможностью подлета беспилотного летательного аппарата к модулю посадки сбоку, при этом воздушный модуль закреплен на боковой поверхности корпуса беспилотного летательного аппарата.
В частном случае реализации заявленного технического решения система посадки содержит систему наведения, выполненную с возможностью наведения беспилотного летательного аппарата в устройство захвата модуля посадки, состоящую из трех подсистем: приёмника глобальных навигационных спутниковых систем, расположенного в верхней части летательного аппарата и выполненного с возможностью подвода беспилотного летательного аппарата в круг действия ультразвуковых датчиков на высоте; по меньшей мере четырех ультразвуковых датчиков навигации выполненных с возможностью наведения беспилотного летательного аппарата под устройство захвата системы в круг действия системы технического зрения, один из которых расположен на корпусе летательного аппарата со стороны расположения воздушного модуля системы посадки, и по меньшей мере три упомянутых датчика расположены на модуле посадки с образованием локальной системы координат, при этом один из трех упомянутых датчиков расположен на модуле посадки со стороны подлета беспилотного летательного аппарата; системы технического зрения, состоящей из видеокамеры и микрокомпьютера для обработки изображений, при этом видеокамера системы технического зрения установлена на якоре и направлена в сторону устройства захвата или установлена на устройстве захвата и направлена в сторону якоря воздушного модуля системы посадки;
при этом на модуле посадки системы выполнены метки для системы наведения, в частности, метки выполнены в виде отдельных разноцветных ламп или светодиодных лент, расположенных вокруг створок и/или по кромке купола со стороны подлета беспилотного летательного аппарата, причем каждая подсистема системы наведения системы посадки беспилотных летательных аппаратов вертикального взлета и посадки выполнена с большой точностью, чем предыдущая и выполнена с возможностью отключения с момента начала действия следующей подсистемы, и в случае если следующая подсистема не может выполнить наведение и переход к следующему этапу, навигация осуществляется посредством предыдущей подсистемы системы наведения, при этом вылете беспилотного летательного аппарата из системы посадки беспилотных летательных аппаратов вертикального взлета и посадки система навигации работает последовательно в обратном порядке.
В частном случае реализации заявленного технического решения видеокамера выполнена с возможностью передачи изображения оператору в реальном времени, что даёт возможность контроля или управления аппаратом для посадки в ручном режиме.
В частном случае реализации заявленного технического решения системы посадки светодиодные ленты выполнены в инфракрасном диапазоне.
В частном случае реализации заявленного технического решения системы посадки модуль посадки дополнительно содержит источники освещения, в частности фонари, подсвечивающие метки системы наведения.
В частном случае реализации заявленного технического решения системы посадки по окружности купола дополнительно выполнены выступы для упора створок в закрытом положении.
В частном случае реализации заявленного технического решения системы посадки модуль посадки расположен на стационарном или подвижном объекте.
В частном случае реализации заявленного технического решения системы посадки модуль посадки дополнительно снабжен крышей, на поверхности которой расположены элементы солнечных батарей.
В частном случае реализации заявленного технического решения системы посадки модуль посадки дополнительно снабжен устройством стабилизации, состоящим из электронной платы стабилизации с микрокомпьютером, гироскопами, акселерометрами и магнитометром и трех осей, на которой установлено один или два мотора, получающие команды от платы стабилизации.
В частном случае реализации заявленного технического решения системы посадки модуль посадки выполнен в боксе, с возможностью выдвижения основания наземного модуля.
В частном случае реализации заявленного технического решения системы посадки основание модуля посадки дополнительно содержит устройство позиционирования.
В частном случае реализации заявленного технического решения системы посадки компоненты электронной части управления системой встроены в корпус летательного аппарата, при этом питание системы реализовано от бортовой системы питания летательного аппарата.
В частном случае реализации заявленного технического решения системы посадки стойка якоря и устройство захвата расположены под углом навстречу друг другу.
В частном случае реализации заявленного технического решения системы посадки якорь выполнен с возможностью независимого вращения относительно оси.
В частном случае реализации заявленного технического решения система посадки стойка якоря выполнена с возможностью регулировки длины и угла наклона.
Краткое описание чертежей
Детали, признаки, а также преимущества настоящего изобретения следуют из нижеследующего описания вариантов реализации заявленного технического решения с использованием чертежей, на которых показано:
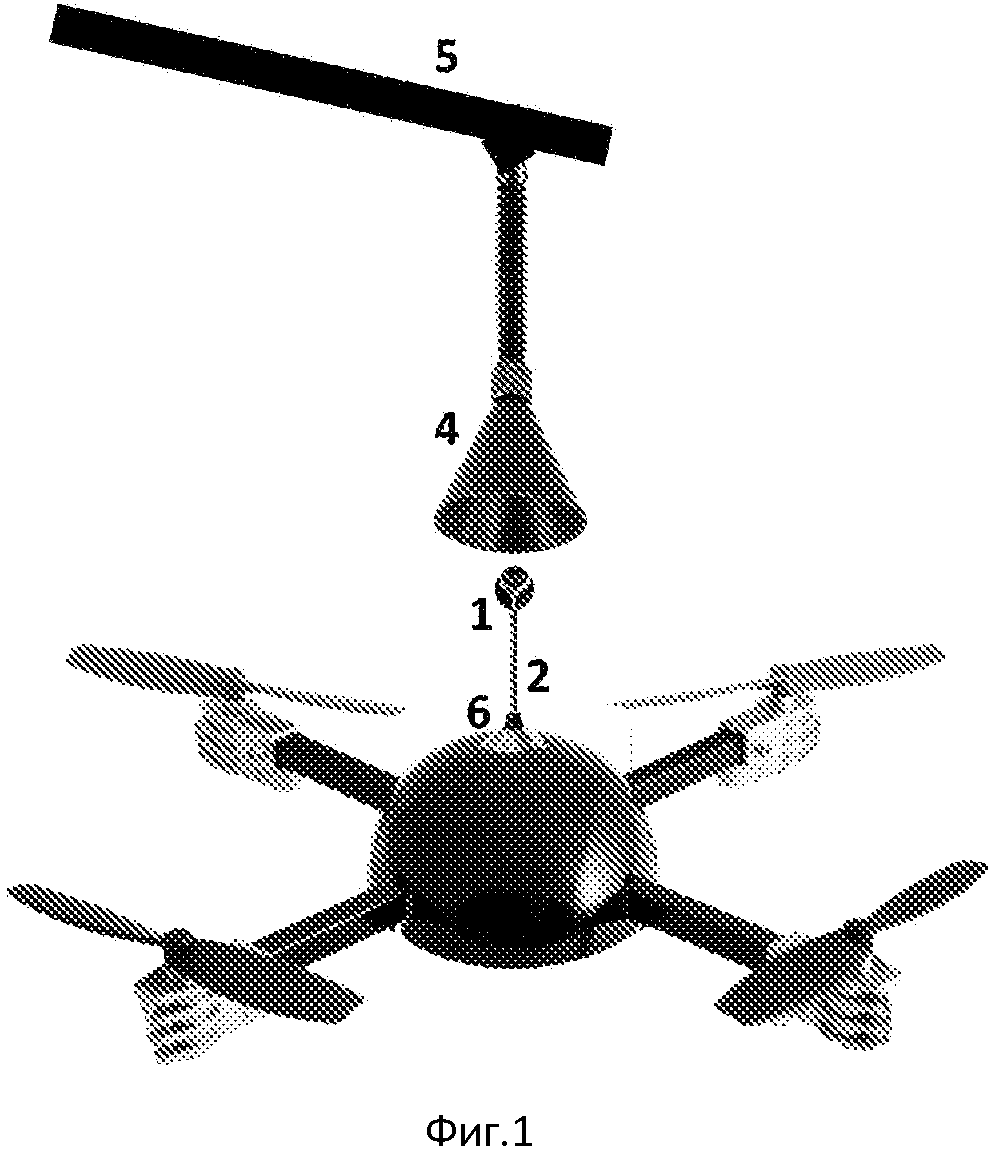
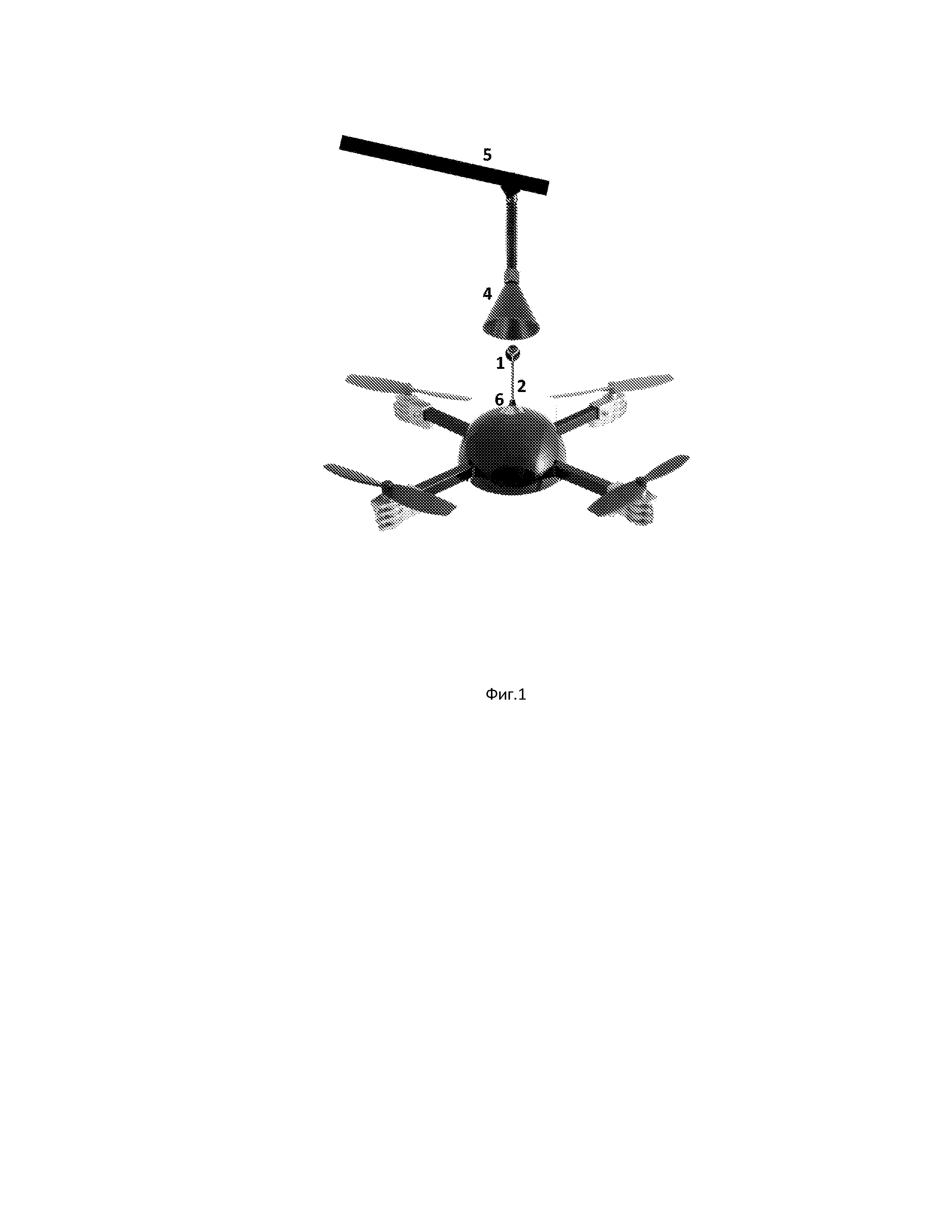
Фиг.1 – мультикоптер с установленным на него “якорем” системы посадки и наземной частью системы посадки;
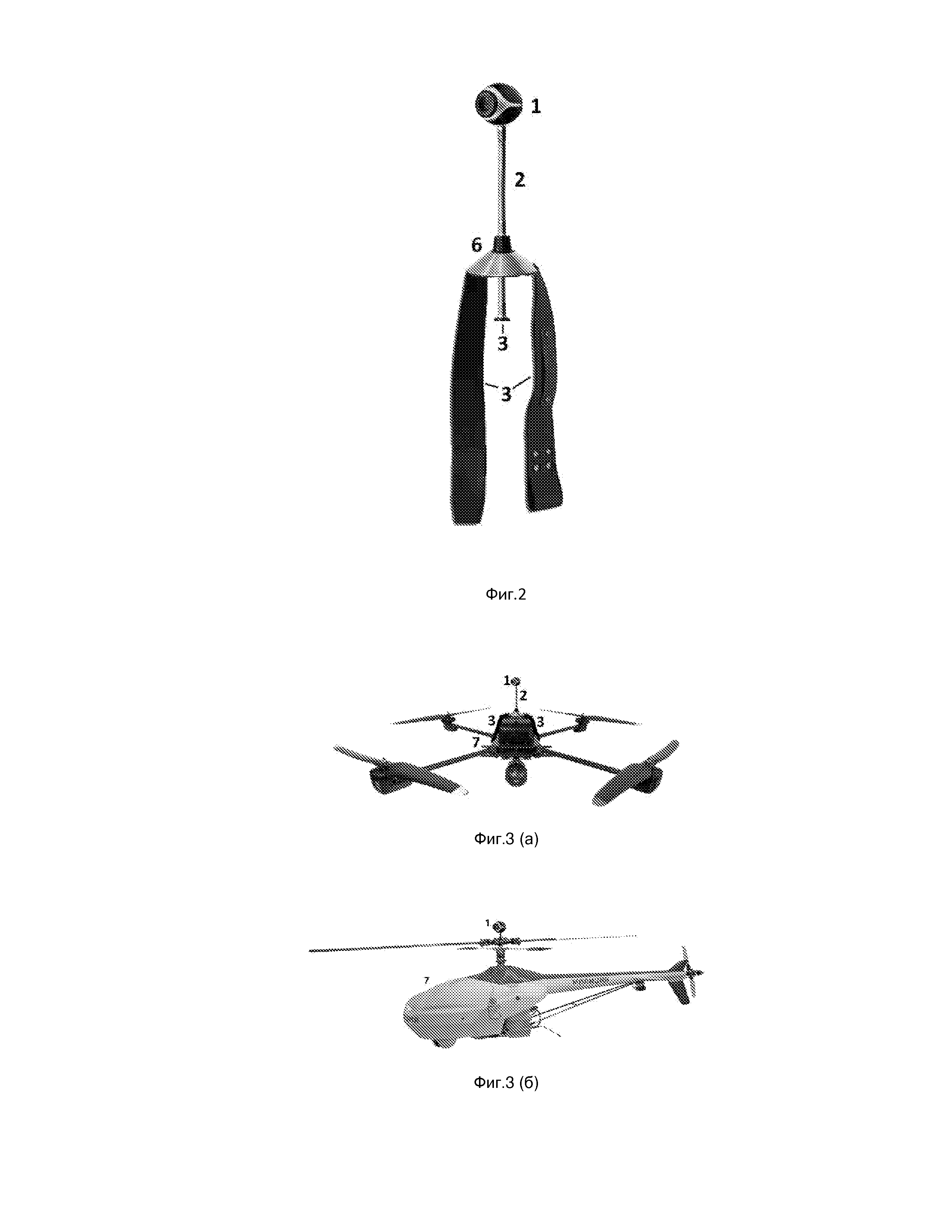
Фиг. 2 – “якорная” система посадки с креплениями для БПЛА;
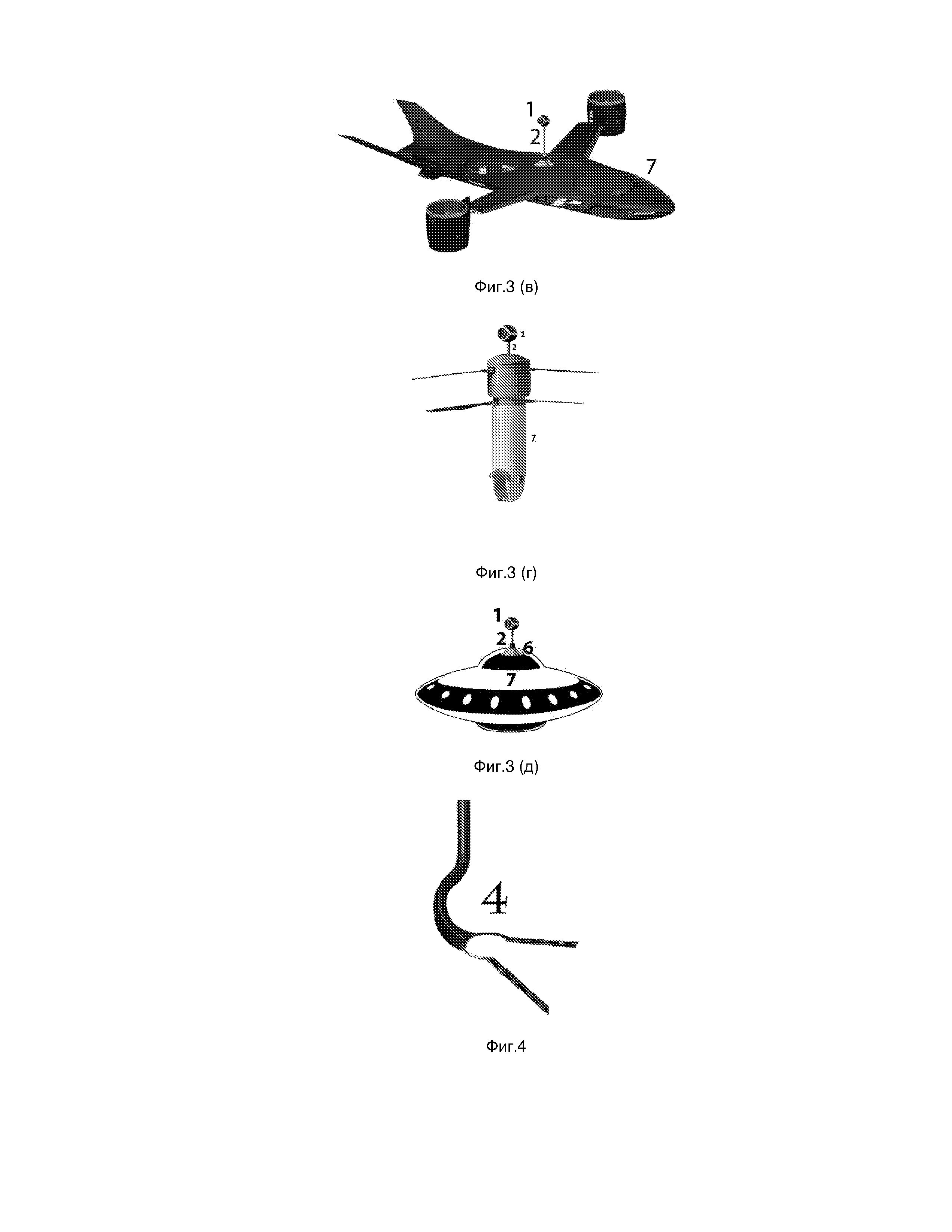
Фиг. 3 – разные варианты БПЛА с установленным сверху “якорем” системы посадки:
а) мультироторный БПЛА с установленным сверху “якорем” системы посадки;
б) БПЛА вертолетного типа с установленным сверху “якорем” системы посадки;
в) БПЛА самолетного типа вертикального взлета и посадки с установленным сверху “якорем” системы посадки;
г) БПЛА вертолетного типа соосной схемы
д) БПЛА Дисковые летательные аппараты
Фиг. 4 – вариант системы посадки, в котором модуль посадки выполнен с пассивным устройством захвата;
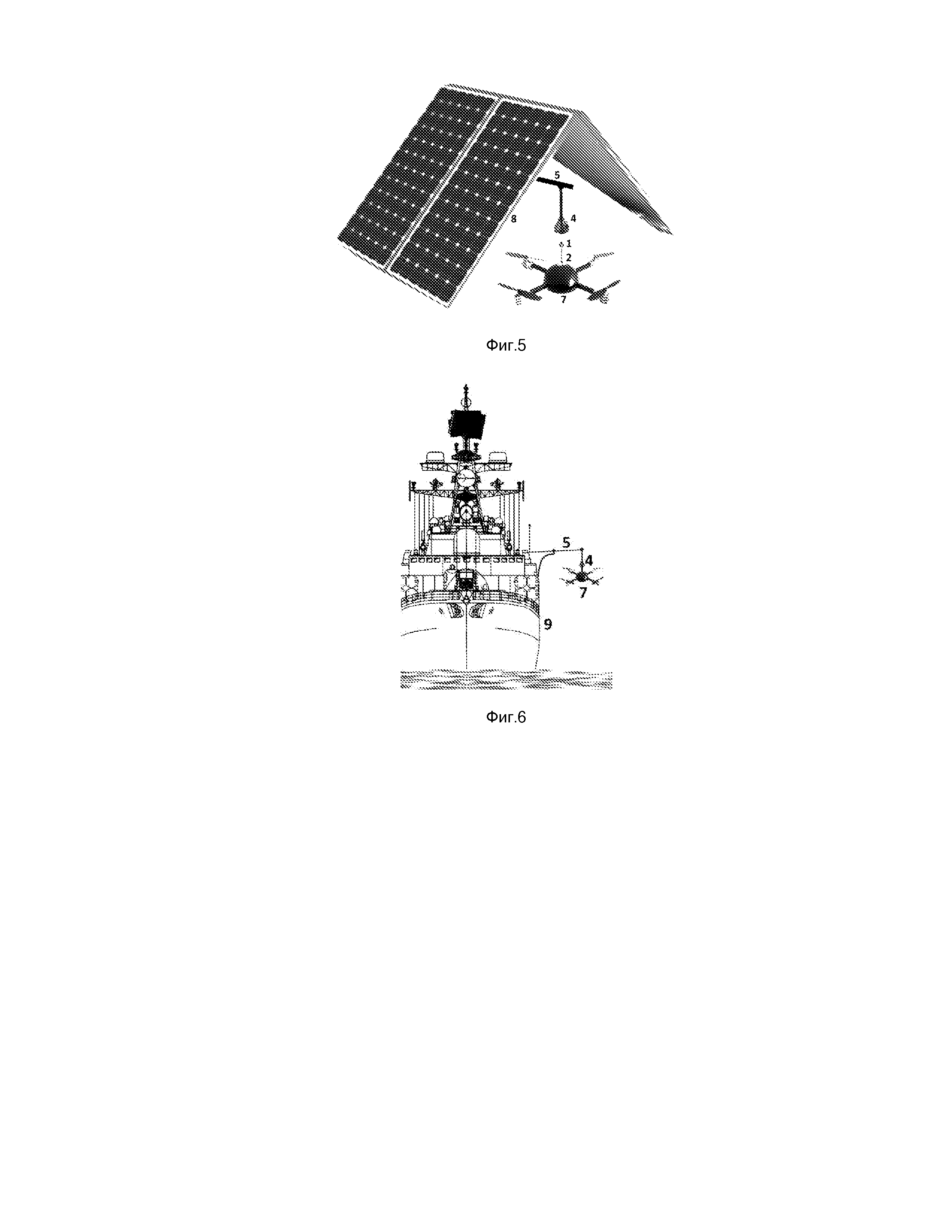
Фиг. 5 – вариант неземной станции, выполненной с крышей из солнечных батарей;
Фиг. 6 – вариант крепления системы посадки на корабле. Объект размещения основания с наземным модулем системы;
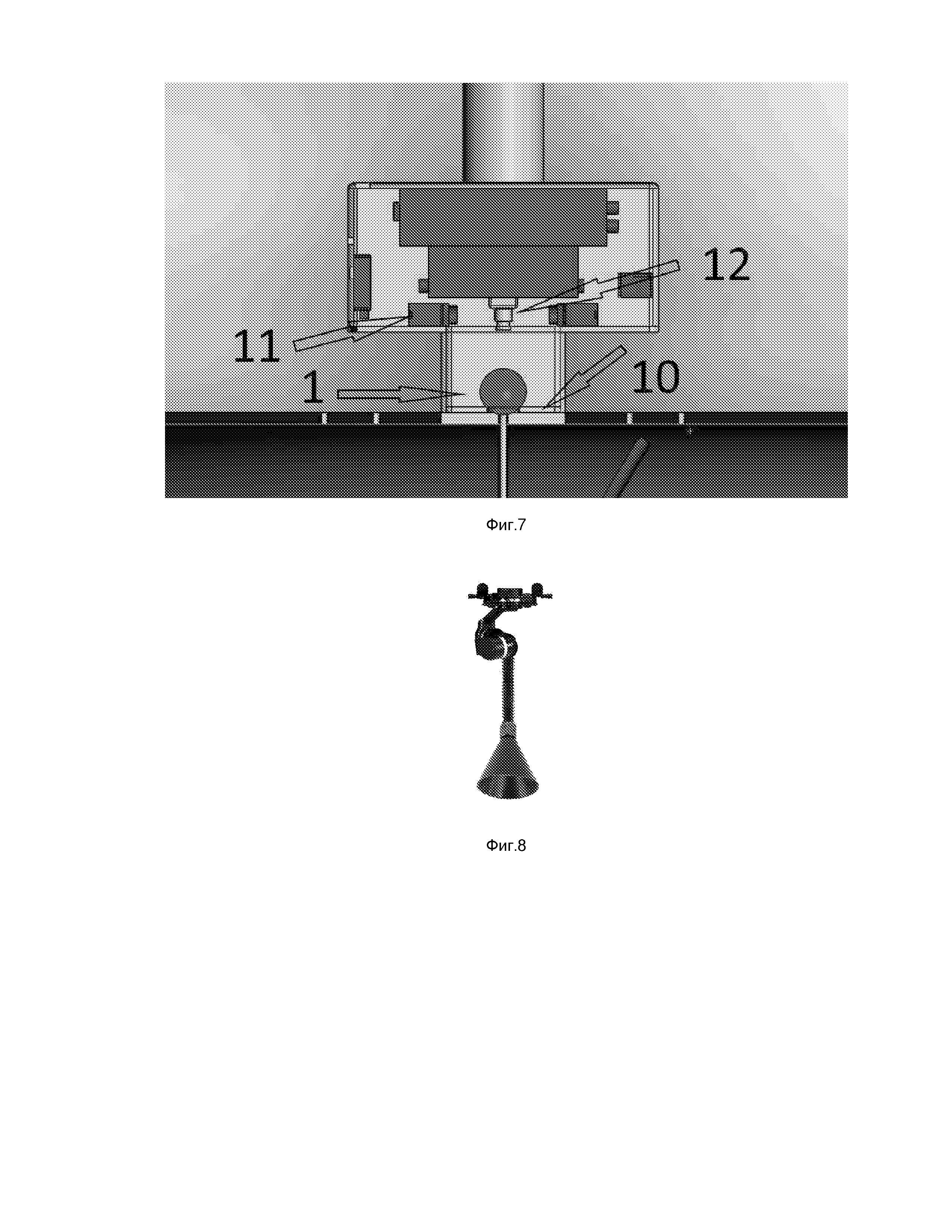
Фиг.7 – Боковой срез показывающий взаиморасположение элементов системы (наземной и воздушной части) при захвате якоря, устройством захвата УЗ.
Фиг.8 – устройство стабилизации, выполненное в виде трёх осевого подвеса.
На фигурах цифрами обозначены следующие позиции:
1 – якорь; 2 – стойка якоря; 3 – элементы крепления стойки якоря к летательному аппарату; 4 – устройство захвата; 5 – основание с наземным модулем системы посадки; 6 – корпус для размещения электронной части управления системой; 7 – летательный аппарат; 8 – крыша с солнечными батареями; 9 – объект размещения основания с наземным модулем системы; 10 – створки; 11 – мотор для открывания створок; 12 – камера системы технического зрения.
Раскрытие изобретения
Система посадки беспилотных летательных аппаратов вертикального взлета и посадки относится к области авиационной техники и предназначена для точной посадки беспилотных летательных аппаратов (БПЛА).
Система состоит из воздушного модуля, закрепляемого на летательном аппарате, и модуля, закрепленного на основании, расположенном на стационарном или подвижном объекте.
Воздушный модуль содержит якорь (1), размещенный на жесткой стойке якоря (2). Якорь (1) выполнен шарообразной формы. Якорь (1) расположен на верхней части корпуса летательного аппарата вертикального влета и посадки. Стойка (2) якоря (1) соединена с корпусом (6). При этом для предотвращения потерь, например, в аэродинамических свойствах аппарата, в мобильной части может отсутствовать корпус (6) и элементы его крепления (3), а все компоненты могут быть встроены в сам аппарат и скрыты в нем, и выезжать из корпуса, только во время посадки, питание реализовано от бортовой системы питания аппарата и активизироваться только после посадки аппарата.
В варианте реализации заявленного технического решения стойка (2) якоря (1) выполнена телескопической. При этом в варианте реализации заявленного технического решения для посадки летательных аппаратов вертолетного или дискового типа, якорь (1), закрепленный на стойке(2), выполнен с возможностью независимого вращения, в дополнение к чему, механизмы устройства захвата при захвате минимально противодействуют вращению якоря, за счет вкручивания якоря в наземную часть системы.
При этом, в варианте реализации заявленного технического решения стойка (2) якоря (1) выполнена с возможностью наклона в двух плоскостях с помощью моторов или сервомеханизмов, которые установлены у основания балки, так чтобы можно было наклонить якорь, в любую точку в верхней полусфере над аппаратом. При этом во время наведения, стойка якоря и устройство захвата могут находится не в вертикальном положении, а под углом навстречу друг другу, что облегчит осуществление захвата при наличии ветра или при движении объекта, на котором находится УЗ.
Корпус (6) посредством элементов крепления (3) закреплен на корпусе летательного аппарата. Также воздушный модуль содержит блок электронного управления, расположенный в корпусе, который содержит в себе инерциальную систему управления с гироскопами и акселерометрами и микрокомпьютер, который анализирует информацию метеоданные с метеодатчиков, команды от Наземной станции Управления и Беспилотного летательного аппарата и других систем станции и выдаёт команды на исполнительные механизмы, такие как створки устройства захвата.
Модуль посадки в варианте реализации заявленного технического решения содержит пассивное устройство захвата и имеет конструкцию, которая позволят наводить УЗ на якорь, если сам аппарат не имеет такой возможности или ему по каким-то причинам это сделать сложно. Конструкция основания в этом случае имеет вид “воронки”, в которую соскальзывает якорь БПЛА.
Модуль посадки в варианте реализации заявленного технического решения содержит активное устройство захвата. Устройство захвата якоря (1) состоит из купола (4) и соединительного элемента, с помощью которого купол (4) закреплен на основании (5). Основанием (5) модуля посадки может быть любая конструкция, на которой он может быть размещен и к которому может быть осуществлен свободный подлет: балка, рей, трос, провод, ветка дерева и т.п. Устройство захвата расположено на объекте посадки.
Купол (4) содержит, по меньшей мере, две створки (10), которые при помощи моторов (11), расположенных на осях створок, открываются во внутрь купола (4). После влета якоря (1) в купол (4), створки (10) закрываются, плотно примыкая, друг к другу, а аппарат садится сверху якорем (1) на упомянутые створки (10). В каждой створке (10) выполнен паз, таким образом, что в закрытом положении створок (10), данные пазы образуют отверстие, в которое плотно помещается стойка (2) якоря (1). При этом по окружности купола (4) выполнены выступы для упора створок (10) в закрытом положении, для исключения поломок створок (10) под весом беспилотного летательного аппарата вертикального взлета и посадки.
При этом модуль посадки выполнен с возможностью подзарядки беспилотного летательного аппарата. Механизм подзарядки расположен на системе посадки, в варианте реализации заявленного технического решения на створках, закрывающихся при захвате якоря (1) аппарата, на которых аппарат фактически повисает, обеспечивая самый простой и надежный контакт с зарядным устройством. На самих створках (10) при этом выполнены подпружиненные контакты, а на нижней части якоря (1) ответная часть. Контакт замыкается, когда аппарат подвисает на устройстве захвата. Подзарядка аппарата включается только после того как аппарат полностью зафиксировался.
Модуль посадки в варианте реализации заявленного технического решения дополнительно снабжен крышей на поверхности, которой расположены элементы солнечных батарей.
Модуль посадки в варианте реализации заявленного технического решения наземная часть выполнена в боксе, с возможностью выдвижения основания наземного модуля.
Модуль посадки и воздушный модуль системы посадки могут быть не только автономными, но быть подключенными к внешним источникам энергоснабжения и размещаться стационарно.
При этом устройство захвата в варианте реализации заявленного технического решения дополнительно снабжено устройством стабилизации. Устройство стабилизации позволяет устройству захвата находиться в одной точке для обеспечения надежной посадки, например, при качке судна, а также, при необходимости, перемещает устройство захвата для сближения с якорем, если летательному аппарату затруднительно подлететь самостоятельно. Устройство стабилизации находится между креплением наземного сегмента системы, например, к стене и самой системой. Представляет собой устройство из электронной платы стабилизации (с микрокомпьютером, гироскопами, акселерометрами и магнитометром) и трех осей, на которой установлено один или два мотора, получающие команды от платы стабилизации. Плата стабилизации всегда измеряет курс и свое положение относительно горизонта и передает управляющие команды по оси yaw poll и pith на моторы, которые держат всю наземную часть системы максимально горизонтально и по курсу.
Устройство захвата якоря (1), которое может менять положение в зависимости от крепления якоря (1) на летательном аппарате. Данную систему можно использовать, не только для подлета снизу вверх, но и для подлета сбоку, для этого необходимо установить якорь сбоку аппарата. При подлете аппарата к наземной части системы, система с устройством захвата, за счёт устройства стабилизации, повернет систему навстречу якорю (1). При зацеплении система может остаться в положении, при котором произошло зацепление, а может перейти в обычное вертикальное положение, на аппарат будет висеть уже под наклоном. Такой вариант может быть полезен в случае невозможности установки якоря сверху системы.
Система посадки беспилотных летательных аппаратов вертикального взлета и посадки содержит систему наведения, часть которой установлена на аппарате, часть на наземном сегменте.
Система наведения состоит из трех подсистем, позволяющих привести аппарат в нужную точку:
– приёмника глобальных навигационных спутниковых систем (ГНСС), который приводит аппарат в круг системы на высоте, где подключаются ультразвуковые датчики indoor. Расположен сверху аппарата, так чтобы ничто не затеняло верхнюю полусферу;
– ультразвуковых датчиков indoor навигации, которые ведут аппарат под купол/устройство захвата системы на расстояние, с которого происходит переключение на систему технического зрения. Один из датчиков стоит на самом аппарате в верхней части. Остальные датчики (1 и более, лучше не менее 3) создают локальную систему координат и стоят на наземной части системы, минимум один из датчиков должен стоять в нижней части системы с обзором нижней полусферы;
– системы технического зрения. Система технического зрения состоит из видеокамеры и микрокомпьютера для обработки изображений. Камера для системы технического зрения, в варианте реализации заявленного технического решения, установлена на якоре и направлена в сторону устройства захвата модуля посадки.
Камера для системы технического зрения (12), в варианте реализации заявленного технического решения, установлена на устройстве захвата и направлена в сторону якоря воздушного модуля системы посадки.
Установка камеры на якоре обеспечивает минимальную задержку сигнала, но увеличивает общий вес системы за счет установки камеры и микрокомпьютера для обработки изображений, на борту аппарата, в корпусе самого БПЛА.
В системе посадки беспилотного летательного аппарата заложены алгоритмы для автоматического наведения друг на друга якоря и устройства захвата с открытым программным обеспечением, которые может использовать автопилот аппарата для реализации посадки.
Видеокамера выполнена с возможностью передачи изображения оператору в реальном времени, что даёт возможность контроля или управления аппаратом для посадки в ручном режиме.
При этом на наземной части системы, выполнены хорошо различимые метки для системы наведения. В варианте реализации заявленного технического решения в качестве меток для системы наведения использованы отдельные разноцветные лампочки или светодиодные ленты, расположенные по кругу, которые расположены вокруг створок, куда залетает БПЛА и/или по кромке купола с нижней стороны и направлены вниз. В предпочтительном варианте заявленного технического решения светодиодные ленты выполнены в инфракрасном диапазоне.
В варианте реализации заявленного технического решения на модуль посадки системы посадки беспилотных летательных аппаратов вертикального взлета и посадки дополнительно установлены источники освещения, в частности фонари, подсвечивающие метки системы наведения.
При этом каждая подсистема системы наведения системы посадки беспилотных летательных аппаратов вертикального взлета и посадки выполнена с большой точностью, чем предыдущая и перестаёт работать с того момента, как начинает работать следующая, при этом в случае если следующая подсистема не может выполнить наведение и переход к следующему этапу, навигация осуществляется посредством предыдущей подсистемы системы наведения. Также при вылете беспилотного летательного аппарата из системы посадки беспилотных летательных аппаратов вертикального взлета и посадки система навигации работает последовательно в обратном порядке.
Система посадки летательного аппарата вертикального взлета и посадки функционирует следующим образом.
Беспилотный летательный аппарат подлетает в зону действия подсистемы наведения системы посадки летательного аппарата вертикального взлета и посадки, получая корректирующие команды от этой подсистемы, влетает якорем в систему захвата и затем повисает на ней, после чего закрывается контейнер (если он есть), на котором расположена система посадки и включается механизм подзарядки/дозаправки.
Мультироторный БПЛА подлетает под систему посадки. В момент, когда аппарат находится под устройством захвата наземного модуля системы посадки, створки купола открываются, чтобы якорь (1), установленный БПЛА, мог влететь внутрь системы.
После влета внутрь системы устройство захвата закрывает створки, а БПЛА отключает двигатели. Под собственным весом и при помощи направляющих, БПЛА точно фиксируется в устройстве захвата. После фиксации аппарат переходит в режим стационарной камеры и зарядки аккумуляторов.
При получении команды на взлёт, всё происходит в обратном порядке, отключается система зарядки, БПЛА включает двигатели и поднимается над устройством захвата, чтобы дать возможность створкам открыться внутрь. После открытия шторок БПЛА спускается и вылетает из-под системы.
Любой БПЛА, изображенный на Фиг.3, а именно мультироторный БПЛА с установленным сверху “якорем” системы посадки; б) БПЛА вертолетного типа с установленным сверху “якорем” системы посадки; в) БПЛА самолетного типа вертикального взлета и посадки с установленным сверху “якорем” системы посадки; г) БПЛА вертолетного типа соосной схемы; д) дисковые летательные аппараты могут произвести подлет под базовую станцию и приземлиться (пристыковаться), влетев “якорем” в устройство захвата, затем после фиксации аппарата в системе, отключить двигатели и перейти в режим стационарного мониторинга и заряда.
Данная система посадки летательного аппарата вертикального взлета и посадки более эффективна перед другими системами за счет следующих своих преимуществ:
– возможность размещения УЗ на любых, с соответствующими размерами для безопасной эксплуатации, объектах: балка, рея, трос, провод, ветка дерева и т.д.;
– простота установки на любые модели мультироторных беспилотных летательных аппаратов и конвертопланов;
– возможность осуществлять посадку не только на стационарных, но и на перемещающихся объектах, например судах;
– возможность вынесения зоны посадки за пределы специальных зон и зон общего пользования: палуба, вертолетная площадка и т.д.;
– возможность посадки аппарата в местах непредназначенных для этого, без особого риска для состояния аппарата и его комплектации, например, горной или болотистой местности;
– возможность точной автономной (неконтролируемой) посадки на стационарных объектах или на объектах с вычисляемыми координатами на момент необходимости посадки, для входа в зону действия автоматической системы наведения (например, по маршруту следования судна);
– отсутствие негативных последствий при неудачном захвате якоря устройством захвата - простота эксплуатации;
- простота конструкции;
- низкая себестоимость для простых комплектаций;
- универсальность системы для аппаратов, близких по физическим характеристикам;
- возможность использования в любое время суток, при наличии соответствующих систем визуального контроля и наведения.
Система посадки беспилотного летательного аппарата самолетного типа
Система посадки беспилотного летательного аппарата самолетного типа

