Результат интеллектуальной деятельности: Аппарат транспортировки и способ транспортировки
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Изобретение относится к аппарату транспортировки для транспортирования объекта транспортировки в направлении транспортировки и к способу транспортировки.
Уровень техники изобретения
[0002] Традиционно, были доступны аппараты транспортировки для транспортировки объектов, таких как багаж, к местам назначения. Например, в аэропорту аппарат транспортировки багажа аэропорта используется, чтобы транспортировать багаж пассажиров в зону погрузки, близкую к пассажирскому самолету, в который должны садиться пассажиры.
Что касается такого аппарата транспортировки багажа аэропорта, большой аэропорт, например узловой аэропорт, имеющий обширную площадь, ведет к очень длинному расстоянию от местоположения для проверки багажа пассажиров на стойке регистрации, до местоположения, где стоит предназначенный самолет (или области погрузки рядом с местоположением), и большому числу отдельных предметов багажа. Таким образом, для того, чтобы доставлять весь багаж к самолету в ограниченное время, прежде чем самолет взлетит, скорость транспортировки для багажа должна быть повышена.
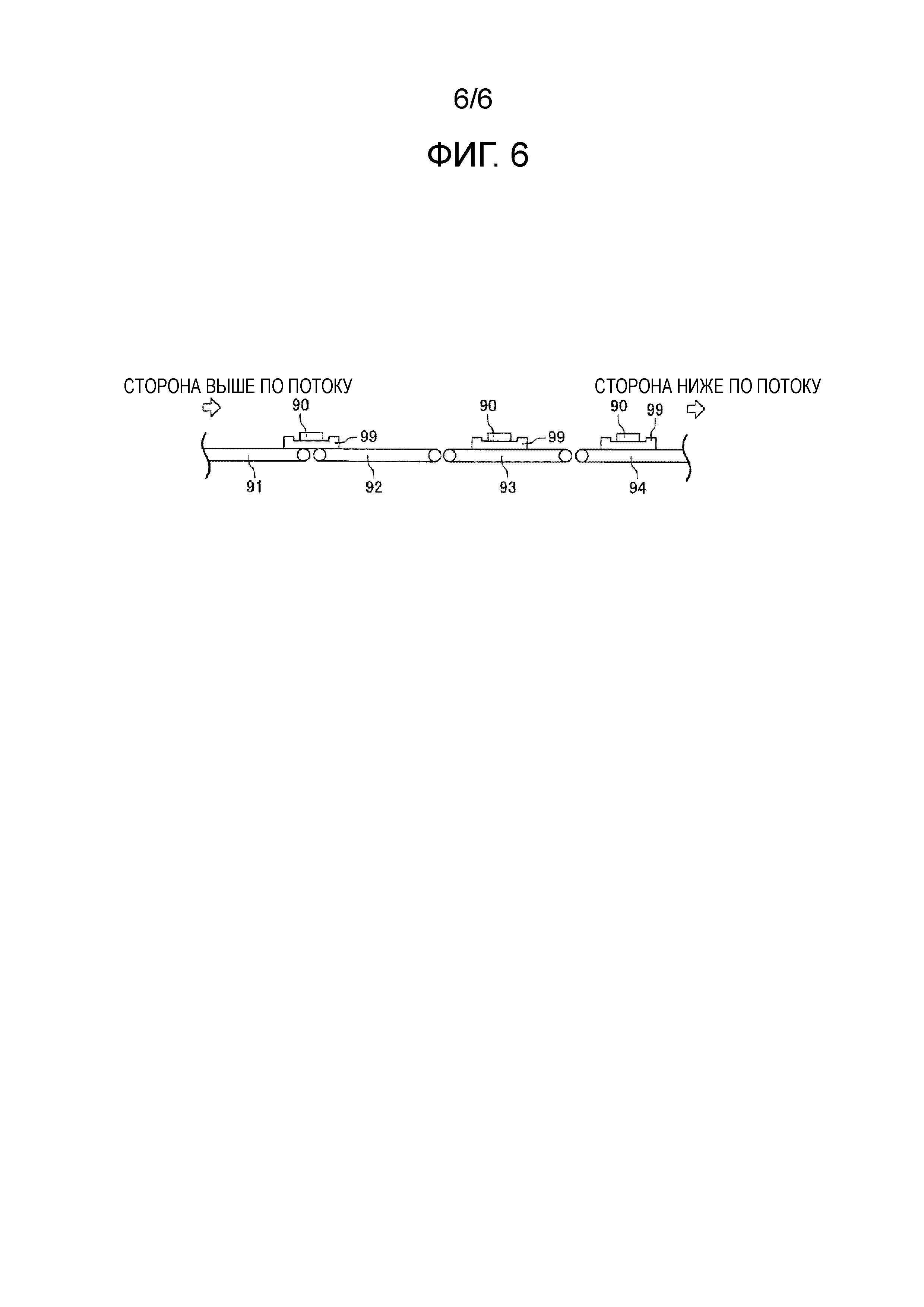
[0003] В качестве традиционного способа транспортировки объектов, таких как багаж, с высокой скоростью фиг. 6 показывает способ транспортировки по пути транспортировки, включающему в себя множество транспортеров (например, ленточный транспортер или колесный транспортер). Объект 90 транспортировки на пути транспортировки сначала помещается на лоток 99 на первом транспортере 91, расположенном на самом верхнем по потоку конце пути. Первый транспортер 91 транспортирует лоток 99, несущий объект 90 транспортировки, с постоянной низкой скоростью транспортировки. Второй транспортер 92 с постоянной скоростью, более высокой, чем скорость первого транспортера 91, располагается ниже по потоку от первого транспортера 91. Кроме того, множество транспортеров (с постоянными скоростями), включающих в себя высокоскоростной третий транспортер 93 и высокоскоростной четвертый транспортер 94, предусматриваются последовательно ниже по потоку от второго транспортера 92 с тем, чтобы последовательно увеличивать скорость транспортировки. Лоток 99, несущий объект 90 транспортировки, последовательно переносится на эти транспортеры с тем, чтобы постепенно увеличивать скорость транспортировки для объекта 90 транспортировки. Это может увеличивать скорость транспортировки всего пути транспортировки. В области рядом с местом назначения (например, самолетом для перевозки пассажиров) множество транспортеров предусматриваются последовательно с тем, чтобы последовательно уменьшать скорость транспортировки в противоположность вышеописанному постепенному увеличению скорости транспортировки. Лоток 99, несущий объект 90 транспортировки, последовательно переносится на эти транспортеры с постепенным замедлением.
Выложенный японский патент № 9-323810 раскрывает в качестве связанного уровня техники такой традиционный аппарат транспортировки с постепенным ускорением и замедлением.
[0004]
[0005] В способе постепенного ускорения/замедления, который описан выше, однако, скорость транспортировки быстро изменяется, когда лоток 99 переносится на другой транспортер. Таким образом, объект 90 транспортировки на лотке 99 получает инерционное усилие, вызванное ускорением транспортировки (изменением скорости транспортировки). Когда небольшой чемодан транспортируется в качестве багажа пассажира в аппарате транспортировки багажа аэропорта, такое инерционное усилие может вызывать толчок по отношению к содержимому небольшого чемодана или сдвигать позицию небольшого чемодана на лотке 99. Таким образом, пассажирский багаж может в недостаточной степени поддерживаться или менее плавно транспортироваться.
Например, в случае ленточного аппарата транспортировки, когда скорость транспортировки быстро изменяется во время перемещения лотка 99 по транспортерам, может возникать проскальзывание между лотком 99 и лентами транспортеров. Таким образом, многократная транспортировка может изнашивать ленты и лоток.
Для того, чтобы решать вышеупомянутые проблемы, в изобретении выложенного японского патента № 9-323810 вал транспортера, имеющий винтовую канавку, вращается с возвращаемой оболочкой, сцепленной с винтовой канавкой, добиваясь непрерывного ускорения и замедления.
Однако, если такая конфигурация устанавливается на обширной площади большого аэропорта, вал транспортера, имеющий винтовую канавку, которая является деталью для конфигурации, должен быть предусмотрен на протяжении длинного пути. Кроме того, возвращаемая оболочка должна быть специально предназначена для сцепления с винтовой канавкой. Это может чрезмерно увеличивать стоимость внедрения. Кроме того, усложненная конфигурация ведет к низкой надежности и трудности в техническом обслуживании. Во время ускорения возвращаемой оболочки с помощью вала транспортера, последующая возвращаемая оболочка не может быть транспортирована со стороны выше по потоку от вала транспортера в секцию вала транспортера. Последующая возвращаемая оболочка не может быть транспортирована в секцию вала транспортера, пока предшествующая возвращаемая оболочка не будет транспортирована до конечного ускорения, и затем вал транспортера замедляется до первоначальной скорости. Таким образом, эффективность транспортировки не может быть значительно улучшена.
Задачей настоящего изобретения является предоставление аппарата транспортировки, который увеличивает скорость транспортировки объекта транспортировки на протяжении всего пути транспортировки без возникновения толчка и смещения объекта транспортировки и значительно улучшает надежность, эффективность транспортировки при низких затратах.
Сущность изобретения
[0006] Для того, чтобы решать проблемы, аппарат транспортировки настоящего изобретения является аппаратом транспортировки для транспортировки объекта транспортировки, аппарат транспортировки имеет путь транспортировки в направлении транспортировки объекта транспортировки, путь транспортировки включает в себя множество секций транспортировки, предусмотренных по направлению транспортировки, объект транспортировки транспортируется через путь транспортировки, при этом, по меньшей мере, две секции транспортировки являются секциями транспортировки с постоянной скоростью, каждая из которых транспортирует объект транспортировки с постоянной скоростью транспортировки, каждая из секций транспортировки с постоянной скоростью имеет свою постоянную скорость транспортировки, предварительно определенную согласно каждой из секций транспортировки с постоянной скоростью, расположенная выше по потоку секция транспортировки с постоянной скоростью является одной из секций транспортировки с постоянной скоростью, расположенной на стороне выше по потоку в направлении транспортировки, расположенная ниже по потоку секция транспортировки с постоянной скоростью является другой секцией из секций транспортировки с постоянной скоростью, расположенной на стороне ниже по потоку в направлении транспортировки, расположенная выше по потоку секция транспортировки с постоянной скоростью и расположенная ниже по потоку секция транспортировки с постоянной скоростью имеют скорости транспортировки, отличные друг от друга, путь транспортировки включает в себя секцию ускорения/замедления между распложенной выше по потоку секцией транспортировки с постоянной скоростью и расположенной ниже по потоку секцией транспортировки с постоянной скоростью, секция ускорения/замедления включает в себя множество секций транспортировки с переменной скоростью, способных изменять скорость транспортировки объекта транспортировки, каждая из секций транспортировки с переменной скоростью, включенных в секцию ускорения/замедления, имеет скорость транспортировки, которая непрерывно ускоряется или замедляется во время транспортировки транспортируемого объекта, в то время как транспортируемый объект проходит через всю секцию ускорения/замедления, скорость транспортировки транспортируемого объекта ускоряется или замедляется от скорости транспортировки расположенной выше по потоку секции транспортировки с постоянной скоростью до скорости транспортировки расположенной ниже по потоку секции транспортировки с постоянной скоростью, скорость транспортировки и ускорение/замедление транспортировки управляются, чтобы быть идентичными между расположенной выше по потоку секцией транспортировки, транспортирующей объект транспортировки, и расположенной ниже по потоку секцией транспортировки, расположенной на стороне ниже по потоку от расположенной выше по потоку секции транспортировки, когда объект транспортировки переносится с расположенной выше по потоку секции транспортировки на расположенную ниже по потоку секцию транспортировки, и после того как объект транспортировки транспортируется на расположенную ниже по потоку секцию транспортировки, скорость транспортировки секции транспортировки с переменной скоростью, расположенной на стороне выше по потоку, ускоряется или замедляется так, чтобы приближаться к скорости транспортировки расположенной выше по потоку секции транспортировки с постоянной скоростью.
Согласно аппарату транспортировки, когда объект транспортировки переносится с конкретной одной из секций транспортировки на последующую секцию транспортировки, скорость транспортировки и ускорение/замедление транспортировки быстро не изменяются. Таким образом, объект транспортировки не принимает инерционное усилие, вызванное быстрым изменением скорости. Секции транспортировки, составляющие путь транспортировки, могут быть обычными транспортерами с гарантированной надежностью (фактически работающими), пока такое управление выполняется.
Кроме того, скорость транспортировки постоянно ускоряется или замедляется, в то время как объект транспортировки транспортируется по каждой из секций транспортировки переменной скорости в секции ускорения/замедления. Таким образом, объект транспортировки может достигать скорости транспортировки расположенной ниже по потоку секции транспортировки с постоянной скоростью в короткое время на коротком расстоянии. Это может уменьшать длину и число секций транспортировки с переменной скоростью, включенных в секцию ускорения/замедления. Это предоставляет возможность секциям транспортировки с постоянной скоростью, которые устанавливаются и эксплуатируются с низкими затратами вследствие их простых механизмов для транспортировки с постоянной скоростью, по большей части охватывать путь транспортировки.
Кроме того, секция ускорения/замедления включает в себя секции транспортировки с переменной скоростью. И расположенная выше по потоку секция транспортировки с переменной скоростью переносит объект транспортировки ниже по потоку от нее и затем возвращается к первоначальной скорости транспортировки. Таким образом, в то время как объект транспортировки транспортируется и ускоряется или замедляется в секции ускорения/замедления, последующий объект может транспортироваться в секцию транспортировки с переменной скоростью, вернувшейся к первоначальной скорости. Это устраняет необходимость в ожидании завершения транспортировки через секцию ускорения/замедления, тем самым, в значительной степени улучшая эффективность транспортировки.
[0007] В дополнение к вышеописанному признаку, аппарат транспортировки согласно настоящему изобретению может характеризоваться следующим образом: путь транспортировки содержит исходные позиции ускорения/замедления, заданные для соответствующих секций транспортировки с переменной скоростью, управление переносом выполняется, после того как объект транспортировки достигает исходной позиции ускорения/замедления, и в управлении переносом секция транспортировки с переменной скоростью для исходной позиции ускорения/замедления имеет скорость транспортировки, которая ускоряется или замедляется с предварительно определенным ускорением/замедлением переноса.
Согласно аппарату транспортировки, имеющему этот признак, скорость транспортировки может управляться на относительно простом этапе начала ускорения/замедления с предварительно определенным ускорением/замедлением, когда объект транспортировки достигает предварительно определенной позиции. Это облегчает конструирование и внедрение аппарата транспортировки.
[0008] В дополнение к отличительным признакам аппарата транспортировки согласно настоящему изобретению исходная скорость задается для каждой из секций транспортировки с переменной скоростью, и исходная скорость, исходная позиция ускорения/замедления и ускорение/замедление переноса могут быть заданы, чтобы удовлетворять следующему условию:
управление переносом выполняется так, что объект транспортировки достигает исходной позиции ускорения/замедления, и затем скорость транспортировки секции транспортировки с переменной скоростью, соответствующей исходной позиции ускорения/замедления, ускоряется или замедляется с постоянным ускорением/замедлением переноса от исходной скорости, предоставляя возможность скорости транспортировки секции транспортировки с переменной скоростью быть идентичной скорости транспортировки секции транспортировки выше по потоку от секции транспортировки с переменной скоростью, когда объект транспортировки достигает секции транспортировки с переменной скоростью.
Согласно этому замыслу, скорости транспортировки верхней по потоку и нижней по потоку секций транспортировки могут управляться, чтобы уравниваться во время переноса объекта транспортировки на относительно простом этапе ускорения или замедления скорости транспортировки секции транспортировки с переменной скоростью, соответствующей исходной позиции ускорения/замедления, с постоянным ускорением/замедлением транспортировки, когда объект транспортировки достигает исходной позиции ускорения/замедления. Это облегчает конструирование и внедрение аппарата транспортировки.
[0009] В дополнение к вышеописанным признакам, аппарат транспортировки согласно настоящему изобретению может характеризоваться следующим образом: когда объект транспортировки в секции транспортировки с переменной скоростью переносится на секцию транспортировки ниже по потоку от секции транспортировки с переменной скоростью, управление восстановлением скорости выполняется, и при управлении восстановлением скорости секция транспортировки с переменной скоростью имеет скорость транспортировки, которая ускоряется или замедляется до исходной скорости с ускорением/замедлением восстановления, имеющим абсолютное значение больше ускорения/замедления переноса.
Согласно аппарату транспортировки, имеющему отличительный признак, секция транспортировки с переменной скоростью перемещает объект транспортировки в его расположенную ниже по потоку секцию транспортировки и затем возвращается к исходной скорости в более коротком периоде, чем период транспортировки объекта транспортировки в секции транспортировки с переменной скоростью. Таким образом, следующий предмет может быть перемещен в секцию транспортировки раньше, улучшая эффективность транспортировки.
[0010] В дополнение к вышеописанным признакам, аппарат транспортировки согласно настоящему изобретению может характеризоваться следующим образом: множество контейнеров единообразных форм, которые должны транспортироваться, транспортируются по пути транспортировки посредством транспортеров, и объект транспортировки транспортируется, в то же время хранясь в контейнере, который должен быть транспортирован в каждой из секций транспортировки.
Согласно аппарату транспортировки, имеющему отличительный признак, контейнеры единообразных форм, которые должны быть транспортированы, непосредственно транспортируются посредством транспортеров. Таким образом, заданные значения для производительности и управления устройствами, используемыми для транспортировки, могут быть определены заранее относительно форм контейнеров, которые должны быть транспортированы, без необходимости принимать во внимание формы индивидуальных транспортируемых предметов. Это облегчает конструирование и внедрение аппарата транспортировки.
[0011] В аппарате транспортировки согласно настоящему изобретению вышеописанный контейнер, который должен транспортироваться, имеет фрагмент в виде перевернутого конуса, где размеры в направлении транспортировки расширяются вверх от дна контейнера, который должен транспортироваться.
Согласно конструкции, дно контейнера, который должен транспортироваться, имеет меньшие размеры, чем верхняя часть контейнера, который должен транспортироваться в направлении транспортировки. Таким образом, даже если верхняя часть транспортируемого контейнера имеет большие размеры для предметов различных форм, дно контейнера, который должен транспортироваться, может иметь меньшие размеры в непосредственном соприкосновении с транспортерами секций транспортировки. Таким образом, во время перемещения между секциями транспортировки общий вес объекта транспортировки и контейнера, который должен транспортироваться, может быстрее перемещаться на расположенную ниже по потоку секцию транспортировки, улучшая эффективность транспортировки.
[0012] Способ транспортировки согласно настоящему изобретению является способом транспортировки для объекта транспортировки, объект транспортировки транспортируется через путь транспортировки, включающий в себя множество секций транспортировки, предусмотренных в направлении транспортировки объекта транспортировки, при этом, по меньшей мере, две секции транспортировки являются секциями транспортировки с постоянной скоростью, каждая из которых транспортирует объект транспортировки с предварительно определенной постоянной скоростью транспортировки, секции транспортировки с постоянной скоростью включают в себя расположенную выше по потоку секцию транспортировки с постоянной скоростью, расположенную на стороне выше по потоку, и расположенную ниже по потоку секцию транспортировки с постоянной скоростью, расположенную на стороне ниже по потоку в направлении транспортировки, с различными скоростями транспортировки, путь транспортировки включает в себя секцию ускорения/замедления между расположенной выше по потоку секцией транспортировки с постоянной скоростью и расположенной ниже по потоку секцией транспортировки с постоянной скоростью, секция ускорения/замедления включает в себя множество секций транспортировки с переменной скоростью, способных изменять скорость транспортировки объекта транспортировки, в каждой из секций транспортировки с переменной скоростью, включенной в секцию ускорения/замедления, способ включает в себя: непрерывное ускорение или замедление скорости транспортировки секции транспортировки с переменной скоростью во время транспортировки объекта транспортировки с тем, чтобы ускорять или замедлять скорость транспортировки объекта транспортировки, в то время как объект транспортировки проходит через всю секцию ускорения/замедления, со скорости транспортировки расположенной выше по потоку секции транспортировки с постоянной скоростью до скорости транспортировки расположенной ниже по потоку секции транспортировки с постоянной скоростью; управление скоростью транспортировки и ускорением/замедлением транспортировки, чтобы они были идентичными между расположенной выше по потоку секцией транспортировки, транспортирующей объект транспортировки, и расположенной ниже по потоку секцией транспортировки, расположенной на стороне ниже по потоку от верхней по потоку секции транспортировки, когда объект транспортировки перемещается с расположенной выше по потоку секции транспортировки на расположенную ниже по потоку секцию транспортировки; и после того как объект транспортировки перемещается в секцию транспортировки ниже по потоку, ускорение или замедление скорости транспортировки секции транспортировки с переменной скоростью, расположенной выше по потоку, так, чтобы приближаться к скорости транспортировки расположенной выше по потоку секции транспортировки с постоянной скоростью.
Согласно способу транспортировки, когда объект транспортировки перемещается с конкретной одной из секций транспортировки на последующую секцию транспортировки, скорость транспортировки и ускорение/замедление транспортировки быстро не изменяется. Таким образом, объект транспортировки не получает инерционное усилие, вызванное быстрым изменением скорости.
[0013] Согласно настоящему изобретению, объект транспортировки не получает инерционное усилие, и, таким образом, толчок не прикладывается к объекту транспортировки во время перемещения. Кроме того, позиция объекта транспортировки во время перемещения не смещается. Это может в значительной степени добиваться сохранения и плавной транспортировки для объекта транспортировки. Кроме того, каждая из секций транспортировки может иметь простую конфигурацию, включающую в себя надежные устройства. Это не приводит к высокой стоимости внедрения в отличие от традиционного аппарата транспортировки, упрощая техническое обслуживание.
Краткое описание чертежей
[0014] Фиг. 1 – это схематичный вид сбоку, показывающий аппарат транспортировки в качестве варианта осуществления настоящего изобретения;
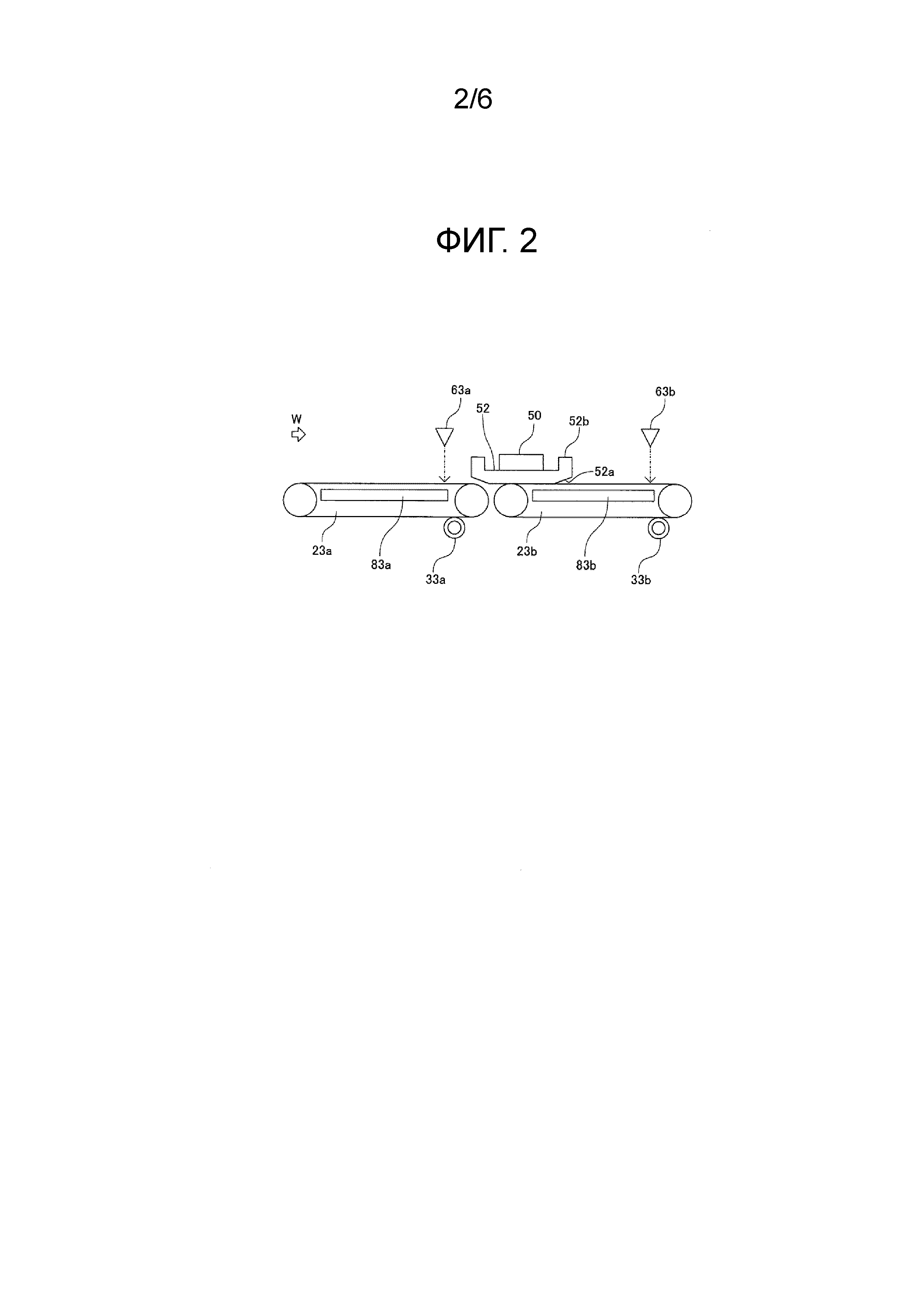
Фиг. 2 показывает аспект переноса лотка транспортера и объекта транспортировки с первой секции ускорения на вторую секцию ускорения в аппарате транспортировки в качестве варианта осуществления настоящего изобретения;
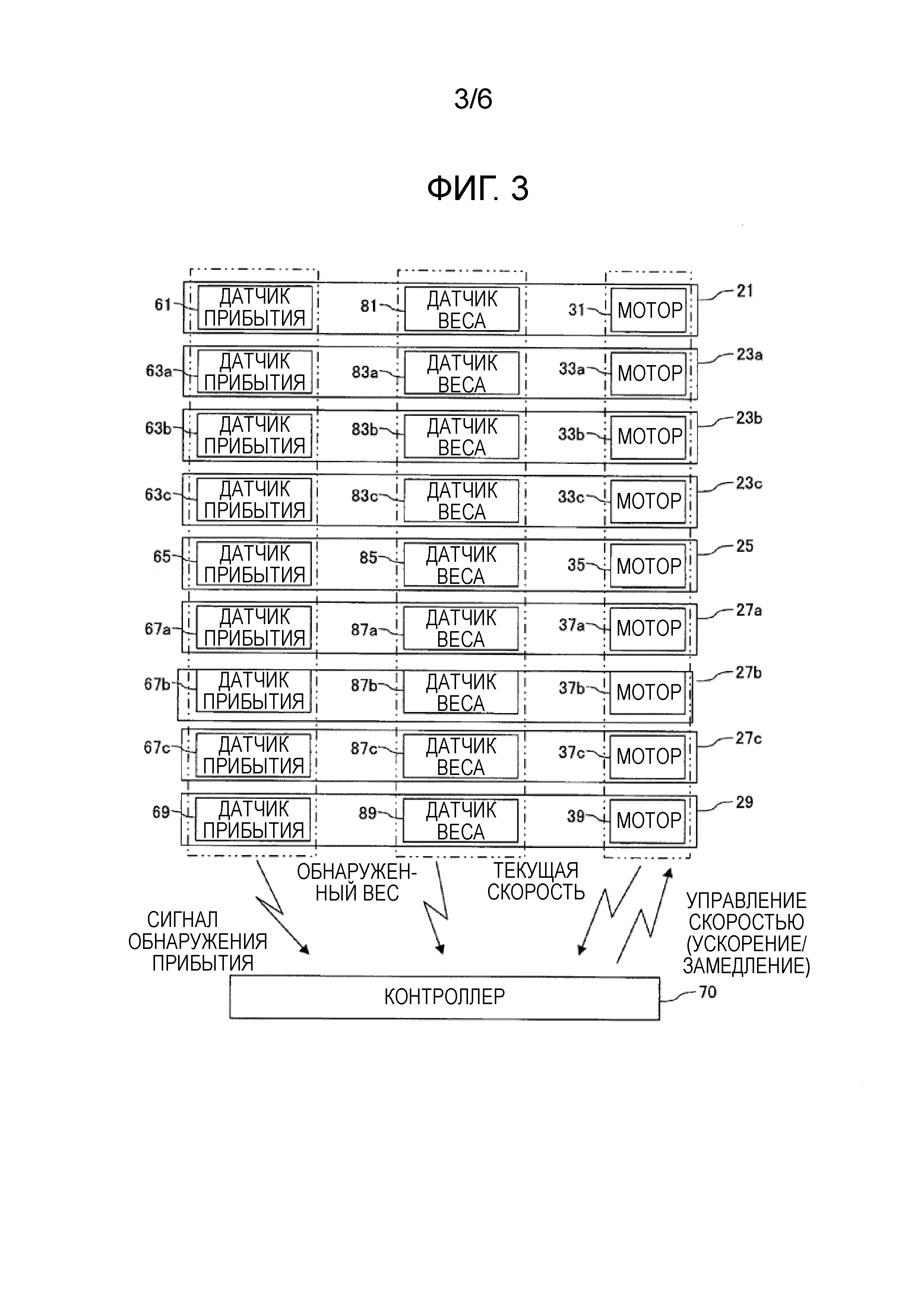
Фиг. 3 – это блок-схема, показывающая взаимное расположение между устройствами в аппарате транспортировки в качестве варианта осуществления настоящего изобретения;
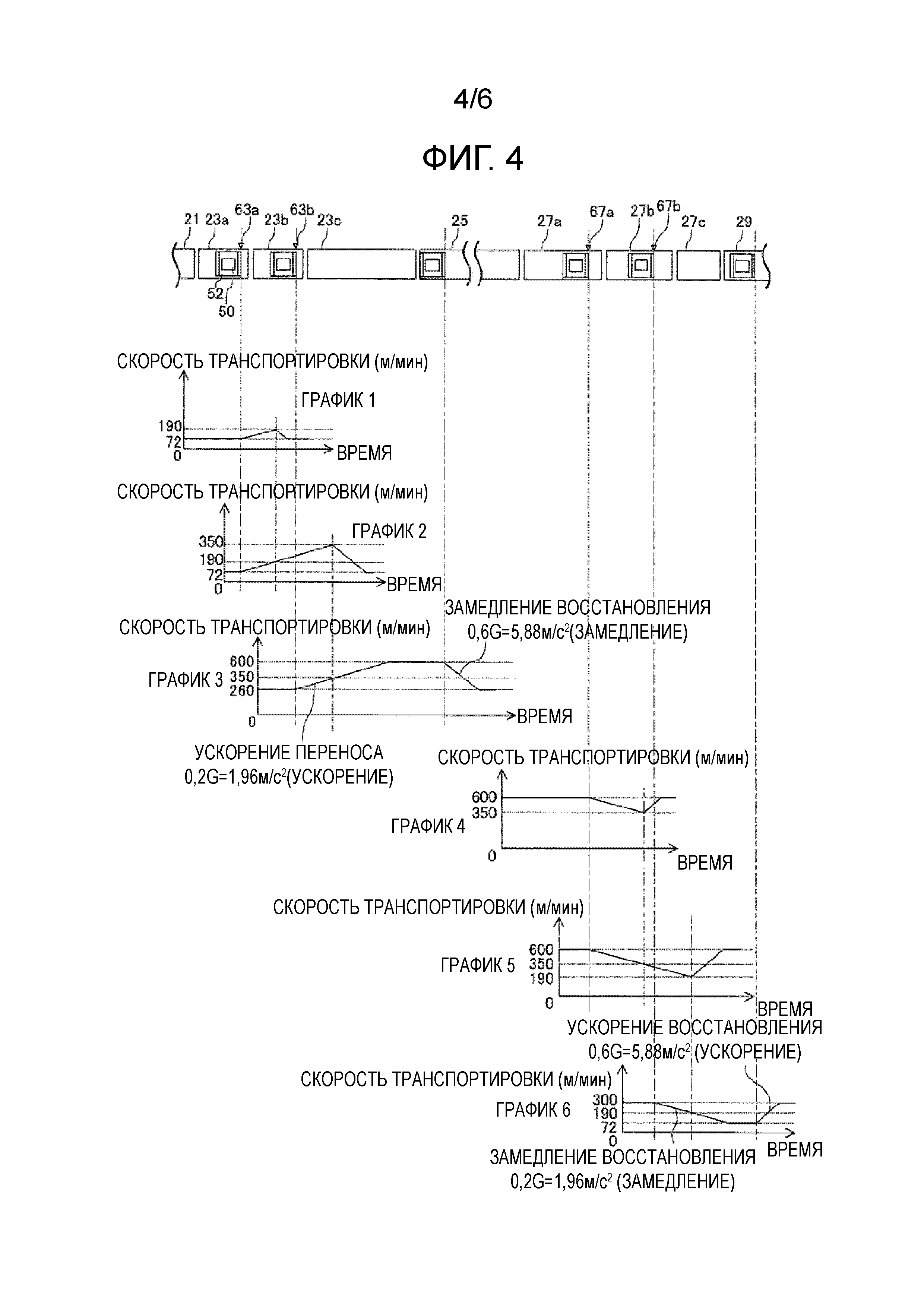
Фиг. 4 показывает изменения скорости транспортировки секций транспортировки в аппарате транспортировки с помощью графиков в качестве варианта осуществления настоящего изобретения;
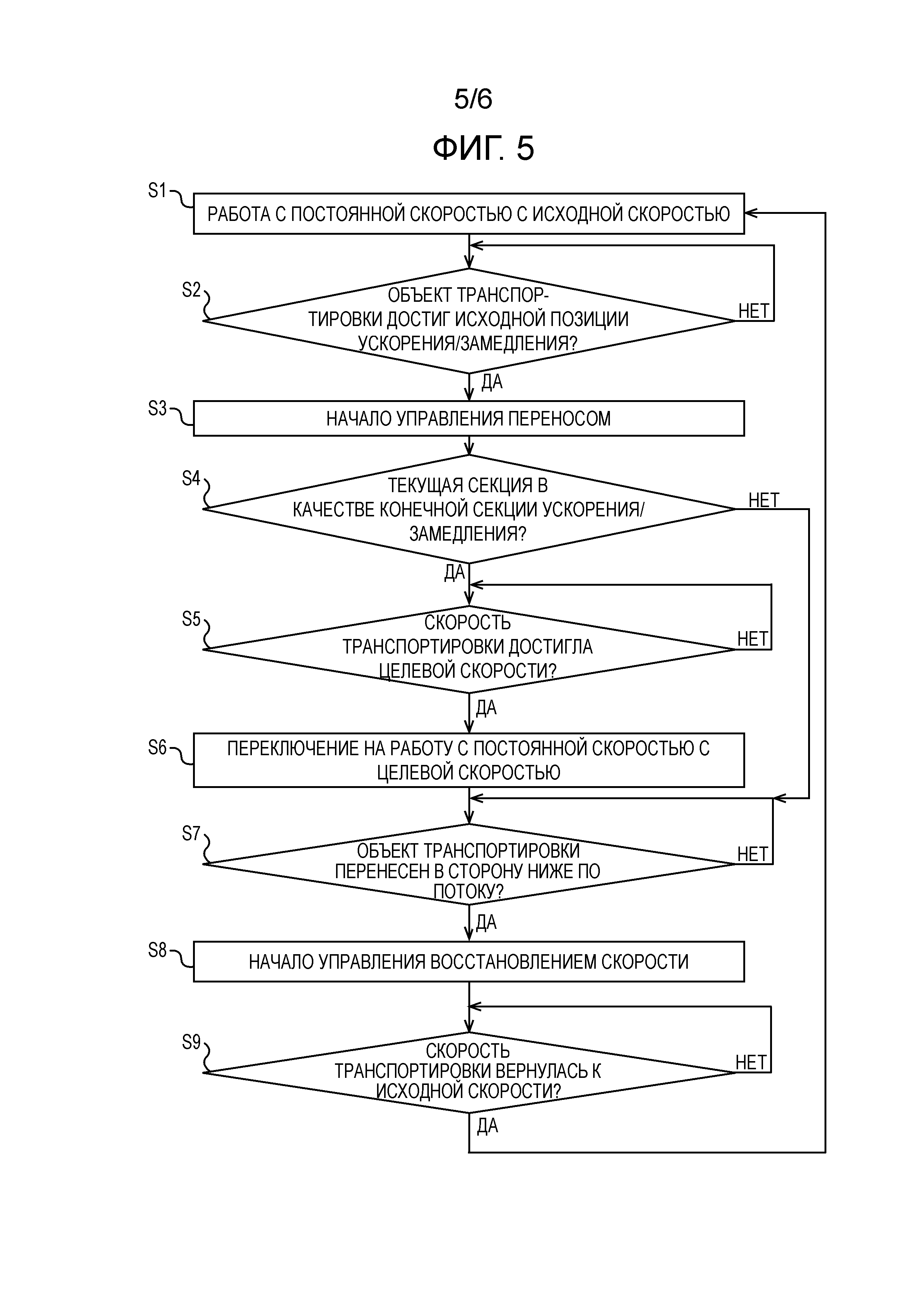
Фиг. 5 – это блок-схема последовательности операций, показывающая последовательность операций управления в аппарате транспортировки в качестве варианта осуществления настоящего изобретения; и
Фиг. 6 – это схематичный вид сбоку, показывающий традиционный аппарат транспортировки для постепенного ускорения/замедления.
Описание варианта осуществления
[0015] Обращаясь к фиг. 1-5, вариант осуществления аппарата транспортировки согласно настоящему изобретению будет описан ниже.
[Путь транспортировки]
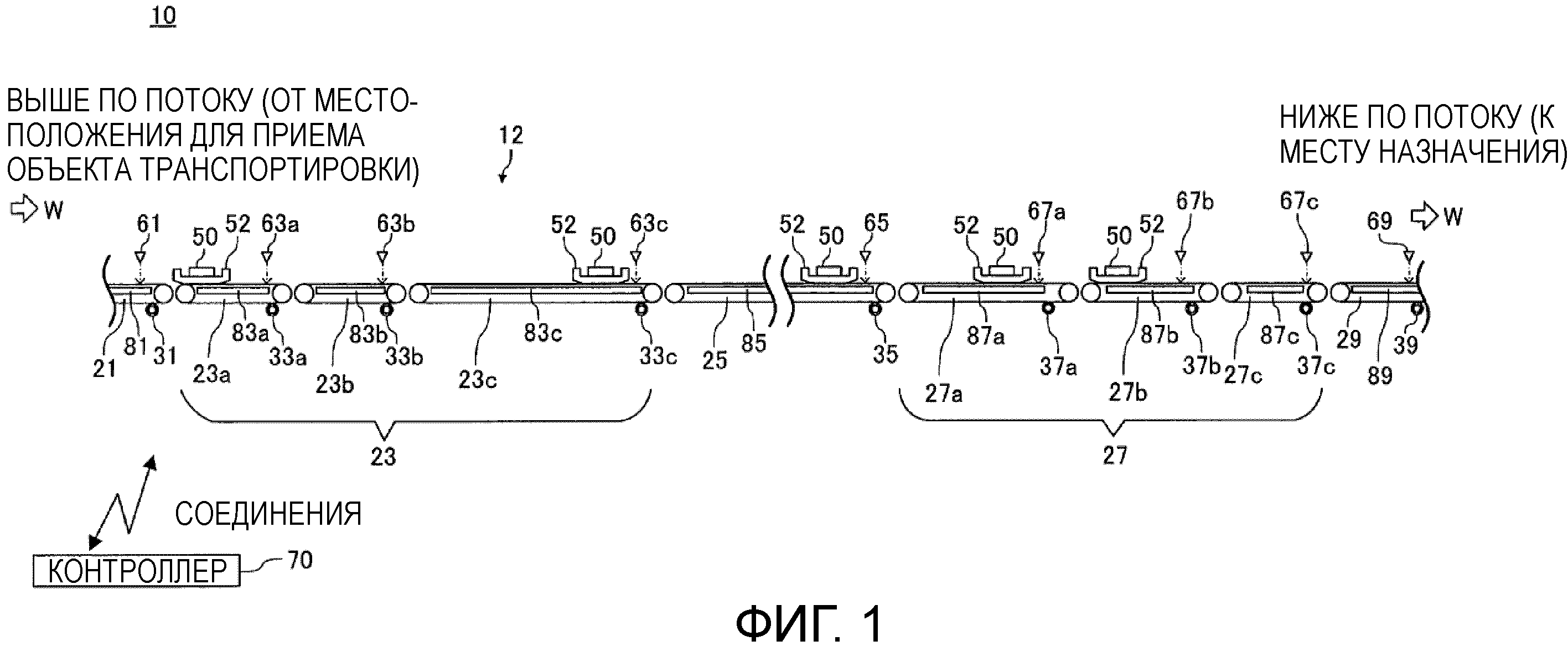
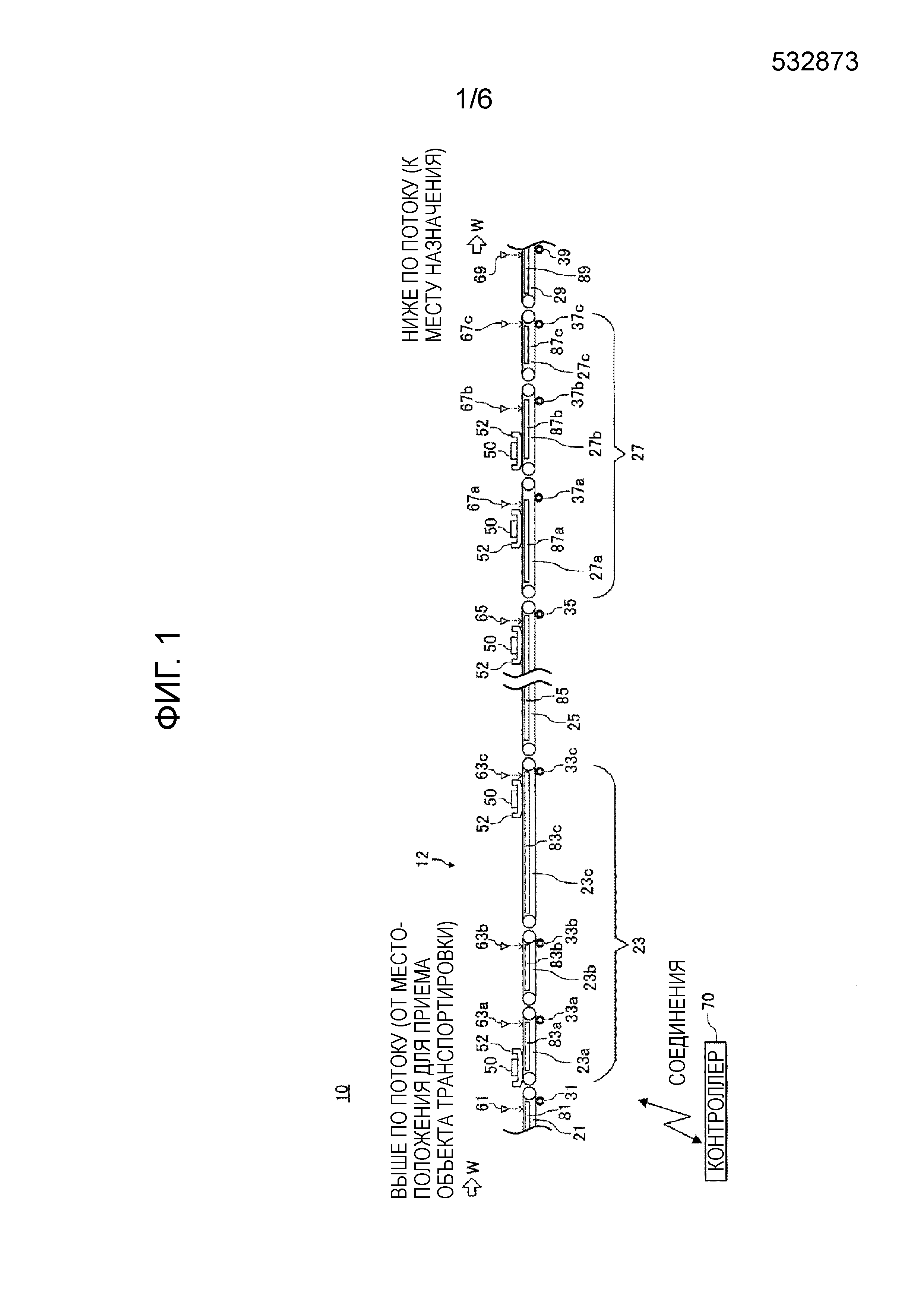
Фиг. 1 – это вид сбоку, схематично показывающий аппарат 10 транспортировки в качестве варианта осуществления настоящего изобретения. Аппарат 10 транспортировки включает в себя путь 12 транспортировки, протягивающийся в направлении W транспортировки к месту назначения (например, самолету в ожидании посадки). Путь 12 транспортировки состоит из секций 21, 23, 25, 27 и 29 транспортировки.
Из секций 21, 23, 25, 27 и 29 транспортировки расположенная выше по потоку низкоскоростная секция 21, служащая в качестве секции транспортировки с постоянной скоростью для транспортировки с постоянной скоростью, располагается на самом верхнем краю на фиг. 1. Кроме того, секции 23a, 23b и 23c транспортировки с переменной скоростью предусматриваются ниже по потоку от расположенной выше по потоку низкоскоростной секции 21 с тем, чтобы изменять скорость транспортировки. Секции 23a, 23b и 23c транспортировки с переменной скоростью (впоследствии называемые первой секцией 23a ускорения, второй секцией 23b ускорения и третьей секцией 23c ускорения со стороны выше по потоку) располагаются последовательно, чтобы составлять секцию 23 ускорения (секцию части ускорения/замедления). Высокоскоростная секция 25 располагается ниже по потоку от секции 23 ускорения в качестве секции транспортировки с постоянной скоростью для транспортировки с постоянной скоростью, более высокой, чем скорость расположенной выше по потоку низкоскоростной секции 21.
Кроме того, секции 27a, 27b и 27c транспортировки с переменной скоростью (последовательно называемые, первой секцией 27a замедления, второй секцией 27b замедления и третьей секцией 27 замедления со стороны выше по потоку), которые могут изменять скорость транспортировки, располагаются последовательно ниже по потоку от высокоскоростной секции 25 с тем, чтобы составлять секцию 27 замедления (часть ускорения/замедления). Расположенная ниже по потоку низкоскоростная секция 29 предусматривается ниже по потоку от секции 27 замедления в качестве секции транспортировки с постоянной скоростью для транспортировки с постоянной скоростью, более низкой, чем скорость высокоскоростной секции 25.
Вышеупомянутые расположенная выше по потоку низкоскоростная секция 21, высокоскоростная секция 25 и расположенная ниже по потоку низкоскоростная секция 29, каждая, включают в себя ленточный транспортер и приводятся в движение, чтобы транспортировать предметы с предварительно определенной постоянной скоростью посредством моторов 31, 35 и 39, служащих в качестве источников привода.
[0016] Секция 23 ускорения и секция 27 замедления также включают в себя ленточные конвейеры. В секциях 23a, 23b, 23c, 27a, 27b и 27c транспортировки с переменной скоростью, включенных секцию 23 ускорения и секцию 27 замедления, ленточные транспортеры приводятся в движение посредством моторов 33a, 33b, 33c, 37a, 37b и 37c, соответственно. Скорости транспортировки ленточных конвейеров могут изменяться посредством управления вращениями соответствующих связанных моторов.
Исходная скорость задается для ленточных конвейеров секции 23 ускорения и секции 27 замедления. Когда объекты транспортировки не транспортируются, ленточные конвейеры работают с постоянной исходной скоростью, заданной для ленточных конвейеров.
Моторы 31, 35 и 39 и моторы 33a, 33b, 33c, 37a, 37b и 37c связываются с контроллером 70, который будет описывается позже, через проводные или беспроводные соединения (кабельное соединение через интерфейсную схему или электромагнитные соединения). Контроллер 70 управляет действиями устройства в аппарате 10 транспортировки.
[0017] [Лоток транспортера]
Объект 50 транспортировки (например, отдельный предмет багажа), который должен быть транспортирован в аппарате 10 транспортировки, транспортируется через секции транспортировки, в то же время будучи помещенным на верхнюю поверхность лотка 52 транспортера, который служит в качестве контейнера, который должен транспортироваться, который транспортируется по ленточным транспортерам. Другими словами, объект 50 транспортировки транспортируется, в то же время находясь в контейнере, который должен транспортироваться. Как показано на фиг. 2, лоток 52 транспортера имеет фрагмент 52a перевернутого конуса на дне, где размеры в направлении W транспортировки расширяются вверх от дна. Таким образом, нижняя часть лотка 52 транспортера имеет форму, похожую на перевернутую трапецию в виде сбоку. Верхняя поверхность лотка 52 транспортера, несущая объект 50 транспортировки, больше среднего размера объекта 50 транспортировки, с тем, чтобы хранить объект 50 транспортировки различных размеров. На фиг. 2 верхняя поверхность лотка 52 транспортера почти вдвое больше среднего размера объекта 50 транспортировки в направлении W транспортировки (отметим, что весь объект 50 транспортировки на фиг. 2 имеет средний размер, но большой объект 50 транспортировки, почти такой же большой, что и верхняя поверхность лотка 52 транспортера, может транспортироваться в некоторых случаях). Кроме того, внешний край верхней поверхности лотка 52 транспортировки, в частности, в направлении W транспортировки, имеет концевой выступ 52b, который протягивается слегка выше поверхности установки для объекта 50 транспортировки для того, чтобы предохранять объект 50 транспортировки от соскальзывания с верхней поверхности лотка 52 транспортера.
[0018] [Датчик прибытия]
Например, во множестве предварительно определенных позиций (например, исходных позициях ускорения/замедления), заданных на пути 12 транспортировки, предусматривается датчик, чтобы обнаруживать прибытие объекта 50 транспортировки (лотка 52 транспортера, несущего объект 50 транспортировки) на позиции. В настоящем варианте осуществления такой датчик предусматривается для каждой из секций транспортировки. Например, датчики 63a, 63b и 63c прибытия, каждый из которых включает в себя фотоотражатель и фотоэлектрический датчик, такой как фотоэлектрический датчик багажа (PHS), располагаются практически выше по потоку от нижних по потоку концов секций 23a, 23b и 23c ускорения секции 23 ускорения. Расположенная выше по потоку низкоскоростная секция 21 транспортировки, высокоскоростная секция 25, секция 27 замедления и расположенная ниже по потоку низкоскоростная секция 29 также включают в себя датчики 61, 65, 67a, 67b, 67c и 69 прибытия в предварительно определенных позициях.
В конкретном способе установки датчиков прибытия, например, фотоотражатель может быть расположен на пьедестале, присоединенном к боку ленточного конвейера, так что свет излучается на транспортируемый лоток 52 транспортера. Установка датчиков прибытия не ограничивается, пока прибытие объекта 50 транспортировки в конкретную позицию может быть обнаружено.
Датчики 61, 63a, 63b, 63c, 65, 67a, 67b, 67c и 69 прибытия передают сигналы, указывающие результаты обнаружения, контроллеру 70, который будет описан позже, через проводные или беспроводные соединения.
[0019] [Датчик веса]
Секции 21, 23a, 23b, 23c, 25, 27a, 27b, 27c и 29 транспортировки включают в себя датчики 81, 83a, 83b, 83c, 85, 87a, 87b, 87c и 89 веса для обнаружения веса объекта, транспортируемого в секциях транспортировки. Например, датчики веса могут быть измерительными датчиками, расположенными под поверхностями транспортировки секций транспортировки.
Датчики 81, 83a, 83b, 83c, 85, 87a, 87b, 87c и 89 веса передают сигналы, указывающие результаты обнаружения, контроллеру 70, который будет описан позже, через проводные или беспроводные соединения.
[0020] [Контроллер]
Контроллер 70 может определять состояние в аппарате 10 транспортировки в ответ на сигналы, принимаемые от устройств, связывающихся с контроллером 70, и данные, вводимые пользователем, и может управлять действиями устройств в аппарате 10 транспортировки. Например, контроллер 70 может включать в себя процессор или компьютер, который выполняет программу для определения того, какие данные должны быть выведены в ответ на введенные данные (каким образом различные устройства должны быть задействованы), или PLC, который предварительно определяет, какие операции выполняются при каких условиях. В настоящем варианте осуществления контроллер 70 является компьютером, установленным удаленно относительно пути 12 транспортировки.
В настоящем варианте осуществления, как показано на фиг. 3, контроллер 70 соединяется так, чтобы связываться с датчиками 61, 63a, 63b, 63c, 65, 67a, 67b, 67c и 69 прибытия, датчиками 81, 83a, 83b, 83c, 85, 87a, 87b, 87c и 89 веса и моторами 31, 33a, 33b, 33c, 35, 37a, 37b, 37b и 39 через проводные или беспроводные соединения.
Контроллер 70 может определять, достиг ли объект 50 транспортировки (лоток 52 транспортера, несущий объект 50 транспортировки) исходных позиций ускорения/замедления на пути 12 транспортировки или нет, на основе сигналов от датчиков 61, 63a, 63b, 63c, 65, 67a, 67b, 67c и 69 прибытия.
Кроме того, контроллер 70 может определять завершение переноса, в частности, был ли объект 50 транспортировки полностью перенесен на секции транспортировки (без нахождения между секциями транспортировки) или нет, на основе увеличения или уменьшения веса, обнаруживаемого посредством датчиков 81, 83a, 83b, 83c, 85, 87a, 87b, 87c и 89 веса. В частности, в то время как вес, обнаруживаемый посредством датчика веса, увеличивается, контроллер 70 может определять, что объект 50 транспортировки переносится в секцию транспортировки, соответствующую датчику веса. Если обнаруженный вес прекращает увеличиваться, контроллер 70 может определять, что объект 50 транспортировки был полностью перенесен в секцию транспортировки. В то время как обнаруженный вес уменьшается, контроллер 70 может определять, что объект 50 транспортировки переносится с соответствующей секции транспортировки на расположенную ниже по потоку секцию транспортировки.
Контроллер 70 управляет вращениями моторов 33a, 33b, 33c, 37a, 37b и 37c так, чтобы регулировать скорости транспортировки ленточных конвейеров в секциях 23a, 23b, 23c, 27a, 27b и 27c транспортировки с переменной скоростью. Кроме того, контроллер 70 может распознавать текущие скорости транспортировки в секциях транспортировки с переменной скоростью на основе состояний вращения моторов. Кроме того, контроллер 70 может останавливать все моторы 31, 33a, 33b, 33c, 35, 37a, 37b, 37c и 39 с тем, чтобы приостанавливать транспортировку в случае аварийной ситуации, например, отказа аппарата 10 транспортировки.
[0021] [Транспортировка предмета]
То, как объект 50 транспортировки на пути 12 транспортировки транспортируется, будет описано ниже.
Сначала, объект 50 транспортировки (например, багаж) принимается в местоположении для приема объекта транспортировки. В этот момент оператор объекта 50 транспортировки помещает объект 50 транспортировки на верхнюю поверхность лотка 52 транспортера, транспортируемого в расположенной выше по потоку низкоскоростной секции 21, продолжающейся до местоположения для приема объекта транспортировки, вводит объект 50 транспортировки на путь 12 транспортировки. Альтернативно, объект 50 транспортировки автоматически помещается в лоток 52 транспортера посредством автоматического устройства перемещения и затем вводится на путь 12 транспортировки.
[0022] <Перенос с расположенной выше по потоку низкоскоростной секции на первую секцию ускорения>
Исходная скорость для скорости транспортировки в первой секции 23a ускорения секции 23 ускорения, расположенной ниже по потоку от верхней по потоку низкоскоростной секции 21, равна скорости транспортировки верхней по потоку низкоскоростной секции 21. В частности, когда объект 50 транспортировки не располагается в первой секции 23a ускорения, скорость транспортировки поддерживается равной (ускорение равно 0) скорости расположенной выше по потоку низкоскоростной секции 21 (например, 72 м/мин). Таким образом, лоток 52 транспортера и объект 50 транспортировки, которые достигли нижнего по потоку конца расположенной выше по потоку низкоскоростной секции 21, могут быть перенесены на первую секцию 23a ускорения без быстрого изменения скорости или ускорения.
[0023] <Управление переносом с первой секции ускорения на вторую секцию ускорения>
Объект 50 транспортировки, перенесенный на первую секцию 23a ускорения, транспортируется с той же постоянной скоростью, что и скорость расположенной выше по потоку низкоскоростной секции 21, в течение некоторого времени. Когда датчик 63a прибытия обнаруживает, что объект 50 транспортировки достиг предварительно определенной позиции рядом с нижним по потоку концом первой секции 23a ускорения (исходные позиции ускорения/замедления, соответствующие первой секции 23a ускорения и второй секции 23b ускорения), контроллер 70 начинает управление переносом для переноса объекта 50 транспортировки с первой секции 23a ускорения секции 23 ускорения (расположенной выше по потоку секции транспортировки с переменной скоростью) на вторую секцию 23b ускорения (расположенную ниже по потоку секцию транспортировки с переменной скоростью).
Вторая секция 23b ускорения имеет ту же исходную скорость, что и первая секция 23a ускорения. В частности, когда объект 50 транспортировки не находится во второй секции 23b ускорения, вторая секция 23b ускорения работает с той же скоростью транспортировки, что и расположенная выше по потоку низкоскоростная секция 21. В этом случае, в начале управления переносом для переноса на вторую секцию 23b транспортировки, контроллер 70 начинает ускорение в первой секции 23a ускорения и второй секции 23b ускорения с одинаковым постоянным ускорением переноса (например, 1,96 м/с2, см. графики 1 и 2 на фиг. 4). Вследствие ускорения в первой секции 23a ускорения и второй секции 23b ускорения с одинаковой исходной скорости с одинаковым ускорением переноса, лоток 52 транспортера и объект 50 транспортировки, прибывающие на нижний по потоку конец первой секции 23a ускорения, могут быть перенесены на вторую секцию 23b ускорения без быстрого изменения скорости и ускорения. В частности, в изменении скорости на фиг. 4, объект 50 транспортировки переносится выше по потоку и ниже по потоку с одинаковой скоростью транспортировки и ускорением транспортировки, поддерживаемым равным 1,96 м/с2 (0,2 G). Кроме того, в начале ускорения в первой секции 23a ускорения, ускорение предпочтительно увеличивается постепенно до ускорения переноса для того, чтобы избегать толчка, прикладываемого к объекту 50 транспортировки посредством быстрого изменения ускорения. Ради упрощения, постепенное изменение ускорения пропущено на фиг. 4.
[0024] <Управление восстановлением скорости первой секции ускорения>
Когда контроллер 70 определяет, что объект 50 транспортировки, транспортированный в первой секции 23a транспортировки, был полностью перенесен на вторую секцию 23b ускорения, на основе веса, определенного посредством датчика 83a веса первой секции 23a ускорения или датчика 83b веса второй секции 23b ускорения, контроллер 70 начинает управление восстановлением скорости для возвращения скорости транспортировки первой секции 23a ускорения к исходной скорости (на фиг. 4 скорость транспортировки равна 190 м/мин вверх по потоку и вниз по потоку в начале управления восстановлением скорости).
Когда управление восстановлением скорости для первой секции 23a ускорения начинается, контроллер 70 инструктирует первой секции 23a ускорения выполнять замедление с замедлением восстановления (например, 0,6 G=5,88 м/с2), имеющим большее абсолютное значение, чем вышеописанное ускорение переноса. Таким образом, скорость транспортировки первой секции 23a ускорения может быть возвращена к исходной скорости в более короткое время, чем период управления переносом (см. график на фиг. 4). Когда скорость транспортировки первой секции 23a ускорения возвращается к исходной скорости, контроллер 70 завершает управление восстановлением скорости и эксплуатирует первую секцию 23a ускорения с постоянной исходной скоростью (той же скоростью, что и скорость транспортировки расположенной выше по потоку низкоскоростной секции 21).
[0025] <Управление переносом со второй секции ускорения на третью секцию ускорения>
Объект 50 транспортировки, перенесенный во вторую секцию 23b ускорения, продолжает транспортироваться по второй секции 23b ускорения, в то же время ускоряясь с ускорением переноса. Когда датчик 63a прибытия обнаруживает, что объект 50 транспортировки достиг предварительно определенной позиции (исходной позиции ускорения/замедления, соответствующей третьей секции 23c ускорения) рядом с нижним по потоку концом второй секции 23b ускорения, контроллер 70 начинает управление переносом для подготовки к приему объекта 50 транспортировки со второй секции 23b ускорения (расположенной выше по потоку секции транспортировки с переменной скоростью) на третью секцию 23c транспортировки (расположенную ниже по потоку секцию транспортировки с переменной скоростью) секции 23 ускорения.
Третья секция 23c ускорения работает с исходной скоростью, пока объект 50 транспортировки не находится в третьей секции 23c ускорения. Исходная скорость третьей секции 23c ускорения задается равной скорости транспортировки второй секции 23b ускорения, когда объект 50 транспортировки достигает позиции датчика 63a прибытия (т.е. исходной позиции ускорения/замедления, соответствующей третьей секции 23c ускорения) во второй секции 23b ускорения. Исходная скорость третьей секции 23c ускорения может быть определена заранее согласно длине/исходной скорости/ускорению переноса второй секции 23b ускорения (например, 260 м/мин).
В начале управления переносом для третьей секции 23c ускорения контроллер 70 начинает ускорение третьей секции 23c ускорения с ускорением переноса (например, 1,96 м/с2); между тем, контроллер 70 продолжает ускорение второй секции 23b ускорения с ускорением переноса (см. графики 2 и 3 на фиг. 4). Вышеописанная настройка исходной скорости третьей секции 23c ускорения предоставляет возможность расположенной выше по потоку второй секции 23b ускорения и расположенной ниже по потоку третьей секции 23c ускорения транспортироваться с одинаковой скоростью в начале управления переносом для третьей скорости 23c ускорения. Вследствие обоих ускорений вверх по потоку и вниз по потоку с одинаковым ускорением переноса от одинаковой скорости транспортировки лоток 52 транспортера и объект 50 транспортировки, прибывающие на нижний по потоку конец второй секции 23b ускорения, могут быть перенесены на третью секцию 23c ускорения без быстрого изменения скорости и ускорения. В частности, в изменении скорости на фиг. 4, объект 50 транспортировки переносится выше по потоку и ниже по потоку с одинаковой скоростью транспортировки и ускорением транспортировки, поддерживаемым равным 1,96 м/с2 (0,2 G).
[0026] <Управление восстановлением скорости второй секции ускорения>
Когда контроллер 70 определяет, что объект 50 транспортировки, транспортированный во второй секции 23b транспортировки, был полностью перенесен на третью секцию 23c ускорения, на основе веса, определенного посредством датчика 83b веса второй секции 23b ускорения или датчика 83c веса третьей секции 23c ускорения, контроллер 70 начинает управление восстановлением скорости для возвращения скорости транспортировки второй секции 23b ускорения к исходной скорости (на фиг. 4 скорость транспортировки равна 350 м/мин вверх по потоку и вниз по потоку в начале управления восстановлением скорости).
В управлении восстановлением скорости для второй секции 23b ускорения контроллер 70 предоставляет возможность замедления второй секции 23b ускорения с замедлением восстановления (например, 5,88 м/с2), как и в управлении восстановлением скорости для первой секции 23a ускорения, немедленно возвращает скорость транспортировки к исходной скорости и затем эксплуатирует вторую секцию 23b ускорения с постоянной исходной скоростью (такой же скоростью, что и скорость транспортировки расположенной выше по потоку низкоскоростной секции 21, см. график 2 на фиг. 4).
[0027] <Перенос с третьей секции ускорения на высокоскоростную секцию>
Для третьей секции 23c ускорения (в частности, секции транспортировки с переменной скоростью, ближайшей к высокоскоростной секции 25, служащей в качестве нижней по потоку секции транспортировки с постоянной скоростью) целевая скорость задается в качестве конечной скорости транспортировки. В частности, та же скорость, что и скорость транспортировки (например, 600 м/мин) высокоскоростной секции 25, задается в качестве целевой скорости. Когда скорость транспортировки третьей секции 23c ускорения достигает целевой скорости, контроллер 70 завершает ускорение третьей секции 23c ускорения и эксплуатирует третью секцию 23c ускорения с постоянной целевой скоростью (т.е. той же скоростью транспортировки, что и высокоскоростная часть, см. график 3 на фиг. 4). При завершении ускорения, ускорение предпочтительно уменьшается постепенно до 0 для того, чтобы избегать толчка, прикладываемого к объекту 50 транспортировки посредством быстрого изменения ускорения. Кроме того, исходная скорость, целевая скорость, ускорение переноса и длина третьей секции 23c ускорения желательно задаются правильным образом, так что скорость транспортировки может достигать целевой скорости, пока объект 50 транспортировки не прибудет на нижний по потоку конец третьей секции 23c ускорения.
Третья секция 23c ускорения (расположенная выше по потоку секция транспортировки), прибывающая с целевой скоростью, эксплуатируется с той же постоянной скоростью транспортировки, что и высокоскоростная секция 25 (расположенная ниже по потоку секция транспортировки). Таким образом, лоток 52 транспортера и объект 50 транспортировки, прибывающие на нижний по потоку конец третьей секции 23c ускорения (т.е. нижний по потоку конец секции 23 ускорения), могут быть перенесены на высокоскоростную секцию 25 без быстрого изменения скорости и ускорения.
Управление переносом для первой, второй и третьей секций 23a, 23b и 23c ускорения, составляющих секцию 23 ускорения, непрерывно увеличивает скорость транспортировки объекта 50 транспортировки, в то время как объект 50 транспортировки проходит через секцию 23 ускорения, со скорости транспортировки расположенной выше по потоку низкоскоростной секции 21 (расположенной выше по потоку секции транспортировки с постоянной скоростью) до скорости транспортировки высокоскоростной секции 25 (расположенной ниже по потоку секции транспортировки с постоянной скоростью).
[0028] <Управление восстановлением скорости третьей секции ускорения>
Когда контроллер 70 определяет, что объект 50 транспортировки, транспортировавшийся в третьей секции 23c ускорения, был полностью перенесен на высокоскоростную секцию 25, на основе веса, обнаруженного посредством датчика 83c веса третьей секции 23c ускорения или датчика 85 веса высокоскоростной секции 25, контроллер 70 начинает управление восстановлением скорости для возвращения скорости транспортировки третьей секции 23c ускорения к исходной скорости.
В управлении восстановлением скорости для третьей секции 23c ускорения контроллер 70 предоставляет возможность замедления третьей секции 23c ускорения с замедлением восстановления с тем, чтобы немедленно возвращать скорость транспортировки к исходной скорости, как в управлении восстановлением скорости для второй секции 23b ускорения, и затем контроллер 70 эксплуатирует третью секцию 23c ускорения с постоянной исходной скоростью (см. график 3 на фиг. 4). Однако, в отличие от первой и второй секций 23a и 23b ускорения, исходная скорость в третьей секции 23c ускорения не равна скорости транспортировки расположенной выше по потоку низкоскоростной секции 21. Таким образом, скорость транспортировки третьей секции 23c ускорения приближается к скорости транспортировки расположенной выше по потоку низкоскоростной секции 21 в управлении восстановлением скорости, но не уменьшается до того же значения.
[0029] <Перенос предмета, который должен транспортироваться, управление переносом и управление восстановлением скорости в секции замедления>
Также в первой, второй и третьей секциях 27a, 27b и 27c замедления, включенных в секцию 27 замедления, управление переносом и управление восстановлением скорости выполняются как в секции 23 ускорения перед и после переноса объекта 50 транспортировки между секциями транспортировки. Однако, секция 27 замедления испытывает замедление в управлении переносом и ускорение в управлении восстановлением скорости (см. графики 4, 5 и 6 на фиг. 4). Замедление переноса и ускорение восстановления секции 27 замедления могут иметь те же абсолютные значения, что и значения секции 23 ускорения. В секции 27 замедления, однако, знаки ускорения и замедления для секции 23 ускорения меняются на противоположные для секции 27 замедления. Таким образом, замедление переноса является изменением замедления (отрицательное значение), а ускорение восстановления является изменением ускорения (положительное значение). Исходные скорости первой и второй секций 27a и 27b замедления задаются равными скорости транспортировки высокоскоростной секции 25. Кроме того, целевая скорость третьей секции 27c замедления задается равной скорости расположенной ниже по потоку низкоскоростной секции 29.
Управление переносом секций замедления в секции 27 замедления непрерывно уменьшает скорость транспортировки объекта 50 транспортировки, в то время как объект 50 транспортировки проходит через секцию 27 замедления, со скорости транспортировки высокоскоростной секции 25 (расположенной выше по потоку секции транспортировки с постоянной скоростью) до скорости транспортировки расположенной ниже по потоку низкоскоростной секции 29 (расположенной ниже по потоку секции транспортировки с постоянной скоростью).
Расположенная ниже по потоку низкоскоростная секция 29 соединяется с местом назначения (например, погрузочной областью рядом с ожидающим самолетом), предоставляя возможность объекту 50 транспортировки, перенесенному на расположенную ниже по потоку низкоскоростную секцию 29, отправляться к месту назначения.
[0030] [Действия секций транспортировки с переменной скоростью, включенных в секцию ускорения и секцию замедления]
Что касается действий секций 23a, 23b и 23c транспортировки с переменной скоростью секции 23 ускорения и секций 27a, 27b и 27c транспортировки с переменной скоростью секции 27 замедления, блок-схема последовательности операций на фиг. 5 показывает результат фокусирования на действиях одной из секций транспортировки с переменной скоростью.
Например, результат фокусирования на действия третьей секции 27c замедления будет обсужден ниже. На этапе S1 на фиг. 5 третья секция 27c замедления (секция транспортировки с переменной скоростью) работает с постоянной исходной скоростью (например, 300 м/мин). На основе сигнала датчика 67b прибытия, предусмотренного в исходной позиции ускорения/замедления, контроллер 70 периодически (например, каждые 20 мс) удостоверяется, достиг ли объект 50 транспортировки исходной позиции ускорения/замедления (в этом случае рядом с нижним по потоку концом второй секции 27b замедления), соответствующей третьей секции 27c замедления (этап S2). Если объект 50 транспортировки не достиг исходной позиции ускорения/замедления, работа с постоянной скоростью продолжается.
Если объект 50 транспортировки достигает исходной позиции ускорения/замедления, управление переносом третьей секции 27c замедления начинается (этап S3). В управлении переносом скорость транспортировки третьей секции 27c замедления уменьшается с замедлением переноса (например, 1,96 м/с2).
Во время управления переносом подтверждается, является ли секция транспортировки с переменной скоростью секцией транспортировки с переменной скоростью (конечной секцией ускорения/замедления), ближайшей к расположенной ниже по потоку секции транспортировки с постоянной скоростью (в этом случае, расположенной ниже по потоку низкоскоростной секции 29) (этап S4). Если секция транспортировки с переменной скоростью в управлении переносом не является конечной секцией ускорения/замедления, контроллер 70 продолжает ускорение/замедление до начала управления восстановлением скорости, которое будет обсуждено позже (переходит к этапу S7). Поскольку третья секция 27c замедления является конечной секцией ускорения/замедления, процесс переходит к этапу S5, чтобы подтверждать, достигла ли скорость транспортировки целевой скорости (например, 72 м/мин) или нет, на основе числа оборотов мотора 89.
Если скорость транспортировки третьей секции 27c замедления достигает целевой скорости, контроллер 70 приостанавливает замедление и эксплуатирует третью секцию 27c замедления с постоянной целевой скоростью (этап S6). Если замедление быстро не изменяется до 0, а постепенно изменяется до 0, целевая скорость, подтвержденная на этапе S5, может быть задана в значение, близкое к желаемой конечной скорости, и затем скорость транспортировки может управляться, чтобы достигать желаемой конечной скорости, когда ускорение постепенно изменяется до 0.
Во время управления переносом, и после того как скорость транспортировки достигает целевой скорости, чтобы переключаться на работу с постоянной скоростью, определяется, был ли объект 50 транспортировки перенесен с третьей секции 27c замедления (целевой секции транспортировки с переменной скоростью) на расположенную ниже по потоку низкоскоростную секцию 29 (расположенную ниже по потоку секцию транспортировки), на основе сигнала датчика 87c веса или датчика 89 веса (этап S7).
Если объект 50 транспортировки переносится на расположенную ниже по потоку низкоскоростную секцию 29, управление восстановлением скорости третьей секции 27c замедления начинается (этап S8). В управлении восстановлением скорости скорость транспортировки третьей секции 27c замедления ускоряется с ускорением восстановления (например, 5,88 м/с2).
На следующем этапе S9 подтверждается, вернулась ли скорость транспортировки третьей секции 27c замедления к исходной секции. Если скорость транспортировки вернулась к исходной скорости, третья секция 27c замедления работает с постоянной исходной скоростью (возврат к этапу S1).
[0031] Третья секция 27c замедления была описана в качестве примера. Другие секции транспортировки с переменной скоростью, в основном, управляются таким же образом, что и третья секция 27c замедления, за исключением настроек исходной скорости и исходных позиций ускорения/замедления. Таким образом, что касается всех секций транспортировки, скорость транспортировки и ускорение/замедление транспортировки управляются, чтобы быть идентичными между расположенной выше по потоку секцией транспортировки и расположенной ниже по потоку секцией транспортировки, когда объект 50 транспортировки переносится с расположенной выше по потоку секции транспортировки на расположенную ниже по потоку секцию его транспортировки (по меньшей мере, одна из секций транспортировки является секцией транспортировки с переменной скоростью или секцией транспортировки с постоянной скоростью). В секции транспортировки с переменной скоростью, с которой объект транспортировки был перенесен ниже по потоку, скорость транспортировки немедленно возвращается к исходной скорости.
[0032] В вышеописанном способе транспортировки аппарата транспортировки согласно настоящему варианту осуществления скорость транспортировки и ускорение/замедление транспортировки управляются, чтобы быть идентичными между расположенной выше по потоку и расположенной ниже по потоку секциями транспортировки, когда объект 50 транспортировки переносится между двумя секциями транспортировки. Таким образом, скорость и ускорение/замедление объекта 50 транспортировки быстро не изменяются, предохраняя объект 50 транспортировки от соскальзывания или получения толчка на лотке 52 транспортера. Кроме того, это предохраняет лоток 52 транспортера от проскальзывания на ленточных транспортерах, так, чтобы предотвращать истирание лент ленточных транспортеров, составляющих секции транспортировки, или лотка 52 транспортера, используемого для транспортировки.
Кроме того, ленточные транспортеры, используемые в аппарате транспортировки согласно настоящему варианту осуществления, являются коммерчески доступными и, таким образом, составляют аппарат транспортировки с гарантированными результатами работы и высокой надежностью.
В секции 23 ускорения и секции 27 замедления (секциях ускорения/замедления) скорость транспортировки объекта 50 транспортировки (лотка 52 транспортера, несущего объект 50 транспортировки) непрерывно ускоряется или замедляется. Таким образом, скорость транспортировки объекта 50 транспортировки может достигать целевой скорости посредством ускорения/замедления (скорость транспортировки высокоскоростной секции 25 используется для секции 23 ускорения, в то время как скорость транспортировки расположенной ниже по потоку низкоскоростной секции 29 используется для секции 27 замедления) в короткое время на коротком расстоянии. Это может сокращать протяженности секции 23 ускорения и секции 27 замедления. Соответственно секции транспортировки с постоянной скоростью (расположенная ниже по потоку низкоскоростная секция 21, высокоскоростная секция 25 и расположенная ниже по потоку низкоскоростная секция 29) могут, по большей части, охватывать всю протяженность пути 12 транспортировки. Большая доля секций транспортировки с постоянной скоростью с простыми механизмами для транспортировки с постоянной скоростью может сдерживать затраты на установку и эксплуатацию всего пути 12 транспортировки.
[0033] Каждая из секции 23 ускорения и секции 27 замедления (секции ускорения/замедления) включает в себя множество (три) секций транспортировки с переменной скоростью. Даже когда объект 50 транспортировки транспортируется в секциях ускорения/замедления, секция с переменной скоростью на самом верхнем по потоку конце (первая секция 23a ускорения или первая секция 27a замедления) может возвращать скорость транспортировки к скорости соседней секции транспортировки с постоянной скоростью (расположенная выше по потоку низкоскоростная секция 21 или высокоскоростная секция 25), после того как объект 50 транспортировки транспортируется вниз по потоку (вторая секция 23b ускорения или вторая секция 27b замедления). Таким образом, объект 50 транспортировки может быть транспортирован в секцию ускорения/замедления перед завершением транспортировки посредством секции ускорения/замедления, приводя к высокой эффективности транспортировки. Кроме того, абсолютное значение ускорения/замедления восстановления задается больше ускорения/замедления переноса, предоставляя возможность секциям транспортировки с переменной скоростью немедленно возвращаться к исходной скорости, после того как объект 50 транспортировки транспортируется вниз по потоку. Таким образом, секции транспортировки с переменной скоростью могут быстрее принимать следующий предмет 50 (с той же скоростью, что и скорость транспортировки соседней секции транспортировки с постоянной скоростью), улучшая эффективность транспортировки.
[0034] Если объект 50 транспортировки является пассажирским багажом самолета в настоящем варианте осуществления, объекты 50 транспортировки различных форм и размеров транспортируются посредством ленточных транспортеров, в то же время будучи погруженными (хранящимися) на лотках 52 транспортера, имеющих идентичные формы. Таким образом, различные настройки исходных позиций ускорения/замедления могут быть определены заранее согласно форме лотка 52 транспортера, тем самым, упрощая проектирование аппарата 10 транспортировки. Кроме того, фрагмент 52a в виде перевернутого конуса на дне лотка 52 транспортера вынуждает нижнюю часть лотка 52 транспортера иметь меньшие размеры, чем верхняя часть лотка 52 транспортера в направлении W транспортировки. Верхняя часть лотка 52 транспортера должна быть спроектирована настолько большой, насколько, как предполагается, будет максимальный размер объекта 50 транспортировки, с тем, чтобы хранить объект 50 транспортировки различных форм и предотвращать соскальзывание объекта 50 транспортировки, тогда как нижняя часть в непосредственном соприкосновении с ленточным транспортером может иметь меньший размер, чем объект 50 транспортировки. Таким образом, как показано на фиг. 2, даже когда верхняя часть лотка 52 транспортера все еще находится в диапазоне расположенной выше по потоку секции транспортировки (в этом случае первой секции 23a ускорения), нижняя часть лотка 52 транспортера полностью находится на ленточном транспортере расположенной ниже по потоку секции транспортировки (в этом случае второй секции 23b ускорения), так, чтобы полностью поддерживать веса лотка 52 транспортера и объекта 50 транспортировки на ленточном транспортере второй секции 23b ускорения. Это предоставляет возможность контролеру 70 быстрее определять "завершение переноса" на основе сигнала обнаружения датчика 83a веса или датчика 83b веса. Таким образом, управление восстановлением скорости может начинаться раньше, и секция транспортировки с переменной скоростью может быстрее возвращаться к исходной скорости, предоставляя возможность секции ускорения/замедления непосредственно принимать следующий предмет 50. Таким образом, эффективность транспортировки может быть улучшена.
[0035] В вышеописанном настоящем варианте осуществления каждая из секции 23 ускорения и секции 27 замедления (секция ускорения/замедления) включает в себя три секции транспортировки с переменной скоростью. Число секций транспортировки с переменной скоростью особым образом не ограничивается, и, таким образом, каждая из секций ускорения/замедления может включать в себя две или, по меньшей мере, четыре секции транспортировки с переменной скоростью. Исходная скорость и исходная позиция ускорения/замедления для секций транспортировки с переменной скоростью могут быть заданы так, что скорость транспортировки и ускорение/замедление транспортировки могут управляться, чтобы быть идентичными между расположенной выше по потоку и расположенной ниже по потоку секциями транспортировки, когда объект 50 транспортировки переносится между секциями транспортировки.
В вышеописанном настоящем варианте осуществления секции ускорения/замедления являются секцией 23 ускорения и секцией 27 замедления. Только одна из секций может быть предусмотрена в зависимости от особенностей работы, требуемых для аппарата 10 транспортировки. Например, если объект 50 транспортировки может транспортироваться к месту назначения с высокой скоростью транспортировки в высокоскоростной секции 25, путь 12 транспортировки может включать в себя секции от расположенной выше по потоку низкоскоростной секции 21 до высокоскоростной секции 25. Может быть предусмотрена только секция 23 ускорения без секции 27 замедления. Альтернативно, если объект 50 транспортировки должен транспортироваться с низкой скоростью рядом с местом назначения, но может транспортироваться с высокой скоростью в местоположении для погрузки объекта 50 транспортировки, путь 12 транспортировки может включать в себя секции от высокоскоростной секции 25 до расположенной ниже по потоку низкоскоростной секции 29. Может быть предусмотрена только секция 27 замедления без секции 23 ускорения.
[0036] В настоящем варианте осуществления исходные позиции ускорения/замедления первой секции 23a ускорения и второй секции 23b ускорения располагаются рядом с нижним по потоку концом первой секции 23a ускорения, в то время как исходная позиция ускорения/замедления третьей секции 23c ускорения находится рядом с нижним по потоку концом второй секции 23b ускорения. Настройка исходной позиции ускорения/замедления не ограничивается. Исходная позиция ускорения/замедления первой секции 23a ускорения может быть расположена в позиции, отличной от позиции второй секции 23b ускорения. Например, исходная скорость второй секции 23b ускорения может быть задана выше исходной скорости первой секции 23a ускорения, а исходная позиция ускорения/замедления второй секции 23b ускорения может быть задана, чтобы быть позицией в первой секции 23a ускорения, где скорость транспортировки объекта 50 транспортировки, который транспортируется, в то же время ускоряясь в первой секции 23a ускорения, достигает исходной скорости второй секции 23b ускорения. Исходные позиции ускорения/замедления первой, второй и третьей секций 23a, 23b и 23c ускорения, все могут быть расположены в одной и той же позиции рядом с нижним по потоку концом первой секции 23a ускорения и иметь одинаковую исходную скорость. Когда объект 50 транспортировки достигает исходной позиции ускорения/замедления рядом с нижним по потоку концом первой секции 23a ускорения, ускорение первой, второй и третьей секций 23a, 23b и 23c ускорения может начинаться с одинаковым ускорением переноса. Когда объект 50 транспортировки переносится между секциями транспортировки, скорость транспортировки и ускорение/замедление могут управляться, чтобы быть идентичными между расположенной выше по потоку и расположенной ниже по потоку секциями независимо от настроек исходной скорости, исходной позиции ускорения/замедления и ускорения/замедления переноса. Числовые значения исходной скорости и ускорение/замедление переноса являются просто примерными в настоящем варианте осуществления, и, таким образом, конкретные числовые значения могут быть необязательно заданы, принимая во внимание факторы, включающие в себя необходимые элементы для правильного управления переносом, число транспортеров, установленных в аппарате, протяженности транспортеров, требуемое время переноса и безопасность. Например, ускорение/замедление переноса может быть равным 0,3 G (2,94 м/с2), а ускорение/замедление восстановления может быть равным 0,9 G (8,82 м/с2). Альтернативно, ускорение/замедление переноса может быть равным 0,4 G (3,94 м/с2), а ускорение/замедление восстановления может быть равным 1,2 G (11,76 м/с2).
В вышеописанном настоящем варианте осуществления позиции ускорения/замедления, обе, находятся в секции 23 ускорения или секции 27 замедления. Позиции ускорения/замедления могут находиться в секциях транспортировки с постоянной скоростью, включающих в себя расположенную выше по потоку низкоскоростную секцию 21 и высокоскоростную секцию 25. Например, исходная скорость первой секции 23a ускорения может быть равной 0 или ниже, чем скорость транспортировки с постоянной скоростью в расположенной выше по потоку низкоскоростной секции 21, исходная позиция ускорения/замедления для начала ускорения первой секции 23a ускорения может быть задана в датчике 61 прибытия, предусмотренном в расположенной выше по потоку низкоскоростной секции 21, и ускорение первой секции 23a ускорения может управляться, чтобы начинаться, когда датчик 61 прибытия обнаруживает прибытие объекта 50 транспортировки. В этом случае, когда скорость транспортировки первой секции 23a ускорения достигает скорости транспортировки расположенной выше по потоку низкоскоростной секции 21, первая секция 23a ускорения может быть переключена на транспортировку с постоянной скоростью.
[0037] В вышеописанном настоящем варианте осуществления управление восстановлением скорости начинается в ответ на сигнал датчика веса. Управление восстановлением скорости может начинаться, после того как объект 50 транспортировки транспортируется ниже по потоку. Таким образом, управление восстановлением скорости может начинаться, когда датчик прибытия, предусмотренный в расположенной ниже по потоку секции транспортировки, обнаруживает прибытие объекта 50 транспортировки. Например, управление восстановлением скорости первой секции 23a ускорения может начинаться, когда датчик 63b прибытия второй секции 23b ускорения обнаруживает прибытие объекта 50 транспортировки. Альтернативно, в дополнение к исходной позиции ускорения/замедления, исходная позиция восстановления скорости для начала управления восстановлением скорости может быть задана для каждой из секций транспортировки с переменной скоростью по пути 12 транспортировки, и управление восстановлением скорости может быть выполнено на основе сигнала датчика прибытия, предусмотренного в исходной позиции восстановления скорости. Например, датчик 69 прибытия, предусмотренный в расположенной ниже по потоку низкоскоростной секции 29 на фиг. 1, может находиться в исходной позиции восстановления скорости третьей секции 27c замедления, и управление восстановлением скорости третьей секции 27c замедления может начинаться, когда датчик 69 прибытия обнаруживает прибытие объекта 50 транспортировки.
В вышеописанном настоящем варианте осуществления, когда объект 50 транспортировки достигает исходной позиции ускорения/замедления, ускорение/замедление начинается в секции транспортировки с переменной скоростью, соответствующей исходной позиции ускорения/замедления. Ускорение/замедление может начинаться относительно скорости транспортировки вместо позиции объекта 50 транспортировки. Например, во время ускорения/замедления в расположенной выше по потоку секции транспортировки с переменной скоростью ускорение/замедление может начинаться в расположенной ниже по потоку секции транспортировки с переменной скоростью, когда скорость транспортировки секции транспортировки с переменной скоростью достигает исходной скорости расположенной ниже по потоку секции транспортировки с переменной скоростью. Вместо ускорения/замедления, начинающегося непосредственно после того как объект 50 транспортировки достигает исходной позиции ускорения/замедления, таймер может быть подготовлен для измерения прошедшего времени от обнаружения объекта 50 транспортировки посредством датчика прибытия, начиная ускорение/замедление после предварительно определенного времени от обнаружения прибытия. В этом случае исходная позиция ускорения/замедления может быть отделена от соответствующей секции ускорения/замедления. Например, замедление первой и второй секций 27a и 27b замедления может начинаться, после того как период времени, требуемый для прохождения объекта 50 транспортировки через первую секцию 27a замедления, истекает после обнаружения прибытия объекта 50 транспортировки посредством датчика 65 прибытия (фиг. 1), предусмотренного рядом с нижним по потоку концом высокоскоростной секции 25. Кроме того, момент для начала управления восстановлением скорости может быть определен посредством таймера вместо непосредственного обнаружения переноса с помощью датчика веса. Например, после того как датчики 63c и 67c прибытия обнаруживают, что объект 50 транспортировки находится рядом с нижним по потоку концом третьей секции 23c ускорения или третьей секции 27c замедления, таймер может измерять прошедшее время, после того как объект 50 транспортировки был перемещен ниже по потоку (высокоскоростная секция 25 или расположенная ниже по потоку низкоскоростная секция 29), чтобы быть необнаруживаемым (датчики были выключены), и затем управление восстановлением скорости может начинаться после предварительно определенного времени, после того как датчики были выключены.
[0038] В настоящем варианте осуществления управление на пути 12 транспортировки выполняется посредством единственного контроллера 70. Управление может быть распределено между множеством контроллеров. Например, контроллер может быть предусмотрен для каждой из секций с переменной скоростью с тем, чтобы управлять вращениями мотора в секции с переменной скоростью контроллера и выполнять отдельно управление переносом или управление восстановлением скорости для каждой из секций с переменной скоростью, в то же время связываясь с устройствами, требуемыми для управления, например, датчиком прибытия в исходной позиции ускорения/замедления секции с переменной скоростью или датчиком веса расположенной выше/ниже по потоку секции транспортировки.
В вышеописанном настоящем варианте осуществления, ради упрощения, расположенная выше по потоку низкоскоростная секция 21, высокоскоростная секция 25 и расположенная ниже по потоку низкоскоростная секция 29, которые одного в качестве секций транспортировки с постоянной скоростью, каждая состоит из единственного ленточного транспортера. Секция транспортировки с постоянной скоростью может включать в себя множество транспортеров. Например, высокоскоростная секция 25 может включать в себя несколько транспортеров, размещенных последовательно так, чтобы транспортировать объект транспортировки с постоянной высокой скоростью. В этом случае последовательность транспортеров для транспортировки с постоянной высокой скоростью действует как высокоскоростная секция 25. Кроме того, транспортер для начала замедления, расположенный на самом нижнем по потоку конце, действует в качестве первой секции 27a замедления.
В настоящем варианте осуществления секция транспортировки, включающая в себя ленточный транспортер, может быть заменена другим механизмом транспортировки, таким как роликовый транспортер, пока объект 50 транспортировки может транспортироваться. Альтернативно, надлежащий один из лотков 52 транспортировки различных размеров и подготовленных форм может быть выбран и использован согласно размерам и форме объекта 50 транспортировки. Альтернативно, объект 50 транспортировки может непосредственно транспортироваться посредством транспортеров без использования лотка 52 транспортера. В этом случае, если объект 50 транспортировки имеет небольшой размер, перенос объекта 50 транспортировки между секциями транспортировки определяется раньше, так, чтобы быстро начинать управление восстановлением скорости. Таким образом, если множество объектов 50 транспортировки имеют небольшие размеры, эффективность транспортировки всего аппарата улучшается.
Устройство погружения перемещающего типа
Устройство погружения
Конвейерное устройство с использованием конвейерного подвижного элемента
Бесконтактное питающее оборудование
Устройство для перемещения изделия и кран-штабелер, содержащий указанное устройство
Устройство конвейерной транспортировки типа тележки и способ рулевого управления таким устройством
Пластинчатый конвейер
Транспортный конвейер и транспортное устройство
Поддон для транспортировки багажа
Конвейерное устройство и способ регулировки конвейерного устройства

