Результат интеллектуальной деятельности: ЭЛЕКТРИЧЕСКАЯ КАЛИБРОВКА ДАТЧИКА СИСТЕМЫ УПРАВЛЕНИЯ ПЕРЕПУСКНОЙ ЗАСЛОНКОЙ С ОБНАРУЖЕНИЕМ КОНЦЕВОГО УПОРА
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Наддув двигателя может регулироваться посредством настройки количества газа, протекающего через турбину турбонагнетателя, например, с помощью перепускной заслонки для отработавших газов. Наиболее близким аналогом предлагаемого изобретения является решение, раскрытое в документе US 8109089 (B2) (07.02.2012). В одном из примеров перепускная заслонка может включать в себя клапан перепускной заслонки и седло клапана. Клапан перепускной заслонки может приводиться в действие ассоциативно связанным электрическим приводом. Электрический привод может управляться для настройки положения клапана перепускной заслонки, тем самым регулируя количество газа, протекающего через турбину, и добиваясь требуемого наддува. Электрическое приведение в действие перепускной заслонки может давать более быструю реакцию и более точное регулирование положения относительно перепускной заслонки с пневматическим приводом. Более быстрая реакция и более точное регулирование могут повышать коэффициент полезного действия двигателя, эффективность использования топлива и снижение токсичности выбросов.
В одном из примеров электрический привод, который используется для регулирования положения клапана перепускной заслонки, включает в себя электродвигатель, который передает усилие на множество тяг, которые присоединены к клапану перепускной заслонки. Множество тяг непосредственно приводят в движение клапан перепускной заслонки, чтобы настраивать положение клапана перепускной заслонки. Множество тяг предоставляет электродвигателю возможность располагаться удаленно от выпускного канала, где расположена перепускная заслонка, с тем, чтобы понижать вероятность ухудшения характеристик электродвигателя вследствие подвергания воздействию тепла. Электродвигатель управляется на основании обратной связи с датчика положения, который присоединен к выходному валу редуктора и дает показание положения клапана перепускной заслонки.
Однако изобретатели в материалах настоящей заявки идентифицировали некоторые потенциальные проблемы у такого подхода. Например, хотя датчик выходного вала редуктора обеспечивает выявление положения выходного вала редуктора, и клапан перепускной заслонки настраивается на основании информации о положении выходного вала редуктора, датчик не дает указания концевого упора перепускной заслонки. В частности, концевой упор перепускной заслонки может включать в себя положение, причем клапан перепускной заслонки надлежащим образом выравнивается с седлом клапана, чтобы по существу предотвращать протекание газов через перепускную заслонку. С другой стороны, концевой упор может включать в себя положение, причем клапан перепускной заслонки полностью открыт.
В описанном выше подходе датчик выходного вала редуктора не дает указания положения клапана перепускной заслонки относительно положения седла клапана. Без знания концевого упора клапана перепускной заслонки, когда клапану перепускной заслонки дается команда в закрытое положение, положение клапана перепускной заслонки может настраиваться слишком много, побуждая клапан перепускной заслонки ударяться о седло клапана на высокой скорости. Посредством слишком большой настройки клапана перепускной заслонки могут повышаться условия шума, вибрации, неплавности хода (NVH) и износ седла клапана. В дополнение, система управления с обратной связью может прикладывать слишком большой ток к перепускной заслонке, пытаясь перемещать клапан перепускной заслонки в требуемое положение упора, которого физически невозможно достичь, приводя к высокому механическому напряжению во всей системе. С другой стороны, положение клапана перепускной заслонки может настроено несильно уплотнять седло клапана, что дает, в результате, нежелательный поток газов через перепускную заслонку, который понижает давление наддува.
Более того, клапан перепускной заслонки и множество тяг могут подвергаться высоким температурам внутри турбины, что может оказывать влияние на точность выходного сигнала датчика положения. Например, множество тяг изменяет длину по мере того, как изменяется температура. В некоторых условиях такие изменения длины могут побуждать положение концевого упора клапана перепускной заслонки достигаться раньше, чем такое положение указывается датчиком выходного вала редуктора.
Таким образом, в одном из примеров некоторые из вышеприведенных проблем могут быть по меньшей мере частично препоручены способу, содержащему: во время калибровки датчика положения перепускной заслонки: настройку клапана перепускной заслонки на первое положение концевого упора, ассоциативное связывание первого положения обратной связи с первым положением концевого упора, настройку клапана перепускной заслонки на второе положение концевого упора; ассоциативное связывание второго положения обратной связи со вторым положением концевого упора; и настройку коэффициента передачи датчика положения на основании первого положения обратной связи и второго положения обратной связи.
Посредством выявления положения концевого упора (седла клапана) клапана перепускной заслонки и обеспечения регулирования с обратной связью клапана перепускной заслонки относительно положения концевого упора точность регулирования относительно выравнивания клапана перепускной заслонки с седлом клапана для закрывания перепускной заслонки может повышаться. Таким образом, интенсивный удар между клапаном перепускной заслонки и седлом клапана будет ослабляться, и условия NVH могут уменьшаться. Более того, выявление концевого упора и соответствующая калибровка датчика положения могут повышать точность регулирования подъема перепускной заслонки, что, в свою очередь, повышает точность регулирования наддува.
Будет понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании, которое следует. Она не предполагается для идентификации ключевых или существенных признаков заявленного предмета изобретения, объем которого определен формулой изобретения, которая сопровождает подробное описание. Кроме того, заявленный предмет изобретения не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предмет настоящего раскрытия будет лучше понятен по прочтению последующего подробного описания неограничивающих вариантов осуществления со ссылкой на прилагаемые чертежи, на которых:
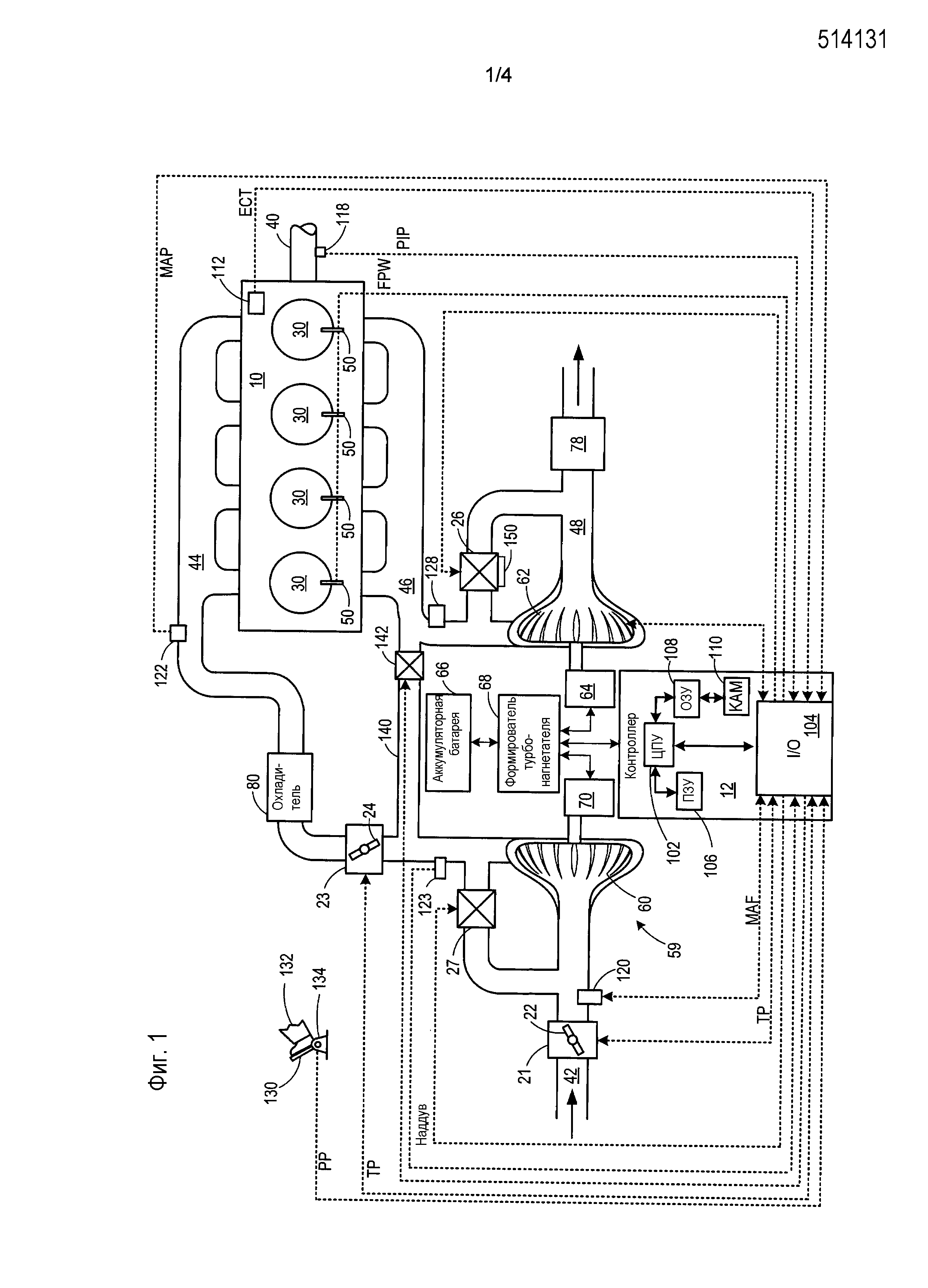
Фиг.1 показывает примерную систему двигателя, включающую в себя турбонагнетатель согласно варианту осуществления настоящего раскрытия.
Фиг.2 показывает перепускную заслонку с электроприводом, которая может быть реализована в турбонагнетателе, согласно варианту осуществления настоящего раскрытия.
Фиг.3 показывает способ для выявления положения концевого упора (седла клапана) перепускной заслонки с электроприводом согласно варианту осуществления настоящего раскрытия.
Фиг.4 показывает способ для калибровки датчика положения на основании выявленных положений (седла клапана) клапана перепускной заслонки согласно варианту осуществления настоящего раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
Предусмотрены различные системы и способы для выявления положения концевого упора клапана перепускной заслонки в турбине турбонагнетателя. Положение концевого упора клапана перепускной заслонки может включать в себя положение, причем клапан перепускной заслонки надлежащим образом выравнивается с седлом клапана, чтобы по существу предотвращать протекание газов через перепускную заслонку (например, меньшее, чем 5% полного потока). С другой стороны, положение концевого упора может включать в себя положение, где клапан перепускной заслонки полностью открыт.
В одном из примеров процедура выявления концевого упора включает в себя выдачу команды полного хода клапана перепускной заслонки из полностью открытого положения в полностью закрытое положение. Когда клапану перепускной заслонки дана команда в положение конечного упора, множество условий могут проверяться для определения, действительно ли клапан перепускной заслонки расположен в положении концевого упора. Например, множество условий может включать в себя разность между сигналом положения обратной связи клапана перепускной заслонки и сигналом командного положения клапана перепускной заслонки, являющуюся большей, чем предопределенное пороговое значение в состоянии установившегося режима; скорость электродвигателя, являющуюся меньшей, чем пороговая скорость (например, по существу нулевая); и значение сигнала положения обратной связи клапана перепускной заслонки, находящееся между верхним пороговым значением, которое указывает, что достигнуто положение конечного упора, и нижним пороговым значением, которое указывает командный сигнал для закрывания клапана перепускной заслонки. Если все эти условия удовлетворены, то клапан перепускной заслонки может указываться находящимся в положении конечного упора. Показания датчика положения клапана перепускной заслонки в течение этого времени дают соответствующее напряжение, которое может ассоциативно связываться с конкретным положением конечного упора, если удовлетворены условия.
Выявление концевого упора может использоваться в стратегии калибровки датчика положения клапана перепускной заслонки. Стратегия калибровки датчика положения клапана перепускной заслонки может выполняться на всем протяжении работы двигателя, чтобы адаптироваться к физическим изменениям привода перепускной заслонки по мере того, как меняются условия эксплуатации. В частности, так как привод перепускной заслонки может подвергаться воздействию высоких температур в пределах турбонагнетателя, множество тяг, присоединяющих клапан перепускной заслонки к электродвигателю, может изменять длину, и такие изменения длины могут оказывать влияние на точность датчика положения. По существу, стратегия калибровки датчика положения может выполняться на всем протяжении работы, чтобы поддерживать точность выходного сигнала датчика положения клапана перепускной заслонки.
Более того, поскольку выявление концевого упора требует, чтобы клапан перепускной заслонки настраивался полным ходом между закрытым положением и открытым положением, такое выявление концевого упора может быть вмешивающимся в работу в некоторых условиях. Соответственно, процедура выявления концевого упора может выполняться во время конкретных условий эксплуатации, причем полный ход клапана перепускной заслонки может иметь небольшое или никакого влияния на работу двигателя.
Фиг.1 - принципиальная схема, показывающая примерный двигатель 10, который может быть включен в силовую установку автомобиля. Двигатель 10 показан с четырьмя цилиндрами 30. Однако другие количества цилиндров могут использоваться в соответствии с данным раскрытием. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Каждая камера 30 сгорания (например, цилиндр) двигателя 10 может включать в себя стенки камеры сгорания с поршнем (не показан), расположенные в них. Поршни могут быть присоединены к коленчатому валу 40 так, чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии. Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10.
Камеры 30 сгорания могут принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42 и могут выпускать отработавшие газы через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут избирательно сообщаться с камерой 30 сгорания через соответственные впускные клапаны и выпускные клапаны. В некоторых вариантах осуществления камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Топливные форсунки 50 показаны присоединенными непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12. Таким образом, топливная форсунка 50 обеспечивает то, что известно в качестве непосредственного впрыска топлива в камеру 30 сгорания. Топливная форсунка, например, может быть установлена сбоку камеры сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 50 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива. В некоторых вариантах осуществления камеры 30 сгорания, в качестве альтернативы или дополнительно, могут включать в себя топливную форсунку, скомпонованную во впускном коллекторе 44, в конфигурации, которая предусматривает то, что известно как оконный впрыск топлива во впускное окно выше по потоку от каждой камеры 30 сгорания.
Впускной канал 42 может включать в себя дроссель 21 и 23, имеющий дроссельные заслонки 22 и 24, соответственно. В этом конкретном примере положение дроссельных заслонок 22 и 24 может регулироваться контроллером 12 посредством сигналов, выдаваемых на привод, включенный в состав дросселями 21 и 23. В одном из примеров приводы могут быть электрическими приводами (например, электродвигателями), конфигурацией, которая обычно указывается ссылкой как электронный регулятор дросселя (ETC). Таким образом, заслонки 21 и 23 могут приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, между другими цилиндрами двигателя. Положение дроссельных заслонок 22 и 24 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канал 42, кроме того, может включать в себя датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для выдачи соответственных сигналов MAF (массового расхода воздуха) и MAP (давления воздуха в коллекторе) в контроллер 12. В некоторых вариантах осуществления один или более дросселей могут быть опущены.
Выпускной канал 48 может принимать отработавшие газы из цилиндров 30. Датчик 128 отработавших газов показан присоединенным к выпускному каналу 48 выше по потоку от турбины 62 и устройства 78 снижения токсичности выбросов. Датчик 128 может быть выбран из числа различных пригодных датчиков для выдачи показания топливо/воздушного соотношения в отработавших газах, например, таких как линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный кислородный датчик или EGO, датчик NOx, HC или CO. Устройство 78 снижения токсичности выбросов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности выбросов или их комбинациями.
В некоторых вариантах осуществления датчик 128 может включать в себя датчик температуры отработавших газов, выполненный с возможностью измерять температуру отработавших газов в выпускном канале 48. В качестве альтернативы, температура отработавших газов может логически выводиться на основании условий эксплуатации двигателя, таких как число оборотов, нагрузка, топливо-воздушное соотношение (AFR), запаздывание искрового зажигания и т.д.
Контроллер 12 показан на Фиг.1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель (или запоминающий механизм, запоминающее устройство и т. д.) для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, дежурную память 110 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ECT) с датчика 112 температуры, схематически показанного в одном месте в пределах двигателя 10; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя, как обсуждено; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122, как обсуждено. Сигнал числа оборотов двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе 44. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время стехиометрической работы датчик MAP может давать показание крутящего момента двигателя. Кроме того, этот датчик, наряду с выявленным числом оборотов двигателя, может давать оценку заряда (включающего в себя воздух), введенного в цилиндр. В одном из примеров датчик 118, который также используется в качестве датчика числа оборотов двигателя, может вырабатывать предопределенное количество равноразнесенных импульсов каждый оборот коленчатого вала 40. В некоторых примерах постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
Двигатель 10 дополнительно может включать в себя турбонагнетатель 59, включающий в себя по меньшей мере компрессор 60, скомпонованный вдоль впускного коллектора 44. Компрессор 60 может по меньшей мере частично приводиться в действие турбиной 62, например, через вал или другое соединительное устройство. Турбина 62 может быть скомпонована вдоль выпускного канала 48. Различные компоновки могут быть предусмотрены для осуществления привода компрессора. Величина сжатия, обеспечиваемого для одного или более цилиндров двигателя с помощью турбонагнетателя, может регулироваться контроллером 12. В некоторых случаях турбина 62, например, может приводить в движение электрогенератор 64 для выдачи энергии в аккумуляторную батарею 66 через приводной механизм 68 турбонагнетателя. Энергия из аккумуляторной батареи 66 затем может использоваться для приведения в движение компрессора 60 с помощью электродвигателя 70. Кроме того, датчик 123 может быть размещен во впускном коллекторе 44 для выдачи сигнала BOOST (НАДДУВ) в контроллер 12, который является указывающим уровень наддува турбонагнетателя.
Кроме того, выпускной канал 48 может включать в себя перепускную заслонку 26 для отведения отработавших газов в сторону от турбины 62. В некоторых вариантах осуществления перепускная заслонка может быть многокаскадной перепускной заслонкой, такой как двухкаскадная перепускная заслонка с первым каскадом, выполненным с возможностью регулировать давление наддува, и вторым каскадом, выполненным с возможностью увеличивать тепловой поток в устройство 78 снижения токсичности выбросов. Перепускная заслонка 26 может приводиться в действие с помощью привода 150, который, например, может быть электрическим приводом. В некоторых вариантах осуществления привод 150 может быть электродвигателем, который может управляться контроллером 12 для настройки положения перепускной заслонки. Дополнительные подробности касательно перепускной заслонки 26 и привода 150 будут подробнее обсуждены ниже со ссылкой на Фиг.2.
Впускной канал 42 может включать в себя перепускной клапан 27 компрессора, выполненный с возможностью отводить всасываемый воздух вокруг компрессора 60. Перепускная заслонка 26 и/или перепускной клапан 27 компрессора могут управляться контроллером 12 через исполнительные механизмы (например, привод 150), например, чтобы открываться, когда требуется более низкое давление наддува.
Впускной канал 42 может дополнительно включать в себя охладитель 80 наддувочного воздуха (CAC) (например, промежуточный охладитель) для понижения температуры нагнетаемых турбонагнетателем или нагнетателем всасываемых газов. В некоторых вариантах осуществления охладитель 80 наддувочного воздуха может быть воздушно-воздушным теплообменником. В других вариантах осуществления охладитель 80 наддувочного воздуха может быть воздушно-жидкостным теплообменником.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции отработавших газов (EGR) может направлять требуемую порцию отработавших газов из выпускного канала 48 во впускной канал 42 через канал 140 EGR. Количество EGR, выдаваемой во впускной канал 42, может регулироваться контроллером 12 посредством клапана 142 EGR. Кроме того, датчик EGR может быть скомпонован внутри канала EGR и может выдавать показание одного или более из давления, температуры, концентрации отработавших газов. В качестве альтернативы, EGR может управляться посредством расчетного значения, основанного на сигналах с датчика MAF (выше по потоку), MAP (впускного коллектора), MAT (температуры газа в коллекторе) и датчика частоты вращения коленчатого вала. Кроме того, EGR может управляться на основании датчика O2 отработавших газов и/или кислородного датчика на впуске (впускного коллектора). В некоторых условиях система EGR может использоваться для регулирования температуры смеси воздуха и топлива в пределах камеры сгорания. Фиг.1 показывает систему EGR высокого давления, причем EGR направляется из выше по потоку от турбины турбонагнетателя в ниже по потоку от компрессора турбонагнетателя. В других вариантах осуществления двигатель, дополнительно или в качестве альтернативы, может включать в себя систему EGR низкого давления, причем EGR направляется из ниже по потоку от турбины турбонагнетателя в выше по потоку от компрессора турбонагнетателя.
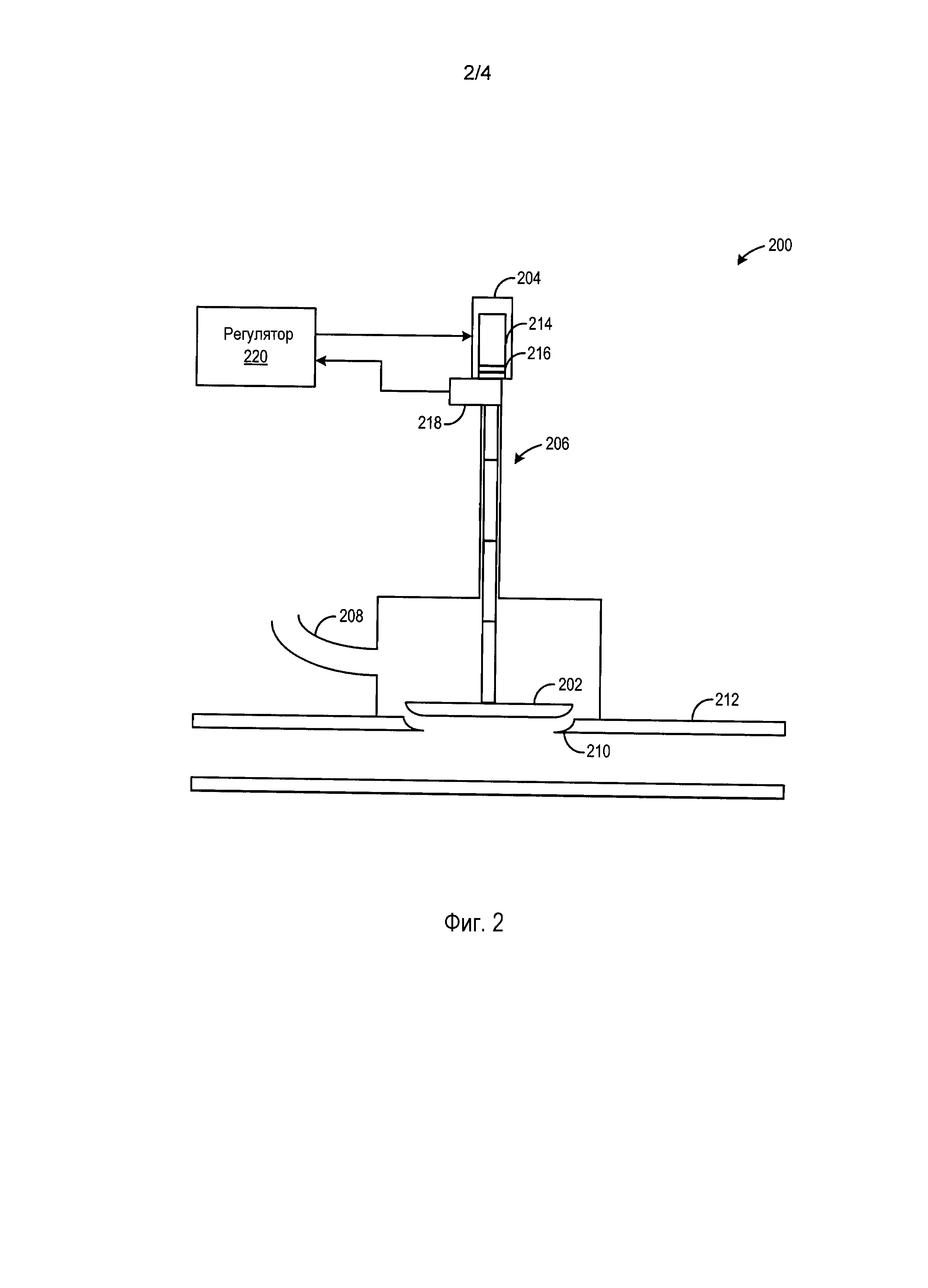
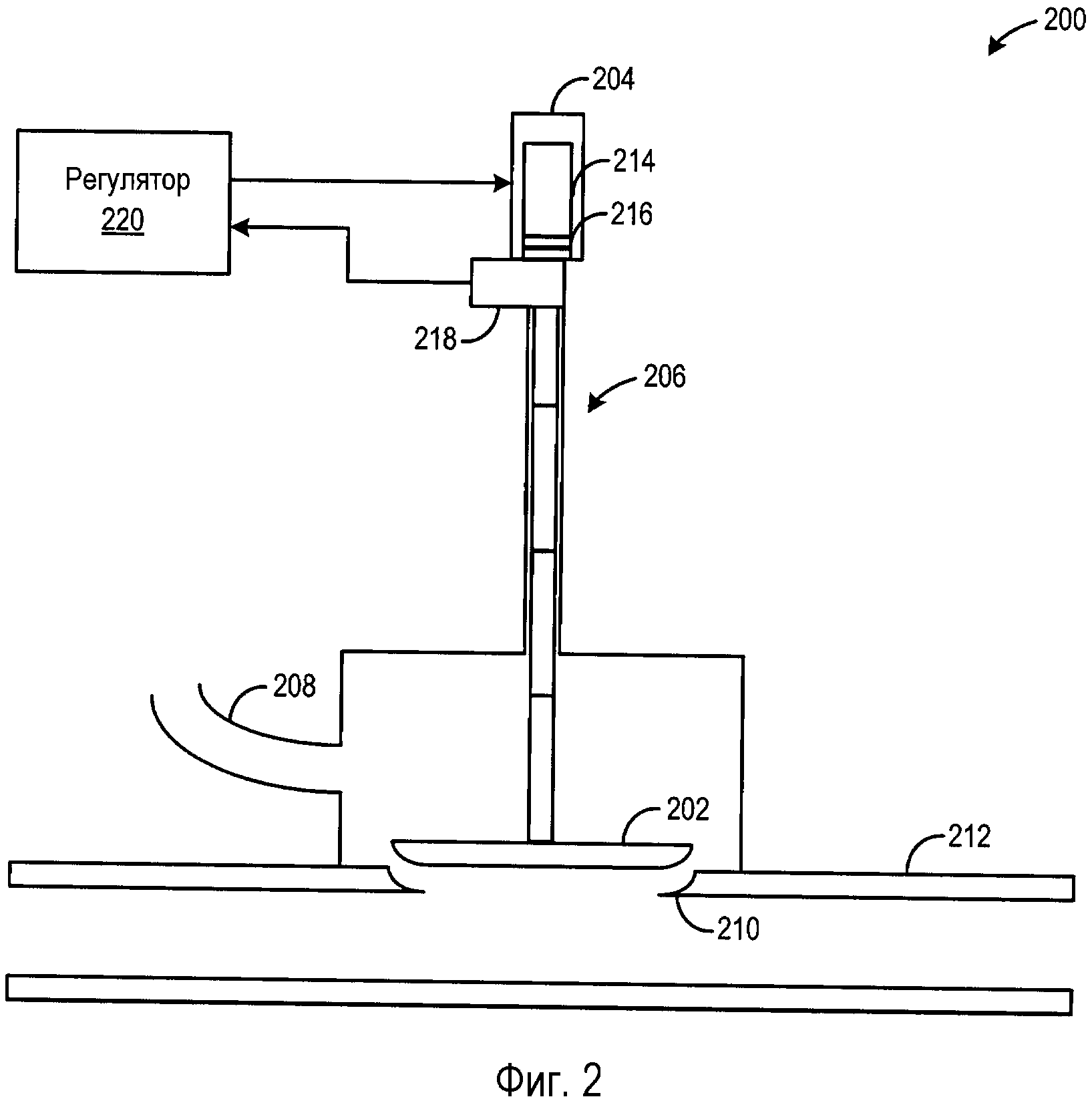
Фиг.2 показывает перепускную заслонку 200 с электроприводом, которая может быть реализована в турбонагнетателе, согласно варианту осуществления настоящего раскрытия. Например, перепускная заслонка 200 может быть реализована в качестве перепускной заслонки 26, показанной на Фиг.1. Перепускная заслонка 200 может включать в себя клапан 202 перепускной заслонки, который может приводиться в действие приводом 204 перепускной заслонки через множество тяг 206. В проиллюстрированном варианте осуществления перепускная заслонка 200 является электрической перепускной заслонкой, а привод 204 перепускной заслонки включает в себя электродвигатель 214. Электродвигатель 214 передает движущую силу на клапан 202 перепускной заслонки через множество тяг 206, чтобы переключать клапан перепускной заслонки между полностью закрытым положением и полностью открытым положением (например, положениями концевых упоров) и любым положением между ними. Причем в полностью закрытом положении, клапан 202 перепускной заслонки может выравниваться с седлом 210 клапана, чтобы по существу предотвращать протекание отработавших газов через перепускную заслонку 200. С другой стороны, перепускная заслонка 200 включает в себя вентиляционный канал 208, который может принимать отработавшие газы из выпускного коллектора 212, когда клапан 202 перепускной заслонки не находится в полностью закрытом положении, так что клапан перепускной заслонки выровнен с седлом клапана. Таким образом, величина наддува, подаваемого в двигатель, может регулироваться, по меньшей мере частично, посредством приведения в действие клапана 202 перепускной заслонки с помощью привода 214, тем самым изменяя положение клапана 202 перепускной заслонки и количество газа, достигающего впускного коллектора.
Привод 204 перепускной заслонки может включать в себя электродвигатель 214 и выходной редуктор 216, который передает мощность с электродвигателя 214 на множество тяг 206. Множество тяг 206 может предоставлять приводу 204 перепускной заслонки возможность располагаться удаленно от клапана 202 перепускной заслонки и выпускного коллектора 212 так, чтобы привод перепускной заслонки мог подвергаться воздействию меньшего тепла, чем клапан перепускной заслонки. Множество тяг может передавать выходную мощность с электродвигателя любым пригодным образом, чтобы настраивать положение клапана перепускной заслонки. Посредством расположения привода перепускной заслонки на отдалении от выпускного коллектора может понижаться вероятность ухудшения характеристик, обусловленного подверганием воздействию тепла.
В некоторых вариантах осуществлении перепускная заслонка 200 дополнительно включает в себя смещающий элемент. Смещающий элемент может выбираться, чтобы подавать закрывающее усилие, которое поддерживает клапан 202 перепускной заслонки в полностью закрытом положении вплоть до порогового давления. Ток, подаваемый на привод перепускной заслонки, может выбираться, чтобы учитывать закрывающее усилие смещающего элемента, такого как пружина. Будет принято во внимание, что различные пригодные конструкции могут использоваться для подачи смещения или дополнительного закрывающего усилия на клапан 202 перепускной заслонки. В случае, где применяется пружина, динамическая жесткость может выбираться, чтобы подводить закрывающее усилие вплоть до конкретного порогового давления и подавать достаточный наддув в двигатель.
Датчик 218 положения перепускной заслонки может быть присоединен к приводу 204 перепускной заслонки, чтобы выдавать указание положения клапана 202 перепускной заслонки. Например, датчик 218 положения может измерять угол поворота выходной зубчатой передачи 216 электродвигателя 214, который соответствует положению клапана 202 перепускной заслонки. В частности, электродвигатель 214 может иметь поворотную длину перемещения, которая соответствует рабочему диапазону клапана 202 перепускной заслонки. Датчик 218 положения может выдавать указание положения клапана перепускной заслонки в контроллер 220.
Регулятор 220 может быть выполнен с возможностью управлять работой электродвигателя 214, чтобы настраивать клапан 202 перепускной заслонки, тем самым регулируя уровень наддува, выдаваемый турбонагнетателем двигателя. В одном из примеров, регулятор 220 соответствует контроллеру 12, показанному на Фиг.1. Конкретнее, контроллер 220 может быть выполнен с возможностью настраивать положение клапана 202 перепускной заслонки на основании обратной связи с датчика 218 положения относительно определенного положения концевого упора клапана перепускной заслонки.
В одном из примеров контроллер 220 может быть выполнен с возможностью выполнять процедуру выявления концевого упора для определения положений концевого упора клапана 202 перепускной заслонки. В частности, контроллер 220 может быть выполнен с возможностью давать команду полного хода клапана 202 перепускной заслонки из полностью открытого положения в полностью закрытое положение посредством управления электродвигателем 214, для того, чтобы определять соответствующее положение концевого упора на каждом конце хода. Когда клапану 202 перепускной заслонки дается команда в конец хода, проверяются следующие условия: определяется, находится ли разность между сигналом положения обратной связи клапана перепускной заслонки и сигналом командного положения выше предопределенного порогового значения, в то время как сигналы находятся в состоянии установившегося режима (например, сигналы указывают, что клапан перепускной заслонки находится в конце хода); определяется, что скорость привода 204 перепускной заслонки находится ниже предопределенного порогового значения (например, по существу нулевого); и токовый сигнал, соответствующий командному положению, находится между предопределенными пороговыми уровнями. Например, верхний уровень может указывать, что достигнуто положение концевого упора, среди прочих условий. Нижний уровень может указывать минимальный уровень, на котором перепускная заслонка 200 полностью закрыта, так что клапан 202 перепускной заслонки выровнен с совместимой конструкцией седла 210 клапана. Если все эти условия удовлетворены, то клапан перепускной заслонки объявляется находящимся в положении концевого упора, и контроллер 220 может устанавливать показания напряжения датчика положения во время интервала выявления концевого упора в качестве напряжения, соответствующего конкретному положению концевого упора.
В некоторых вариантах осуществления во время интервала выявления концевого упора показания сигнала датчика положения (за исключением сигнала командного положения) могут фильтроваться из условия, чтобы среднее значение получалось на основании расчета интеграла на интервале в течение предопределенного временного интервала, который может давать напряжение для конкретного положения концевого упора.
Контроллер 220 может быть выполнен с возможностью повторять последовательность калибровки датчика положения на всем протяжении работы для поддержания точности регулирования клапана перепускной заслонки по мере того, как изменяются условия эксплуатации. Например, калибровка может выполняться часто, так как перепускная заслонка может подвергаться воздействию высоких температур внутри турбонагнетателя, которые могут оказывать влияние на точность выходного сигнала датчика положения. В дополнение, электродвигатель перепускной заслонки может вырабатывать тепло, которое оказывает влияние на точность датчика положения.
В некоторых вариантах осуществления контроллер 220 может быть выполнен с возможностью выполнять процедуру калибровки датчика положения с назначенным временным интервалом. В некоторых вариантах осуществления контроллер 220 может быть выполнен с возможностью выполнять процедуру калибровки датчика положения во время условий, причем подача команды полного хода клапана перепускной заслонки не мешает работе турбонагнетателя. В частности, поскольку процедура калибровки датчика положения может быть вмешивающейся в работу турбонагнетателя, может быть желательно выполнять процедуру во время условий, причем вмешательство в работу турбонагнетателя может не ухудшать ездовые качества транспортного средства. Например, контроллер 220 может быть выполнен с возможностью выполнять процедуру калибровки датчика положения перепускной заслонки во время условий холостого хода двигателя. Конкретнее, процедура калибровки может выполняться во время условий холостого хода двигателя, когда нет указания входного сигнала водителя транспортного средства по ускорению транспортного средства, который повышал бы уровень давления турбонагнетателя. В одном из примеров процедура калибровки может выполняться во время условий холостого хода при пуске двигателя.
В еще одном примере процедура калибровки может выполняться во время условий перекрытия топлива при замедлении (DFSO). Например, условия DFSO могут возникать во время движения транспортного средства накатом, когда впрыск топлива перекрыт, дроссель закрыт, и двигатель работает быстрее, чем число оборотов холостого хода. Условия DFSO могут возникать на разных числах оборотов двигателя. Процедура калибровки может выполняться во время условий DFSO, так как нет неизбежного использования для давления турбонагнетателя, так как транспортное средство является замедляющимся. Соответственно, открывание перепускной заслонки для выполнения процедуры калибровки может не затрагивать ездовые качества транспортного средства во время условий DFSO.
Будет принято во внимание, что контроллер 220 может быть выполнен с возможностью выявлять любое пригодное состояние, которое не затрагивает ездовых качеств транспортного средства, для выполнения процедуры калибровки, не выходя из объема настоящего раскрытия.
Однако будет принято во внимание, что различные пригодные устройства перепускной заслонки могут использоваться, не выходя из объема настоящего раскрытия, и, например, могут зависеть от механических ограничений конструкции и компоновки.
Конфигурации, проиллюстрированные выше, дают возможность различных способов для выявления положений концевого упора клапана перепускной заслонки и калибровки датчика положения на основании выявленных положений концевого упора. Соответственно, некоторые такие способы описаны далее, в качестве примера, с непрерывной ссылкой на вышеприведенные конфигурации. Однако будет понятно, что эти способы и другие, полностью находящиеся в пределах объема настоящего раскрытия, также могут быть задействованы посредством других конфигураций.
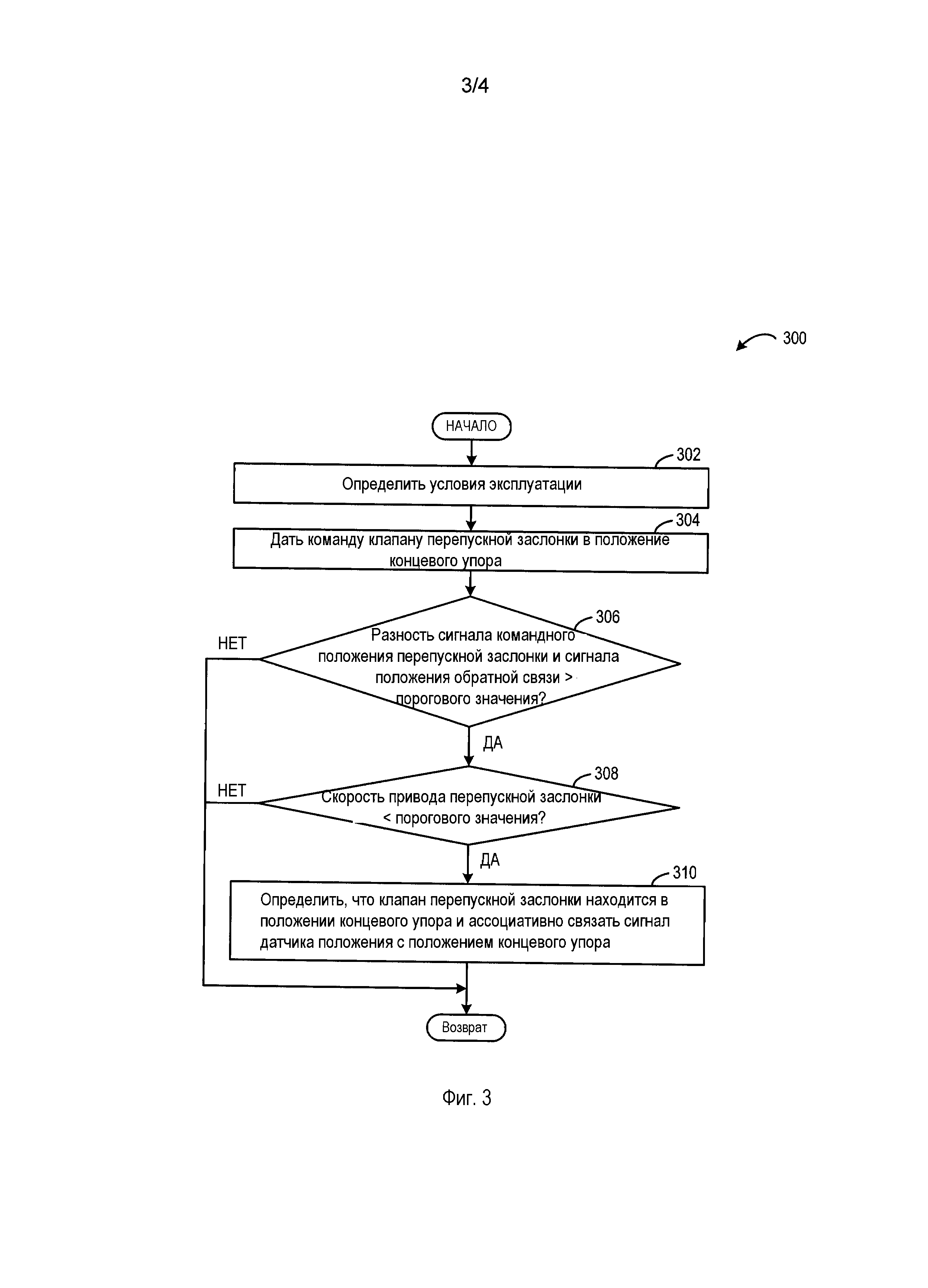
Фиг.3 показывает способ 300 для выявления положения концевого упора клапана перепускной заслонки с электроприводом согласно варианту осуществления настоящего раскрытия. Например, способ может выполняться контроллером 12 по Фиг.1 или регулятором 220 по Фиг.2. На 302 способ 300 может включать в себя определение условий эксплуатации. Например, определение условий эксплуатации может включать в себя прием сигналов датчика, которые являются указывающими рабочие параметры транспортного средства, и расчет или логический вывод различных рабочих параметров. Кроме того, определение условий эксплуатации может включать в себя определение состояния компонентов или исполнительных механизмов транспортного средства. В одном из примеров рабочие параметры, которые могут определяться, включают в сея число оборотов двигателя, давление турбонагнетателя, положение клапана перепускной заслонки (например, напряжение), скорость привода перепускной заслонки и т. д.
На 304 способ 300 может включать в себя подачу команды на клапан перепускной заслонки в положение концевого упора. Например, команда может выполняться посредством управления электродвигателем, присоединенным к клапану перепускной заслонки. В одном из конкретных примеров подача команды включает в себя выдачу команды полного хода клапана перепускной заслонки из полностью открытого положения в полностью закрытое положение.
На 306, способ 300 может включать в себя определение, является ли разность между командным сигналом клапана перепускной заслонки и сигналом положения обратной связи большим, чем предопределенное пороговое значение, в то время как сигналы находятся в состоянии установившегося режима. Например, сигнал положения обратной связи может выдаваться датчиком положения, таким как датчик 218, показанный на Фиг.2. Определение может выполняться для проверки, что клапан перепускной заслонки действительно перемещался в командное положение. Если разность между командным сигналом и сигналом положения обратной связи является большей, чем предопределенное пороговое значение, в то время как сигналы находятся в состоянии установившегося режима, то способ 300 переходит на 308. Иначе, способ 300 возвращается на другие операции.
На 308, способ 300 может включать в себя определение, является ли скорость привода перепускной заслонки меньшей, чем пороговое значение скорости. Например, пороговое значение скорости может быть по существу нулевым или едва большим, чем ноль. В одном из примеров определенная скорость может быть у электродвигателя 214, показанного на Фиг.2. Определение может выполняться для проверки, находится ли клапан перепускной заслонки в положении установившегося состояния. Если скорость привода перепускной заслонки является меньшей, чем пороговое значение скорости, то способ 300 переходит на 310. Иначе, способ 300 возвращается на другие операции.
На 310, если все эти условия удовлетворены, то клапан перепускной заслонки определяется находящимся в положении концевого упора, а сигнал обратной связи датчика положения ассоциативно связывается с положением концевого упора. В некоторых вариантах осуществления, в течение времени в положении концевого упора, все сигналы обратной связи могут фильтроваться из условия, чтобы среднее значение получалось на основании расчета интеграла на интервале в течение испытательного периода или предопределенного временного интервала. Среднее значение показаний датчика в течение этого времени дает уровень сигнала датчика (например, напряжение), который ассоциативно связан с этим конкретным положением концевого упора.
Как только определено положение концевого упора, способ может повторяться, чтобы определять другое положение концевого упора. В частности, клапану перепускной заслонки может даваться команда в другое положение концевого упора, и последовательности могут повторяться, а после того, как клапан перепускной заслонки объявлен находящимся в другом положении концевого упора, показание датчика положения может ассоциативно связываться с новым сигналом датчика положения для другого положения концевого упора. Эта процедура выявления концевого упора может выполняться с предопределенными временными интервалами. Время, потраченное в каждом положении концевого упора (например, верхнем и нижнем), может быть настраиваемым.
Вышеприведенный способ может выполняться для определения положения концевого упора клапана перепускной заслонки. Определенное положение концевого упора может использоваться в стратегии калибровки датчика положения, описанной в материалах настоящей заявки.
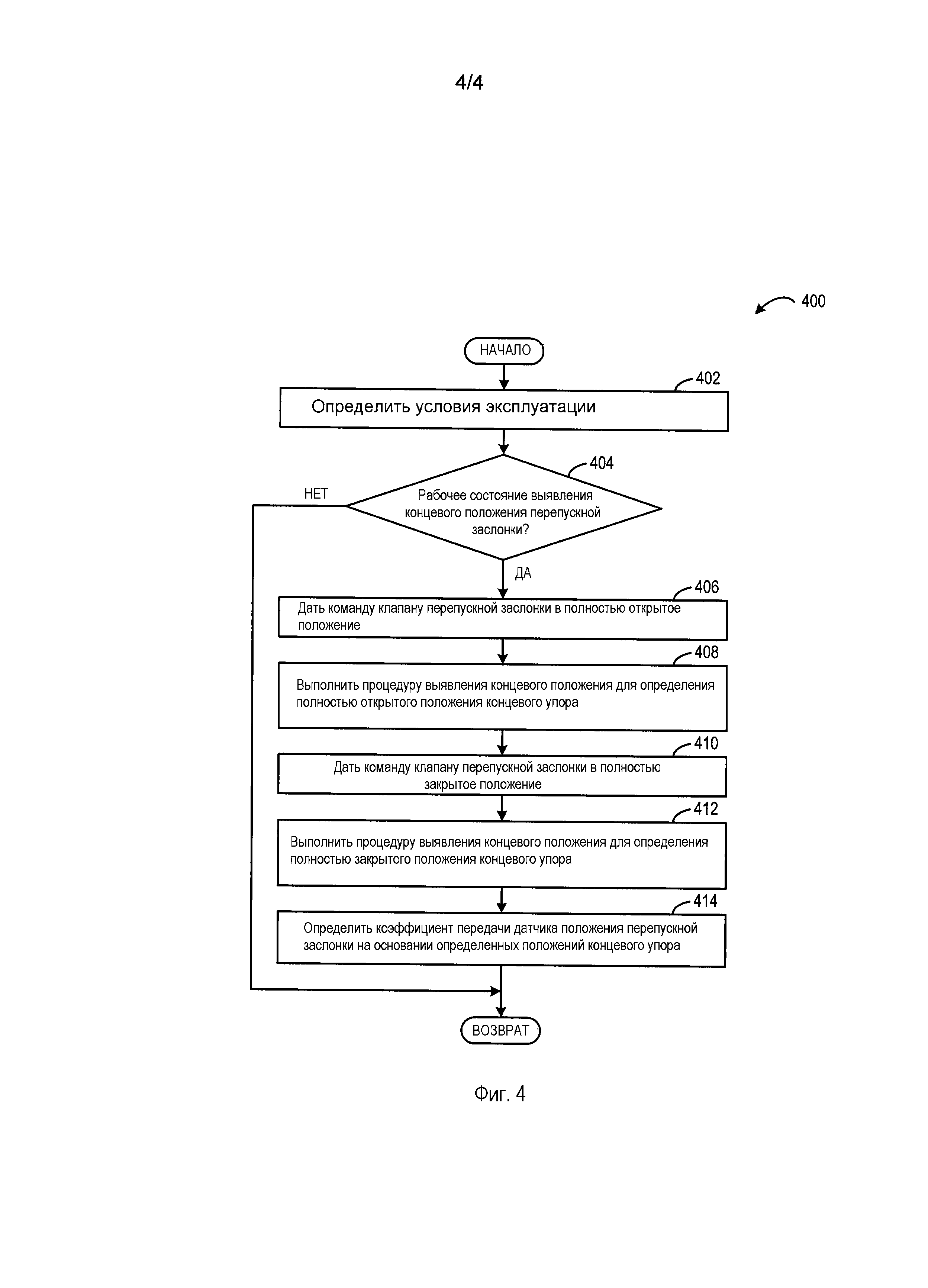
Фиг.4 показывает способ для калибровки датчика положения на основании выявленных положений концевых упоров клапана перепускной заслонки согласно варианту осуществления настоящего раскрытия. Например, способ может выполняться контроллером 12 по Фиг.1 или регулятором 220 по Фиг.2. На 402, способ 400 может включать в себя определение условий эксплуатации.
На 404, способ 400 может включать в себя определение, пригодны ли условия эксплуатации для выполнения выявления концевого упора и калибровки датчика положения. Как обсуждено выше, процедура выявления концевого упора может быть вмешивающейся операцией в некоторых условиях, так как дается команда полного хода клапана перепускной заслонки, для того, чтобы определять положения концевого упора на каждом конце хода. Соответственно, может определяться, пригодны ли условия эксплуатации для подачи команды полного хода клапана перепускной заслонки, не мешая или с минимальной помехой ездовым качествам транспортного средства.
Например, подходящие условия эксплуатации включают в себя условия холостого хода двигателя. Конкретнее, процедура калибровки может выполняться во время условий холостого хода двигателя, когда нет указания ускорения транспортного средства от водителя транспортного средства, который повышал бы уровень давления турбонагнетателя. В одном из примеров процедура калибровки может выполняться во время условий холостого хода при пуске двигателя. В еще одном примере процедура калибровки может выполняться во время условий, причем перепускная заслонка открыта для понижения уровня давления турбонагнетателя. В еще одном примере процедура калибровки может выполняться во время условий перекрытия топлива при замедлении (DFSO). Будет принято во внимание, что любое подходящее состояние, которое не затрагивает ездовые качества транспортного средства, может определяться для выполнения процедуры калибровки, не выходя из объема настоящего раскрытия. Если определено, что условия эксплуатации пригодны для выполнения калибровки датчика положения, то способ 400 переходит на 406. Иначе, способ 400 возвращается на другие операции.
На 406, способ 400 может включать в себя подачу команды клапану перепускной заслонки в полностью открытое положение.
На 408, способ 400 может включать в себя выполнение процедуры выявления концевого положения для определения полностью открытого положения концевого упора клапана перепускной заслонки. Положение концевого упора может ассоциативно связываться с напряжением сигнала датчика положения в результате выполнения процедуры выявления концевого положения. Например, процедура обнаружения концевых упоров, которая может выполняться, может включать в себя способ 300, показанный на Фиг.3.
На 410, способ 400 может включать в себя подачу команды клапану перепускной заслонки в полностью закрытое положение. Другими словами, может выполняться полный ход клапана перепускной заслонки.
На 412, способ 400 может включать в себя выполнение процедуры выявления концевого положения для определения полностью закрытого положения концевого упора клапана перепускной заслонки. Положение концевого упора может ассоциативно связываться с напряжением сигнала датчика положения в результате выполнения процедуры выявления концевого положения. Например, процедура обнаружения концевых упоров, которая может выполняться, может включать в себя способ 300, показанный на Фиг.3. Будет принято во внимание, что очередность, в которой выявляются положения концевого упора, может быть изменена, не выходя из объема настоящего раскрытия.
На 414, способ 400 может включать в себя определение коэффициента передачи датчика положения перепускной заслонки на основании определенных положений концевого упора. В частности, оба показания напряжения датчика положений концевого упора могут использоваться для расчета нового коэффициента передачи датчика для настройки клапана перепускной заслонки между положениями концевого упора.
В некоторых вариантах осуществления последовательность калибровки датчика может повторяться с предопределенными временными интервалами, чтобы поддерживать калибровку датчика положения перепускной заслонки. В некоторых вариантах осуществления последовательность калибровки датчика может повторяться, когда рабочая температура изменяется достаточно, чтобы оказывать влияние на физические характеристики компонентов перепускной заслонки. Соответственно, точное управление перепускной заслонкой может поддерживаться на всем протяжении работы транспортного средства, даже в то время как компоненты перепускной заслонки подвергаются физическим изменениям, обусловленным изменениями условий эксплуатации (например, расширению тяг вследствие подвергания воздействию тепла).
Будет понятно, что примерные процедуры управления и оценки, раскрытые в материалах настоящей заявки, могут использоваться с различными конфигурациями системы. Эти процедуры могут представлять одну или более разных стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная и тому подобная. По существу, раскрытые этапы (операции, функции и/или действия) обработки могут представлять собой управляющую программу, которая должна быть запрограммирована на машинно-читаемом запоминающем носителе в электронной системе управления.
Будет понятно, что некоторые этапы обработки, описанные и/или проиллюстрированные в материалах настоящей заявки, в некоторых вариантах осуществления, могут быть опущены, не выходя из объема этого раскрытия. Подобным образом, указанная последовательность этапов последовательностей операций не всегда может требоваться для достижения намеченных результатов, но предоставлена для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, функций или операций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии.
В заключение, будет понятно, что изделия, системы и способы, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления или примеры не должны рассматриваться в ограничительном смысле, так как предполагаются многочисленные варианты. Соответственно, настоящее раскрытие включает в себя новейшие и неочевидные комбинации и подкомбинации различных систем и способов, раскрытых в материалах настоящей заявки, а также любые и все их эквиваленты.
Узел блока цилиндров (варианты)
Способ эксплуатации двигателя (варианты)
Способ восстановления устройства последующей очистки выхлопных газов (варианты) и система двигателя
Блок цилиндров (варианты)
Способ управления транспортным средством, способ управления двигателем (варианты)
Способ управления двигателем (варианты) и система двигателя
Способ работы двигателя, способ для двигателя и система двигателя
Транспортное средство с управляемым впрыском топлива
Способ останова транспортного средства (варианты) и система останова транспортного средства
Система для головки блока цилиндров, узел индивидуальной катушки на свече зажигания для двигателя внутреннего сгорания и система двигателя
Связывающие белки и способы их применения

