Результат интеллектуальной деятельности: Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели (варианты) и радиолокационный комплекс для его осуществления (варианты)
Вид РИД
Изобретение
Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных комплексах (РЛК), состоящих из радиолокационных модулей (РЛМ): радиолокационных станций (РЛС) или приемо-передающих модулей.
РЛК предназначены для управления воздушным движением и для контроля воздушного пространства. Необходимым условием обеспечения этого управления и контроля является знание координат всех целей, находящихся в зоне ответственности радиолокационного комплекса. Для этого измеренные координаты целей при первичном обнаружении должны уточняться в процессе их движения, т.е. цели должны сопровождаться.
Известен способ обзора пространства и сопровождения траекторий целей, основанный на обнаружении цели в режиме обзора и выработке стробов сопровождения траекторий целей. (С.З. Кузьмин «Основы проектирования систем цифровой обработки радиолокационной информации», М., «Радио и связь», 1986, с. 108-110, с 115, 1 абз. сверху). Переход от режима обзора к режиму сопровождения начинается с обнаружения РЛС новой отметки (новой цели), которую принимают за начальную отметку предполагаемой траектории новой цели.
На основе априорных данных об этой цели формируют строб первичного захвата для второго обзора, на основании которого уточняют параметры строба для третьего обзора. Если в этот строб попала отметка в третьем обзоре, то она считается принадлежащей обнаруживаемой траектории, по ее положению в стробе 3-го обзора уточняют параметры строба на 4-й обзор и т.д. После выполнения установленного критерия по числу отметок, попавших в j последовательно образованных стробов, принимают решение об обнаружении траектории и ее передают на сопровождение.
Для обеспечения в режиме обзора надежного контроля всего пространства и создают радиолокационные комплексы на основе РЛМ. В состав РЛК включают РЛМ, работающие в одном диапазоне (Кондратьев B.C. и др. Многопозиционные радиотехнические системы. М.: Радио и связь, 1986, с. 14, 15. Справочник по радиолокации, под ред. Сколника. М.: Сов. Радио, 1978, т. 4, с. 194, 3 абз. снизу) или в различных: например, метровых, дециметровых и сантиметровых диапазонах волн (патент RU №2145093, много диапазонный комплекс).
В первом варианте РЛК состоит из n≥2 разнесенных в пространстве радиолокационных модулей и модуля обработки (МО), входы-выходы РЛМ соединены с выходами-входами МО, а выход МО является выходом РЛК; а во втором - часть РЛМ выполнены с длиной волны λk, а остальные - с длинами волн λd>λk.
Сопровождение цели однодиапазонным комплексом может выполняться одним РЛМ или поочередно при независимом периоде обзора каждым РЛМ при проходе лучом его антенны направления на сопровождаемую цель.
Известен способ обзора и сопровождения целей многодиапазонным комплексом (патент RU 2150716), суть которого состоит в следующем. Обзор пространства и сопровождения трасс целей осуществляют с помощью РЛС1, РЛС2, …, РЛСn с длинами волн соответственно λ1>λ2>…>λn, n≥2, при этом для уточнения угловых координат целей (для разрешения целей), обнаруженных РЛС1 применяют РЛС последовательно от РЛС2, использующей данные РЛС1 до РЛСn, использующей данные РЛС(n-1). При сопровождении цели конечная точность измерения угловых координат определяется РЛСn с наименьшей длиной волны.
Оба известных РЛК, используя известные способы обзора и сопровождения, обнаруживают и сопровождают цели в активном режиме.
Недостаток известных способов сопровождения целей с помощью известных РЛК заключается в том, что РЛК при сопровождении излучающей или подсвечиваемой внешними радиоэлектронными средствами (РЭС) (далее излучающей) цели используют активный режим, не используя излучений самой цели и подсвета цели внешними РЭС.
Известны способы использования энергии излучения бортовых источников энергии целей и энергии отражений за счет подсвета цели внешними (посторонним) РЭС.
Известен способ радиолокационного обнаружения и сопровождения цели, основанный на том, что сопровождение цели ведут с помощью длинноволновой РЛС в активном ее режиме определения дальности до цели и в пассивном - определение пеленгов по излучениям цели (патенты RU №2137152, №2194289).
Известен способ контроля воздушного пространства, основанный на том, что излучают сигнал РЛС только в те направления зоны, в которых обнаружена отраженная энергия внешних РЭС (патент RU №2215303).
Известен способ радиолокационного обнаружения и сопровождения цели, основанный на том, что осуществляют обнаружение цели в активном режиме работы РЛС в запеленгованном по излучениям цели направлении и ведут сопровождение (патент RU №2149421).
Недостаток этих способов состоит в необходимости использования активного режима работы РЛС при сопровождении.
Известен способ определения координат целей, основанный на приеме прямого излучения источника внешнего РЭС и отраженного от цели (патент RU №2226701); его недостаток - в необходимости приема прямого излучения.
Известен способ обнаружения и определения координат целей, основанный на использовании излучений РЛС, расположенных за горизонтом, с известными координатами (например, РЛС сопредельных государств) (патент RU №2530808); основной его недостаток - в необходимости знания координат РЛС и ее параметров.
Наиболее близким способом является триангуляционный (Справочник по радиолокации, под ред. Сколника. М.: Сов. Радио, 1978, т. 4, с. 194, 2-й абз. снизу), позволяющий кроме определения пеленгов вычислять дальность до цели из соотношений треугольника, образованного пересекающимися пеленгами и линией, соединяющей точки расположения пеленгаторов.
Недостаток этого способа состоит в том, что при использовании его в РЛК нужно проводить осмотр строба сопровождения цели n≥2 РЛМ в одном ограниченном интервале времени, особенно в случае дискретного характера излучений, что исключает возможность независимого сопровождения ими целей, а это усложняет управление комплексом; кроме того для этого способа характерна возможность появления ложных целей (там же, а также с. 203, 2-й абз. сверху).
Решаемой технической проблемой заявляемых изобретений (техническим результатом) является сокращение времени использования активного режима РЛМ при независимом сопровождении ими трассы излучающей цели и исключение ложных целей.
Техническая проблема решается на основе использования при сопровождении трассы цели в пассивном режиме после обнаружения ее в активном режиме триангуляционного способа при пространственном разносе РЛМ в РЛК и может решаться двумя способами.
Заявленный технический результат по первому варианту заявляемого способа (п. 1 формулы) достигается тем, что в способе сопровождения траектории излучающей цели, основанном на пеленгации ее из разнесенных в пространстве точек по излучениям (отражениям) и на вычислении дальности до цели, согласно изобретению пеленгацию цели выполняют с помощью n≥s≥2 радиолокационных модулей (РЛМ), входящих в радиолокационный комплекс, состоящий из n≥2 РЛМ, при этом РЛМ в едином времени обмениваются параметрами графиков изменения пеленга, на основе экстраполяции параметров графиков вычисляют прогнозируемые дальности, вырабатывают стробы сопровождения по пеленгам и дальности и после обнаружения трассы цели в активном режиме ведут ее сопровождение в пассивном режиме.
Тем, что в радиолокационном комплексе для сопровождения трассы излучающей цели, состоящий из n≥2 разнесенных в пространстве радиолокационных модулей (РЛМ) и модуля обработки (МО), входы-выходы РЛМ соединены с выходами-входами МО, а выход МО является выходом РЛК, согласно изобретению в n≥s≥2 РЛМ введены пеленгаторы цели, входы-выходы информации о пеленгах цели каждого из n≥s≥2 РЛМ взаимно соединены с выходами-входами.
Так же тем, что согласно изобретению часть РЛМ выполнены с длиной волны λk, а остальные - с длинами волн λd>λk
Так же тем, что согласно изобретению в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
Так же тем, что согласно изобретению РЛМ размещают в пространстве с разносом, определяемым заданной точностью измерения дальности в плоскости разноса триангуляционным методом.
Заявленный технический результат по второму варианту заявляемого способа (п. 6 формулы) достигается тем, что в способе сопровождения траектории излучающей цели, основанным на пеленгации ее из разнесенных в пространстве точек по излучениям (отражениям) и на вычислении дальности до цели, согласно изобретению пеленгацию цели выполняют с помощью n≥s≥2 радиолокационных модулей (РЛМ), входящих в радиолокационный комплекс, состоящий из n≥2 РЛМ и модуля обработки (МО), при этом в МО на основе экстраполяции данных о пеленгах, получаемых в РЛК, вычисляют прогнозируемые дальности, вырабатывают стробы сопровождения по пеленгам и дальности и после обнаружения трассы цели в активном режиме ведут ее сопровождение в пассивном режиме.
Тем, что в радиолокационном комплексе для сопровождения трассы излучающей цели, состоящий из n≥2 разнесенных в пространстве радиолокационных модулей (РЛМ) и модуля обработки (МО), входы-выходы РЛМ соединены с выходами-входами МО, а выход МО является выходом РЛК, согласно изобретению в n≥s≥2 РЛМ введены пеленгаторы цели или один из них введен в МО, выходы информации о пеленгах цели РЛМ соединены со входами МО.
Так же тем, что согласно изобретению в РЛК часть РЛМ выполнены с длиной волны λk, а остальные - с длинами волн λd>λk.
Так же тем, что согласно изобретению в РЛК в качестве РЛМ используют радиолокационные станции или приемо-передающие модули.
Так же тем, что согласно изобретению РЛМ размещают в пространстве с разносом, определяемым заданной точностью измерения дальности в плоскости разноса триангуляционным методом.
Заявляемые способы по первому и второму вариантам отличаются тем, что по первому варианту построение графиков изменения пеленга цели и их совмещение выполняют в каждом из s≥2 РЛМ, а по второму варианту - в МО по данным РЛМ.
Различия способов по первому (п. 1 формулы) и второму (п. 6 формулы) вариантам привели к различиям в структуре РЛК (п. 2 и п. 7 формулы соответственно): для обеспечения обмена информацией РЛМ о графиках изменения пеленгов в РЛК по п. 2 формулы входы-выходы каждого из n≥s≥2 РЛМ взаимно соединены с выходами-входами; для РЛК по п. 7 формулы этого не требуется, т.к. в способе по п. 6 формулы по данным о пеленгах, получаемых от РЛМ, прогнозируют положения пеленгов, на основе прогнозов вырабатывают стробы сопровождения по пеленгам и дальности и ведут сопровождение в пассивном режиме в МО.
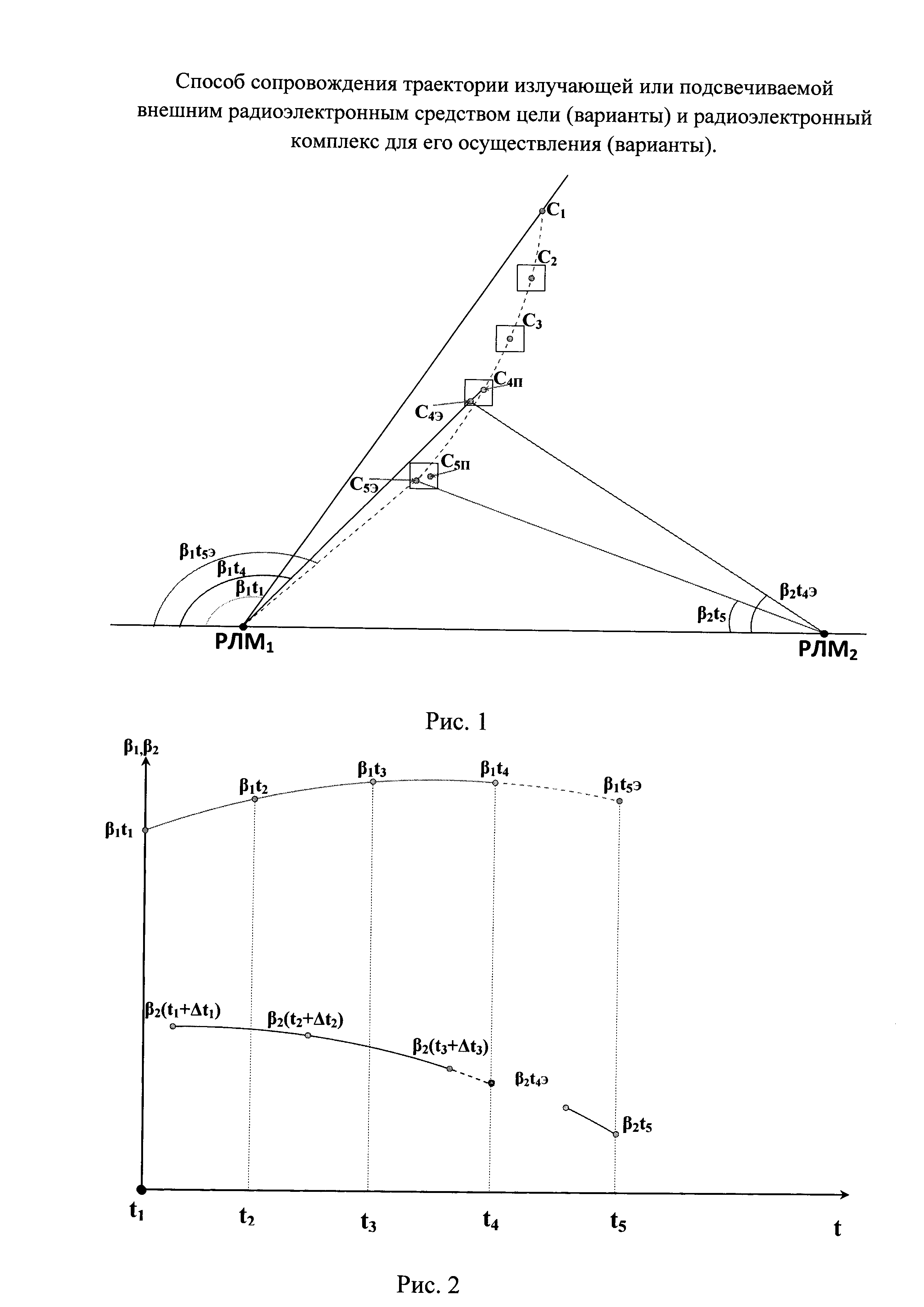
Изобретения иллюстрируются рис. 1, на котором поясняется процесс обнаружения трассы цели в активном режиме и начало сопровождения ее в пассивном режиме, и рис. 2, на котором показан процесс построения графиков изменения пеленгов, определяемых при независимом обзоре РЛМ1 и РЛМ2, и процесс экстраполяции графиков.
Поясним суть изобретений на примере работы двухкоординатных РЛМ1 и РЛМ2, в которые в дополнение к активному радиолокационному каналу введены пассивные (пеленгаторы), в соответствии с п.п. 2, 7 формулы изобретения.
Рассмотрим для примера начальный вариант работы по новой цели, когда направления лучей антенн активного и пассивного каналов совпадают и момент облучения цели РЛМ1 опережает РЛМ2.
При обнаружении в момент времени t1 активным каналом РЛМ1 первой отметки С1 от излучающей цели с помощью пассивного канала определяют пеленг на эту цель β1t1 (рис. 1, рис. 2). К моменту выполнения критерия обнаружения трассы цели в активном режиме (выполнение критерия с j стробами, см. л. 2) по данным пассивного канала РЛМ1 будет построен график изменения пеленга, состоящий из j точек; аналогично будет построен график по данным пассивного канала РЛМ2, состоящий из (j-1) точек (при равенстве периодов обзора РЛМ1 и РЛМ2) (см. рис. 1).
По данным активного канала РЛМ1, например, к моменту времени t4 будет принято решение о передаче цели на сопровождение и будет выставлен строб сопровождения с прогнозируемым положением цели С4п в центре строба. Начиная с этого момента времени активный режим РЛМ1, РЛМ2 по этой цели не используют.
В момент времени t4 по данным пеленгатора PЛM1 определен азимут β1t4 (рис. 1, рис. 2), а по данным пеленгатора РЛМ2 имеются данные только на момент t3<t4, поэтому за счет экстраполяции его графика определяют  (пунктир на рис. 2). Точку пересечении пеленгов С4э принимают за положение цели в момент времени t4, учитывают ее параметры для установки строба для момента времени t5. В момент времени t5 по данным пеленгатора РЛМ2 определен азимут β2t5, а данные от пеленгатора РЛМ1 имеются только на момент t4<t5, поэтому за счет экстраполяции его графика определяют
(пунктир на рис. 2). Точку пересечении пеленгов С4э принимают за положение цели в момент времени t4, учитывают ее параметры для установки строба для момента времени t5. В момент времени t5 по данным пеленгатора РЛМ2 определен азимут β2t5, а данные от пеленгатора РЛМ1 имеются только на момент t4<t5, поэтому за счет экстраполяции его графика определяют  (пунктир на рис. 2) и т.д.
(пунктир на рис. 2) и т.д.
Дополнение признаков триангуляционного способа другими признаками в заявляемом способе устраняет указанную выше проблему ложных целей, присущую триангуляционному способу, поскольку обнаружение траектории реальной цели осуществляют в активном режиме и потому в заявляемом способе сопровождают трассы только реальных целей.
Таким образом, процесс сопровождения траектории излучающей цели осуществляют без использования активного режима РЛМ1 РЛМ2 и при отсутствии ложных целей. Этим достигается заявленный технический результат.
Способ распознавания радиолокационных объектов
Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели
Способ защиты радиолокационной станции от не обнаруживаемых малоразмерных беспилотных летательных аппаратов и устройство для его осуществления
Способ защиты радиолокационной станции от малоразмерных беспилотных летательных аппаратов и устройство для его осуществления
Способ обзора пространства (варианты)
Способ диагностики фазированной антенной решётки
Способ компенсации помех и радиолокационная станция для его осуществления
Способ контроля работоспособности радиолокационной станции и комплекс для его осуществления
Способ экстраполяции параметров траектории сопровождаемого объекта
Способ радиолокационного обзора пространства (варианты)
Двухэтапный способ радиолокационного обнаружения цели
Способ двухэтапного радиолокационного обнаружения цели
Способ радиолокационного обзора пространства
Двухэтапный способ измерения координат цели и устройство для его осуществления
Способ сопровождения цели обзорной радиолокационной станцией (варианты)
Способ радиолокационного обзора пространства
Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления
Способ радиолокационного обзора пространства (варианты).
Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели

