Результат интеллектуальной деятельности: АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПОЛОЖЕНИЯ ЗАТВОРА ПРИЕМНОГО БУНКЕРА ДЛЯ ГРУЗОВИКОВ АСФАЛЬТОПЕРЕГРУЖАТЕЛЯ
Вид РИД
Изобретение
Перекрестная ссылка на родственную заявку
По настоящей заявке испрашивается приоритет на основании предварительной заявки на патент США №61/916,406, поданной 16 декабря 2013 года.
Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к асфальтоперегружателю, предназначенному для перегрузки асфальта с развозного грузового автомобиля на асфальтоукладчик. В частности, настоящее изобретение относится к механизму регулирования потребляемой мощности разгрузочного конвейера асфальтоперегружателя путем регулирования скорости подачи материала с развозного грузового автомобиля в приемный бункер асфальтоперегружателя.
Предпосылки к созданию настоящего изобретения
Обычно работы по асфальтированию автомобильных дорог выполняют в целом с использованием асфальтоукладчика и нескольких развозных грузовых автомобилей, подвозящих асфальт с предприятия по производству асфальта к асфальтоукладчику. Асфальтоукладчик обычно представляет собой самоходный комплекс на колесном или на гусеничном ходу. В передней части асфальтоукладчика расположен бункер для приема асфальта из грузовых автомобилей, в то время как в задней части машины расположен разравнивающий брус для формирования слоя асфальта. Обычно конвейерная система, состоящая из пластинчатого транспортера и винтового шнека, обеспечивает подачу асфальта из бункера на дорожное основание непосредственно перед разравнивающим брусом.
Типовой асфальтоукладчик снабжен бункером емкостью 5-15 тонн, в то время как типовой грузовик-самосвал для доставки асфальта имеет емкость кузова приблизительно 20 тонн. В передней части асфальтоукладчика обычно установлены ролики, предназначенные для зацепления с задними колесами грузового автомобиля для доставки асфальта. Такая конструкция обеспечивает подачу асфальта из грузового автомобиля в асфальтоукладчик путем расположения грузового автомобиля для доставки асфальта перед асфальтоукладчиком и подъема опрокидывающегося кузова грузового автомобиля для разгрузки асфальта в бункер по мере того, как асфальтоукладчик толкает грузовой автомобиль перед собой. Ввиду того, что грузовой автомобиль для доставки асфальта обычно перевозит в своем кузове большее количество асфальта, чем может принять бункер за один раз, асфальтоукладчик может толкать грузовой автомобиль для доставки асфальта в течение нескольких минут, в то время как его конвейерная система транспортирует асфальт из бункера на дорожное полотно перед разравнивающим брусом.
В некоторых случаях могут возникнуть трудности при эксплуатации асфальтоукладчика и грузового автомобиля для доставки асфальта в таком режиме. Ввиду условий дорожного движения и иных непредвиденных задержек, асфальтоукладчик достаточно часто опорожняет свой бункер для асфальта прежде, чем прибудет грузовой автомобиль для доставки асфальта и разгрузит асфальт в бункер. В таких случаях асфальтоукладчику необходимо прекратить процесс укладки асфальта и ждать прибытия другого грузового автомобиля для доставки асфальта. Даже если имеется несколько загруженных грузовых автомобилей, готовых разгрузить асфальт в бункер асфальтоукладчика, может возникнуть необходимость в останове асфальтоукладчика. В некоторых случаях водители грузовых автомобилей просто не в состоянии отогнать опорожненный грузовой автомобиль для доставки асфальта от передней части асфальтоукладчика и подогнать загруженный грузовой автомобиль для разгрузки асфальта в бункер прежде, чем произойдет опорожнение последнего.
Как известно специалистам в данной области техники, к которой относится изобретение, даже при кратковременной остановке асфальтоукладчика разравнивающий брус утопает в свежеуложенном слое асфальта. Далее, при возобновлении движения вперед асфальтоукладчика происходит внезапный подъем разравнивающего бруса, в результате чего происходит сброс избыточного количества асфальта на дорогу. В конечном счете, останов в процессе работы асфальтоукладчика приводит к образованию углублений и бугров на поверхности слоя асфальта, в результате чего образуется неровная поверхность покрытия. Таким образом, за последние годы нашли применение перегрузочные транспортные средства, обеспечивающие Челноковым способом подачу асфальта от грузовых автомобилей для доставки асфальта до асфальтоукладчика. Такие перегрузочные транспортные средства для транспортировки материала описаны в различных примерах осуществления в патентах США №4,818,139, №5,015,120, №.5,035,534 и №7,160,056, которые инкорпорированы в данное описание путем отсылки. В указанных патентах приведено описание самоходного асфальтоперегружателя, включающего бункер большого объема для приема материала автомобиля, и высокопроизводительный конвейер для разгрузки автомобиля, расположенный между указанным бункером и промежуточным бункером, объем которого позволяет вместить весь груз, доставленный грузовым автомобилем. Конвейер в промежуточном бункере предназначен для подачи асфальта на загрузочный конвейер асфальтоукладчика, способный поворачиваться вокруг в основном вертикальной оси таким образом, чтобы обеспечивалось расположение асфальтоперегружателя вдоль асфальтоукладчика, укладывающего слой асфальта, и быстрая разгрузка асфальта в бункер асфальтоукладчика. Ввиду технических возможностей быстрого проведения погрузочно-разгрузочных работ, асфальтоперегружатель для транспортировки материала имеет возможность совершать быстрые челночные операции между грузовыми автомобилями для доставки асфальта в точке приема материала и асфальтоукладчиком, укладывающим слой асфальта таким образом, чтобы исключить вероятность останова асфальтоукладчика в процессе укладки асфальта ввиду отсутствия асфальта.
Известны системы для регулирования потока асфальта в асфальтоукладчике или асфальтоперегружателе на основе устройств или датчиков, определяющих высоту материала в машине, расположенных в машине или рядом с ней. Указанные системы обычно предназначены для обеспечения того, чтобы на асфальтоукладчик поступало достаточное количество асфальта для обеспечения работ по укладке дорожного покрытия. Таким образом, например, в патенте США №3,678,817 приведено описание системы, предназначенной для регулирования потока асфальта к распределительному шнеку асфальтоукладчика за счет использования воспринимающей пластины, которая перемещается вверх в том случае, когда слой асфальта в подготовительной станции (расположенной непосредственно перед распределительным шнеком) является достаточно высоким для обеспечения контакта с пластиной. Система регулирования функционально связана с пластиной и с гидравлическим цилиндром, соединенным с подвижным затвором, расположенным рядом с распределительным шнеком. Положение затвора обеспечивает скорость подачи асфальта из бункера асфальтоукладчика к распределительному шнеку. В патенте США №4,823,366 приведено описание асфальтоукладчика, снабженного системой, аналогичной системе, описание которой приведено в патенте США №3,678,817, за тем исключением, что воспринимающая пластина заменена бесконтактным датчиком, установленным на асфальтоукладчике и предназначенным для регистрирования верхней поверхности материала для дорожного покрытия, непосредственно подаваемого к передней части распределительного шнека. В патенте США №5,100,277 приведено описание асфальтоперегружателя, предназначенного для установки в передней части асфальтоукладчика. Асфальтоперегружатель снабжен конвейером для разгрузки грузовика, при этом разгрузочный конец конвейера расположен над питательным бункером асфальтоукладчика. Приемный бункер для грузовиков, установленный на асфальтоперегружателе, присоединен к нижней приемной стороне разгрузочного конвейера, и затвор установлен на бункере над отверстием, выходящим на разгрузочный конвейер для грузовиков. Регулирование подачи асфальта на асфальтоукладчик обеспечивается путем изменения положения затвора на основе сигналов, получаемых с ультразвукового датчика, контролирующего высоту материала в бункере асфальтоукладчика. В патенте США №5,452,966 приведено описание асфальтоукладчика, снабженного передним бункером и ленточным конвейером, идущим от бункера по каналу к паре распределительных шнеков, расположенных в задней части машины. Два вертикальных затвора установлены в задней части канала, каждый из которых предназначен для перемещения в направлении вверх и в направлении вниз, управление которыми осуществляется датчиками подачи, которые определяют уровень материала для дорожного покрытия на дорожном полотне перед распределительными шнеками.
Несмотря на то, что известны системы, в которых используются затворы для регулирования потока асфальта с целью обеспечения подачи достаточного количества материала, исходя из уровня материала, которые установлены в асфальтоукладчике или в асфальтоперегружателе, указанные известные системы не предназначены для максимального повышения эффективности машины или транспортного средства. Было бы предпочтительным, если бы могла быть создана автоматическая система для регулирования потребляемой мощности разгрузочного конвейера асфальтоперегружателя путем регулирования скорости подачи асфальта с развозного грузового автомобиля в установленный на асфальтоперегружателе приемный бункер для грузовиков, тем самым максимально повышая эффективность асфальтоперегружателя.
Преимущества настоящего изобретения
Преимущества предпочтительного примера осуществления настоящего изобретения заключаются в том, что обеспечивается создание автоматической системы для регулирования потребляемой мощности разгрузочного конвейера асфальтоперегружателя путем регулирования скорости подачи асфальта с развозного грузового автомобиля на конвейер асфальтоперегружателя, предназначенный для разгрузки грузовика. Указанная система обеспечивает повышение эффективности работы системы разгрузки асфальта асфальтоперегружателя путем оптимизации скорости потока асфальта, подаваемого на разгрузочный конвейер для грузовиков. Такая система позволяет оптимизировать скорость, с которой может быть разгружен грузовик для доставки материала, и снизить вероятность того, что разгрузочный конвейер для грузовиков может остановиться или что двигатель асфальтоперегружателя будет подвержен в результате чрезмерной нагрузки при проведении разгрузочной операции.
Другие преимущества и признаки настоящего изобретения из следующего ниже описания со ссылками на прилагаемые рисунки.
Комментарии к толкованию терминов
Использование терминов "a", "an", "the" и аналогичных терминов в контексте описания настоящего изобретения следует истолковывать как охватывающие как единственное, так и множественное число, если в данной заявке не указано иное. Термины "содержащий", "имеющий", "включающий " и "вмещающий" следует истолковывать как неограничивающие термины (т.е. означающие, «включающий, в частности»), если не указано иное. Термины "в основном", "в целом" и иные слова, выражающие степень, являются относительными определениями, предназначенными для обозначения разрешенных отклонений от таким образом определенных характеристик. Использование указанных терминов при описании физических или функциональных характеристик изобретения не имеет своей целью ограничить такие характеристики до абсолютного значения, которое определяет термин, а скорее обеспечить приближение значения таких физических или функциональных характеристик. Все описанные в настоящей заявке способы могут быть выполнены в любом приемлемом порядке, если в настоящей заявке не указано иное.
Использование любого или всех примеров или иллюстративных выражений (например, "такой как" и "предпочтительно") в настоящей заявке предназначено исключительно для более полного разъяснения настоящего изобретения и его предпочтительных примеров осуществления, а не для ограничения объема настоящего изобретения. Ничто в описании настоящего изобретения не должно истолковываться как указывающее на любой элемент, как ключевой, для практического осуществления настоящего изобретения, если иное не указано конкретно.
В настоящей заявке конкретно определен ряд терминов. Этим терминам следует дать их наиболее широкое толкование, согласующееся с определениями, приведенными ниже:
Термин «асфальт» относится к смеси битумного покрытия, состоящей из битумного вяжущего и любого из различных заполнителей и используемой для целей создания покрытия.
Термины "асфальтоукладчик" и "укладчик дорожного покрытия" относятся к отделочной машине для нанесения асфальта с целью формирования слоя асфальта на поверхности дороги, парковочной стоянке или на аналогичной поверхности. Асфальтоукладчик, или укладчик дорожного покрытия обычно представляют собой самоходное транспортное средство, снабженное на одном конце бункером для приема асфальта и разравнивающим брусом на другом конце, предназначенном для формирования слоя асфальта.
Термин «слой асфальта» относится к слою асфальта, а именно, к слою асфальта, нанесенному асфальтоукладчиком для создания дорожного полотна, поверхности парковочной стоянки или аналогичной поверхности.
Термин "асфальтоперегружатель" относится к транспортному средству, предназначенному для приема асфальта из грузовика и его перегрузки в бункер асфальтоукладчика. Асфальтоперегружатель включает бункер для приема материала из грузовика, предназначенный для приема асфальта с грузовика, и разгрузочный конвейер для грузовиков, предназначенный для приема асфальта из приемного бункера для грузовиков.
В соответствии со значением, используемом в настоящем контексте, термин "входная часть" при использовании в отношении конвейера асфальтоперегружателя, относится к части конвейера, расположенной рядом с приемным бункером для грузовиков, и соединенный с ним.
Термин «линейный исполнительный механизм» относится к электрическому, гидравлическому, электрогидравлическому или механическому устройству, создающему усилие, направленное по прямой линии. Одним общераспространенным примером «линейного исполнительного механизма» является гидравлический исполнительный механизм двойного действия, содержащий цилиндр, поршень, размещенный внутри цилиндра, и шток, прикрепленный к поршню. При повышении давления внутри цилиндра на одной стороне поршня (превышающего давление на противоположной стороне поршня) шток выходит из цилиндра или втягивается в цилиндр.
Термин "вращательный исполнительный механизм" относится к электрическому, гидравлическому или электрогидравлическому двигателю или иному устройству, создающему усилие, направленное по дуге или вокруг центра вращения.
Термин "исполнительный механизм" относится к линейному исполнительному механизму и (или) к вращательному исполнительному механизму.
Краткое изложение существа настоящего изобретения
Настоящее изобретение включает устройство и способ для автоматического регулирования потока асфальта, подаваемого из установленного на асфальтоперегружателе приемного бункера для грузовиков на входную сторону смежного конвейера для разгрузки грузовика с целью оптимизации, по меньшей мере, одного рабочего параметра асфальтоперегружателя. Затвор установлен на приемном бункере для грузовиков рядом с входной стороной разгрузочного конвейера, при этом затвор предназначен для увеличения или уменьшения разгрузочного отверстия бункера, выходящего на разгрузочный конвейер для грузовиков. Контроллер функционально соединен с затвором и предназначен для обеспечения срабатывания затвора для увеличения или уменьшения разгрузочного отверстия бункера, выходящего на разгрузочный конвейер для грузовиков. Имеется датчик для определения, по меньшей мере, одного рабочего параметра асфальтоперегружателя. Указанный датчик функционально соединен с контроллером таким образом, чтобы изменения, по меньшей мере, одного рабочего параметра транспортного средства могли быть переданы на контроллер. Контроллер предназначен для регулирования скорости потока асфальта в разгрузочный бункер для грузовиков с целью оптимизации, по меньшей мере, одного рабочего параметра асфальтоперегружателя.
Предпочтительный пример осуществления настоящего изобретения включает датчики, предназначенные для регистрирования изменений гидравлического давления в системе привода разгрузочного конвейера, и (или) для определения изменений скорости двигателя, снабжающего энергией приводную систему разгрузочного конвейера. Указанные датчики также предназначены для передачи указанных изменений на контроллер. В указанном примере осуществления настоящего изобретения контроллер регулирует размер разгрузочного отверстия бункера, выходящего на разгрузочный конвейер для грузовиков с целью оптимизации гидравлического давления в системе привода разгрузочного конвейера и (или) с целью оптимизации рабочей скорости двигателя, снабжающего энергией приводную систему разгрузочного конвейера.
С целью содействия пониманию настоящего изобретения предпочтительные примеры осуществления настоящего изобретения проиллюстрированы на рисунках, и ниже приведено их подробное описание. Тем не менее, следует понимать, что настоящее изобретение не ограничено конкретными описанными примерами осуществления или их использованием в связи с проиллюстрированным в данном описании устройством. Возможно внесение многочисленный изменений и модификаций, которые очевидны специалистам в данной области техники, к которой относится настоящее изобретение, не выходящие за пределы объема изобретения, определенного его формулой.
Краткое описание чертежей
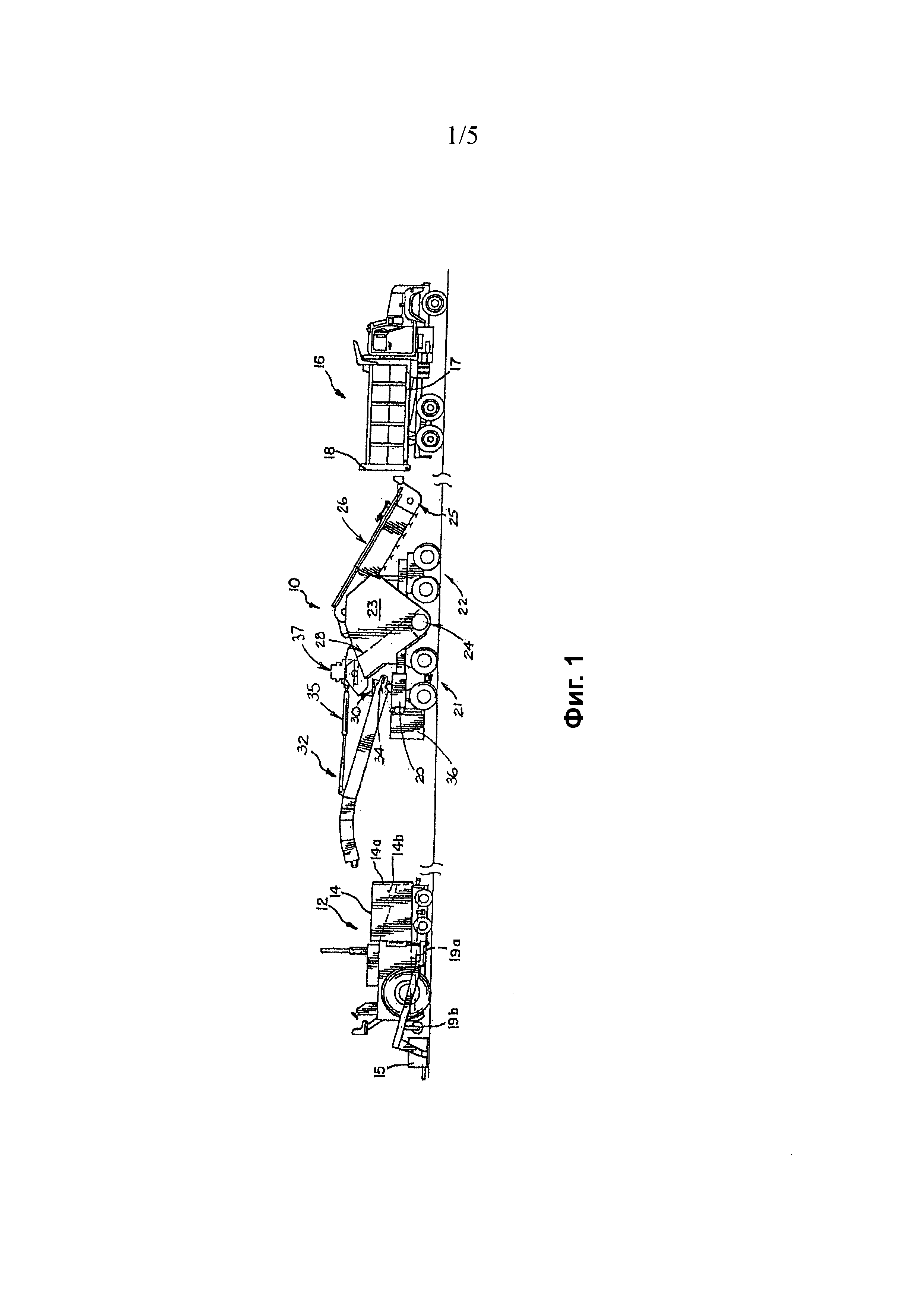
Фиг. 1 - вид сбоку асфальтоперегружателя в сочетании с грузовиком для доставки асфальта и асфальтоукладчиком.
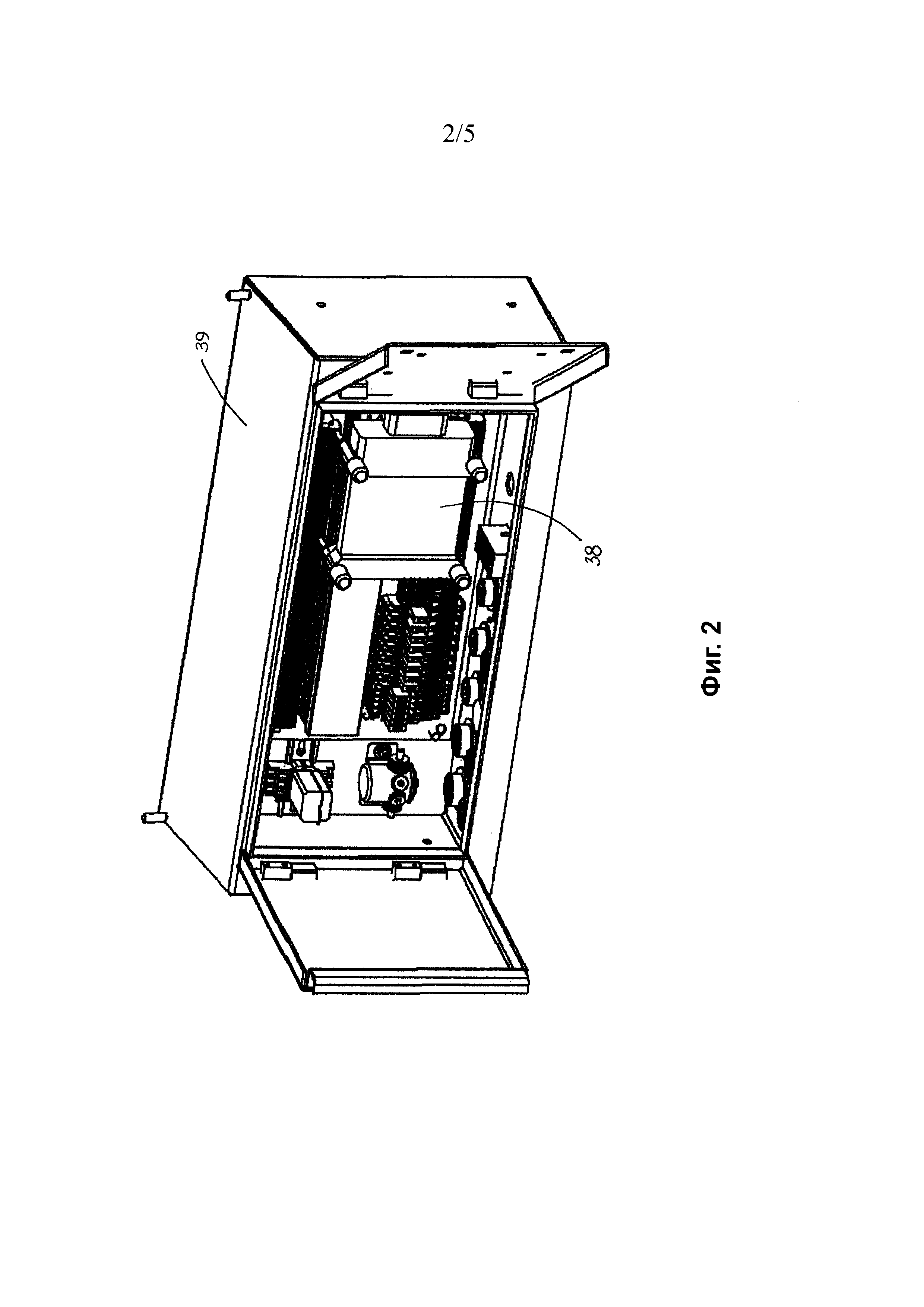
Фиг. 2 - вид в перспективе предпочтительного примера осуществления контроллера настоящего изобретения. Указанный контроллер установлен в шкафу, расположенном на рабочем месте оператора асфальтоперегружателя, такого как асфальтоперегружатель, показанный на Фиг. 1.
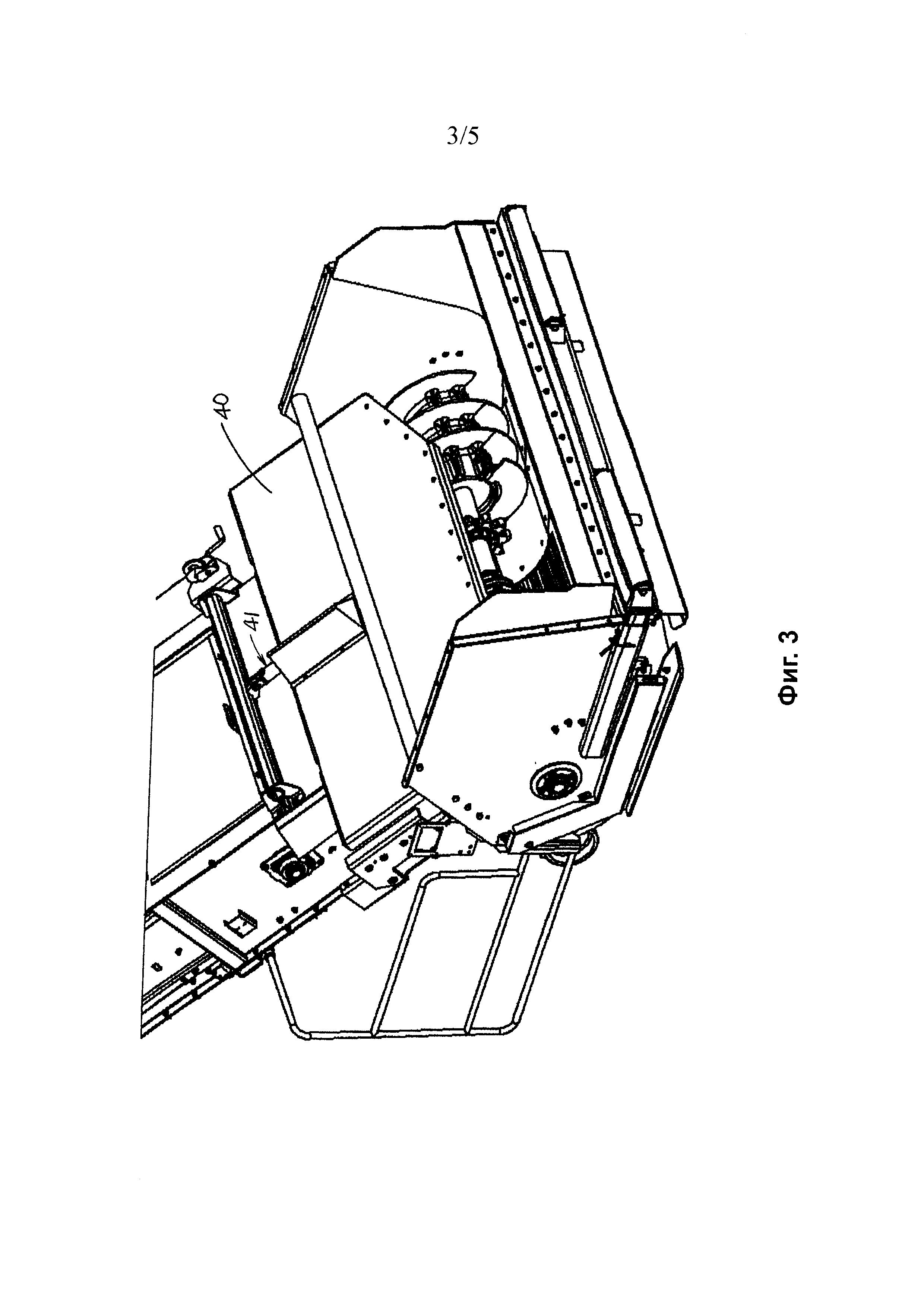
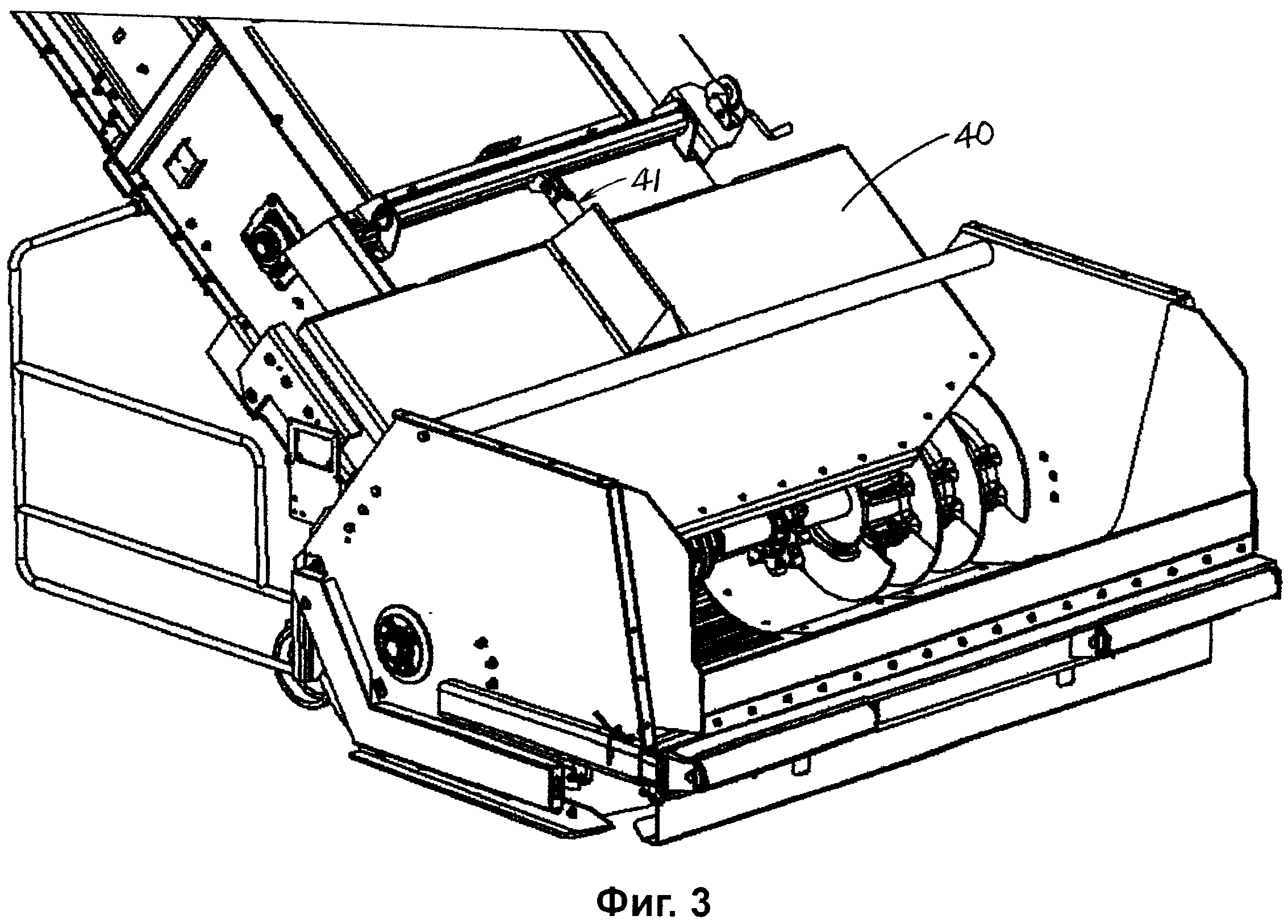
Фиг. 3 - вид в перспективе установленного на асфальтоперегружателе приемного бункера для грузовиков, иллюстрирующий первый пример осуществления затвора, регулирующего поток материала.
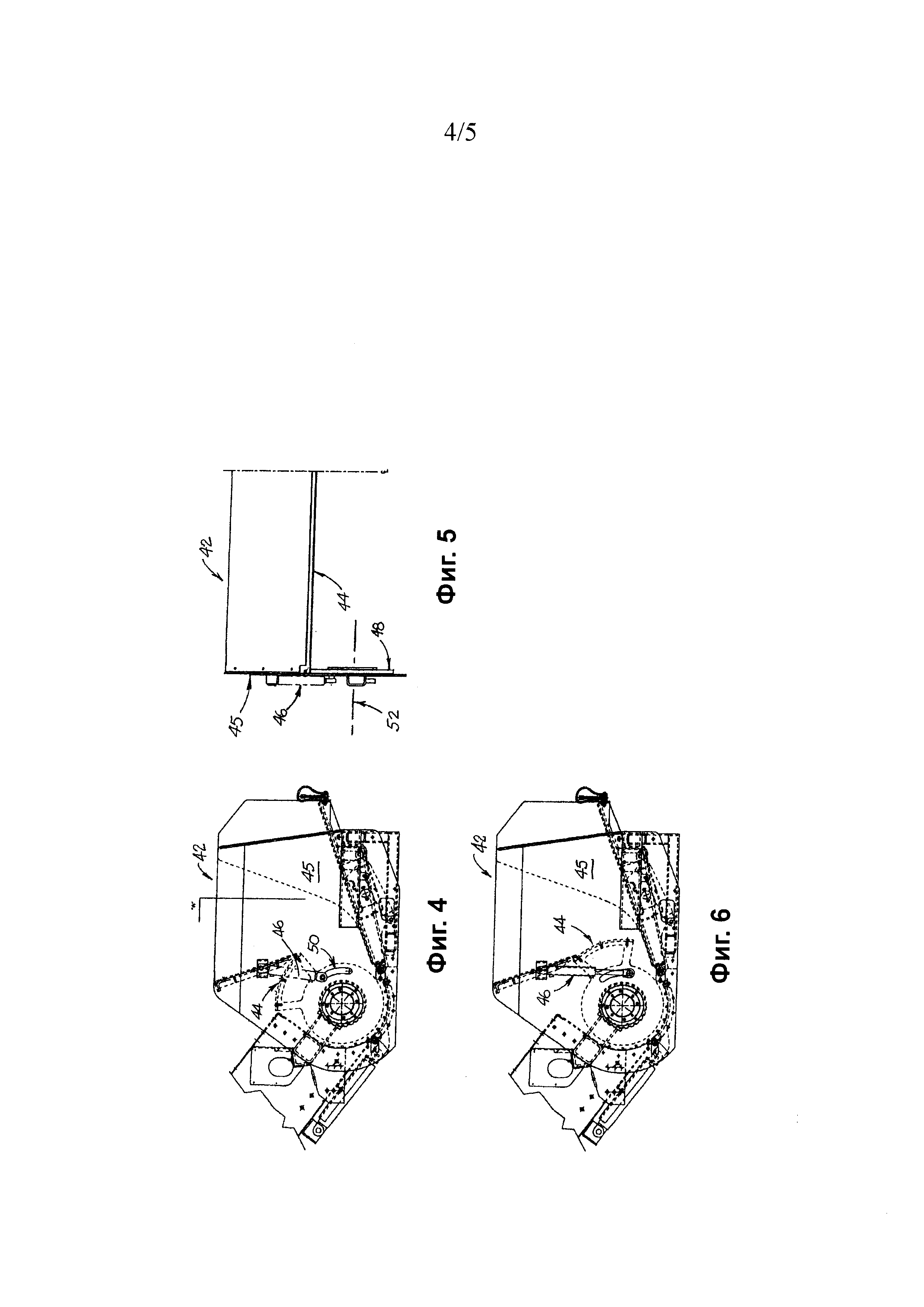
Фиг. 4 - вид сбоку в разрезе установленного на асфальтоперегружателе приемного бункера для грузовиков, иллюстрирующий второй пример осуществления регулирующего поток материала затвора в положении полного открытия для обеспечения максимального объема потока.
Фиг. 5 - частичный вид спереди установленного на асфальтоперегружателе приемного бункера для грузовиков, приведенного на Фиг. 4, в разрезе по линии "А".
Фиг. 6 - вид сбоку в разрезе установленного на асфальтоперегружателе приемного бункера для грузовиков, иллюстрирующий второй пример осуществления регулирующего поток материала затвора в положении открытия, обеспечивающем минимальный объем потока материала.
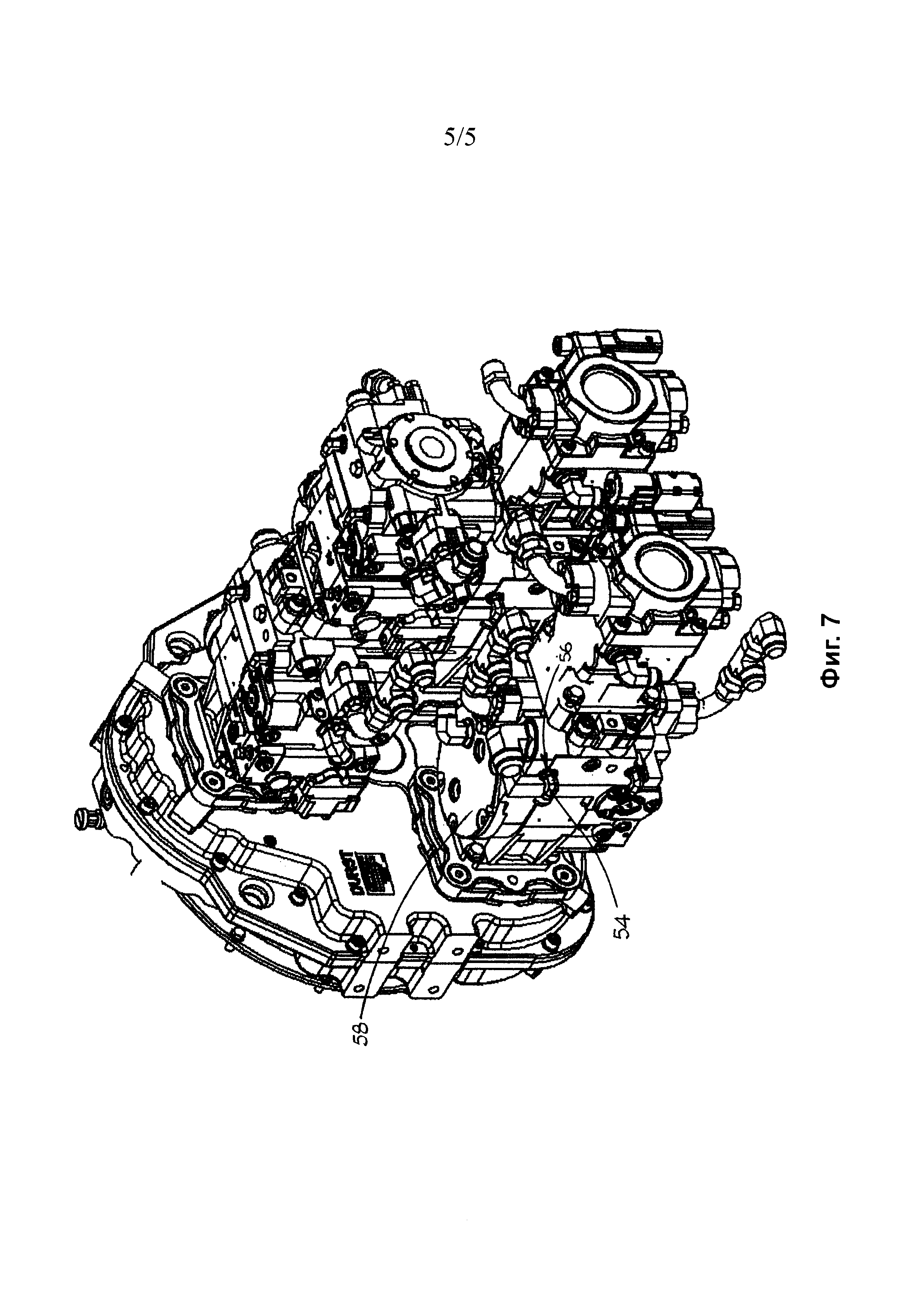
Фиг. 7 - вид в перспективе гидронасосной установки, иллюстрирующий размещение датчика давления, используемого в предпочтительном примере осуществления настоящего изобретения.
Детальное описание предпочтительных примеров осуществления настоящего изобретения
Как показано на Фиг. 1, самоходный асфальтоперезагружатель 10 расположен рядом с асфальтоукладчиком 12 и известным грузовиком 16 для доставки асфальта. Асфальтоукладчик 12 может быть приведен в действие для укладки дорожного покрытия 13 в направлении слева направо, как показано на Фиг. 1.
Асфальтоукладчик 12 включает бункер 14, расположенный в его передней части. В примере осуществления настоящего изобретения, показанном на Фиг. 1, бункер 14 был увеличен в объеме за счет увеличения высоты передней стенки 14а и боковых стенок 14b. Асфальтоукладчик 12 также включает вибробрус 15, установленный на тыльной стороне автоукладчика, и известную конвейерную систему, включающую продольно расположенные конвейеры 19а и поперечно расположенный винтовой шнек 19b для подачи асфальта из бункера 14 и размещения материала непосредственно перед вибробрусом 15, и из этого положения материал выгружают на поверхность, на которой выполняется укладка покрытия. Известный грузовик 16 для доставки материала включает поворотный кузов 17 с задним откидным бортом 18, и предназначен для перевозки асфальта из удаленного источника к асфальтоперегружателю 10. Предпочтительно, чтобы грузовик для доставки материала доставлял асфальт к асфальтоперегружателю, расположенному в удобном месте на расстоянии от асфальтоукладчика, и чтобы затем асфальтоперегружатель транспортировал асфальт к месту укладки дорожного покрытия для разгрузки асфальта в бункер 14 асфальтоукладчика. Таким образом, асфальтоперегружатель 10 предназначен для выполнения челночных операций между грузовиками для доставки асфальта в точке приемки асфальта и асфальтоукладчиком, используемом для укладки дорожного покрытия.
Асфальтоперегружатель 10 включает раму 20, опорой для которой на поверхности дороги служит первый колесный комплект 21 и второй колесный комплект 22. Каждый из колесных комплектов приводится в действие гидравлическим двигателем (не показан), в который подается жидкость под давлением с помощью одного или нескольких гидравлических насосов (также не показаны). Асфальтоперегружатель 10 снабжен промежуточным бункером 23, установленным на раме 20 и включающим поперечный шнек 24, используемый для перемешивания асфальта в промежуточном бункере с целью сокращения до минимума сегрегации или разделения заполнителя асфальта по гранулометрическому составу. Асфальтоперегружатель 10 также включает бункер 25 для приема материала из грузовика и разгрузочный конвейер для грузовиков 26 для приема асфальта из грузовика для доставки асфальта 16 и его транспортировки к промежуточному бункеру. Разгрузочный конвейер для грузовиков 26 включает известную приводную систему, содержащую гидравлический насос, приводящий в действие один или несколько гидравлических двигателей.
Ширина бункера 25 асфальтоперегружателя 10 обычно равна ширине кузова 17 грузовика и бункер регулируется по длине таким образом, чтобы содержимое грузовика 16 могло быть легко и быстро разгружено в бункер. Асфальтоперегружатель 10 снабжен известным механизмом, такими как один или несколько исполнительных механизмов (не показаны) для перемещения бункера 25 вертикально между нижним положением приема асфальта, при котором бункер оптимально расположен для обеспечения разгрузки асфальта из грузовик для доставки материала в бункер, и одним или несколькими положениями в поднятом состоянии, включающими положение перемещения, показанное на Фиг. 1. Конвейер 26 является конвейером скребково-пластинчатого типа и предназначен для транспортировки асфальта из приемного бункера 25 для грузовиков в промежуточный бункер 23. Скребково-пластинчатый разгрузочный конвейер 28 расположен вдоль наклонной стороны промежуточного бункера 23 напротив конвейера 26 для разгрузки грузовика и предназначен для транспортировки асфальта из промежуточного бункера к лотку 30, который соединен с конвейером 32 для загрузки материала в асфальтоукладчик. Асфальт, транспортируемый из промежуточного бункера конвейером 28, падает на лоток 30 и затем по нему подается на конвейер 32 для загрузки материала в асфальтоукладчик. Конвейер 32 для загрузки материала в асфальтоукладчик является также конвейером скребково-пластинчатого типа и установлен для обеспечения вертикального поворотного перемещения вокруг поворотной оси 34 при его подъеме и опускании с помощью линейного исполнительного механизма 35. Конвейер 32 также предназначен для перемещения в поперечном направлении вокруг вертикальной оси (не показана), проходящей через бункер 30, с помощью другого исполнительного механизма (также не показан). Устройство также снабжено гидравлическими приводными системами, включающими гидравлические насосы и гидравлические двигатели для приведения в действие поперечного шнека 24 и различных конвейеров, и при этом двигатель 36 передает крутящий момент на гидравлические насосы, которые, в свою очередь, приводят в действие гидравлические двигатели для колесных комплектов, поперечного шнека и различных конвейеров, в том числе (в частности) конвейер 26 для разгрузки грузовика, и иные компоненты асфальтоперегружателя.
Асфальтоперегружатель 10 управляется оператором, находящимся на рабочем месте оператора 37. Контроллер, например, микропроцессор 38 (показан на Фиг. 2) размещен в шкафу 39 на рабочем месте оператора 37 и предназначен для обеспечения работы устройства настоящего изобретения, в том числе систем и компонентов асфальтоперегружателя 10.
Как было описано выше, настоящее изобретение включает систему для автоматического регулирования потока асфальта из приемного бункера для грузовиков асфальтоперегружателя на разгрузочный конвейер для грузовиков с целью оптимизации, по меньшей мере, одного рабочего параметра асфальтоперегружателя. Система работает, обеспечивая автоматическое регулирование расположения затвора относительно бункера для разгрузки грузовика на основе, по меньшей мере, одного рабочего параметра асфальтоперегружателя. Предпочтительно, чтобы работа системы была основана на изменении гидравлического давления в системе привода разгрузочного конвейера и (или) на изменении скорости двигателя, снабжающего энергией приводную систему разгрузочного конвейера.
Настоящее изобретение включает затвор, установленный на приемном бункере 25 для грузовиков, который предназначен для увеличения или уменьшения размера разгрузочного отверстия бункера, выходящего на входную сторону конвейера 26 для разгрузки грузовиков. Как показано на Фиг. 3, один пример осуществления указанного затвора включает пластину затвора 40, предназначенную для перемещения в бункер и из бункера 25 вдоль линии, параллельной продольной оси конвейера 26 и совпадающей с плоскостью пластины затвора 40. При перемещении пластины затвора в бункер и из бункера пластина уменьшает или увеличивает размер разгрузочного отверстия бункера на входной стороне конвейера 26 для разгрузки грузовика, тем самым регулируя количество асфальта, которое может поступить на разгрузочный конвейер для грузовиков. В состав системы, проиллюстрированной на Фиг. 3, входит, по меньшей мере, один исполнительный механизм, например, исполнительный механизм 41, который предназначен для перемещения пластины затвора 40 в разгрузочный бункер для грузовиков и из него между положением полного открытия для обеспечения максимального потока асфальта, положением минимального потока асфальта и одним или несколькими промежуточными положениями, включая начальное положение разгрузки, как, например, проиллюстрировано на Фиг. 3. Предпочтительно, чтобы исполнительный механизм 41 являлся линейным исполнительным механизмом двойного действия с функциональными возможностями обратной связи по позиционированию, предназначенным для передачи информации о своем относительном положении на контроллер (или микропроцессор) 38. В качестве альтернативы могут быть установлены датчики положения (не показаны) для определения относительного положения пластины затвора 40 по ее траектории перемещения и для передачи этой информации на микропроцессор 38. Такие датчики положения могут включать линейные датчики положения пластины затвора, ограничительные выключатели или электронные концевые выключатели в разгрузочном бункере для грузовиков, или иные механизмы, известные специалистам в данной области техники, с помощью которых обеспечивается определение относительного положения пластины затвора.
Как описано выше, разгрузочный бункер для грузовиков может перемещаться между нижним положением приема асфальта и одним или несколькими более высокими положениями, включая положение перемещения в поднятом состоянии. Предпочтительно, чтобы контроллер обменивался информацией с исполнительным механизмом 41 для перемещения пластины затвора в положение полного открытия при нахождении бункера для разгрузки транспортного средства в поднятом состоянии выше положения приема асфальта. Затем при опускании бункера для разгрузки транспортного средства до положения приема асфальта контроллер подает команду на закрытие пластины затвора до предварительно заданного начального положения разгрузки, как показано на Фиг. 3. Грузовик для доставки материала далее может поднять свой кузов для разгрузки асфальта в бункер 25. По мере того, как асфальт начинает перемещаться в бункер 25, контроллер приводит в действие конвейер 26 для разгрузки грузовика для транспортировки асфальта из приемного бункера для грузовиков 25 в промежуточный бункер 23. Увеличение количества асфальта в разгрузочном конвейере для грузовиков повышает гидравлическое давление в системе привода конвейера 26 и (или) понижает скорость двигателя, снабжающего энергией приводную систему конвейера 26. Датчики, определяющие повышение гидравлического давления в системе привода конвейера 26 выше первого заданного значения гидравлического давления и (или) снижение скорости двигателя, приводящего в действие гидравлический насос, который, в свою очередь, приводит в действие гидравлические двигатели, ниже первого заданного значения скорости двигателя, передают сигнал на контроллер (или микропроцессор) 38 который, в свою очередь, передает сигнал на перемещение пластины затвора в положение большего закрытия. Благодаря этому происходит снижение скорости потока асфальта на конвейер 26, таким образом обеспечивая снижение гидравлического давления в приводной системе конвейера 26 до уровня ниже первого заданного значения гидравлического давления и (или) увеличение скорости двигателя, снабжающего энергией приводную систему конвейера 26, до уровня выше первого заданного значения скорости двигателя. После того, как гидравлическое давление в системе привода конвейера 26 и (или) скорость двигателя достигнут более приемлемого уровня, контроллер может вновь передать сигнал на перемещение затвора в более открытое положение. Следует иметь в виду, что несколько перемещений затвора в бункер 25 и из него может быть осуществлено в процессе разгрузки одного грузовика для доставки материала.
Второй пример осуществления приемного бункера для грузовиков показан на Фиг. 4-6. Как видно из рисунков, бункер 42 снабжен регулируемым затвором 44. Бункер 42 имеет левую и правую наружные стенки, одна из которых, левая наружная стенка 45, показана на рисунках. Данный пример осуществления затвора включает изогнутую пластину затвора, предназначенную для перемещения в бункер 42 и из него между положением полного открытия для обеспечения максимального потока асфальта, показанным на Фиг. 4 и 5, положением для обеспечения минимального потока асфальта, показанным на Фиг. 6, и одним или несколькими промежуточными положениями, включая начальное положение разгрузки. Система предназначена для автоматического регулирования положения затвора 44 относительно разгрузочного бункера 42 для грузовиков. Система включает пару исполнительных механизмов затвора, один из которых, исполнительный механизм 46 затвора, показан на рисунке. Каждый из указанных исполнительных механизмов затвора установлен на одной стороне бункера 42 и предназначен для взаимодействия с другим исполнительным механизмом затвора для перемещения затвора в разгрузочный бункер для грузовиков и из него между положением полного открытия для обеспечения максимального потока асфальта, положением минимального потока асфальта и одним или несколькими промежуточными положениями, включая начальное положение разгрузки.
Предпочтительно, чтобы указанные исполнительные механизмы затвора являлись линейными исполнительными механизмами двойного действия, установленными рядом с наружными стенками бункера. Конец штока каждого линейного исполнительного механизма присоединен к раме затвора на каждой стороне бункера (одна из которых, рама затвора 48, показана на рисунке). В смежной наружной стенке бункера выполнена прорезь, такая как прорезь 50, для обеспечения вращения рамы затвора вокруг оси вращения 52 по мере выдвижения и втягивания конца штока линейного исполнительного механизма. Датчики положения (не показаны) могут быть установлены для определения положения затвора вдоль траектории его перемещения. Такие датчики положения могут включать датчики положения затвора, ограничительные выключатели или электронные концевые выключатели в разгрузочном бункере для грузовиков, и (или) линейные датчики положения, установленные в линейных исполнительных механизмах, или иные механизмы, известные специалистам в данной области техники, с помощью которых обеспечивается определение относительного положения затвора.
В указанном примере осуществления настоящего изобретения предпочтительно, чтобы контроллер посылал сигнал на исполнительные механизмы затвора для перемещения затвора в положение полного открытия, как показано на Фиг. 4 и 5, при нахождении бункера для разгрузки грузовика в поднятом состоянии выше положения приема асфальта. Затем при опускании бункера для разгрузки грузовика до положения приема асфальта контроллер может направить сигнал на исполнительные механизмы затвора для закрытия затвора до предварительно заданного начального положения разгрузки. Грузовик для доставки материала далее может поднять свой кузов для разгрузки асфальта в бункер 42. По мере того, как асфальт начинает перемещаться в бункер 42, контроллер приводит в действие конвейер (аналогичный конвейеру 26 примера осуществления на Фиг. 1 и 3) для транспортировки асфальта из приемного бункера 42 для грузовиков в промежуточный бункер. Увеличение количества асфальта в разгрузочном конвейере для грузовиков повышает гидравлическое давление в системе привода конвейера и (или) понижает скорость двигателя, снабжающего энергией приводную систему конвейера. Датчики, определяющие повышение гидравлического давления в системе привода конвейера выше заданного значения гидравлического давления и (или) снижение скорости двигателя, приводящего в действие гидравлический насос, который, в свою очередь, приводит в действие гидравлические двигатели, ниже заданного значения скорости двигателя, передают сигнал на контроллер, который, в свою очередь, передает сигнал на перемещение затвора в более закрытое положение. Благодаря этому происходит снижение скорости потока асфальта на разгрузочный конвейер для грузовиков, таким образом обеспечивая снижение гидравлического давления в приводной системе конвейера до уровня ниже заданного значения гидравлического давления и (или) увеличение скорости двигателя, снабжающего энергией приводную систему конвейера до уровня выше заданного значения скорости двигателя. После того, как гидравлическое давление в системе привода конвейера и (или) скорость двигателя достигнут более приемлемого уровня, контроллер может вновь передать сигнал на перемещение затвора в положение большего открытия. Следует иметь в виду, что несколько перемещений затвора в бункер 42 и из него может быть осуществлено в процессе разгрузки одного грузовика для доставки материала. В определенный момент в процессе разгрузки количество асфальта в бункере 42 может снизиться до уровня, который приведет к снижению гидравлического давления в системе привода конвейера для разгрузки грузовика до заданного уровня (либо приведет к повышению скорости двигателя до заданного уровня), при котором контроллер вызовет перемещение затвора до положения полного открытия, показанного на Фиг. 4 и 5.
Как было описано в настоящей заявке, система для автоматического регулирования потока асфальта из приемного бункера для грузовиков асфальтоперегружателя на разгрузочный конвейер для грузовиков работает, обеспечивая автоматическое регулирование размера отверстия бункера для разгрузки грузовика, выходящего на разгрузочный конвейер для грузовиков, на основе, по меньшей мере, одного рабочего параметра асфальтоперегружателя. Предпочтительно, чтобы работа системы была основана на изменении гидравлического давления в системе привода разгрузочного конвейера и (или) на изменении скорости двигателя, приводящего в движение гидравлический насос, который, в свою очередь, приводит в движение гидравлические двигатели разгрузочного конвейера для грузовиков.
В предпочтительном примере осуществления настоящего изобретения датчик давления 54 установлен в направленном вперед контрольном отверстии 56 гидравлического насоса 58, который является частью приводной системы конвейера для разгрузки грузовика, как показано на Фиг. 7. В данном примере осуществления настоящего изобретения датчик давления 54 функционально соединен с микропроцессором 38, и микропроцессор запрограммирован для обеспечения уменьшения размера разгрузочного отверстия бункера, выходящего на разгрузочный конвейер для грузовиков, когда гидравлическое давление в системе привода разгрузочного конвейера превышает заданное значение гидравлического давления, и для увеличения размера разгрузочного отверстия бункера, выходящего на разгрузочный конвейер для грузовиков, когда гидравлического давления в системе привода разгрузочного конвейера опускается ниже предварительно заданного гидравлического давления.
Также следует иметь в виду, что работа системы может быть основана на изменении скорости двигателя, который снабжает энергией разгрузочный конвейер для грузовиков. В предпочтительном примере осуществления настоящего изобретения работа системы основана на изменении скорости двигателя, который приводит в движение гидравлический насос, который, в свою очередь, приводит в движение гидравлические двигатели приводной системы разгрузочного конвейера. В стандарте J1939 Общества инженеров автомобильной промышленности ("SAE") приведено описание рекомендуемой практики использования шины обмена сообщениями для автомобильных систем и компонентов. Стандарт SAE J1939 включает спецификацию локальной сети контроллеров ("CAN") для электронного обмена сообщениями с двигателем. Предпочтительно, чтобы микропроцессор 38 был связан с двигателем по CAN (высокого уровня) и CAN (низкого уровня) таким образом, чтобы внутренние датчики в двигателе имели возможность передавать информацию о скорости двигателя на контроллер. Если двигатель не предназначен для обмена электронными сообщениями, то в этом случае датчик для регистрирования сигнала, указывающего на количество импульсов на один оборот генератора переменного тока, может быть связан с микропроцессором. В соответствии с другим вариантом, электронный датчик оборотов может быть установлен в отверстии маховика двигателя и соединен с микропроцессором. В другом варианте неэлектронного примера осуществления настоящего изобретения микропроцессор может быть запрограммирован для преобразования регистрируемых импульсов за оборот в значение скорости двигателя. В примерах осуществления настоящего изобретения, основанных на изменении скорости двигателя, снабжающего энергией приводную систему разгрузочного конвейера, микропроцессор запрограммирован для уменьшения размера разгрузочного отверстия бункера, выходящего на разгрузочный конвейер для грузовиков, когда скорость падает ниже заданного значения, и для увеличения разгрузочного отверстия бункера, выходящего на разгрузочный конвейер для грузовиков, когда скорость двигателя возрастает выше заданного значения.
В некоторых примерах осуществления настоящего изобретения контроллер может подать сигнал на затвор для обеспечения более или менее непрерывного перемещения для увеличения или уменьшения разгрузочного отверстия бункера, выходящего на разгрузочный конвейер для грузовиков для поддержания гидравлического давления в системе привода разгрузочного конвейера в пределах заданного диапазона, находящегося приблизительно в рамках предварительно заданного значения оптимального гидравлического давления и (или) для поддержания скорости двигателя, снабжающего энергией приводную систему разгрузочного конвейера в пределах заданного диапазона, находящегося приблизительно в рамках предварительно заданного значения оптимальной скорости двигателя. Таким образом, например, если оптимальное заданное значение гидравлического давления в системе привода разгрузочного конвейера составляет "X" фунтов на кв. дюйм, контроллер может подать сигнал на затвор для обеспечения его более или менее непрерывного перемещения в приемный бункер для грузовиков и из него для поддержания гидравлического давления в системе привода разгрузочного конвейера в диапазоне от XLOW, заданный минимальный уровень давления, составляющая менее X, до XHIGH, заданный максимальный уровень давления, составляющий более X. В некоторых примерах осуществления настоящего изобретения как XLOW, так и XHIGH могут составлять до 1000 фунтов на кв. дюйм, таким образом, чтобы диапазон, в пределах которого функционирует контроллер, составлял X±1000 фунтов на кв. дюйм. Аналогичном образом, если оптимальное заданное значение скорости двигателя, снабжающего энергией приводную систему разгрузочного конвейера составляет "Y" оборотов в минуту, контроллер может подавать сигнал на затвор для обеспечения более или менее непрерывного перемещения в приемный бункер для грузовиков и из него для поддержания скорости двигателя в диапазоне от YLOW, заданная минимальная скорость, составляющая менее Y, до YHIGH, заданная максимальная скорость, составляющая более Y. В некоторых примерах осуществления настоящего изобретения YLOW может составлять 200 оборотов в минуту и YHIGH может составлять 50 оборотов в минуту таким образом, чтобы диапазон составлял от Y-200 оборотов в минуту до Y+50 оборотов в минуту.
В других примерах осуществления настоящего изобретения контроллер может подать сигнал на затвор для обеспечения ступенчатого перемещения для увеличения или уменьшения разгрузочного отверстия бункера, выходящего на приемный конвейер для грузовиков для поддержания гидравлического давления в системе привода разгрузочного конвейера в диапазоне от XLOW до XHIGH и (или) для поддержания скорости двигателя, снабжающего энергией приводную систему разгрузочного конвейера, в диапазоне от YLOW до YHIGH. Например, если оптимальное заданное значение гидравлического давления в системе привода разгрузочного конвейера составляет "X" фунтов на кв. дюйм, контроллер может подать сигнал на затвор для перемещения на первую заданную величину для ограничения потока материала, подаваемого на разгрузочный конвейер для грузовиков, если гидравлическое давление в работающей системе разгрузочного конвейера для грузовиков увеличивается до X+100 фунтов на кв. дюйм. Затем, если гидравлическое давление в работающей системе продолжает возрастать до X+200 фунтов на кв. дюйм, контроллер может подать сигнал на затвор для перемещения на вторую заданную величину для дальнейшего ограничения потока материала, подаваемого на разгрузочный конвейер для грузовиков. Такое ступенчатое перемещение затвора может продолжаться при повышении гидравлического давления в системе привода до тех пор, пока затвор не займет положение, обеспечивающее минимальный поток материала, когда гидравлическое давление в приводной системе достигает XHIGH. Аналогичным образом, если гидравлическое давление в системе привода разгрузочного конвейера снижается до X-100 фунтов на кв. дюйм, контроллер может подать сигнал на затвор для перемещения в положение более полного открытия на первую заданную величину. Затем, если гидравлическое давление в системе привода продолжает снижаться до X-200 фунтов на кв. дюйм, контроллер может подать сигнал на затвор для перемещение на вторую заданную величину для еще более полного открытия входной стороны приемного бункера для грузовиков. Такое ступенчатое перемещение затвора в положение более полного открытия может продолжаться при снижении гидравлического давления в системе привода до тех пор, пока затвор не достигнет своего положения, обеспечивающего максимальный поток, когда гидравлическое давление в системе привода достигает XLOW.
Аналогичным образом, если оптимальное заданное значение скорости двигателя, снабжающего энергией приводную систему разгрузочного конвейера составляет "Y" оборотов в минуту, контроллер может подать сигнал на затвор для перемещения на первую заданную величину для ограничения потока материала, подаваемого на разгрузочный конвейер для грузовиков, если скорость двигателя снижается до Y-20 оборотов в минуту. Затем, если скорость двигателя продолжает снижаться до Y-40 оборотов в минуту, контроллер может подать сигнал на затвор для перемещения на вторую заданную величину для дальнейшего ограничения потока материала, подаваемого на разгрузочный конвейер для грузовиков. Такое ступенчатое перемещение затвора относительно бункера может продолжаться при снижении скорости двигателя до тех пор, пока затвор не достигнет своего положения, обеспечивающего минимальный поток, когда скорость двигателя достигает YLOW. Аналогичным образом, если скорость двигателя, снабжающего энергией приводную систему разгрузочного конвейера возрастает до Y+10 оборотов в минуту, контроллер может подать сигнал на затвор для перемещения в положение более полного открытия на первую заданную величину. Далее, если скорость двигателя продолжает увеличиваться до Y+20 оборотов в минуту, контроллер может подать сигнал на затвор для перемещения на вторую заданную величину в положение еще большего открытия. Такое ступенчатое перемещение затвора относительно бункера может продолжаться при увеличении скорости двигателя, пока затвор не достигнет своего положения, обеспечивающего максимальный поток материала, когда скорость двигателя достигает YHIGH.
В других примерах осуществления настоящего изобретения контроллер может подать сигнал на затвор для перемещения между положением полного открытия и одним или несколькими промежуточными положениями на основе прохождения заданных приращений времени.
Несмотря на то, что настоящее описание содержит множество специфических особенностей, они не должны истолковываться как ограничивающие объем настоящего изобретения, а исключительно как иллюстрирующие его предпочтительные примеры осуществления, а также как наилучший вариант осуществления настоящего изобретения, предполагаемый изобретателем. В настоящее изобретение в соответствии с приведенным в данной заявке описанием, могут быть внесены многочисленные изменения и доработки, что очевидно специалистам, обладающим обычными познаниями в данной области техники, к которой относится настоящее изобретение.
Вставка для бункера асфальтоукладчика
Перегрузочное транспортное средство для транспортировки материала, используемое при укладке асфальтового покрытия
Автокалибровка системы автоматического регулирования уклона в рабочей машине
Система блокировки фрезерного барабана дорожной фрезерной машины
Распылительный узел для дорожно-строительной машины, снабженный клапанами прямого действия
Система для отслеживания срока эксплуатации конвейера рабочей машины
Технологическая линия оборудования холодной переработки дорожного покрытия на месте с использованием асфальто-цементной смеси
Вставка для бункера асфальтоукладчика
Перегрузочное транспортное средство для транспортировки материала, используемое при укладке асфальтового покрытия

