Результат интеллектуальной деятельности: СХЕМА МАГНИТНОЙ КОМПЕНСАЦИИ И СПОСОБ КОМПЕНСАЦИИ ВЫХОДНОГО СИГНАЛА МАГНИТНОГО ДАТЧИКА, РЕАГИРУЮЩЕГО НА ИЗМЕНЕНИЯ ПЕРВОГО МАГНИТНОГО ПОЛЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[001] В общем, настоящее изобретение относится к измерению магнитных полей, а в частности, к способам и устройствам для точного обнаружения присутствия слабого рассеянного магнитного поля при наличии известного более сильного поля. В частности, варианты осуществления настоящего изобретения относятся к способам усовершенствованных геофизических электромагнитных исследований.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
[002] Исключение действия известного, но нежелательного магнитного поля на датчик обычно известно как компенсация и иногда называется противодействием. Можно считать, что компенсация имеет две различные формы. В первой форме, иногда называемой активным противодействием, первое магнитное поле подавляют на протяжении объема пространства путем создания второго магнитного поля, которое находится в противофазе к первому. Во второй форме компенсации, иногда называемой пассивным противодействием, действие магнитного поля, обнаруживаемое датчиком, подавляют добавлением напряжения к выходному сигналу датчика, которое находится в противофазе к выходному сигналу датчика.
[003] Имеются несколько причин желать удаления сигнала сильного магнитного поля из сигнала магнитного датчика. В частности, при удалении значительной части сигнала понижается минимальный уровень сигнала, измеряемого датчиком, расширяется эффективный динамический диапазон датчика, что позволяет получать большее усиление и более высокую разрешающую способность по полю, чем это возможно в других случаях. Дополнительные причины могут включать в себя повышенную линейность и ослабленные помехи, связанные со скоростью нарастания. Кроме того, если компенсация приводит к ослабленному магнитному полю вблизи датчика, может наблюдаться соответствующее снижение помех, вызванных индукцией вихревого тока и наведенной намагниченностью в находящихся поблизости металлических компонентах.
[004] Для задач этого изобретения магнитный (М) датчик может быть магнитометром, например SQUID (сверхпроводящим квантовым интерференционным магнитометром), катушкой обратной связи, феррозондовым магнитометром, датчиком на атомных парах или аналогичным устройством, которое обладает непосредственной чувствительностью к магнитному полю, или катушкой, петлей или аналогичным электрическим схемным элементом, который в соответствии с законом Фарадея обладает чувствительностью к изменениям во времени плотности магнитного потока, или любым прибором с аналогичными функциональными возможностями.
[005] Способы компенсации находят различные применения, одним из которых является подавление излучаемой электромагнитной энергии. Например, в документе GB2438057 A (Robertson) описано подавление электромагнитного излучения с помощью магнитного датчика. В другом примере Paschen и соавторы в US5,920,130 A раскрыли подавление помех в линии передачи. В третьем примере Holmes и Scarzello в US6,798,632 B1 описали использование набора из трех ортогональных катушек Гельмгольца для окружения электрического устройства, также для подавления испускаемого излучения промышленной частоты.
[006] Кроме того, способы компенсации можно использовать для регулирования помех от магнитного поля в объеме, что является обычным для помещений, содержащих устройства магнитно-резонансной томографии или электроннолучевые приборы. В таких случаях токи пропускают через катушки Гельмгольца, окружающие объем, подлежащий экранированию. Обычно компенсацию получают путем размещения магнитного датчика в экранируемом объеме, затем использования сигнала датчика для генерации тока в катушках и таким образом, аннулирования поля на датчике. В документе US5,465,012 A (Dunnam) описано использование этого способа, в котором три набора из ортогональных катушек Гельмгольца применяют для компенсации однородного магнитного поля внутри катушек, как это делают Kropp и соавторы, которые в документе US2011/0144953 рассматривают случай компенсации градиентных полей. Buschbeck и соавторы в документе US2005/0195551 отмечают, что в некоторых применениях, связанных с пучками частиц, трудно располагать датчик в объеме, в котором поле должно быть аннулировано, и поэтому два датчика, расположенные в двух точках, используют для интерполяции значения поля, подлежащего аннулированию. Gelbien в документе US5,952,734 раскрывает устройство для поддержания постоянного магнитного потока в области путем использования катушки, возбуждаемой сервоконтуром и управляемой схемой синхронизации потока, и магнитного датчика. Buchannan в документе US2004/0006267 предложил способ компенсации, в котором используются катушки и пространство с магнитным экранированием. Wallauer в документе ЕР2259081 А1 предложил способ компенсации магнитного поля с использованием магниторезистивного датчика, воспринимающего поле в катушках Гельмгольца. В изобретении Wallauer приходящий сигнал магнитного поля разделяют на дополняющие высокочастотную и низкочастотную составляющие, при этом низкочастотную составляющую пропускают через аналого-цифровой преобразователь (АЦП, ADC), цифровой фильтр, далее через цифро-аналоговый преобразователь (ЦАП, DAC) до объединения с высокочастотной составляющей и пропускают к катушкам Гельмгольца.
[007] Farjadad в документе US2011/0292977 раскрыл схему компенсации на основе локальной сети, предназначенную для применений при каротаже скважины, в которой синфазный сигнал вводится в контроллер для образования компенсирующего сигнала, предназначенного для приложения к разностному сигналу. Задача изобретения заключается в предварительной компенсации разностного сигнала для уменьшения действия или наложения помех или несогласованности в каналах связи.
[008] В области геофизических измерений, при которых структуру удельной электропроводности геологической среды получают на основании измерений электромагнитного (ЭМ) поля, способы компенсации являются обычными. Широко распространенный пример такой компенсации встречается в активных электромагнитных разведочных системах с источником. В активной электромагнитной системе передатчик возбуждает петлю или катушку периодическим (устойчиво повторяющимся) изменяющимся во времени током. Этот ток создает электромагнитное поле, обычно называемое первичным полем, которое возбуждает электрический ток в геологической среде.
[009] Эти токи в геологической среде создают рассеянное электромагнитное поле, которое обнаруживается приемником, приданным электромагнитной системе. Во многих электромагнитных системах передатчик и приемник геометрически выполнены таким образом, что первичное поле на порядки величины сильнее, чем рассеянное поле. В таких случаях предпочтительно использовать способы компенсации для удаления по мере возможности первичного поля от датчиков, что позволяет обнаруживать более слабые рассеянные поля.
[0010] Во многих активных системах с источником компенсация реализуется достижением баланса между первичным полем и вторичным полем, создаваемым противодействующей катушкой. Таким образом, результирующее поле от двух полей может быть приблизительно компенсировано на датчике.
[0011] Точное уравновешивание противодействия первичному полю наилучшим образом достигается в случае, когда геометрии катушек являются фиксированными, а также являются фиксированными взаимные индуктивности передатчика и противодействующих катушек и связь их с объемом, в котором поля должны аннулироваться. При фиксированной геометрии катушек точная компенсация в одной точке может быть достигнута расположением противодействующих катушек в цепи последовательно с катушками передатчика и регулированием моментов соответствующих катушек таким образом, чтобы магнитные поля были точно противофазными. Этот способ работает наилучшим образом в случаях, когда поля не возмущены значительно другими источниками рассеяния и когда геометрия катушек является устойчивой. Он особенно эффективен, когда передатчик и противодействующие катушки расположены последовательно и таким образом, что имеются одинаковые токовые волновые сигналы по меньшей мере на частотах значительно ниже частот, на которых емкость катушек значительно влияет на импеданс нагрузки.
[0012] Davydychev и соавторы в документе US2010/0026280 представили пример компенсации, в котором раскрыли устройство для регулирования взаимной индуктивности передатчика и катушки приемника с использованием противодействующей катушки и подстроечной катушки. Подстроечная катушка включена для получения возможности регулирования поля противодействующей катушки, чтобы повышать качество достигаемого аннулирования. Другой пример обнаружен в области наземных геофизических измерений, для которых Bosnar в документе US2009/0295391 A1 раскрыл прибор для одновременного измерения статического магнитного поля и изменяющегося во времени электромагнитного (ЭМ) отклика геологической среды. Bosnar использует устойчивую геометрию, в соответствии с которой компенсирующая катушка Гельмгольца применяется для аннулирования изменяющегося во времени первичного электромагнитного поля в магнитометре, используемом для обнаружения статического магнитного поля земли.
[0013] По причинам, упомянутым выше, компенсация часто требуется при воздушных электромагнитных (ВЭМ) измерениях, при которых используется излучающая петля управляемого источника. Пример воздушной электромагнитной системы с использованием компенсации предложен в документе US2010/0052685 (Kuzmin and Morrison), в котором раскрыто адаптивное воздушное электромагнитное устройство, выпускаемое промышленностью как система VTEM AEM. В системе VTEM концентрический передатчик и противодействующие катушки центрированы на приемнике. Противодействие также применяется в воздушной электромагнитной системе AeroTEM, в которой используется неизменяемая геометрия, при этом компенсация в последней воздушной электромагнитной системе склонна быть более эффективной, чем в первой из вышеупомянутых, поскольку используется неизменяемая геометрия катушек. Таким образом, более стабильное противодействие в системе AeroTEM по сравнению с VTEM получают за счет добавочной массы, допущения больших затрат на исследования и крупной конструкции, для которой требуются большие затраты на перевозку и на ремонт при повреждении. Средство для точной компенсации системы с гибкой геометрией предполагается более предпочтительным.
[0014] Противодействие первичному полю, только что рассмотренное, позволяет приемнику электромагнитного поля работать с более высоким коэффициентом усиления, чем возможный в случае отсутствия компенсации, и соответственно позволяет измерять поля, рассеиваемые от земли, при большей чувствительности. Тем не менее, в системах компенсации из современного уровня техники, используемых для реализации воздушных электромагнитных способов, компенсируется только первичное поле передатчика. Но имеются другие сильные источники вариации магнитного поля в виде помех различных форм, которые также ухудшают качество измерения и ограничивают коэффициент усиления приемника. Они включают в себя эффект поворота магнитного датчика в статическом магнитном поле земли, энергию, излучаемую от линий электроснабжения и культурных источников, и атмосферные помехи. В случаях, когда электромагнитную систему, такую как воздушная электромагнитная система GeoTEM, устанавливают на металлическом летательном аппарате или когда электромагнитные измерения выполняют вблизи крупного проводника, такого как море, или в шахте при наличии проводящих и/или проницаемых руд и инфраструктуры, компенсация, которая может динамически реагировать на изменение проводящей среды, должна быть предпочтительной.
[0015] Дополнительный эффект, который встречается в некоторых воздушных электромагнитных системах, работающих во временной области, возникает потому, что для токового волнового сигнала передатчика может иметься конечное время распространения через излучающую петлю, эффект, который может быть заметным на приемнике, когда петля быстро возбуждается током. В таких случаях ток в компенсирующей катушке, установленной последовательно с излучающей катушкой, может не быть в фазе с током (токами) в излучающей петле (петлях), так что может потребоваться коррекция.
[0016] Хотя противодействующие катушки предполагаются повышающими качество данных воздушной электромагнитной разведки, эти же самые катушки могут действовать как антенны и поэтому могут принимать и ретранслировать источники фоновых помех, создавая дополнительный источник помех в массиве данных воздушных электромагнитных измерений. Дополнительные помехи могут быть вызваны изменением связи катушек со статическим полем земли. Такие соображения не предполагаются условием точной противоположности противодействующего поля первичному полю на достаточно низких частотах, на которых емкости катушек не являются движущей силой. Однако на практике трудно достигать точного подавления и в результате может быть остаточный неподавленный сигнал, особенно в системах, которые не являются жесткими. Следовательно, предпочтительно иметь небольшую компактную систему противодействия, которая может реагировать на такие эффекты.
[0017] Кроме того, в воздушной электромагнитной системе, такой, какую предложил Polzer в документе WO2011/085462, в которой приемник находится на изолированной от движения платформе, приемник может перемещаться или поворачиваться относительно передатчика, так что стандартные способы противодействия, которыми аннулируется первичное поле в одной точке, могут быть неэффективными. В таких случаях предпочтительно отделять систему компенсации от излучающей петли и размещать ее вместе с приемником. В этом случае также предпочтительно формировать цифровой сигнал противодействия, основанный на данных, передаваемых к приемному модулю по беспроводной линии, а не с использованием аналоговой последовательной конфигурации. Такую конфигурацию трудно реализовать для этой системы, поскольку как непосредственное электрическое соединение, так и прямое соединение, будет препятствовать изоляции движения.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
[0018] Согласно настоящему изобретению предложена система компенсации магнитного поля, предназначенная для подавления действия сильного магнитного поля на магнитный датчик или выходной сигнал его с тем, чтобы иметь возможность обнаруживать с повышенной чувствительностью небольшие вариации поля, система, называемая в этой заявке компенсатором. В изобретении используется цифровая обработка сигналов для предсказания применяемой компенсации. Магнитный датчик обнаруживает магнитное поле с выдачей аналогового сигнала, который далее преобразуется в цифровую форму аналого-цифровым преобразователем (ADC). Этот сигнал считывается контроллером и привязывается ко времени. Далее контроллер передает эти сигналы к обрабатывающему данные компьютеру для обработки и сохранения. Обрабатывающий компьютер предсказывает будущий компенсирующий волновой сигнал на основании модели, которая включает в себя данные, принимаемые с контроллера. Компьютер передает предсказываемый волновой сигнал обратно к контроллеру. Контроллер формирует цифровой выходной компенсирующий сигнал (амплитуду как функцию времени), который передает к цифро-аналоговому преобразователю (DAC), где он преобразуется в аналоговую форму. Выходной аналоговый сигнал с цифро-аналогового преобразователя образует компенсирующий сигнал, который подавляет действие сильного магнитного поля непосредственно на магнитном датчике или на выходе его.
[0019] В некоторых вариантах осуществления входные сигналы от дополнительных датчиков могут использоваться для содействия предсказанию компенсирующего сигнала. В этих вариантах осуществления контроллер привязывает ко времени входящие данные датчика, передает их к обрабатывающему данные компьютеру для обработки и сохранения. Эти входные сигналы от дополнительных (или вспомогательных) датчиков используются обрабатывающим данные компьютером вместе с упомянутыми выше входными сигналами для образования предсказываемого волнового сигнала. В случаях, в которых должно компенсироваться первичное магнитное поле, создаваемое передатчиком электромагнитной разведочной системы, данные вспомогательных датчиков могут относиться к форме и амплитуде токового волнового сигнала передатчика и к геометрической конфигурации излучающей петли.
[0020] В одном варианте осуществления настоящего изобретения компенсирующий сигнал добавляется к аналоговому выходному сигналу датчика для подавления аналогового сигнала сильного нежелательного магнитного поля до преобразования его в цифровую форму, в результате чего повышается чувствительность цифро-аналогового преобразователя.
[0021] Во втором варианте осуществления компенсирующий ток возбуждает ток в катушке, который далее используется для подавления вариации нежелательного магнитного поля на датчике, вследствие чего обеспечивается возможность обнаружения более слабого поля.
[0022] В любом варианте осуществления сигнал, вводимый в контроллер, может содержать потоки данных, исходящие от вспомогательных датчиков, на основании которых может предсказываться компенсация более сильного магнитного поля. Датчики могут включать в себя устройство мониторинга волнового сигнала передатчика, устройства мониторинга геометрии и смещения катушки и датчиков, камеру, магнитометр, индукционную катушку, датчик угловой скорости, акселерометр, инклинометр, прибор глобальной системы местоопределения или другие геолокационные инструментальные средства. На основании данных этих датчиков, а также потока данных самого компенсированного магнитного датчика можно формировать входные данные, после чего прогнозное моделирование или фильтрацию можно использовать для вычисления и следовательно, подавления действия сильного магнитного поля. Компенсацию можно применять к первичному полю передатчика электромагнитного поля, но также можно применять к таким другим эффектам, как магнитные поля линий электроснабжения. Ключевая особенность настоящего изобретения заключается в том, что в нем можно использовать прогнозную модель программного обеспечения с входными сигналами от датчиков для адаптивной компенсации измерения магнитного поля, когда условия гарантируются.
[0023] Настоящее изобретение может быть развернуто как приемник электромагнитной разведочной системы путем установки его в подходящий корпус вместе с источником питания и при желании вместе со вспомогательными датчиками с тем, чтобы обеспечивать геолокацию, ориентацию и другие данные, которые могут потребоваться. Таким образом, когда передатчик отсутствует, настоящее изобретение можно использовать как пассивный приемник электромагнитного поля, в котором могут компенсироваться помехи от линии электроснабжения или эффект поворота. При наличии передатчика в настоящем изобретении можно также компенсировать первичное поле передатчика. Это можно делать при пассивном мониторинге токового волнового сигнала, выводимого передатчиком, или при мониторинге волнового сигнала передатчика во время активной передачи информации по управлению волновым сигналом к передатчику.
[0024] Изобретение имеет несколько аспектов, которыми представлены усовершенствования по сравнению с современным уровнем техники. При геофизических исследованиях изобретение можно применять в активных электромагнитных способах, в которых компенсация первичного поля часто является первостепенной задачей, и в пассивных электромагнитных способах, в которых компенсированные данные могут регистрироваться на подвижных платформах или при наличии помех от линий энергоснабжения.
[0025] Что касается применений для геофизических исследований, то настоящее изобретение обладает преимуществом, заключающемся в большой независимости от системного аппаратного обеспечения. Например, при сочетании соответствующих входных сигналов от датчиков с прогнозной моделью изобретение можно применять в воздушных электромагнитных (ВЭМ) системах, имеющих гибкую геометрию. Прогнозная модель может быть нейронной сетью, обучаемой или иным образом адаптируемой для по мере отдаления воздушной электромагнитной системы от эффекта рассеяния землей. Кроме того, способность к предсказанию можно использовать для обеспечения компенсации с учетом положений поверхностей управления летательного аппарата. Прогнозный элемент также является важным при компенсации периодического первичного волнового сигнала, поскольку компьютер, обрабатывающий скрытые состояния при применении компенсирующего сигнала, может быть согласован с задержками на один или несколько периодов первичного волнового сигнала. Прогнозная модель может включать в себя входные сигналы от инерциальных, динамических и кинематических датчиков для предсказания сигнала, обусловленного поворотом датчика в статическом магнитном поле земли.
[0026] Другое преимущество изобретения заключается в том, что, как предложили Polzer и соавторы в заявке WO2011/085462, компенсацию можно выполнять на платформе, которая механически не зависит от излучающей антенны, что позволяет осуществлять компенсацию на платформах, рассчитанных на изоляцию движения. При использовании цифровой линии для связи компенсированного датчика с контроллером датчик можно располагать на расстоянии от контроллера, периферийных устройств и от любых помех, который они могут создавать. При этом также минимизируются пространство и потребность в электроэнергии компенсированного датчика. Наконец, компенсацию можно выполнять при очень низких уровнях энергии, таких, которые могут обеспечиваться батарейными системами, что позволяет использовать платформы, на которых энергия в больших количествах отсутствует.
[0027] Дополнительный аспект изобретения заключается в том, что динамический диапазон измерительной системы расширяется за счет преимущества по своей природе более высокой точности цифро-аналоговых преобразователей по сравнению с аналого-цифровыми преобразователями при вычитании создаваемого аналогового волнового сигнала из прогнозной модели магнитного поля. В случае, когда компенсируемый сигнал является периодическим, компенсирующий сигнал можно предсказывать с управляемой задержкой, так что компенсирующий сигнал может быть подан обратно точно задержанным на один цикл или на несколько циклов. Компенсирующий сигнал, а также компенсированный сигнал регистрируются и привязываются ко времени вместе с данными периферийных датчиков, на основании которых моделировался компенсирующий сигнал. Затем на основании этих записей может быть вычислен некомпенсированный сигнал.
Краткое описание чертежей
На чертежах:
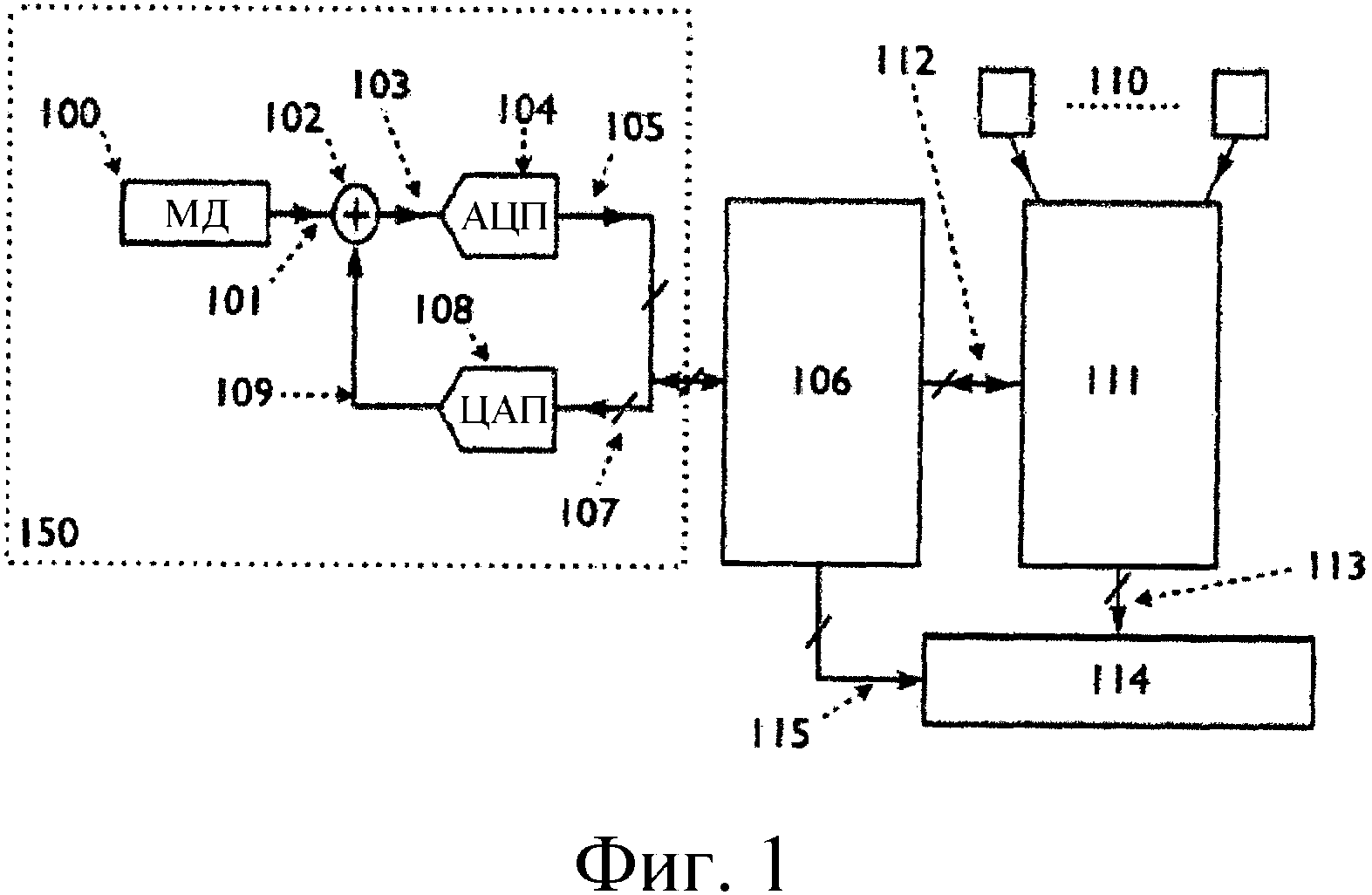
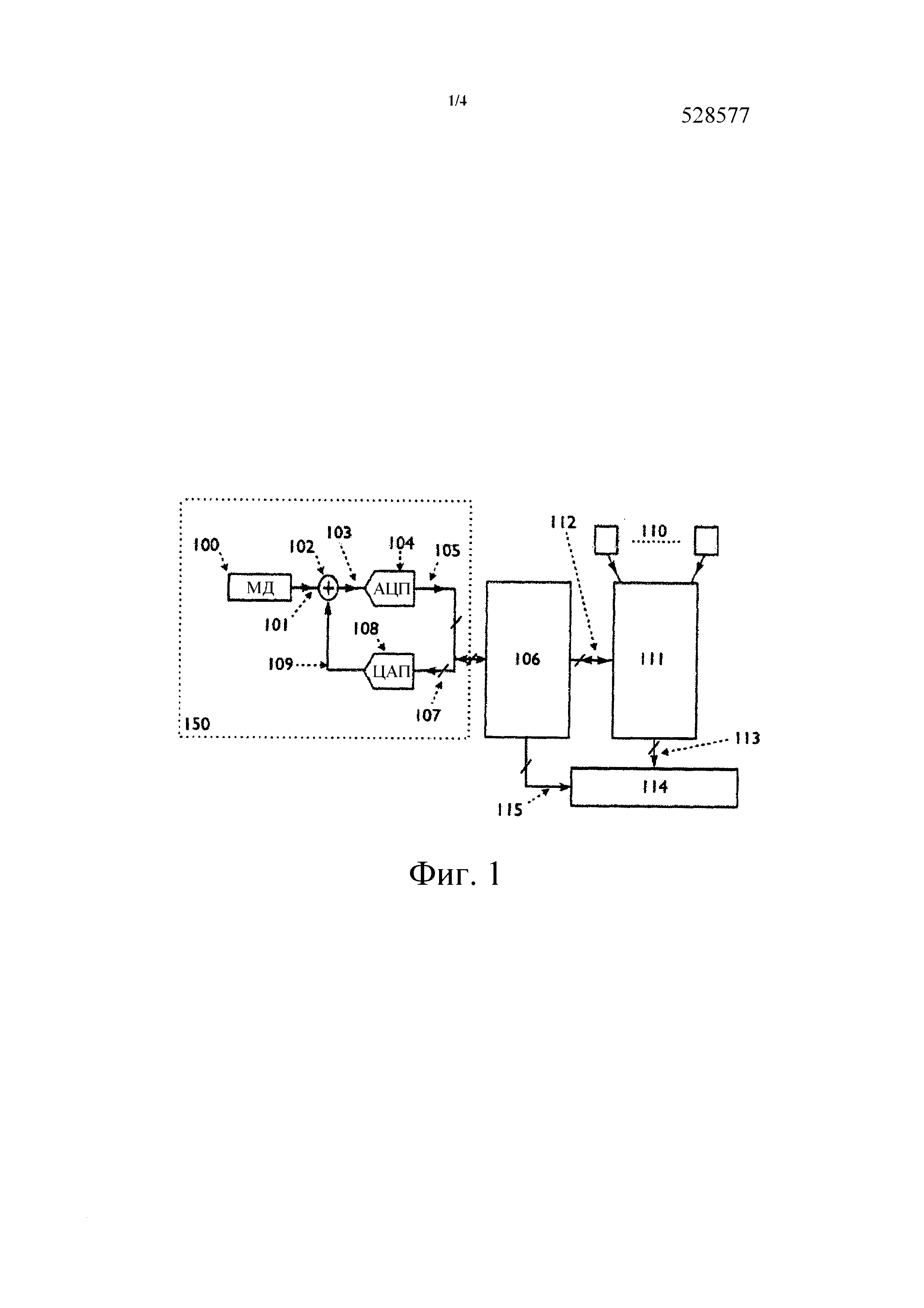
[0028] фигура 1 - один вариант осуществления изобретения, реализованный с одним магнитным датчиком; линиями с косой чертой обозначены проводники для цифровых данных; стрелками показаны направления распространения сигналов;
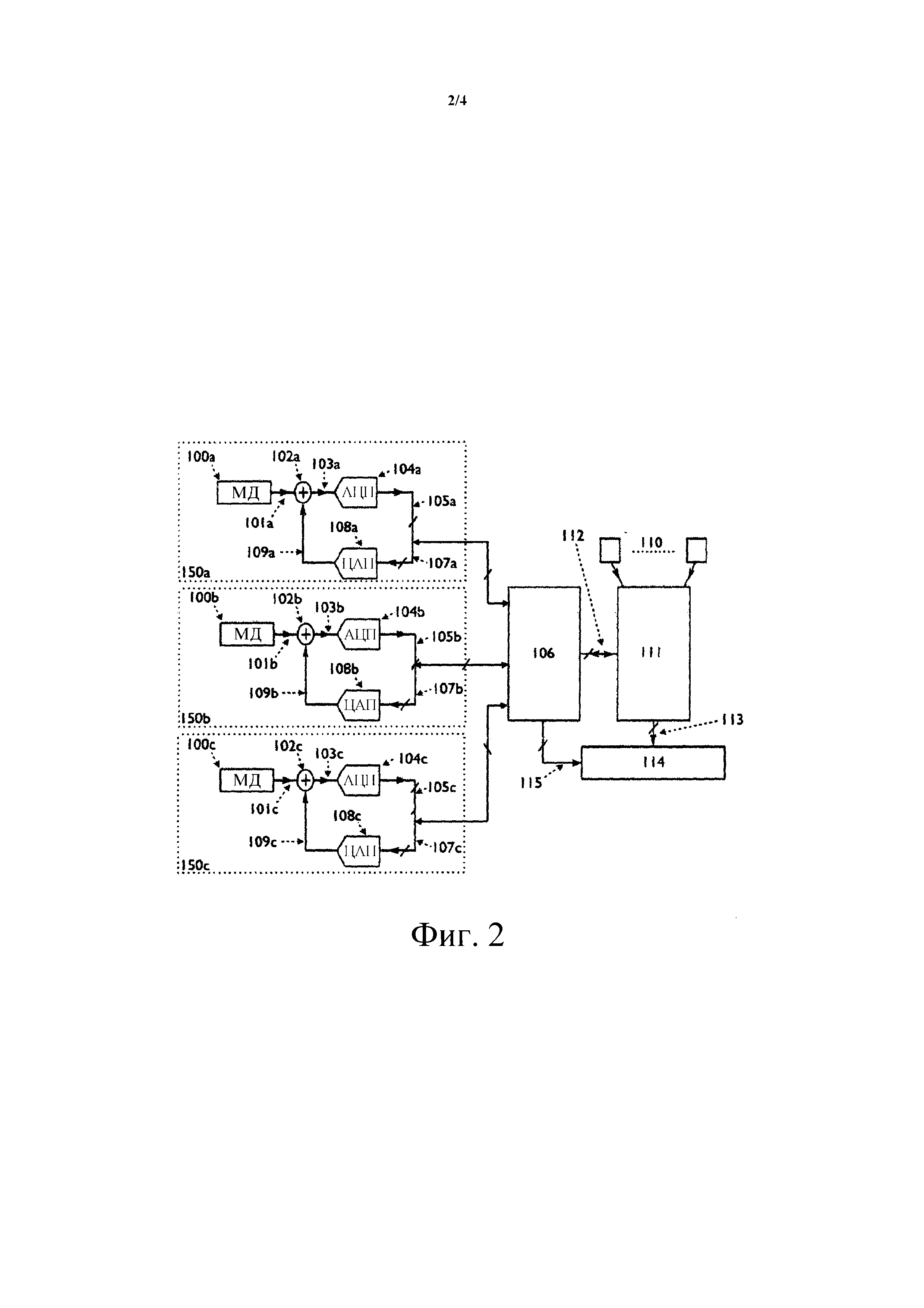
[0029] Фигура 2 - вариант осуществления изобретения, выполненный с возможностью приема данных с трех магнитных датчиков;
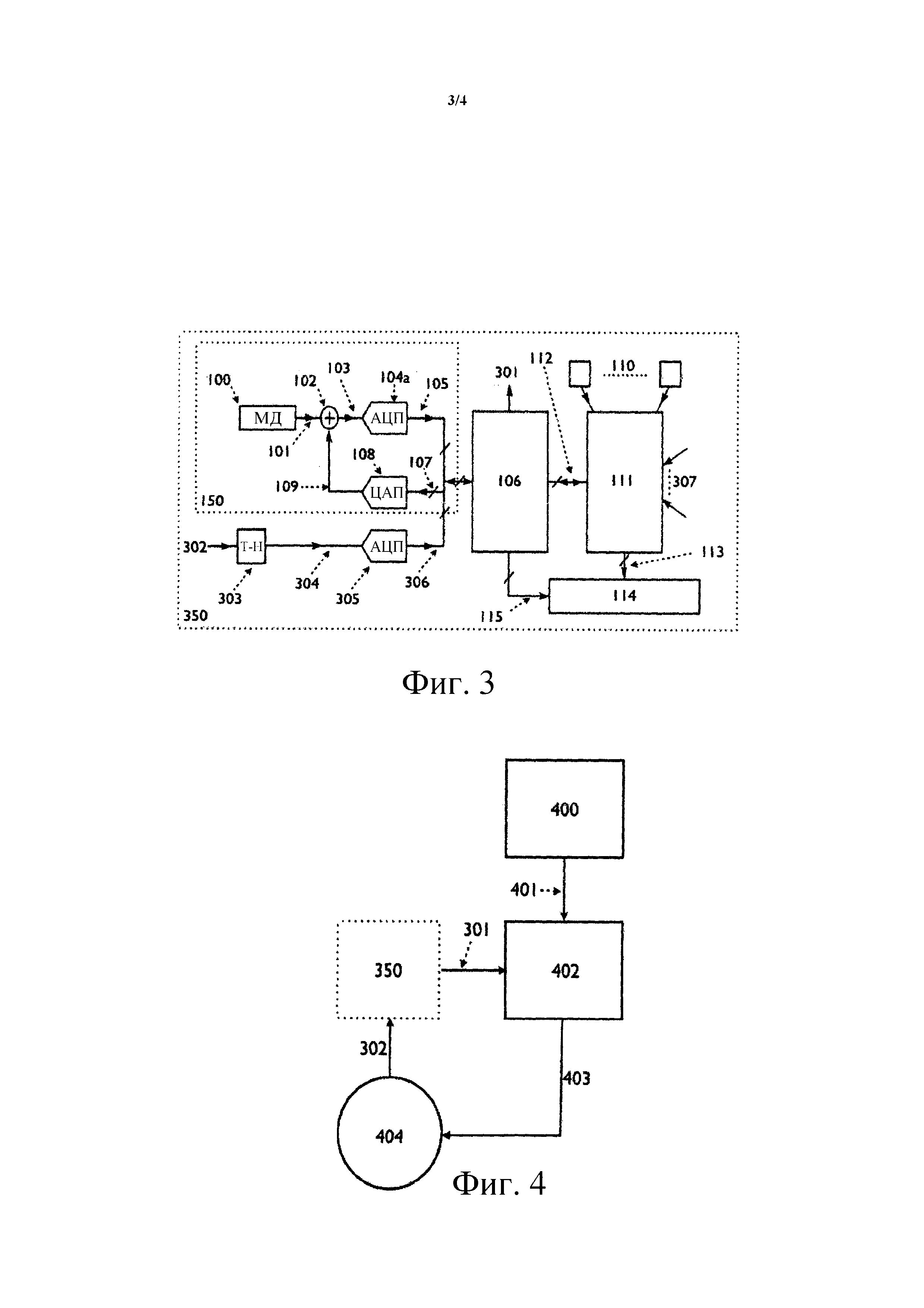
[0030] фигура 3 - иллюстрация изобретения, выполненного с возможностью компенсации первичного поля волнового сигнала управляемого источника электромагнитного поля;
[0031] фигура 4 - иллюстрация возможной реализации изобретения в электромагнитной системе;
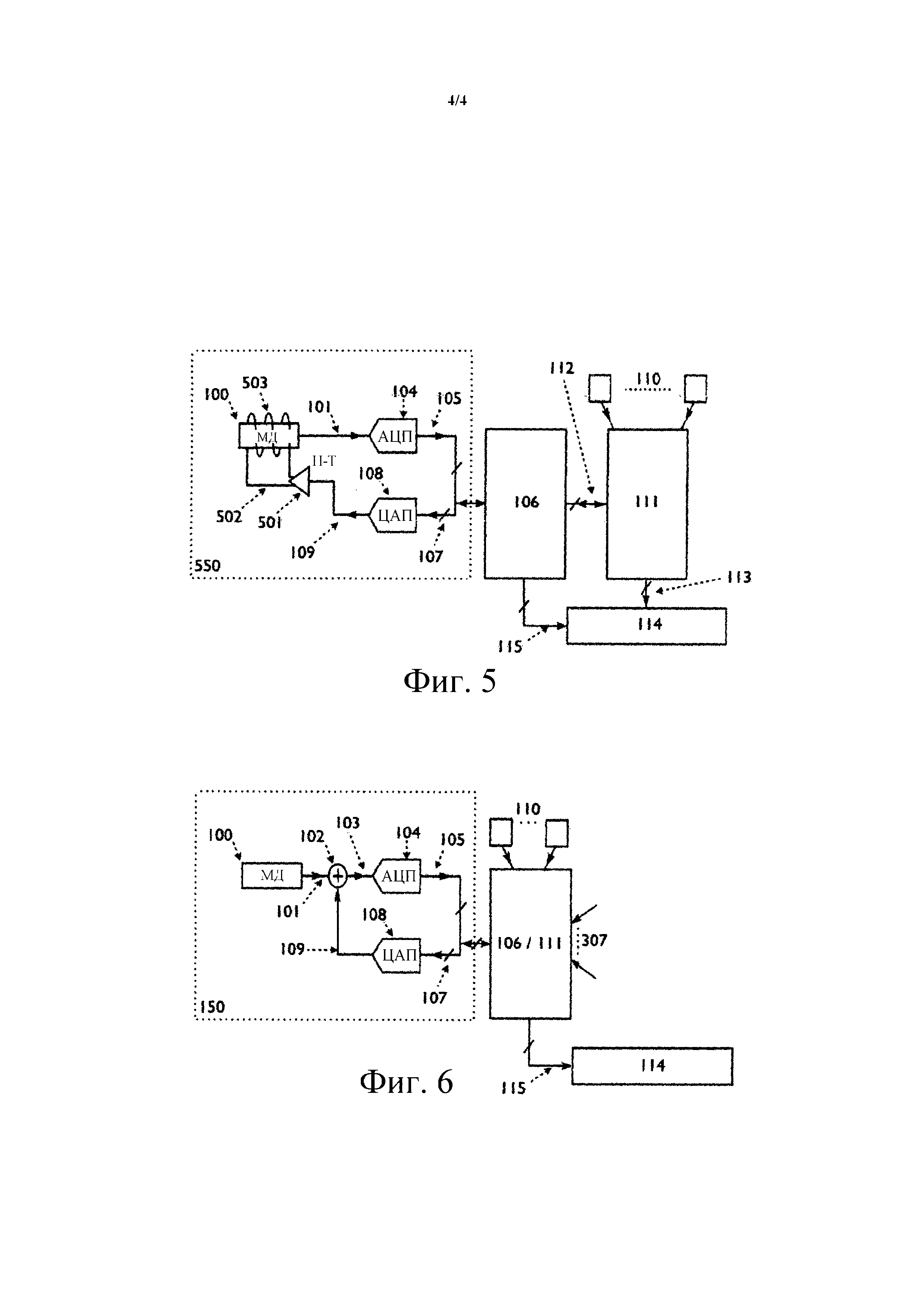
[0032] фигура 5 - другой вариант осуществления изобретения, показанного на фигуре 1; и
[0033] фигура 6 - еще один вариант осуществления изобретения, показанного на фигуре 1.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0034] В одном предпочтительном варианте осуществления настоящего изобретения, показанном на фигуре 1, компенсация осуществляется с помощью суммирования аналоговых сигналов. На фигуре 1 показан магнитный датчик (МД) 100, который создает сигнал, выводимый по аналоговой линии 101 к одному из входов сумматора 102. Сумматор 102 образует сигнал, который передается по аналоговой линии 103, после чего он преобразуется в цифровую форму аналого-цифровым преобразователем (ADC) 104. Цифровой сигнал выводится по цифровой линии 105 связи к контроллеру 106. В контроллере 106 входные цифровые сигналы из цифровых линий 105 и 112 связи используются для вычисления выходного цифрового компенсирующего сигнала и передачи его по цифровой линии 107 связи к цифро-аналоговому преобразователю (DAC) 108, где он преобразуется в аналоговую форму. Кроме того, цифровые сигналы из линий 105 и 107 связи, передаваемые по линии 115 связи, вместе с точным временем сохраняются в устройстве 114 хранения данных, что позволяет математически реконструировать некомпенсированное поле. Аналоговый сигнал с цифро-аналогового преобразователя 108 выводится по линии 109 к второму входу сумматора 102. Кроме того, цифровой сигнал, принимаемый по линии 105 связи, выводится контроллером 106 к компьютеру 111 по линии 112 связи.
[0035] Когда для формирования компенсирующего сигнала требуются дополнительные данные, со вспомогательных аналоговых или цифровых датчиков 110 данные передаются к компьютеру 111 для сохранения и использования при вычислении компенсирующего сигнала. Кроме того, компьютер 111 обновляет модель, предсказывающую магнитное поле на датчике 100, при использовании входных данных с контроллера 106 и датчиков 110.
[0036] Упомянутый компьютер 111 приспособлен для построения вычислительной (или цифровой) модели магнитного поля с использованием алгоритма, который по существу предсказывает ожидаемое значение магнитного поля на основании первого цифрового сигнала, априорного цифрового компенсирующего сигнала и любых необходимых данных вспомогательных датчиков, что позволяет компенсировать нижеследующие эффекты, обычно проявляющиеся при электромагнитных измерениях, включая, но без ограничения ими:
-сильное повторяющееся магнитное поле излучающей петли,
-конечную скорость света в излучающей петле,
-поворот магнитного датчика в магнитном поле земли,
-изменение взаимной индуктивности цепи передатчика и приемника,
-изменения гармонических помех, например, обусловленных линиями электроснабжения и электротехническим оборудованием,
-сильный отклик геологической среды в случае, когда систему электромагнитных исследований возбуждают на грунте или вблизи него,
-отклик морской воды,
-реакцию на фон электромагнитной системы, установленной на носителе, содержащем металлические компоненты, таком как летательный аппарат, при этом реакцию на фон измеряют по мере удаления системы от земли,
-отклик металлического оборудования или металлических деталей,
-статическое магнитное поле земли,
-или любые сочетания перечисленных выше факторов.
[0037] Результирующие цифровые данные передаются по цифровой линии 112 связи к контроллеру 106 и к устройству 114 хранения данных по линии 113 связи.
[0038] Магнитный датчик (МД) 100, сумматор 102, аналого-цифровой преобразователь 104 и цифро-аналоговый преобразователь 108 образуют сенсорный блок 150.
[0039] Цифровые линии 105, 107, 112, 113 и 115 связи могут содержать непосредственное электрическое соединение, оптическое соединение, инфракрасное соединение, беспроводное соединение или сочетания их.
[0040] В других вариантах осуществления настоящего изобретения дополнительные магнитные датчики 100 могут быть добавлены к контроллеру 106 при необходимости, а вариант осуществления настоящего изобретения может включать в себя два, три или большее количество магнитных датчиков 100, расположенных в соответствующих сенсорных блоках 150.
[0041] На фигуре 2 показан контроллер 106, выполненный с возможностью приема данных с трех магнитных датчиков (МД) 100а, 100b, 100c при использовании трех вариантов осуществления сенсорных блоков 150а, 150b и 150с. Сенсорные блоки 150а, 150b и 150с из фигуры 2 выполнены с возможностью сбора трехкомпонентных электромагнитных данных.
[0042] В современном уровне техники точность, получаемая от цифро-аналогового преобразователя (DAC), приблизительно на порядок величины выше точности, получаемой от аналого-цифрового преобразователя (ADC). Поэтому точность компенсирующего сигнала, создаваемого цифро-аналоговым преобразователем 108, значительно выше по сравнению с точностью сигнала, который может быть считан с аналого-цифрового преобразователя 104. Следовательно, аналоговые сигналы в линиях 101 и 109 могут быть по величине приблизительно на порядок больше, чем выходной аналоговый сигнал в линии 103, без потери разрешающей способности в аналого-цифровом преобразователе 104.
[0043] Наличие цифровых линий связи, таких как 105, 107, 112 и 115, позволяет располагать контроллер 106, компьютер 111 или тот и другой на удалении от датчика 100 или на отдельных платформах. Эти конструктивные особенности являются предпочтительными, поскольку датчик отдаляется от помех, связанных с вычислительным оборудованием, и предоставляется возможность иметь компактный и легкий сенсорный блок 150. В таких случаях сенсорный блок 150 может быть физически отделен от других компонентов настоящего изобретения при использовании беспроводных средств передачи данных. Такая конструктивная особенность особенно предпочтительна, когда пространство и масса вблизи датчика могут быть в дефиците.
[0044] В соответствии с этим изобретение можно применять в электромагнитных (ЭМ) способах исследования ствола скважины, в которых датчик 100 можно помещать на буровое долото при нехватке пространства, в аэрометодах, в которых датчик можно устанавливать на беспилотный летательный аппарат или на изолированную от движения платформу, так что масса может быть небольшой, или на вращающиеся механизмы, во вредные взрывоопасные или находящиеся под высоким давлением среды, когда сенсорный блок следует герметизировать и устанавливать на расстоянии от компьютера 111 и контроллера 106 по механическим причинам, соображениям безопасности или логистическим причинам. В таких случаях, когда должен использоваться небольшой сенсорный блок 150, компенсацию можно выполнять с использованием цифровой линии связи для осуществления дальней связи с контроллером 106 и любыми периферийными устройствами.
[0045] Когда сильные первичные поля могут быть причиной паразитных сигналов, обусловленных индукцией в находящихся поблизости металлических компонентах или контурах заземления, компенсация с использованием цифровой линии связи обладает преимуществом вследствие удаления датчика 100 от этих возможных источников помех или от помех, наводимых или создаваемых в результате работы самого вычислительного оборудования.
[0046] На фигурах 3 и 4 показаны аспекты согласно варианту осуществления изобретения для случая, когда изобретение используется для компенсации первичного поля в активной электромагнитной системе. На фигуре 3 показан компенсированный приемник 350 электромагнитного поля, содержащий компенсатор. На фигуре 4 показаны аспекты согласно варианту осуществления изобретения, имеющие отношение к типичной активной электромагнитной системе с источником. В варианте осуществления показанном на фигурах 3 и 4, передатчик и компенсатор синхронизированы, но синхронизация их не является строго необходимой.
[0047] Электромагнитная система, показанная на фигуре 4, содержит возбуждающий источник 400, с которого ток передается по кабелю 401 для возбуждения передатчика 402. В одном варианте осуществления настоящего изобретения передатчик принимает управляющие сигналы по линии 301 с компенсированного приемника 350 электромагнитного поля. Передатчик 402 отдает ток в кабель 403 для излучающей петли 404. Ток, циркулирующий в петле 404, создает первичное магнитное поле, обнаруживаемое магнитным датчиком (МД) 100. Ток передатчика измеряется и значение его передается по входной линии 302 к компенсированному приемнику 350 электромагнитного поля. В некоторых вариантах осуществления настоящего изобретения, когда передатчик не синхронизирован с компенсатором, одна из двух линий 301 и 302 может не иметься или обе линии могут не иметься в обязательном порядке.
[0048] Что касается упомянутого выше варианта осуществления, в котором передатчик и компенсатор синхронизированы, то информация об управлении синхронизацией волновых сигналов может передаваться к передатчику 402 (фигура 4) по выходной линии 301 (фигура 3) с контроллера 106, который образует часть компенсированного приемника 350 электромагнитного поля. Результирующий токовый волновой сигнал передается в излучающую петлю 404, где он измеряется на входе 302 с помощью преобразователя 303 ток-напряжение (Т-Н). Затем результирующий выходной аналоговый сигнал, распространяющийся по выходной линии 304, преобразуется в цифровую форму аналого-цифровым преобразователем (ADC) 305. Результирующий, преобразованный в цифровую форму сигнал направляется по цифровой линии 306 для обработки контроллером 106.
[0049] В этом варианте осуществления токовый волновой сигнал может быть усреднен в течение нескольких циклов для образования типового волнового сигнала, который может быть использован для регулирования компенсирующего выходного сигнала контроллера 106. Соответственно, компенсирующий сигнал для первичного поля можно предсказывать с управляемой задержкой, чтобы в случае периодических сигналов компенсирующий сигнал можно было подавать обратно задержанным точно на один цикл. Типовой волновой сигнал можно использовать вместе с данными вспомогательных датчиков, такими данными, которые могут обеспечиваться изображениями с камеры или лазерной рефлектометрией, чтобы получать компенсирующий сигнал, регулируемый в случае изменений геометрии электромагнитной системы.
[0050] Следует понимать, что аспекты изобретения, в которых токовый волновой сигнал передается к компенсатору, могут быть выполнены иначе, а не так, как описано выше. Например, путь информации, несущей измерение токового волнового сигнала к компьютеру через последовательность входов 302, 304, 306 к 112, можно легко заменить входами 110. Имеются многочисленные способы, в соответствии с которыми изобретение может быть выполнено для манипулирования цифровыми входными данными и обработки их; чертежи предназначены для иллюстрации некоторых из огромного количества возможностей выполнения изобретения и не предполагаются ограничивающими объем формулы изобретения. Например, в других вариантах осуществления настоящего изобретения с передатчика может передаваться информация о синхронизации волновых сигналов непосредственно к компенсированному приемнику электромагнитного поля.
[0051] Нет абсолютной необходимости синхронизировать передатчик и компенсированный приемник электромагнитного поля. В другом варианте осуществления изобретения отсутствует сигнальная линия 301, компьютер пассивно осуществляет мониторинг волнового сигнала передатчика, приходящего по сигнальной линии 302 к линии 112. Вместо использования управляющей линии 301 для синхронизации периода и фазы токового волнового сигнала с компенсатором входящий волновой сигнал может анализироваться в компьютере в пределах скользящего окна времени для определения периода и фазы предсказываемого волнового сигнала. Затем результирующий предсказываемый волновой сигнал может быть передан к контроллеру 106, который инжектирует компенсирующий сигнал в расчетный синхронизированный момент времени. Такой вариант осуществления является предпочтительным как дополнительный, сочетаемый с существующей электромагнитной системой, поскольку он позволяет осуществлять компенсацию без каких-либо модификаций передатчика.
[0052] В соответствующем варианте осуществления не содержится ни одна из двух линий 301 и 302. Точнее, некомпенсированный сигнал может анализироваться в пределах скользящего окна времени для определения периода и фазы его и также для получения предсказываемого мгновенного волнового сигнала, например, при использовании взвешенного среднего по времени. Затем результирующий предсказываемый волновой сигнал может быть передан к контроллеру 106, который инжектирует компенсирующий сигнал в расчетный синхронизированный момент времени.
[0053] В дополнение к входным сигналам от вспомогательных датчиков предусматривается возможность регистрации геолокационных данных, таких, которые могут быть зарегистрированы с помощью глобальной системы местоопределения (GPS), системы ГЛОНАСС, систем лазерной, барометрической, гидролокационной и радиолокационной альтиметрии или других приборов аналогичного назначения. Геолокационные данные вводятся в компьютер 111 по линии 307 передачи данных и затем объединяются с потоком данных, выводимым по цифровой линии 113 связи.
[0054] Сигнал глобальной системы местоопределения или аналогичный независимый синхронизирующий сигнал можно использовать для получения синхронизированной информации о времени для передатчика и компенсатора от внешнего источника. В таком варианте осуществления синхронизация передатчика и компенсатора возможна без сигнальной линии 301.
[0055] В другом варианте осуществления настоящего изобретения, показанном на фигуре 5, обратная связь по магнитному полю используется для компенсации первичных магнитных полей вместо обратной связи по напряжению. В этом варианте осуществления сенсорный блок 150 заменяется сенсорным блоком 550, в котором функция обратной связи по напряжению, выполнявшаяся сумматором 102, заменяется функцией катушки 503 обратной связи на магнитном датчике (МД) 100. Вместо использования обратной связи по напряжению в сумматор магнитный датчик 100 образует сигнал в аналоговую линию 101, который затем преобразуется в цифровую форму аналого-цифровым преобразователем (ADC) 104. Цифровой сигнал выводится по цифровой линии 105 связи к контроллеру 106. В контроллере 106 входные цифровые сигналы с цифровых линий 105 и 112 связи используются для образования выходного цифрового компенсирующего сигнала, который передается по цифровой линии 107 связи к цифро-аналоговому преобразователю (DAC) 108, в котором он преобразуется в аналоговую форму. Затем аналоговый сигнал с цифро-аналогового преобразователя 108 передается по линии 109 к преобразователю напряжение-ток (Н-Т) 501, в котором он преобразуется в ток. Результирующий ток циркулирует в цепи 502, которая содержит катушку 503 обратной связи. Ток в катушке 503 обратной связи компенсирует магнитное поле в датчике 100 в соответствии с цифровым сигналом, выдаваемым контроллером 106 в цифровую линию 107 связи.
[0056] Изложенные выше варианты осуществления изобретения могут быть реализованы как часть электромагнитной разведочной системы. Их можно использовать для компенсации поворота магнитного датчика в статическом магнитном поле, таком как магнитное поле земли. Поэтому модель компенсации магнитного поля может включать в себя влияние первичного поля и влияние поворота датчика, а также любые другие эффекты магнитного поля, которые могут потребоваться. При компенсации поворота датчика вспомогательные входные данные могут содержать оценку полного магнитного поля, такую, какая может быть получена с помощью феррозондового магнитометра, или же такую, как оценка магнитного поля на основании международного эталона геомагнитного поля (IGRF), и ориентацию датчика, такую, какая может быть получена с помощью гироскопа, системы вертикали и курса (AHRS) или прибора с аналогичной функциональной возможностью, или скорость углового поворота датчика, такую, какая может быть получена с помощью спаренных акселерометров. Математическая теория вычисления сигнала, измеряемого магнитным датчиком, вращающимся в магнитном поле земли, известна из современного уровня техники, например, такая, какая предложена в Международной заявке WO2011/063510 A1 (Kuzmin and Dodds).
[0057] Еще один вариант осуществления изобретения показан на фигуре 6. В этом варианте осуществления функции контроллера 106 и компьютера 111 из фигуры 1 объединены в одном компьютере-контроллере 106/111. При этом цифровые линии 112 и 113 связи становятся ненужными, входные сигналы 110 и 307 от датчиков непосредственно связаны с компьютером-контроллером 106/111, а цифровая линия 115 связи приобретает дополнительную функцию цифровой линии 113 связи.
[0058] Согласно другому варианту осуществления изобретения компенсация может включать в себя поля линий электроснабжения, а также токовый волновой сигнал передатчика. Согласно еще одному варианту осуществления настоящего изобретения входные сигналы могут быть от датчиков, обнаруживающих перемещение подвижных механизмов или металлических деталей, для обеспечения эффективной компенсации магнитных полей, обусловленных перемещением ферромагнитных и электропроводных частей, таких, какие могут встречаться в производственной среде или на летательном аппарате.
[0059] Хотя изобретение было показано и описано применительно к примерам вариантов осуществления, следует понимать, что это изобретение не ограничено этими конкретными вариантами осуществления и что многочисленные изменения и модификации могут быть сделаны без отступления от истинной сущности и объема изобретения, определенных в прилагаемой формуле изобретения.
Способ получения марганцевых окатышей из некальцинированной марганцевой руды и агломерат, полученный данным способом
Способ ингибирования выброса твердых частиц во время трения термообработанных железорудных окатышей и применение спиртового побочного продукта для ингибирования выброса твердых частиц
Способ получения хлорида калия
Прямая очистка латеритно-никелевого выщелачивающего потока
Способ извлечения металлов из латеритовых руд
Система и способ извлечения редкоземельных элементов
Применение углеродных нанотрубок в агломератах рудной мелочи для повышения механической прочности
Способ разработки калиевых солей из подземного месторождения
Извлечение базовых металлов из сульфидных руд и концентратов
Способ улучшения селективности и извлечения при флотации сульфидных никелевых руд, которые содержат пирротин, путем использования синергии множества депрессоров
Пневматическая система подвески и виброзащиты, в которой применяются низкофрикционные тросовые демпферы
Компенсирующая цепь для нейтрализации магнитного поля

