Результат интеллектуальной деятельности: Устройство преобразования углового перемещения антенны РЛС
Вид РИД
Изобретение
Изобретение относится к области радиолокационной техники и может быть использовано в радиолокационных станциях, например в мобильных РЛС для обнаружения, измерения координат, распознавания и сопровождения целей.
Известна система преобразования углового перемещения антенны РЛС (патент №2248092 класс МПК7: Н03М 1/12, H01Q 3/02), содержащая блок датчиков, кинематически связанный с валом антенны, преобразователь угловой информации, датчик кода, сумматор, блок контроля, генератор тактовых импульсов, схему задержки, двоичный счетчик импульсов, два статических регистра, линейку цифровых компараторов и оперативное запоминающее устройство. Техническим результатом известной системы является повышение точности преобразования углового перемещения антенны РЛС за счет исключения функциональной составляющей ошибки преобразования, вызванной погрешностями кинематической цепи.
Недостатками указанной системы являются сложность и низкая надежность из-за использования большого количества аналоговых и цифровых дополнительных устройств, а также невысокая точность и ограниченные функциональные возможности. Система работает в режиме кругового обзора с постоянной скоростью и не может быть использована в динамических режимах работы РЛС, таких как наведение, секторный обзор, сопровождение, а также при малых перемещениях, что ограничивает ее функциональные возможности.
Изменение скорости кругового обзора в пределах оборота, связанное, например, с механическими затираниями силового редуктора опорно-поворотного устройства, изменением ветровой нагрузки антенн и т.д., приводит к тому, что текущий код изменяется нелинейно, и линейная аппроксимация приводит к дополнительной погрешности метода, даже при нулевой кинематической погрешности информационной передачи.
Известна система преобразования углового перемещения антенны РЛС (патент №2305895 класс МПК7: Н03М 1/06), содержащая последовательно соединенные первый блок датчиков, кинематически связанный с валом антенны через зубчатое колесо, закрепленное на ее валу, первый преобразователь угловой информации и первый сумматор, а также датчик кода, последовательно соединенные второй блок датчиков, кинематически связанный через зубчатое колесо с валом антенны и размещенный на диаметрально противоположной по отношению к первому блоку датчиков стороне зубчатого колеса, второй преобразователь угловой информации, выход которого соединен со вторым входом первого сумматора, а также последовательно соединенные делитель кода на два и второй сумматор, причем выход первого сумматора соединен с входом делителя кода на два, а выход датчика кода - со вторым входом второго сумматора, выход которого является выходом системы.
Техническим результатом известной системы является повышение точности преобразования углового перемещения антенны РЛС за счет исключения функциональной составляющей ошибки преобразования, вызванной погрешностями кинематической цепи.
Недостатками известной системы являются конструктивные сложности и повышенная себестоимость при использовании двух датчиков, сложность и низкая надежность из-за дополнительных устройств, а также невысокая точность и ограниченные функциональные возможности.
Кинематическая погрешность проявляется в результате взаимодействия пары зубчатых колес: вала антенны и оси датчика. В известном устройстве зубчатое колесо вала антенны взаимодействует с двумя разными зубчатыми колесами осей датчиков, то есть имеются две пары с разными кинематическими ошибками.
В описании известной системы указано, что ошибка кинематической цепи зависит, главным образом, от ошибки зубчатого колеса на валу антенны и имеет периодический характер, близкий к синусоидальному. Такая ситуация возможна, например, когда в качестве ведущего используется зубчатое колесо или какая-либо ступень силовой передачи. Однако силовые передачи характеризуются большими люфтами и погрешностями изготовления и не могут обеспечить достаточную точность измерения текущего углового положения. Для этого используются безлюфтовые информационные передачи от вала к оси датчика, позволяющие получить точность, соответствующую 10-12 разрядам углового кода и выше. Естественно, что зубчатые колеса таких передач выполняются с высокой степенью точности и по идентичной технологии и, следовательно, вносят соизмеримый вклад в кинематическую погрешность информационной передачи. Наличие двух различных кинематических пар приводит к тому, что для разных датчиков указанная погрешность будет разной.
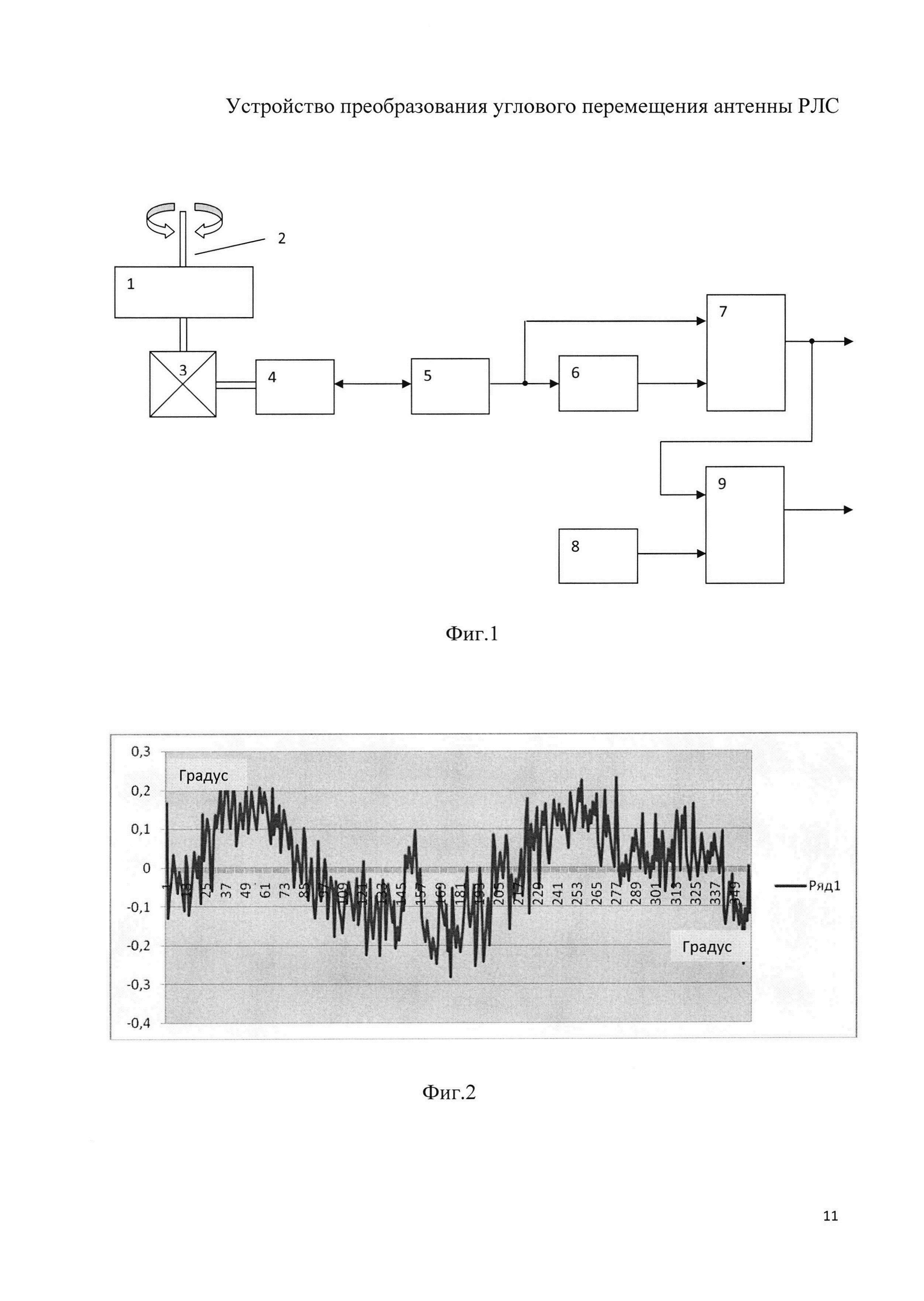
Передаточное отношение 1:1 соответствует техническим данным многих современных, например, оптических датчиков. Однако по конструктивным соображениям особенно часто в азимутальном приводе для обеспечения указанного передаточного отношения приходится использовать несколько ступеней, соединенных по схеме мультипликатор-редуктор. Это приводит к отклонению от синусоидальности и еще большему различию кинематических погрешностей информационных передач двух датчиков. Пример кинематической погрешности датчика с двухступенчатым редуктором такого типа показан на фиг. 2. Данные сняты в пределах одного оборота вала антенны через 1° при помощи 12-разрядного датчика углового положения. Выбросы амплитудой до ±0,1° представляют собой цифровой шум датчика. Из фиг. 2 видно, что период синусоидальной зависимости (без учета цифрового шума) значительно отличается от 2π.
Таким образом, невозможно в полной мере обеспечить компенсацию кинематической погрешности информационной передачи за счет подключении двух датчиков к диаметрально противоположным сторонам зубчатого колеса вала антенны, что снижает точность и ограничивает функциональные возможности применения известной системы.
Основным техническим результатом предлагаемого изобретения является упрощение, снижение себестоимости, повышение надежности, повышение точности и расширение функциональных возможностей.
Технический результат достигается тем, что устройство преобразования углового перемещения антенны РЛС включает датчик углового положения, редуктор, опорно-поворотное устройство, механически связанное с валом антенны, устройство опроса, датчик кода привязки к северу, постоянное запоминающее устройство, первое и второе вычислительные устройства, при этом ось датчика углового положения кинематически через редуктор связана с валом антенны, а выход подключен к входу устройства опроса, выход которого подсоединен к адресному входу постоянного запоминающего устройства и первому входу первого вычислительного устройства, второй вход которого подключен к выходу постоянного запоминающего устройства, а выход является выходом кода углового положения и также подключен к первому входу второго вычислительного устройства, у которого ко второму входу подключен выход датчика кода привязки к северу, а выход является выходом кода углового положения с привязкой к северу.
Введение постоянного запоминающего устройства и вычислительного устройства позволяет определить и записать значения ошибок, вызванных погрешностями кинематической цепи в зависимости от углового положения антенной колонки, а в процессе работы РЛС обеспечить компенсацию этой кинематической погрешности информационной передачи, что значительно повышает точность предлагаемого устройства.
При этом РЛС может функционировать во всех, в том числе и в динамических, режимах с любыми, в том числе многоступенчатыми, редукторами, что значительно расширяет функциональные возможности применения предлагаемого устройства.
В предлагаемом устройстве используется один датчик углового положения; кроме того, постоянное запоминающее устройство ПЗУ и вычислительное устройство ВУ могут быть выполнены на уже имеющейся в РЛС аппаратуре, а именно на базе внутренней памяти и арифметико-логического устройства (АЛУ) микроконтроллера блока управления приводом антенны, что по сравнению с известными устройствами значительно сокращает количество аппаратуры и соответственно снижает себестоимость и повышает надежность устройства. Второе вычислительное устройство может быть выполнено, например, на базе персонального компьютера автоматизированного рабочего места оператора.
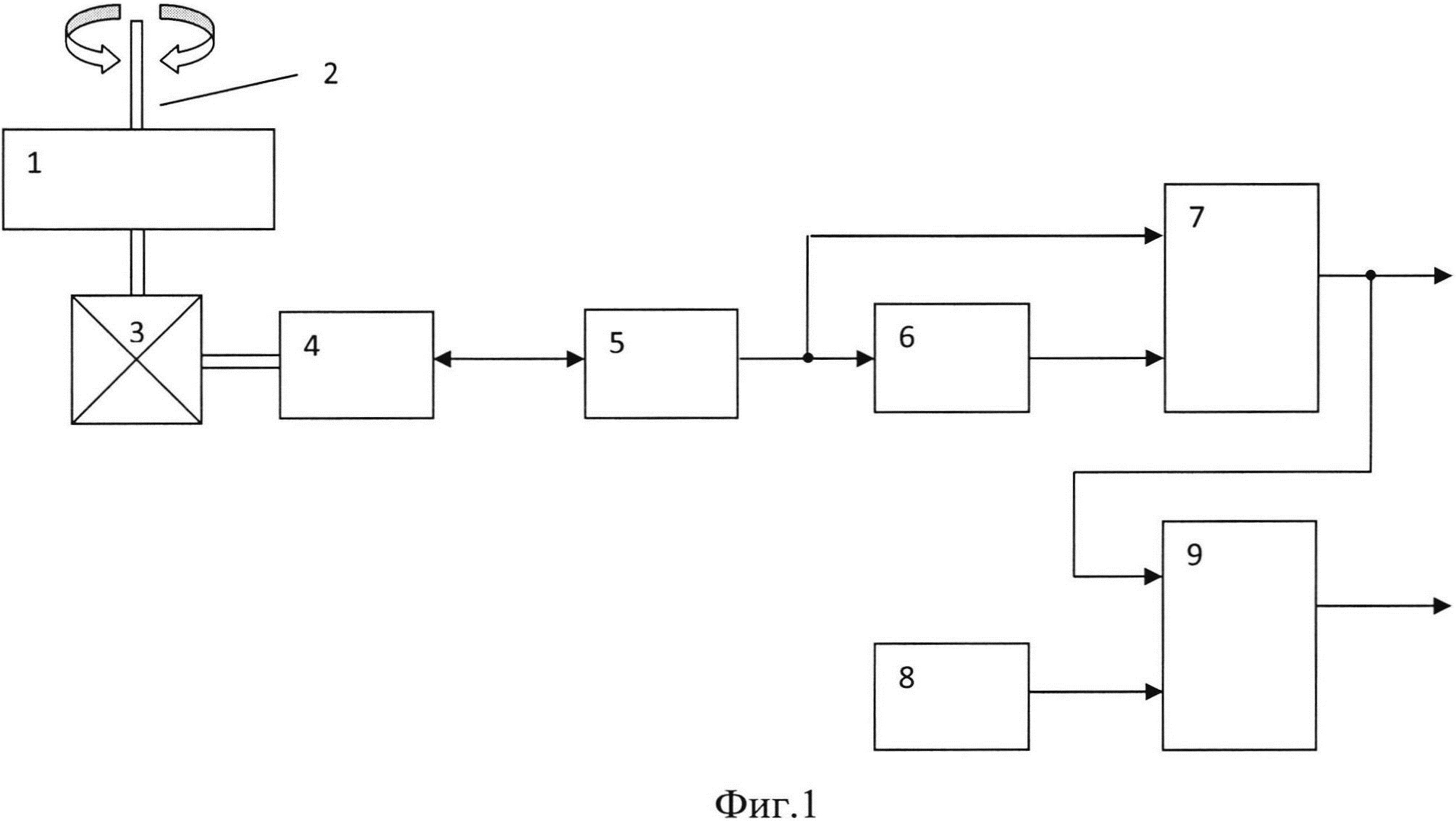
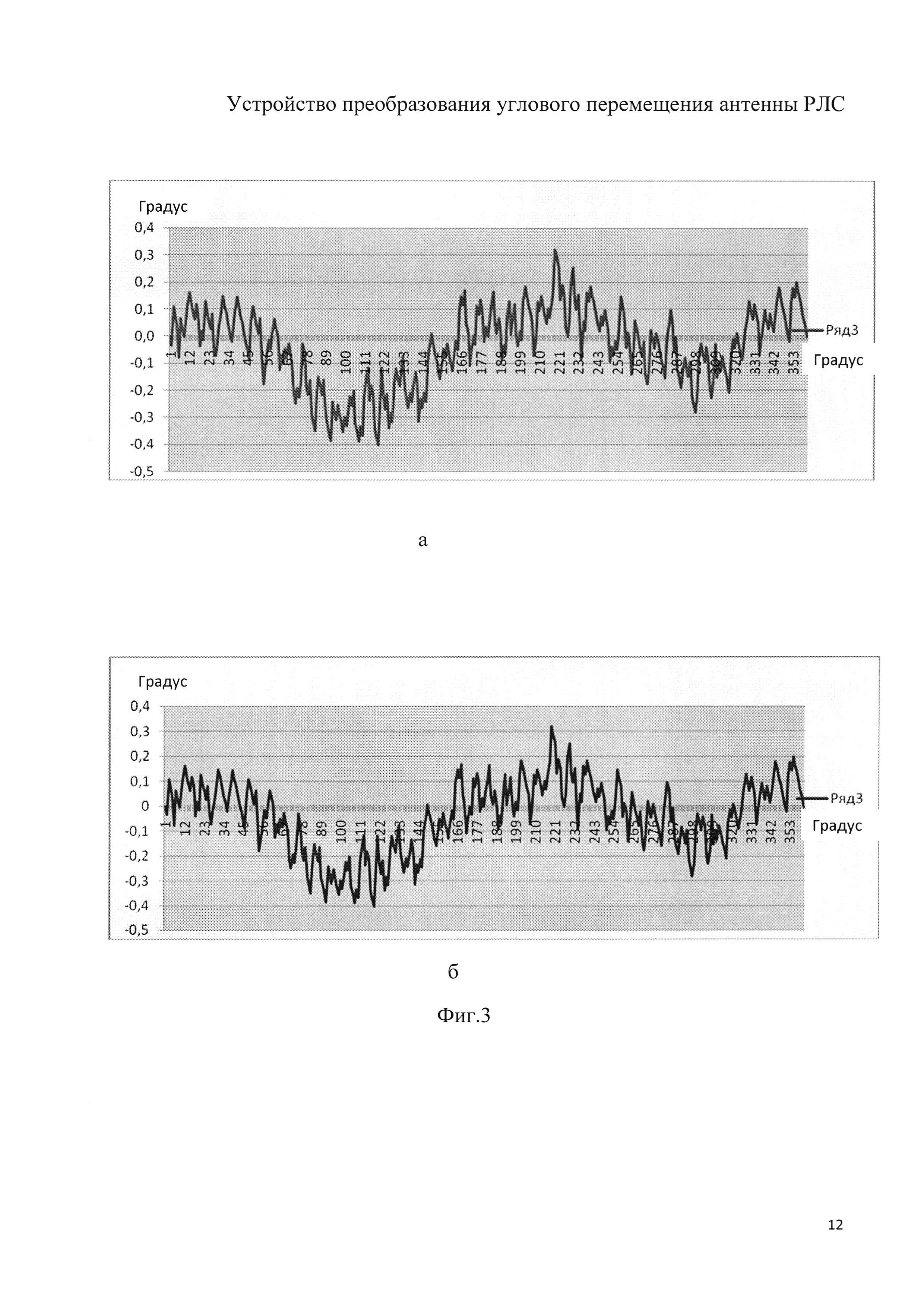
Сущность изобретения поясняется нижеследующим описанием и графическими материалами, где на фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - график кинематической погрешности датчика с двухступенчатым редуктором; на фиг. 3а, б приведена погрешность информационной передачи в зависимости от углового положения антенной колонки для двух измерений (фиг. 3а - первое измерение, фиг. 3б - второе измерение); на фиг. 4 - график усредненных значений ошибки с интервалом усреднения 10°.
Предлагаемое устройство преобразования углового перемещения антенны РЛС содержит опорно-поворотное устройство (ОПУ) 1; вал 2 антенны (ВА); редуктор (Р) 3; датчик углового положения (ДУП) 4; устройство опроса (УО) 5; постоянное запоминающее устройство (ПЗУ) 6; первое вычислительное устройство (ВУ) 7; датчик кода привязки к северу (ДПС) 8, второе вычислительное устройство (ВУ) 9. Ось датчика углового положения 4 кинематически через редуктор 3 связана с валом 2 антенны. Выход датчика 4 подключен к входу устройства опроса 5, выход которого подсоединен к адресному входу постоянного запоминающего устройства 6 и первому входу первого вычислительного устройства 7, второй вход которого подключен к выходу постоянного запоминающего устройства 6, а выход является выходом кода углового положения и также подключен к первому входу второго вычислительного устройства 9, второй вход которого подсоединен к выходу датчика кода привязки к северу, а выход является выходом кода углового положения с привязкой к северу.
Опорно-поворотное устройство (ОПУ) 1 содержит силовой редуктор, механически связанный с исполнительным двигателем системы наведения (на схеме не показаны).
Редуктор (Р) 3 предназначен для информационной передачи от вала антенны к оси датчика и может быть выполнен, например, в виде одно- или двухступенчатого редуктора в безлюфтовом исполнении.
Датчик углового перемещения (ДУП) 4 может быть выполнен на основе любого типа датчика, обеспечивающего требуемую разрядность выходного кода, например на основе фотоэлектрического цифрового преобразователя ПФ-ДЭ-14-50 ПИЖМ.401264.006ТУ.
Устройство опроса (УО) 5 обеспечивает обращение к датчику, прием и, при необходимости, обработку выходной информации с датчика. Тип интерфейса и параметры обмена определяются технической документацией на выбранный датчик.
Постоянное запоминающее устройство (ПЗУ) 6 может быть выполнено на основе РППЗУ. Разрядность данных - ориентировочно 4…6 разрядов. Разрядность адресного входа определяет глубину ПЗУ и может быть выбрана в зависимости от характера изменения кинематической погрешности от максимальной, равной разрядности выходного кода ДУП, до нескольких разрядов.
Вычислительные устройства (ВУ) 7, 9 могут быть выполнены, например, на основе цифрового сумматора соответствующей разрядности с учетом знака или на основе АЛУ. Второе вычислительное устройство (ВУ) 9 может быть выполнено также на базе персонального компьютера автоматизированного рабочего места оператора.
Датчик кода привязки к северу (ДПС) предназначен для определения направления на север в связанной с центром ОПУ РЛС системе координат и обеспечивает выходной сигнал в виде углового кода соответствующей разрядности. Может быть выполнен, например, на основе системы спутниковой навигации, ГЛОНАСС, GPS и др., (Спутниковые навигационные системы, 2004, МАИ, каф. 604 с. 98 п. 7.1.9. Определение ориентации с помощью спутниковых систем).
Перед работой устройства должно быть запрограммировано ПЗУ 6.
Для этого, после установки устройства в составе РЛС, юстируют датчик 4 относительно нуля транспортной базы, затем снимают зависимость выходного кода датчика 4 от истинного угла поворота вала антенны 2 для n положений, например, через 1°, в пределах одного оборота вала 2. Угол поворота вала 2 антенны определяют с помощью лимба с нониусом опорно-поворотного устройства 1, который должен обеспечивать погрешность измерения не хуже, чем погрешность, соответствующая ±(0,5…1) м.р. выходного кода датчика углового положения 4. Определяют значения ошибок для всех снятых точек как разность кодов истинного угла поворота и кода датчика углового положения 4. Значения полученных ошибок, которые должны быть записаны в ПЗУ для компенсации кинематической погрешности информационной передачи, обычно не превышают 4…6 разрядов углового кода.
Разрядность адресного входа может быть выбрана такой же, как разрядность выходного кода датчика угла поворота, при этом можно компенсировать ошибку каждого разряда. Однако на практике в этом нет никакой необходимости, так как кинематическая ошибка изменяется плавно с изменением угла поворота вала.
В связи с этим с целью уменьшения объема ПЗУ 6 и снижения цифровых шумов датчика углового положения проводят усреднение полученных значений ошибок на интервале углов, в котором ошибка, ориентировочно, изменяется не более чем на 1 м.р.
На фиг. 4 приведен график усредненных значений кода ошибки с интервалом усреднения 10°. Видно, что на графике отображается характер изменения кинематической ошибки информационной передачи при снижении цифрового шума датчика углового положения. Таким образом, на интервалах не более указанного, может быть получена достоверная информация об ошибке, например, на адресный вход ПЗУ 6 можно подать только 6 старших разрядов углового кода, чтобы записывать значения ошибки каждые 5, 6°. Всего будет записано 64 значения, по одному для каждого интервала, которые достаточно точно аппроксимируют кинематическую погрешность редуктора 3.
Осуществляют запись в ПЗУ 6 полученных усредненных кодов ошибки по соответствующим адресам, например, при помощи программатора.
Запись в ПЗУ 6 производится однократно при установке устройства в станции. На фиг. 3 приведены результаты двух измерений, выполненных на одном изделии, из которых видна повторяемость результатов (отклонения не превышают ±1 м.р.). Следует отметить, что даже при замене датчика 4 повторное снятие указанной зависимости не требуется, если при этом редуктор 3 остается на месте. Потребуется только юстировка датчика углового положения 4.
Устройство работает следующим образом.
Вращение вала антенны 2 через одноступенчатый или многоступенчатый безлюфтовый редуктор 3 с передаточным отношением 1:1 передается на ось датчика углового положения 4. Датчик 4 формирует код углового положения вала антенны 2 с кинематической ошибкой информационной передачи, зависящей от текущего углового положения антенны, и передает его в устройство опроса 5. Указанная ошибка записана в ПЗУ 6 для каждого углового диапазона, определяемого кодом адреса на входе ПЗУ 6. С выхода устройства опроса 5 старшие разряды кода углового положения поступают на адресный вход ПЗУ 6.Таким образом, на его выходе выбирается значение усредненной ошибки, соответствующее текущему угловому интервалу. Код углового положения с выхода УО 5 поступает также на первый вход первого вычислительного устройства 7, на втором входе которого присутствует код выбранного значения ошибки с выхода ПЗУ 6. Вычислительное устройство 7 осуществляет алгебраическое суммирование указанных кодов. В результате на первом выходе ВУ 7 появляется код углового положения вала антенны 2 с компенсированной кинематической ошибкой информационной передачи.
Сигналы с выхода датчика 8 кода привязки к северу поступают на второй вход второго вычислительного устройства 9, которое производит соответствующую корректировку, и на выходе ВУ 9 формируется код углового положения антенны с привязкой к северу и компенсированной кинематической ошибкой информационной передачи.
Упрощение, снижение себестоимости и повышение надежности достигается не только сокращением количества аппаратуры по сравнению с известными устройствами. Важно отметить, что введенные ПЗУ и вычислительное устройство могут быть выполнены на уже имеющейся в РЛС аппаратуре, а именно на базе внутренней памяти и АЛУ микроконтроллера блока управления приводом антенны.
Повышение точности достигается благодаря исключению влияния погрешностей различных информационных передач двух датчиков, а также более точной компенсации кинематической погрешности (теоретически можно компенсировать ошибку каждого разряда выходного кода датчика углового положения).
Расширение функциональных возможностей при высокой точности обеспечивается тем, что устройство работает во всех, в том числе и в динамических, режимах с любыми, в том числе многоступенчатыми, редукторами.
Устройство преобразования углового перемещения антенны РЛС, включающее датчик углового положения, редуктор, опорно-поворотное устройство, механически связанное с валом антенны, устройство опроса, датчик кода привязки к северу, постоянное запоминающее устройство, первое и второе вычислительные устройства, при этом ось датчика углового положения кинематически через редуктор связана с валом антенны, а выход подключен к входу устройства опроса, выход которого подсоединен к адресному входу постоянного запоминающего устройства и первому входу первого вычислительного устройства, второй вход которого подключен к выходу постоянного запоминающего устройства, а выход является выходом кода углового положения и также подключен к первому входу второго вычислительного устройства, у которого ко второму входу подключен выход датчика кода привязки к северу, а выход является выходом кода углового положения с привязкой к северу.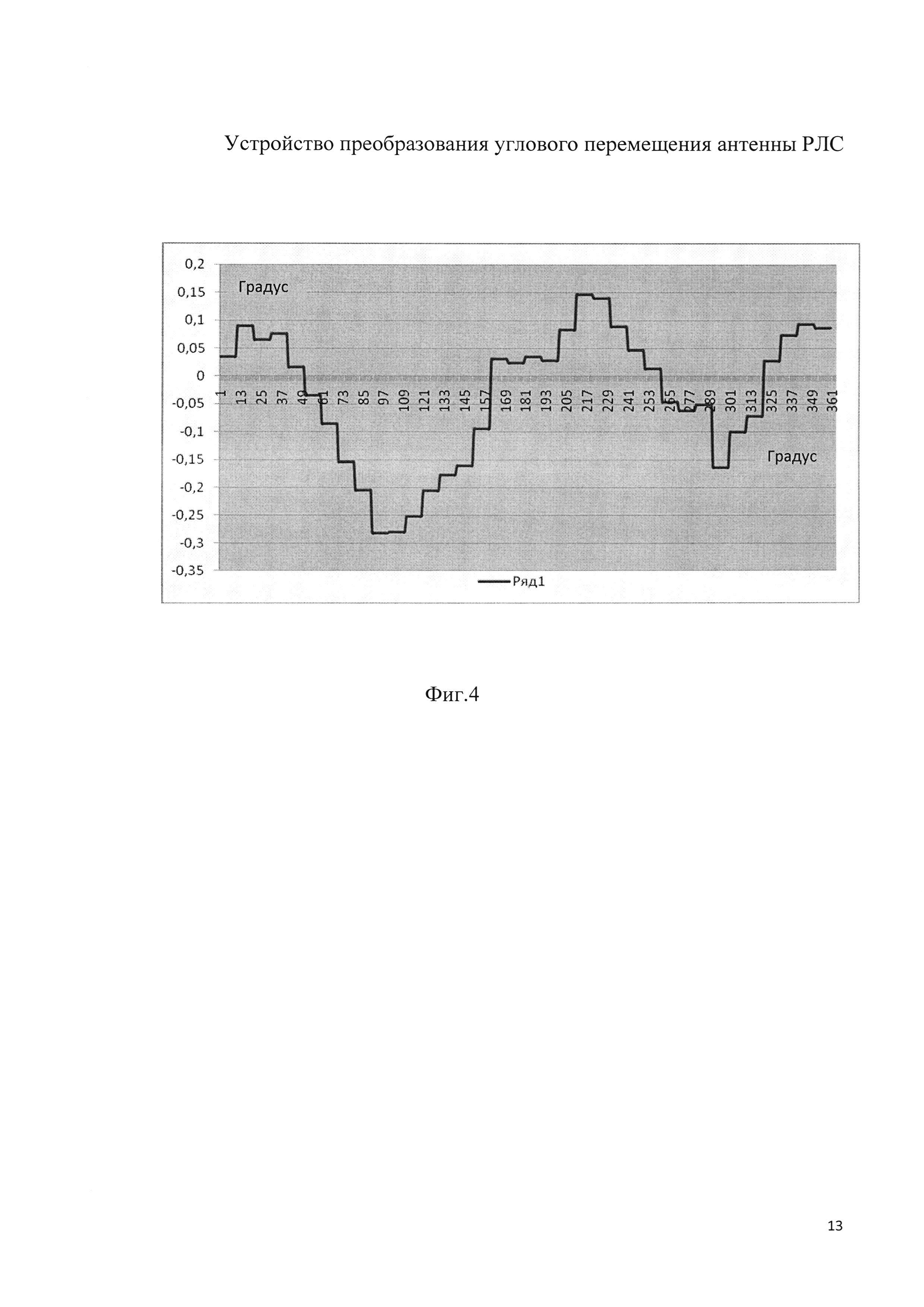
Способ получения авиационного бензина б95/130
Устройство обеспечения теплового режима и чистоты космической головной части ракеты космического назначения с крупногабаритной полезной нагрузкой
Способ наблюдения за местностью механиком-водителем военной гусеничной машины
Стенд для отработки всеглубинного пускового устройства арбалетного типа для необитаемых подводных аппаратов
Способ обеспечения эвакуации экипажа аварийной подводной лодки из всплывшей спасательной камеры
Комплекс имитации сложных военных объектов
Устройство компенсации активных помех с коммутацией компенсационного канала
Способ определения координат и скорости источника радиоизлучения
Система управления пиросредствами
Полевой индикатор естественного электромагнитного поля земли
Адаптивный способ пассивной радиолокации
Помеховый комплекс на ретрансляторах для создания помех радиолокационным средствам
Мобильная радиолокационная станция
Устройство наведения по направлению

