Результат интеллектуальной деятельности: СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС) сопровождения, работающих по целеуказанию.
Одним из наиболее эффективных средств получения радиолокационной информации в настоящее время являются многофункциональные РЛС (МРЛС) с активными фазированными антенными решетками с двумерным электронным сканированием, которые могут осуществлять сопровождение целей с высокоточным измерением их координат.
Основной характеристикой МРЛС сопровождения является ее производительность, которая определяется как количество целей, сопровождаемых за один обзор с заданным качеством трассовой информации, и зависит от времени, затрачиваемого МРЛС сопровождения на одну цель. Для увеличения производительности РЛС в режиме сопровождения может быть использован способ, при котором время облучения каждой цели ограничивается величиной, необходимой для ее обнаружения и измерения параметров с заданной точностью. При таком способе происходит перераспределение времени, затрачиваемого на обслуживание целей с большой эффективной площадью рассеяния (ЭПР) и (или) находящихся на небольшой дальности, и целей с малыми ЭПР и (или) находящихся на больших дальностях, что приводит к уменьшению среднего времени облучения и, соответственно, к увеличению производительности МРЛС.
Известны РЛС, работающие в режиме сопровождения [1, 2, 3, 4]. Общим недостатком этих аналогов является большие временные затраты на обнаружение и сопровождение, вызванные задержкой в обработке отраженных эхосигналов при реализации алгоритмов первичной обработки информации. Наиболее близким аналогом (прототипом), по техническому исполнению является РЛС [4], которая содержит антенное устройство в составе основной и компенсационной антенн, приемопередающее устройство, включающее приемники основного и компенсационного каналов, схему управления, устройство первичной обработки (УПО) в составе устройства защиты от помех и оптимального фильтра, устройства накопления сигнала, порогового устройства, устройства подавления сигналов, принятых боковыми лепестками диаграммы направленности, и устройства измерения координат, а также устройство вторичной обработки, выход которого является выходом РЛС.
Прототип работает следующим образом. По целеуказанию в направлении на цель излучается пачка импульсов. Отраженные от цели эхосигналы через антенное устройство поступают в приемники приемопередающего устройства, где усиливаются, селектируются по частоте и преобразуются в цифровой код, после чего поступают на вход устройства первичной обработки информации, где в каждом такте зондирования, реализуется внутрипериодная обработка, включающая в себя защиту от активный шумовых помех, защиту от несинхронный импульсных помех и оптимальную фильтрацию эхо-сигнала. После этого производится накопление отраженных от цели сигналов. Далее накопленный сигнал подается на пороговое устройство, где реализуется сравнение с порогом, при котором обеспечивается обнаружение и измерение координат цели с заданной точностью. По достижении накопленного отношения сигнал-шум требуемой величины, сигнал с выхода порогового устройства подается на устройство подавления боковых лепестков диаграммы направленности, устройство измерения координат и далее на устройство вторичной обработки информации. После получения информации на выходе устройства вторичной обработки реализуется облучение следующей цели.
Однако у прототипа есть существенный недостаток. Так, для обработки отраженных от целей сигналов на современных специализированных вычислительных средствах необходимо затратить существенный временной ресурс, требуемый для проведения математических операций при реализации алгоритмов первичной обработки, что приводит к временной задержке получения информации на выходе РЛС. Данная временная задержка приводит к тому, что результат первичной обработки отраженных от цели импульсных сигналов может быть оценен только через определенный промежуток времени после того, как реально было достигнуто необходимое отношение сигнал-шум. Т.е. каждая цель независимо от ее дальности и ЭПР будет облучаться столько времени, сколько необходимо для ее обнаружения и измерения координат с заданной точностью плюс время, равное задержке на обработку, что приводит к существенному снижению производительности РЛС сопровождения. Вместе с тем возможности по уменьшению задержки на обработку информации весьма ограничены и определяются производительностью применяемых вычислительных средств. Так, даже при самой эффективной конвейерной организации программируемого процессора сигналов минимальная задержка на обработку составляет три такта работы РЛС [5]: один такт - прием информации от аналого-цифрового преобразователя приемопередающего устройства, второй такт - реализация алгоритмов обработки и третий такт - выдача результатов обработки. Типовая величина периода зондирования для РЛС сопровождения средних и больших высот равна величине порядка 5 мс, а следовательно, минимальная задержка на обработку будет составлять 15 мс, что при большом количестве целей будет приводить к значительным потерям временного ресурса РЛС сопровождения.
Техническим результатом предлагаемого изобретения является повышение производительности РЛС сопровождения за счет снижения временных потерь, вызванных задержкой в обработке информации.
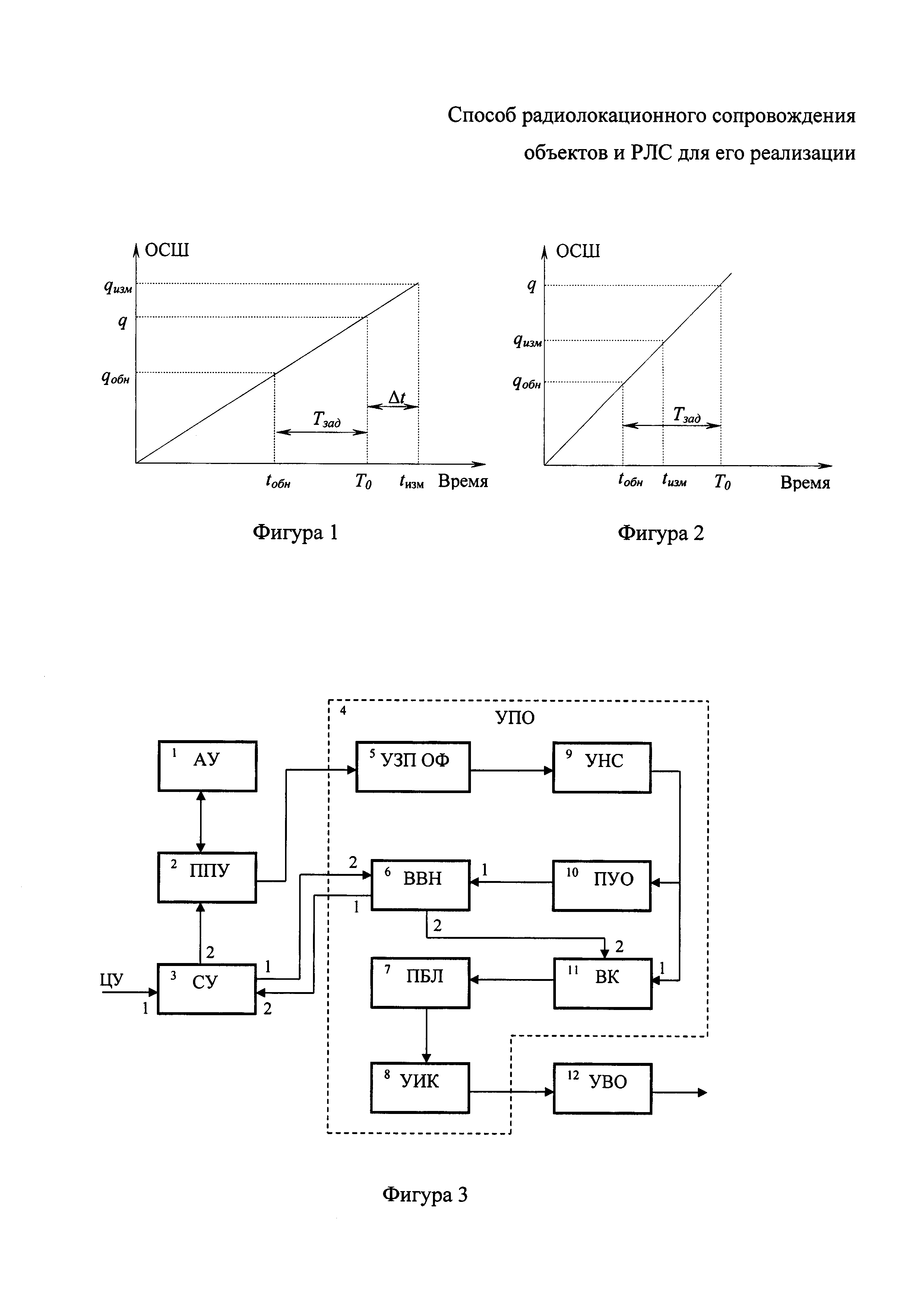
Указанный технический результат достигается за счет того, что при первичной обработке информации используют два порога: первый порог - порог обнаружения, при превышении которого принимается решение об обнаружении эхосигнала цели, второй порог - назовем его порогом измерения (больше, чем порог обнаружения), при достижении которого обеспечивается необходимая точность измерения координат цели. Алгоритм работы двухпороговой схемы поясняется на фигурах 1 и 2, где условно изображен процесс увеличения отношения сигнал-шум (ОСШ) в процессе накопления отраженного сигнала в подсистеме первичной обработки информации. Первый случай (фигура 1) соответствует малому значению ЭПР цели или большой дальности, а второй (фигура 2) - большой ЭПР или малой дальности до цели.
На выходе системы обработки с задержкой фиксируется момент времени (Т0) превышения первого порога, равного порогу обнаружения (qобн). Зная величину временной задержки (Тзад) в системе первичной обработки информации и время начала облучения цели, можно рассчитать, сколько времени (tобн) реально было затрачено для достижений отношением сигнал-шум порога обнаружения. Затем, зная соотношение между порогом обнаружения (qобн) и порогом измерения (qизм), можно также рассчитать, сколько времени необходимо дополнительно облучать цель (Δt=tизм - Т0), чтобы уровень накопленного сигнала превысил порог измерения. Если оцененное время положительно (т.е. сигнал необходимо еще докопить, чтобы результат накопления достиг порога измерения), то реализуется накопление необходимого дополнительного количества импульсов, после чего облучение принудительно останавливается (фигура 1). Далее реализуется облучение следующей цели, не дожидаясь результата на выходе системы обработки. В этом случае потерь в производительности из-за задержки на обработку не будет. Если же оцениваемое время (Δt) меньше или равно нулю, значит, цель облучалась больше времени, чем это требуется для измерения ее параметров с требуемой точностью, и необходимое отношение сигнал-шум уже достигнуто, то дальнейшее облучение данной цели прекращается (фигура 2). В этом случае будут иметь место дополнительные временные затраты, которые, в отличие от прототипа, будут существенно меньше, а их величина будет зависеть от конкретного значения дальности до цели и ее ЭПР.
Таким образом, предлагаемый способ повышения производительности РЛС сопровождения основан на облучении цели, приеме отраженного сигнала, первичной обработке этого сигнала с его накоплением и вторичной обработке и отличается от прототипа тем, что при первичной обработке после превышения накопленным сигналом порога обнаружения оценивают время, необходимое для превышения им порога измерения, требуемого для измерения координат цели с заданной точностью, и либо излучают в течение этого времени сигнал, после чего принудительно прекращают облучение заданной цели и переходят к облучению следующей цели, не дожидаясь результата на выходе подсистемы первичной обработки информации, либо прекращают дальнейшее облучение цели.
Реализация указанного способа возможна с помощью устройства (см. фигуру 3), которое содержит: антенное устройство АУ 1 в составе основной и компенсационной антенн, приемопередающее устройство ППУ 2, вход-выход которого соединен с входом-выходом АУ 1, схему управления СУ 3, второй выход которой соединен с входом ППУ 2, а первый вход - с источником сигнала целеуказания ЦУ, устройство первичной обработки УПО 4 в составе устройства защиты от помех и оптимального фильтра УЗП ОФ 5, устройства накопления сигнала УНС 9, порогового устройства обнаружения ПУО 10, устройства подавления сигналов, принятых боковыми лепестками диаграммы направленности основной антенны ПБЛ 7 и устройства измерения координат УИК 8, а также устройство вторичной обработки УВО 12, причем выход ППУ 2 соединен последовательно с УЗП ОФ 5, УНС 9 и ПУО 10, а выход ПБЛ 7 соединен последовательно с УИК 8 и УВО 12, выход которого является выходом РЛС. Кроме того, в отличие от прототипа, в устройство введены вычислитель времени накопления сигнала ВВН 6, первый и второй входы которого соединены с выходом ПУО 10 и первым выходом СУ 3, соответственно, первый выход соединен с вторым входом СУ 3, а также выходной ключ ВК 11, второй вход которого соединен с вторым выходом ВВН 6, первый вход - с выходом УНС 9, а выход - с входом ПБЛ 7.
Эта РЛС может работать как на фиксированной частоте, так и с использованием многочастотного зондирующего сигнала. При этом устройство накопления сигналов УНС 9 в общем случае может состоять из некогерентного накопителя или набора когерентных накопителей, а также из их возможных комбинаций. Кроме этого при использовании многочастотного сигнала зондирования УНС 9 может включать в себя устройства распределения сигнала и оценки мощности с целью реализации алгоритмов поиска наилучшей частоты работы с точки зрения максимального уровня отраженного от цели сигнала. Приемное и передающее устройство в общем случае могут быть прямого усиления или использовать построение по супергетеродинной схеме.
РЛС сопровождения с патентуемым способом работает следующим образом.
По целеуказанию от источника ЦУ луч РЛС сопровождения устанавливается в заданное угловое направление на выбранную цель и реализуется последовательное облучение цели импульсными сигналами. Для этого схема управления СУ 3 по информации от источника ЦУ определяет параметры амплитудно-фазового распределения для АУ 1, формирует импульсы синхронизации, определяющие начало каждого такта зондирования, и передает их на передающую часть ППУ 2, в котором реализуется формирование сигналов, излучаемых при помощи АУ 1 в пространство. Одновременно с этим с первого выхода СУ 3 на вход ВВН 6 поступает информация о времени начала облучения цели. Отраженные от цели эхосигналы через основную и компенсационную антенны АУ 1 поступают в приемники ППУ 2. В приемниках ППУ 2 отраженные эхосигналы усиливаются, селектируются по частоте и преобразуются в цифровой код, после чего поступают на вход УЗП ОФ 5 устройства первичной обработки информации УПО 4. В каждом такте зондирования в УЗП ОФ 5 реализуется внутрипериодная обработка, включающая в себя защиту от активных шумовых помех, защиту от несинхронных импульсных помех и оптимальную фильтрацию эхо-сигнала.
Далее устройство УНС 9 производит межпериодное накопление сигналов, после чего накопленный сигнал подается на пороговое устройство обнаружения ПУО 10, где реализуется сравнение накопленного сигнала с порогом обнаружения. Результат превышения порога подается на первый вход вычислителя времени накопления ВВН 6. Устройство ВВН 6 фиксирует момент времени превышения накопленным сигналом порога обнаружения, после чего, имея информацию о временной задержке в устройстве УПО 4, а также полученную от СУ 3 информацию о времени начала облучения цели, рассчитывает, сколько времени реально было затрачено для достижения накопленным сигналом порога обнаружения. Далее устройство ВВН 6, имея информацию о соотношении между порогом обнаружения и порогом измерения, рассчитывает, сколько времени необходимо дополнительно облучать цель, чтобы уровень накопленного сигнала превысил порог измерения. Если оцененное время положительно, то устройство ВВН 6 передает информацию о дополнительном времени облучения на второй вход СУ 3.
В этом случае СУ 3 рассчитывает количество импульсов, которое необходимо дополнительно излучить, и при помощи синхросигналов обеспечивает их формирование в ППУ2, после чего по команде от СУ 3 на ППУ 2 облучение прекращается, и информация об окончании облучения цели передается с первого выхода СУ 3 на второй вход ВВН 6 и далее с второго выхода ВВН 6 на второй вход ВК 11. При поступлении информации об окончании облучения выходной ключ ВК 11 передает накопленный сигнал с выхода УНС 9 на вход ПБЛ 7 и далее - на УИК 8, в которых, соответственно, реализуются подавление сигналов, принятых по боковым лепесткам диаграммы направленности, и измерение координат сопровождаемого объекта. Далее информация об измеренных параметрах цели поступает на УВО 12, где осуществляется вторичная обработка информации, выдаваемая на конечного потребителя.
В случае, если оцененное время дополнительного облучения цели меньше или равно нулю (т.е. накопленный сигнал реально превысил и порог обнаружения и порог измерения), дальнейшее облучение данной цели прекращается, для чего с первого выхода ВВН 6 на второй вход СУ 3 и далее с второго выхода СУ3 на вход ППУ 2 поступает управляющая команда. Одновременно с этим по команде, поступающей со второго выхода ВВН 6 на второй вход ВК 11, выходной ключ пропускает накопленный сигнал с выхода УНС 9 на устройства ПБЛ 7 и УИК 8, где по накопленной пачке импульсов реализуются соответствующие алгоритмы первичной обработки, и полученная информация выдается на устройство вторичной обработки УВО 12 и далее на конечного потребителя.
Таким образом, введение в устройство-прототип, содержащий АУ, ППУ, СУ, УПО, УВО дополнительно ВВН и ВК с соответствующими связями, позволило создать устройство, реализующее способ облучения целей, использование которого в РЛС сопровождения позволяет повысить ее производительность, что достигается за счет снижения временных потерь, вызванных временной задержкой в обработке информации.
Список литературы
1. Способ радиолокационного обнаружения и сопровождения объектов, патент РФ №2137152, опубл. 10.09.1999.
2. Способ радиолокационного обнаружения и сопровождения объектов и РЛС для его реализации, патент РФ №2149421, опубл. 20.05.2000.
3. Способ радиолокационного обнаружения и сопровождения объектов, комплекс РЛС для реализации способа, патент РФ №2150716, опубл. 10.06.2000.
4. Радиолокационная станция сопровождения с многочастотным зондирующим сигналом, патент РФ №149404, опубл. 27.12.2014.
5. Д. Бобров, А. Доброжанский, Г. Зайцев, Ю. Маликов, И. Цыбин. Цифровая обработка сигналов в многофункциональных РЛС. Журнал «Цифровая Обработка Сигналов», 2002 г., №2.
Антенное переключающее устройство (апу)
Способ формирования и обработки радиолокационных модифицированных фазоманипулированных сигналов
Способ улучшения характеристик нелинейного радиолокатора
Способ сетевой обработки информации в автоматизированной системе обработки и обмена радиолокационной информацией
Устройство первичной обработки радиолокационной информации
Способ закалки тонкостенных длинномерных деталей из стали 12х2нвфа в управляемом потоке воздуха
Способ построения компактных делителей мощности свч сигналов
Мобильный радиолокационный комплекс для обнаружения средств поражения и противодействия этим средствам
Способ и устройство определения модуля скорости баллистического объекта с использованием выборки квадратов дальности
Полосно-заграждающий фильтр на несимметричной полосковой линии с использованием элементов фильтра нижних частот
Многодиапазонный радиолокационный комплекс
Устройство первичной обработки сигналов радиолокационной станции, использующей две последовательности зондирующих импульсов
Амплитудный одноканальный многочастотный пеленгатор шумовых активных помех
Мобильная антенная установка

