Результат интеллектуальной деятельности: ОТОБРАЖЕНИЕ ОБЪЕМА С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ДАТЧИКОВ ФОРМЫ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к оптическому датчику формы, фиксированному одним или несколькими медицинскими инструментами (например, баллоны, корзины, трубки с памятью формы, и т.д.) в частично или полностью ограниченном анатомическом объеме, чтобы распознавать трехмерную ("3D") форму части или совокупности границ анатомического объема. Настоящее изобретение, в частности, относится к отображению 3D формы части или всей совокупности границы анатомического объема, основанному на возможности распознавания формы посредством оптического датчика формы и, в случае необходимости, физической геометрии медицинского инструмента(ов).
УРОВЕНЬ ТЕХНИКИ
Как известно из уровня техники, система визуализации может быть использована для известных методов медицинской визуализации (например, рентген, компьютерная томография, магнитно-резонансная томография, УЗИ, позитронно-эмиссионная томография и однофотонная эмиссионная компьютерная томография) для генерации изображения целевого органа пациента (например, потенциально злокачественного органа или неправильно функционирующего органа). Эти изображения могут быть использованы врачом для диагностики пациента и/или планирования и осуществления различных терапий органа (например, хирургии под визуализационным контролем, лучевая терапия и т.д.). Для способствования точности плана лечения для целевого органа, целевой орган может нуждаться в сегментировании для идентификации и визуализации контура целевого органа в изображении.
Однако, так как изображение может быть трудным для чтения, например, если металл скрывает или мешает анатомии, идентификация и визуализация контура целевого органа в изображении могут быть невозможными или ненадежными. Сегментация изображения, как правило, требует высококвалифицированного врача для выбора различных точек на поверхности целевого органа, чтобы в электронном виде изобразить контур целевого органа. Это может занять много времени и подвержено ошибкам. Более конкретно, разграничение границы органа и внутренних жидкостей может быть затруднено из-за плохой визуализации органа. Чтобы помочь выделить детали анатомии, может быть использовано контрастное вещество, хотя некоторые люди чувствительны к контрасту.
Как вариант, может быть использована программа автоматической сегментации , такая как, например, способ репараметризации границы, раскрытый в опубликованной заявке на патент США 2008/0008369 A1. Однако, как признано в вышеупомянутой публикации, границы целевого органа могут быть трудно определимы по различным причинам, в том числе замаскированы наличием спекл шума, слабо наблюдаемы в изображениях из-за затенения от вышележащих особенностей и ложных границ, образованных двумя областями различных уровней серого или в качестве границы между двумя различными текстурами, или как гибрид двух. Эта сложность приводит к высокой частоте отказов для изображения на основе алгоритмов автоматической сегментации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предоставление способа отображения для измерения формы анатомического объема (например, полых органов), а также, при необходимости, измерения различных параметров, включающих в себя, но неограниченных, движение, деформацию, магнетизм, напряжение, расход газа, поток текучей среды, температуру, давление, биохимическое состояние и любые другие характеристики, связанные с внутренними свойствами тканей или реакциями ткани на внешние факторы. В частности, измерения формы/параметра могут происходить в течение продолжительного времени, обеспечивая при этом четырехмерную ("4D") информацию анатомического объема. С этой целью настоящее изобретение предусматривает датчик оптической формы упорядоченно расположенный и закрепленный в частично или полностью ограниченном объеме медицинским инструментом(ами), чтобы отобразить трехмерную ("3D") форму части или полностью границу объема.
Одной формой осуществления настоящего изобретения является устройство отображения объема, размещенное в анатомическом объеме для отображения части или всей границы анатомического объема. Устройство отображения объема использует один или несколько медицинских инструментов, причем один или каждый медицинский инструмент является переходящим между структурной конфигурацией развертывания для упорядоченного расположения медицинского инструмента(ов) в анатомическом объеме и структурной конфигурацией отображения для закрепления одного или каждого медицинского инструмента относительно границы анатомического объема.
Примеры медицинского инструмента(ов) включают в себя, но не ограничиваются ими, (1) медицинский баллон, переходный между спущенным сжатым состоянием и накаченным расширенным состоянием, (2) медицинскую корзину, включающую в себя материал с памятью формы для перехода медицинской корзины между удлиненной формой и сферической формой, и (3) медицинскую трубку, включающую в себя материал с памятью формы для перехода медицинской трубки между удлиненной формой и спиральной формой.
Устройство отображения объема дополнительно использует оптический датчик формы, присоединенный к медицинскому инструменту(ам), причем оптический датчик формы конструктивно выполнен с возможностью генерировать один или более кодированных оптических сигналов, указывающих форму части или полностью границы анатомического объема в ответ на переход одного или каждого медицинского инструмента от структурной конфигурации развертывания к структурной конфигурации отображения в анатомическом объеме.
Вторая форма осуществления настоящего изобретения является системой отображения объема, применяющей вышеупомянутое устройство отображения объема и далее применяющей модуль отображения объема для отображения части или всей границы анатомического объема на основе кодированного оптического сигнала(ов).
Третья форма осуществления настоящего изобретения является способом отображения объема для использования вышеупомянутой системы отображения объема. Способ отображения объема включает упорядоченное расположение одного или каждого медицинского инструмента в анатомическом объеме и закрепление одного или каждого медицинского инструмента, как расположенного внутри анатомического объема у границы анатомического объема. Способ отображения объема дополнительно включает, в ответ на закрепление одного или каждого медицинского инструмента у границы анатомического объема, функционирование оптического датчика формы, чтобы генерировать один или более кодированных оптических сигналов, указывающих форму части или полностью границы анатомического объема, и отображение части или всей границы анатомического объема, основанное на кодированном оптическом сигнале(ах).
Вышеуказанные формы осуществления и другие формы осуществления настоящего изобретения, а также различные признаки и преимущества настоящего изобретения, станут далее очевидными из нижеследующего подробного описания различных вариантов осуществления настоящего изобретения в совокупности с прилагаемыми чертежами. Подробное описание и чертежи служат только иллюстрирующими настоящее изобретение, а не ограничивающими, объем настоящего изобретения определяется прилагаемой формулой изобретения и ее эквивалентами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
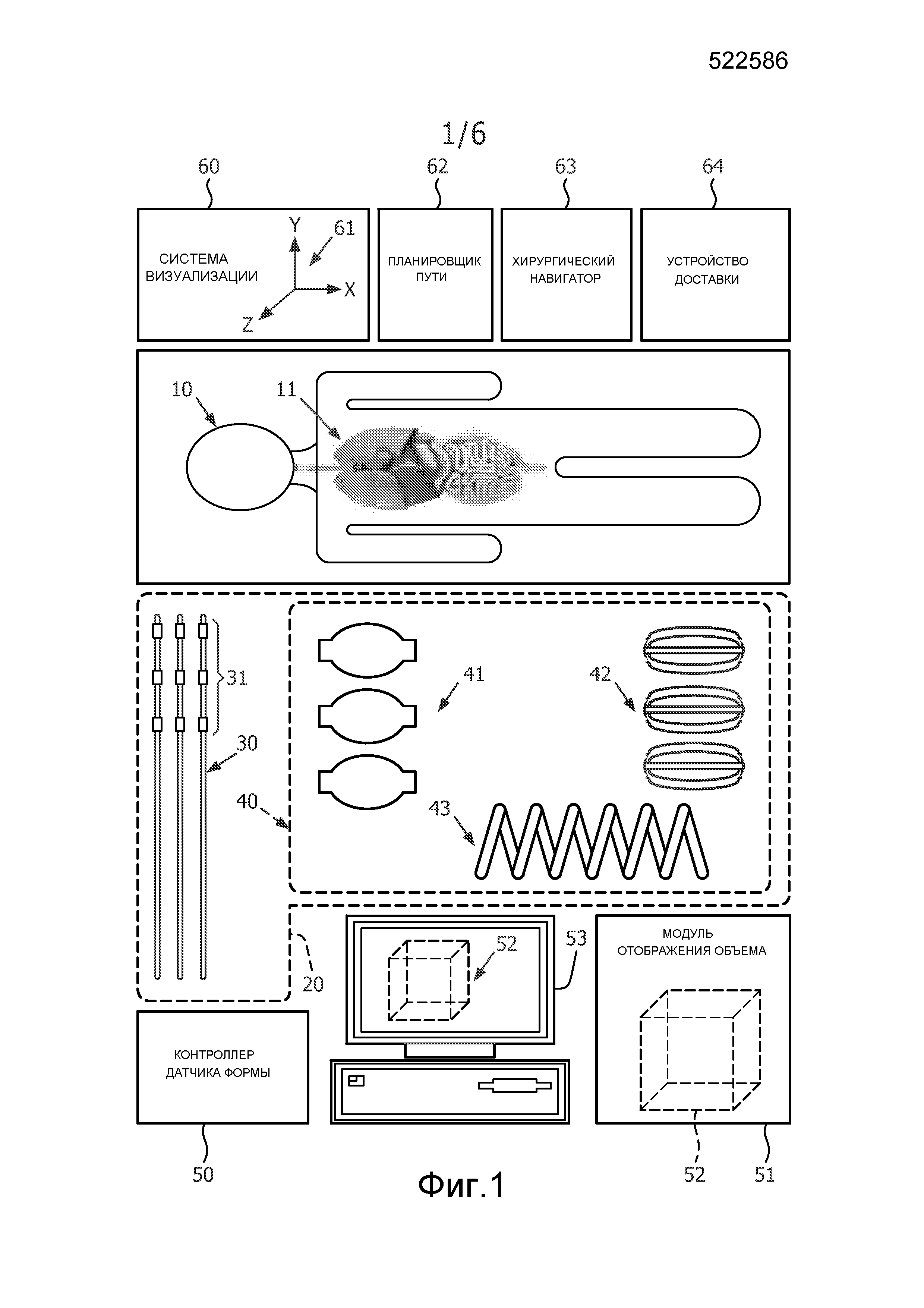
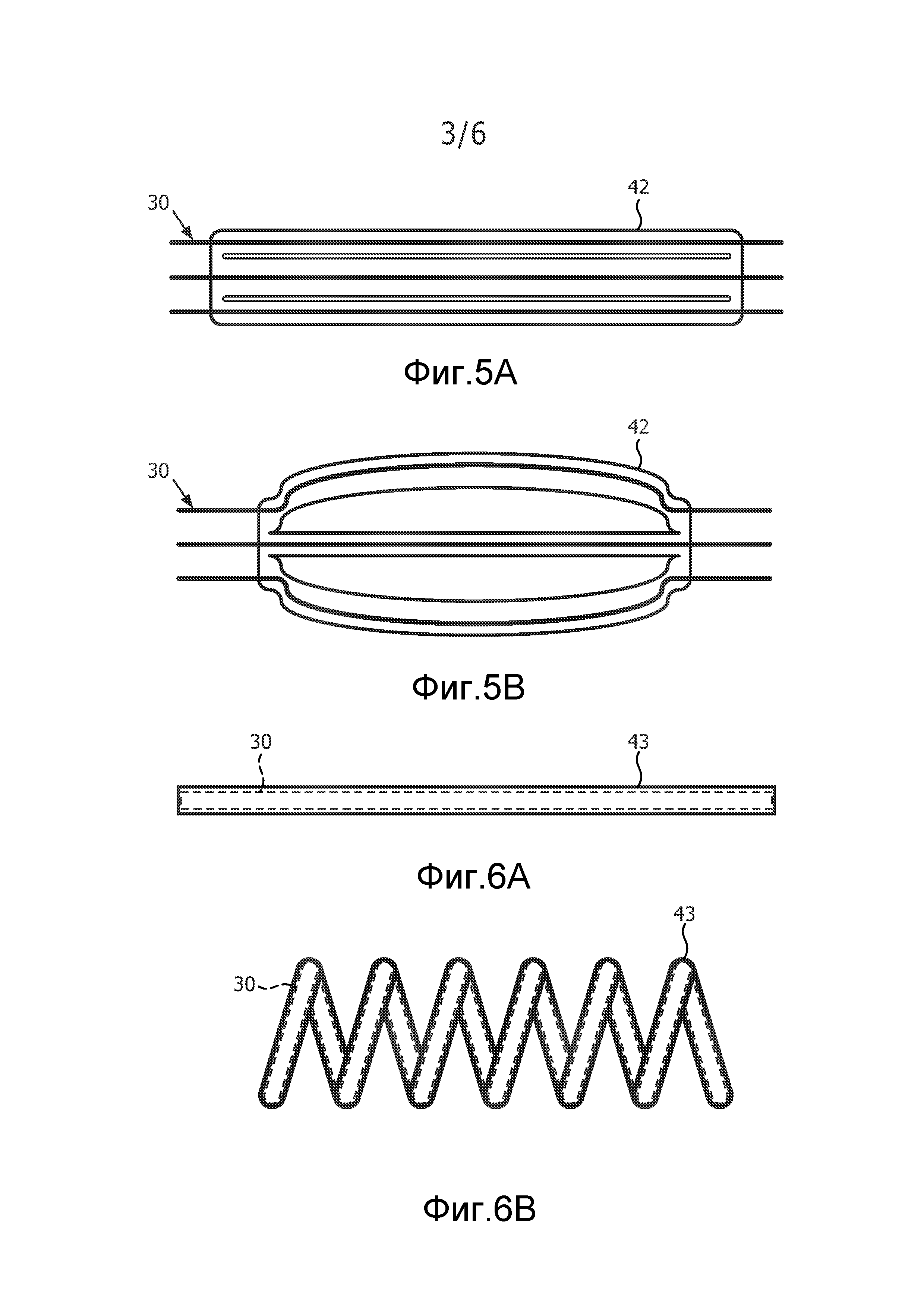
Фиг. 1 иллюстрирует примерный вариант осуществления системы отображения объема в соответствии с настоящим изобретением.
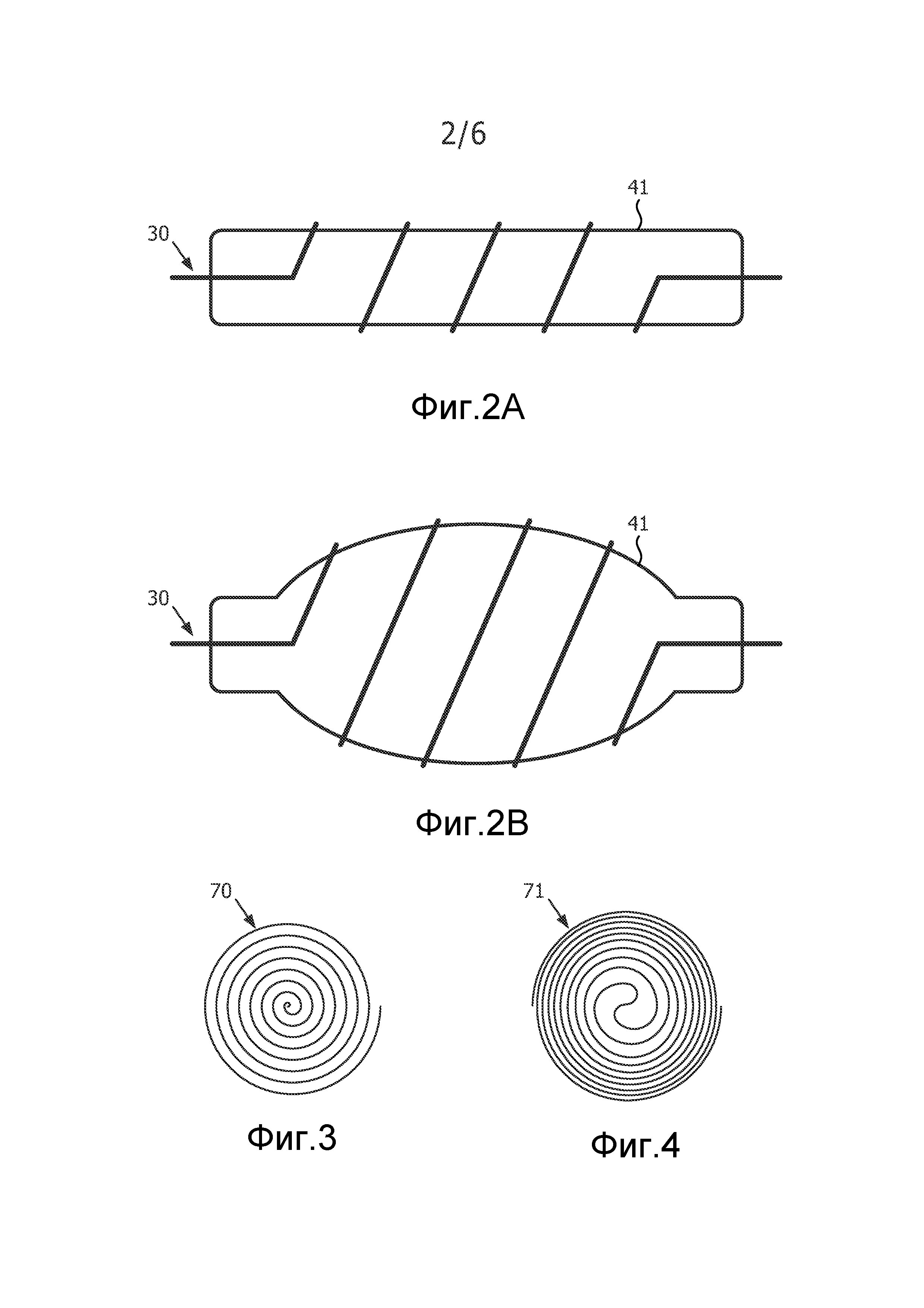
Фиг. 2А и 2В иллюстрируют примерный вариант осуществления устройства отображения объема, имеющего медицинский баллон в спущенном состоянии и в накаченном состоянии, соответственно, в соответствии с настоящим изобретением.
Фиг. 3 иллюстрирует первый примерный вариант осуществления спиральной конфигурации оптического волокна, присоединенного к медицинскому баллону, показанному на Фиг. 2А и 2В.
Фиг. 4 иллюстрирует второй примерный вариант осуществления спиральной конфигурации оптического волокна, присоединенного к медицинскому баллону, показанному на Фиг. 2А и 2В.
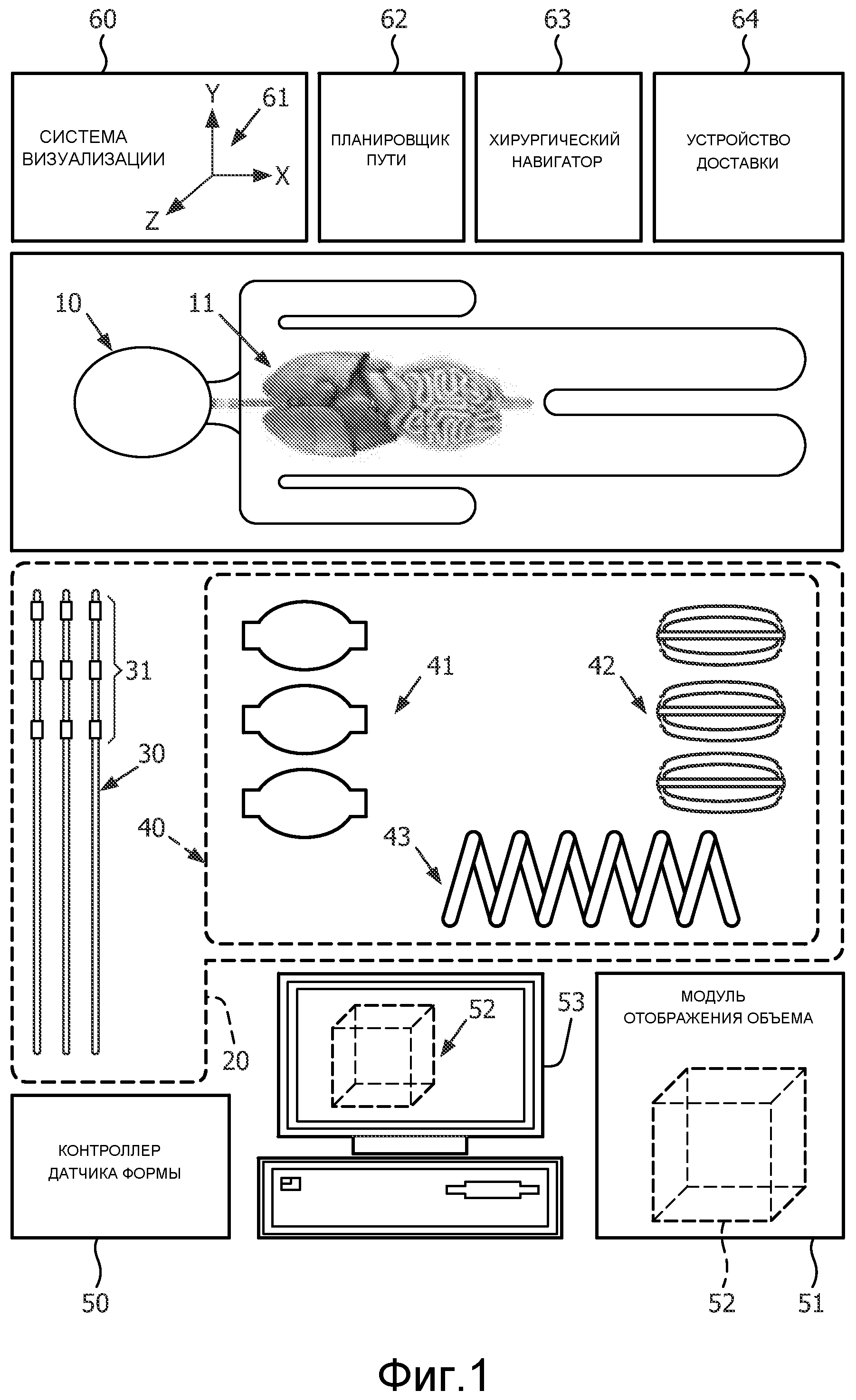
Фиг. 5A и 5B иллюстрируют примерный вариант осуществления устройства отображения объема, имеющего медицинскую корзину с удлиненной формой и сферической формой, соответственно, в соответствии с настоящим изобретением.
Фиг. 6A и 6B иллюстрируют примерный вариант осуществления устройства отображения объема, имеющего медицинскую трубку с удлиненной формой и спиральной формой, соответственно, в соответствии с настоящим изобретением.
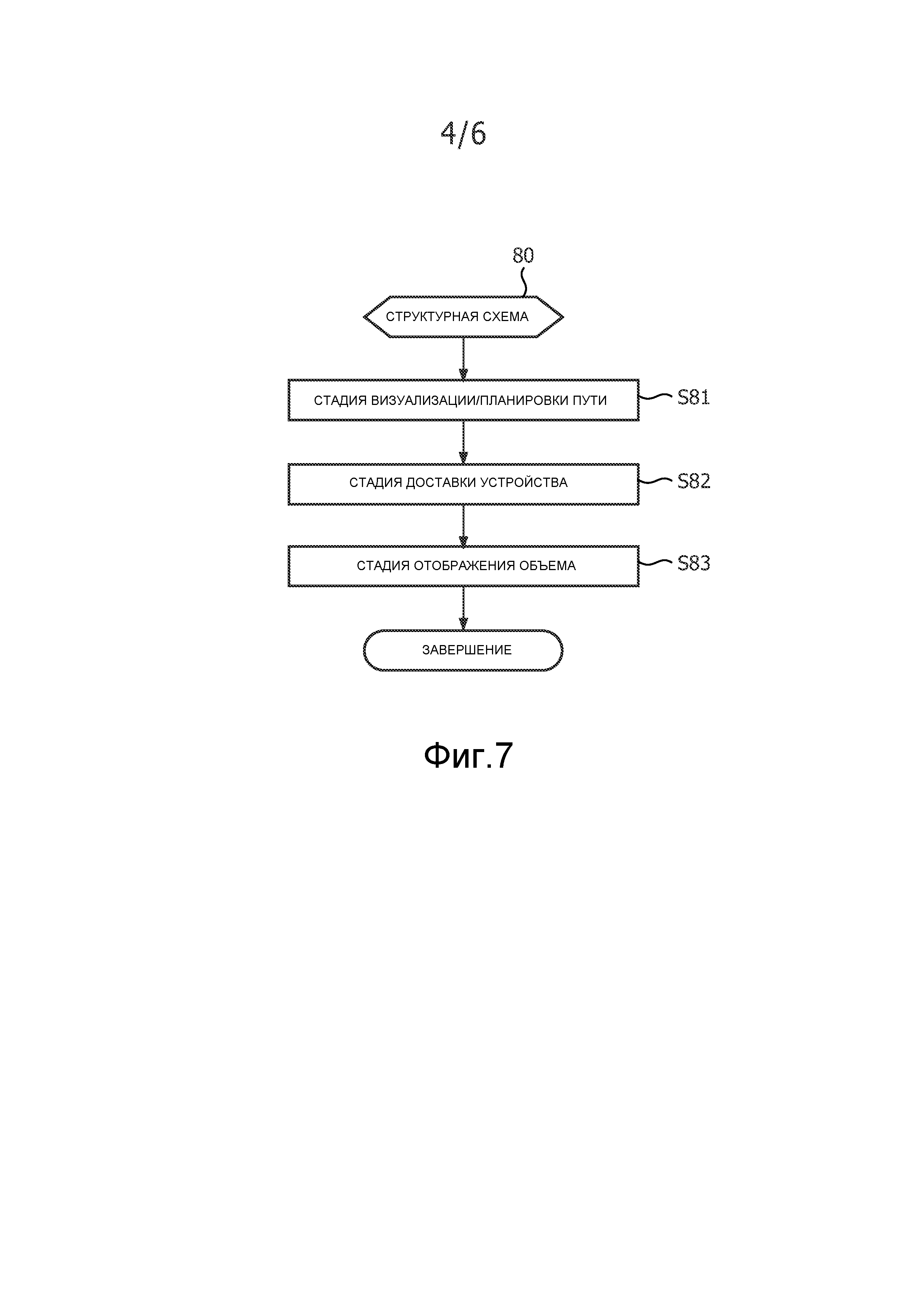
Фиг. 7 иллюстрирует примерный вариант осуществления способа отображения объема в соответствии с настоящим изобретением.
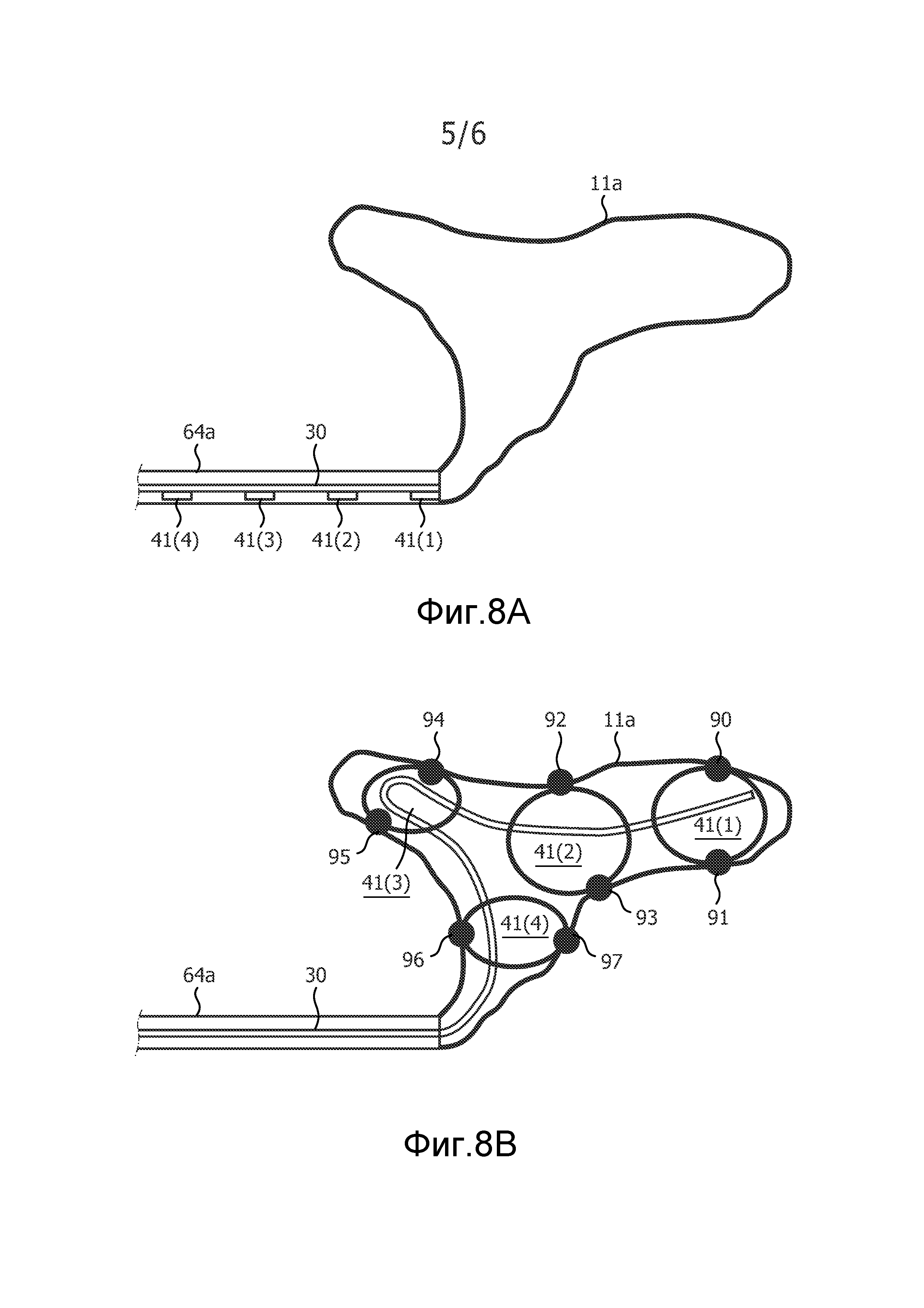
Фиг. 8А и 8В иллюстрируют первое примерное выполнение отображения анатомического объема в соответствии со структурной схемой, показанной на Фиг. 7.
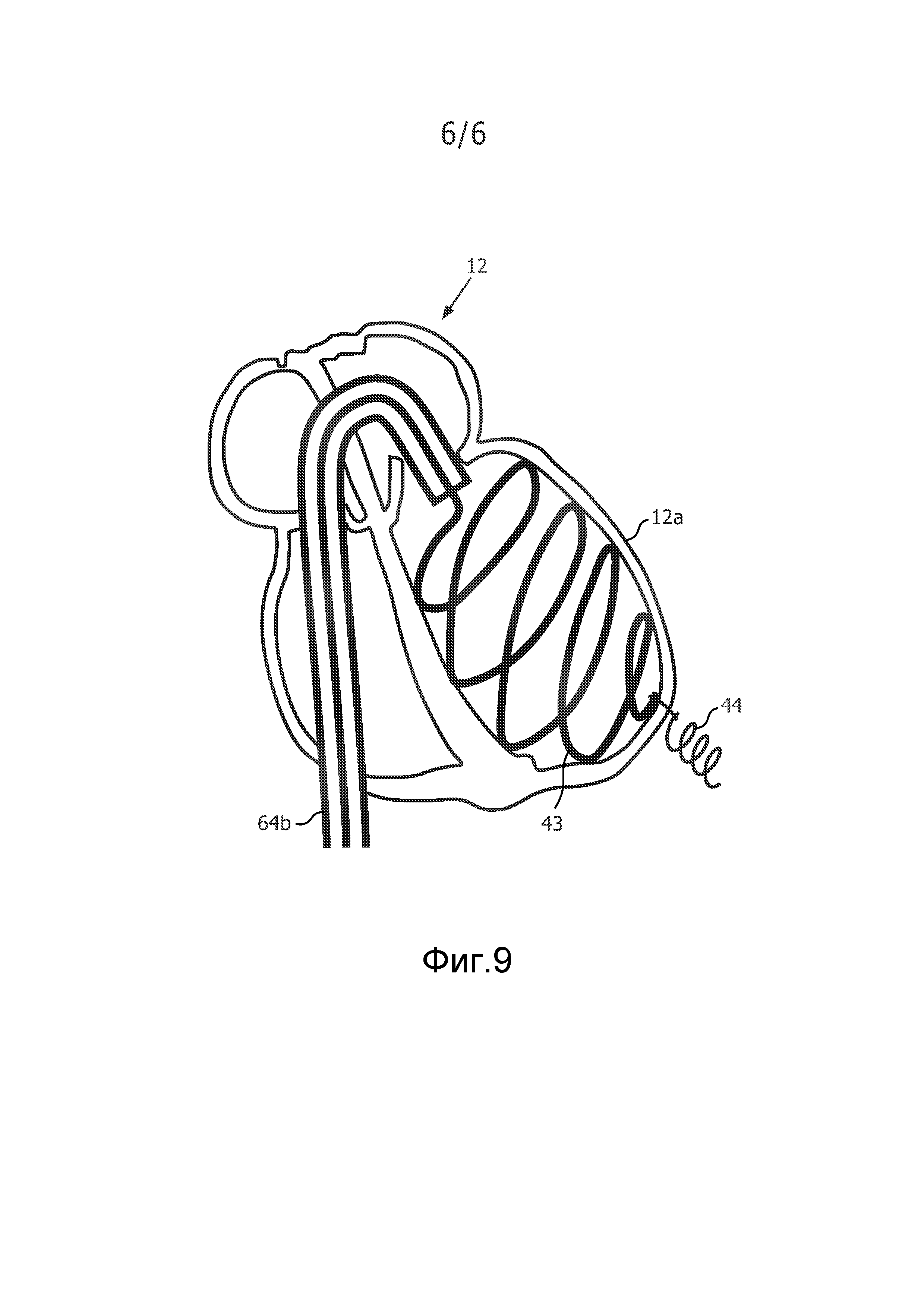
Фиг. 9 иллюстрирует второе примерное выполнение отображения анатомического объема в соответствии со структурной схемой, показанной на Фиг. 7.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 иллюстрирует устройство 20 отображения объема настоящего изобретения, использующее один или несколько оптических датчиков 30 формы, и один или более медицинских инструментов 40. Как правило, для целей отображения частично или полностью закрытого анатомического объема, каждый оптической датчик 30 формы является упорядоченно расположенным и закрепленным в ограниченном анатомическом объеме медицинским инструментом(ами) 40, чтобы отображать трехмерную ("3D") форму части или всей границы анатомического объема и дополнительно измерять различные параметры, включающие в себя, но не ограничивающиеся, движение, деформацию, магнетизм, напряжение, расход газа, поток текучей среды, температуру, давление, биохимическое состояние и любые другие характеристики, связанные с внутренними свойствами ткани или реакции ткани на внешние факторы. Примеры анатомического объема включают в себя, но не ограничиваются, полые органы 11 пациента 10, как показано на Фиг. 1, состоящие из сердца, легких, мочевого пузыря, желудка, кишечника, матки и толстой кишки.
В частности, для целей настоящего изобретения оптический датчик 30 формы имеет широкое определение в настоящем документе, как любой предмет структурно сконфигурированный для передачи света путем последовательных внутренних оптических отражений с помощью массива оптических датчиков деформации 31, и каждый оптический датчик деформации массива 31 в широком смысле определяется в настоящем документе как любой предмет, структурно сконфигурированный для отражения определенной длины волны света при передаче всех других длин волн света, тем самым отраженная длина волны может быть смещена в зависимости от внешнего сигнала, приложенного к оптическому датчику 30 формы. Примеры датчика оптической 30 формы включают в себя, но не ограничиваются, гибкое оптически прозрачное стеклянное или пластиковое волокно, включающее массив волоконных брэгговских решеток объединенных вдоль длины волокна, как известно из уровня техники, и гибкое оптически прозрачное стеклянное или пластиковое волокно, имеющее естественные случайные вариации в его оптическом показателе преломлении, возникающие вдоль длины волокна, как известно из уровня техники (например, рэлеевское рассеяние).
В то время как только три (3) датчика 31 показаны для каждого оптического волокна 30 для ясности, на практике оптические волокна 30 будут использовать уменьшенный вариант датчиков 31 во множестве по отношению к длине оптического волокна 30, как будет понятно специалисту в данной области техники.
На практике каждый оптический датчик 30 формы может использовать один или более массивов оптических датчиков деформации в любом расположении, что облегчает 3D детектирование изгиба оптического датчика 30 формы.
Например, в варианте осуществления единственного оптического волокна, оптический датчик 30 формы является единственным оптическим волокном, имеющим три (3) массива волоконных брэгговских решеток, расположенных на 120° интервале, как требуется для 3D детектирования изгиба оптическим датчиком 30 формы, или имеющим шесть (6) массивов волоконных брэгговских решеток, расположенных на 60° интервале, как требуется для 3D детектирования изгиба оптическим датчиком 30 формы. В любом случае, дополнительный массив волоконных брэгговских решеток может быть использован в качестве центрального массива волоконных брэгговских решеток в устройстве.
Также например, в варианте осуществления множества оптических волокон, оптический датчик 30 формы включает в себя три (3) оптических волокна, причем каждое оптическое волокно, имеет один массив волоконных брэгговских решеток и оптические волокна расположены на 120° интервале, как требуется для 3D детектирования изгиба оптическим датчиком 30 формы, или включает в себя шесть (6) оптических волокон, причем каждое оптическое волокно, имеет один массив волоконных брэгговских решеток и оптические волокна расположены на 60° интервале, как требуется для 3D детектирования изгиба оптическим датчиком 30 формы. В любом случае, дополнительное оптическое волокно может быть использовано в качестве центрального оптического волокна в устройстве.
датчик 30 формы генерирует кодированный оптический сигнал для каждого массива оптических датчиков деформации на основе последовательных внутренних оптических отражений, что указывает форму оптического датчика 30 формы как любой образец мгновенной формы оптического датчика 30 формы. Более конкретно, для образца мгновенной формы или в процессе нескольких образцов формы, кодированный оптический сигнал указывает форму оптического датчика 30 формы как оптического датчика 30 формы, который является упорядоченно расположенным и прикрепленным в границах объема медицинским инструментом(ами) 40. Кодированный оптический сигнал, следовательно, облегчает использование каждого оптического датчика 30 формы для отображения границы объема (например, отображение объема 52 сердца 12 как показано на Фиг. 1), как в последствии будет объяснено более подробно в настоящем документе, и для визуального изображения отображенного объема (например, дисплей 53 отображенного объема 52, как показано на Фиг. 1).
Для измерения параметра, массив оптических датчиков деформации 31 может быть составлен из и/или покрыт материалами, которые обеспечивают такие измерения как описаны в WO 2011/048509, включенной в настоящий документ посредством ссылки. Примеры таких материалов включают в себя, но не ограничиваются, кристаллы Bi12TiO20 для измерения напряжения, металлические сплавы Ni-Mn-Ga с памятью формы для магнитного детектирования и осаждение металлических паров Zn для повышения температурного детектирования.
Для целей настоящего изобретения, медицинский инструмент 40 широко определяется в настоящем документе, как любой предмет, структурно сконфигурированный быть переходным между развертываемой структурной конфигурацией для упорядоченного расположения медицинского инструмента 40 в анатомическом объеме и отображаемой структурной конфигурацией для закрепления медицинского инструмента 40 у границы анатомического объема. Примеры медицинского инструмента 40 включают в себя, но не ограничиваются, медицинский баллон 41 переходный между спущенным сжатым состоянием и накачанным расширенным состоянием, медицинскую корзину 42, включающую в себя материал с памятью формы для перехода медицинской корзины между деформированной удлиненной формой и естественной сферической формой, и медицинскую трубку 43, включающую в себя материал с памятью формы для перехода медицинской трубки между деформированной удлиненной формой и естественной спиральной формой.
Каждый оптический датчик 30 формы присоединен к медицинскому инструменту(ам) 40 в порядке, который облегчает упорядоченное расположение и закрепление в ограниченном анатомическом объеме медицинскому инструменту(ам) 40, чтобы отображать 3D форму части или полностью границы анатомического объема. Для целей настоящего изобретения термин "присоединен" является широко определенным, как любые средства предназначенные для физического взаимодействия оптического датчика 30 формы с медицинским инструментом 40 в соответствии с которыми переход между развертываемой структурной конфигурацией и отображаемой структурной конфигурацией медицинского инструмента 40 детектируется оптическим датчиком 30 формы, как внешний стимул, примененный для оптического датчика 30 формы во время перехода.
Например, в варианте осуществления медицинского баллона, как показано на Фиг. 2, оптический датчик 30 формы проходит медицинский баллон 41 в спиральной структуре в результате чего переход медицинского баллона 41 между спущенным состоянием (Фиг. 2А) и накачанным состоянием (Фиг. 2B) воспринимается оптическим датчиком 30 формы, как сжатие или расширение медицинского баллона изменяющее внешний стимул применяемый к оптическому датчику 30 формы. На практике оптический датчик 30 формы в сконструированной спиральной структуре может быть присоединен к медицинскому баллону 41 в максимально накачанном состоянии для объемного отображения, тем самым спиральная структура будет соответствовать сжатию с медицинским баллоном 41, когда медицинский баллон 41 спускают в какой-то степени от максимума накачанного состояния. Примеры спиральной структуры, включают в себя, но не ограничиваются, спираль структуры Архимеда 70, как показано на Фиг. 3 и спираль структуры Ферма 71, как показано на Фиг. 4.
Как впоследствии будет пояснено в данном документе в части, касающейся Фиг. 8, каждый медицинский баллон 41 будет работать в спущенном состоянии, тогда как устройство 20 отображения объема продвигается в анатомическом объеме с помощью устройства 64 доставки (Фиг. 1), и будет переведен в накаченное состояние в анатомическом объеме. Таким образом, оптический датчик 30 формы будет осуществлять спущенное детектирование каждого медицинского баллона 41 до того времени, пока медицинский баллон(ны) 41 будут накачаны в анатомическом объеме.
Также, например, в варианте осуществления медицинской корзины, как показано на Фиг. 5, медицинская корзина 42 включает в себя материал с памятью формы (например, нитиноловые проволоки), тем самым медицинская корзина 42 является переходной между деформированной удлиненной формой (Фиг. 5А) и естественной сферической формой (Фиг. 5B), и любой переход между удлиненной формой и сферической формой детектируется оптическим датчиком 30 формы как деформация или релаксация медицинского баллона изменяющие внешний входной сигнал применительно к оптическому датчику 30 формы. На практике оптический датчик 30 формы может быть присоединен к медицинской корзине 42 в естественной сферической форме для отображения объема, тем самым оптический датчик 30 формы будет локально удлинен, когда медицинская корзина 42 будет деформирована в некоторой степени от естественной сферической формы.
Как впоследствии будет пояснено в данном документе в части, касающейся Фиг. 8, каждая медицинская корзина 42 будет работать в деформированной удлиненной форме, тогда как устройство 20 отображения объема продвигается в анатомическом объеме с помощью устройства 64 доставки (Фиг. 1), и будет переведена в естественную сферическую форму в анатомическом объеме. Таким образом, оптический датчик 30 формы будет осуществлять удлиненное детектирование каждой медицинской корзины 42 до того времени, пока медицинская корзина(ны) 42 не возобновит свою естественную сферическую форму в анатомическом объеме.
Согласно следующему примеру в варианте осуществления медицинской трубки, как показано на Фиг. 5, медицинская трубка 43 включает в себя материал с памятью формы (например, нитиноловую трубку), тем самым медицинская трубка 43 является переходной между деформированной удлиненной формой (Фиг. 6A) и естественной спиральной формой (Фиг. 6), и любой переход между удлиненной формой и спиральной формой детектируется оптическим датчиком 30 формы как деформация или релаксация медицинского баллона изменяющие внешний входной сигнал применительно к оптическому датчику 30 формы. На практике, оптический датчик формы 30 может быть присоединен к медицинской трубке 43 в естественной спиральной форме для отображения объема, тем самым оптический датчик 30 формы будет локально удлинен, когда медицинская трубка 43 будет деформирована в некоторой степени от естественной спиральной формы.
Как впоследствии будет пояснено в данном документе в части, касающейся Фиг. 8, медицинская трубка 43 будет работать в деформированной удлиненной форме, тогда как устройство 20 отображения объема продвигается в анатомическом объеме с помощью устройства 64 доставки (Фиг. 1), и будет переведена в естественную спиральную форму в анатомическом объеме. Таким образом, оптический датчик 30 формы будет осуществлять удлиненное детектирование медицинской трубки 43 до того времени, пока медицинская трубка 43 не возобновит свою естественную спиральную форму в анатомическом объеме.
Для дальнейшего понимания устройства 20 отображения объема, в настоящем документе будет описан способ отображения объема настоящего изобретения, как представлено на структурной схеме 80, показанной на Фиг. 7. Описание структурной схемы 80 будет представлено в случае объемного отображения полых легких 11 пациента 10, как показано на Фиг. 1.
На Фиг. 1 и 7, стадия S81 структурной схемы 80 охватывает визуализацию полого органа 11 пациента 10 и планирование пути продвижения устройства 20 отображения объема к полому органу 11. Для визуализации полого органа 11, система 60 визуализации используется для осуществления известного метода медицинской визуализации (например, рентген, компьютерная томография, магнитно-резонансная томография, УЗИ, позитронно-эмиссионная томография и однофотонная эмиссионная компьютерная томография) для генерации изображений полого органа 11 в визуализирующей системе 61 координат.
Устройства 20 отображения объема к полому органу 11, планировщик 62 пути и/или хирургический навигатор 63 используется для осуществления известной методики планирования зависящей от типа устройства 64 доставки, используемого как средство для продвижения устройства 20 отображения объема к полому органу 11.
Например, в случае устройства 64 доставки являющегося катетером или эндоскопом, планировщик 62 пути может реализовать технологию преподанную международной заявкой WO 2007/022986 А2, Trovato и др., опубликованную 17 апреля 2007, и озаглавленную "3D Tool Path Planning, Simulation and Control System", которая может быть использована для генерации кинематически правильного пути для введения катетера или эндоскопа в сгенерированном изображении пациента 10.
Кроме того, в случае устройства 64 доставки являющегося катетером или эндоскопом, хирургический навигатор 63 может использовать электромагнитные или оптические системы наведения для отслеживания катетера или эндоскоп в сгенерированном изображении пациента 10. Примером такого хирургического навигатора является система PercuNav коммерчески предложенная Philips Medical, которая работает как системы глобального позиционирования ("GPS") для катетера и эндоскопов.
Также, например, в случае устройства 64 доставки являющегося вложенной канюлей, планировщик 62 пути может реализовать технологию преподанную международной заявкой WO 2008/032230 A1, Trovato и др., опубликованную 20 марта 2008, и озаглавленную "Active Cannula Configuration For Minimally Invasive Surgery", которая может быть использована для генерации кинематически правильной конфигурации для вложенной канюли в сгенерированном изображении пациента 10.
Стадия S82 структурной схемы 80 охватывает упорядоченное расположение и закрепление устройства 20 отображения объема в полом органе 11. На практике процедура для доставки устройства 20 отображения объема к полому органу 11 зависит от типа медицинского инструмента 40 и устройства 64 доставки. Два (2) примера теперь будут описаны в настоящем документе.
Согласно первому примеру, включающему типичную границу полого органа 11а, как показано на Фиг. 8, медицинский инструмент 40 включает в себя четыре (4) медицинских баллона 41, а устройством 64 доставки является катетер 64а. Медицинские баллоны 41 пространственно распределены вдоль дистального конца одиночного оптического датчика 30 формы и в сжатом спущенном состоянии в катетере 64а. В одном варианте осуществления оптический датчик 30 формы имеет одно или несколько оптических волокон, причем каждое оптическое волокно оптического датчика 30 формы может проходить через каналы в поверхности каждого медицинского баллона 41 (с или без стеновых элементов, таких как проволока или полимерная клубковая трубка, чтобы держать каналы открытыми) в спиральной структуре, что позволяет медицинским баллонам 41 расширяться, по-прежнему позволяя отслеживать форму гибкими, но относительно не растягивающимися, оптическими волокнами. Конечная часть каждого оптического волокна внутри структуры может представлять собой неподвижную точку, которая механически ограничена во всех направлениях внутри гибкой мембраны, в то время как другие точки вдоль оптических волокон позволяют свободно скользить с условиями граничного скольжения параллельно каналам/пазам в гибкой матрице, в которую оптическое волокно встраивается.
Кроме того, свободный отрезок каждого оптического волокна может быть прикреплен на каждом конце одного медицинского баллона 41 как продолжение медицинского баллона 41. Отрезок находится предпочтительно между длиной самого короткого пути и расстоянием по расширенной поверхности каждого медицинского баллона 41. Так как каждый медицинский баллон 41 будет сжат до некоторой степени другими медицинскими баллонами 41 полого органа 11а, то путь должен указать размер расширенного медицинского баллона 41.
Отметим, что оптический датчик 30 формы показан на Фиг. 8B как продольно перемещающийся через каждый медицинский баллон 41 для упрощения Фиг. 8B. Тем не менее, на практике, оптический датчик 30 формы, будучи расположенным в сферической структуре, показанной на Фиг. 3 и 4, будет обеспечивать оптимальное детектирование раздутия медицинских баллонов 41.
Катетер 64а может быть перемещен, чтобы доставить устройство отображения объема к конкретной точке входа полого органа 11а, как показано на Фиг. 8A, в результате чего устройство отображения объема продвигается в полый орган 11а в разработанной структуре, чтобы облегчить упорядоченное расположение устройства отображения объема в полом органе 11а, в частности, медицинские баллоны 41. Кроме того, катетер 64а может быть выдвинут в полый орган 11 в разработанной структуре, чтобы облегчить упорядоченное расположение устройства отображения объема в полом органе 11, в частности, медицинских баллонов 41.
В любом случае, поскольку медицинские баллоны 41 упорядоченно расположены внутри полого органа 11а, медицинские баллоны 41 накачивают, чтобы закрепить медицинские баллоны 41 у границы полого органа 11а. На практике, медицинские баллоны 41 могут автоматически срабатывать, в результате чего накачивание автоматически инициируется с помощью пневматического привода, который получает как ввод измерения от встроенных датчиков в медицинские баллоны 41 (например, температуры, напряжения, геометрии, влажности, pO2, pCO2, и т.д.), чтобы оценить критерии активации (например, глубина введения устройства). С другой стороны, накачивание медицинских баллонов 41 может быть рассчитано в программируемой или автоматизированной последовательности, чтобы достичь оптимального профиля фиксации у границы полого органа 11а. С триггера или таймера, медицинские баллоны 41 могут быть накачаны последовательно, тогда как каждый медицинский баллон 41 входит в полый орган 11а, или, как вариант, после введения двух (2) или более медицинских баллонов 41.
Также на практике система 60 визуализации может быть использована для упорядоченного расположения медицинских баллонов 41 в полом органе 11а и/или визуализации приемлемого закрепления медицинских баллонов 41 у границы полого органа 11а.
Специалистам в данной области техники будет понятно альтернативное использование медицинских корзин 42 (Фиг. 1) независимо от медицинских баллонов 41 для примера на Фиг. 8.
Для второго Согласно второму примеру, в котором фигурирует сердце 12, как показано на Фиг. 9, медицинский инструмент 40 является спиральной трубкой 43, и устройством доставки является канюлей 64b. Как показано на Фиг. 6, оптический датчик 30 формы с удлиненной формой проходит через спиральную трубку 43, которая проходит в удлиненной форме через канюлю 64b. В этом примере, канюля 64b проходит в продольном направлении, проходящем в правое предсердие сердца 12а, и устройство отображения объема 12 прикреплено к правому предсердию 12а с помощью спирали 44. Канюля 64b является после этого отведенной к началу правого предсердия 12а, как показано на Фиг. 9, спиральная трубка 43 и оптический датчик 30 формы, принявший естественную спиральную форму спиральной трубки 43, и спиральная трубка 43 закреплены у границы правого предсердия 12а.
Обратимся снова к Фиг. 7, стадия S83 структурной схемы 80 включает объемное отображение полого органа 11 в сформированном изображении. На практике, в связи с тем, что оптический датчик 30 формы может детектировать положение в 3D оптического датчика формы вдоль своей длины в визуализирующей системе 61 координат (Фиг. 1), распределение оптического датчика 30 формы в полом органе 11, конструкция точек фиксации оптического датчика 30 формы с помощью медицинского инструмента(ов) 40, и степень жесткости будут важными факторами отображения учитываемыми для точного отображения полого органа 11, тогда как медицинский инструмент(ы) 41 закреплены на полом органе 11.
Обратимся к Фиг. 1, контроллер 50 датчика формы и модуль 51 отображения объема используются для обработки кодированного оптического сигнала оптического датчика 30 формы, чтобы, тем самым, восстановить часть или всю форму оптического датчика 30 формы. Для целей настоящего изобретения, контроллер 50 датчика формы в широком смысле определяется в данном документе как любое устройство или система, структурно сконфигурированная для передачи света через оптический датчик 30 формы, чтобы получить кодированный оптический сигнал, сгенерированный последовательными внутренними отражениями передаваемого света с помощью массива оптических датчиков деформации. Например, контроллер 50 датчика формы включает в себя, но не ограничивается ими, расположенные в определенном порядке оптопару, широкополосный опорный отражатель и рефлектометр для измерения частотных характеристик, как известно из данной области техники, для передачи света через оптический датчик 30 формы и для приема кодированного оптического сигнала, сгенерированного последовательными внутренними отражениями передаваемого света с помощью массива оптических датчиков деформации.
Для целей настоящего изобретения, модуль отображения объема 52 включает в себя реконструктор формы, который является в широком понимании любым предметом или устройством конструктивно настроенным для обработки кодированного оптического сигнала, чтобы частично или полностью восстановить форму оптического датчика 30 формы. Например, реконструктор формы включает, но не ограничивается ими, реконструктивный обработчик установленной как программное обеспечение и/или встроенная программа на любом типе компьютера (например, терминал 53 показанный на Фиг. 1) для реализации известного метода восстановления формы. В частности, известный метод восстановления формы для соотнесения кодированного оптического сигнала в измерениях деформации/изгиба, который интегрирован в форму оптического датчика 30 формы.
Модуль отображения объема 52 дополнительно включает в себя отображатель изображения, который в широком понимании любым предметом или устройством конструктивно настроенным для обработки восстановленной формы оптического датчика формы 21 и, если применимо, физической геометрии медицинского инструмента(ов) 40 в структурной конфигурации отображения, чтобы обеспечивать 3D форму границы полого органа 11 в визуализирующей системе 61 координат.
Например, в случае Фиг. 8B, точки 90-97 представляют край полого органа 11 с помощью закрепления медицинских инструментов 41 и, следовательно, различные точки детектирования оптического датчика 30 формы вплотную к полому органу 12. В свете вышеупомянутых факторов отображения, отображение объема может осуществляться соединениями между точками 90-97 в виде прямых линий и/или дуг (например, кривые Безье). Как будет понятно специалистам в данной области техники, увеличение точек 90-97 приводит к более точному объемному отображению анатомического объема отображателем изображения.
По завершении стадии S83, объемное отображение может быть использовано для разнообразных диагностических и/или терапевтических целей. Например, граница, отображенная по форме, может быть использована для определения фиксированного анатомического объема/функции для регистрации/объединения комбинированных данных, в результате чего пространству устройства, отслеживающего форму, и пространствам визуализации/мониторинга позволяется наложиться для расширения управления устройства, отслеживающего форму, по отношению к требуемой цели.
Специалисту в данной области техники будет понятно, как применить принципы устройства отображения объема настоящего изобретения к любому типу медицинской процедуры.
Специалисту в данной области техники будет также понятно, преимущества устройства отображения объема настоящего изобретения.
Хотя различные варианты осуществления настоящего изобретения были проиллюстрированы и описаны, специалистам в данной области техники должно быть понятно, что варианты осуществления настоящего изобретения, описанные здесь, являются иллюстративными, и различные изменения и модификации могут быть сделаны, и эквиваленты могут быть замещены для элементов, без отхода от истинного содержания настоящего изобретения. Кроме того, многие модификации могут быть сделаны для адаптации техник настоящего изобретения, не отступая от его основного содержания. Таким образом, предполагается, что настоящее изобретение не ограничивается конкретными вариантами осуществления, раскрытыми в качестве наилучшего способа для осуществления настоящего изобретения, но что настоящее изобретение включает в себя все варианты осуществления, попадающие в объем прилагаемой формулы изобретения.
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия
Система и способ картографирования для медицинских процедур
Интервенционная мр-томография с компенсацией движения
Визуализация для навигационного указания
Интеграция оптоволоконного определения формы в интервенционную среду
Гибкий кабель со встроенными датчиками для динамического отслеживания инструмента
Голографические пользовательские интерфейсы для медицинских процедур
Автоматическое онлайновое совмещение между роботом и изображениями
Удаление артефактов от генератора электромагнитного поля из трехмерного снимка
Информация о вводе и выводе медицинского устройства с использованием распределенного измерения температуры оптическим волокном
Хранение и поиск информации, характерной для конкретного устройства измерения формы

