Результат интеллектуальной деятельности: СПОСОБ КАЛИБРОВКИ СИСТЕМЫ НАБЛЮДЕНИЯ ДОРОГИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способу калибровки системы наблюдения дороги. Упомянутая система наблюдения дороги выполнена с возможностью контроля зоны наблюдения дороги и включает в себя множество средств наблюдения автомобилей. Упомянутое множество средств наблюдения автомобилей выполнено с возможностью измерения положения автомобиля, проходящего через упомянутую зону наблюдения, управляется электронным блоком управления (ECU) и синхронизируется с сигналом глобального времени.
Способ дополнительно относится к устройству для осуществления способа.
УРОВЕНЬ ТЕХНИКИ
Системы наблюдения дороги известны. Система наблюдения дороги содержит множество средств наблюдения одного автомобиля. Для правильного функционирования средству наблюдения автомобилей необходима калибровка. Ранее это осуществлялось посредством ручного размещения калибровочных меток на дорожной поверхности, чтобы по ним калибровалось средство наблюдения автомобилей. Затем средства наблюдения автомобилей вручную регулируются посредством физического изменения обслуживающим персоналом направления и/или положения средств наблюдения автомобилей таким образом, что достигается необходимая точность. Для калибровки требуется, чтобы дорога, на которой расположена система наблюдения дороги, была закрыта в тех случаях, когда на дорожной поверхности размещены калибровочные метки, и, возможно, также для обеспечения доступа к системе наблюдения дороги и обеспечения безопасности занимающегося калибровкой персонала. Если дорога закрывается в условиях движения большого количества транспорта, это может привести к заторам, либо калибровка может выполняться только в ночное время, когда движение является неинтенсивным, приводя к дискомфортным условиям работы занимающегося калибровкой персонала.
Таким образом, представляется совершенно очевидным, что существует необходимость в усовершенствованном способе калибровки системы наблюдения дороги с помощью множества средств наблюдения автомобилей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к способу калибровки системы наблюдения дороги. Упомянутая система наблюдения дороги выполнена с возможностью контроля зоны наблюдения дороги и включает в себя множество средств наблюдения автомобилей. Упомянутое множество средств наблюдения автомобилей выполнено с возможностью измерения положения автомобиля, проходящего через упомянутую зону наблюдения, управляется посредством ECU и синхронизируется с сигналом глобального времени. С целью калибровки данный способ включает в себя упомянутое множество средств наблюдения автомобилей таким образом, что определение положения упомянутого множества средств наблюдения автомобилей является одинаковым и состоит в пропускании калибровочного автомобиля через упомянутую зону наблюдения. Упомянутый калибровочный автомобиль калибровки снабжен множеством заданных калибровочных меток, причем каждому из упомянутого множества средств наблюдения автомобилей выделяется по меньшей мере одна метка. Упомянутые калибровочные метки предусматриваются в заданных положениях на упомянутом калибровочном автомобиле. Во время прохождения упомянутого калибровочного автомобиля через упомянутую зону наблюдения каждое средство наблюдения измеряет положения своих назначенных калибровочных меток, причем упомянутое измерение выполняется в заранее заданное время. Данный способ также включает в себя выбор базового средства наблюдения автомобилей, которое задает базовую систему координат, сравнение упомянутого измеренного положения калибровочной метки, назначенной средству наблюдения автомобилей, с положением калибровочной метки, назначенной базовому средству наблюдения автомобилей, и калибровку упомянутого множества средств наблюдения автомобилей таким образом, что положение соответствующих калибровочных меток в упомянутой базовой системе координат соответствует ожидаемому положению в упомянутой базовой системе координат.
Упомянутое множество средств наблюдения автомобилей может включать в себя устройство видеослежения и микроволновый приемопередатчик, камеру регистрации идентификационной информации, фото датчик, лазер или иное воспринимающее средство, которое может использоваться для измерений положения.
Одно из преимуществ указанного способа в соответствии с изобретением состоит в том, что средство наблюдения автомобилей может быть установлено на системе наблюдения дороги с начальным уровнем точности измерений. Конечный уровень точности достигается путем калибровки средства наблюдения автомобилей в соответствии со способом изобретения. Другие преимущества способа изобретения состоят в том, что калибровка и повторная калибровка системы наблюдения дороги могут осуществляться без прерывания транспортного потока.
Благодаря тому, что средство наблюдения автомобилей синхронизируется с сигналом глобального времени - «глобальный» в данном случае означает совместно используемый всеми средствами наблюдения автомобилей в системе наблюдения дороги - все средства наблюдения автомобилей могут калиброваться одновременно. Благодаря использованию калибровочного автомобиля, проходящего через зону наблюдения системы наблюдения дороги, опорные метки на дорожной поверхности в зоне наблюдения больше не нужны. Это означает, что необходимость в закрытии дороги и наличии бригады технического обслуживания, физически изменяющей средства наблюдения автомобилей для их калибровки, исключается. Это обеспечивает более простое выполнение калибровки в любое время, когда это требуется, за счет прохождения калибровочного автомобиля через зону наблюдения системы наблюдения дороги. Калибровка, например, может выполняться один или несколько раз в месяц с целью обеспечения для системы наблюдения дороги однородного качества.
Одно из средств наблюдения автомобилей используется в качестве базового средства наблюдения автомобилей, по которому калибруются все остальные средства наблюдения автомобилей. Базовое средство наблюдения автомобилей задает базовую систему координат. Предпочтительно это - средство наблюдения автомобилей с наивысшей точностью. Результаты измерений калибровочных меток с базового средства наблюдения автомобилей становятся базовыми положениями. Эти базовые положения сравниваются с положениями, измеренными остальными средствами наблюдения автомобилей. Базовые положения могут использоваться для вычисления базовых расстояний и, следовательно, положений относительно калибровочных меток на калибровочном автомобиле, которые не соответствуют базовым положениям, поскольку расстояния между всеми калибровочными метками известны.
Все положения калибровочных меток на калибровочном автомобиле измеряются в один и тот же заданный момент времени или моменты времени, регулируемые с помощью сигнала глобального времени. В этот заданный момент времени или моменты времени положения калибровочных меток в базовой системе координат известны.
Упомянутое множество средств наблюдения автомобилей может, например, включать в себя систему видеослежения и микроволновый приемопередатчик. Система видеослежения непрерывно отслеживает автомобили и регистрирует прохождения через систему наблюдения дороги. Система видеослежения может использоваться в качестве базовой для калибровки остальных средств наблюдения автомобилей ввиду ее точности как по временной разрешающей способности, так и по пространственной. Микроволновый приемопередатчик связывается, например, с транспондером на автомобиле, проходящем через систему наблюдения дороги, и используется, например, для определения направления, в котором автомобиль проходит через систему наблюдения дороги.
Упомянутое множество средств наблюдения автомобилей может дополнительно включать в себя камеру регистрации идентификационной информации. Камера регистрации идентификационной информации используется для регистрации номерного знака или иных идентифицирующих меток автомобиля, например, чтобы иметь возможность передачи информации в систему обеспечения правопорядка или систему взимания сборов.
Камера регистрации идентификационной информации выполняет идентификацию в некотором конкретном положении в зоне наблюдения дороги, например, в точке фокусировки камеры регистрации идентификационной информации. Это конкретное положение соответствует конкретному моменту времени в соответствии с сигналом глобального времени, который может не соответствовать заданному моменту времени, в который осуществляется калибровка для остальных средств наблюдения автомобилей. Чтобы выполнять калибровку для камеры регистрации идентификационной информации, положения калибровочных меток, измеряемые базовым средством наблюдения автомобилей, интерполируются к положению, которое соответствует положению, измеряемому в то же заданное время, что и для камеры регистрации идентификационной информации.
По меньшей мере одна калибровочная метка может содержать заданный шаблон, такое как клетчатый шаблон, полосатый шаблон, спиральный шаблон или круговой шаблон. Они используются для средств наблюдения автомобилей, которые обнаруживают оптические шаблоны. Заданный шаблон может дополнительно включать в себя известный номерной знак или известный текст, расположенный на калибровочном автомобиле. Он может использоваться для камеры регистрации идентификационной информации. Калибровочная метка может также содержать известный транспондер, используемый для микроволнового приемопередатчика.
Упомянутый способ начинается с того, что упомянутая система наблюдения дороги распознает упомянутую по меньшей мере одну из упомянутых калибровочных меток. Это может осуществляться, когда средство наблюдения автомобилей, в зону наблюдения которого сначала входит калибровочный автомобиль, регистрирует известную калибровочную метку. Известная калибровочная метка, как описано выше, может представлять собой визуальную метку и/или метку транспондера. При использовании заданного изображения при калибровке может вноситься поправка на масштабирование, искажение и/или иные аберрации. Чтобы правильно определить положение и поворот базовой системы координат, необходимо определить положение по меньшей мере трех калибровочных меток для каждого измерения положения автомобиля.
Упомянутые измерения положения могут выполняться множество раз во время прохождения упомянутого калибровочного автомобиля. Чтобы достичь более высокой степени точности, во время прохождения калибровочного автомобиля может выполняться более одного измерения положения. Затем калибровка может проводиться путем выбора одного из следующих калибровочных значений: выбора измерения положения с наименьшим отклонением в качестве базового, выбора измерения положения с наибольшим отклонением в качестве базового, выбора среднего отклонения в качестве базового, вычисления средней величины отклонения всех измерений положения и/или какого-либо иного калибровочного значения с использованием одного или более из множества измерений положения.
Упомянутая калибровка может состоять в том, что когда определяется отклонение между измеренным положением, измеряемым различными средствами наблюдения автомобилей, и ожидаемым положением в базовой системе координат, в алгоритм, регулирующий измеренное положение, вносится поправка для согласования с ожидаемым положением. Это означает, что средство наблюдения автомобилей, которое измеряет положение, не соответствующее ожидаемому положению, будет калиброваться с помощью поправки, которая суммируется с измеренным положением упомянутого средства наблюдения автомобилей и/или вычитается из него.
Система может выдавать оповещение о техническом обслуживании, если любое из множества средств наблюдения автомобилей выходит из строя. Оповещение о техническом обслуживании может также выдаваться, если отклонение между измеренным положением упомянутых калибровочных меток и ожидаемым положением упомянутых калибровочных меток в базовой системе координат превышает пороговое значение. Оповещение о техническом обслуживании может при этом указывать, что отклонение слишком велико, чтобы выполнять калибровку в соответствии с изобретением, и что требуется ручная калибровка.
Изобретение дополнительно относится к системе наблюдения дороги для осуществления вышеописанного способа. Система наблюдения дороги выполнена с возможностью контроля зоны наблюдения дороги. Система наблюдения дороги содержит множество средств наблюдения автомобилей, причем упомянутое множество средств наблюдения автомобилей синхронизируется с помощью сигнала глобального времени.
Устройство в соответствии с изобретением выполнено с возможностью осуществления вышеописанного способа.
Система наблюдения дороги может, например, представлять собой систему взимания автодорожных сборов, систему мониторинга транспортных потоков, используемую для измерения плотности транспортных потоков или заторов, или систему наблюдения, используемую правоохранительными органами или в целях обеспечения безопасности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 схематически изображен вид в перспективе системы наблюдения дороги в соответствии с изобретением.
На фиг. 2 схематически изображен вид сбоку системы наблюдения дороги в соответствии с изобретением.
На фиг. 3а схематически изображен вид базовой системы, используемой для способа в соответствии с изобретением.
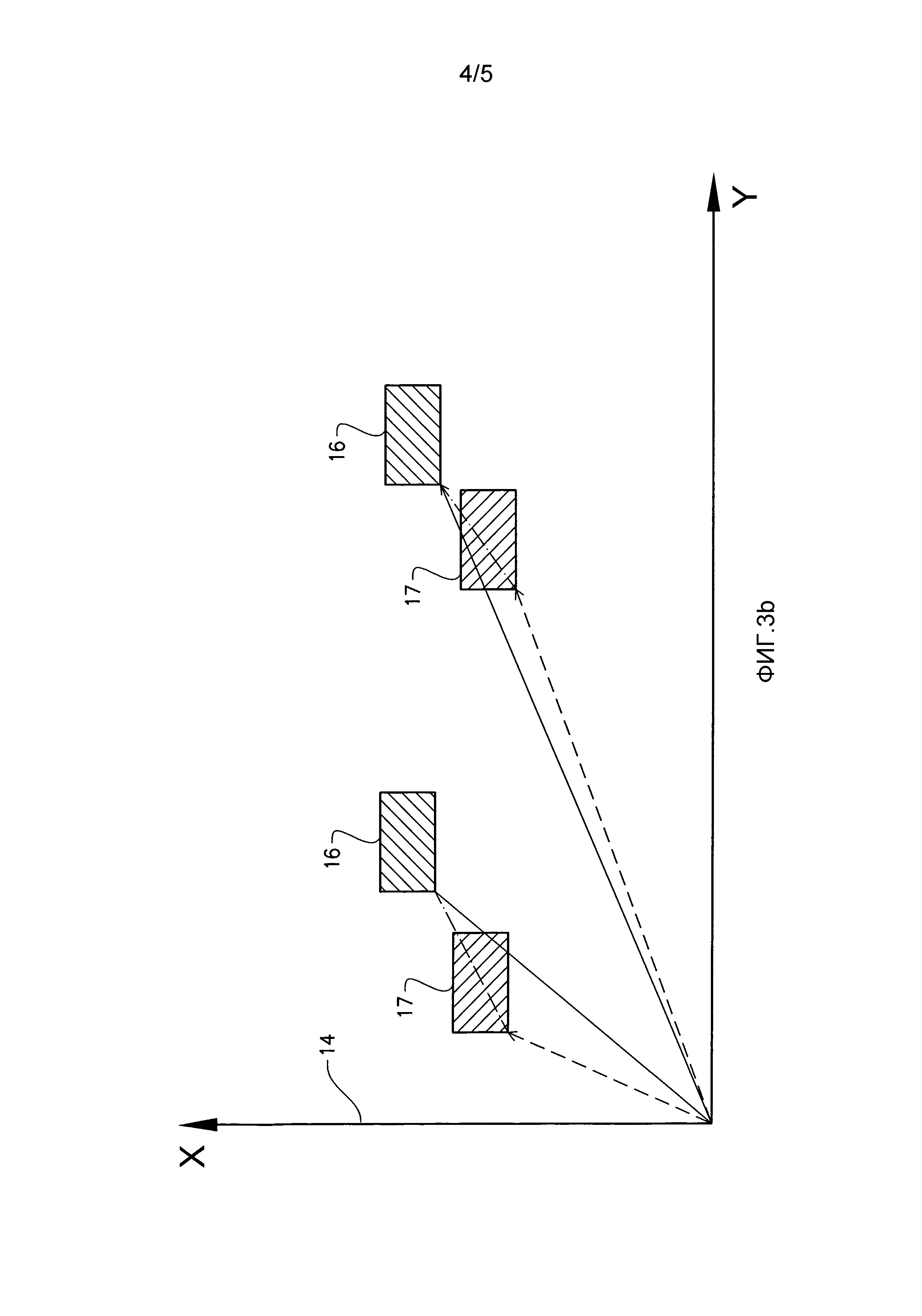
На фиг. 3b схематически изображен пример калибровки системы в соответствии с изобретением.
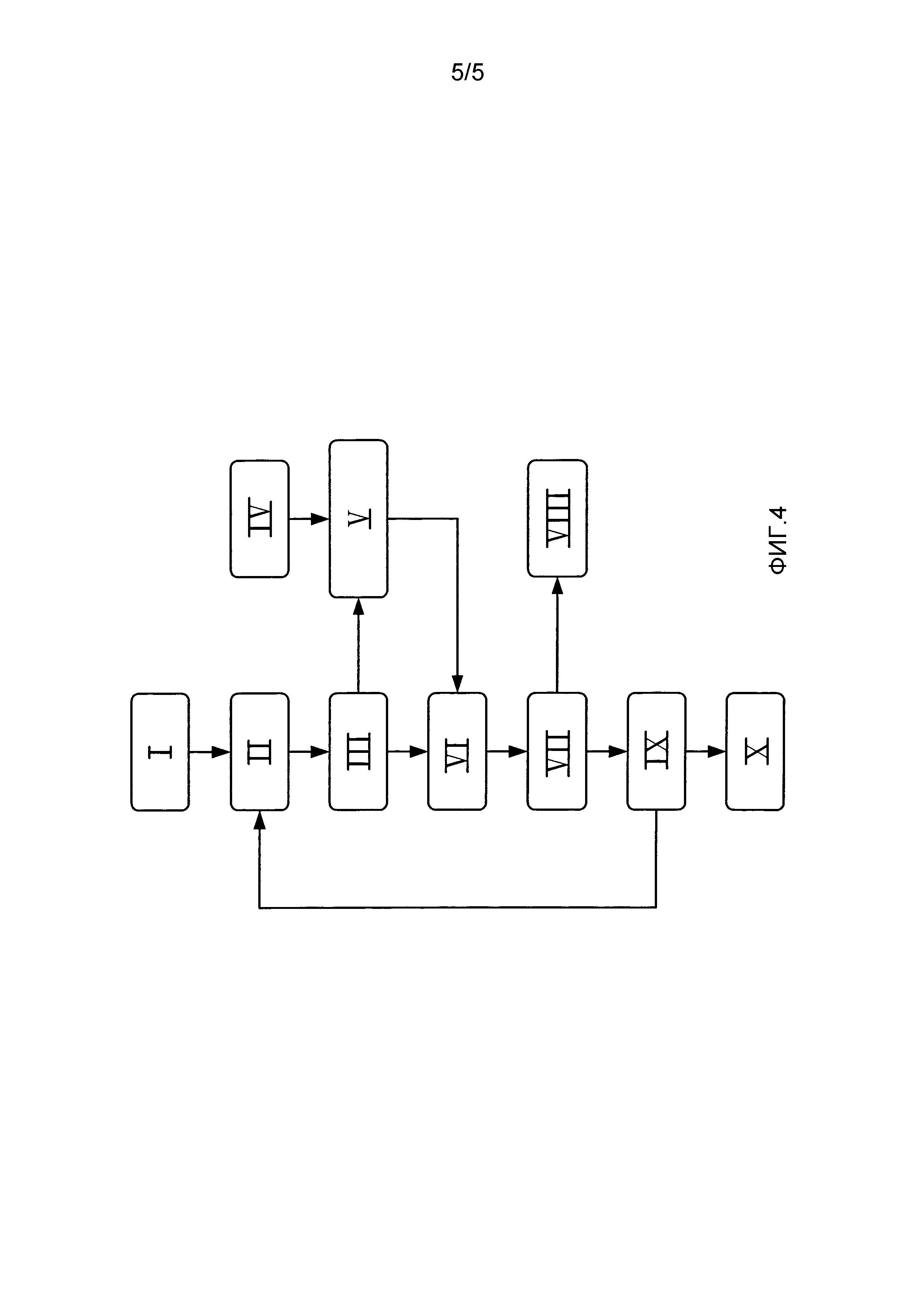
На фиг. 4 схематически изображена блок-схема процесса калибровки в соответствии с изобретением.
ПОДРОБНОЕ ОПИСАНИЕ
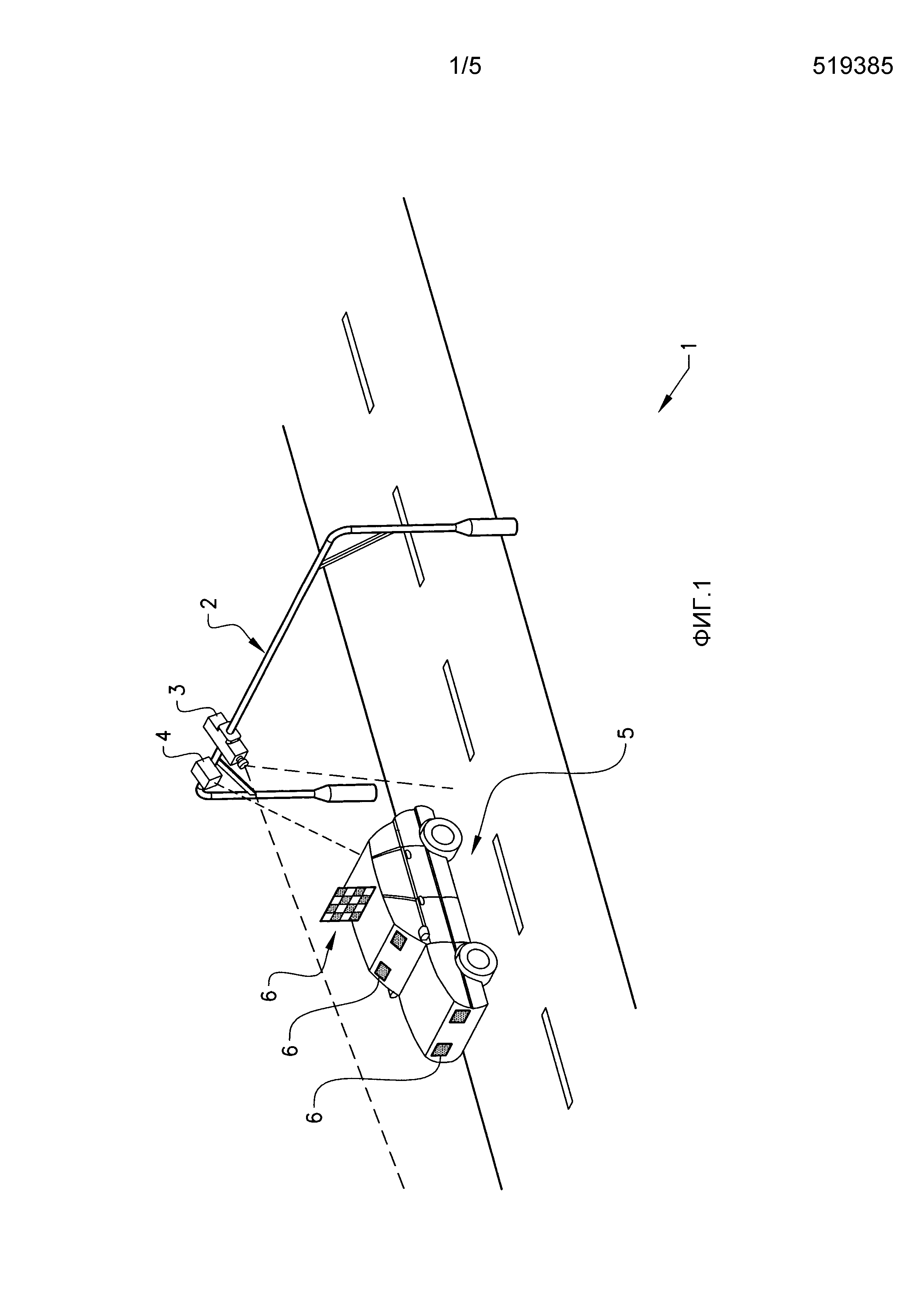
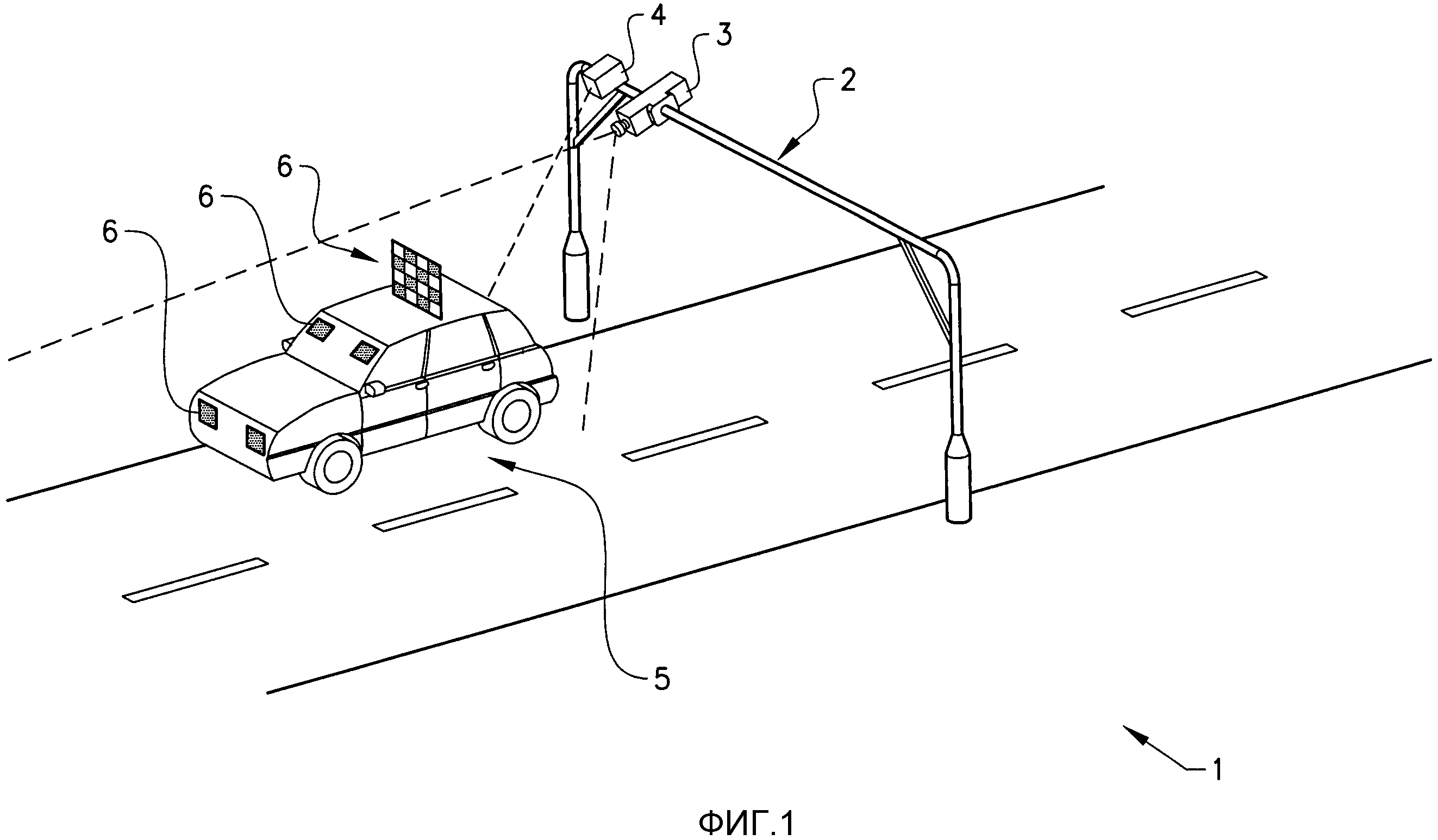
На фиг. 1 схематически изображен вид в перспективе системы 1 наблюдения дороги в соответствии с изобретением. Система 1 наблюдения дороги содержит опорную раму 2, на которой установлены первое средство 3 наблюдения автомобилей и второе средство 4 наблюдения автомобилей. Вместо опорной рамы 2 существует ряд других возможных альтернативных вариантов установки. Средство наблюдения автомобилей может устанавливаться, например, на столбах, на эстакаде, на въезде в туннель. Система 1 наблюдения дороги дополнительно содержит электронный блок управления (ECU), который управляет функционированием системы 1 наблюдения дороги. ECU может представлять собой Ethernet-соединение с сервером, который хранит данные с системы 1 наблюдения дороги и который может устанавливать глобальный сигнал времени на все средства наблюдения автомобилей.
На фиг. 1 также изображен калибровочный автомобиль 5, на котором размещены заданные калибровочные метки 6. Первое средство 3 наблюдения автомобилей выполнено с возможностью измерения положения своей назначенной калибровочной метки в заранее заданный момент t1. В тот же момент t1 второе средство 4 наблюдения автомобилей выполнено с возможностью измерения положения своей назначенной калибровочной метки. Два средства наблюдения автомобилей могут иметь одну и ту же назначенную им калибровочную метку. Одному средству наблюдения автомобилей может быть назначено более одной калибровочной метки при условии, что средства наблюдения автомобилей используют одинаковый метод измерений, т.е. оптические калибровочные метки 6 для камер или микроволновые транспондеры для микроволнового приемопередатчика. Наличие калибровочных меток 6 для различных средств наблюдения автомобилей, помещенных в одном и том же положении, упрощает выполнение сравнения между калибровочными метками при осуществлении способа. На фиг. 1 изображена одна стоячая калибровочная метка 6. Разумеется, можно использовать калибровочную метку 6, размещенную плашмя на калибровочном автомобиле 5.
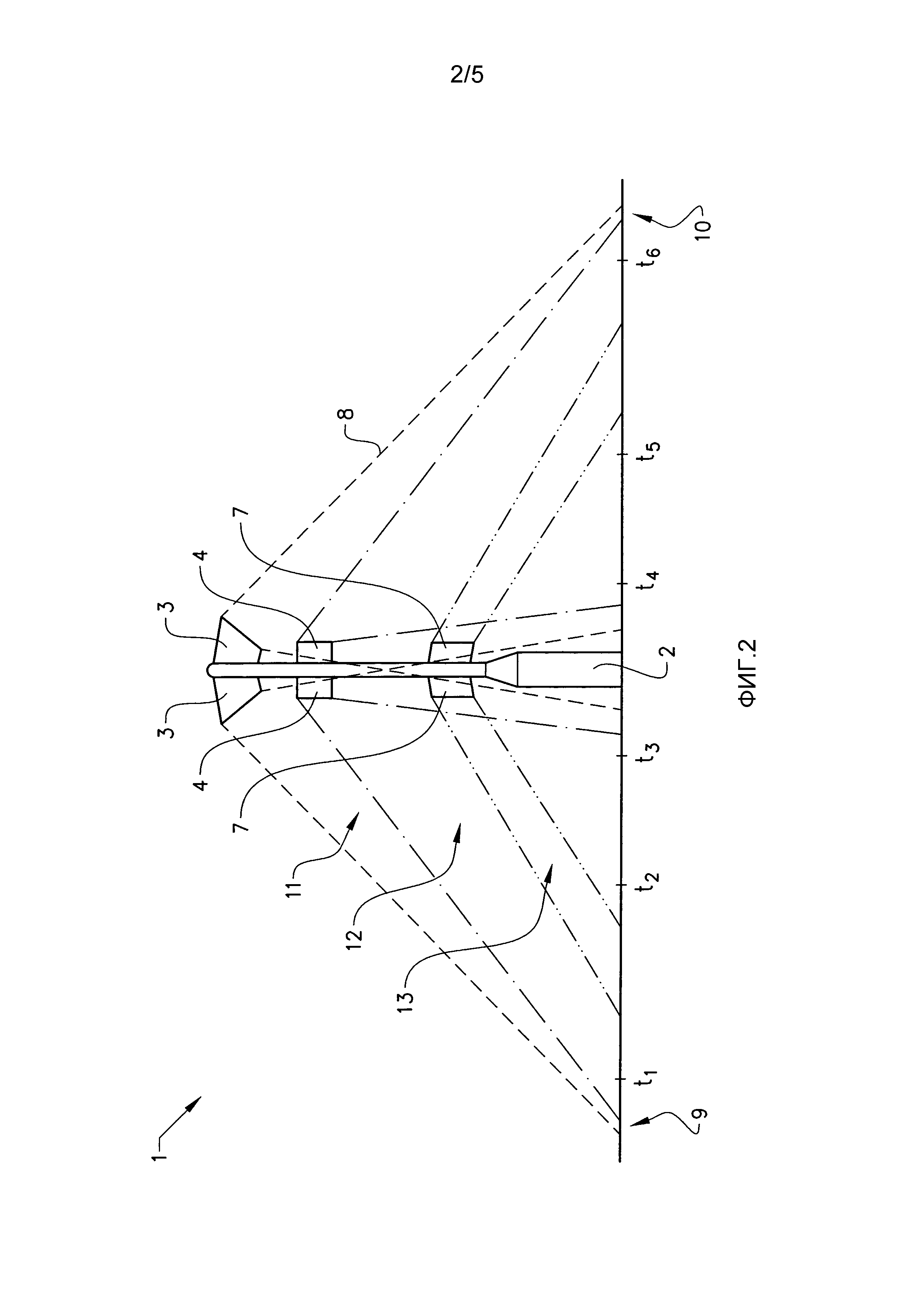
На фиг. 2 схематически изображен вид сбоку системы 1 наблюдения дороги в соответствии с изобретением. Система 1 наблюдения дороги на фиг. 2 помимо первого средства 3 наблюдения автомобилей и второго средства 4 наблюдения автомобилей содержит также камеру 7 регистрации идентификационной информации, которая, например, может использоваться для регистрации номерного знака автомобиля, проходящего через систему 1 наблюдения дороги. Каждое средство наблюдения автомобилей на фиг. 2 выполнено в виде средства наблюдения автомобилей с передним обзором и средства наблюдения автомобилей с задним обзором, имеющих одинаковые характеристики. Это носит чисто иллюстративный характер, и возможно наличие различных средства наблюдения автомобилей с передним обзором и средства наблюдения автомобилей с задним обзором. Протяженность зоны 8 наблюдения системы наблюдения автомобилей определяется от первой точки 9 обнаружения автомобиля системой наблюдения автомобилей до последней точки 10 обнаружения системы наблюдения автомобилей. Первое средство наблюдения имеет первую зону 11 наблюдения, второе средство наблюдения имеет вторую зону 12 наблюдения, а камера 7 регистрации идентификационной информации содержит третью зону 13 наблюдения. На фиг. 2 первая точка 9 обнаружения системы наблюдения автомобилей является началом первой зоны 11 наблюдения первого средства 3 наблюдения автомобилей. Последняя точка 10 обнаружения является концом первого наблюдения первого средства 3 наблюдения автомобилей.
Далее со ссылкой на фиг. 2 описывается способ согласно изобретению. Когда система 1 наблюдения дороги обнаруживает калибровочный автомобиль 5 (на фиг. 2 не показан), входящий в зону 8 наблюдения в первой точке 9 обнаружения, путем обнаружения заданной калибровочной метки на калибровочном автомобиле 5, система 1 наблюдения дороги запускает способ калибровки. Первое измерение положения осуществляется в положении, соответствующем моменту t1, показанному на фиг. 2. В этом положении по меньшей мере первое средство 3 наблюдения автомобилей и второе средство 4 наблюдения автомобилей измеряют положение своих назначенных заданных калибровочных меток 6. Одно из измерений положения первого средства 3 наблюдения автомобилей или второго средства 4 наблюдения автомобилей используется для установки базовой системы координат (не показана), по которой калибруются все остальные измерения положения. Эта базовая система координат предпочтительно устанавливается средством наблюдения автомобилей с наивысшим пространственным и временным разрешением.
При необходимости для улучшения калибровки измерения положения могут осуществляться в положении, соответствующем моментам t2, t3, t4, t5 и t6.
На фиг. 2 у камеры 7 регистрации идентификационной информации третья зона 13 наблюдения не перекрывает положение средства наблюдения автомобилей, которое используется для установки базовой системы координат в положениях, соответствующих любому из моментов t1-t6. Это означает, что для калибровки камеры 7 регистрации идентификационной информации измерения базового положения заданной калибровочной метки, назначенной камере 7 регистрации идентификационной информации, например, в моменты t1 и t2, должны интерполироваться на момент t1’, чтобы калибровка камеры 7 регистрации идентификационной информации выполнялась правильно. Если опорная рама 2 содержит средства наблюдения автомобилей, обращенные в различные стороны, калибровка выполняется по меньшей мере однократно для каждой стороны опорной рамы 2.
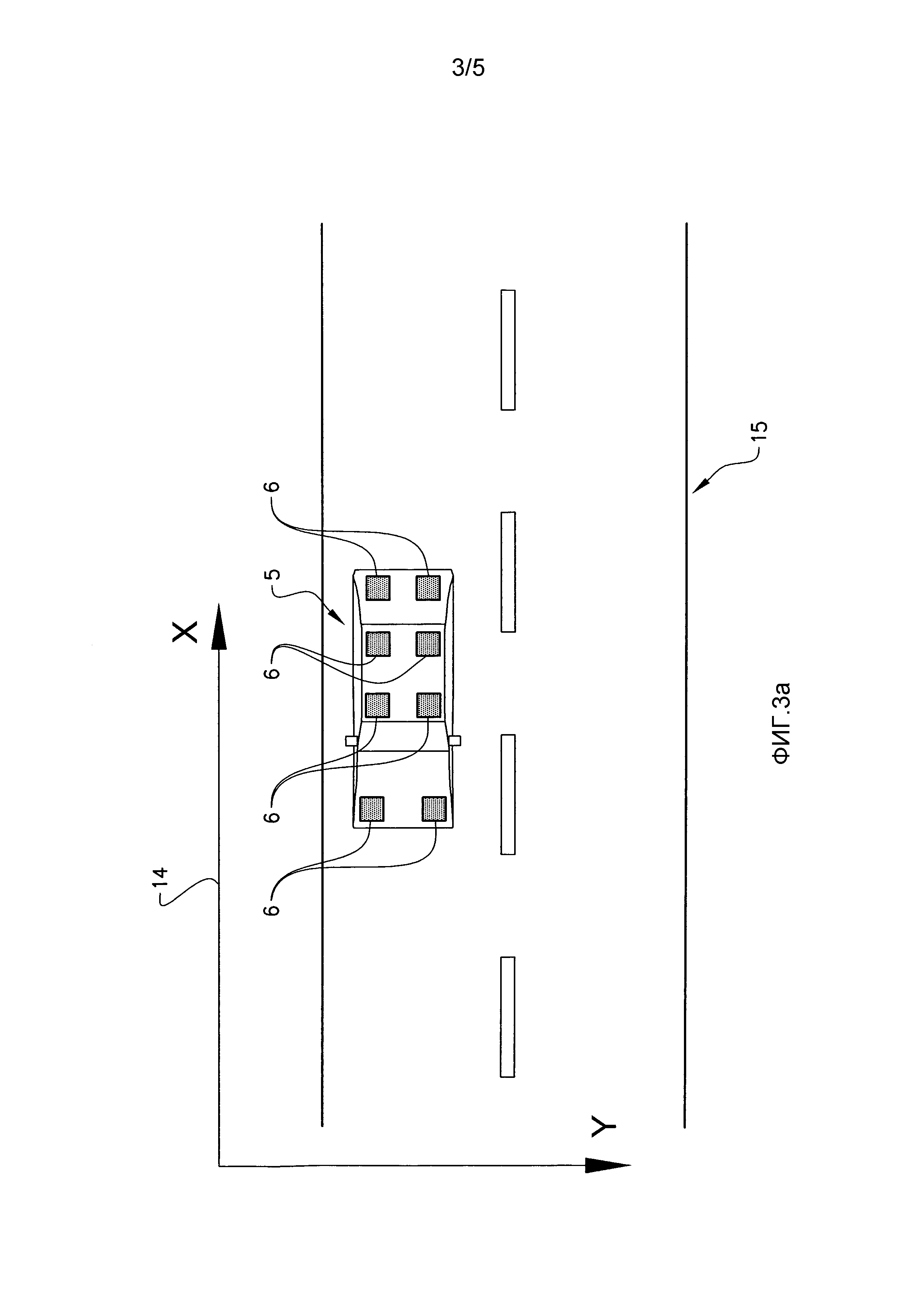
На фиг. 3а схематически изображен вид базовой системы 14 координат, используемой для способа в соответствии с изобретением. Базовая система 14 координат в этом примере устанавливается с помощью устройства видеослежения. На фиг. 3а дополнительно изображен калибровочный автомобиль 5 на дороге 15, как видно со средства наблюдения автомобилей, используемого для базовой системы 14 координат. Калибровочный автомобиль 5 содержит ряд калибровочных меток 6, все расстояния между которыми известны. ECU системы 1 наблюдения дороги выполнен с возможностью установки базовой системы 14 координат, причем положение каждой заданной калибровочной метки относительно выбранного начала координат известно. Это означает, что положения, а также расстояния между калибровочными метками 6 в базовой системе 14 координат, могут использоваться для способа калибровки. На фиг. 3а базовая система 14 координат является двумерной системой координат. Разумеется, данный способ может быть распространен на трехмерные системы координат.
На фиг. 3b схематически изображен пример калибровки. На фиг. 3b изображены два набора калибровочных меток 16, 17, расположенные в двух положениях на калибровочном автомобиле 5. Наборы калибровочных меток 16, 17 измеряются двумя средствами наблюдения автомобилей. Два набора калибровочных меток используются для иллюстрации принципа данного способа. Данный способ может быть распространен на любое число калибровочных меток или наборов калибровочных меток. Первый набор калибровочных меток 16 соответствует базовым положениям, по которым калибруются все остальные калибровочные метки. Это положение определяется с помощью устройства видеослежения, которое устанавливает базовую систему 14 координат. В качестве примера изображены положения второго набора калибровочных меток 17, измеренные вторым средством наблюдения автомобилей. Первый набор калибровочных меток 16 в данном случае представляет собой визуальные калибровочные метки, выделяемые устройством видеослежения. Второй набор калибровочных меток 17 может, например, представлять собой транспондеры, расположенные в том же положении, что и визуальные калибровочные метки, выделяемые микроволновым приемопередатчиком. Это означает, что базовые положения первого набора калибровочных меток 16 должны соответствовать измеренным положениям второго набора калибровочных меток 17. Поскольку базовая система 14 координат известна, измеренные положения без труда вычисляются для сравнения с базовыми положениями.
На фиг. 3b второй набор калибровочных меток 17 изображен расположенным на некотором расстоянии от первого набора калибровочных меток 16. При этом имеется погрешность в измеренном положении относительно микроволнового приемопередатчика, которую необходимо корректировать при калибровке. ECU, зная базовое положение первого набора калибровочных меток 16 и второго набора калибровочных меток 17, может посредством этого калибровать положение второго набора калибровочных меток 17 таким образом, что положения первого набора калибровочных меток 16 и второго набора калибровочных меток 17 в базовой системе 14 координат согласуются. На фиг. 3b все погрешности в положении второго набора калибровочных меток 17 одинаковы.
На фиг. 4 схематически изображена блок-схема процесса калибровки в соответствии с изобретением. На этапе I калибровочный автомобиль 5 входит в зону 8 наблюдения и обнаруживается системой 1 наблюдения дороги в первой точке 9 обнаружения. На этапе II первое средство 3 наблюдения автомобилей и второе средство 4 наблюдения автомобилей измеряют положения своих назначенных калибровочных меток по меньшей мере в заданный момент t1. На этапе III измерения первого средства 3 наблюдения автомобилей составляют основу для базовой системы 14 координат. На этапе IV камера 7 регистрации идентификационной информации измеряет положение своих назначенных калибровочных меток в момент t1’. На этапе V базовые положения, измеренные первым средством 3 наблюдения автомобилей, интерполируются к обновленному положению, соответствующему положению, измеренному в тот же заданный момент t1’, что и для камеры 7 регистрации идентификационной информации. Это показано стрелкой между этапом III и этапом V. На этапе VI измеренные положения упомянутых калибровочных меток сравниваются с базовыми положениями упомянутых калибровочных меток. На этапе VII вычисляются поправки для каждой калибровочной метки, измеренной вторым средством 4 наблюдения автомобилей и камерой 7 регистрации идентификационной информации, чтобы измеренные положения их назначенных калибровочных меток соответствовали базовому положению их назначенных калибровочных меток. На этапе VIII система 1 наблюдения автомобилей выдает оповещение о техническом обслуживании, если любое из множества средств наблюдения автомобилей считается отказавшим или если отклонение между измеренным положением упомянутых калибровочных меток и ожидаемым положением упомянутых калибровочных меток в базовой системе координат превышает пороговое значение. На этапе IX упомянутое множество средств наблюдения автомобилей калибруется таким образом, что измеренные положения калибровочных меток соответствуют базовым положениям упомянутых калибровочных меток за счет внесения поправок в каждую калибровочную метку, измеренную вторым средством 4 наблюдения автомобилей и камерой 7 регистрации идентификационной информации. После этапа IX система наблюдения автомобилей может установить, что необходимо выполнить новое измерение, и повторно запускает способ на этапе II. Это может быть осуществлено в то время, когда калибровочный автомобиль все еще находится в зоне наблюдения. После этапа IX система может установить, что калибровка завершена, и вернуться в нормальный рабочий режим на этапе X.
Как упоминалось выше, этот процесс может повторяться заданное число раз уже на втором этапе 19 и/или для средств наблюдения автомобилей, обращенных в противоположные стороны на системе наблюдения автомобилей.
Ссылочные позиции, упоминаемые в формуле изобретения, не должны рассматриваться как ограничивающие объем объекта изобретения, защищаемого формулой изобретения, поскольку их единственное назначение состоит в облегчении понимания формулы изобретения.
Как станет ясно, изобретение допускает изменения в различных безусловных отношениях в пределах объема прилагаемой формулы изобретения. В связи с этим чертежи и описания должны рассматриваться по своему характеру как пояснительные, а не как ограничительные.
Бортовой модуль с управлением питанием
Устройство для систем сбора дорожных пошлин или телематических систем
Система наблюдения за дорожным движением
Двойной стереоскопический датчик
Способ и блок обработки для управления системой наблюдения за дорожным движением

