Результат интеллектуальной деятельности: Лопасть несущего винта вертолета
Вид РИД
Изобретение
Изобретение относится к области авиации, в частности к устройствам для управления изменением мгновенного значения подъемной силы на эффективном отрезке несущей поверхности лопасти для снижения периодических нагрузок на лопасть от азимутального взаимодействия ее с аэродинамическим потоком, следствием чего является снижение вибрации вертолета в целом.
Благодаря способности вертикально взлетать и садиться, зависать в воздухе вертолеты занимают уникальное место в авиации. В то же время полет на вертолете для пассажиров и членов экипажа сопряжен с дискомфортом, вызванным высоким уровнем вибраций в кабине. Вибрации также снижают усталостную прочность конструкции, сокращают ресурс, снижают эффективность бортового электронного и вычислительного оборудования, критичного для выполнения заданий по предназначению: навигационного, управления полетов, системы управления вооружением. В течение нескольких десятилетий ведется значительная работа по снижению уровня вибраций вертолета.
Причин возникновения колебаний вертолета много: редуктор, двигатель, хвостовой винт. Однако больше всего колебаний порождает система несущего винта. Максимум вибраций приходится на два режима: переходной с малыми поступательными скоростями и установившийся полет с высокой поступательной скоростью.
На переходных режимах (обычно взлет и посадка) высокий уровень вибраций определяют импульсные нагрузки, индуцированные взаимодействием лопастей и срывом потоков с законцовок лопастей. Такие условия обычно описываются как вихревое взаимодействие лопастей. В крейсерском полете в диапазоне средних и высоких скоростей вибрации вызывают, главным образом, аэродинамические условия, в которых работают лопасти. Периодическое изменение аэродинамических нагрузок на лопасти приводит к периодическому изменению скоростей обтекающего лопасть потока и угла атаки лопасти, а значит, и к периодическому изменению действующих на лопасти нагрузок.
Для экстремально высокой скорости уровень вибраций резко увеличивается из-за образования на наступающих лопастях ударных волн (при этом резко увеличивается лобовое сопротивление и момент тангажа) и срыва потока на отступающих лопастях (потеря подъемной силы) в каждом обороте винта.
Одним из направлений борьбы с вибрацией на больших скоростях полета вертолета является применение на лопастях несущего винта активного органа управления - закрылка. Применение на лопастях несущего винта активных органов управления позволяет создать приращение силы тяги противоположного знака, равное величине пульсации силы в данной момент времени.
Известны аналоги лопасти с отклоняемыми закрылками.
Так, в патенте (№ ЕР 2860108, МПК В64С 27/615, 2015 г.) приводится описание лопасти с отклоняемым закрылком, приводимым в движение при помощи двух линейных приводов, расположенных в поле действия центробежных сил и линейной трансмиссии состоящей из тяг, блоков, гибких лент и реечно-винтового преобразователя, также расположенного в поле центробежных сил.
Недостатком данной конструкции является расположение приводов и реечно-винтового преобразователя в поле действия центробежных сил. Воздействие центробежной силы на привод будет выражаться в увеличении усилия в одном направлении и уменьшении усилия в другом, что не позволит равномерно управлять закрылком. У реечно-винтового преобразователя возможно заклинивание шариков в пазах при воздействии центробежной силы, что будет приводить к заклиниванию всего агрегата. Если пазы сделать шире, то появится люфт привода, что приведет к вибрации закрылка в потоке. Также за счет сложного механизма преобразования движения быстродействие системы управления будет низкое.
Известна лопасть с отклоняемым закрылком (патент № ЕР 2851294, МПК В64С 27/615, 2015 г.), где закрылок приводится в движение валом, проходящим внутри лопасти от рукава втулки до привода закрылка. Управление производится с помощью дополнительного автомата перекоса и механизма суммирования при помощи тяг.
Недостатком данной конструкции является невозможность установить закрылок дальше комлевой зоны лопасти, т.к. в средней части лопасть изгибается в плоскости взмаха под действием изгибающего момента. В таких условиях вал привода закрылка заклинит в подшипниках или согнет. При этом максимальная эффективность закрылка будет именно в средней части лопасти, а у комля она практически нулевая. Данная конструкция привода с дополнительным автоматом перекоса и механизмом суммирования сильно усложняет и перегружает конструкцию системы управления. При этом закрылок может работать только на одной, установленной конструктивно, частоте привода.
Известна лопасть с отклоняемым закрылком (патент № ЕР 2703285, МПК В64С 27/615, 2014 г.), где закрылок приводится в движение двумя приводами, расположенными вдоль лопасти напротив друг друга. Привод осуществляется через механический преобразователь, который преобразует продольное движение привода в поперечное движение тяги управления закрылком.
Недостатком данной конструкции является расположение приводов в поле действия центробежных сил. Воздействие центробежной силы на привод будет выражаться в увеличении усилия в одном направлении и уменьшении усилия в другом, что не позволит равномерно управлять закрылком. Также данная конструкция механического преобразователя снижает быстродействие всей системы. Центр масс привода расположен сзади оси жесткости лопасти, что неизбежно сместит центровку назад. Это может привести к флаттеру винта.
Известна лопасть с отклоняемым закрылком (патент № ЕР 2674360, МПК В64С 27/615, 2013 г.), где приводом является электрический двигатель постоянного тока с редуктором, преобразующим вращательное движение двигателя в поступательное движение тяги привода через качалку.
Недостатком данной конструкции является расположение электродвигателя с редуктором в поле действия центробежных сил. Воздействие центробежной силы на привод будет выражаться в увеличении усилия в одном направлении и уменьшении усилия в другом, что не позволит равномерно управлять закрылком. Использованный в качестве привода электродвигатель с редуктором является изделием с малым быстродействием, что будет существенным ограничением в использовании привода для управления закрылком.
Известна лопасть с отклоняемым закрылком (патент № ЕР 2514669, МПК В64С 27/615, 2012 г.), где привод присоединен непосредственно к механизму выдвижения закрылка и расположен перпендикулярно оси лопасти.
Недостатком данной конструкции является расположение всех элементов привода в задней части лопасти, что негативно скажется на центровке лопасти и это приведет к флаттеру винта. Следует отметить также небольшой размер закрылка и малый угол его поворота, т.е. эффективность закрылка как элемента управления будет маленькой.
Известна лопасть с отклоняемым закрылком (патент № ЕР 2769915, МПК В64С 27/615, 2014 г.), где один закрылок приводится в движение двумя приводами с различным направлением поворота закрылка. Один привод поворачивает закрылок вниз, а другой вверх с помощью ленточных тяг.
Недостатком данной конструкции является сложная конфигурация рамы крепления приводов и закрылка, которая при изгибе лопасти в плоскости взмаха будет мешать работе элементов привода, а также необходимость согласовывать между собой работу обоих приводов.
Известна лопасть с отклоняемой задней кромкой (патент № RU 2603707, МПК В64С 27/615, 2016 г.), где задняя кромка имеет вид закрылка, который приводится в движение пьезоэлектрическим приводом, расположенным в передней части лопасти, через систему передачи движения (передаточный механизм), включающую рычаг и тягу, соединенную с закрылком. Пьезоэлектрический привод управляется через систему автоматического управления. Рычаг имеет изгиб, повторяющий профиль лопасти и позволяет тягой обогнуть лонжерон лопасти. Рычаг преобразует малый ход пьезопривода в приемлемое перемещение закрылка. Закрылок выполнен как часть профиля лопасти и занимает приблизительно 1/3 хорды. Данное техническое решение было принято за прототип.
Недостатком данной конструкции является выполнение закрылка как части профиля лопасти в пределах 1/3 хорды. Следствием этого является большая толщина передней части закрылка, что в свою очередь приводит к большому весу конструкции, соответственно, к большому моменту инерции закрылка и повышенной мощности пьезопривода и снижению быстродействия всей системы. Также данная конструкция ограничивает длину закрылка, из-за большого веса конструкции и особенности расположения закрылка в профиле лопасти (лопасть по длине изгибается при вращении винта). Немаловажное значение имеет тот факт, что расположение закрылка внутри профиля лопасти (наличие щелей между закрылком и неподвижными частями лопасти) как неподвижный закрылок, так и работающий, ухудшает аэродинамические характеристики профиля по сравнению с профилем без закрылка. Лопасть вертолета имеет небольшую хорду, поэтому плечо аэродинамического момента закрылка относительно фокуса лопасти небольшое.
Задачей изобретения является создание конструкции закрылка с минимальным весом и минимальными размерами (без потери аэродинамической эффективности), соответственно минимальным моментом инерции для уменьшения мощности, размеров и веса пьезопривода, соответственно, повышению быстродействия всей системы. Это также позволит конструктивно разместить закрылок практически в любой части лопасти по длине, даст возможность увеличить аэродинамический момент закрылка относительно фокуса лопасти и самое главное конструкция закрылка минимально будет ухудшать аэродинамические характеристики профиля лопасти.
Техническим результатом является увеличение быстродействия, точности и четкости работы системы и расширения возможностей автоматического управления аэроупругими явлениями на лопасти. Техническим результатом также является улучшение аэродинамических характеристик системы профиль лопасти - закрылок.
Решение задачи и технический результат достигаются тем, что в лопасти несущего винта вертолета, включающей закрылок с пьезоэлектрическим приводом, и встроенный в корпус лопасти передаточный механизм, содержащий рычаг и тягу, соединенную с закрылком, и систему автоматического управления, закрылок выполнен в виде триммерной пластины, расположенной вне аэродинамического профиля в задней части лопасти. Ширина триммерной пластины составляет не более 10% хорды лопасти. Триммерная пластина закреплена с возможностью отклонения в обе стороны от профиля лопасти. Рычаг передаточного механизма прямой, а тяга расположена перпендикулярно продольной оси лопасти. Триммерная пластина соединена с профилем посредством узла навески, при этом триммерная пластина имеет утолщение в передней части и занимает часть задней кромки профиля на глубину от 10 мм до 20 мм.
На чертежах изображены:
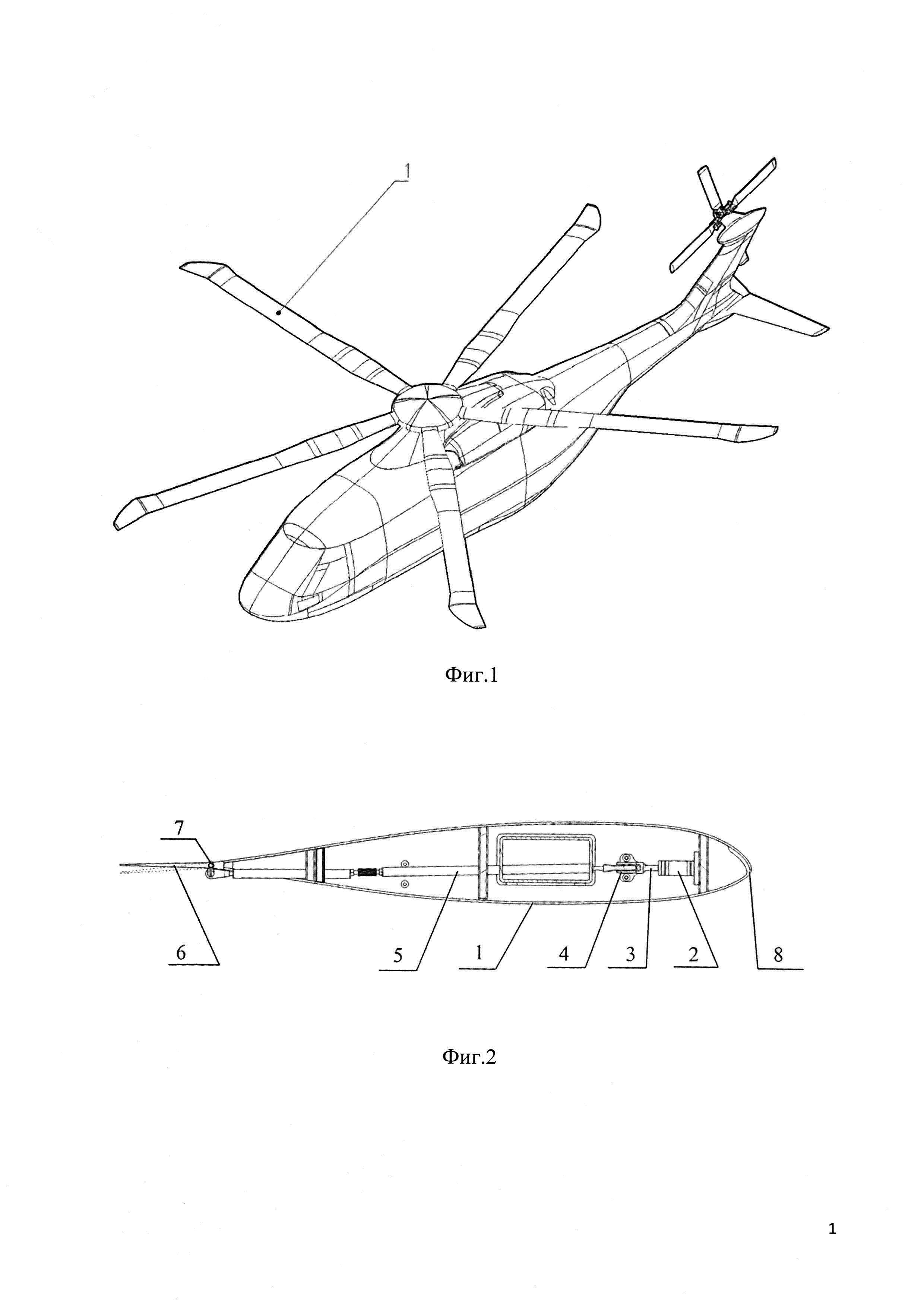
Фиг. 1 - общий вид вертолета;
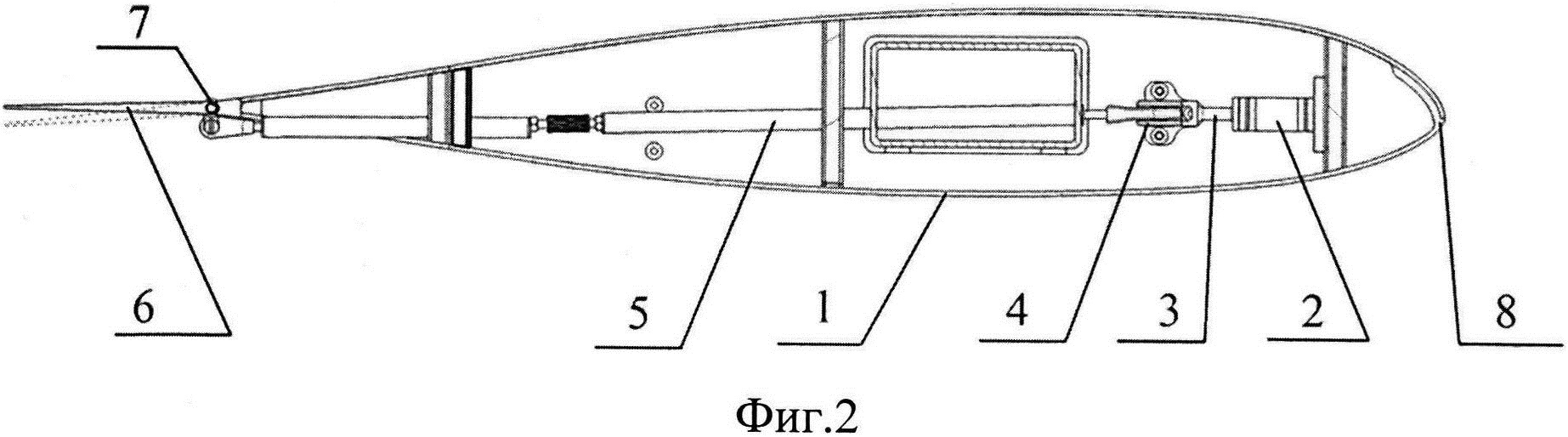
Фиг. 2 - профиль лопасти винта вертолета с отклоняемой триммерной пластиной;
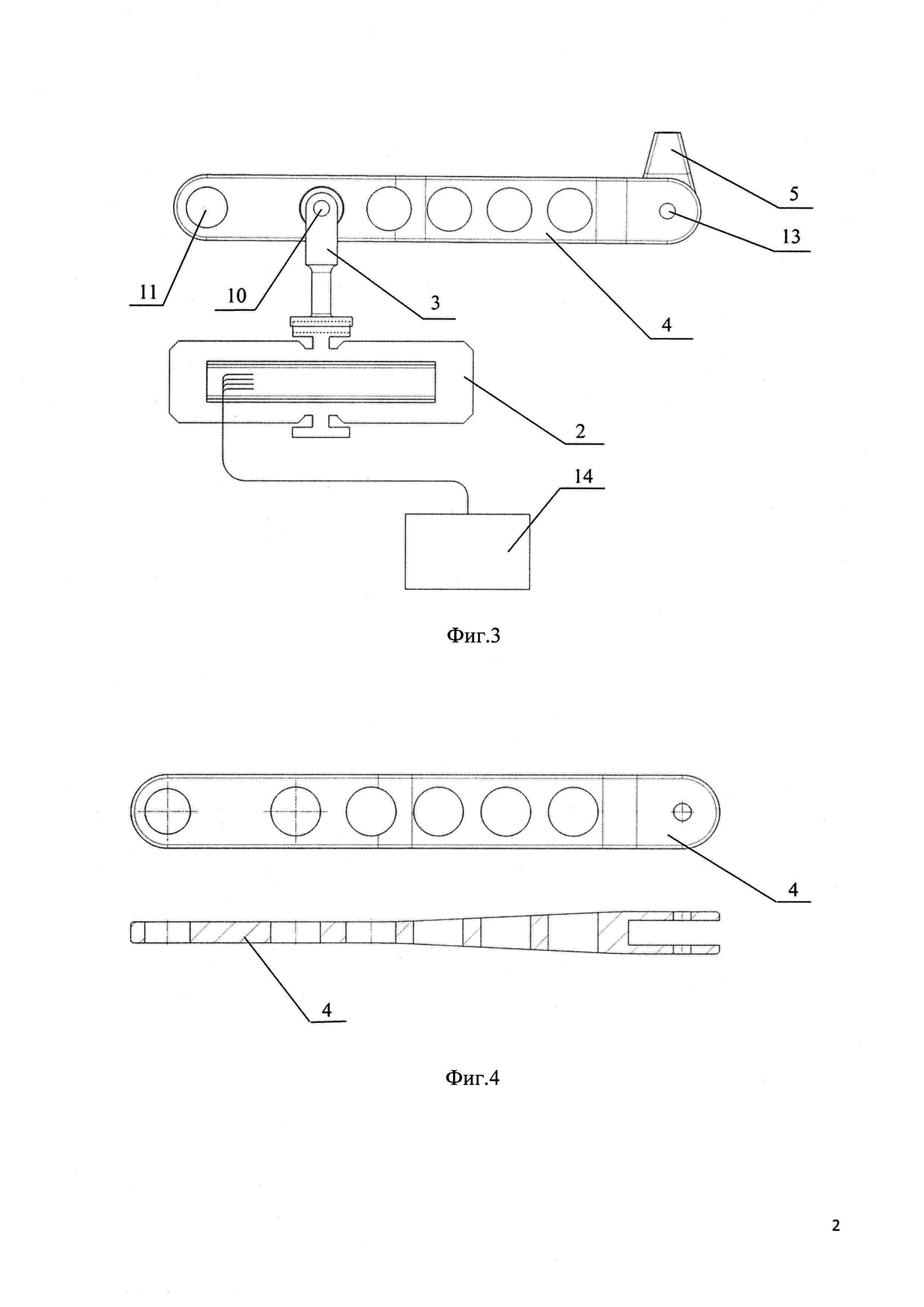
Фиг. 3 - схема передаточного механизма;
Фиг. 4 - рычаг, вид сбоку;
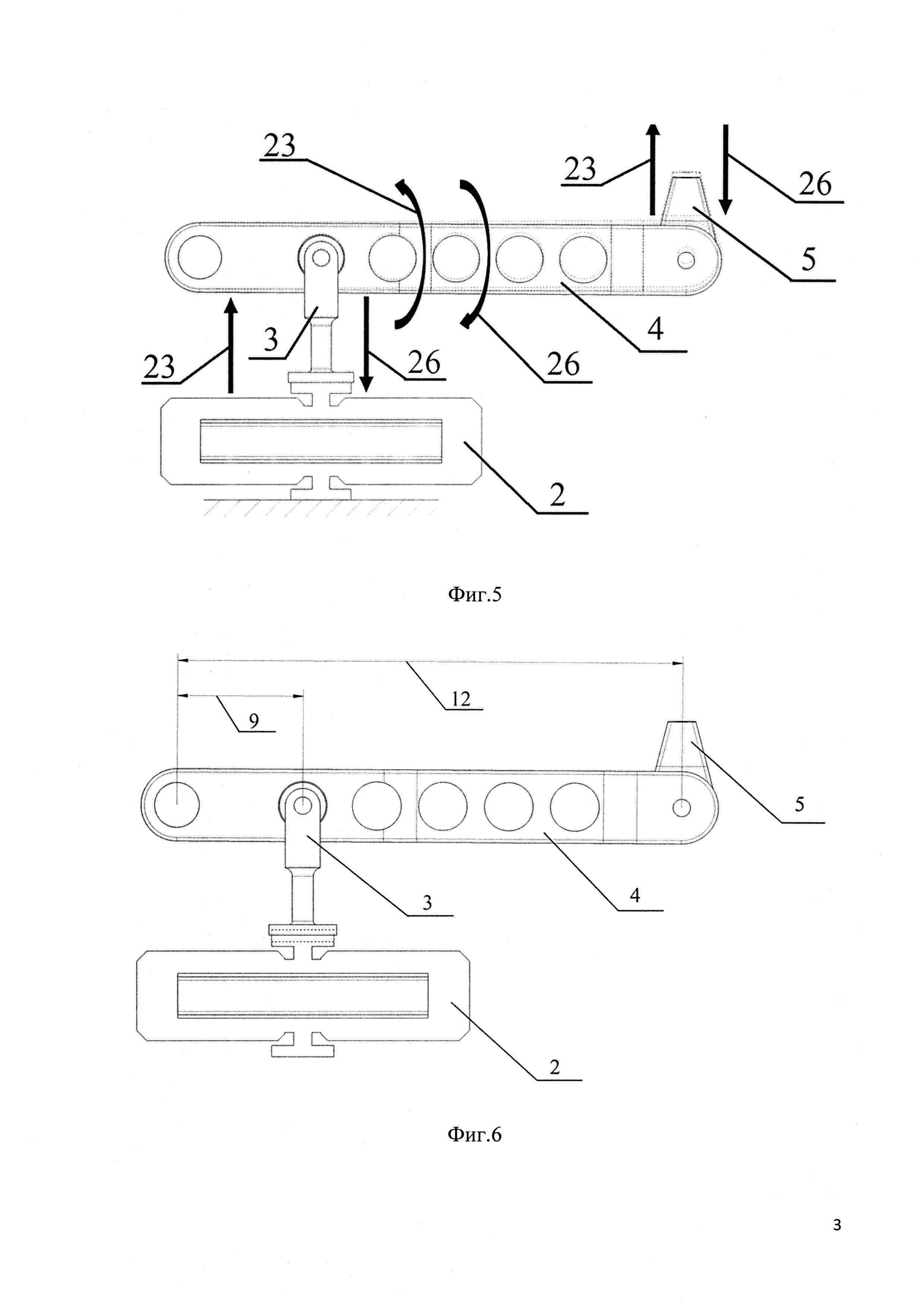
Фиг. 5 - кинематическая схема передаточного механизма;
Фиг. 6 - плечи рычага;
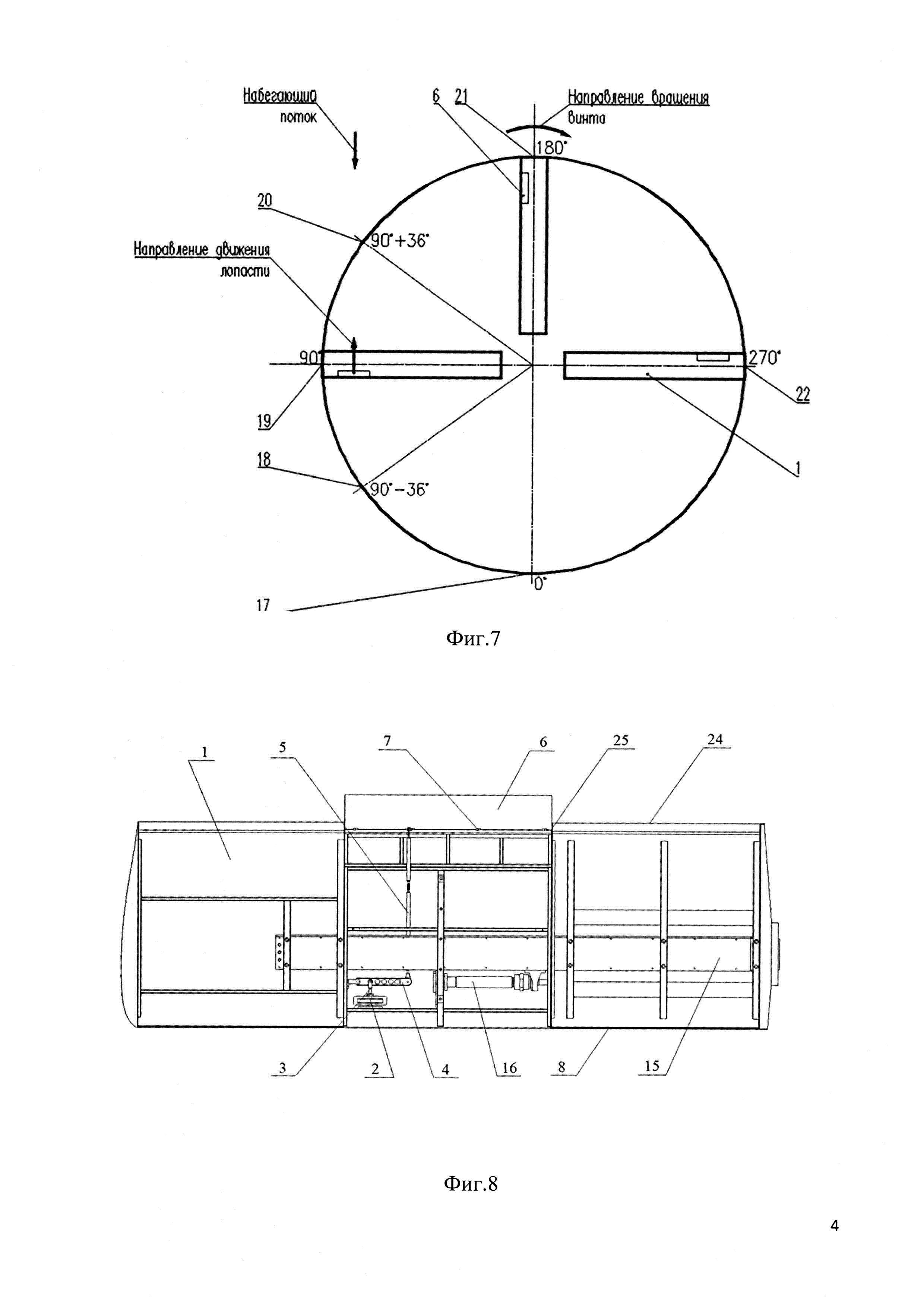
Фиг. 7 - взаимодействие лопасти винта с потоком;
Фиг. 8 - схема модели лопасти для продувки в аэродинамической трубе (АДТ) с расположением основных конструктивных элементов;
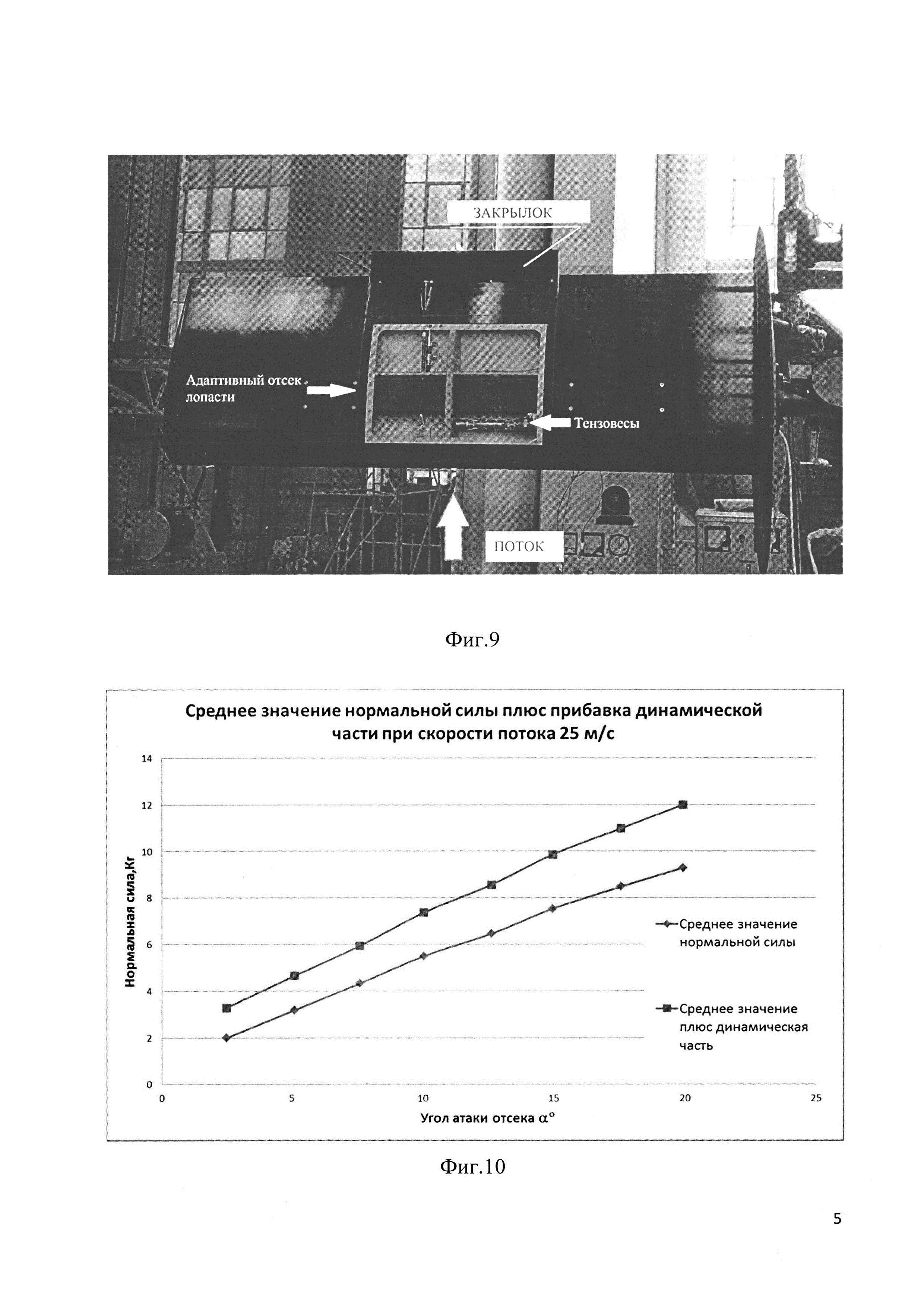
Фиг. 9 - общий вид модели для продувки в АДТ;
Фиг. 10 - график зависимости аэродинамической нормальной силы, измеренной тензовесами лопасти с неработающим и работающим закрылком.
Лопасть 1 несущего винта вертолета (Фиг. 1) имеет встроенный пьезопривод 2 (Фиг. 2), передаточный механизм, включающий малую тягу 3, рычаг 4 для увеличения хода триммерной пластины, длинную тягу 5, соединенную с триммерной пластиной 6, закрепленную с помощью узлов навески 7 на лопасти 1. Пьезоэлектрический привод 2 (Фиг. 8) установлен в передней части лопасти 8. С помощью тяги 3 пьезопривод 2 соединен с рычагом 4 на малом плече 9 (Фиг. 6) посредством шарнира 10 (Фиг. 3). Рычаг 4 установлен вдоль оси лопасти 1 на подшипниковом узле 11 (Фиг. 3) в плоскости работы пьезоэлектрического привода 2. На большом плече 12 (Фиг. 6) рычага 4 установлена тяга 5 триммерной пластины 6 при помощи шарнира 13 (Фиг. 3). Другая сторона тяги 5 через шарнирный узел крепится к триммерной пластине 6 (Фиг. 2). Тяги 3 и 5 расположены перпендикулярно продольной оси лопасти. Управление пьезоприводом осуществляется системой автоматического управления 14 (Фиг. 3). На фиг. 8 показана схема модели лопасти, основным силовым элементом которой, является лонжерон 15.
Работает устройство следующим образом.
При включении пьезоэлектрического привода 2 (Фиг. 5), последний обеспечивает прямой рабочий ход 23 тяги пьезопривода 3 в направлении, перпендикулярном оси лопасти 1. Тяга пьезопривода 3 приводит в движение рычаг 4 на малом плече 9 (Фиг. 6). На большом плече 12 с увеличенным ходом (примерная редукция 1/5) пьезопривод 2 через рычаг 4 приводит в движение тягу триммерной пластины 5, которая в свою очередь поворачивает триммерную пластину 6 (Фиг. 2). Пьезоэлектрический привод 2 (Фиг. 5) при помощи обратного хода 26 возвращает устройство в исходное положение. При помощи системы автоматического управления 14 (Фиг. 3) пьезоэлектрическим приводом 2 можно менять частоту его работы, а также длину хода. Изменением частоты работы пьезопривода 2 можно подбирать частоту работы триммерной пластины 6 под необходимую частоту вращения несущего винта, а также подбирать режим работы триммерной пластины 6 под нужную частоту возбуждения винта (обычно лопастную), которую в данный момент необходимо компенсировать. Изменением длины хода подбирается необходимая величина мгновенного значения подъемной силы под определенную нагрузку на несущий винт, в зависимости от режима полета.
Рассмотрим принцип работы лопасти 1 с закрылком 6 на примере наступающей лопасти 1 (идущей навстречу набегающему потоку) (Фиг. 7) несущего винта. Лопасть 1 при движении по азимуту винта в направлении вращения, при переходе из заднего положения 17 вдоль оси вертолета в положение 19, соответствующее 90°, перпендикулярно набегающему потоку испытывает резкое возрастание подъемной силы только на этой лопасти 1 в данный момент времени. Далее при переходе лопасти 1 в переднее положение 21, соответствующее 180°, вдоль оси вертолета подъемная сила резко снижается, т.к. набегающий поток проходит параллельно оси лопасти 1. Резкий скачок подъемной силы подбрасывает наступающую лопасть 1 вверх. И так с каждой из лопастей несущего винта раз за оборот. В итоге это приводит к постоянной периодической вибрации всего вертолета с частотой, равной количеству оборотов несущего винта, умноженное на количество лопастей. Если начинать отклонять триммерную пластину 6 из положения 18, соответствующее 36° до положения 19, соответствующее 90° лопасти 1 несущего винта, то максимального положения она достигнет, когда лопасть 1 будет проходить отметку положения 19, соответствующее 90°. Триммерная пластина 6 отклоняется в противоположную сторону от направления действия прироста подъемной силы лопасти 1. Соответственно прирост подъемной силы с обратным знаком от действия триммерной пластины 6 компенсирует прирост подъемной силы лопасти 1 от воздействия набегающего потока. В положение 20 лопасти 1, отстоящее на 36° от положения 19 лопасти 1, триммерная пластина 6 вернется в исходное положение. Быстродействие привода при этом должно быть 0,265 секунды.
Для обоснования заявленного технического результата создана невращающаяся модель лопасти для продувки в аэродинамической трубе. Основной задачей данного исследования было показать наличие прироста подъемной силы на взвешенном отсеке лопасти от колеблющейся в потоке с определенной частотой триммерной пластины и сравнить результаты этих испытаний с результатами испытаний, проведенными ранее на такой же невращающейся модели лопасти с взвешенным отсеком, но с закрылком, установленным в задней части профиля лопасти в пределах 1/3 хорды.
Схема модели лопасти представлена на Фиг. 8. Основным элементом модели лопасти является лонжерон 15 (Фиг. 8), взвешенный отсек крепится к шестикомпонентным аэродинамическим тензовесам 16. Триммерная пластина 6 расположена вне аэродинамического профиля лопасти 1 за задней кромкой 24. Для крепления триммерной пластины к лопасти 1 используются узлы навески 7, при этом для обеспечения плавного перехода между профилем и триммерной пластиной последняя занимает часть 25 задней кромки профиля 24 на глубину порядка 20 мм. Пьезопривод 2 и передаточный механизм, включающий рычаг 4 и тяги 3 и 5, установлены во взвешенный отсек как описано выше.
Движение закрылком осуществляется пьезоэлектрическим приводом (Фиг. 9) с фиксированной частотой от 1 Гц до 15 Гц, хотя при управлении закрылком, расположенным внутри профиля в предыдущих испытаниях, стабильная работа пьезопривода была возможна только до 8 Гц, т.к. больший вес закрылка по сравнению с триммерной пластиной запирал систему привода на больших частотах и усилие на пьезоприводе после 8 Гц резко падало, что не давало возможность продолжить испытания. Исследование в аэродинамической трубе проводилось до скоростей потока 35 м/с. При нахождении в потоке трубы взвешенного отсека модели лопасти с неработающим приводом триммерной пластины на нем будет возникать подъемная сила как на обычном крыле. Если в потоке начать колебания триммерной пластиной с нужной частотой, то на аэродинамических весах взвешенного отсека возникает дополнительный прирост подъемной силы от работы триммерной пластины. На Фиг. 10 представлены графики зависимости подъемной силы от угла атаки взвешенного отсека модели. На графике, обозначенном маркерами в виде ромба, изображена зависимость подъемной силы при неработающей триммерной пластине (режим имитации профиля крыла), а на графике, обозначенном маркерами в виде квадрата, изображена зависимость подъемной силы при колеблющейся триммерной пластине. Величина прироста аэродинамической силы от работы триммерной пластины составляет на больших углах атаки взвешенного отсека около 3 кг, что в два раза больше, чем от работы закрылка, расположенного внутри профиля лопасти на тех же режимах, испытанного ранее. Прирост подъемной силы от работы триммерной пластины очевиден из этого графика и по сравнению с закрылком, расположенным внутри профиля результат в два раза лучше, а также увеличение в два раза частотного диапазона стабильной работы пьезопривода (из-за уменьшившегося веса и момента инерции триммерной пластины), что подтверждает достижение заявленного технического результата.
Располагая управляемую триммерную пластину позади задней кромки лопасти, мы не нарушаем аэродинамику профиля (как если бы происходило управление задней кромкой профиля лопасти - закрылком), также триммер можно сделать длинным и узким, что вместе с малой толщиной триммера обеспечивает малую его инерцию (оказывает сопротивление движению привода), за счет малых плеч (относительно навески и качалки) имеет малый момент инерции, что обеспечивает быстродействие всей системы привод -триммер.
Достаточно малые размеры триммера позволяют не вносить существенные изменения в силовую конструкцию лопасти и не оказывают негативного влияния на аэродинамические характеристики по сравнению с бестриммерной лопастью. При этом расчеты показывают, что установка триммерной пластины в среднюю часть лопасти (по длине) по аэродинамическому эффекту начинает превосходить чистый профиль лопасти. Таким образом, конструктивная оптимизация системы привод-триммерная пластина и улучшение аэродинамических характеристик отсека лопасти с триммерной пластиной позволят достигнуть максимального положительного эффекта от использования данного вида активного гашения вибрации. Также такую триммерную пластину с приводом можно будет конструктивно встроить в современную безлонжеронную лопасть несущего винта вертолета.
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Измерительное устройство
Способ фрезерования на станках с чпу моделей лопаток роторов газотурбинных двигателей
Система управления самолётом
Способ создания потока газа в гиперзвуковой вакуумной аэродинамической трубе и аэродинамическая труба
Аэродинамический стенд для проведения фундаментальных исследований по генерации электроэнергии мгд-методами с использованием в качестве рабочего газа высокотемпературного водорода (h)
Треугольное крыло для сверхзвуковых летательных аппаратов
Предкрылок крыла самолета и способ его обтекания
Устройство для локального подвода энергии к потоку воздуха, обтекающего объект (варианты)
Способ измерения негерметичности изделий
Лопасть несущего винта вертолёта с отклоняемой задней кромкой

