Результат интеллектуальной деятельности: СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ
Вид РИД
Изобретение
Изобретение относится к области неразрушающего ультразвукового контроля твердых тел и может использоваться при ультразвуковой дефектоскопии для обнаружения дефектов, преимущественно в рельсах железнодорожного транспорта и метрополитена, в том числе при высокоскоростном мобильном контроле.
Известные способы ультразвукового контроля, например, рельсов, используют преимущественно эхо-импульсный метод и основаны, как правило, на первичном измерении амплитуды принятого сигнала (отраженного сигнала, эхо-сигнала) от дефекта или искусственного отражателя, выполненного в объекте контроля, и последующем измерении уровня шума в бездефектном объекте контроля (образце), после чего при наборе определенной статистики делают вывод о том, что при выявлении отражающего элемента определенных размеров будет обеспечиваться необходимое соотношение сигнал/шум с заданной вероятностью, при этом для задания необходимой (браковочной) чувствительности получают принятый сигнал от определенного отражающего элемента в стандартном образце (контрольного отражателя), а признаком обнаружения дефекта является получение принятого сигнала с амплитудой, превышающей заданный уровень, являющийся браковочным (Межгосударственный стандарт ГОСТ 18576-96. «Контроль неразрушающий. Рельсы железнодорожные. Методы ультразвуковые», Издательство стандартов. М., 2001). Однако динамический диапазон видимых сигналов, находящихся ниже стандартного уровня (половины высоты экрана дефектоскопа), зрительно ограничен, а добавление усиления (повышение чувствительности) в целях обнаружения малых дефектов не дает результата, поскольку возрастает вероятность ложной браковки. Например, применительно к сплошному контролю рельсов мобильными средствами, такая традиционная методика, заключающаяся в регистрации сигналов, превысивших порог, приводит к наличию непроконтролированных участков пути или только подозрениям на дефект, что вызывает необходимость повторного контроля. Поэтому такие способы недостаточно надежны и недостаточно достоверны.
Известен, например, способ ультразвукового контроля, при котором формируют зондирующий ультразвуковой импульс, зондируют исследуемый объект, принимают эхо-сигналы от дефектов исследуемого объекта, формируют временную характеристику чувствительности с учетом ослабления этих сигналов в рабочей зоне, при этом дополнительно выделяют временную зону за пределами рабочей зоны (зоны контроля), увеличивают чувствительность усилителя в этой зоне до уровня, позволяющего регистрировать шумовые сигналы, сравнивают амплитуды принятых сигналов с заранее установленными порогами и при превышении амплитудами этих сигналов порогового уровня принимают решение о их достоверности (RU 2270998 С2, 2005). Такой способ обладает теми же недостатками.
Известен также, например, способ ультразвукового контроля, при котором размещают в заданной зоне сканирования ультразвуковой преобразователь и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию принятых сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки, выделение на ней соответствующей заданной зоне сканирования временной зоны (зоны селекции), задание критерия полезности сигнала в виде строб-импульса, уровень которого соответствует заданной чувствительности контроля, и анализ зарегистрированных в этой временной зоне принятых сигналов, перемещают ультразвуковой преобразователь в зоне сканирования и повторяют операции контроля (А.А.Марков, Д.А.Шпагин. Ультразвуковая дефектоскопия рельсов. Учебное пособие. «Образование-культура», Санкт-Петербург, 2008, с. 51-53, 88-100). В этом способе для задания критерия полезности сигнала используют строб-импульс в соответствии с заданной чувствительностью контроля, при которой может быть выявлен минимальный дефект. При этом дефектоскоп будет идентифицировать принятый сигнал как полезный, когда он попадает в выделенную временную зону и его уровень превышает уровень строб-импульса. Однако такой способ также недостаточно достоверен, что связано, в том числе, с зависимостью результатов контроля от качества акустического контакта с контролируемым объектом и влиянием субъективного фактора, например, при некорректной настройке. Например, при нарушении акустического контакта, когда наблюдается падение амплитуд как шумовых, так и полезных сигналов, вероятность пропуска дефекта значительно возрастает. Недостаток этого способа особенно проявляется при мобильном контроле рельсов. При этом потеря акустического контакта является неизбежным фактором, и существенное падение уровня отраженных сигналов приводит к пропуску дефектов в рельсе. Возможна противоположная ситуация, при которой происходит существенное возрастание амплитуд сигналов, приводящее к перебраковке. Таким образом, традиционная методика контроля, заключающаяся в принятии решения о браковке «сверху», снижает уровень достоверности результатов контроля.
Из известных способов наиболее близким к предложенному является способ ультразвукового контроля, при котором размещают в заданной зоне сканирования ультразвуковой преобразователь и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию принятых (отраженных) сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки, выделение на ней соответствующей заданной зоне сканирования временной зоны, апертуру которой выбирают из условия невхождения в нее зондирующего импульса, задание критерия полезности сигнала и анализ зарегистрированных в этой временной зоне принятых сигналов, включающий определение их амплитуд через заданный промежуток времени, перемещают ультразвуковой преобразователь в зоне сканирования и повторяют операции контроля (RU 2472143 С1, 2013). В этом способе в выделенной временной зоне определяют среднеарифметическое значение амплитуд принятых сигналов через задаваемый дефектоскопом шаг, амплитуды которых удовлетворяют условию непревышения разницы между динамическим диапазоном отображаемых на экране дефектоскопа сигналов и критерия квалификации сигнала как полезного, при этом в качестве критерия полезности сигнала выбирают превышение его амплитуды этого среднеарифметического значения не менее чем на 12 дБ. Это позволяет снизить зависимость результатов контроля от качества акустического контакта с контролируемым объектом и тем самым в определенной степени уменьшить вероятность пропуска дефектов. Однако в таком способе решение о браковке принимается по превышению уровня отраженного сигнала над уровнем шумов на определенную величину без учета динамики сигнала. Поэтому возможна ситуация, когда в зоне контроля присутствует значительное количество сигналов от конструктивных отражателей большой амплитуды, т.е. отражателей, связанных не с наличием дефектов, а с особенностями конструкции объекта контроля, либо сигналов большой амплитуды от возможного состояния поверхностей объекта контроля, являющихся дополнительными отражателями при использовании однократно и двукратно отраженных ультразвуковых колебаний. В этом случае рассчитанное по среднему арифметическому значение амплитуд сигналов будет принимать существенное значение, из-за чего возможна ситуация пропуска сигналов от дефектов, имеющих незначительную отражающую способность, а значит, незначительное превышение амплитудой уровня шума. В частности, при контроле рельсов такая ситуация будет складываться в зоне болтовых стыков и стыков, выполненных алюминотермитным способом ввиду большого количества отражателей, как то: болтовые отверстия; отверстия для приварки рельсовых соединителей; двугранные углы, образованные торцевой поверхностью рельса и различными поверхностями головки; облив сварного шва, а также при контроле рельсов, имеющих множественные поверхностные повреждения головки, либо более крупнозернистую структуру металла, либо существенные загрязнения.
Техническая проблема, решаемая изобретением, состоит в создании способа ультразвукового контроля, лишенного недостатков прототипа. Технический результат изобретения заключается в повышении достоверности контроля.
Это достигается тем, что в способе ультразвукового контроля, при котором размещают в заданной зоне сканирования ультразвуковой преобразователь и проводят операции контроля, включающие зондирование импульсами ультразвуковой частоты, регистрацию принятых сигналов посредством дефектоскопа с обеспечением их визуализации в виде амплитудно-временной развертки, выделение на ней соответствующей заданной зоне сканирования временной зоны, апертуру которой выбирают из условия невхождения в нее зондирующего импульса, задание критерия полезности сигнала и анализ зарегистрированных в этой временной зоне принятых сигналов, включающий определение их амплитуд через заданный промежуток времени, перемещают ультразвуковой преобразователь в зоне сканирования и повторяют операции контроля, в выделенной временной зоне формируют адаптивный порог на основе скорости нарастания переднего фронта принятого сигнала за заданный промежуток времени и прибавляемого к амплитуде шумового сигнала смещения, величины которых выбирают в зависимости от типа используемого ультразвукового преобразователя, а в качестве критерия полезности сигнала выбирают превышение амплитудой сигнала адаптивного порога при заданной скорости нарастания переднего фронта сигнала, при этом если приращение амплитуды за заданный промежуток времени больше заданного значения, адаптивный порог формируют из этого заданного значения, а если это приращение меньше заданного значения или равно ему, адаптивный порог считают полностью повторяющим форму сигнала и соответственно сигнал считают шумовым. Величину нарастания амплитуды сигнала могут выбирать равной значению не менее 6 дБ. Величину нарастания амплитуды сигнала могут выбирать за промежуток времени от 0,90 до 1,60 мкс в случае использования наклонных ультразвуковых преобразователей. Величину нарастания амплитуды сигнала могут выбирать за промежуток времени 0,10 до 0,85 мкс в случае использования прямых ультразвуковых преобразователей. Величину смещения могут выбирать от 6 до 14 дБ в случае использования ультразвуковых преобразователей с азимутальным разворотом с углом ввода от 55 до 60 и от 63 до 70 градусов. Величину смещения могут выбирать от 16 до 30 дБ в случае использования ультразвуковых преобразователей с углом ввода от 39 до 47 градусов, ультразвуковых преобразователей без азимутального разворота с углом ввода от 65 до 70 градусов и в случае раздельно-совмещенных прямых ультразвуковых преобразователей.
Указанный технический результат обеспечивается всей представленной в формуле изобретения совокупностью существенных признаков, каждый из которых необходим, а вместе они достаточны для решения указанной технической проблемы и для достижения указанного технического результата.
Сущностью предложенного способа является формирование адаптивного порога на основе скорости нарастания переднего фронта сигнала (градиента скорости) за заданный промежуток времени и смещения, прибавляемого к амплитуде шумового сигнала, при этом решение о браковке принимается исходя из превышения амплитудой сигнала адаптивного порога при заданной скорости нарастания переднего фронта сигнала.
В соответствии с предложенным способом выделяют в одном цикле излучения-приема ультразвукового, преимущественно пьезоэлектрического, преобразователя, установленного на контролируемый объект, временной зоны для формирования в ней адаптивного порога. Временную зону выбирают из временной апертуры исходя из условия, чтобы зондирующий импульс не входил в эту зону, поскольку вследствие значительной амплитуды он может внести существенную погрешность в результаты анализа зарегистрированных сигналов в выбранной временной зоне. Адаптивный порог формируют на основе скорости нарастания переднего фронта принятого сигнала за заданный промежуток времени и прибавляемого к амплитуде шумового сигнала смещения. Величину скорости нарастания переднего фронта и величину смещения выбирают в зависимости от типа используемого ультразвукового преобразователя. Например, наиболее часто используемые в дефектоскопии рельсов типы ультразвуковых преобразователей указаны в источнике - «Положение о системе неразрушающего контроля рельсов и эксплуатации средств рельсовой дефектоскопии в путевом хозяйстве железных дорог ОАО РЖД», ОАО РЖД, М., 2017. Величину нарастания амплитуды сигнала выбирают, например, равной значению не менее 6 дБ, установленному в качестве оптимального экспериментально на основе статистических данных. Это значение обусловлено требованиями выделения в качестве полезных сигналов, например, от конструктивных отражателей рельсов и практически всех дефектов рельсов. Поэтому, если у полученного сигнала за указанный промежуток времени нарастание амплитуды происходит на величину менее 6 дБ, сигнал можно отнести к шумовому. Величину нарастания амплитуды выбирают за промежуток времени от 0,90 до 1,60 мкс в случае использования наклонных ультразвуковых преобразователей и от 0,10 до 0,85 мкс в случае использования прямых ультразвуковых преобразователей. Указанные граничные значения промежутка времени для наклонных ультразвуковых преобразователей обусловлены нижеследующим. При выборе временного промежутка исходят из отношения длительности временной апертуры, определяемой контролируемой зоной, к количеству отсчетов, задаваемому аппаратно. Длительность же временной апертуры для наклонных ультразвуковых преобразователей связана с углом ввода ультразвукового преобразователя и его азимутального разворота, поскольку время, требуемое на прохождение одной и той же контролируемой зоны ультразвуковой волной существенно различается в зависимости от угла ввода и угла разворота. Указанную величину 0,90 мкс выбирают исходя из минимального угла ввода 39 градусов и минимального угла разворота 0 градусов, а величину 1,60 мкс - исходя из максимального угла ввода 70 градусов и максимального угла разворота 45 градусов. В случае использования прямых ультразвуковых преобразователей минимальный 0,10 мкс и максимальный 0,85 мкс промежуток времени выбирают в зависимости от различной протяженности контролируемых зон - минимальной 50 мм и максимальной 200 мм. Указанная связь значений промежутка времени, в котором выбирают величину нарастания амплитуды сигнала, с указанными параметрами установлена эмпирическим путем. Выбор граничных значений смещения обусловлен отношением амплитуд полезных сигналов и амплитуд шумовых сигналов, характерных для используемого ультразвукового преобразователя. Величину смещения выбирают, например, от 6 до 14 дБ в случае использования ультразвуковых преобразователей с азимутальным разворотом с углом ввода от 55 до 60 и от 63 до 70 градусов. Уровень акустического шума для таких ультразвуковых преобразователей высокий и обусловлен в основном особенностями технологии контроля, а именно - использованием однократно и двукратно отраженного луча, т.е. использованием дополнительных отражающих поверхностей, формирующих сигналы диффузного отражения существенной амплитуды. Уровень же амплитуд полезных сигналов, т.е. сигналов от дефектов, выявляемых такими ультразвуковыми преобразователями, достаточно низкий, в том числе в связи с низким уровнем ультразвуковой энергии, распространяющейся в сторону дефекта из-за больших потерь на диффузные отражения в результате переотражения. С учетом этого нижнюю границу диапазона величин смещения выбирают исходя из того, что при меньшей величине будет присутствовать нежелательная перебраковка, т.е. выделение сигналов, не связанных с наличием дефектов. Верхнюю границу этого диапазона выбирают из того, что при большей величине будет пропуск дефектов. Величину смещения выбирают, например, от 16 до 30 дБ в случае использования ультразвуковых преобразователей с углом ввода от 39 до 47 градусов, ультразвуковых преобразователей без азимутального поворота с углом ввода от 65 до 70 градусов и в случае использования раздельно-совмещенных прямых ультразвуковых преобразователей. Уровень акустического шума для таких типов ультразвуковых преобразователей достаточно низкий и обусловлен преимущественно рассеянием на границах зерен металла контролируемого объекта. Уровень же амплитуд полезных сигналов для таких ультразвуковых преобразователей достаточно высокий в связи с высоким уровнем ультразвуковой энергии, отраженной от дефектов, что обусловлено оптимальными условиями отражения. С учетом этого нижнюю границу диапазона величин смещения также выбирают исходя из того, что при меньшей величине для таких ультразвуковых преобразователей будет присутствовать нежелательная перебраковка, а верхнюю - из того, что при большей величине возможен пропуск дефектов. В качестве критерия полезности сигнала при анализе выбирают превышение амплитудой сигнала адаптивного порога при заданной скорости нарастания переднего фронта сигнала, при этом, если приращение амплитуды за заданный промежуток времени больше заданного значения, адаптивный порог формируют из этого заданного значения, а если это приращение меньше заданного значения или равно ему, адаптивный порог считают полностью повторяющим форму сигнала и соответственно сигнал считают шумовым. Повышение объективности контроля обусловлено тем, что при контроле учитывается динамика поведения принимаемого сигнала и обеспечивается оптимальная информативность о шумовом сигнале.
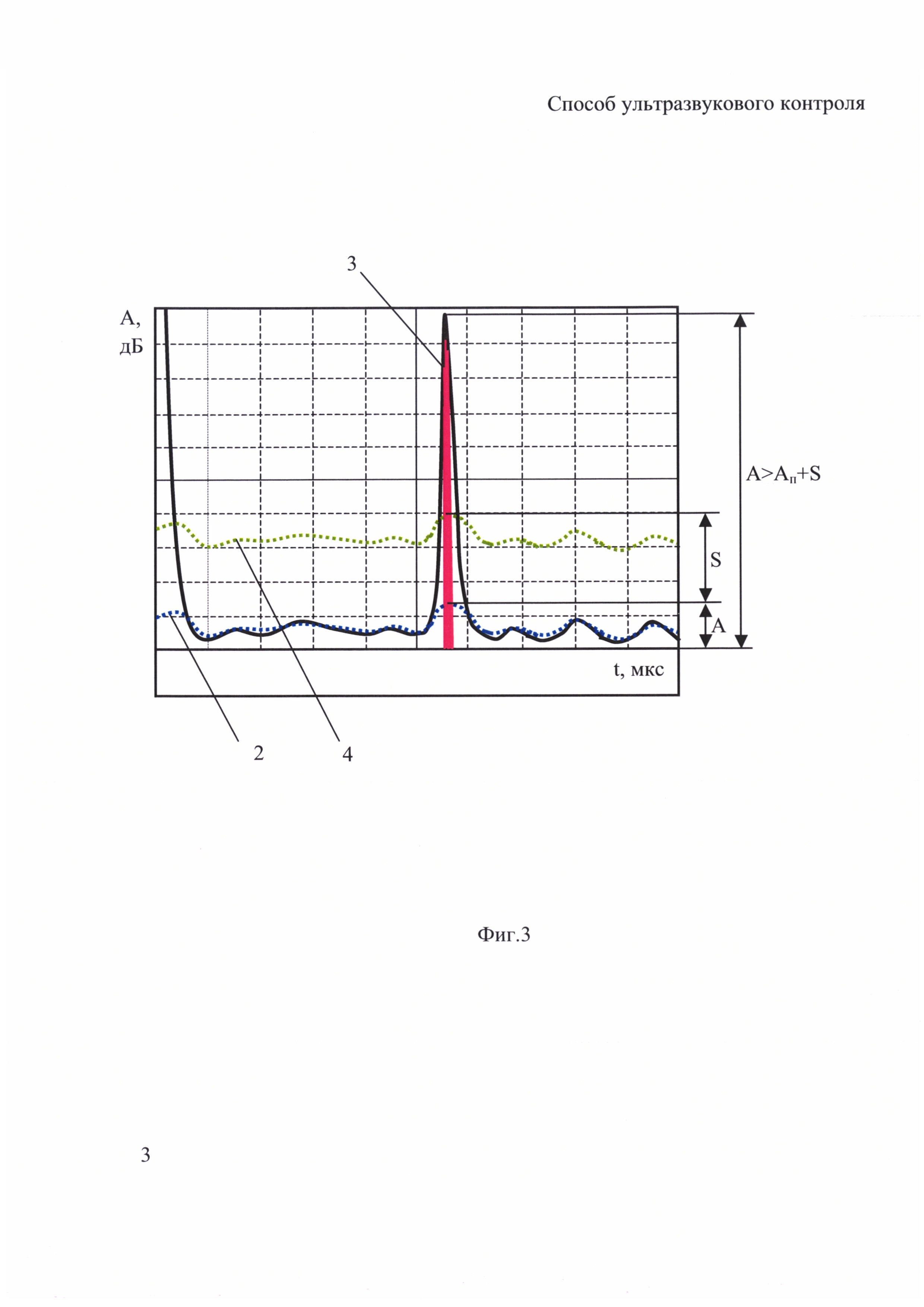
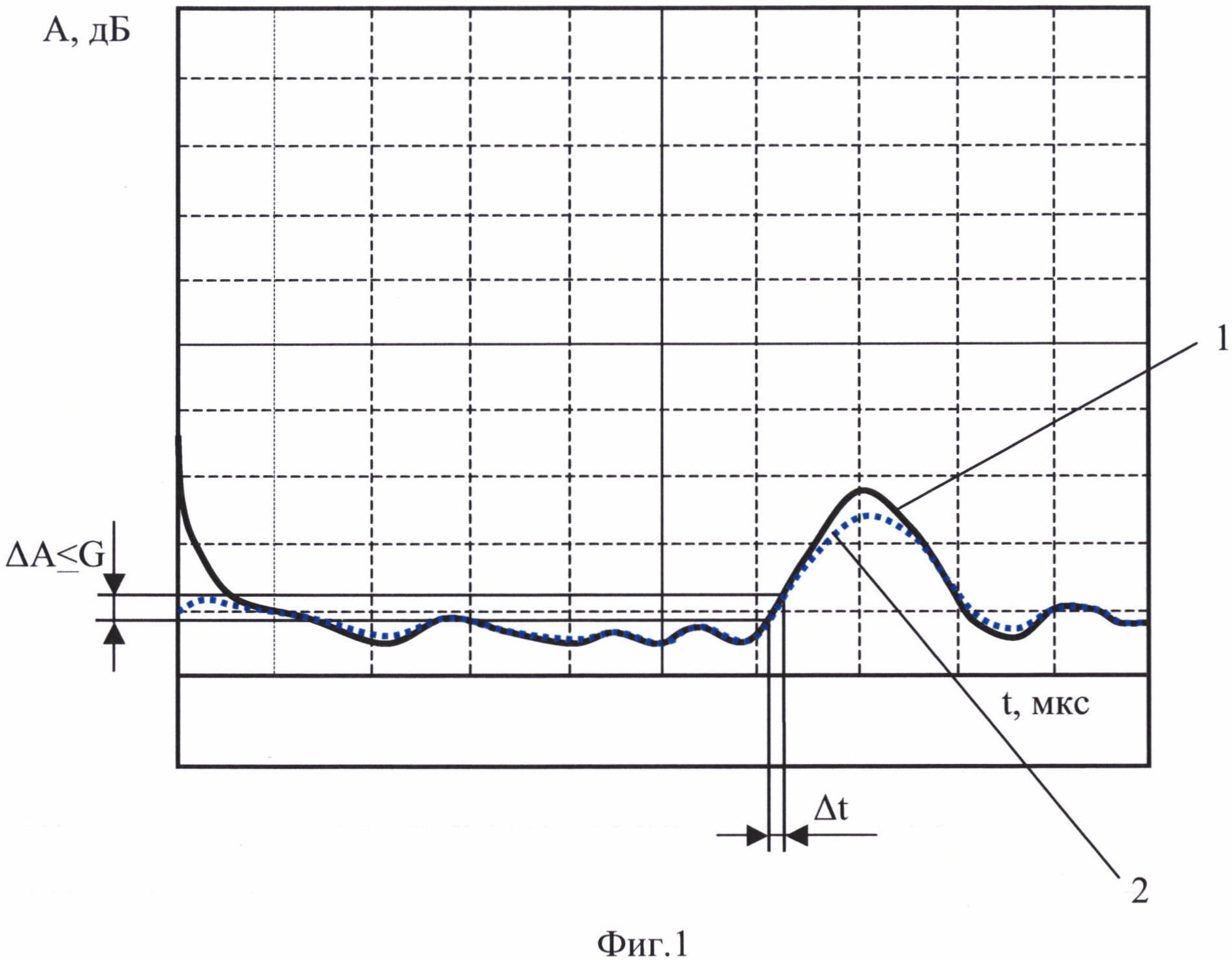
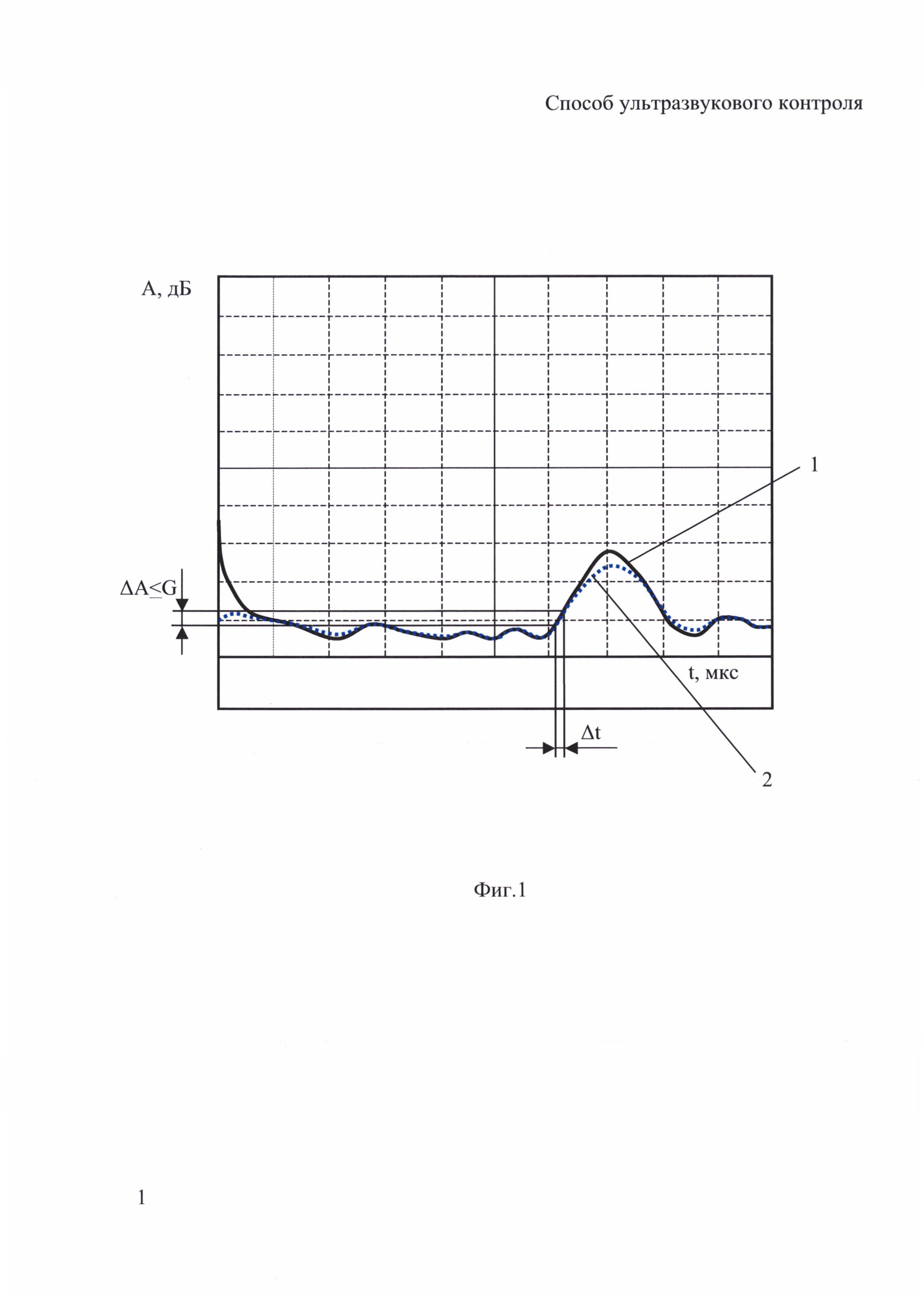
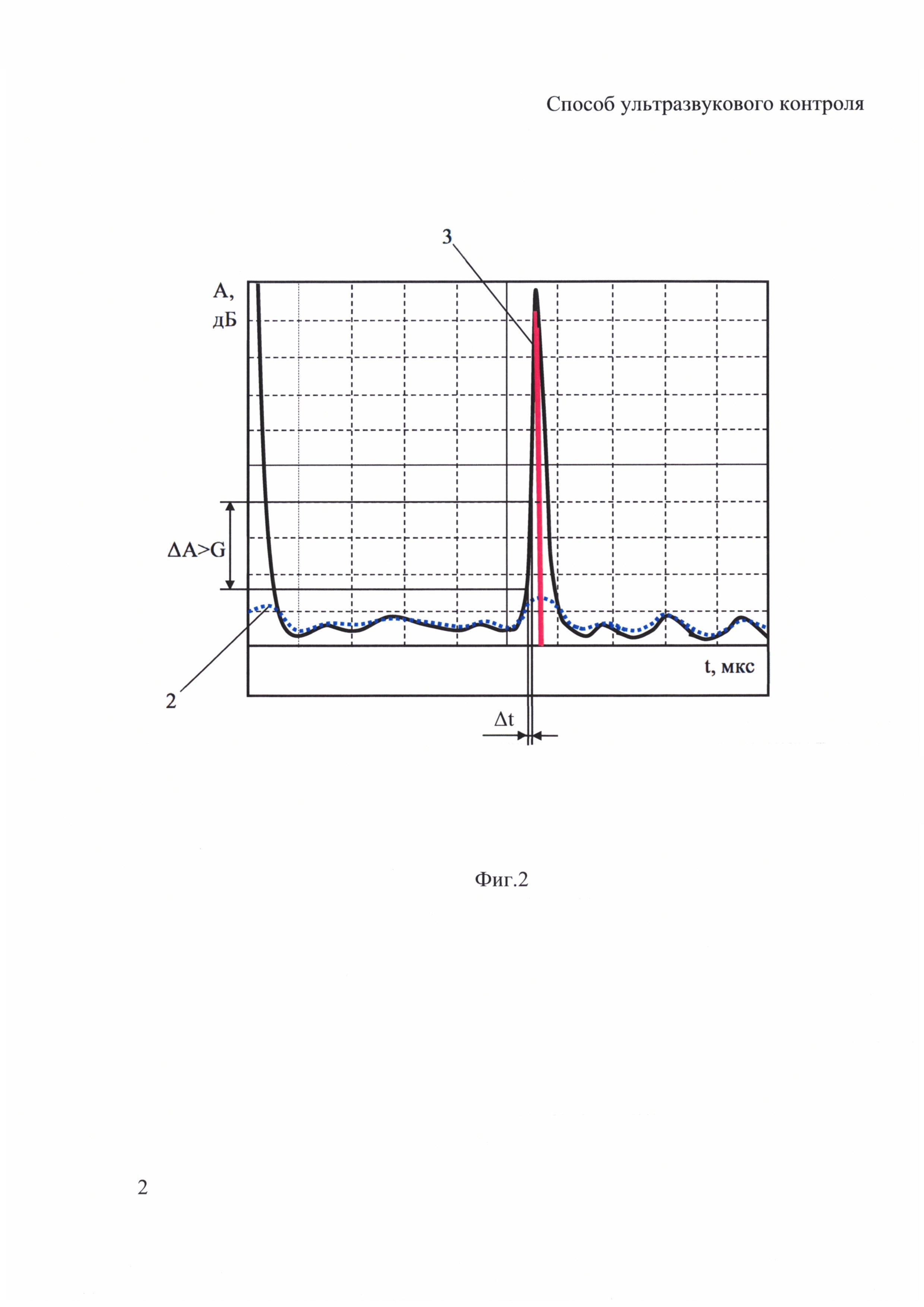
На фиг. 1 - фиг. 3 показаны амплитудно-временные развертки принятых сигналов, иллюстрирующие особенности предложенного способа, со следующими обозначениями: А - амплитуда сигналов, t - время, ΔА - приращение (изменение) амплитуды, Δt - заданный промежуток времени, G -заданное значение приращения амплитуды, S - смещение, прибавляемое к амплитуде шумового сигнала, Ап - адаптивный порог; 1 - сигнал, не удовлетворяющий критерию скорости нарастания переднего фронта, 2 -форма адаптивного порога при ΔA≤G или ΔA>G, 3 - полезный сигнал, 4 - форма адаптивного порога, сформированного исходя из заданного значения G и смещения S. Случай, когда адаптивный порог 1 повторяет форму шумового сигнала 2, отображен на фиг. 1. При этом приращение амплитуды ΔА в заданный промежуток времени Δt меньше заданного значения приращения амплитуды G (или равно ему). Амплитудно-временная развертка принятых сигналов на фиг. 2 иллюстрирует наличие полезного сигнала 3, удовлетворяющего условию скорости нарастания его переднего фронта, при этом приращение амплитуды ΔА в заданный промежуток времени Δt больше заданной величины G. На фиг. 3 отражено наличие полезного сигнала 3, удовлетворяющего условию превышения амплитудой сигнала А уровня, равного сумме уровня адаптивного порога Ап в данный момент времени t и величины смещения S. При этом сигнал считается удовлетворяющим этому условию, а адаптивный порог 4 формируется исходя из заданного значения G и смещения S.
Пример реализации. Для реализации предложенного способа использован снабженный соответствующим программным обеспечением дефектоскоп в составе скоростного вагона-дефектоскопа «СПРИНТЕР» (разработка АО «Фирма ТВЕМА», г. Москва). Испытания проводились на специализированном испытательном участке, а также действующем участке пути Москва - Нижний Новгород. До проезда в каждом канале дефектоскопа (для каждого ультразвукового преобразователя) устанавливались величины приращения скорости переднего фронта сигнала (величина G за промежуток времени Δt) и смещения S исходя из особенностей выявления дефектов рельсов. Искательные системы с ультразвуковыми преобразователями посредством пневматического механизма прижимались к поверхности катания рельса и приводилась в действие система подачи контактной жидкости. При движении вагона происходило сканирование рельса ультразвуковыми преобразователями, которые каждые 5 мм пути по сигналу контроллера излучали ультразвуковые волны в рельс. В процессе сканирования производился прием сигналов, отраженных от дефектов и от конструктивных отражателей рельса. В каждом цикле излучения-приема автоматически происходило формирование адаптивного порога в выделенной временной зоне по каждому каналу с учетом скорости нарастания переднего фронта сигнала. Сигналы, полученные в этой зоне, и имеющие амплитуду А, величина которой превышает уровень адаптивного порога Ап на разницу, заданную при подготовке к проезду для каждого канала, индицировалась записью на амплитудно-временной развертке. В результате анализа проезда на скорости до 140 км/час не зафиксированы случаи перебраковки, не зафиксировано также участков с потерей информации из-за локального снижения качества акустического контакта.
Способ ультразвукового контроля, реализуемый в соответствии с изобретением, обеспечивает повышение достоверности контроля по сравнению с другими аналогичными способами. Он может использоваться с высокой эксплуатационной эффективностью для ультразвуковой дефектоскопии различных объектов, в том числе рельсов. Особенно эффективно использование этого способа ультразвукового контроля в мобильных диагностических средствах железнодорожной инфраструктуры, позволяя надежно выявлять дефекты рельсов при высокой скорости передвижения таких диагностических средств. Это позволяет в свою очередь проводить диагностику рельсового пути, не прерывая штатные грузовые и пассажирские перевозки, включив мобильное диагностического средство, выполненное, например, в виде вагона-дефектоскопа, в соответствующий состав.
Дефектоскоп для контроля рельсов
Способ ультразвукового контроля
Комплекс автоматизированного учета вагонооборота
Демпфирующий резец с управляемой жесткостью
Следяще-стабилизирующее устройство скоростного вагона-дефектоскопа
Устройство для удаления мочи из гидрокомбинезона
Путеизмерительная следящая система
Дефектоскоп совмещенного бесконтактного магнитного и ультразвукового контроля рельсового пути
Способ получения перфторэтилизопропилкетона
Универсальный демпфирующий резец с управляемой жесткостью
Способ очистки перфторэтилизопропилкетона

