Результат интеллектуальной деятельности: Электромеханическая кисть
Вид РИД
Изобретение
Изобретение относится к медицинской технике, а именно к протезированию и протезостроению, и может быть использовано для протезирования инвалидов после односторонней или двусторонней ампутации руки на уровне предплечья, а также в протезе плеча и в протезах после вычленения плеча.
Известен протез кисти (RU 2472469 C1, МПК: A61F 2/54 (2006.01), опубл. 20.01.2013), содержащий корпус, первый палец, блок второго-третьего пальцев, рычажную передачу и привод функции подвижности «схват-раскрытие кисти», механизм отведения-приведения второго пальца, содержащий микроэлектропривод с винтовой передачей, обеспечивающей возможность возвратно-поступательного движения гайки, при этом привод неподвижно соединен с основанием блока пальцев, а каркас второго пальца выполнен в виде двуплечего рычага и шарнирно установлен на основании блока пальцев, причем одно плечо рычага формирует консоль второго пальца, а второе плечо выполнено в виде вилки и кинематически соединено с гайкой винтовой передачи. Недостатком данного устройства являются низкие функциональные возможности, а также заклинивание механизма схвата в крайних положениях.
Известен протез кисти, принятый за прототип (RU 2506931 В2, МПК: A61F 2/56 (2006.01), опубл. 10.02.2014), содержащий корпус, приемную гильзу, закрепленную на корпусе, каркасы первого, второго, третьего, четвертого пальцев и пятый палец, выполненный в виде упругого звена, механизм движения кисти с микроэлектроприводами.
Недостатком данного устройства являются низкие функциональные возможности и длительное время выполнения двигательных операций.
Задачей предлагаемого изобретения является создание электромеханического протеза кисти для протезирования инвалидов после односторонней или двухсторонней ампутации руки на уровне предплечья, а также в протезе плеча и после вычленения плеча, повышающего удобство пользования протезом за счет расширения функциональных возможностей устройства.
Техническим результатом является сокращение времени выполнения двигательных операций при пользовании протезом путем сохранения естественной функции ротации кисти, надежного удержания объектов манипулирования за счет обеспечения двухстороннего силового контроля за движением первого и второго пальцев с одновременной установкой третьего пальца по поверхности предметов сложной формы, а также обеспечения схвата между вторым и третьим пальцем.
Указанный технический результат достигается тем, что в электромеханическом протезе кисти для протезирования руки на уровне предплечья, содержащем корпус, приемную гильзу, каркасы первого, второго, третьего, четвертого пальцев и пятый палец, выполненный в виде упругого звена, механизм движения кисти с микроэлектроприводами, каркас первого пальца закреплен на первой оси вращения, каркас третьего пальца и каркас четвертого пальца закреплены на второй оси вращения, причем первая ось вращения и вторая ось вращения крепятся неподвижно в корпусе, при этом каркас второго пальца закреплен в каркасе третьего пальца при помощи третьей оси вращения, а каркас четвертого пальца и пятый палец выполнены в виде единого блока, в котором облицовка каркаса четвертого пальца выполнена за одно целое с облицовкой пятого пальца, причем механизм движения кисти выполнен в виде механизма схвата, механизма отведения и механизма ротации, при этом механизм схвата выполнен в виде первого микроэлектропривода, снабженного микроконтроллером механизма схвата и исполнительным органом механизма схвата первого, второго и третьего каркасов пальцев, при этом первый микроэлектропривод и микроконтроллер механизма схвата расположены в корпусе механизма схвата, при этом корпус механизма схвата жестко крепится в корпусе, а механизм отведения выполнен в виде второго микроэлектропривода, закрепленного на каркасе третьего пальца и снабженного микроконтроллером механизма отведения и исполнительным органом механизма отведения второго от третьего каркаса пальцев, при этом микроконтроллер механизма отведения расположен на корпусе механизма схвата, а механизм ротации выполнен в виде третьего микроэлектропривода, снабженного микроконтроллером механизма ротации и исполнительным органом механизма ротации кисти, причем третий микроэлектропривод и микроконтроллер механизма ротации закреплены внутри корпуса механизма ротации, при этом приемная гильза закреплена на корпусе механизма ротации, причем корпус механизма ротации жестко прикреплен к корпусу, при этом все три микроэлектропривода связаны с системой управления кистью, закрепленной на блоке автономного питания, размещенном на корпусе механизма ротации и снабженном устройством управления блоком автономного питания, при этом на приемной гильзе установлены электроды съема сигнала мышечной активности, связанные с системой управления кистью, которая связана с микроконтроллером механизма схвата, микроконтроллером механизма отведения и микроконтроллером механизма ротации.
При этом на внешней части корпуса выполнена крышка.
При этом каркасы первого, второго, третьего, четвертого пальцев представляют собой т-образный профиль в поперечном сечении.
Сущность изобретения поясняется чертежами.
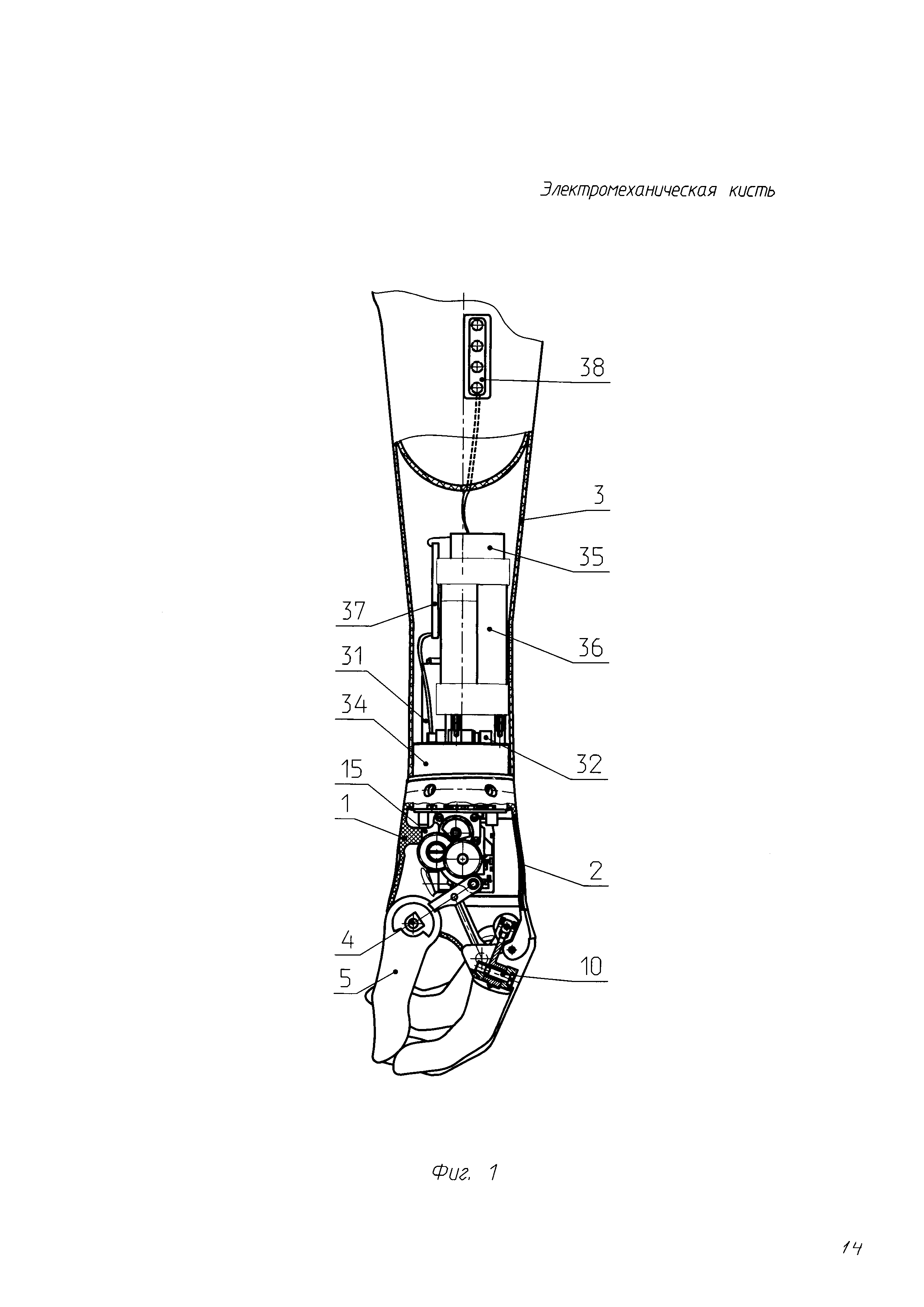
На фиг. 1 изображена электромеханическая кисть, вид сбоку.
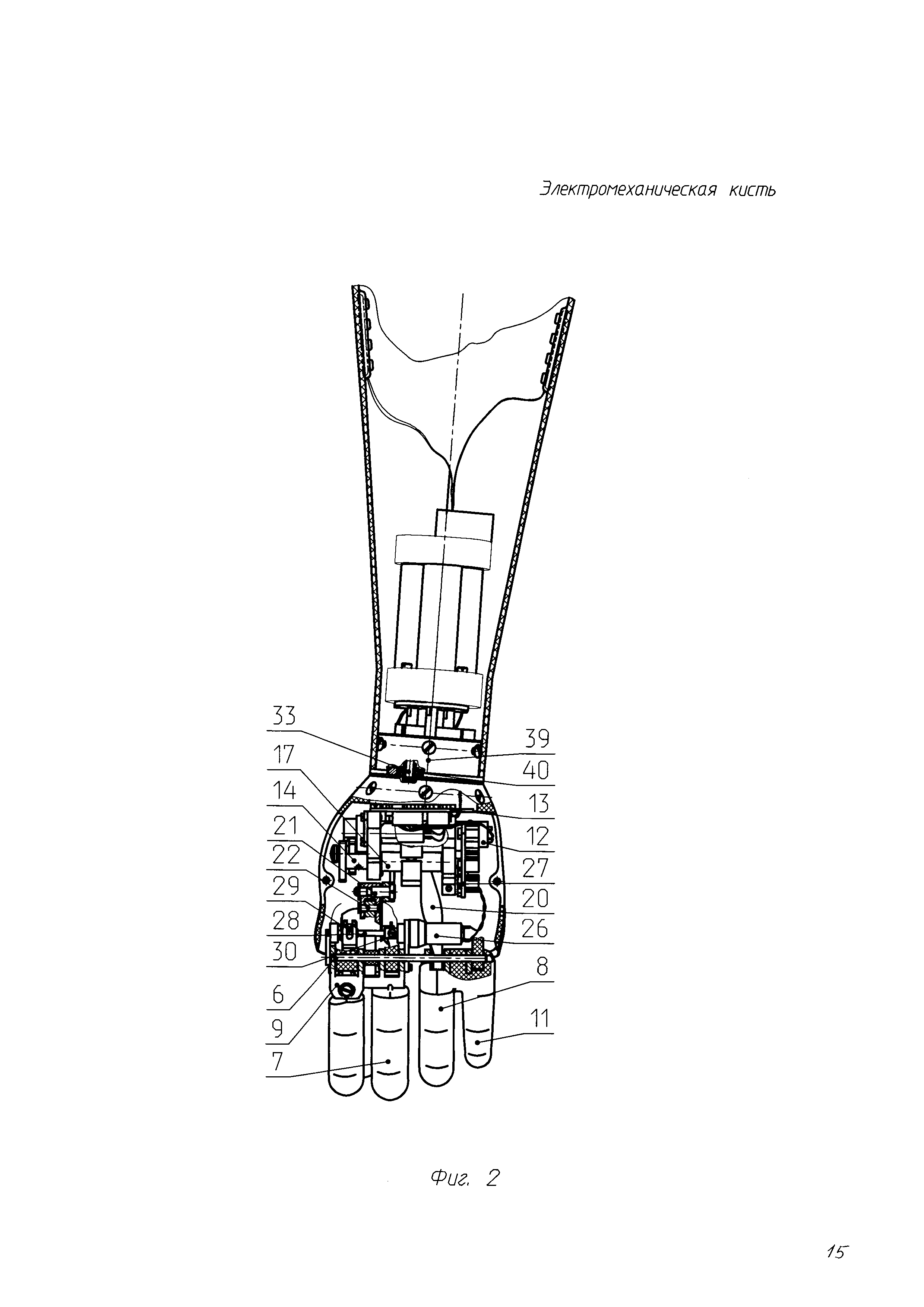
На фиг. 2 изображена электромеханическая кисть, вид сверху.
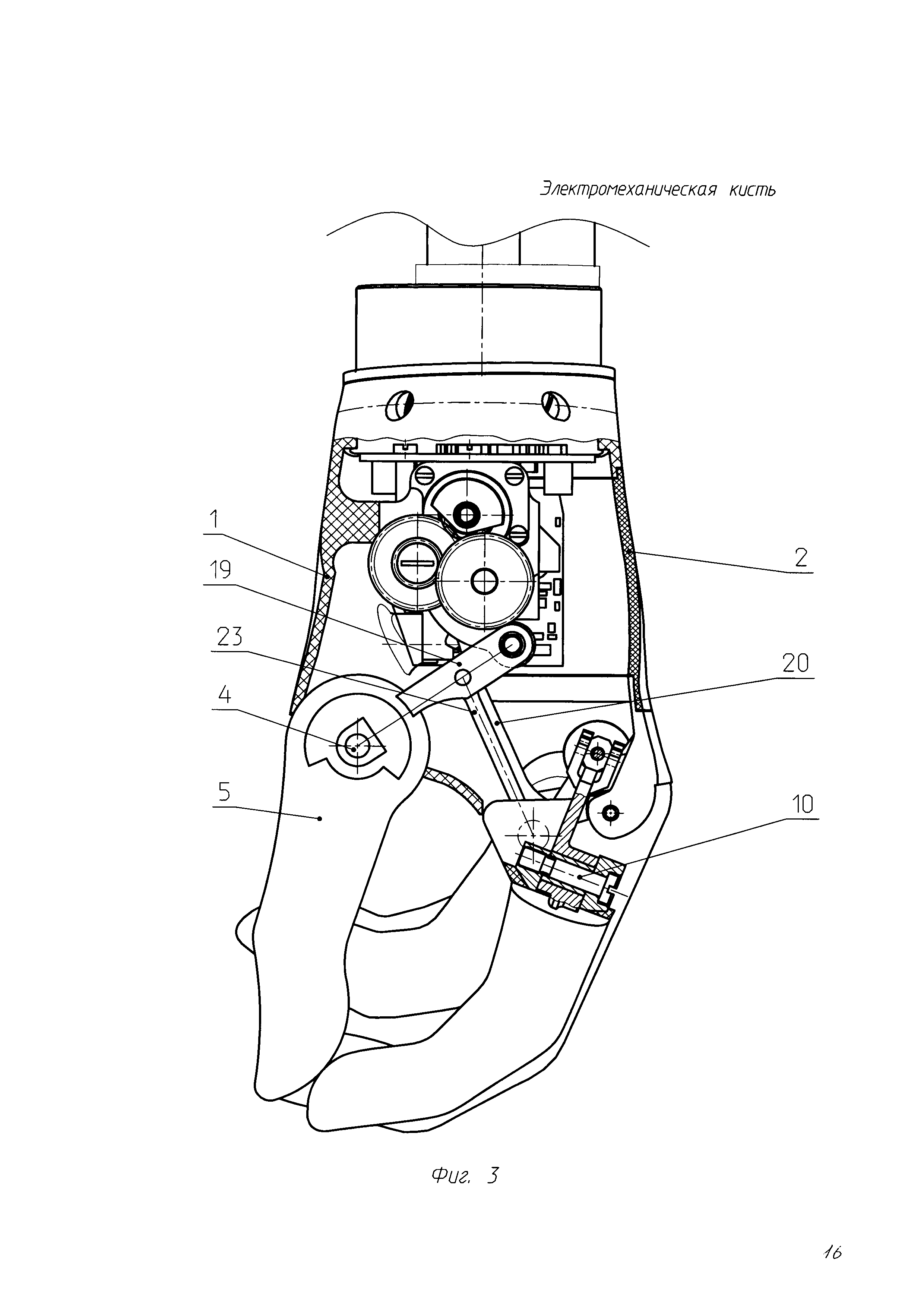
На фиг. 3 изображена электромеханическая кисть без приемной гильзы, вид сбоку.
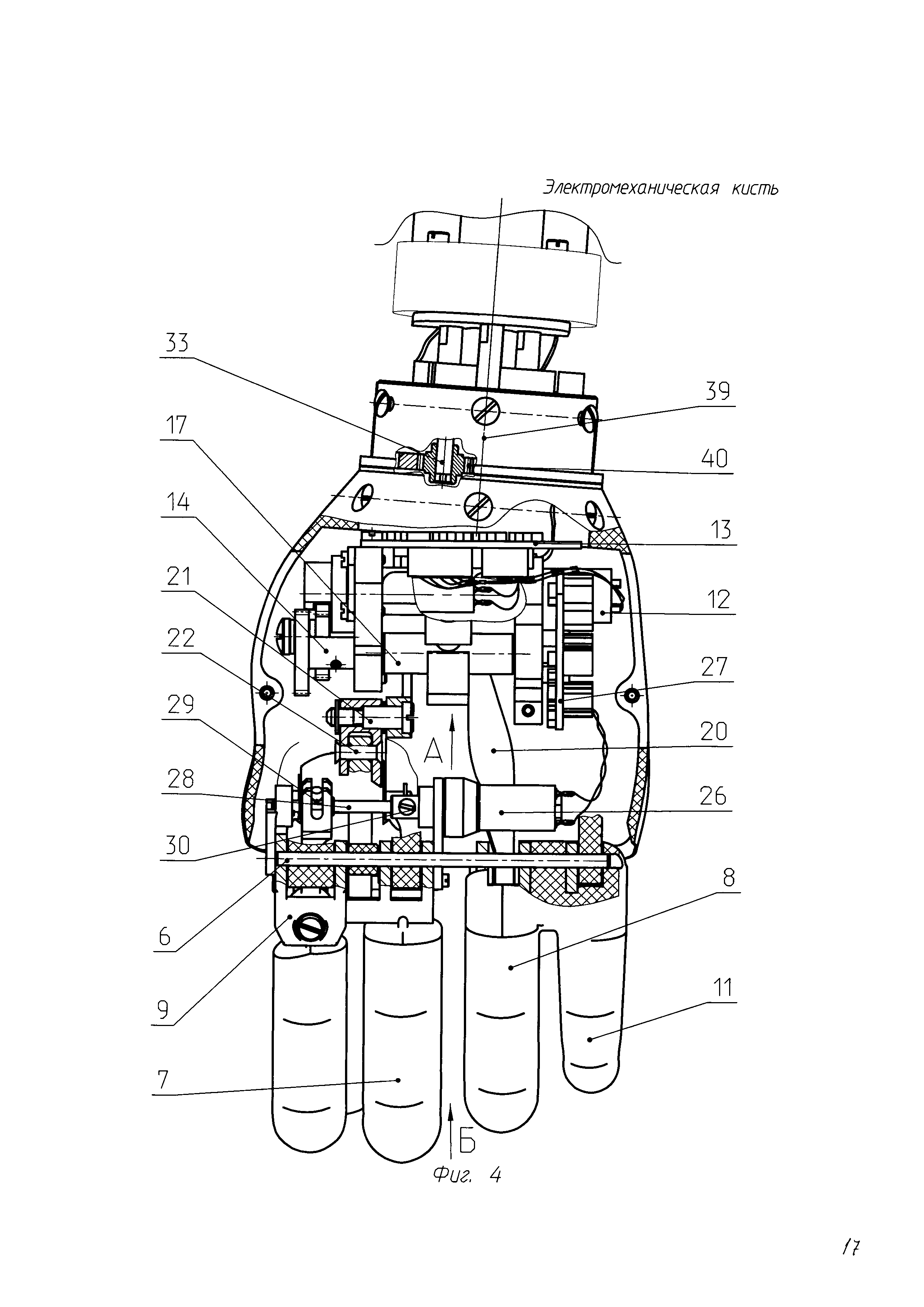
На фиг. 4 изображена электромеханическая кисть без приемной гильзы, вид сверху.
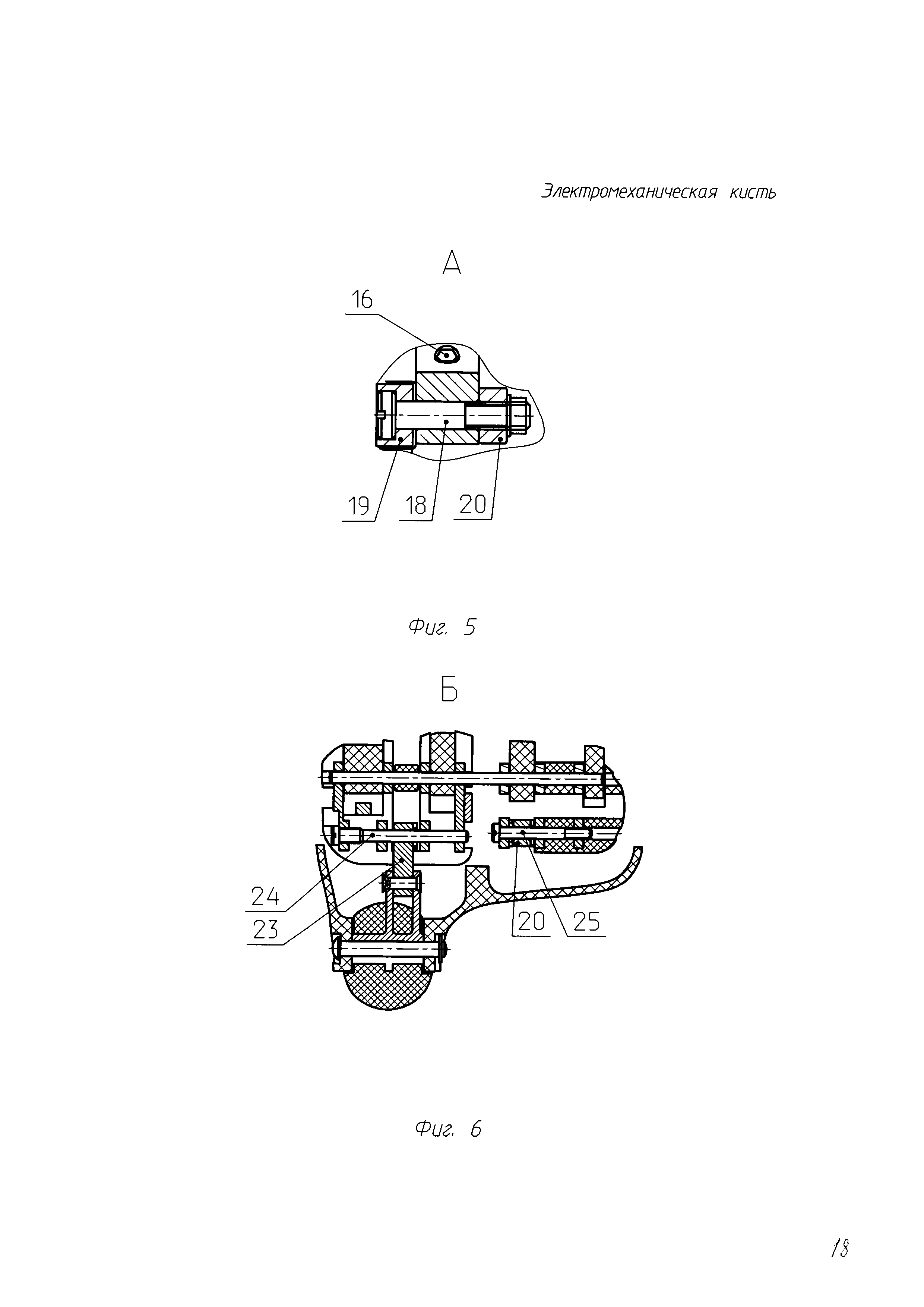
На фиг. 5 изображено крепление рычагов первого и четвертого пальцев.
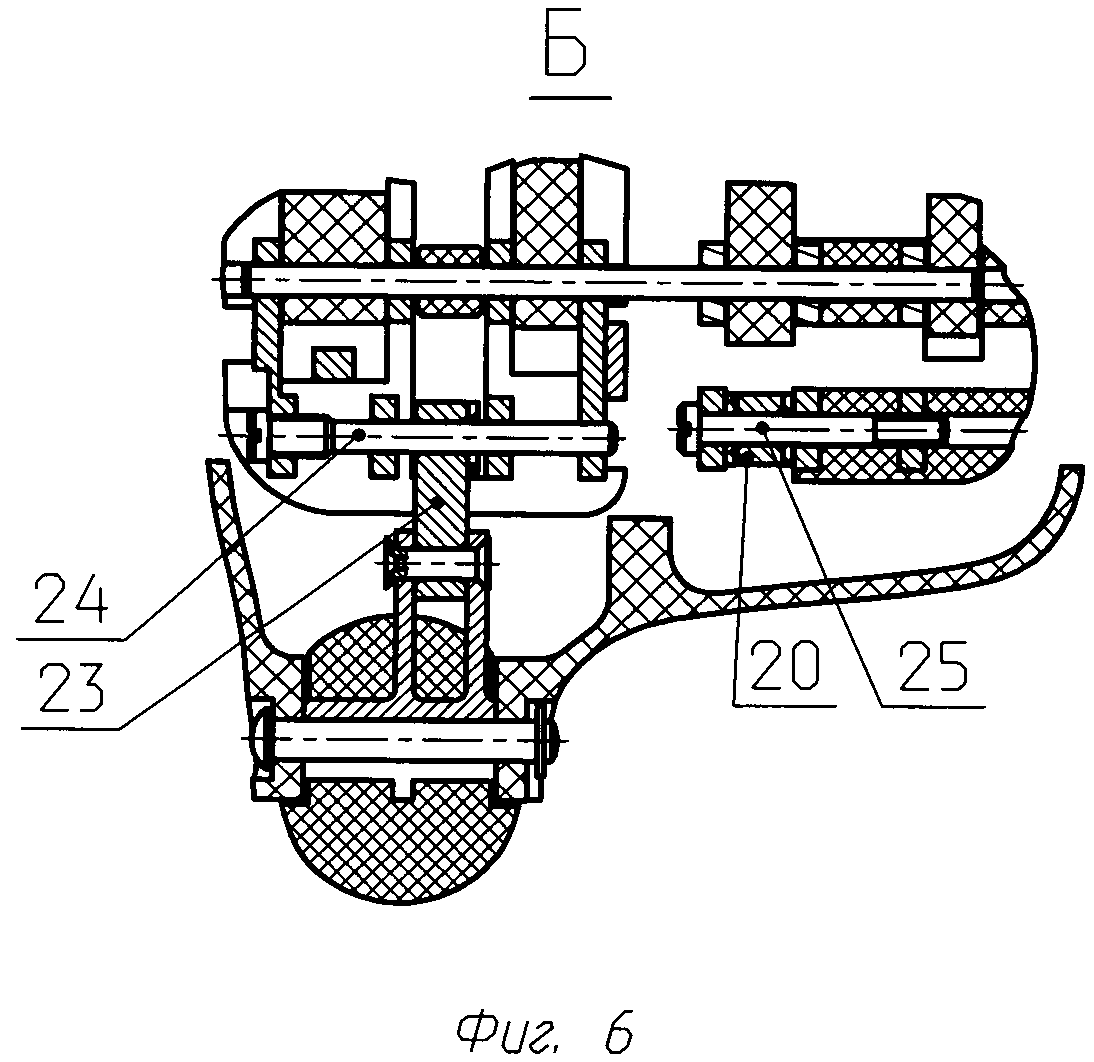
На фиг. 6 изображено крепление рычага четвертого пальца к каркасу четвертого пальца.
При этом введены нижеследующие обозначения:
1 - корпус;
2 - крышка;
3 - приемная гильза;
4 - первая ось вращения;
5 - каркас первого пальца;
6 - вторая ось вращения;
7 - каркас третьего пальца;
8 - каркас четвертого пальца;
9 - каркас второго пальца;
10 - третья ось вращения;
11 - пятый палец;
12 - первый микроэлектропривод;
13 - микроконтроллер механизма схвата;
14 - двухступенчатая цилиндрическая зубчатая передача (зубчатая передача);
15 - корпус механизма схвата;
16 - винт;
17 - кривошип;
18 - винт;
19 - рычаг;
20 - рычаг четвертого пальца;
21 - винт;
22 - ось вращения;
23 - рычаг первого пальца;
24 - винт;
25 - винт;
26 - второй микроэлектропривод;
27 - микроконтроллер механизма отведения;
28 - винтовая передача;
29 - гайка;
30 - винт;
31 - третий микроэлектропривод;
32 - микроконтроллер механизма ротации;
33 - двухступенчатая цилиндрическая зубчатая передача (зубчатая передача);
34 - корпус механизма ротации;
35 - система управления кисти;
36 - блок автономного питания;
37 - устройство управления блоком автономного питания;
38 - электроды для съема сигнала мышечной активности;
39 - продольная ось;
40 - зубчатое колесо.
Электромеханическая кисть (фиг. 1) содержит корпус 1 с установленной на внешней (тыльной) стороне крышкой 2, приемную гильзу 3, закрепленную на корпусе механизма ротации 34. В корпусе 1 посредством первой оси вращения 4 крепится каркас первого пальца 5, посредством второй оси вращения 6 (фиг. 2, 4) в корпусе 1 крепится каркас третьего пальца 7 и каркас четвертого пальца 8. При этом каркас второго пальца 9 закреплен в каркасе третьего пальца 7 с помощью третьей оси вращения 10, а каркас четвертого пальца 8 и пятый палец 11, выполненный в виде упругого звена, выполнены в виде единого блока, в котором облицовка каркаса четвертого пальца 8 выполнена за одно целое с облицовкой пятого пальца 11. При этом первая ось вращения 4 и вторая ось вращения 6 крепятся неподвижно в корпусе 1 напротив основания каркаса первого пальца 5 и в дистальной части корпуса 1 соответственно.
Механизм схвата состоит из первого микроэлектропривода 12 (фиг. 4) (например, электродвигатель 0,3 Nm 1226А с редуктором 12/4 ratio 256:1), электрически связанного с микроконтроллером механизма схвата 13 (например, SC1801S) и исполнительного органа механизма схвата первого 5, второго 9 и третьего 7 каркасов пальцев, выполненного в виде зубчатой передачи 14. При этом первый микроэлектропривод 12 и микроконтроллер механизма схвата 13 жестко закреплены в корпусе механизма схвата 15, который жестко крепится в корпусе 1. Зубчатая передача 14 жестко закреплена на валу первого микроэлектропривода 12 и расположена в корпусе механизма схвата 15. На ведомом валу (на фигуре не показан) зубчатой передачи 14 посредством винта 16 закреплен кривошип 17, к которому винтом 18 (фиг. 5) крепится один конец рычага 19 и один конец рычага 20. Второй конец рычага 19 крепится винтом 21 к каркасу первого пальца 5. В каркасе первого пальца 5 посредством оси вращения 22 крепится рычаг первого пальца 23 (фиг. 3, 6), второй конец рычага первого пальца 23 посредством винта 24 крепится к каркасу третьего пальца 7. Второй конец рычага четвертого пальца 20 крепится винтом 25 к каркасу четвертого пальца 8.
Механизм отведения снабжен вторым микроэлектроприводом 26 (фиг. 2, 4) (например, электродвигатель 0,1 Nm 1016А с редуктором 10/1К ratio 16:1), жестко закрепленным на каркасе третьего пальца 7 и снабженным микроконтроллером механизма отведения 27 (фиг. 2, 4) (например, SC1801S) и исполнительным органом механизма отведения второго 9 от третьего 7 каркаса пальцев. При этом микроконтроллер механизма отведения 27 жестко закреплен на корпусе механизма схвата 15 и электрически связан со вторым микроэлектроприводом 26. Исполнительный орган механизма отведения выполнен в виде винтовой передачи 28 с установленной на ней гайкой 29. Винтовая передача 28 крепится на валу второго микроэлектропривода 26 винтом 30 и является его продолжением.
Механизм ротации выполнен в виде третьего микроэлектропривода 31 (фиг. 1) (например, электродвигатель 0,3 Nm 1226А с редуктором 12/4 ratio 256:1), электрически связанного с микроконтроллером механизма ротации 32 (например, SC1801S) и исполнительного органа механизма ротации кисти, выполненного в виде зубчатой передачи 33 и связанного с ней механически зубчатого колеса 40. При этом зубчатая передача 33 жестко закреплена на валу (на фигуре не показан) третьего микроэлектропривода 31. При этом третий микроэлектропривод 31, микроконтроллер механизма ротации 32 и зубчатое колесо 40 жестко закреплены внутри корпуса механизма ротации 34 жестко прикрепленного к корпусу 1 в проксимальной его части.
При этом все три микроэлектропривода электрически связаны с системой управления кисти 35 (например, система управления Dynamic Mode Control Plus® (DMC Plus®)).
Система управления кисти 35 жестко закреплена на блоке автономного питания 36 и электрически связана с ним. Блок автономного питания 36 неподвижно закреплен на корпусе механизма ротации 34. К блоку автономного питания 36 жестко крепится устройство управления блоком автономного питания 37 (например, устройство управления 9Е385), которое электрически связано с ним. На приемной гильзе 3 установлены электроды для съема сигнала мышечной активности 38 (например, две группы по четыре электрода - ЭПСМ-02), производящие съем сигнала мышечной активности и передающие его на систему управления кистью 35, электрически связанную с микроконтроллером механизма схвата 13, микроконтроллером механизма отведения 27 и микроконтроллером механизма ротации 32. Управление происходит в динамическом режиме. Система управления кистью 35 позволяет пациенту управлять скоростью и усилием захвата пропорционально силе его мышечного сигнала, снимаемого с электродов для съема сигнала мышечной активности 38, и самому регулировать величину раскрытия кисти, разведение (сведение) пальцев и угол поворота кисти вокруг продольной оси 39, а также последовательность работы механизма кисти.
Все конструктивные элементы соединены между собой крепежными элементами - винтами.
Каркасы первого 5, второго 9, третьего 7, четвертого 8 пальцев представляют собой т-образный профиль в поперечном сечении.
Каркасы первого 5, второго 9, третьего 7, четвертого 8 пальцев и пятый палец 11 выполнены с облицовкой, например, из микроячеистого пенополиуритана.
Устройство работает следующим образом.
С помощью устройства управления блоком автономного питания 37 включается блок автономного питания 36. Электроды для съема сигнала мышечной активности 38 производят съем сигнала мышечной активности и передают его на систему управления кисти 35, которая преобразовывает снятые сигналы в командные.
При формировании управляющей команды на открытие кисти, поступающей с электродов съема сигнала мышечной активности 38 и преобразованной системой управления кистью 35, подается команда на микроконтроллер механизма схвата 13, включается первый микроэлектропривод 12, который приводит в движение зубчатую передачу 14 с жестко закрепленным на ней кривошипом 17. Кривошип 17 начинает вращаться против часовой стрелки, приводя в движение рычаг 19 и рычаг четвертого пальца 20. Рычаг 19 посредством винта 21 передает движение на каркас первого пальца 5. Соответственно рычаг первого пальца 23, закрепленный одним концом в каркасе первого пальца 5, вторым концом приводит в движение каркас третьего пальца 7, а рычаг четвертого пальца 20 вторым концом приводит в движение каркас четвертого пальца 8, кисть открывается.
При формировании управляющей команды на закрытие кисти, поступающей с электродов съема сигнала мышечной активности 38 и преобразованной системой управления кисти 35, подается команда на микроконтроллер механизма схвата 13. Механизм закрытия кисти осуществляется в обратной последовательности. Кисть закрывается и осуществляется схват в «щепоть» или захват и удержание предмета.
При формировании управляющей команды на отведение каркаса второго пальца 9 от каркаса третьего пальца 7, поступающей с электродов съема сигнала мышечной активности 38 и преобразованной системой управления кисти 35, подается команда на микроконтроллер механизма отведения 27, включается второй микроэлектропривод 26, начинает вращаться винтовая передача 28, по которой перемещается гайка 29, перемещающая каркас второго пальца 9. Гайка 29 совершает возвратно-поступательное движение. При приближении гайки 29 к микроэлектроприводу 26, каркас второго пальца 9 отводится от каркаса третьего пальца 7. При перемещении гайки 29 от микроэлектропривода 26, каркас второго пальца 9 наоборот прижимается к каркасу третьего пальца 7, что обеспечивает зажатие какого-либо предмета между облицованными каркасами второго и третьего пальца.
При формировании управляющей команды на вращение кисти вокруг продольной оси 39, поступающей с электродов съема сигнала мышечной активности 38 и преобразованной системой управления кисти 35, подается команда на микроконтроллер механизма ротации 32, включается третий микроэлектропривод 31, установленный в корпусе механизма ротации 34 и вращает зубчатую передачу 33, которая передает вращательное движение на зубчатое колесо 40, которое в свою очередь приводит во вращение корпус механизма ротации 34. В зависимости от сформированной пациентом команды, кисть может вращаться по часовой или против часовой стрелки вокруг продольной оси 39.
Щелевая антенна
Способ испытаний изделий на суммарную негерметичность
Способ определения временной привязки производимых с космического аппарата снимков земной поверхности
Способ оценки состояния солнечной батареи космического аппарата с инерционными исполнительными органами
Способ контроля производительности солнечной батареи космического аппарата на бестеневых орбитах
Герметизированное устройство
Устройство осевой фиксации коаксиальных деталей и способы осевой фиксации и расфиксации коаксиальных деталей
Герметизированное устройство
Способ зондирования верхней атмосферы
Коаксиальный электрохимический компрессор водорода
Механизм коленного шарнира
Электромеханическая кисть

