Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О МЕСТОНАХОЖДЕНИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретения
Настоящее изобретение относится к области мобильной связи и в частности к способу и устройству получения информации о местоположении.
Уровень техники
По мере развития технологий связи все шире используется сервис определения местоположения терминалов. Когда пользователь запрашивает сервис определения местоположения, серверу нужно получить информацию о местоположении терминала, соответствующего пользователю, и передать полученную информацию о местоположении этому терминалу, соответствующему этому пользователю. Например, путевая навигация является сервисом определения местоположения, так что когда пользователь запрашивает путевую навигацию, серверу нужно получить информацию о местоположении терминала, соответствующего пользователю, и передать полученную информацию о местоположении этому терминалу, соответствующему пользователю.
На сегодня известен способ получения информацию о местоположении, содержащий: передачу терминалом, местоположение которого нужно определить, зондирующего опорного сигнала и идентификатора терминала нескольким базовым станциям, в зоне действия каковых находится этот терминал, местоположение которого нужно определить; после приема зондирующего опорного сигнала и идентификатора терминала, переданных рассматриваемым терминалом, вычисление по отдельности всеми базовыми станциями из множества указанных базовых станций соответствующих характеристик (признаков) сигнала согласно зондирующему опорному сигналу, где совокупность таких характеристик сигнала содержит по меньшей мере идентификатор базовой станции, величину мощности сигнала и указание момента времени передачи сигнала; передачу всеми базовыми станциями найденных ими соответствующих характеристик сигналов и идентификатора терминала серверу позиционирования; и прием этим сервером позиционирования характеристик сигналов и идентификатора терминала, переданных всеми этими базовыми станциями, объединение всех принятых характеристик сигналов в набор характеристик сигналов, получение согласно этому набору характеристик сигналов и на основе соответствия между набором характеристик сигналов и информации о местоположении, соответствующей информации о местоположении, и затем передача этой полученной информации о местоположении терминалу согласно идентификатору этого терминала.
Прежде получения информации о местоположении, соответствие между набором характеристик сигнала и информацией о местоположении сначала сохраняют на сервере позиционирования путем выполнения следующих операций: Специалист в рассматриваемой области разбивает всю зону действия радиосвязи на несколько участков одинакового размера и определяет информацию о местоположении, соответствующую каждому участку; затем специалист в этой области помещает в каждый из этих участков измерительный терминал и передает, с использованием этого измерительного терминала, зондирующий опорный сигнал нескольким базовым станциям, в зоне действия которых находится этот измерительный терминал; все базовые станции в этом множестве базовых станций получают соответствующие им характеристики сигнала согласно принятому зондирующему опорному сигналу; все эти базовые станции передают соответствующие им характеристики сигнала серверу позиционирования; и сервер позиционирования принимает характеристики сигналов, переданные всеми базовыми станциями, объединяет все принятые характеристики сигналов в единый набор характеристик сигналов, соответствующий рассматриваемому участку, и сохраняет этот набор характеристик сигналов, соответствующий рассматриваемому участку, и информацию о местоположении для этого участка, установив соответствие между набором характеристик и информацией о местоположении. Аналогично этому, для каждого из прочих участков набор характеристик сигналов и информация о местоположении, соответствующие каждому из этих участков, могут быть сохранены на сервере позиционирования с использованием следующих операций.
В процессе осуществления настоящего изобретения оказалось, что известным техническим решениям присущ по меньшей мере следующий недостаток.
Величина мощности сигнала, входящая в состав характеристик сигнала, связана с мощностью передач терминала. Поскольку мощности передач измерительного терминала и терминала, местоположение которого нужно определить, отличаются одна от другой, характеристики сигнала, соответствующие зондирующему опорному сигналу, переданному терминалом, местоположение которого нужно определить, и характеристики сигнала, соответствующие зондирующему опорному сигналу, переданному измерительным терминалом, в высшей степени различны. Поэтому в получаемой информации о местоположении имеет место очень большая погрешность, когда такую информацию о местоположении получают на основе характеристик сигнала, соответствующих зондирующему опорному сигналу, переданному терминалом, местоположение которого нужно определить.
Раскрытие сущности изобретения
Для уменьшения погрешности в получаемой информации о местоположении, настоящее изобретение предлагает способ и устройство получения информации о местоположении.
Технические решения имеют следующий вид.
Согласно первому аспекту предложено устройство получения информации о местоположении, содержащее:
первый модуль приема для приема характеристик сигналов и идентификатора терминала, местоположение которого нужно определить, передаваемых всеми базовыми станциями из множества базовых станций, где характеристики сигнала от базовой станции содержат величину мощности сигнала и дополнительные характеристики, при этом указанные дополнительные характеристики содержат по меньшей мере идентификатор базовой станции и время передачи сигнала;
первый модуль определения для определения набора величин относительных мощностей на основе величин мощностей сигналов, передаваемых указанным множеством базовых станций, причем набор относительных величин мощностей содержит относительную величину мощности сигналов между сигналами от каких-либо двух базовых станций из указанной совокупности базовых станций; и
второй модуль определения для определения, в соответствии с набором относительных величин мощностей и дополнительными характеристиками, переданными указанным множеством базовых станций, информации о местоположении терминала, соответствующего идентификатору терминала, подлежащего позиционированию.
С учетом первого аспекта, в первом возможном варианте реализации указанного первого аспекта, первый модуль определения содержит:
первый блок вычисления для вычисления разности между мощностью сигнала, переданной первой базовой станцией, и мощностью сигнала, переданной второй базовой станцией, причем первая базовая станция представляет собой любую базовую станцию из указанного множества базовых станций, а вторая базовая станция представляет собой любую базовую станцию, отличную от первой базовой станции, из указанного множества базовых станций; и
блок добавления для определения указанной разности в качестве относительной величины мощности между указанной первой базовой станцией и указанной второй базовой станцией и добавления указанной относительной величины мощности к набору относительных величин мощностей.
С учетом первого аспекта, во втором возможном варианте реализации этого первого аспекта, второй модуль определения содержит:
первый блок получения для получения, по отдельности, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощности, входящим в набор относительных величин мощностей, для формирования набора матриц позиционирования; и
блок определения для определения, согласно набору матриц позиционирования и на основе соответствия между набором матриц позиционирования и информацией о местоположении, информации о местоположении терминала, соответствующей идентификатору терминала, подлежащего позиционированию.
С учетом второго возможного варианта первого аспекта, в третьем возможном варианте реализации этого первого аспекта, первый блок получения содержит:
субблок определения для определения двух базовых станций, соответствующих первой относительной величине мощности, где первая относительная величина мощности представляет собой относительную величину мощности, входящую в набор относительных величин мощностей;
первый субблок получения для получения, по отдельности, на основе совокупности дополнительных характеристик, переданных указанным множеством базовых станций, дополнительных характеристик, переданных указанными двумя базовыми станциями; и
субблок объединения для объединения первой относительной величины мощности и дополнительных характеристик, переданных указанными двумя базовыми станциями, в матрицу позиционирования, соответствующую первой относительной величине мощности.
С учетом первого аспекта, в четвертом возможном варианте реализации этого первого аспекта, устройство дополнительно содержит:
первый модуль получения для получения информации о местоположении измерительного терминала;
второй модуль приема для приема характеристик сигналов, переданных от указанного множества базовых станций, где совокупность характеристик сигнала содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор базовой станции и время передачи сигнала;
второй модуль получения для получения, согласно характеристикам сигналов, переданным от указанного множества базовых станций, набора матриц позиционирования, соответствующего измерительному терминалу; и
модуль хранения для хранения набора матриц позиционирования и информации о местоположении измерительного терминала с указанием соответствия между набором матриц позиционирования и информацией о местоположении.
С учетом четвертого возможного варианта первого аспекта, в пятом возможном варианте реализации этого первого аспекта, второй модуль получения содержит:
второй блок вычисления для вычисления относительной величины мощности между любыми двумя базовыми станциями из указанного множества базовых станций в соответствии с величинами мощностей сигналов, передаваемых указанным множеством базовых станций для формирования набора относительных величин мощностей; и
второй блок получения для получения, по отдельности, согласно набору относительных величин мощностей и дополнительным характеристикам, передаваемым от указанного множества базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощности, входящим в набор относительных величин мощностей для формирования набора матриц позиционирования, соответствующего измерительному терминалу.
С учетом первого аспекта, в шестом возможном варианте реализации указанного первого аспекта, совокупность дополнительных характеристик дополнительно содержит отношение сигнал/шум; а
первый модуль определения содержит:
блок выбора для выбора эффективных базовых станций из указанного множества базовых станций согласно величинам отношений сигнал/шум, входящим в совокупность дополнительных характеристик, передаваемых всеми базовыми станциями из множества базовых станций; и
третий блок вычисления для вычисления относительной величины мощности между любыми двумя эффективными базовыми станциями из выбранной группы эффективных базовых станций согласно величинам мощностей сигналов, передаваемых базовыми станциями для формирования набора относительных величин мощностей.
С учетом шестого возможного варианта первого аспекта, в седьмом возможном варианте реализации этого первого аспекта, блок выбора содержит:
субблок сравнения для сравнения величин отношений сигнал/шум, передаваемых всеми базовыми станциями из указанного множества базовых станций, с заданным пороговым значением; и
первый субблок выбора для выбора базовых станций, для которых величины отношений сигнал/шум больше заданного порогового значения, в качестве эффективных базовых станций.
С учетом шестого возможного варианта первого аспекта, в восьмом возможном варианте реализации этого первого аспекта, блок выбора содержит:
субблок сортировки для сортировки величин отношений сигнал/шум, передаваемых всеми базовыми станциями из указанного множества базовых станций, в соответствии с заданным порядком;
второй субблок получения для получения заданного числа максимальных величин отношений сигнал/шум из всех рассортированных величин отношений сигнал/шум; и
второй субблок выбора для выбора, из указанного множества базовых станций, базовых станций, соответствующих полученным величинам отношений сигнал/шум, в качестве эффективных базовых станций.
Согласно второму аспекту, предложен способ получения информации о местоположении, содержащий этапы, на которых:
принимают характеристики сигналов и идентификатор терминала, подлежащего позиционированию, передаваемые всеми базовыми станциями из указанного множества базовых станций, причем характеристики сигнала от базовой станции содержат величину мощности сигнала и дополнительные характеристики, и при этом дополнительные характеристики содержат по меньшей мере идентификатор рассматриваемой базовой станции и время передачи сигнала;
определяют набор относительных величин мощностей согласно величинам мощностей сигналов, передаваемых указанным множеством базовых станций, причем набор относительных величин мощностей содержит относительную величину мощности между любыми двумя базовыми станциями из указанного множества базовых станций; и
определяют, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций, информацию о местоположении терминала, соответствующего идентификатору терминала, подлежащего позиционированию.
С учетом второго аспекта, в первом возможном варианте реализации этого второго аспекта, этап определения набора относительных величин мощностей согласно величинам мощностей сигналов, передаваемых указанным множеством базовых станций содержит:
вычисление разности между величиной мощности сигнала, передаваемой первой базовой станцией, и величиной мощности сигнала, передаваемой второй базовой станцией, где первая базовая станция представляет собой любую базовую станцию из указанного множества базовых станций, а вторая базовая станция представляет собой любую базовую станцию, отличную от первой базовой станции, из указанного множества базовых станций; и
определение указанной разности в качестве относительной величины мощности между указанными первой базовой станцией и второй базовой станцией, и добавление указанной относительной величины мощности к набору относительных величин мощностей.
С учетом второго аспекта, во втором возможном варианте реализации этого второго аспекта, этап определения, согласно набору относительных величин мощностей и дополнительным характеристикам, передаваемым указанным множеством базовых станций, информации о местоположении терминала, соответствующего идентификатору терминала, подлежащего позиционированию, содержит:
получение, по отдельности, согласно набору относительных величин мощностей и дополнительным характеристикам, передаваемым указанным множеством базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощности, входящим в набор относительных величин мощностей, для формирования набора матриц позиционирования; и
определяют, согласно набору матриц позиционирования и на основе соответствия между набором матриц позиционирования и информацией о местоположении, информацию о местоположении терминала, соответствующего идентификатору терминала, подлежащего позиционированию.
С учетом второго возможного варианта второго аспекта, в третьем возможном варианте реализации этого второго аспекта, этап получения, по отдельности, согласно набору относительных величин мощностей и дополнительным характеристикам, передаваемым указанным множеством базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощности, входящим в набор относительных величин мощностей, содержит:
определение двух базовых станций, соответствующих первой относительной величине мощности, причем указанная первая относительная величина мощности представляет собой любую относительную величину мощности, содержащуюся в наборе относительных величин мощностей;
определение, по отдельности, на основе дополнительных характеристик, переданных указанным множеством базовых станций, дополнительных характеристик, переданных найденными двумя базовыми станциями; и
объединение указанной первой относительной величины мощности и дополнительных характеристик, переданных указанными двумя базовыми станциями, в матрице позиционирования, соответствующей указанной первой относительной величине мощности.
С учетом второго аспекта, в четвертом возможном варианте реализации указанного второго аспекта, до приема характеристик сигнала и идентификатора терминала, подлежащего позиционированию, переданных указанным множеством базовых станций, способ дополнительно содержит этапы, на которых:
получают информацию о местоположении измерительного терминала;
принимают характеристики сигналов, переданных указанным множеством базовых станций, причем совокупность характеристик сигнала содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор базовой станции и время передачи сигнала;
получают, согласно характеристикам сигналов, переданным указанным множеством базовых станций, набора матриц позиционирования, соответствующих измерительному терминалу; и
сохраняют полученный набор матриц позиционирования и информацию о местоположении измерительного терминала с указанием соответствия между набором матриц позиционирования и информацией о местоположении.
С учетом четвертого возможного варианта второго аспекта, в пятом возможном варианте реализации этого второго аспекта, процедура получения, согласно характеристикам сигналов, переданным множеством базовых станций, набора матриц позиционирования, соответствующего измерительному терминалу, содержит:
вычисление относительной величины мощности между любыми двумя базовыми станциями из указанного множества базовых станций на основе величин мощностей сигналов, переданных указанным множеством базовых станций, для формирования набора относительных величин мощностей; и
получение, по отдельности, согласно набору относительных величин мощностей и дополнительным характеристикам, передаваемым множеством базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощностей, входящим в состав набора относительных величин мощностей для формирования набора матриц позиционирования, соответствующего измерительному терминалу.
С учетом второго аспекта, в шестом возможном варианте реализации этого второго аспекта, совокупность дополнительных характеристик дополнительно содержит отношение сигнал/шум; а
процедура определения набора относительных величин мощностей согласно мощностям сигналов, передаваемым указанным множеством базовых станций, содержит:
выбор эффективных базовых станций из указанного множества базовых станций согласно величинам отношений сигнал/шум, входящим в состав совокупности дополнительных характеристик, передаваемых всеми базовыми станциями из указанного множества базовых станций; и
вычисление относительной величины мощности между любыми двумя эффективными базовыми станциями из множества эффективных базовых станций согласно величинам мощностей сигналов, переданных эффективными базовыми станциями, для формирования набора относительных величин мощностей.
С учетом шестого возможного варианта второго аспекта, в седьмом возможном варианте реализации этого второго аспекта, процедура выбора эффективных базовых станций из указанного множества базовых станций согласно величинам отношений сигнал/шум, входящих в состав совокупности дополнительных характеристик, переданных всеми базовыми станциями из указанного множества базовых станций, содержит:
сравнение, по отдельности, величин отношений сигнал/шум, переданных всеми базовыми станциями указанного множества базовых станций, с заданным пороговым значением; и
выбор базовых станций, для которых величины отношений сигнал/шум больше заданного порогового значения, в качестве эффективных базовых станций.
С учетом шестого возможного варианта второго аспекта, в восьмом возможном варианте реализации этого второго аспекта, процедура выбора эффективных базовых станций из указанного множества базовых станций согласно величинам отношений сигнал/шум, входящих в совокупность дополнительных характеристик, переданных всеми базовыми станциями из указанного множества базовых станций, содержит:
сортировку величин отношений сигнал/шум, переданных всеми базовыми станциями из указанного множества базовых станций, согласно заданному порядку;
получение заданного числа максимальных величин отношений сигнал/шум из рассортированных величин отношений сигнал/шум; и
выбор, из указанного множества базовых станций, базовых станций, соответствующих полученным величинам отношений сигнал/шум, в качестве эффективных базовых станций.
Согласно третьему аспекту, предложено устройство для получения информации о местоположении, содержащее:
запоминающее устройство и процессор, выполненный с возможностью осуществления способа согласно любому из пунктов 10 – 18 Формулы изобретения.
В этом варианте настоящего изобретения принимают характеристики сигналов и идентификатор терминала, подлежащего позиционированию, переданные всеми базовыми станциями из множества базовых станций, где совокупность характеристик сигнала от базовой станции содержит величину мощности сигнала и дополнительные характеристики, при этом характеристики содержат по меньшей мере идентификатор рассматриваемой базовой станции и время передачи сигнала; определяют набор относительных величин мощностей на основе величин мощностей сигналов, переданным указанным множеством базовых станций, при этом набор относительных величин мощностей содержит относительную величину мощности между любыми двумя базовыми станциями из указанного множества базовых станций; и определяют информацию о местоположении терминала, соответствующего идентификатору терминала, подлежащего позиционированию, согласно этому набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций. Указанный набор относительных величин мощностей получают согласно величинам мощностей сигналов, переданным указанным множеством базовых станций, и информацию о местоположении терминала, подлежащего позиционированию, получают согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций. Поэтому получение информации о местоположении с использованием относительной величины мощности позволяет избежать нежелательного влияния различия мощностей передач терминалов и значительно уменьшить погрешность получения информации о местоположении.
Краткое описание чертежей
Фиг. 1 представляет упрощенную структурную схему устройства для получения информации о местоположении согласно Варианту 1 настоящего изобретения;
Фиг. 2 представляет логическую схему способа получения информации о местоположении согласно Варианту 2 настоящего изобретения;
Фиг. 3-1 представляет логическую схему способа получения информации о местоположении согласно Варианту 3 настоящего изобретения;
Фиг. 3-2 представляет логическую схему способа получения информации о местоположении согласно Варианту 3 настоящего изобретения; и
Фиг. 4 представляет упрощенную структурную схему устройства получения информации о местоположении согласно Варианту 4 настоящего изобретения.
Осуществление изобретения
Для того чтобы сделать цели, технические решения и преимущества настоящего изобретения более ясными, далее варианты настоящего изобретения рассмотрены подробно со ссылками на прилагаемые чертежи.
Вариант 1
Показанный на Фиг. 1 вариант настоящего изобретения предлагает устройство для получения информации о местоположении. Устройство содержит:
первый модуль 101 приема для приема характеристик сигналов и идентификатора терминала, местоположение которого нужно определить, переданных всеми базовыми станциями из состава указанного множества базовых станций, где совокупность характеристик сигнала, получаемая от базовой станции, содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор рассматриваемой базовой станции и время передачи сигнала;
первый модуль 102 определения для определении набора относительных величин мощностей согласно величинам мощностей сигналов, переданным указанным множеством базовых станций, где набор относительных величин мощностей содержит относительную величину мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций; и
второй модуль 103 определения для определения согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций, информации о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить.
Когда пользователю нужно использовать сервис определения местоположения с применением какого-либо терминала, этот терминал представляет собой терминал, местоположение которого нужно определить. Этот терминал, местоположение которого нужно определить, передает свой идентификатор и зондирующий опорный сигнал в адрес указанного множества базовых станций, в зоне действия которых находится терминал, местоположение которого нужно определить. Этот терминал, местоположение которого нужно определить, получает указание момента времени передачи, когда был передан зондирующий опорный сигнал, и передает это указание момента времени передачи в адрес указанного множества базовых станций.
Каждая базовая станция из состава указанного множества базовых станций принимает идентификатор терминала, местоположение которого нужно определить, зондирующий опорный сигнал и указание момента времени передачи этого сигнала, переданные терминалом, местоположение которого нужно определить, получает характеристики сигнала согласно зондирующему опорному сигналу и моменту времени передачи и передает идентификатор терминала, местоположение которого нужно определить, и полученные характеристики сигнала серверу позиционирования.
Совокупность характеристик сигнала содержит мощность зондирующего опорного сигнала, принятого базовой станцией, и дополнительные характеристики. Совокупность дополнительных характеристик содержит по меньшей мере идентификатор этой базовой станции, время передачи сигнала и величину отношения сигнал/шум. Это отношение сигнал/шум представляет собой отношение мощности нормального сигнала, принимаемого базовой станцией, к мощности сигнала шумов, принимаемого этой базовой станцией. В общем случае повышенная величина отношения сигнал/шум обозначает меньшее содержание шумов в сигнале и более высокое качество сигнала.
В частности, каждая базовая станция из указанного множества базовых станций принимает идентификатор терминала, местоположение которого нужно определить, зондирующий опорный сигнал и указание момента времени передачи, переданные терминалом, местоположение которого нужно определить; вычисляет, согласно зондирующему опорному сигналу, величину мощности и величину отношения сигнал/шум для этого зондирующего опорного сигнала; получает момент времени приема, когда принят зондирующий опорный сигнал, вычисляет разницу во времени между моментом времени приема и моментом времени передачи и использует эту разницу во времени в качестве времени передачи зондирующего опорного сигнала; объединяет свой идентификатор базовой станции, время передачи сигнала и величину отношения сигнал/шум, полученные в результате вычислений, в совокупность дополнительных характеристик; объединяет величину мощности сигнала, полученную в результате вычислений, и эти дополнительные характеристики в совокупность характеристик сигнала, соответствующих этой базовой станции; и передает характеристики сигнала и идентификатор терминала, местоположение которого нужно определить, серверу позиционирования. Аналогично, для каждой базовой станции, отличной от этой базовой станции, в указанном множестве базовых станций, могут быть получены характеристики сигнала, и затем эти полученные характеристики сигнала и идентификатор терминала, местоположение которого нужно определить, могут быть переданы серверу позиционирования, как это описано выше.
Конкретный способ вычисления величин мощности и отношения сигнал/шум для зондирующего опорного сигнала известен в технике. Подробности здесь рассмотрены не будут.
Затем первый приемный модуль 101 принимает характеристики сигнала и идентификатор терминала, местоположение которого нужно определить, переданные указанным множеством базовых станций.
Этот первый решающий модуль 102 содержит:
первый вычислительный блок, конфигурированный для вычисления разности между величиной мощности сигнала, переданной первой базовой станцией, и величиной мощности сигнала, переданной второй базовой станцией, где первая базовая станция представляет собой какую-либо базовую станцию из состава указанного множества базовых станций, а вторая базовая станция представляет собой какую-либо базовую станцию из состава указанного множества базовых станций, отличную от первой базовой станции; и
блок добавления, конфигурированный для определения указанной разности в качестве относительной величины мощности между первой базовой станцией и второй базовой станцией и добавления относительной величины мощности к набору относительных величин мощностей.
Прежде вычисления относительной величины мощности между какими-либо двумя базовыми станции из состава указанного множества базовых станций, первый решающий модуль 102 выбирает эффективные базовые станции из указанного множества базовых станций согласно характеристикам сигналов, переданным указанным множеством базовых станций.
Эффективная базовая станция представляет собой базовую станцию, для которой величина отношения сигнал/шум удовлетворяет заданному условию. Это заданное условие может представлять собой определение базовых станций, для которых величины отношений сигнал/шум превышают заданный порог, в качестве эффективных базовых станций, либо заданное условие может представлять собой определение заданного числа базовых станций с максимальными величинами отношений сигнал/шум в качестве эффективных базовых станций.
Затем, первый решающий модуль 102 получает, согласно характеристикам сигналов, переданным эффективными базовыми станциями, набор относительных величин мощностей, соответствующих терминалу, местоположение которого нужно определить.
В частности, первый решающий модуль 102 выбирает какие-либо две базовые станции из совокупности найденных эффективных базовых станций и объединяет эти две выбранные базовые станции в подгруппу базовых станций для получения нескольких подгрупп базовых станций; для какой-либо подгруппы базовых станций из состава полученного множества подгрупп базовых станций модуль отдельно получает, на основе характеристик сигналов, переданных двумя базовыми станциями из состава этой подгруппы базовых станций, величины мощностей сигналов, переданные этими двумя базовыми станциями, и идентификаторы этих двух базовых станций; и вычисляет разность между величинами мощностей сигналов, переданными этими двумя базовыми станциями, использует эту разность, полученную в результате вычислений, в качестве относительной величины мощности, и объединяет эту относительную величину мощности и идентификаторы двух базовых станций подгруппы в элемент, содержащий относительную величину мощности. Аналогично, для каждой из других подгрупп базовых станций, отличных от рассмотренной подгруппы базовых станций из множества подгрупп базовых станций, элемент, содержащий относительную величину мощности между двумя базовыми станциями, входящими в каждую из прочих подгрупп базовых станций, может быть получен в соответствии с описанными выше операциями. Полученные элементы, содержащие все относительные величины мощностей, объединяют в набор относительных величин мощностей, соответствующий терминалу, местоположение которого нужно определить.
Второй решающий модуль 103 содержит:
первый получающий блок, конфигурированный для отдельного получения, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощностей, входящим в набор относительных величин мощностей, с целью формирования набора матриц позиционирования; и
решающий блок, конфигурированный для определения, согласно набору матриц позиционирования и на основе соответствия между набором матриц позиционирования и информацией о местоположении, информации о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить.
Первый получающий блок отдельно получает, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций, матрицы позиционирования, соответствующие всем относительным величинам мощностей, входящим в набор относительных величин мощностей, с целью формирования набора матриц позиционирования, соответствующего терминалу, местоположение которого нужно определить.
В частности, первый получающий блок получает элемент из набора относительных величин мощностей, получает относительную величину мощности и идентификаторы двух базовых станций из этого элемента, и определяет две базовые станции, соответствующие этим двум идентификаторам базовых станций, в качестве двух базовых станций, соответствующих относительной величине мощности; отдельно получает, на основе совокупности дополнительных характеристик, переданных от указанного множества базовых станций, дополнительные характеристики, переданные найденными двумя базовыми станциями; и объединяет эту относительную величину мощности и дополнительные характеристики, переданные рассматриваемыми двумя базовыми станциями, в матрицу позиционирования, содержащую эту относительную величину мощности. Аналогично, для каждого из других элементов, отличных от рассмотренного элемента и входящих в состав указанного набора относительных величин мощностей, матрицу позиционирования, содержащую относительную величину мощности, входящую в состав любого из этих других элементов, можно получить согласно описанным выше операциям. Все полученные матрицы позиционирования объединяют в набор матриц позиционирования, соответствующий терминалу, местоположение которого нужно определить.
Решающий блок определяет, согласно набору матриц позиционирования, соответствующему терминалу, местоположение которого нужно определить, информацию о местоположении, соответствующую терминалу, местоположение которого нужно определить, и передает эту информацию о местоположении терминалу, местоположение которого нужно определить.
В частности, решающий блок определяет, на основе сохраненного соответствия между набором матриц позиционирования и информацией о местоположении, все наборы матриц позиционирования, входящие в это соответствие, и по отдельности вычисляет подобие между набором матриц позиционирования, соответствующим терминалу, местоположение которого нужно определить, и всеми полученными наборами матриц позиционирования с целью определения набора матриц позиционирования, имеющего максимальное подобие; определяет соответствующую информацию о местоположении согласно набору матриц позиционирования и на основе соответствия между набором матриц позиционирования и информацией о местоположении, и определяет эту найденную информацию о местоположении в качестве информации о местоположении, соответствующей терминалу, местоположение которого нужно определить; и передает эту информацию о местоположении терминалу, местоположение которого нужно определить, согласно идентификатору терминала, местоположение которого нужно определить.
Первый получающий блок содержит:
субблок определения для определения двух базовых станций, соответствующих первой относительной величине мощности, где эта первая относительная величина мощности представляет собой какую-либо из относительных величин мощности, входящих в состав набора относительных величин мощностей;
первый получающий субблок, конфигурированный для получения отдельно, из совокупности дополнительных характеристик, переданных от указанного множества базовых станций, дополнительных характеристик, переданных рассматриваемыми двумя базовыми станциями; и
объединяющий субблок, конфигурированный для объединения первой относительной величины мощности и дополнительных характеристик, переданных указанными двумя базовыми станциями, в матрицу позиционирования, соответствующую первой относительной величине мощности.
Дополнительно устройство содержит:
первый получающий модуль определения для получения информации о местоположении измерительного терминала;
второй приемный модуль определения для приема характеристик сигналов, переданных от указанного множества базовых станций, где совокупность этих характеристик сигнала от одной станции содержит величину мощности сигнала и дополнительные характеристики, а совокупность этих дополнительных характеристик содержит по меньшей мере идентификатор базовой станции и время передачи сигнала;
второй получающий модуль определения для получения, согласно характеристикам сигналов, переданным от указанного множества базовых станций, набора матриц позиционирования, соответствующего измерительному терминалу; и
запоминающий модуль определения для сохранения набора матриц позиционирования и информации о местоположении измерительного терминала согласно соответствию между набором матриц позиционирования и информацией о местоположении.
Прежде, чем предоставить услуги сервиса определения местоположения пользователю, специалист в рассматриваемой области разбивает всю зону действия радиосвязи на несколько участков одинакового размера и определяет информацию о местоположении, соответствующую каждому участку. Затем специалист в этой области помещает в каждый из этих участков измерительный терминал для выполнения измерений, необходимых для определения местоположения, и передает, с использованием этого измерительного терминала, указанным нескольким базовым станциям, в зоне действия которых находится измерительный терминал, информацию о местоположении этого участка, зондирующий опорный сигнал и указание момента времени, когда передан этот зондирующий опорный сигнал.
Зона действия радиосвязи содержит зоны действия связи от всех базовых станций. Информация о местоположении, соответствующая каждому участку, может представлять собой указание долготы и широты пункта, где находится центр или какая-нибудь из вершин этого участка, либо такая информация о местоположении, соответствующая каждому участку, может представлять собой диапазон значений долготы и диапазон значений широты, охватываемые этим участком. Измерительный терминал в общем случае представляет собой профессиональное измерительное устройство, обладающее высокой точностью.
Аналогично, для каждого из прочих участков, отличных от рассмотренного участка, в совокупности участков, созданных посредством разбиения, когда измерительный терминал по отдельности помещают во все прочие участки, информацию о местоположении, зондирующий опорный сигнал и указание момента времени, когда передан этот зондирующий опорный сигнал, можно передать, с применением описанных выше операций, в адрес указанного множества базовых станций, в зоне действия которых находится измерительный терминал.
Все базовые станции из состава указанного множества базовых станций по отдельности принимают информацию о местоположении, зондирующий опорный сигнал и указание момента времени, когда все это передано измерительным терминалом, получают характеристики сигнала согласно принятым зондирующему опорному сигналу и моменту времени передачи, и передают информацию о местоположении и полученные характеристики сигнала серверу позиционирования.
Совокупность характеристик сигнала содержит величину мощности зондирующего опорного сигнала, принятого базовой станцией, и дополнительные характеристики. Совокупность этих дополнительных характеристик содержит по меньшей мере идентификатор базовой станции и время передачи сигнала. Это время передачи сигнала представляет собой время, затраченное на передачу (прохождение) сигнала от терминала в адрес базовой станции.
Каждая базовая станция из состава указанного множества базовых станций, в зоне действия которых находится измерительный терминал, принимает информацию о местоположении, зондирующий опорный сигнал и указание момента времени передачи, переданные измерительным терминалом; вычисляет, согласно зондирующему опорному сигналу, величину мощности этого зондирующего опорного сигнала; получает указание момента времени приема, когда принят зондирующий опорный сигнал, вычисляет разницу во времени между моментом времени приема и моментом времени передачи и использует эту разницу во времени в качестве времени передачи зондирующего опорного сигнала; объединяет идентификатор этой базовой станции и время передачи сигнала в виде совокупности дополнительных характеристик, и объединяет дополнительные характеристики и величину мощности сигнала, полученную посредством вычисления, в виде совокупности характеристик сигнала, соответствующих рассматриваемой базовой станции; и передает эту совокупность характеристик сигнала и принятую информацию о местоположении серверу позиционирования. Аналогично, для каждой базовой станции, отличной от рассмотренной базовой станции, из состава указанного множества базовых станций, можно получить характеристики сигнала, и совокупность этих характеристик сигнала и информацию о местоположении можно передать серверу позиционирования , согласно изложенным выше операциям.
В технике известен конкретный способ вычисления величины мощности зондирующего опорного сигнала. Поэтому подробности здесь рассмотрены не будут.
Затем первый получающий модуль получает информацию о местоположении измерительного терминала от указанного множества базовых станций. Второй приемный модуль принимает характеристики сигнала и информацию о местоположении, переданные указанным множеством базовых станций.
Второй получающий модуль содержит:
второй вычислительный блок, конфигурированный для вычисления относительной величины мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций согласно величинам мощностей сигналов, переданным указанным множеством базовых станций, с целью формирования набора относительных величин мощностей; и
второй получающий блок, конфигурированный для отдельного получения, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощностей, входящим в состав набора относительных величин мощностей, с целью формирования набора матриц позиционирования, соответствующего измерительному терминалу.
Второй вычислительный блок получает, согласно совокупности характеристик сигналов, переданных указанным множеством базовых станций, набор относительных величин мощностей, соответствующий измерительному терминалу.
Этот набор относительных величин мощностей содержит по меньшей мере один элемент. Этот элемент содержит относительную величину мощности между двумя базовыми станциями и идентификаторы этих двух базовых станций.
В частности, второй вычислительный блок выбирает какие-либо две базовые станции из указанного множества базовых станций и объединяет эти две выбранные базовые станции в подгруппу базовых станций, с целью получения нескольких подгрупп базовых станций; для какой-либо подгруппы базовых станций из полученного множества подгрупп базовых станций отдельно получает, на основе характеристик сигнала, переданных двумя базовыми станциями, входящими в рассматриваемую подгруппу базовых станций, величины мощностей сигналов, переданные этими двумя базовыми станциями, и идентификаторы этих двух базовых станций; и вычисляет разность между величинами мощностей сигналов, переданными указанными двумя базовыми станциями, использует эту разность, полученную в результате вычислений, в качестве относительной величины мощности между рассматриваемыми двумя базовыми станциями, и объединяет эту относительную величину мощности и идентификаторы указанных двух базовых станций в один элемент, содержащий относительную величину мощности. Аналогично, для каждой из прочих подгрупп базовых станций, отличных от рассмотренной подгруппы базовых станций, в составе указанного множества подгрупп базовых станций, элемент, содержащий относительную величину мощности между этими двумя базовыми станциями, образующими рассматриваемую одну из прочих подгрупп базовых станций, может быть получен в соответствии с описанными выше операциями. Полученные элементы, содержащие все относительные величины мощностей, объединяют в набор относительных величин мощностей, соответствующий измерительному терминалу.
Второй получающий блок получает элемент из состава набора относительных величин мощностей, получает относительную величину мощности и два идентификатора базовых станций из этого элемента и определяет две базовые станции, соответствующие полученным двум идентификаторам базовых станций, в качестве двух базовых станций, соответствующих этой относительной величине мощности; отдельно получает из совокупности дополнительных характеристик, переданных от указанного множества базовых станций, дополнительные характеристики, переданные найденными двумя базовыми станциями; и объединяет указанную относительную величину мощности и дополнительные характеристики, переданные найденными двумя базовыми станциями, в матрицу позиционирования, содержащую указанную относительную величину мощности. Аналогично, для каждого из прочих элементов, отличного от элемента, входящего в рассматриваемый набор относительных величин мощностей, матрица позиционирования, содержащая относительную величину мощности, входящую в состав этого прочего элемента, может быть получена в соответствии с описанными выше операциями. Все полученные матрицы позиционирования объединяют в набор матриц позиционирования, соответствующий измерительному терминалу.
Затем, запоминающий модуль сохраняет набор матриц позиционирования, соответствующий измерительному терминалу, и информацию о местоположении этого измерительного терминала согласно установленному соответствию между набором матриц позиционирования и информацией о местоположении.
Совокупность дополнительных характеристик далее содержит величину отношения сигнал/шум.
Первый решающий модуль 102 содержит:
блок выбора для выбора эффективных базовых станций из указанного множества базовых станций согласно величинам отношений сигнал/шум, входящим в состав совокупности дополнительных характеристик, переданных всеми базовыми станциями из состава указанного множества базовых станций; и
третий вычислительный блок, конфигурированный для вычисления относительной величины мощности между какими-либо двумя эффективными базовыми станциями из совокупности эффективных базовых станций согласно величинам мощностей сигналов, переданных эффективными базовыми станциями, с целью формирования набора относительных величин мощностей.
Блок выбора содержит:
субблок сравнения, конфигурированный для отдельного сравнения величин отношений сигнал/шум, переданных всеми базовыми станциями из состава указанного множества базовых станций, с заданным порогом; и
первый субблок выбора для выбора базовых станций, имеющих величины отношений сигнал/шум, превосходящие заданный порог, в качестве эффективных базовых станций.
Сервер позиционирования принимает характеристики сигналов и идентификатор терминала, местоположение которого нужно определить, переданные от указанного множества базовых станций; отдельно получает, на основе совокупности характеристик сигналов, переданных указанным множеством базовых станций, величины отношений сигнал/шум, переданные всеми базовыми станциями из состава указанного множества базовых станций; и отдельно сравнивает эти величины отношений сигнал/шум, переданные всеми базовыми станциями из состава указанного множества базовых станций, с заданным порогом, с целью выбрать базовые станции, имеющие величины отношений сигнал/шум, превосходящие указанный заданный порог, в качестве эффективных базовых станций.
Блок выбора содержит:
сортировочный субблок, конфигурированный для сортировки величин отношений сигнал/шум, переданных всеми базовыми станциями из состава указанного множества базовых станций, согласно заданному порядку;
второй получающий субблок, конфигурированный для получения заданного числа максимальных величин отношений сигнал/шум из всей совокупности рассортированных величин отношений сигнал/шум; и
второй субблок выбора для выбора, из указанного множества базовых станций, тех базовых станций, которые соответствуют полученным величинам отношений сигнал/шум, в качестве эффективных базовых станций.
Сервер позиционирования принимает характеристики сигналов и идентификатор терминала, местоположение которого нужно определить, переданные указанным множеством базовых станций; отдельно получает, на основе характеристик сигнала, переданных указанным множеством базовых станций, величины отношений сигнал/шум, переданные всеми базовыми станциями из состава указанного множества базовых станций; сортирует эти величины отношений сигнал/шум, переданные всеми базовыми станциями из состава указанного множества базовых станций, согласно заданному порядку; получает заданное число максимальных величин отношений сигнал/шум из совокупности всех рассортированных величин отношений сигнал/шум; и выбирает из указанного множества базовых станций, те базовые станции, которые соответствуют полученным величинам отношений сигнал/шум, в качестве эффективных базовых станций.
Указанный заданный порядок может представлять собой сортировку в порядке убывания или сортировку в порядке возрастания. Величины отношений сигнал/шум сортируют в порядке убывания и затем отбирают заданное число величин отношений сигнал/шум, начиная с первой величины отношения сигнал/шум в ряду рассортированных величин отношений сигнал/шум.
В этом варианте настоящего изобретения принимают характеристики сигналов и идентификатор терминала, местоположение которого нужно определить, переданные всеми базовыми станциями из состава указанного множества базовых станций, где совокупность характеристик сигнала от любой базовой станции содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор указанной базовой станции и время передачи сигнала; определяют набор относительных величин мощностей в соответствии с величинами мощностей сигналов, переданными от указанного множества базовых станций, где набор относительных величин мощностей содержит относительную величину мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций; и определяют информацию о местоположении терминала, соответствующего терминалу, местоположение которого нужно определить, в соответствии с набором относительных величин мощностей и дополнительными характеристиками, переданными от указанного множества базовых станций. Этот набор относительных величин мощностей получают согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, и получают информацию о местоположении терминала, местоположение которого нужно определить, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций. Поэтому получение информации о местоположении с использованием относительной величины мощности позволяет избежать нежелательного влияния различия величин мощностей передач терминалов и значительно уменьшить погрешность получения информации о местоположении.
Вариант 2
На Фиг. 2 показан вариант настоящего изобретения, предлагающий способ получения информации о местоположении. Этот способ содержит:
Этап 201: Прием характеристик сигналов и идентификатора терминала, местоположение которого нужно определить, переданных всеми базовыми станциями из состава указанного множества базовых станций, где совокупность характеристик сигнала, передаваемых какой-либо базовой станцией, содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит идентификатор базовой станции и время передачи сигнала.
Этап 202: Определение набора относительных величин мощностей согласно величинам мощностей, переданным указанным множеством базовых станций, где этот набор относительных величин мощностей содержит относительную величину мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций.
Этап 203: Определение, согласно указанному набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций, информации о местоположении терминала, соответствующей идентификатору терминала, местоположение которого нужно определить.
Процедура определения набора относительных величин мощностей согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, содержит:
вычисление разности между величиной мощности сигнала, переданной первой базовой станцией, и величиной мощности сигнала, переданной второй базовой станцией, где первая базовая станция представляет собой какую-либо базовую станцию из состава указанного множества базовых станций, а вторая базовая станция представляет собой какую-либо базовую станцию, отличную от первой базовой станции, из состава указанного множества базовых станций; и
определение указанной разности в качестве относительной величины мощности между первой базовой станцией и второй базовой станцией и добавление этой относительной величины мощности к набору относительных величин мощностей.
Процедура определения, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций, информации о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить, содержит:
отдельно получение, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощности, входящим в состав набора относительных величин мощностей, с целью формирования набора матриц позиционирования; и
определение, согласно набору матриц позиционирования и на основе соответствия между набором матриц позиционирования и информацией о местоположении, информации о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить.
Процедура отдельного получения, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным указанным множеством базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощности, входящим в состав набора относительных величин мощностей, содержит:
определение двух базовых станций, соответствующих первой относительной величине мощности, где эта первая относительная величина мощности представляет собой какую-либо относительную величину мощности, входящую в состав набора относительных величин мощностей;
отдельное получение, на основе дополнительных характеристик, переданных от указанного множества базовых станций, дополнительных характеристик, переданных указанными двумя найденными базовыми станциями; и
объединение первой относительной величины мощности и дополнительных характеристик, переданных указанными двумя базовыми станциями, в матрице позиционирования, соответствующей первой относительной величине мощности.
Далее, прежде приема характеристик сигнала и идентификатора терминала, местоположение которого нужно определить, переданных от указанного множества базовых станций, способ дополнительно содержит:
получение информации о местоположении измерительного терминала;
прием характеристик сигналов, переданных от указанного множества базовых станций, где совокупность этих характеристик сигналов содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор соответствующей базовой станции и время передачи сигнала;
получение, согласно характеристикам сигналов, переданным от указанного множества базовых станций, набора матриц позиционирования, соответствующих измерительному терминалу; и
сохранение этого набора матриц позиционирования и информации о местоположении измерительного терминала с указанием соответствия между набором матриц позиционирования и информацией о местоположении.
Процедура получения, согласно характеристикам сигналов, переданным от указанного множества базовых станций, набора матриц позиционирования, соответствующего измерительному терминалу, содержит:
вычисление относительной величины мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций согласно величинам мощностей сигнала, переданным от этого указанного множества базовых станций, с целью формирования набора относительных величин мощностей; и
отдельно, получение согласно этому набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощностей, входящим в состав набора относительных величин мощностей, с целью формирования набора матриц позиционирования, соответствующих измерительному терминалу.
Совокупность дополнительных характеристик дополнительно содержит величину отношения сигнал/шум.
Процедура определения набора относительных величин мощностей согласно величинам мощностей, переданным от указанного множества базовых станций, содержит:
выбор эффективных базовых станций из указанного множества базовых станций согласно величинам отношений сигнал/шум, входящим в состав совокупности дополнительных характеристик, переданных всеми базовыми станциями из состава указанного множества базовых станций; и
вычисление относительной величины мощности между какими-либо двумя эффективными базовыми станциями из совокупности эффективных базовых станций согласно величинам мощностей сигналов, переданным этими эффективными базовыми станциями, с целью формирования набора относительных величин мощностей.
Процедура выбора эффективных базовых станций из указанного множества базовых станций согласно совокупности величин отношений сигнал/шум, входящих в состав дополнительных характеристик, переданных всеми базовыми станциями из состава указанного множества базовых станций, содержит:
по отдельности, сравнение величин отношений сигнал/шум, переданных всеми базовыми станциями из состава указанного множества базовых станций, с заданным порогом; и
выбор базовых станций, для которых величины отношений сигнал/шум превышают заданный порог, в качестве эффективных базовых станций.
Процедура выбора эффективных базовых станций из указанного множества базовых станций согласно величинам отношения сигнал/шум, входящим в состав совокупности дополнительных характеристик, переданных всеми базовыми станциями из состава из состава указанного множества базовых станций, содержит:
сортировку величин отношений сигнал/шум, переданных всеми базовыми станциями из состава указанного множества базовых станций, согласно заданному порядку;
получение заданного числа максимальных величин отношений сигнал/шум из совокупности всех рассортированных величин отношений сигнал/шум; и
выбор, из указанного множества базовых станций, тех базовых станций, которые соответствуют полученным величинам отношений сигнал/шум, в качестве эффективных базовых станций.
В этом варианте настоящего изобретения принимают характеристики сигналов и идентификатор терминала, местоположение которого нужно определить, переданные всеми базовыми станциями из состава указанного множества базовых станций, где совокупность характеристик сигнала от любой базовой станции содержит величину мощности сигнала и дополнительные характеристики, и совокупность этих дополнительных характеристик содержит идентификатор этой базовой станции и время передачи сигнала; определяют набор относительных величин мощностей согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, где набор относительных величин мощностей содержит относительную величину мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций; и определяют информацию о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций. Этот набор относительных величин мощностей получают согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, и получают информацию о местоположении терминала, местоположение которого нужно определить, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций. Поэтому получение информации о местоположении с использованием относительной величины мощности позволяет избежать нежелательного влияния различия мощностей передач терминалов и значительно уменьшить погрешность получения информации о местоположении.
Вариант 3
Один из вариантов настоящего изобретения предлагает способ получения информации о местоположении. Сегодня сервис определения местоположения используется широко. Когда пользователь запрашивает услуги сервиса определения местоположения, сервер позиционирования может получить, с использованием способа, предложенного в этом варианте настоящего изобретения, информацию о местоположении терминала, соответствующего пользователю, и передать полученную информацию о местоположении терминалу, соответствующему пользователю. Способ в частности содержит:
Прежде, чем услуги сервиса определения местоположения будут предоставлены пользователю, необходимо произвести измерения местоположения путем выполнения операций согласно следующим этапам 301 – 305. Как показано на Фиг. 3-1, способ в частности содержит:
Этап 301: Измерительный терминал передает, в адрес указанного множества базовых станций, в зоне действия которых находится этот измерительный терминал, информацию о местоположении, зондирующий опорный сигнал и указание момента времени передачи, в какой был передан этот зондирующий опорный сигнал.
Прежде, чем услуги сервиса определения местоположения будут предоставлены пользователю, специалист в рассматриваемой области разбивает всю зону действия радиосвязи на несколько участков одинакового размера и определяет информацию о местоположении, соответствующую каждому участку. Затем специалист в этой области помещает в каждый из этих участков измерительный терминал, с целью производства измерения местоположения, и передает, с использованием этого измерительного терминала, в адрес указанного множества базовых станций, в зоне действия которых находится этот измерительный терминал, информацию о местоположении рассматриваемого в текущий момент участка, зондирующий опорный сигнал и указание момента времени передачи, когда был передан этот зондирующий опорный сигнал.
Зона действия радиосвязи содержит зоны действия радиосигналов от всех базовых станций. Информация о местоположении, соответствующая каждому участку, может представлять собой долготу и широту пункта, где находится центральная точка или какая-либо из вершин этого участка, либо информация о местоположении, соответствующая каждому участку, может представлять собой диапазон значений долготы и диапазон значений широты, охватываемые этим участком. Измерительный терминал в общем случае представляет собой профессиональное измерительное устройство, обладающее высокой точностью.
Аналогично, для каждого из прочих участков, отличных от рассмотренного участка, в совокупности участков, созданных посредством разбиения, когда измерительный терминал по отдельности помещают во все прочие участки, информацию о местоположении, зондирующий опорный сигнал и указание момента времени, когда передан этот зондирующий опорный сигнал, можно передать, с применением описанных выше операций, в адрес указанного множества базовых станций, в зоне действия которых находится измерительный терминал.
Например, предположим, что специалист поместил измерительный терминал на участок 1 с целью произведения измерений местоположения; а совокупность базовых станций, в зоне действия которых находится этот участок 1, содержит базовые станции 1, 2 и 3, информация о местоположении участка 1 имеет вид (45, 50), а момент времени передачи обозначен t0. Измерительный терминал передает, в адрес базовых станций 1, 2 и 3, в зоне действия которых находится этот измерительный терминал, информацию (45, 50) о местоположении, зондирующий опорный сигнал SRS1 и момент t0 времени передачи, в который передан зондирующий опорный сигнал SRS1.
Этап 302: Все базовые станции из состава указанного множества базовых станций по отдельности принимают указанные информацию о местоположении, зондирующий опорный сигнал и указание момента времени передачи, переданные измерительным терминалом, получают характеристики сигнала согласно зондирующему опорному сигналу и моменту времени передачи и передают эту информацию о местоположении и полученные характеристики сигнала серверу позиционирования.
Совокупность характеристик сигнала содержит величину мощности зондирующего опорного сигнала, принятого базовой станцией, и дополнительные характеристики. Совокупность дополнительных характеристик содержит по меньшей мере идентификатор базовой станции и время передачи сигнала. Время передачи сигнала представляет собой время, затраченное на передачу (прохождение) сигнала от терминала до базовой станции.
Этот этап, в частности, осуществляется следующим образом: каждая базовая станция из состава указанного множества базовых станций, в зоне действия которых находится измерительный терминал, принимает информацию о местоположении, зондирующий опорный сигнал и указание момента времени передачи, которые были переданы измерительным терминалом; вычисляет, согласно зондирующему опорному сигналу, величину мощности этого зондирующего опорного сигнала; получает указание момента времени приема, в который принят зондирующий опорный сигнал, вычисляет разницу во времени между моментом времени приема и моментом времени передачи, и использует эту разницу во времени в качестве времени передачи зондирующего опорного сигнала; объединяет идентификатор базовой станции и время передачи сигнала в совокупность дополнительных характеристик, и объединяет эти дополнительные характеристики и величину мощности сигнала, полученную в результате вычислений, в совокупность характеристик сигнала, соответствующих базовой станции; и передает эти характеристики сигнала и принятую информацию о местоположении серверу позиционирования. Аналогично для каждой из прочих базовых станций, отличных от рассмотренной базовой станции, из состава указанного множества базовых станций можно получить характеристики сигнала и затем можно передать эти характеристики сигнала и информацию о местоположении серверу позиционирования , с применением описанных выше операций.
В технике известен конкретный способ вычисления величины мощности зондирующего опорного сигнала. Подробности здесь описаны не будут.
Например, базовая станция 1 принимает информацию (45, 50) о местоположении, зондирующий опорный сигнал SRS1 и указание момента t0 времени передачи, переданные измерительным терминалом; вычисляет, согласно зондирующему опорному сигналу SRS1, величину p1 мощности зондирующего опорного сигнала SRS1; получает указание момента t1 времени приема, в который принят зондирующий опорный сигнал SRS1, вычисляет разницу (t1–t0) во времени между моментом t1 времени приема и моментом t0 времени передачи, и использует эту разницу (t1–t0) во времени в качестве времени передачи зондирующего опорного сигнала SRS1; объединяет идентификатор eNB1 базовой станции 1 и время (t1–t0) передачи сигнала в совокупность дополнительных характеристик F1, и объединяет эти дополнительные характеристики F1 и величину p1 мощности сигнала, полученную в результате вычислений, в совокупность характеристик S1 сигнала, соответствующую базовой станции 1; и передает эти характеристики S1 сигнала и принятую информацию (45, 50) о местоположении серверу позиционирования.
Аналогично, в соответствии с описанными выше операциями, совокупность характеристик S2 сигнала, полученная базовой станцией 2, содержит величину p2 мощности сигнала и дополнительные характеристики F2, а совокупность этих дополнительных характеристик F2 содержит идентификатор eNB2 базовой станции 2 и время (t2–t0) передачи сигнала; и базовая станция 2 передает характеристики S2 сигнала и принятую информацию (45, 50) о местоположении серверу позиционирования. Совокупность характеристик S3 сигнала, полученная базовой станцией 3, содержит величину p3 мощности сигнала и дополнительные характеристики F3, а совокупность этих дополнительных характеристик F3 содержит идентификатор eNB3 базовой станции 3 и время (t3–t0) передачи сигнала; и базовая станция 3 передает характеристики S3 сигнала и принятую информацию (45, 50) о местоположении серверу позиционирования. Для большей ясности описания далее показаны, с использованием таблицы 1, характеристики сигналов, соответствующие всем базовым станциям.
Таблица 1
|
После передачи информации о местоположении и характеристик сигналов серверу позиционирования путем выполнения операций этапов 301 и 302, этот сервер позиционирования может получить, посредством выполнения операций следующих этапов 303 и 304, набор матриц позиционирования, соответствующий измерительному терминалу. Этот набор матриц позиционирования содержит по меньшей мере одну матрицу позиционирования. Эта матрица позиционирования содержит относительную величину мощности между двумя базовыми станциями и дополнительные характеристики, переданные этими двумя базовыми станциями.
Этап 303: Сервер позиционирования принимает характеристики сигналов и информацию о местоположении, переданные всеми базовыми станциями из состава указанного множества базовых станций, и определяет, согласно характеристикам сигналов, переданным от указанного множества базовых станций, набор относительных величин мощностей, соответствующий рассматриваемому измерительному терминалу.
Этот набор относительных величин мощностей содержит по меньшей мере один элемент. Этот элемент содержит относительную величину мощности между двумя базовыми станциями и идентификаторы этих двух базовых станций.
Этот этап, в частности, содержит следующее: Сервер позиционирования принимает характеристики сигналов и информацию о местоположении, переданные от указанного множества базовых станций; выбирает какие-либо две базовые станции из указанного множества базовых станций и объединяет эти выбранные две базовые станции в подгруппу базовых станций, так что в результате получаются несколько подгрупп базовых станций; для какой-либо подгруппы базовых станций из полученного множества подгрупп базовых станций, отдельно получает, на основе характеристик сигнала, переданных двумя базовыми станциями, образующими эту подгруппу базовых станций, величины мощностей сигналов, переданные этими двумя базовыми станциями, и идентификаторы этих двух базовых станций; и вычисляет разность между величинами мощностей сигналов, переданными указанными двумя базовыми станциями, использует эту разность, полученную в результате вычислений, в качестве относительной величины мощности между рассматриваемыми двумя базовыми станциями, и объединяет эту относительную величину мощности и идентификаторы двух рассматриваемых базовых станций в виде элемента, содержащего указанную относительную величину мощности. Аналогично, для каждой из прочих подгрупп базовых станций, отличных от рассмотренной подгруппы базовых станций в составе множества подгрупп базовых станций, элемент, содержащий относительную величину мощности между двумя базовыми станциями, входящими в каждую из этих прочих подгрупп базовых станций, может быть получен с использованием описанных выше операций. Полученные элементы, содержащие все относительные величины мощностей, объединяют в виде набора относительных величин мощностей, соответствующего измерительному терминалу.
Например, сервер позиционирования принимает характеристики S1 сигнала и информацию (45, 50) о местоположении, переданные базовой станцией 1, принимает характеристики S2 сигнала и информацию (45, 50) о местоположении, переданные базовой станции 2, и принимает характеристик S3 сигнала и информацию о местоположении (45, 50), переданные базовой станцией 3; выбирает какие-либо две базовые станции из совокупности базовых станций 1, 2 и 3, и, если предположить, что выбраны базовые станции 1 и 2, объединяет выбранные базовые станции 1 и 2 в подгруппу базовых станций (1, 2), а также получает подгруппы базовых станций (1, 3) и (2, 3); отдельно получает, на основе характеристик S1 и S2 сигналов, переданных базовыми станциями 1 и 2, входящими в состав подгруппы (1, 2) базовых станций, величины p1 и p2 мощностей сигналов, переданные этими базовыми станциями 1 и 2, а также идентификатор eNB1 базовой станции 1 и идентификатор eNB2 базовой станции 2; вычисляет разность (p1–p2) между величинами p1 и p2 мощностей сигналов, переданными базовыми станциями 1 и 2, использует эту разность (p1–p2), полученную в результате вычислений, в качестве относительной величины мощности между базовыми станциями 1 и 2, и объединяет относительную величину (p1–p2) мощности, идентификатор eNB1 базовой станции 1 и идентификатор eNB2 базовой станции 2 в элемент [(p1–p2), eNB1, eNB2], содержащий указанную относительную величину (p1–p2) мощности; получает, в результате вычислений и по-прежнему с использованием описанных выше операций, элемент [(p1–p3), eNB1, eNB3], содержащий относительную величину (p1–p3) мощности между базовыми станциями 1 и 3, и элемент [(p2–p3), eNB2, eNB3], содержащий относительную величину (p2–p3) мощности между базовыми станциями 2 и 3; и объединяет полученные элементы [(p1–p2), eNB1, eNB2], [(p1–p3), eNB1, eNB3] и [(p2–p3), eNB2, eNB3] в виде набора U1 относительных величин мощностей, соответствующего измерительному терминалу.
Этап 304: Сервер позиционирования отдельно получает, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций, матрицы позиционирования, соответствующие всем относительным величинам мощностей, входящим в состав набора относительных величин мощностей, с целью формирования набора матриц позиционирования, соответствующих измерительному терминалу.
В частности, сервер позиционирования получает элемент из состава набора относительных величин мощностей, получает относительную величину мощности и идентификаторы двух базовых станций из этого элемента, и определяет две базовые станции, соответствующие этим двум идентификаторам базовых станций, в качестве двух базовых станций, соответствующих указанной относительной величине мощности; отдельно получает, на основе совокупности дополнительных характеристик, переданных от указанного множества базовых станций, дополнительные характеристики, переданные найденными двумя базовыми станциями; и объединяет относительную величину мощности и дополнительные характеристики, переданные найденными двумя базовыми станциями, в виде матрицы позиционирования, содержащей относительную величину мощности. Аналогично, для каждого из других элементов, отличных от рассмотренного элемента и входящих в состав указанного набора относительных величин мощностей, матрицу позиционирования, содержащую относительную величину мощности, входящую в состав любого из этих других элементов, можно получить согласно описанным выше операциям. Все полученные матрицы позиционирования объединяют в набор матриц позиционирования, соответствующий измерительному терминалу.
Например, сервер позиционирования получает элемент из набора U1 относительных величин мощностей, и если предположить, что получен элемент [(p1–p2), eNB1, eNB2], получает из этого элемента [(p1–p2), eNB1, eNB2] относительную величину (p1–p2) мощности и два идентификатора eNB1 и eNB2 базовых станций, и определяет базовые станции 1 и 2 соответственно, которым принадлежат эти идентификаторы eNB1 и eNB2, в качестве двух базовых станций, соответствующих относительной величине (p1–p2) мощности; отдельно получает, на основе дополнительных характеристик F1, F2 и F3, переданных базовыми станциями 1, 2 и 3, дополнительные характеристики F1 и F2, переданные этими базовыми станциями 1 и 2; объединяет относительную величину (p1–p2) мощности и дополнительные характеристики F1 и F2, переданные базовыми станциями 1 и 2 в матрицу [(p1–p2), F1, F2] позиционирования, содержащую рассматриваемую относительную величину (p1–p2) мощности; получает, также в соответствии с описанными выше операциями, матрицу [(p1–p3), F1, F3] позиционирования, содержащую указанную относительную величину (p1–p3) мощности, и матрицу [(p2–p3), F2, F3] позиционирования, содержащую относительную величину (p2–p3) мощности; и объединяет полученные матрицы [(p1–p2), F1, F2], [(p1–p3), F1, F3] и [(p2–p3), F2, F3] позиционирования в набор V1 матриц позиционирования, соответствующий измерительному терминалу.
Далее, матрица позиционирования может дополнительно содержать величины мощностей сигнала, переданные двумя базовыми станциями, соответствующими относительной величине мощности в составе этой матрицы позиционирования, и другую подобную информацию.
После получения набора матриц позиционирования, соответствующего измерительному терминалу, путем выполнения этапов 303 и 304 сохраняют указание соответствия между этим набором матриц позиционирования, соответствующим измерительному терминалу, и информацией о местоположении посредством выполнения следующего этапа 305 с целью завершения измерений местоположения для участка, соответствующего информации о местоположении.
Этап 305: Сервер позиционирования сохраняет набор матриц позиционирования, соответствующий измерительному терминалу, и информацию о местоположении этого измерительного терминала с указанием соответствия между набором матриц позиционирования и информацией о местоположении.
Например, сервер позиционирования сохраняет набор V1 матриц позиционирования, соответствующий измерительному терминалу, и информацию (45, 50) о местоположении этого измерительного терминала с указанием соответствия между набором матриц позиционирования и информацией о местоположении, как показано в таблице 2.
Таблица 2
|
Специалист в рассматриваемой области помещает измерительный терминал в каждый участок, полученный в результате разбиения зоны действия радиосвязи, чтобы выполнить измерения местоположения согласно операциям этапов 301 – 305. Услуги сервиса определения местоположения могут быть предоставлены пользователю только после завершения измерений местоположения для всех участков. Когда нужно найти местоположение соответствующего пользователю терминала, местоположение которого нужно определить, как это показано на Фиг. 3-2, информация о местоположении этого терминал, местоположение которого нужно определить, может быть получена путем осуществления операций следующих этапов 306 – 311.
Этап 306: Терминал, местоположение которого нужно определить, передает, в адрес указанного множества базовых станций, в зоне действия которых находится этот терминал, местоположение которого нужно определить, свой идентификатор терминала, зондирующий опорный сигнал и указание момента времени передачи, когда был передан этот зондирующий опорный сигнал.
Когда пользователю нужно использовать сервис определения местоположения посредством применения терминала, этот терминал представляет собой терминал, местоположение которого нужно определить. Этот терминал, местоположение которого нужно определить, передает свой идентификатор и зондирующий опорный сигнал в адрес указанного множества базовых станций, в зоне действия которых находится терминал, местоположение которого нужно определить. Рассматриваемый терминал, местоположение которого нужно определить, получает указание момента времени передачи, когда передан зондирующий опорный сигнал, и передает это указание момента времени передачи в адрес указанного множества базовых станций.
Например, предположим, что совокупность базовых станций, в зоне действия каковых находится терминал, местоположение которого нужно определить, содержит базовые станции 1, 2, 3 и 4. Терминал, местоположение которого нужно определить, передает свой идентификатор phone1 терминала и зондирующий SRS2 опорный сигнал в адрес базовых станций 1, 2, 3 и 4, в зоне действия каковых находится рассматриваемый терминал, местоположение которого нужно определить. Этот терминал, местоположение которого нужно определить, получает указание момента t4 времени передачи, когда был передан зондирующий опорный сигнал SRS2, и передает это указание момента t4 времени передачи в адрес базовых станций 1, 2, 3 и 4.
Этап 307: Все базовые станции из состава указанного множества базовых станций принимают идентификатор терминала, местоположение которого нужно определить, зондирующий опорный сигнал и указание момента времени передачи, переданные терминалом, местоположение которого нужно определить, получают характеристики сигналов согласно зондирующему опорному сигналу и указание момента времени передачи, и передают идентификатор терминала, местоположение которого нужно определить, и полученные характеристики сигнала серверу позиционирования.
Совокупность характеристик сигналов содержит величину мощности зондирующего опорного сигнала, принятого базовой станцией, и дополнительные характеристики. Совокупность этих дополнительных характеристик содержит по меньшей мере идентификатор базовой станции, время передачи сигнала и величину отношения сигнал/шум. Это отношение сигнал/шум представляет собой отношение мощности нормального сигнала, принимаемого базовой станцией, к мощности сигнала шумов, принимаемого этой базовой станцией. В общем случае повышенная величина отношения сигнал/шум обозначает меньшее содержание шумов в сигнале и более высокое качество сигнала.
На этом этапе в общем случае выполняют следующее: Каждая базовая станция из состава указанного множества базовых станций принимает идентификатор терминала, местоположение которого нужно определить, зондирующий опорный сигнал и указание момента времени передачи, переданные терминалом, местоположение которого нужно определить; вычисляет, согласно зондирующему опорному сигналу, величину мощности сигнала и величину отношения сигнал/шум для этого зондирующего опорного сигнала; получает указание момента времени приема, когда принят зондирующий опорный сигнал, вычисляет разность во времени между моментом времени приема и моментом времени передачи, и использует эту разность во времени в качестве времени передачи зондирующего опорного сигнала; объединяет свой идентификатор базовой станции, указание времени передачи сигнала и величину отношения сигнал/шум, полученные в результате вычислений, в виде совокупности дополнительных характеристик; объединяет величину мощности сигнала, полученную в результате вычислений, и дополнительные характеристики в виде характеристик сигнала, соответствующих базовой станции; и передает эти характеристики сигнала и идентификатор терминала, местоположение которого нужно определить, серверу позиционирования. Аналогично, для каждой базовой станции, отличной от этой базовой станции, в указанном множестве базовых станций, могут быть получены характеристики сигнала, и затем эти полученные характеристики сигнала и идентификатор терминала, местоположение которого нужно определить, могут быть переданы серверу позиционирования, в соответствии с описанными выше операциями как это изложено выше.
В технике известен конкретный способ вычисления величины мощности сигнала и отношения сигнал/шум для зондирующего опорного сигнала. Поэтому подробности здесь описаны не будут.
Например, базовая станция 1 принимает идентификатор phone1 терминала, местоположение которого нужно определить, зондирующий опорный сигнал SRS2 и указание момента t4 времени передачи, переданные терминалом, местоположение которого нужно определить; вычисляет, согласно зондирующему опорному сигналу SRS2, величину p4 мощности сигнала и величину отношения SNR1 сигнал/шум для зондирующего опорного сигнала SRS2; получает указание момента t5 времени приема, когда был принят этот зондирующий опорный сигнал SRS2, вычисляет разницу (t5–t4) во времени между моментом t5 времени приема и моментом t4 времени передачи, и использует эту разницу (t5–t4) во времени в качестве времени передачи зондирующего опорного сигнала SRS2; объединяет идентификатор eNB1 базовой станции 1, время (t5–t4) передачи сигнала и величину отношения SNR1 сигнал/шум, полученные в результате вычислений, в совокупность дополнительных характеристик F4; объединяет величину p4 мощности сигнала, полученную в результате вычислений, и дополнительные характеристики F4 в совокупность характеристик S4 сигнала, соответствующую базовой станции 1; и передает характеристики S4 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, серверу позиционирования.
Аналогично, согласно описанным выше операциям, совокупность характеристик S5 сигнала, полученная базовой станцией 2, содержит величину p5 мощности сигнала и дополнительные характеристики F5, а совокупность дополнительных характеристик F5 содержит идентификатор eNB2 базовой станции 2, время (t6–t4) передачи сигнала и величину отношения SNR2 сигнал/шум; и эта базовая станция 2 передает характеристики S5 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, серверу позиционирования. Совокупность характеристик S6 сигнала, полученная базовой станцией 3, содержит величину p6 мощности сигнала и дополнительные характеристики F6, а совокупность дополнительных характеристик F6 содержит идентификатор eNB3 базовой станции 3, время (t7–t4) передачи сигнала и величину отношения SNR3 сигнал/шум; и эта базовая станция 3 передает характеристики S6 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, серверу позиционирования. Совокупность характеристик S7 сигнала, полученная базовой станцией 4, содержит величину p7 мощности сигнала и дополнительные характеристики F7, а совокупность дополнительных характеристик F7 содержит идентификатор eNB4 базовой станции 4, время (t8–t4) передачи сигнала и величину отношения SNR4 сигнал/шум; и эта базовая станция 4 передает характеристики S7 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, серверу позиционирования. Для большей ясности описания, далее показаны, с использованием таблицы 3, характеристики сигналов, соответствующие всем базовым станциям.
Таблица 3
|
Поскольку в процессе передачи сигнал интерферирует и создает взаимные помехи с окружающей средой, величины отношений сигнал/шум для зондирующих опорных сигналов, принимаемых некоторыми базовыми станциями, оказываются исключительно малыми, а качество принимаемого сигнала очень низким. Для повышения точности определения местоположения из указанного множества базовых станций могут быть выбраны эффективные базовые станции, на которых принимаемые сигналы имеют относительно хорошее качество, путем выполнения операций следующего этапа 308.
Этап 308: Сервер позиционирования принимает характеристики сигналов и идентификатор терминала, местоположение которого нужно определить, переданные от указанного множества базовых станций, и выбирает эффективные базовые станции их указанного множества базовых станций в соответствии с характеристиками сигналов, переданными от указанного множества базовых станций.
Здесь эффективная базовая станция представляет собой базовую станцию, для которой величина отношения сигнал/шум удовлетворяет заданному условию. Это заданное условие может требовать выбора базовых станций, для которых величина отношения сигнал/шум превышает заданный порог, в качестве эффективных базовых станций, либо заданное условие может требовать выбора заданного числа базовых станций с максимальными величинами отношений сигнал/шум в качестве эффективных базовых станций.
В зависимости от разных заданных условий этот этап может быть осуществлен первым или вторым способом, а именно:
Согласно первому способу сервер позиционирования принимает характеристики сигналов и идентификатор терминала, местоположение которого нужно определить, переданные от указанного множества базовых станций; отдельно получает, из состава характеристик сигналов, переданных от указанного множества базовых станций, величины отношений сигнал/шум, переданные всеми базовыми станциями из состава указанного множества базовых станций; и по отдельности сравнивает величины отношений сигнал/шум, переданные всеми базовыми станциями из состава указанного множества базовых станций, с заданным порогом, с целью выбрать базовые станции, для которых величины отношений сигнал/шум больше заданного порога, в качестве эффективных базовых станций.
Например, сервер позиционирования принимает характеристики S4 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, переданные базовой станцией 1, принимает характеристики сигнала S5 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, переданные базовой станцией 2, принимает характеристики S6 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, переданные базовой станцией 3, и принимает характеристики S7 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, переданные базовой станцией 4; по отдельности получает, на основе характеристик S4, S5, S6 и S7 сигналов, переданных базовыми станциями 1, 2, 3 и 4, величины отношений SNR1, SNR2, SNR3 и SNR4 сигнал/шум, переданные базовыми станциями 1, 2, 3 и 4; по отдельности сравнивает эти величины отношений сигнал/шум, переданные базовыми станциями 1, 2, 3 и 4, с заданным порогом; и если предположить, что величины отношений сигнал/шум для базовых станций 1, 2 и 3 все превосходят заданный порог, а величина отношения сигнал/шум для базовой станции 4 меньше заданного порога, сервер выбирает базовые станции 1, 2 и 3, для которых величины отношений сигнал/шум превышают заданный порог, в качестве эффективных базовых станций.
Согласно второму способу, сервер позиционирования принимает характеристики сигналов и идентификатор терминала, местоположение которого нужно определить, переданные от указанного множества базовых станций; по отдельности получает из состава характеристик сигналов, переданных от указанного множества базовых станций, величины отношений сигнал/шум, переданные всеми базовыми станциями из состава указанного множества базовых станций; сортирует эти величины отношений сигнал/шум, переданные всеми базовыми станциями из состава указанного множества базовых станций, согласно заданному порядку; получает заданное число максимальных величин отношений сигнал/шум из всех рассортированных величин отношений сигнал/шум; и выбирает, из указанного множества базовых станций, те базовые станции, которым соответствуют полученные величины отношений сигнал/шум, в качестве эффективных базовых станций.
Указанный заданный порядок может представлять собой сортировку в порядке убывания или сортировку в порядке возрастания. Величины отношений сигнал/шум сортируют в порядке убывания, и затем выбирают указанное заданное число величин отношений сигнал/шум, начиная от первой величины отношения сигнал/шум из списка рассортированных величин отношений сигнал/шум.
Например, предположим, что заданным порядком сортировки является сортировка в порядке убывания, и что заданное число станций равно 3. Сервер позиционирования принимает характеристики S4 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, переданные базовой станцией 1, принимает характеристики S5 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, переданные базовой станцией 2, принимает характеристики S6 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, переданные базовой станцией 3, и принимает характеристики S7 сигнала и идентификатор phone1 терминала, местоположение которого нужно определить, переданные базовой станцией 4; по отдельности получает, из совокупности S4, S5, S6 и S7 характеристик сигналов, переданных базовыми станциями 1, 2, 3 и 4, величины отношений SNR1, SNR2, SNR3 и SNR4 сигнал/шум, переданные базовыми станциями 1, 2, 3 и 4; сортирует величины отношений сигнал/шум, переданные базовыми станциями 1, 2, 3 и 4, в порядке убывания; и если предположить, что в результате сортировки величины отношений сигнал/шум расставлены в следующем порядке SNR2, SNR3, SNR1 и SNR4, сервер получает три величины отношений сигнал/шум, начиная от величины SNR2 отношения сигнал/шум, первой в списке рассортированных величин отношений сигнал/шум, иными словами, получает величины отношений сигнал/шум по порядку SNR2, SNR3 и SNR1, и выбирает, из указанного множества базовых станций, базовые станции 2, 3, и 1, соответствующие этим полученным величинам SNR2, SNR3 и SNR1 отношений сигнал/шум, в качестве эффективных базовых станций.
После выбора эффективных базовых станций путем выполнения операций этапа 308, набор матриц позиционирования, соответствующий терминалу, местоположение которого нужно определить, может быть получен посредством выполнения операций следующих этапов 309 и 310.
Этап 309: Сервер позиционирования получает, на основе совокупности характеристик сигналов, переданных эффективными базовыми станциями, набор относительных величин мощностей, соответствующий терминалу, местоположение которого нужно определить.
В частности, сервер позиционирования выбирает какие-либо две базовые станции из найденной совокупности эффективных базовых станций и объединяет выбранные две базовые станции в подгруппу базовых станций, с целью получения нескольких подгрупп базовых станций; для какой-либо подгруппы базовых станций из состава полученного множества подгрупп базовых станций отдельно получает, из совокупности характеристик сигналов, переданных этими двумя базовыми станциями, входящими в рассматриваемую подгруппу базовых станций, величины мощностей сигналов, переданные этими двумя базовыми станциями, и идентификаторы указанных двух базовых станций; и вычисляет разность между величинами мощностей сигналов, переданными этими двумя базовыми станциями, использует эту разность, полученную в результате вычислений, в качестве относительной величины мощности между рассматриваемыми двумя базовыми станциями, и объединяет эту относительную величину мощности и идентификаторы двух соответствующих базовых станций в виде элемента, содержащего рассматриваемую относительную величину мощности. Аналогично, для каждой из прочих подгрупп базовых станций, отличных от рассмотренной подгруппы базовых станций, в составе указанного множества подгрупп базовых станций, элемент, содержащий относительную величину мощности между этими двумя базовыми станциями, образующими рассматриваемую одну из прочих подгрупп базовых станций, может быть получен в соответствии с описанными выше операциями. Полученные элементы, содержащие все относительные величины мощностей, объединяют в набор относительных величин мощностей, соответствующий терминалу, местоположение которого нужно определить.
Например, сервер позиционирования выбирает какие-либо две базовые станции из найденной совокупности эффективных базовых станций 1, 2 и 3, и если предположить, что выбраны базовые станции 1 и 2, объединяет выбранные базовые станции 1 и 2 в подгруппу (1, 2) базовых станций, а также получает подгруппы (1, 3) и (2, 3) базовых станций; отдельно получает из совокупности характеристик S4 и S5 сигналов, переданных базовыми станциями 1 и 2, входящими в состав подгруппы (1, 2) базовых станций, величины p4 и p5 мощностей сигналов, переданные базовыми станциями 1 и 2, и идентификатор eNB1 базовой станции 1 и идентификатор eNB2 базовой станции 2; вычисляет разность (p4–p5) между величинами p4 и p5 мощностей сигналов, переданных базовыми станциями 1 и 2, использует эту разность (p4–p5), полученную в результате вычислений, в качестве относительной величины мощности между базовыми станциями 1 и 2, и объединяет эту относительную величину (p4–p5) мощности, идентификатор eNB1 базовой станции 1 и идентификатор eNB2 базовой станции 2 в элемент [(p4–p5), eNB1, eNB2], содержащий относительную величину (p4–p5) мощности; получает в результате вычислений, а также в соответствии с описанными выше операциями, элемент [(p4–p6), eNB1, eNB3], содержащий относительную величину (p4–p6) мощности между базовыми станциями 1 и 3, и элемент [(p5–p6), eNB2, eNB3], содержащий относительную величину (p5–p6) мощности между базовыми станциями 2 и 3; и объединяет полученные элементы [(p4–p5), eNB1, eNB2], [(p4–p6), eNB1, eNB3] и [(p5–p6), eNB2, eNB3] в набор U2 относительных величин мощностей, содержащий терминал, местоположение которого нужно определить.
Этап 310: Сервер позиционирования отдельно получает, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций, матрицы позиционирования, соответствующие всем относительным величинам мощностей, входящим в состав набора относительных величин мощностей, с целью формирования набора матриц позиционирования, соответствующего терминалу, местоположение которого нужно определить.
В частности, сервер позиционирования получает элемент из состава набора относительных величин мощностей, получает относительную величину мощности и два идентификатора базовых станций из этого элемента и определяет две базовые станции, соответствующие этим двум идентификаторам, в качестве двух базовых станций, соответствующих полученной относительной величине мощности; отдельно получает, из совокупности дополнительных характеристик, переданных от указанного множества базовых станций, дополнительные характеристики, переданные этими двумя базовыми станциями; и объединяет эту относительную величину мощности и дополнительные характеристики, переданные найденными двумя базовыми станциями, в матрицу позиционирования, содержащую рассматриваемую относительную величину мощности. Аналогично, для каждого из прочих элементов, отличного от элемента, входящего в рассматриваемый набор относительных величин мощностей, матрица позиционирования, содержащая относительную величину мощности, входящую в состав этого прочего элемента, может быть получена в соответствии с описанными выше операциями. Все полученные матрицы позиционирования объединяют в набор матриц позиционирования, соответствующий измерительному терминалу, местоположение которого нужно определить.
Например, сервер позиционирования получает элемент из набора U2 относительных величин мощностей, и если предположить, что получен элемент [(p4–p5), eNB1, eNB2], получает, из этого элемента [(p4–p5), eNB1, eNB2], относительную величину мощности (p4–p5) и два идентификатора eNB1 и eNB2 базовых станций, и определяет базовые станции 1 и 2, соответствующие найденным идентификаторам eNB1 и eNB2 базовых станций, в качестве двух базовых станций, соответствующих относительной величине (p4–p5) мощности; отдельно получает, на основе совокупности дополнительных характеристик F4, F5, F6 и F7, переданных базовыми станциями 1, 2, 3 и 4, дополнительные характеристики F4 и F5, переданные базовыми станциями 1 и 2; объединяет относительную величину (p4–p5) мощности и дополнительные характеристики F4 и F5, переданные базовыми станциями 1 и 2, в матрице [(p4–p5), F4, F5] позиционирования, содержащей относительную величину (p4–p5) мощности; получает, также согласно описанным выше операциям, матрицу [(p4–p6), F4, F6] позиционирования, содержащую относительную величину (p4–p6) мощности, и матрицу [(p5–p6), F5, F6] позиционирования, содержащую относительную величину (p5–p6) мощности; и объединяет полученные матрицы [(p4–p5), F4, F5], [(p4–p6), F4, F6] и [(p5–p6), F5, F6] позиционирования в наборе V2 матриц позиционирования, соответствующем терминалу, местоположение которого нужно определить.
После получения набора матриц позиционирования, соответствующего терминалу, местоположение которого нужно определить, с использованием операций этапов 309 и 310, получают информацию о местоположении терминала, местоположение которого нужно определить, и передают найденную информацию о местоположении, терминалу, местоположение которого нужно определить, посредством выполнения операций следующего этапа 311.
Этап 311: Сервер позиционирования определяет, согласно набору матриц позиционирования, соответствующему терминалу, местоположение которого нужно определить, информацию о местоположении, соответствующую рассматриваемому терминалу, местоположение которого нужно определить, и передает найденную информацию о местоположении указанному терминалу, местоположение которого нужно определить.
В частности, сервер позиционирования получает, на основе хранящегося в памяти соответствия между набором матриц позиционирования и информацией о местоположении, все наборы матриц позиционирования, входящие в состав этого соответствия, и отдельно вычисляет сходство между набором матриц позиционирования, соответствующим терминалу, местоположение которого нужно определить, и всеми полученными наборами матриц позиционирования, с целью определения набора матриц позиционирования с максимальным сходством; определяет соответствующую информацию о местоположении согласно набору матриц позиционирования и на основе указанного соответствия между набором матриц позиционирования и информацией о местоположении, и определяет эту информацию о местоположении в качестве информации о местоположении, соответствующей терминалу, местоположение которого нужно определить; и передает найденную информацию о местоположении терминалу, местоположение которого нужно определить, согласно идентификатору этого терминала, местоположение которого нужно определить.
Например, сервер позиционирования получает, на основе сохраняемого соответствия между набором матриц позиционирования и информацией о местоположении, показанного в таблице 1, наборы V1 и V3 матриц позиционирования, указанные в этом соответствии, по отдельности вычисляет подобие между набором матриц позиционирования V2, соответствующим терминалу, местоположение которого нужно определить, и полученными наборами матриц позиционирования V1 и V3; и если предположить, что степень подобия между наборами V2 и V1 равна 0.95, а степень подобия между наборами V2 и V3 равна 0.5, определяет, что набором матриц позиционирования с максимальным подобием является набор V1, определяет соответствующую информацию о местоположении (45, 50) согласно набору V1 матриц позиционирования и на основе соответствия между набором матриц позиционирования и информацией о местоположении, показанного в таблице 1, определяет информацию (45, 50) о местоположении в качестве информации о местоположении, соответствующей терминалу, местоположение которого нужно определить, и передает информацию (45, 50) о местоположении терминалу, местоположение которого нужно определить, согласно идентификатору phone1 терминала, местоположение которого нужно определить.
В этом варианте настоящего изобретения принимают характеристики сигналов и идентификатор терминала, местоположение которого нужно определить, переданные всеми базовыми станциями из состава указанного множества базовых станций, где совокупность характеристик сигнала от любой базовой станции содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор рассматриваемой базовой станции и время передачи сигнала; определяют набор относительных величин мощностей согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, где указанный набор относительных величин мощностей содержит относительную величину мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций; и определяют информацию о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить, согласно набору относительных величин мощностей и совокупностью дополнительных характеристик, переданным от указанного множества базовых станций. Указанный набор относительных величин мощностей получают согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, и получают информацию о местоположении терминала, местоположение которого нужно определить, согласно набору относительных величин мощностей и совокупности дополнительных характеристик, переданным от указанного множества базовых станций. Поэтому получение информации о местоположении с использованием относительной величины мощности позволяет избежать нежелательного влияния различия мощностей передач терминалов и значительно уменьшить погрешность получения информации о местоположении.
Вариант 4
На Фиг. 4 представлен вариант настоящего изобретения, предлагающий устройство для получения информации о местоположении. Устройство содержит запоминающее устройство 401 и процессор 402 и конфигурирована для осуществления следующего способа получения информации о местоположении. Способ содержит:
прием совокупности характеристик сигналов и идентификатора терминала, местоположение которого нужно определить, переданных всеми базовыми станциями из состава указанного множества базовых станций, где совокупность характеристик сигнала для какой-либо базовой станции содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор рассматриваемой базовой станции и время передачи сигнала;
определение набора относительных величин мощностей согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, где этот набор относительных величин мощностей содержит относительную величину мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций; и
определение, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций, информации о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить.
Процедура определения набора относительных величин мощностей согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, содержит:
вычисление разности между величиной мощности сигнала, переданной первой базовой станцией, и величиной мощности сигнала, переданной второй базовой станцией, где первая базовая станция представляет собой какую-либо базовую станцию из совокупности нескольких базовых станций, и вторая базовая станция представляет собой какую-либо базовую станцию, отличную от первой базовой станции, из указанного множества базовых станций; и
определение этой разности в качестве относительной величины мощности между первой базовой станцией и второй базовой станцией, и добавление этой относительной величины мощности к набору относительных величин мощностей.
Процедура определения, согласно набору набор относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций, информации о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить, содержит:
отдельно получение, согласно набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощностей, входящим в состав этого набора относительных величин мощностей, с целью формирования набора матриц позиционирования; и
определение, согласно этому набору матриц позиционирования и на основе соответствия между набором матриц позиционирования и информацией о местоположении, информации о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить.
Процедура отдельного получения, согласно набору относительных величин мощностей и совокупности дополнительных характеристик, переданных от указанного множества базовых станций, матриц позиционирования, соответствующих всем относительным величинам мощностей, входящим в состав этого набора относительных величин мощностей, содержит:
определение двух базовых станций, соответствующих первой относительной величине мощности, где эта первая относительная величина мощности представляет собой какую-либо из относительных величин мощности, входящих в состав рассматриваемого набора относительных величин мощностей;
отдельное получение, на основе совокупности дополнительных характеристик, переданных от указанного множества базовых станций, дополнительных характеристик, переданных этими двумя базовыми станциями; и
и объединение первой относительной величины мощности и дополнительных характеристик, переданных найденными двумя базовыми станциями, в составе матрицы позиционирования, соответствующей этой первой относительной величине мощности.
Далее, прежде приема характеристик сигналов и идентификатора терминала, местоположение которого нужно определить, какие переданы от указанного множества базовых станций, способ дополнительно содержит:
получение информации о местоположении измерительного терминала;
прием совокупности характеристик сигналов, переданных от указанного множества базовых станций, где эта совокупность характеристик сигналов содержит величину мощности сигналов и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор базовой станции и время передачи сигнала;
получение, согласно совокупности характеристик сигналов, переданных от указанного множества базовых станций, набора матриц позиционирования, соответствующего измерительному терминалу; и
сохранение полученного набора матриц позиционирования и информации о местоположении измерительного терминала с указанием соответствия между набором матриц позиционирования и информацией о местоположении.
Процедура получения, согласно совокупности характеристик сигналов, переданной от указанного множества базовых станций, набора матриц позиционирования, соответствующего измерительному терминалу, содержит:
вычисление относительной величины мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, с целью формирования набора относительных величин мощностей; и
отдельное получение, согласно набору относительных величин мощностей и совокупности дополнительных характеристик, переданным от указанного множества базовых станций, матриц позиционирования, соответствующим всем относительным величинам мощностей, входящим в состав созданного набора относительных величин мощностей, с цель формирования набора матриц позиционирования, соответствующих измерительному терминалу.
Совокупность дополнительных характеристик содержит далее величину отношения сигнал/шум.
Процедура определения набора относительных величин мощностей согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, содержит:
выбор эффективных базовых станций из указанного множества базовых станций согласно величинам отношений сигнал/шум, входящим в состав совокупности дополнительных характеристик, переданных всеми базовыми станциями из состава указанного множества базовых станций; и
вычисление относительной величины мощности между какими-либо двумя эффективными базовыми станциями из состава совокупности эффективных базовых станций в соответствии с величинами мощностей сигналов, переданными этими эффективными базовыми станциями, с целью формирования набора относительных величин мощностей.
Процедура выбора эффективных базовых станций из состава указанного множества базовых станций согласно величинам отношений сигнал/шум, входящим в состав совокупности дополнительных характеристик, переданных всеми базовыми станциями из состава указанного множества базовых станций, содержит:
отдельно сравнение величин отношений сигнал/шум, переданных всеми базовыми станциями из состава указанного множества базовых станций, с заданным порогом; и
выбор базовых станций, для которых величины отношений сигнал/шум превышают заданный порог, в качестве эффективных базовых станций.
Процедура выбора эффективных базовых станций из указанного множества базовых станций согласно величинам отношений сигнал/шум, входящих в совокупность дополнительных характеристик, переданных всеми базовыми станциями из состава указанного множества базовых станций, содержит:
сортировку величин отношений сигнал/шум, переданных всеми базовыми станциями из состава указанного множества базовых станций, согласно заданному порядку;
получение заданного числа максимальных величин отношений сигнал/шум из всей совокупности рассортированных величин отношений сигнал/шум; и
выбор, из указанного множества базовых станций, тех базовых станций, которые соответствуют полученным величинам отношений сигнал/шум, в качестве эффективных базовых станций.
В рассматриваемом варианте настоящего изобретения принимают совокупность характеристик сигналов и идентификатор терминал, местоположение которого нужно определить, переданные всеми базовыми станциями из состава указанного множества базовых станций, где совокупность характеристик сигнала от базовой станции содержит величину мощности сигнала и дополнительные характеристики, а совокупность дополнительных характеристик содержит по меньшей мере идентификатор этой базовой станции и время передачи сигнала; определяют набор относительных величин мощностей согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, где этот набор относительных величин мощностей содержит относительную величину мощности между какими-либо двумя базовыми станциями из состава указанного множества базовых станций; и определяют информацию о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить, согласно указанному набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций. Указанный набор относительных величин мощностей получают согласно величинам мощностей сигналов, переданным от указанного множества базовых станций, и получают информацию о местоположении терминала, соответствующего идентификатору терминала, местоположение которого нужно определить, согласно этому набору относительных величин мощностей и дополнительным характеристикам, переданным от указанного множества базовых станций. Поэтому получение информации о местоположении с использованием относительной величины мощности позволяет избежать нежелательного влияния различия мощностей передач терминалов и значительно уменьшить погрешность получения информации о местоположении.
Даже рядовой специалист в рассматриваемой области может понять, что все или некоторые этапы предлагаемых вариантов могут быть осуществлены посредством устройства или программы, управляющей работой соответствующего устройства. Эта программа может быть сохранена на компьютерном носителе информации. Такой компьютерный носитель информации может представлять собой: постоянное запоминающее устройство, магнитный диск или оптический диск.
Приведенное выше описание представляет всего лишь примеры вариантов настоящего изобретения, но не имеет целью как-то ограничить настоящее изобретение. Любые модификации, эквивалентные замены или усовершенствования, сделанные без отклонения от смысла и принципов настоящего изобретения, попадут в пределы объема защиты изобретения.
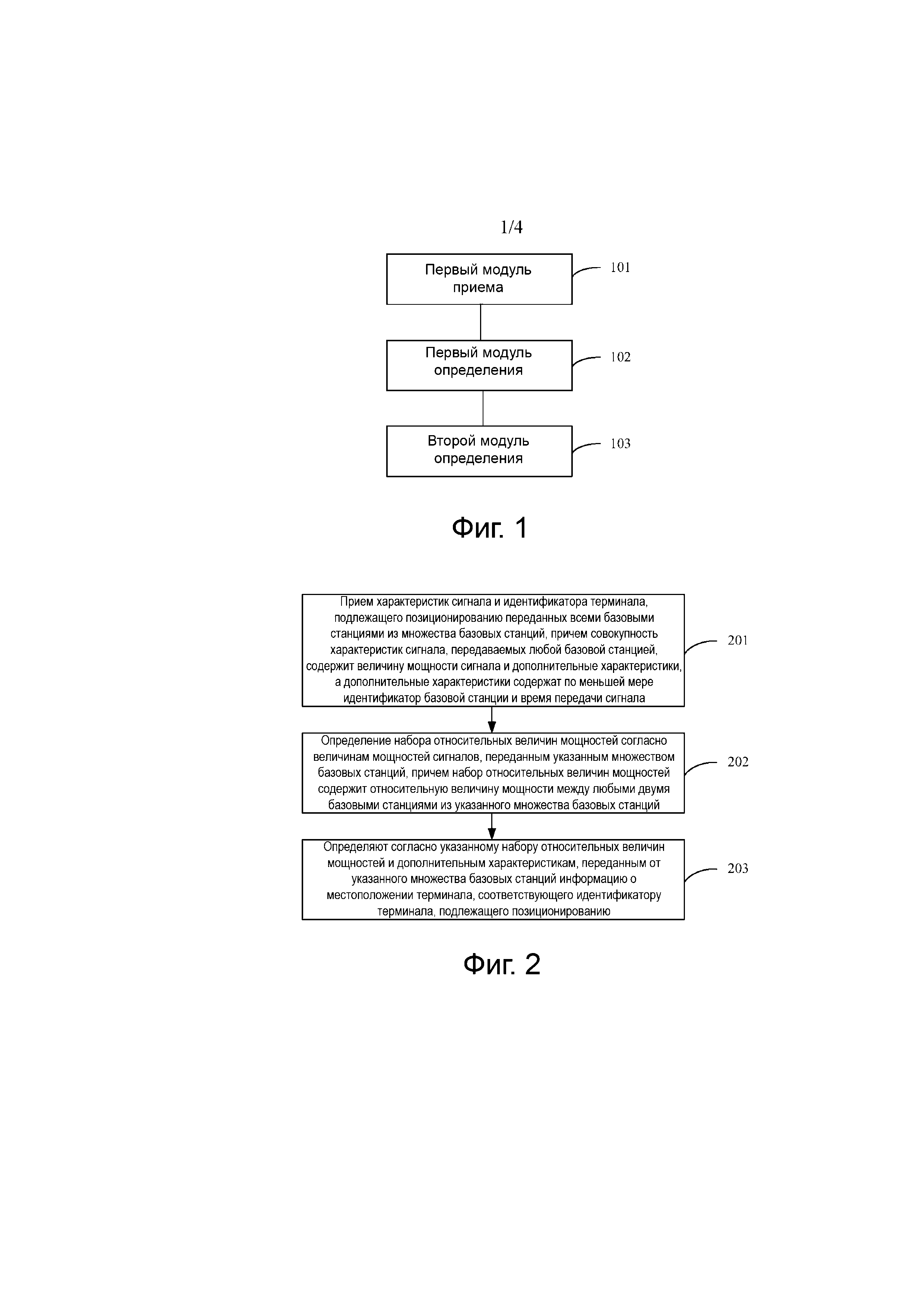
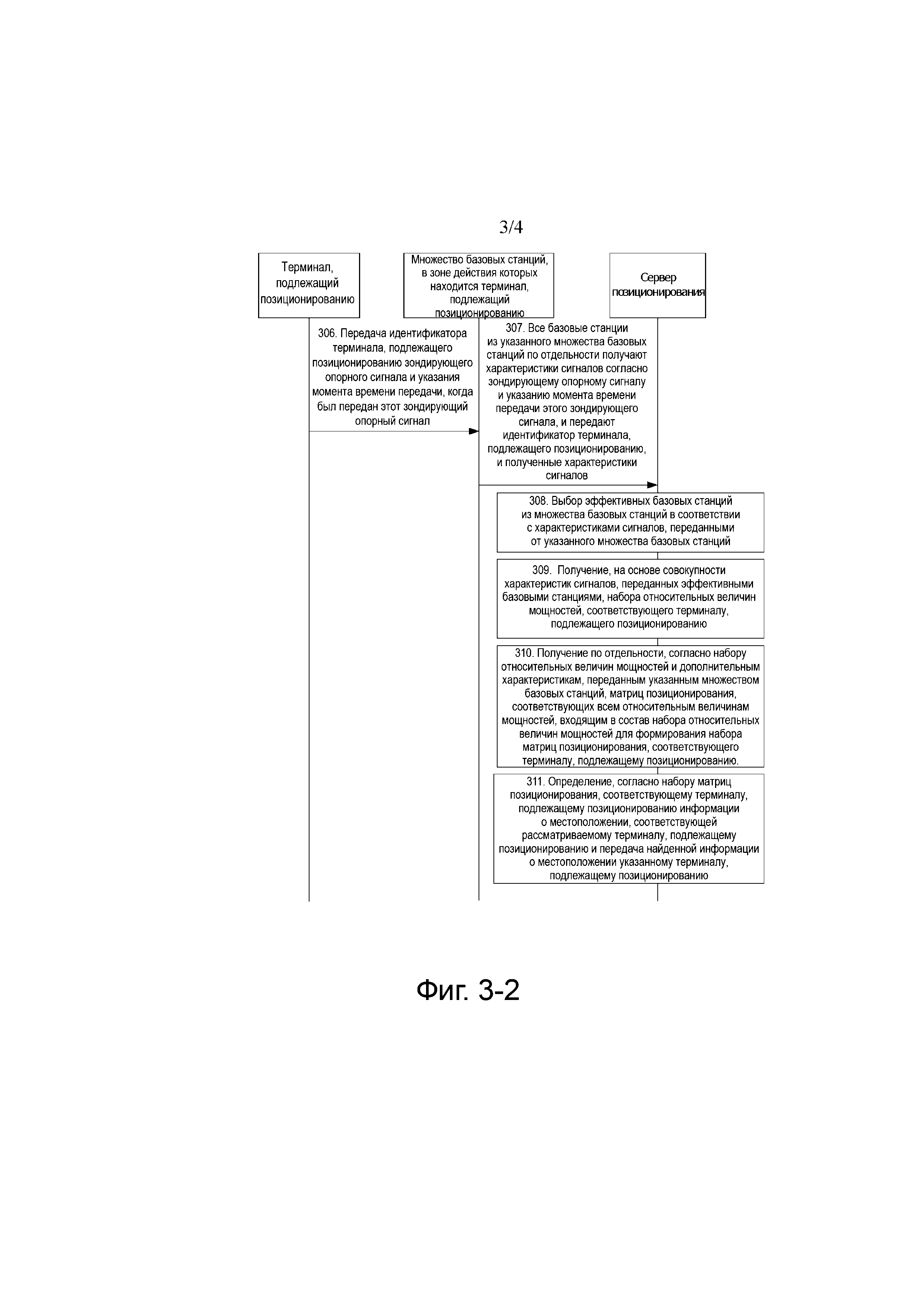
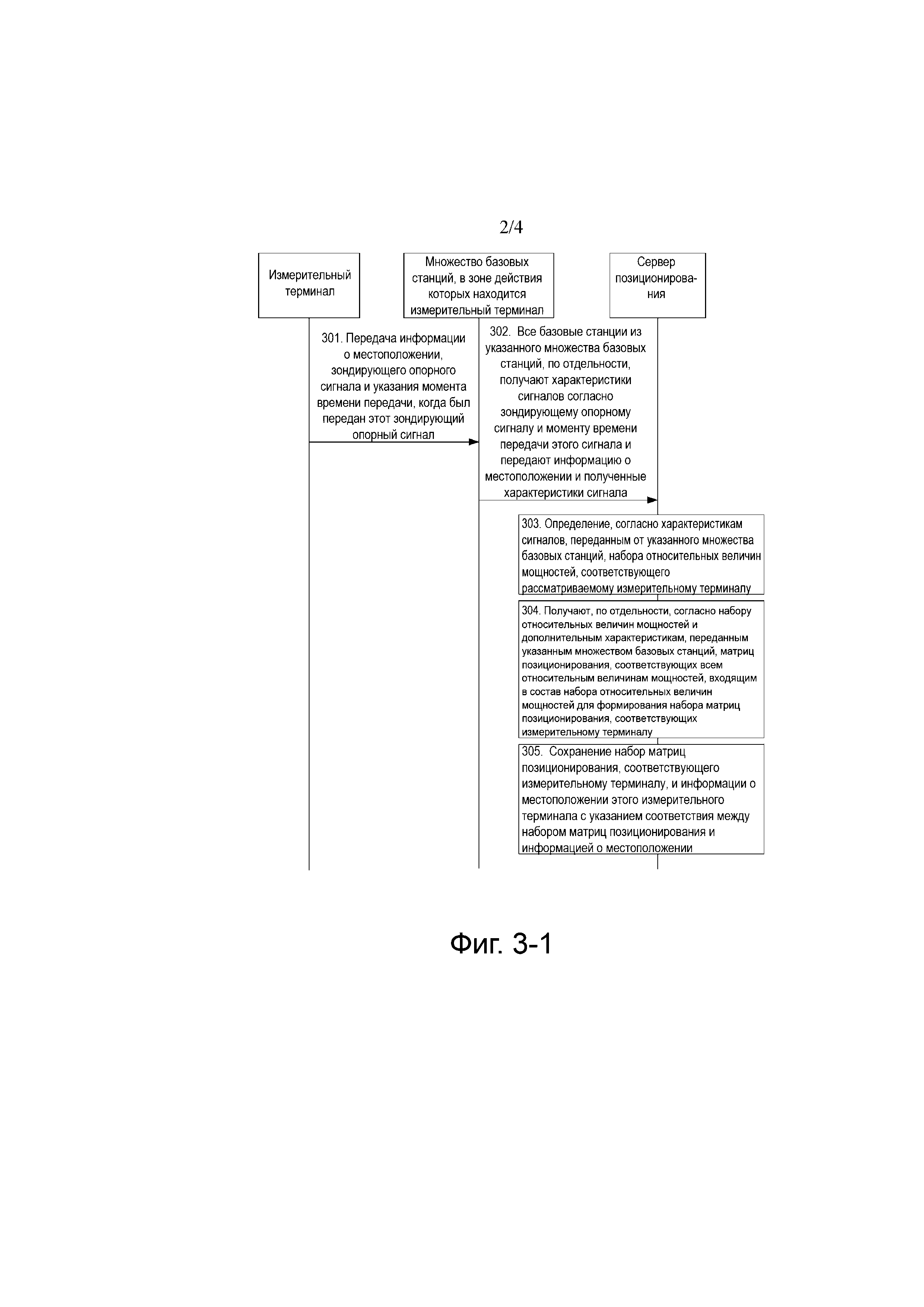
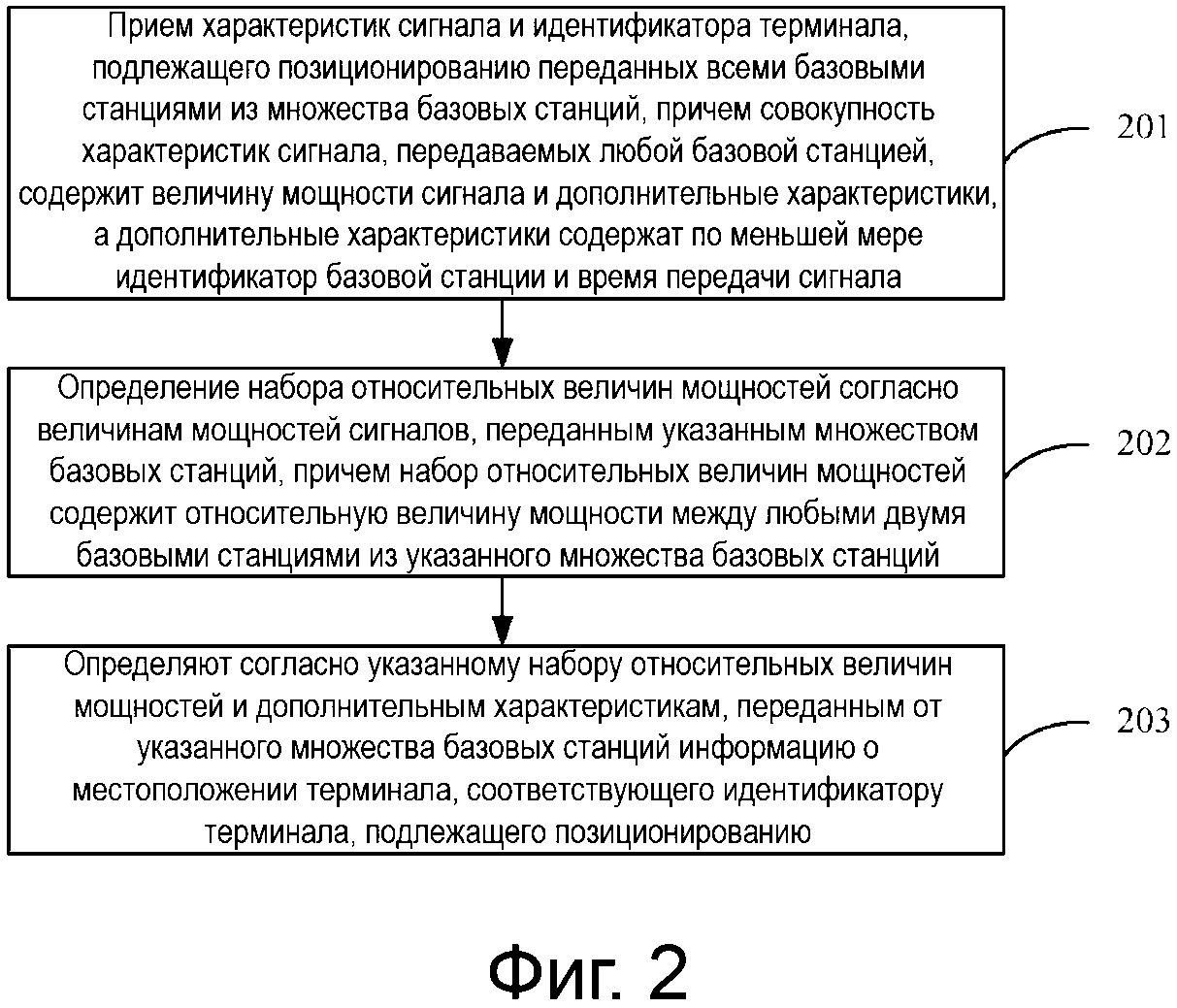
Способ и устройство для реализации кольца совместно используемой защиты блока данных оптического канала
Способ регулировки полосы пропускания канала oduflex без потерь и канал oduflex
Способ и устройство для передачи данных полупостоянного планирования
Способ, устройство и система для передачи информационных битов
Способ и устройство для распознавания оптического разветвителя и портов оптического разветвителя
Устройство обработки сигналов и способ обработки сигналов
Способ, устройство и система для инициализации когнитивной системы с поддержкой когнитивным пилотным каналом
Фильтрующее устройство
Кластерный маршрутизатор и способ кластерной маршрутизации
Система и способ мультиплексирования каналов управления и данных в системе связи с множеством входов и множеством выходов (mimo)
Способ идентификации вида замыкания в линии электропередачи
Способ и устройство обнаружения асимметрии задержки канала передачи данных
Способ, устройство и система для установления соединения радиорелейной станции с базовой станцией
Способ синхронизации для дифференциально-токовой защиты
Способ и устройство дистанционной защиты от замыканий на землю
Способ и устройство для определения состояния мобильности терминала
Способ и устройство для идентификации короткого замыкания посредством дифференциальной токовой защиты
Полудуплексный способ дуплексной связи с частотным разделением, базовая станция и терминал

