Результат интеллектуальной деятельности: ЕСТЕСТВЕННЫЙ СПУСКОВОЙ МЕХАНИЗМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Объектом настоящего изобретения является спусковой (анкерный) механизм часов, содержащий упор между резонатором с одной стороны и двумя анкерными колесными узлами с другой стороны, на каждый из которых воздействует крутящий момент.
Объектом настоящего изобретения является также часовой механизм, содержащий по меньшей мере один такой спусковой механизм.
Объектом настоящего изобретения являются также часы, содержащие по меньшей мере один такой часовой механизм и/или по меньшей мере один такой спусковой механизм.
Настоящее изобретение относится к области часовых механизмов для передачи движения, в частности к области спусковых механизмов.
Уровень техники
Традиционный анкерный спуск швейцарских часов является очень широко распространенным устройством, представляющим собой часть регулирующего элемента механических часов. Данный механизм дает возможность одновременно поддерживать движение резонатора пружинного баланса и синхронизировать вращение механизма передачи с резонатором.
Для выполнения данных функций анкерное колесо взаимодействует с анкерной вилкой с помощью силы механического контакта, и в традиционном анкерном спуске швейцарских часов используется такой механический контакт между анкерным колесом и швейцарским рычагом для выполнения первой функции передачи энергии от анкерного колеса к пружинному балансу, с одной стороны, и выполнения, с другой стороны, второй функции, заключающейся в спуске и запирании анкерного колеса в рывках, таким образом, чтобы он перемещался на один шаг при каждой вибрации баланса.
Механический контакт, необходимый для выполнения указанных первой и второй функций, снижает эффективность, изохронность, запас хода и срок службы часов.
Различные проводившиеся исследования предлагали синхронизировать вращение колеса привода с помощью механического резонатора за счет использования силы бесконтактного взаимодействия, такого как в спусковом механизме системы "Клиффорд". Во всех этих системах используется сила взаимодействия магнитного происхождения, что позволяет передавать энергию от колеса привода к резонатору со скоростью, определяемой собственной частотой резонатора. Однако все они имеют тот же недостаток, заключающийся в невозможности выполнения второй функции, т.е. надежного спуска и запирания анкерного колеса рывками. В частности, вследствие ударного воздействия может произойти десинхронизация колеса и механического резонатора, в результате чего регулирующие функции более не будут обеспечиваться.
В документе US 3518464 (заявитель KAWAKAMI TSUNETA) раскрывается электромагнитный механизм привода колеса резонатором. В данном документе указывается, что использование магнитного приводного механизма и системы спуска оказывает неблагоприятное воздействие на частоту. Данный механизм содержит вибрационную полоску, но не содержит упора, и, разумеется, не имеет мультистабильного опорного элемента. При вращении колеса и в фиксированном положении резонатора сила взаимодействия колеса и резонатора постепенно изменяется от минимального (отрицательного) до максимального (положительного) значения в угловом периоде.
В патенте Германии на полезную модель №1935486U (заявитель JUNGHANS) описывается приводной механизм с электромагнитными фиксаторами. Этот механизм также содержит вибрационную полоску, но не содержит упора, и, разумеется, не содержит мультистабильного опорного элемента. Данный механизм содержит рампы и барьеры, использующие комбинированные и одновременные перемещения колеса и резонатора.
В документе US 3183426А (заявитель HAYDON ARTHUR) описывается полностью магнитный спусковой механизм, содержащий магнитное анкерное колесо, в котором энергия непрерывно и постепенно изменяется от минимума до максимума при поворачивании колеса на ½ периода, а затем снова возвращается к минимальному значению при вращении колеса в последующей ½ периода. Иными словами, действующая на колесо магнитная сила изменяется постепенно от минимального (отрицательного) до максимального (положительного) значения в угловом периоде.
Раскрытие изобретения
Настоящее изобретение предлагает заменить силу механического контакта между палетами и анкерным колесом силой бесконтактного взаимодействия магнитного или электромагнитного характера, с устройством, обеспечивающим надежное и безопасное осуществление второй функции спуска и запирания анкерного колеса рывками.
С этой целью, настоящим изобретением предлагается спусковой механизм для часов, содержащий упор между резонатором с одной стороны и с другой стороны первым анкерным колесным узлом и вторым анкерным колесным узлом, на каждый из которых действует крутящий момент, отличающийся тем, что каждый указанный анкерный колесный узел содержит по меньшей мере одну намагниченную или ферромагнитную или, соответственно, электрически заряжаемую или электростатически проводящую дорожку с периодом прохождения, в течение которого его магнитные или, соответственно, электростатические характеристики повторяются, причем указанный упор содержит по меньшей мере один намагниченный или ферромагнитный, или, соответственно, электрически заряжаемый или электростатически проводящий полюсный башмак, причем указанный полюсный башмак может перемещаться в поперечном направлении относительно направления перемещения по меньшей мере одного элемента поверхности указанной дорожки, и по меньшей мере указанный полюсный башмак или указанная дорожка создают магнитное или электростатическое поле в воздушном зазоре между указанным по меньшей мере одним полюсным башмаком и указанной по меньшей мере одной поверхностью, а также тем, что указанный полюсный башмак встречается с барьером магнитного или электростатического поля на указанной дорожке непосредственно перед каждым поперечным перемещением указанного упора, инициируемым за счет периодического срабатывания указанного резонатора, причем указанный первый анкерный колесный узел, на который действует первый крутящий момент, и указанный второй анкерный колесный узел, на который действует второй крутящий момент, могут поочередно взаимодействовать с указанным упором, а указанный первый анкерный колесный узел и указанный второй анкерный колесный узел вращаются относительно отдельных осей и соединены друг с другом посредством прямой кинематической связи.
Объектом настоящего изобретения является также часовой механизм, содержащий по меньшей мере один такой спусковой механизм.
Объектом настоящего изобретения являются также часы, содержащие по меньшей мере один такой часовой механизм и/или по меньшей мере один такой спусковой механизм.
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения станут более ясными после ознакомления с приведенным ниже его подробным описанием со ссылками на приложенные чертежи.
На фиг. 1 показано схематичное изображение первого варианта реализации спускового механизма согласно настоящему изобретению, содержащего упор в виде анкерной вилки магнитного полюсного башмака на палетном рычаге, взаимодействующего с анкерным колесом, намагничиваемым несколькими дополнительными концентрическими дорожками, каждая из которых содержит несколько намагниченных областей различной интенсивности, которые создают различные отталкивающие силы, действующие на полюсный башмак анкерной вилки, когда последняя находится в непосредственной близости от указанных намагниченных областей, находящихся непосредственно рядом с двумя соседними концентрическими дорожками, также имеющими различные уровни намагниченности. На фиг. 1 показан упрощенный вариант исполнения с двумя дорожками (внутренней и внешней).
На фиг. 2 представлена схема (вид сверху) распределения потенциальной энергии магнитного взаимодействия полюсного башмака анкерной вилки, изображенной на фиг. 1, в зависимости от его положения относительно анкерного колеса, а ступенчатая линия демонстрирует траекторию полюсного башмака анкерной вилки при работе, последовательно проходящего над внутренней и внешней дорожками, показанными на фиг. 1.
На фиг. 3 приведен график для первого варианта реализации, показанного на фиг. 1 и 2, иллюстрирующий изменение потенциальной энергии (по оси ординат) в направлении вдоль намагниченных дорожек в зависимости от центрального угла (по оси абсцисс), для каждой из двух дорожек, показанных на фиг. 1; зависимость для внутренней дорожки показана сплошной линией, для внешней дорожки - пунктирной линией. Этот график демонстрирует накопление потенциальной энергии, полученной от анкерного колеса на участках Р1-Р2 и Р3-Р4, каждый из которых соответствует половине периода, и возврат указанной энергии анкерной вилкой и передачу данной энергии балансу, когда полюсный башмак Р2-Р3 и Р4-Р5 переходит на другую дорожку.
На фиг. 4 представлено схематичное перспективное изображение второго варианта реализации спускового механизма согласно настоящему изобретению, содержащего анкерную вилку с несколькими магнитными башмаками, в данном случае, в виде двух вилочных элементов, каждый из которых имеет два полюсных башмака на каждой стороне плоскости анкерного колеса, причем два вилочных элемента расположены с каждой стороны точки поворота анкерной вилки, аналогично расположению палетных камней обычного швейцарского рычага. На анкерном колесе выполнен ряд рамп, каждая из которых представляет собой последовательность магнитов изменяющейся и увеличивающейся интенсивности; каждая рампа ограничена барьером магнитов, причем данные различные магниты последовательно взаимодействуют с двумя вилочными элементами анкерной вилки.
На фиг. 5 приведено поперечное сечение вилочного элемента анкерной вилки, изображенной на фиг. 4, и показано направление полей различных намагниченных участков анкерной вилки и анкерного колеса.
На фиг. 6 показано поперечное сечение в поперечной плоскости, в которой происходит взаимодействие анкерного колесного узла и упора согласно настоящему изобретению, для различных вариантов расположения магнитов, взаимодействующих с целью концентрации магнитного поля в зоне воздушного зазора.
На фиг. 7-10 показано поперечное сечение по плоскости, проходящей через ось анкерного колесного узла противоположного полюсного башмака упора в положении взаимодействия их соответствующих структур в различных вариантах реализации.
На фиг. 7 изображена расположенная на анкерном колесе намагниченная структура изменяемой толщины или интенсивности, взаимодействующая с магнитным полем, создаваемым магнитным контуром, выполненным заодно с анкерной вилкой; при вышеупомянутом взаимодействии происходит либо отталкивание, либо притяжение.
На фиг. 8 изображена расположенная на дорожке анкерного колеса ферромагнитная структура изменяемой толщины, создающая изменяемый воздушный зазор, взаимодействующий с магнитным полем, создаваемым магнитным контуром, выполненным заодно с анкерной вилкой.
На фиг. 9 изображено анкерное колесо с двумя дисками, выполненными из намагниченной структуры изменяемой толщины или интенсивности, расположенной на двух поверхностях анкерного колеса, взаимодействующих с магнитным полем, создаваемым магнитом, выполненным заодно с анкерной вилкой, окруженной двумя поверхностями; при взаимодействии может происходить отталкивание или притяжение.
На фиг. 10 показана структура, механически аналогичная показанной на фиг. 9, в которой на двух противоположных поверхностях анкерного колеса размещена ферромагнитная структура изменяемой толщины, создающая изменяемый воздушный зазор при взаимодействии с магнитным полем, создаваемым магнитом, выполненным заодно с анкерной вилкой.
На фиг. 11-14 представлено схематичное изображение распределения магнитного поля в поперечной плоскости, проходящей через ось вращения анкерного колеса механизма, изображенного на фиг. 1, на двух дополнительных дорожках (внутренней и внешней), для положений, соответствующих положениям, показанным на фиг. 2 и 3, фиг. 11 (точка Р1 и эквивалентный точке Р5 сдвиг на целый период), фиг. 12 (точка Р2), фиг. 13 (точка Р3), фиг. 14 (точка Р4).
На фиг. 15 представлена блок-схема часов, содержащих часовой механизм, включающий в себя спусковой механизм согласно настоящему изобретению.
На фиг. 16 показан вариант реализации, в котором анкерный колесный узел представляет собой цилиндр, а упор содержит подвижный полюсный башмак, расположенный вблизи образующей цилиндра.
На фиг. 17 изображен еще один вариант реализации изобретения, в котором анкерный колесный узел представляет собой непрерывную дорожку.
На фиг. 18 показано перемещение полюсного башмака, располагающегося рядом с поверхностью дорожки левого анкерного колесного узла.
На фиг. 19 продемонстрирована периодичность перемещения полюсного башмака вдоль дорожки, содержащей две параллельные дополнительные дорожки.
На фиг. 20-25 показаны профили рампы или барьера, и энергия, передаваемая для каждого из этих профилей.
На фиг. 26 частично показан вариант реализации изобретения, аналогичный варианту, представленному на фиг. 4, но содержащий два концентрических ряда магнитов увеличивающейся интенсивности намагничивания, на внутренней дорожке, поляризованной вверх, и на внешней дорожке поляризованной вниз.
На фиг. 27 схематично изображена ориентация силовых линий магнитного поля в поперечном сечении, соответствующем варианту реализации, показанному на фиг. 26.
На фиг. 28 показано распределение потенциала для того же самого примера, с центром дорожки, показанной пунктиром, и отходом, показанным сплошной линией.
На фиг. 28А показано изменение по периоду прохождения уровня энергии (верхний график) и тормозного момента (нижний график); верхний и нижний графики выровнены друг с другом по оси абсцисс.
На фиг. 29-34 показана конструкция спускового механизма согласно настоящему изобретению.
На фиг. 29, 30 представлены схематичные перспективные изображения данного спускового механизма, содержащего резонатор, образованный узлом обычного пружинного баланса, который взаимодействует с радиальным упором, взаимодействующим попеременно с первым или вторым из двух анкерных колесных узлов, соединенных зубчатой передачей, и включающим в себя множество магнитных путей, образующих рампы и барьеры для взаимодействия с полюсным башмаком упора; на фиг. 30 устройство изображено без зубчатых колес, соединяющих данные анкерные колесные узлы.
На фиг. 31-34 показана кинематическая схема (вид в плане), иллюстрирующая переменное взаимодействие упора с обоими указанными анкерными колесами.
Осуществление изобретения
Настоящее изобретение предлагает заменить обычную силу механического контакта упора с анкерным колесом бесконтактной силой магнитного или электростатического взаимодействия.
Объектом изобретения является спусковой механизм 10 часов, содержащий упор 30 между резонатором 20 и анкерным колесным узлом 40.
Согласно настоящему изобретению, этот анкерный колесный узел 40 содержит по меньшей мере одну намагниченную или ферромагнитную или, соответственно, электрически заряженную или электростатическую электропроводную дорожку 50, с периодом прохождения PD, в течение которого магнитные или, соответственно, электростатические характеристики повторяются.
Данное изобретение иллюстрируется на примере предпочтительного варианта реализации с поворачиванием на величину углового перемещения и периодом углового перемещения PD.
Геометрические и физические характеристики дорожки 50 в течение периода прохождения PD, в частности, ее состав (материалы), профиль, возможное покрытие, а также возможное намагничивание или электрическая зарядка, остаются неизменными.
Данный упор 30 содержит по меньшей мере один намагниченный или ферромагнитный, или, соответственно, электрически заряжаемый или электростатически проводящий полюсный башмак 3.
Полюсный башмак 3 может перемещаться в поперечном направлении DT относительно направления перемещения DD по меньшей мере одного компонента поверхности 4 дорожки 50. При таком перемещении в поперечном направлении полюсный башмак не покидает полностью пределы соответствующей дорожки; разумеется, конструкция зависит от варианта реализации, и в некоторых из них полюсный башмак покидает дорожку во время части своего перемещения.
По меньшей мере полюсный башмак 3 или дорожка 50 создают магнитное или электростатическое поле в воздушном зазоре 5 между указанным по меньшей мере одним полюсным башмаком 3 и указанной по меньшей мере одной поверхностью 4.
Полюсный башмак 3 встречается с барьером 46 магнитного или электростатического поля на дорожке 50 непосредственно перед каждым поперечным перемещением упора 30; данное поперечное перемещение обеспечивается периодическим срабатыванием резонатора 20.
Упор 30 является мультистабильным, т.е. может находиться по меньшей мере в двух устойчивых положениях.
Предпочтительно магнитное или электростатическое поле, создаваемое этим по меньшей мере одним полюсным башмаком 3 или дорожкой 50 в воздушном зазоре 5 между по меньшей мере одним полюсным башмаком 3 и данной по меньшей мере одной поверхностью 4, создает крутящий момент или силу, воздействующую по меньшей мере на один полюсный башмак 3 и по меньшей мере на одну поверхность 4. Данный крутящий момент или сила представляют собой периодические тормозной момент или силу, соответствующую периоду углового перемещения PD, которые начинаются с нулевого значения крутящего момента или силы; первый полупериорд содержит потенциальную рампу, где крутящий момент или сила являются практически постоянными и приблизительно равны первому значению V1; вторая половина периода содержит потенциальный барьер, в котором указанный тормозной момент или пара сил возрастают и достигают максимального второго значения V2, которое по меньшей мере в три раза больше первого значения V1 и одного знака с первым значением V1, как показано на фиг. 28А.
В частности, на каждой дорожке 50 перед каждым барьером 46 установлена рампа 45, взаимодействующая по нарастающей с полюсным башмаком 3 с помощью магнитного или, соответственно, электростатического поля, интенсивность которого изменяется таким образом, чтобы создать увеличивающуюся потенциальную энергию; эта рампа 45 берет энергию от анкерного колесного узла 40, и каждый потенциальный барьер является более крутым, чем каждая потенциальная рампа.
Более конкретно, в анкерном колесном узле 40 между двумя соседними рампами 45 одной и той же дорожки 50 или между двумя соседними дорожками 50 в направлении перемещения DD имеется потенциальный барьер магнитного или, соответственно, электростатического поля, служащий для инициирования паузы в работе анкерного колесного узла 40 перед отклонением упора 30 в результате периодического воздействия осциллятора 2.
В частности, как показано на фиг. 28А, крутящий момент или сила являются периодически действующими крутящим моментом или силой, изменяющимися в зависимости от периода углового перемещения PD. Далее, начиная с нулевого крутящего момента или силы в начале периода PD, интенсивность крутящего момента или силы является положительной, и их величина возрастает на протяжении первого угла Т1 до тех пор, пока не достигнет горизонтального участка с практически постоянным значением V1 при втором угле Т2; сочетание первого угла Т1 и второго угла Т2 образует потенциальную рампу, до тех пор, пока не будет достигнуто пороговое значение S, после чего интенсивность возрастает до второго максимального значения V2, более высокого, чем первое значение V1, на протяжении третьего угла Т3. В момент окончания третьего угла Т3 имеет место пик МС (максимальный уровень крутящего момента или силы) со вторым значением V2, после чего интенсивность крутящего момента или силы падает на протяжении четвертого угла Т4, достигая нулевого значения, которое соответствует максимальному уровню энергии ME. Сочетание третьего угла Т3 и четвертого угла Т4 образует потенциальный барьер, при котором крутящий момент или сила являются положительными. За этой точкой на протяжении пятого угла Т5 крутящий момент или сила продолжают уменьшаться до минимальной отрицательной интенсивности в нижней точке mc, а затем на протяжении шестого угла Т6 снова возрастают до положительной величины и начала следующего периода, где TD=T1+T2+T3+T4+T5+T6, причем Т1+Т2≥TD/2.
Более конкретно, барьер 46 образует разрывный порог за счет резкого увеличения или снижения крутящего момента или силы в момент перемещения, соответствующий третьему углу Т3, причем данный третий угол Т3 меньше 1/3 второго угла Т2.
В частности, второе максимальное значение V2 более чем в шесть раз больше первого значения V1.
Предпочтительно механизм 10 содержит также механическое останавливающее средство, служащее для предотвращения перехода упора 30 на отрицательный крутящий момент на протяжении пятого угла Т5 или шестого угла Т6 во втором полупериоде.
В конкретном варианте реализации изобретения данный спусковой механизм 10 аккумулирует энергию, получаемую от анкерного колесного узла 40 на протяжении каждой половины периода PD, сохраняет часть ее в виде потенциальной энергии и периодически возвращает на резонатор 20. В качестве аналогии, такое аккумулирование энергии эквивалентно постепенному подзаводу пружины механизма. Данное возвращение энергии имеет место между этими полупериодами, во время поперечного перемещения упора 30 за счет периодического срабатывания резонатора 20. Затем полюсный башмак 3 переходит от первой половины поперечного перемещения PDC относительно анкерного колесного узла 40 ко второй половине поперечного перемещения DDC относительно анкерного колесного узла 40, или наоборот. Полюсный башмак 3 встречается с барьером 46 магнитного или электростатического поля на дорожке 50 непосредственно перед каждым поперечным перемещением упора 30, обеспечиваемым периодическим срабатыванием резонатора 20 посредством качания и перехода от одной половины поперечного перемещения к другой.
В конкретном варианте реализации магнитное или электростатическое поле, создаваемое полюсным башмаком 3 и/или дорожкой 50, имеет более высокую интенсивность на первой половине перемещения PDC, чем на второй половине перемещения DDC, на первой половине указанного периода прохождения PD, и более высокую интенсивность на второй половине перемещения DDC, чем на первой половине перемещения PDC, на второй половине периода прохождения PD.
Более конкретно, резонатор 20 содержит по меньшей мере один периодически перемещающийся осциллятор 2. Анкерный колесный узел 40 приводится в действие за счет источника энергии типа пружинного барабана или аналогичного элемента. Упор 30 обеспечивает, во-первых, выполнение первой функции, заключающейся в передаче энергии от анкерного колесного узла 40 на резонатор 20, и, во-вторых, выполнение второй функции, заключающейся в освобождении и запирании рывками анкерного колеса 40 для смещения его на один шаг при перемещении упора 30 за счет срабатывания резонатора 20 при каждом колебании осциллятора 2. Эта по меньшей мере одна дорожка 50 перемещается по траектории движения TD.
Предпочтительно каждый полюсный башмак 3 перемещается в поперечном направлении DT относительно дорожки 50 на первой половине перемещения PDD и на второй половине перемещения DDC с обеих сторон от фиксированного среднего положения РМ, по поперечной траектории ТТ, предпочтительно, практически перпендикулярной траектории движения TD дорожки 50.
Между полюсным башмаком 3 и поверхностью 4 дорожки имеется воздушный зазор 5, который дорожка 50 и/или полюсный башмак 3 создают с помощью магнитного или электростатического поля и который позволяет создавать систему магнитных или электростатических сил, воздействующих на упор 30 и анкерный колесный узел 40, вместо сил механического контакта, используемых в известном уровне техники.
Спусковой механизм 10 согласно настоящему изобретению аккумулирует потенциальную энергию, получаемую от источника энергии через анкерный колесный узел 40 на каждой первой или второй половине периода прохождения PD. Полюсный башмак 3 встречается с барьером 46 магнитного или электростатического поля на участке дорожки 50, в сторону которого он перемещается, непосредственно перед поперечным перемещением упора 30, обеспечиваемым периодическим срабатыванием резонатора 20. Именно в этот момент спусковой механизм 10 возвращает соответствующую энергию на осциллятор 2 при поперечном перемещении упора 30, периодически инициируемом резонатором 20 между первой и второй половинами периода прохождения PD. Во время этого поперечного перемещения полюсный башмак 3 переходит от первой половины перемещения PDC ко второй половине перемещения DDC, или наоборот.
Анкерный колесный узел 40 может быть выполнен по-разному: в стандартной форме, в виде анкерного колеса 400, как показано на фиг. 1, 4 и 29, в виде двойного колеса, как показано на фиг. 9 и 10, в виде цилиндра, как показано на фиг. 16, в виде непрерывной дорожки, как показано на фиг. 17, а также в какой-либо другой форме. В настоящем описании рассматривается общий случай колесного узла (не обязательно поворачивающегося) и производителю предоставляется самому решать, каким образом следует использовать его в конкретном варианте, в частности, в случае одинарного или составного колеса.
Предпочтительно характеристики магнитного или электростатического поля изменяются при переходе от первой половины перемещения PDC ко второй половине перемещения DDC, со сдвигом по фазе, равным полупериоду перемещения PD между дорожкой 50 и полюсным башмаком 3. Однако данное устройство также может работать с различными интенсивностями поля, учитывая в то же самое время различные скорости распределения поля между различными участками. Такой случай может иметь место, например, в варианте реализации, показанном на фиг. 1, при котором угловые участки, ограниченные различными радиусами, не обязательно будут иметь в точности одинаковые характеристики.
Здесь под поперечным направлением DT подразумевается направление, по существу параллельное поперечной траектории перемещения ТТ полюсного башмака 3, или направленное по касательной к данному направлению в среднем положении РМ, как показано на фиг. 18.
В данном случае осевым направлением DA считается направление, перпендикулярное как поперечному направлению DT, по существу параллельному поперечной траектории ТТ полюсного башмака, так и направлению перемещения DF дорожки 50, направленному по касательной к траектории движения TD в среднем положении РМ.
Под плоскостью РР дорожки понимается плоскость, образуемая средним положением РМ, поперечным направлением DT и направлением перемещения DF.
Предпочтительно, по меньшей мере один из двух противоположных компонентов (термин "противоположные" здесь означает, что данные два компонента расположены напротив друг друга, но отсутствуют какие-либо силы отталкивания, взаимное столкновение или какое-либо иное взаимодействие), сформированных полюсным башмаком 3 и дорожкой 50 с поверхностью 4, обращенной в сторону полюсного башмака, по меньшей мере в части своего относительного перемещения в воздушном зазоре 5, содержит активное магнитное или, соответственно, электростатическое средство, служащее для создания такого магнитного или, соответственно, электростатического поля.
Термин "активное" в настоящем описании означает, что данное средство создает поле, а термин "пассивное" означает, что средство подвергается воздействию данного поля. Термин "активное" не означает, что через данный компонент проходит электрический ток.
В конкретном варианте реализации составляющая данного поля в осевом направлении DA больше составляющей в плоскости РР дорожки, на их поверхности сопряжения в воздушном зазоре 5 между полюсным башмаком 3 и противоположной поверхностью 4.
В конкретном варианте реализации направление этого магнитного или электростатического поля по существу параллельно осевому направлению DA анкерного колесного узла 40. Выражение "по существу параллельно" относится к полю, составляющая которого в осевом направлении DA по меньшей мере в четыре раза больше составляющей в плоскости PP.
Таким образом, другой противоположный компонент в воздушном зазоре 5 содержит либо пассивное магнитное, либо, соответственно, электростатическое средство для взаимодействия с созданным полем, или также активное магнитное или, соответственно, электростатическое средство для создания магнитного или, соответственно, электростатического поля в воздушном зазоре 5, причем указанное поле может способствовать или противодействовать полю, создаваемому первым компонентом, таким образом, чтобы генерировать отталкивающее или, наоборот, притягивающее усилие в воздушном зазоре 5.
В конкретном варианте реализации изобретения, показанном на фиг. 1, и во втором варианте реализации, представленном на фиг. 4, упор 30 установлен между резонатором 20, содержащим пружинный баланс 2 с осью А вращения, и по меньшей мере одним анкерным колесом 400, вращающимся относительно оси D вращения (которая совместно с осью А вращения пружинного баланса определяет начальное угловое направление DREF). Данный упор 30 обеспечивает осуществление второй функции, заключающейся в освобождении и запирании анкерного колесного узла 40 рывками для смещения его на один шаг при каждом колебании пружинного баланса 2.
Полюсный башмак 3 по меньшей мере в части своего движения в поперечном направлении перемещается по меньшей мере над одним элементом поверхности 4 анкерного колесного узла 40. В представленном на фиг. 1 первом варианте реализации полюсный башмак всегда находится над поверхностью 4, в то время как во втором варианте, показанном на фиг. 4, упор 30 содержит два полюсных башмака 3А, 3В, каждый из которых находится над поверхностью 4 в течение одного полупериода и удален от поверхности 4 в течение другого полупериода, находясь в положении, в котором какое бы то ни было магнитное или электростатическое взаимодействие между ними является пренебрежимо малым.
В одном из возможных вариантов реализации каждый из двух противоположных компонентов с обеих сторон воздушного зазора 5 между полюсным башмаком 3 и поверхностью 4 дорожки 50, обращенной в сторону полюсного башмака, по меньшей мере в части своего относительного перемещения содержит активное магнитное или, соответственно, электростатическое средство, служащее для создания магнитного или, соответственно, электростатического поля в направлении, по существу параллельном осевому направлению DA на поверхности сопряжения в воздушном зазоре 5.
В предпочтительном варианте исполнения полюсный башмак 3 и/или дорожка 50 с опорной поверхностью 4, обращенной в сторону полюсного башмака в воздушном зазоре 5, содержит магнитное или, соответственно, электростатическое средство, служащее для создания в воздушном зазоре 5 по меньшей мере в одной поперечной плоскости, определяемой средним положением РМ полюсного башмака 3, поперечным направлением DT и осевым направлением DA, и в поперечном диапазоне относительного перемещения, в указанном поперечном направлении полюсного башмака 3 и поверхности 4, магнитного или, соответственно, электростатического поля переменной и ненулевой интенсивности, интенсивность которого соответствует как поперечному положению полюсного башмака 3 в поперечном направлении DT, так и периодичности по времени.
В конкретном варианте реализации изобретения каждый такой полюсный башмак 3 и каждая такая дорожка 50 с поверхностью 4, обращенной к полюсному башмаку, содержит такое магнитное или, соответственно, электростатическое средство, которое способно создавать магнитное или, соответственно, электростатическое поле между по меньшей мере одним таким полюсным башмаком 3 и по меньшей мере одной поверхностью 4, по меньшей мере в указанной поперечной плоскости РТ. Данное магнитное или, соответственно, электростатическое поле, создаваемое этими противоположными компонентами, является полем изменяемой и ненулевой интенсивности, зависящей как от радиального положения полюсного башмака 3 в поперечном направлении DT, так и от периодичности по времени.
Разумеется, должны быть обеспечены условия для создания силы магнитного или электростатического происхождения между упором 30 и анкерным колесным узлом 40 для обеспечения привода или, наоборот, торможения между этими двумя компонентами без какого-либо механического контакта между ними.
Условия создания магнитного или электростатического поля одним из этих компонентов и принятия данного поля противоположным компонентом, который также способен создавать магнитное или электростатическое поле, дают возможность осуществления операций различных типов за счет взаимного притяжения или отталкивания данных противоположных компонентов. В частности, многоуровневые архитектуры позволяют уравновешивать крутящие моменты и силы в направлении качания анкерного колесного узла 40 (в частности, в направлении оси вращения, если узел 40 совершает вращательное движение относительно единой оси), и сохранять неизменное относительное положение упора 30 и анкерного колесного узла 40 в осевом направлении DA, как будет показано ниже.
В конкретном варианте реализации изобретения составляющая магнитного или, соответственно, электростатического поля в направлении DA, не меняет своего направления во всем диапазоне относительного перемещения полюсного башмака 3 и противоположной поверхности 4.
Возможны различные конфигурации, в зависимости от природы поля, а также от того, выполняют упор 30 и/или анкерный колесный узел 40 активную или пассивную функцию в создании магнитного или электростатического поля по меньшей мере в одном воздушном зазоре между упором и анкерным колесным узлом 40. В действительности, может быть несколько воздушных зазоров 5 между различными полюсными башмаками 3 упора 30 и различными дорожками анкерного колесного узла 40. Различные неограничивающие предпочтительные варианты реализации описаны ниже.
Так, в одном из возможных вариантов каждый полюсный башмак на упоре 30 представляет собой постоянный или, соответственно, электрически заряжаемый магнит, который создает постоянное магнитное или, соответственно, электростатическое поле, а каждая поверхность 4, взаимодействующая с каждым полюсным башмаком 3, образует с соответствующим полюсным башмаком 3 воздушный зазор 5, в котором образуется магнитное или, соответственно, электростатическое поле, изменяющееся в зависимости от продвижения анкерного колесного узла 40 по своей траектории, а также от положения в поперечном направлении соответствующего полюсного башмака 3 относительно анкерного колесного узла 40, и связано с угловым перемещением упора 30, если он поворачивается, как в случае с анкерной вилкой, или с его перемещением в поперечном направлении, если он приводится каким-либо иным способом резонатором 20.
В еще одном из возможных вариантов каждый полюсный башмак на упоре 30 выполнен из постоянно-ферромагнитного или, соответственно, электростатически проводящего материала, а каждая поверхность 4, взаимодействующая с каждым полюсным башмаком 3, образует с соответствующим полюсным башмаком 3 воздушный зазор 5, в котором образуется магнитное или, соответственно, электростатическое поле, изменяющееся в зависимости от продвижения анкерного колесного узла 40 по своей траектории, а также от положения в поперечном направлении соответствующего полюсного башмака 3 относительно анкерного колесного узла 40, и связано с угловым перемещением упора 30, если он поворачивается, как в случае с анкерной вилкой, или с его перемещением в поперечном направлении, если он приводится каким-либо иным способом резонатором 20.
В еще одном возможном варианте каждая дорожка 50 с противоположной поверхностью 4 представляет собой постоянный или, соответственно, электрически заряжаемый однородный магнит, и создает постоянное магнитное или, соответственно, электростатическое поле на своей поверхности, обращенной к соответствующему полюсному башмаку 3, и содержит область разгрузки, предусмотренную для изменения высоты в воздушном зазоре 5, которая изменяется в зависимости от продвижения анкерного колесного узла 40 по своей траектории, а также от углового положения соответствующего полюсного башмака 3 относительно анкерного колесного узла 40.
В еще одном возможном варианте каждая дорожка 50 с такой поверхностью 4 выполнена из постоянно-ферромагнитного или, соответственно, электростатически проводящего материала и содержит профиль, служащий для изменения высоты воздушного зазора 5, которая изменяется в зависимости от продвижения анкерного колесного узла 40 по своей траектории, а также от положения в поперечном направлении соответствующего полюсного башмака 3 относительно анкерного колесного узла 40.
В еще одном возможном варианте каждая дорожка 50 с такой поверхностью 4 постоянно намагничивается или, соответственно, электрически заряжается периодически в зависимости от местного положения на дорожке, и создает постоянное магнитное или, соответственно, электростатическое поле, которое изменяется в зависимости от продвижения анкерного колесного узла 40 по своей траектории, а также от положения в поперечном направлении соответствующего полюсного башмака 3 относительно анкерного колесного узла 40, поверхность которого обращена к вышеуказанному полюсному башмаку 3.
В еще одном возможном варианте реализации каждая дорожка 50 с такой поверхностью 4 является постоянно-ферромагнитной или, соответственно, электростатически проводящей переменным образом в зависимости от местного положения на дорожке, таким образом, чтобы изменялась магнитна или, соответственно, электростатическая сила, действующая между упором 3 и анкерным колесным узлом 40 в результате их перемещения относительно друг друга; указанная сила изменяется в зависимости от продвижения анкерного колесного узла 40 по своей траектории, а также от положения в поперечном направлении полюсного башмака 3 относительно анкерного колесного узла 40, поверхность которого обращена к указанному полюсному башмаку 3.
В еще одном возможном варианте реализации каждый полюсный башмак 3 перемещается между двумя поверхностями 4 анкерного колесного узла 40, и магнитное или, соответственно, электростатическое поле воздействует на каждую сторону полюсного башмака 3 в осевом направлении DA, симметрично на каждую сторону полюсного башмака 3, создавая одинаковые по величине и противоположные по направлению крутящие моменту или силы, воздействующие на полюсный башмак 3 в осевом направлении DA. За счет этого обеспечиваются равновесие в осевом направлении и минимальный крутящий момент или сила, воздействующие на любые шарниры, уменьшая, таким образом, потери на трение.
В еще одном возможном варианте реализации каждая поверхность 4 анкерного колесного узла 40 перемещается между двумя поверхностями 31, 32 каждого полюсного башмака 3, и магнитное или, соответственно, электростатическое поле воздействует на каждую сторону поверхности 4 в осевом направлении DA, симметрично на обе стороны поверхности 4, создавая равные по величине и противоположные по направлению крутящие моменты или силы, действующие на поверхность 4 дорожки 50 в осевом направлении DA.
В еще одном возможном варианте реализации дорожка 50 анкерного колесного узла 40 на одной из своих боковых поверхностей 41, 42 содержит несколько дополнительных дорожек 43, расположенных рядом друг с другом.
В конкретном варианте исполнения, где анкерный колесный узел 40 содержит анкерное колесо 400, данные дорожки выполнены концентрическими относительно оси вращения D анкерного колеса 400, как показано на фиг. 1 и 2, на которых изображены две такие дополнительные дорожки, внутренняя 43INT и внешняя 43ЕХТ, и каждая дополнительная дорожка 43 содержит угловой ряд первичных элементарных участков 44, каждый из которых имеет магнитные или, соответственно, электростатические характеристики, отличающиеся от характеристик расположенного рядом первичного участка 44 дополнительной дорожки 43, на которой он находится, а также отличающиеся от характеристик любого другого расположенного рядом первичного участка 44, находящегося на другой дополнительной дорожке 43, расположенной рядом с вышеупомянутой первой дополнительной дорожкой.
В других возможных вариантах реализации, в которых дорожка 50 имеет форму, отличающуюся от диска, как, например, в вариантах, показанных на фиг. 16 и 17, дополнительные дорожки 43 не являются концентрическими, но расположены рядом друг с другом и практически параллельны друг другу. Однако различие по магнитным или, соответственно, электростатическим характеристикам двух расположенных рядом друг с другом первичных участков 44 остается аналогичным образом. На фиг. 18 и 19 показано перемещение полюсного башмака 3 в варианте реализации, содержащем две рядом расположенные и параллельные дополнительные дорожки 43А и 43В, сдвинутые на ½ периода относительно друг друга.
Более конкретно, данная последовательность первичных участков 44 на каждой дополнительной дорожке 43 является периодической в соответствии с шагом Т, который является угловым или линейным, в зависимости от конкретного случая, формируя целое количество оборотов анкерного колесного узла 40. Данный шаг Т соответствует периоду прохождения PD дорожки 50.
В предпочтительном варианте исполнения каждая дополнительная дорожка 43 на каждом шаге Т содержит рампу 45, включающую в себя последовательность, в частности, монотонную последовательность первичных участков 44, взаимодействующих по нарастающей с полюсным башмаком 3 с помощью магнитного или, соответственно, электростатического поля, интенсивность которого изменяется таким образом, чтобы создавать увеличивающуюся потенциальную энергию при переходе от участка минимального взаимодействия 4MIN к участку максимального взаимодействия 4МАХ, причем рампа 45 забирает энергию от анкерного колесного узла 40.
В частности, согласно настоящему изобретению, между двумя рампами 45, последовательно расположенными в одном и том же направлении, анкерный колесный узел 40 содержит барьер магнитного или, соответственно, электростатического поля 46 для инициирования паузы в движении анкерного колесного узла 40 перед отклонением упора 30 за счет срабатывания резонатора 20, в частности, пружинного баланса 2.
Предпочтительно каждый такой потенциальный барьер 46 по напряженности поля должен быть более крутым, чем каждая такая рампа 45.
Так формируются энергетические барьеры; в рассмотренных вариантах реализации данные барьеры формируются с помощью полевых барьеров. Рассмотренные варианты, таким образом, включают в себя рампы магнитного или, соответственно, электростатического поля и полевые барьеры.
Более конкретно, анкерный колесный узел 40 останавливается в положении, при котором напряженность поля равна вращающему крутящему моменту.
Данный останов происходит не мгновенно, присутствует явление отдачи, которое демпфируется либо естественным трением, в частности, трением в шарнире или в механизме, либо специально создаваемым для этого трением вязкой природы, таким как трение, создаваемое вихревыми токами (например, на медной или аналогичной поверхности, прикрепленной к анкерному колесному узлу 40), а также трением за счет аэродинамических или иных сил, или даже за счет сухого трения, такого как трения в пружинной собачке и т.д. Как правило, движение анкерного колесного узла 40 ограничивается расположенным перед ним механизмом с постоянным крутящим моментом или постоянной силой, обычно, с помощью пружинного барабана. Таким образом, анкерный колесный узел 40 совершает колебательные движения до момента остановки в положении перед отклонением полюсного башмака 3 в поперечном направлении, и необходимы потери для остановки колебания в пределах кинетически совместимого временного интервала.
Переход между рампой и барьером может быть создан и отрегулирован таким образом, чтобы энергия, передаваемая на резонатор, зависела от величины вращающего крутящего момента.
Несмотря на то, что настоящее изобретение может работать, используя рампу с непрерывным градиентом, более выгодно использовать рампу 45 с определенным градиентом и барьер 46 с другим градиентом; при этом форма области перехода от рампы 45 к барьеру 46 оказывает значительное влияние на работу системы.
Разумеется, согласно настоящему изобретению, система аккумулирует энергию при подъеме по рампе и возвращает энергию на резонатор при поперечном перемещении полюсного башмака. Точка останова определяет количество возвращаемой таким образом энергии, что зависит от формы области перехода между рампой и барьером.
На фиг. 20, 22 и 24 приведены неограничивающие примеры профилей рампы и барьера; по оси абсцисс отложено перемещение (в данном случае, угол поворота θ), а по оси ординат - энергия Ui (мДж). На фиг. 21, 23 и 25 показана передаваемая энергия для каждого профиля рампы и барьера; по оси абсцисс также отложено перемещение (угол поворота θ), а по оси ординат - крутящий момент СМ (мН*м).
На фиг. 20 и 21 показан мягкий переход с радиусом между рампой и барьером, точка останова системы зависит от прилагаемого крутящего момента, и количество энергии, передаваемой на резонатор, также зависит от прилагаемого крутящего момента.
На фиг. 22 и 23 показан переход с прерыванием градиента между рампой и барьером; при этом точка останова системы не зависит от прилагаемого крутящего момента, а количество энергии, передаваемой на резонатор, является постоянным.
На фиг. 24 и 25 показан переход экспоненциальной формы между рампой и барьером, выбранный таким образом, чтобы количество передаваемой на резонатор энергии было приблизительно пропорционально прилагаемому крутящему моменту, в частности, в конкретном варианте реализации, практически было равно вращающему крутящему моменту. Данный вариант является предпочтительным, поскольку он наиболее близок к традиционному анкерному спуску швейцарских часов, и, следовательно, позволяет использовать настоящее изобретение в существующих часовых механизмах с минимальной модификацией.
В предпочтительном варианте реализации настоящего изобретения анкерный колесный узел 40 включает в себя, как и ранее, в конце каждой такой рампы 45 и непосредственно перед каждым барьером 46, изменение в поперечном направлении распределения магнитного или электростатического поля при намагничивании поверхности 4, или, соответственно, электрическую зарядку или изменение профиля, если поверхность 4 является ферромагнитной или, соответственно, электростатически проводящей, что вызывает оттягивание полюсного башмака 3.
Предпочтительно анкерный колесный узел 40 после каждого такого потенциального барьера 46 магнитного или электростатического поля содержит механический амортизирующий упор.
В качестве варианта, когда анкерный колесный узел 40 содержит несколько дополнительных дорожек 43, по меньшей мере две такие расположенные рядом друг с другом дополнительные дорожки 43 содержат чередующиеся области минимального взаимодействия 4MIN и области максимального взаимодействия 4МАХ с угловым сдвигом по фазе, равным полупериоду шага Т.
В одном из вариантов реализации изобретения упор 30 содержит несколько таких полюсных башмаков 3, одновременно взаимодействующих с отдельными дополнительными дорожками 43, как показано, в частности, для второго варианта реализации на фиг. 4, в котором каждый из отдельных полюсных башмаков 3А и 3В, содержит два магнита 31 и 32, расположенных с обеих сторон от анкерного колеса 400.
Следует отметить, что в конкретном варианте реализации (не показан) упор 30 может содержать гребенку, проходящую параллельно поверхности 4 анкерного колесного узла 40 и содержащую полюсные башмаки 3, расположенные рядом друг с другом.
В одном из возможных вариантов реализации упор 30 поворачивается относительно реальной или виртуальной оси 35 вращения и содержит один полюсный башмак 3, взаимодействующий с первичными участками 44, расположенными на поверхности 4 в разных зонах анкерного колесного узла 40 (или, соответственно, на разных диаметрах анкерного колеса 400), с которыми полюсный башмак 3 взаимодействует попеременно при перемещении (или, соответственно, вращении) анкерного колесного узла 40. Данные первичные участки 44 расположены попеременно на ободке (или, соответственно, на периферии) анкерного колесного узла 40 и служат для ограничения поперечного перемещения полюсного башмака 3 относительно анкерного колесного узла 40 при поиске положения равновесия полюсного башмака 3.
В еще одном варианте реализации изобретения упор 30 поворачивается относительно реальной или виртуальной оси вращения 35 и содержит несколько полюсных башмаков 3, каждый из которых взаимодействует с первичными участками 44 на поверхности 4, расположенными по меньшей мере в одной зоне (соответственно, на одном диаметре) анкерного колесного узла 40, с которой каждый такой полюсный башмак 3 попеременно взаимодействует при перемещении (или, соответственно, вращении) анкерного колесного узла 40. Данные первичные участки 44 расположены попеременно на ободке или на периферии анкерного колесного узла 40 и служат для ограничения поперечного перемещения полюсного башмака 3 относительно анкерного колесного узла 40 при поиске положения равновесия полюсного башмака 3.
В конкретном варианте реализации изобретения в каждый момент времени по меньшей мере один полюсный башмак 3 упора 30 взаимодействует по меньшей мере с одной поверхностью 4 анкерного колесного узла 40.
В конкретном варианте реализации изобретения упор 30 взаимодействует с обеих сторон с первым и вторым анкерными колесными узлами.
В конкретном варианте реализации изобретения данные первый и второй анкерные колесные узлы вращаются совместно.
В конкретном варианте реализации изобретения данные первый и второй анкерные колесные узлы вращаются независимо друг от друга.
В конкретном варианте реализации изобретения данные первый и второй анкерные колесные узлы являются соосными.
В конкретном варианте реализации изобретения упор 30 взаимодействует с двух сторон с первым анкерным колесом 401 и вторым анкерным колесом 402, каждое из которых образует анкерный колесный узел 40.
В конкретном варианте реализации изобретения данные первое анкерное колесо 401 и второе анкерное колесо 402 вращаются совместно.
В конкретном варианте реализации изобретения данные первое и второе анкерные колеса 401 и 402 вращаются независимо друг от друга.
В конкретном варианте реализации изобретения данные первое анкерное колесо 401 и второе анкерное колесо 402 являются соосными.
В варианте реализации, представленном на фиг. 16, анкерный колесный узел 40 содержит по меньшей мере одну цилиндрическую поверхность 4, ось вращения D которой параллельна поперечному направлению DT и на которой расположены магнитная или, соответственно, электростатическая дорожка, а по меньшей мере один полюсный башмак 3 упора 30 перемещается в направлении, параллельном оси вращения D.
На фиг. 17 показан обобщенный вариант конструкции, в которой анкерный колесный узел 40 является механизмом, расположенным в направлении D, и представляет собой бесконечную ленту, перемещающуюся на двух валиках, оси которых параллельны поперечному направлению Т, и на указанной дорожке расположена по меньшей мере одна поверхность 4.
Разумеется, возможны и другие конфигурации для обеспечения пространственной периодичности поверхностей 4 на дорожке или дорожках 50, например, на цепи, кольце, спирали или на других типах поверхностей.
Согласно настоящему изобретению, в качестве неограничивающего примера может быть рассмотрен вариант, в котором поверхность 4 может содержать намагниченный или, соответственно, электрически заряжаемый слой переменной толщины, или намагниченный слой постоянной толщины, но переменной намагниченности, или, соответственно, электрически заряжаемый слой постоянной толщины, но с переменным электрическим зарядом, или микромагнетики с изменяемой поверхностной плотностью, или, соответственно, электреты с изменяемой поверхностной плотностью, или ферромагнитный слой переменной толщины, или, соответственно, электростатически проводящий слой переменной толщины, или ферромагнитный слой переменной формы, или, соответственно, электростатически проводящий слой переменной формы, или ферромагнитный слой с переменной поверхностью отверстия, или, соответственно, электростатически проводящий слой переменной плотности поверхности отверстия.
В конкретном варианте реализации изобретения упор 30 выполнен в форме анкерной вилки.
Объектом настоящего изобретения является также часовой механизм 100 содержащий по меньшей мере один спусковой механизм 10 указанного типа.
Объектом настоящего изобретения являются также часы 200, в частности часы, содержащие по меньшей мере один такой часовой механизм 100 и/или по меньшей мере один такой спусковой механизм 10.
Настоящее изобретение может быть использовано в различных часах, в частности в наручных часах. Настоящее изобретение может оказаться полезным для настольных, настенных часов, часов с гирями, и аналогичных типов часов. Производящий глубокое впечатление, инновационный характер работы механизма согласно настоящему изобретению обеспечивает дополнительное преимущество в демонстрации механизма, и является привлекательным для потребителей или наблюдателей.
На чертежах представлен конкретный неограничивающий вариант реализации, в котором упор 30 выполнен в виде анкерной вилки, и демонстрирует, каким образом настоящее изобретение дает возможность заменить силу обыкновенного механического контакта анкерной вилки с анкерным колесом бесконтактной силой магнитного или электростатического взаимодействия.
Предлагаются два неограничивающих варианта реализации: первый вариант - с одним полюсным башмаком, и второй вариант - с несколькими полюсными башмаками.
Первый вариант реализации показан (только в магнитной версии) на фиг. 1-3.
На фиг. 1 приведено схематичное изображение спускового механизма 10 с магнитным упором 30, выполненным в виде анкерной вилки. Регулирующее устройство содержит резонатор 20 с пружинным балансом 2, магнитную анкерную вилку 30 и анкерный колесный узел 40, включающий в себя магнитное анкерное колесо 400. Магнит 3 анкерной вилки взаимодействует с концентрическими намагниченными дополнительными дорожками 43IΝΤ и 43ЕХТ анкерного колесного узла 40, создавая отталкивающее усилие.
Символы --/-/+/++на дополнительных дорожках 43 обозначают интенсивность намагничивания, которая увеличивается от -- до ++; магнит 3 анкерной вилки 30 слегка отталкивается на участках --, но отталкивается с большим усилием на участках ++.
В блок-схеме на фиг. 1 сила взаимодействия упора 30 с анкерный колесный узел 40 возникает в результате взаимодействия между полюсным башмаком 3, в частности магнитом, закрепленным на анкерной вилке 30, и намагниченной структурой, нанесенной на анкерный колесный узел 40. Эта намагниченная структура состоит из двух дополнительных дорожек 43 (внутренней дорожки 43INT и внешней дорожки 43ЕХТ), интенсивность намагничивания которых изменяется в зависимости от углового положения для создания потенциала магнитного взаимодействия, показанного на фиг. 2. Вдоль каждой из дополнительных дорожек 43 можно увидеть последовательность рамп 45 и потенциальных барьеров 46, как показано на фиг. 3. Влияние рамп 45 заключается в отборе энергии от анкерного колесного узла 40, а влияние барьеров 46 - в блокировании движения колесного узла 40. Энергия, забираемая рампой 45, впоследствии возвращается на резонатор пружинного баланса 20, когда анкерная вилка 30 отклоняется и перемещается из одного положения в другое.
На фиг. 2 представлена принципиальная схема изменения потенциальной энергии магнитного взаимодействия, испытываемого магнитом 3 анкерной вилки 30 в зависимости от положения на анкерном колесном узле 40. Пунктирная линия показывает траекторию базовой точки M магнита 3 анкерной вилки 30 во время работы.
На фиг. 3 показана принципиальная схема изменения потенциальной энергии при перемещении вдоль намагниченных дополнительных дорожек 43 колесного узла 40. Когда полюсный башмак 3 анкерной вилки проходит из точки Р1 в точку Р2 на внутренней дополнительной дорожке 43INT, система отбирает энергию от анкерного колесного узла 40 и сохраняет ее в форме потенциальной энергии. Затем система останавливается в точке Р2 в результате совместного воздействия потенциального барьера 46 и трения в колесном узле 40. И, наконец, когда анкерная вилка 30 отклоняется в результате воздействия пружинного баланса 2 на противоположную сторону анкерной вилки 30, ранее сохраненная энергия возвращается на резонатор 20 пружинного баланса 2, при переходе системы от точки Р2 к точке Р3, что соответствует смене дорожки, когда полюсный башмак 3 перемещается в точку Р3 на внешней дополнительной дорожке 43ЕХТ. Затем тот же самый цикл повторяется на другой дополнительной дорожке 43ЕХТ, во время которого система переходит от точки Р3 к точке Р4 и от точки Р4 к точке Р5, возвращаясь в точку Р5 на внутренней дорожке 43INT.
В данном магнитном исполнении первого варианта реализации форма потенциального магнитного взаимодействия такова, что:
- потенциальные рампы 45 рассчитаны таким образом, что энергия, поступающая на резонатор 20 пружинного баланса, достаточна для поддержания его движения;
- высота потенциальных барьеров 46 достаточна для блокировки движения системы.
Трение в колесном узле 40 дает возможность остановить движение системы в основании потенциального барьера 46.
Для обеспечения безопасности анкерной вилки при неожиданном ударном воздействии предпочтительно предусмотреть механический упор, установленный непосредственно за каждым магнитным потенциальным барьером 46 (данные механические упоры не показаны на фиг. 1), чтобы избежать возникновения избыточного усилия при оттягивании. При нормальной работе магнитная анкерная вилка 30 никогда не касается механических упоров. Однако в случае ударного воздействия, являющегося достаточно большим, чтобы система перешла потенциальный барьер 46, данные механические упоры могут блокировать систему, чтобы избежать потери шага.
В рассматриваемом варианте, количество энергии, передаваемой на резонатор 20 пружинного баланса, всегда является практически одинаковым, при условии, что потенциальные барьеры 46 намного круче, чем энергетические рампы 45. Это условие легко обеспечить на практике.
Качание анкерной вилки 30 отделяется от движения анкерного колесного узла 40. Более конкретно, при движении анкерной вилки 30 потенциальная энергия может быть возвращена на резонатор 20 пружинного баланса 2, даже если анкерный колесный узел 40 остается неподвижным. Таким образом, импульсное быстродействие не ограничивается инерцией анкерного колесного узла 40.
Для создания потенциала, показанного на фиг. 1, может быть предложено несколько решений. Нанесенная на анкерное колесо намагниченная структура (неограничивающим образом) может быть выполнена в виде:
- намагниченного слоя переменной толщины;
- намагниченного слоя постоянной толщины, но переменной намагниченности;
- микромагнетиков с изменяемой поверхностной плотностью;
- ферромагнитного слоя переменной толщины (в случае, если действующая сила всегда является силой притяжения);
- ферромагнитного слоя изменяющегося профиля и/или формы (штампованной, вырезанной);
- ферромагнитного слоя с переменной плотностью поверхности отверстия;
вышеуказанные технические решения могут быть объединены.
Второй вариант реализации представлен на фиг. 4-10. Этот второй вариант работает аналогично вышеописанному первому варианту. Основные различия заключаются в следующем:
- имеется единая намагниченная структура 3А, 3В, служащая для воспроизведения одинакового потенциала взаимодействия при смене рамп и барьеров, как это показано на фиг. 2 и 3 для первого варианта реализации;
- магниты 49 анкерного колеса 400 располагаются между магнитами 31 и 32 анкерной вилки 30, так что возникающие отталкивающие силы в осевом направлении компенсируют друг друга. Таким образом, в плоскости анкерного колесного узла 40 остается только составляющая силы, являющаяся полезной для работы спускового механизма.
Предпочтительно, полюсный башмак 3 должен находиться не точно над дорожкой 50 (или 43, в зависимости от ситуации), а быть немного смещен в поперечном направлении DT относительно оси соответствующей дорожки, таким образом, чтобы в результате взаимодействия колесного узла 40 и полюсного башмака 3 постоянно возникала небольшая поперечная составляющая силы, удерживающая упор 30 в требуемом положении. Величина вышеуказанного смещения регулируется таким образом, чтобы создаваемая сила удерживала полюсный башмак 3 неподвижно в каждом из его крайних положений, на первой и на второй половинах перемещения.
На фиг. 4 изображено регулирующее устройство, содержащее резонатор 20 пружинного баланса 2, магнитную анкерную вилку 30 и магнитное анкерное колесо 40. Анкерный колесный узел 40 содержит дорожку с магнитами 49 различной интенсивности, которые взаимодействуют с двумя магнитами 31 и 32 анкерной вилки 30. Как показано на фиг. 4, магниты 49 расположены в порядке увеличения намагниченности (в частности, в порядке увеличения размера магнитов), таким образом, чтобы образовать рампы 45 (с Р11 по P18) перед барьерами 46, выполненными, например, в виде нескольких магнитов Р20.
Большая часть усилия оттягивания создается небольшим изменением положения в поперечном направлении полюсного башмака 3 относительно дорожки 50, с которой он взаимодействует. Более конкретно, когда упор 30 находится в конце первой половины перемещения (PDC) или в конце второй половины перемещения (DDC), положение в поперечном направлении полюсного башмака 3, взаимодействующего с дорожкой 50, изменяется (за счет небольшого перемещения в поперечном направлении) таким образом, что полюсный башмак 3 подвергается воздействию поперечной силы, или оттягивающего усилия, которое является достаточным для удержания его в неподвижном состоянии в крайнем положении. В тот момент, когда резонатор 20 инициирует качание упора 30, он должен преодолеть это оттягивающее усилие до того, как магнитная или электростатическая сила начнет приводить упор 30 в движение после качания, и, таким образом, осуществит передачу накопленной потенциальной энергии на резонатор 20. Эффект оттягивания, получаемый в результате сдвига в поперечном направлении на 2 мм, показан на фиг. 28 для конкретного варианта реализации изобретения, представленного на фиг. 26 и 27.
Разумеется, в спусковом механизме согласно настоящему изобретению резонатор 20, в частности, баланс 2, создает начальный импульс для воздействия на упор 30. Однако, после того, как усилие оттягивания преодолено, в действие вступают магнитные или электростатические силы, которые осуществляют перемещение полюсного башмака 3 в поперечном направлении в его новое положение.
Предпочтительно, по меньшей мере один магнит 48 должен быть сдвинут (в данном случае, помещен на большем радиусе, чем радиус центральной линии рампы 45), что усиливает эффект оттягивания непосредственно перед барьером 46. Влияние рамп 45 и барьеров 46 аналогично влиянию в первом варианте реализации изобретения, и плотность их распределения аналогична показанной на фиг. 2.
На фиг. 5 более подробно показано расположение магнитов 31 и 32 на анкерной вилке относительно магнитов 49 анкерного колесного узла 40.
На фиг. 26 показан вариант реализации изобретения, аналогичный варианту, представленному на фиг. 4, но содержащий два концентрических ряда магнитов увеличивающейся интенсивности намагничивания, на внутренней дорожке 43INT, поляризованной вверх, и на внешней дорожке 43ЕХТ, поляризованной вниз, причем полюсные башмаки 3 имеют противоположные конфигурации: верхний внутренний полюсный башмак 3SINT поляризован вниз, верхний внешний полюсный башмак 3SEXT поляризован вверх, нижний внутренний полюсный башмак 3IINT поляризован вниз, и нижний внешний полюсный башмак 3IEXT поляризован вверх. На фиг. 27 представлена принципиальная схема ориентации силовых линий магнитного поля в поперечном сечении, соответствующей данному варианту реализации, в котором силовые линии магнитного поля по существу перпендикулярны плоскости РР колеса 40 в магнитах и по существу параллельны данной плоскости в каждом воздушном зазоре 5. Получаемый потенциал, как видно из фиг. 28, содержит чередующиеся рампы и барьеры.
В указанном втором варианте реализации анкерная вилка 30 отклоняется. Предпочтительно, в конкретный момент времени над поверхностью 4 магнитов 49 анкерного колесного узла 40 может находиться не более чем один полюсный башмак 3А или 3В.
На фиг. 6 показано, каким образом можно усилить концентрацию поля в воздушном зазоре 5, для варианта реализации с помощью магнитов:
- в варианте А магниты противоположной полярности размещены по схеме "голова к хвосту" на обеих сторонах воздушного зазора 5, каждая точка которого при этом испытывает воздействие противоположных полярностей магнитов;
- в варианте В эффективность по меньшей мере одного магнита, в данном случае, верхнего магнита, увеличивается с помощью по меньшей мере одного магнита, установленного в поперечном направлении DT относительно его поля;
- в варианте С имеются два воздушных зазора с обеих сторон магнита (так же, как показано на фиг. 5), образованных двумя узлами магнитов, как в вышеописанном варианте В;
- в варианте D поле перемещается сквозь ферромагнитную или намагниченную соединительную планку, соединяющую данные поперечные магниты и расположенную в одном направлении с их направлением намагничивания (для намагниченной планки).
В этом примере с чисто магнитными элементами могут быть применены несколько решений для обеспечения магнитного взаимодействия упора 30 (в частности, анкерной вилки) и анкерного колесного узла 40 (в частности, анкерного колеса). Четыре неограничивающие возможные конфигурации представлены на фиг. 7-10. Преимущество конфигураций, показанных на фиг. 9 и 10, заключается в лучшем ограничении линий магнитного поля, что играет важную роль в уменьшении чувствительности системы к воздействию внешних магнитных полей.
Как показано на фиг. 7, нанесенная на анкерное колесо намагниченная структура переменной толщины или переменной интенсивности взаимодействует с магнитным полем, создаваемым магнитным контуром, выполненным заодно с анкерной вилкой. Взаимодействие может быть отталкивающим или притягивающим.
Как показано на фиг. 8, ферромагнитная структура переменной толщины (или с изменяемым воздушным зазором) взаимодействует с магнитным полем, создаваемым магнитным контуром, выполненным заодно с анкерной вилкой.
На фиг. 9 показаны две намагниченные структуры переменной толщины или интенсивности, нанесенные на обе стороны анкерного колеса, которые взаимодействуют с магнитным полем, создаваемым магнитом, выполненным заодно с анкерной вилкой, или магнитным контуром без источника поля, выполненным заодно с анкерной вилкой. Взаимодействие может быть отталкивающим или притягивающим.
На фиг. 10 показаны две ферромагнитные структуры переменной толщины (или с изменяющимся воздушным зазором), нанесенные на обе стороны анкерного колеса, которые взаимодействуют с магнитным полем, создаваемым магнитом или магнитным контуром с источником поля, выполненным заодно с анкерной вилкой.
На противоположной стороне полюсного башмака 3 (или полюсных башмаков 3, если упор содержит несколько башмаков) упор 30, в частности анкерная вилка, содержит средство для взаимодействия с резонатором 20 (в частности, с пружинным балансом 2), которое взаимодействует с резонатором для инициирования поперечного перемещения полюсного башмака 3. Как известно из уровня техники, данное средство для взаимодействия может использовать механический контакт, такой как анкерная вилка, взаимодействующая с осью баланса. Можно предусмотреть экстраполяцию предлагаемого настоящим изобретением взаимодействия упора с анкерным колесным узлом до взаимодействия резонатора с упором, что могло бы обеспечить возможность использования магнитной или электростатической силы для данного взаимодействия с целью дальнейшего уменьшения трения. Еще одно преимущество исключения из схемы оси баланса заключается в возможности взаимодействия в угловом диапазоне более 360°, например, с винтовой дорожкой.
В конкретном варианте реализации изобретения полюсный башмак 3 является симметричным в поперечном направлении.
В способе исполнения, базирующемся на втором варианте реализации (см. фиг. 4), удовлетворительные результаты достигаются при следующих значениях параметров:
- Момент инерции анкерного колеса: 2*10-5 кг*м2;
- Вращающий крутящий момент: 1*10-2 Н*м;
- Момент инерции баланса: 2*10-4 кг*м2;
- Коэффициент упругости спиральной пружины: 7*10-4 Н*м;
- Частота резонатора: 0,3 Гц;
- Коэффициент качества резонатора: 20;
- Высота энергетической рампы: 2*10-3 Дж;
- Высота энергетического барьера: 8*10-3 Дж;
- Магниты:
- полюсные башмаки на анкерной вилке выполняются из четырех прямоугольных NdFeB (неодим-железо-бор) магнитов размером 5×5×2,5 мм;
- дорожка выполняется из рамп и барьеров следующим образом: полевые рампы изготовляются из цилиндрических магнитов NdFeB диаметром 1,5 мм, высотой от 0 до 4 мм, а каждый барьер выполняется из четырех цилиндрических магнитов NdFeB диаметром 2 мм, высотой 4 мм.
На фиг. 29-34 показана конструкция спускового механизма согласно настоящему изобретению.
Как будет показано ниже, этот спусковой механизм 10 часов содержит упор 30, располагающийся, с одной стороны, между резонатором 20 и, с другой стороны, первым анкерным колесным узлом 40А и вторым анкерным колесным узлом 40В, на каждый из которых действует крутящий момент. Более конкретно, каждый из этих анкерных колесных узлов 40А, 40В имеет свою собственную зубчатую передачу.
Настоящее изобретение рассматривается на примере конкретного варианта, являющегося перспективным, который содержит только два по существу установленных в одной и той же плоскости анкерного колесного узла 40. Однако варианты реализации могут включать большее количество анкерных колесных узлов, в частности, установленных на нескольких параллельных уровнях, и взаимодействующих с таким же количеством уровней одного и того же упора, взаимодействующего с резонатором. Настоящее изобретение позволяет также использовать трехмерные архитектуры, поскольку взаимодействие между упором 30 и колесными узлами не обязательно должно происходить в плоскости.
Согласно настоящему изобретению, и предпочтительно, каждый из анкерных колесных узлов 40А, 40В содержит по меньшей мере одну намагниченную или ферромагнитную или, соответственно, электрически заряженную или электростатическую электропроводную дорожку 50, с периодом прохождения PD, в течение которого магнитные или, соответственно, электростатические характеристики повторяются.
Упор 30 содержит по меньшей мере один намагниченный или ферромагнитный или, соответственно, электрически заряжаемый или электростатически проводящий полюсный башмак 3, который может перемещаться в поперечном направлении DT относительно направления перемещения DD по меньшей мере одного элемента поверхности 5 дорожки 50, обращенной к упору 3. По меньшей мере один из элементов, а именно полюсный башмак 3 или дорожка 50, или, возможно, оба данных элемента создают магнитное или электростатическое поле в воздушном зазоре 5 между указанным по меньшей мере одним полюсным башмаком 3 и указанной по меньшей мере одной поверхностью 4.
Полюсный башмак 3 встречается с барьером 46 магнитного или электростатического поля на дорожке 50 непосредственно перед каждым поперечным перемещением упора 30; данное поперечное перемещение обеспечивается периодическим срабатыванием резонатора 20.
На первый анкерный колесный узел 40А действует первый крутящий момент, а на второй анкерный колесный узел 40В действует второй крутящий момент; каждый из указанных узлов может по очереди взаимодействовать с упором 30. Первый колесный узел 40А и второй колесный узел 40В соединены друг с другом посредством прямой кинематической связи. Предпочтительно первый анкерный колесный узел 40А и второй анкерный колесный узел 40В вращаются относительно различных осей D1, D2, которые параллельны друг другу.
Для данного естественного спускового механизма применимы все описанные выше и представленные на чертежах конкретные устройства, но для обеспечения ясности на чертеже представлена лишь его общая архитектура.
В предпочтительном варианте реализации спусковой механизм 10 содержит средство для минимизации люфта прямой кинематической связи между первым анкерным колесным узлом 40А и вторым анкерным колесным узлом 40В, с целью минимизации люфта во время работы.
В конкретном варианте реализации спусковой механизм 10 встроен в часовой механизм 100, содержащий средство для подачи первого крутящего момента на первый анкерный колесный узел 40А и второго крутящего момента на второй анкерный колесный узел 40В. В частности, первый крутящий момент может быть равен второму крутящему моменту.
Предпочтительно, как показано на фиг. 29 и 30, первый анкерный колесный узел 40А и второй анкерный колесный узел 40В синхронно и в противоположных направлениях вращаются относительно своих указанных осей D1, D2.
В предпочтительном варианте реализации первый анкерный колесный узел 40А и второй анкерный колесный узел 40В установлены на расстоянии друг от друга, а упор 30 содержит два полюсных башмака 3, также установленных на расстоянии друг от друга, причем первый полюсный башмак 3А взаимодействует с первым анкерным колесным узлом 40А, а второй полюсный башмак 3В взаимодействует со вторым анкерным колесным узлом 40В.
Предпочтительно спусковой механизм 10 устроен таким образом, что в каждый момент времени по меньшей мере один полюсный башмак 3 упора 30 взаимодействует по меньшей мере с одной поверхностью 4 одного из анкерных колесных узлов 40А; 40В.
Предпочтительно барьеры 46, предусмотренные на первом анкерном колесном узле 40А и втором анкерном колесном узле 40В, равномерно распределены по анкерным колесам с одинаковым шагом, причем барьеры первого анкерного колесного узла 40А смещены на полшага относительно барьеров второго анкерного колесного узла 40В.
Как уже указывалось выше, по меньшей мере на одном из анкерных колесных узлов 40А; 40В или на обоих указанных анкерных колесных узлах каждая дорожка 50 содержит расположенную рядом с барьером 46 и установленную перед каждым барьером 46 рампу 45, проходящую в криволинейном рамповом направлении DR и взаимодействующую (по нарастающей, от нижней части 451 к верхней части 452 рампы) с полюсным башмаком 3 с помощью магнитного или, соответственно, электростатического поля, интенсивность которого изменяется таким образом, чтобы создавать увеличивающуюся потенциальную энергию; рампа 45 берет энергию от соответствующего анкерного колесного узла 40А, 40В.
Предпочтительно анкерный колесный узел 40А, 40В содержит, между двумя последовательными рампами 45, потенциальный барьер магнитного или, соответственно, электростатического поля 46, служащий для инициирования паузы в движении анкерного колесного узла 40А, 40В перед отклонением упора 30 в результате периодического воздействия осциллятора 20.
В конкретном варианте исполнения по меньшей мере один из анкерных колесных узлов 40А/40В (или, более конкретно, оба данных узла) содержат в конце каждой рампы 45 и непосредственно перед каждым барьером 46 радиальное изменение распределения магнитного или электростатического поля, если поверхность 4 намагничена или электрически заряжена, или изменение профиля, если указанная поверхность 4 является ферромагнитной или, соответственно, электростатически проводящей; данное радиальное изменение служит для оттягивания полюсного башмака 3, влияние которого заключается в удержании упора 30 в одном из его устойчивых положений перед тем, как будет инициировано его отклонение.
В частности, резонатор 20 содержит ось, такую как ось баланса или аналогичную, взаимодействующую с вилкой или исполнительным механизмом, содержащемся в упоре 30, с целью освобождения (выключения вышеуказанного оттягивания) с последующим отклонением полюсного башмака 3 упора 30 в направлении по касательной к плоскости, определяемой осями D1, D2 первого анкерного колесного узла 40А и второго анкерного колесного узла 40В, когда данные оси D1 и D2 лежат в одной плоскости.
В частности, при таком отклонении полюсный башмак 3 упора 30 перемещается с верхнего уровня 452 первой рампы 45 на нижний уровень 451 второй рампы 45, расположенной рядом с указанной первой рампой, таким образом, что данный полюсный башмак 3 подвергается воздействию оттягивающей силы магнитного или, соответственно, электростатического происхождения.
В частности, полюсный башмак 3 упора 30 может перемещаться на первом анкерном колесном узле 40А и на втором анкерном колесном узле 40В между двумя симметричными поверхностями с одинаковыми магнитными или, соответственно, электростатическими характеристиками и на одинаковом расстоянии от этих поверхностей.
В частности, по меньшей мере один из анкерных колесных узлов 40А/40В или оба данных анкерных колесных узла содержат между двумя установленными друг за другом рампами 45 одной и той же дорожки 50 или двух соседних дорожек 50 в направлении перемещения DD потенциальный барьер магнитного или, соответственно, электростатического поля 46, служащий для инициирования паузы в работе соответствующего анкерного колесного узла 40А, 40В перед отклонением упора 30 в результате периодического воздействия осциллятора 20.
Предпочтительно напряженность поля каждого потенциального барьера 46 является более высокой, чем напряженность поля каждой рампы 45.
В частности спусковой механизм 10 накапливает потенциальную энергию, получаемую от указанного по меньшей мере одного из анкерных колесных узлов 40А, 40В в течение каждой половины периода PD, и возвращает ее на резонатор 20 между полупериодами при поперечном перемещении упора 30, инициируемом за счет периодического срабатывания резонатора 20, при котором полюсный башмак 3 переходит от первой половины поперечного перемещения PDC относительно анкерного колесного узла 40А, 40В ко второй половине поперечного перемещения DDC относительно анкерного колесного узла 40А, 40В, или наоборот.
В частности, каждый из двух противоположных компонентов, образуемых полюсным башмаком 3 и дорожкой 50 с поверхностью 4, обращенной к указанному полюсному башмаку в течение по меньшей мере части их перемещения относительно друг друга, содержит активное магнитное или, соответственно, электростатическое средство, служащее для создания магнитного или, соответственно, электростатического поля в направлении, по существу, параллельном осевому направлению DA, на поверхности сопряжения в воздушном зазоре 5 между полюсным башмаком 3 и находящейся напротив него поверхностью 4.
В частности упор 30 поворачивается относительно реальной или виртуальной оси вращения 35, и содержит единый полюсный башмак 3, взаимодействующий с первичными участками 44 указанной поверхности 4, расположенными на разных диаметрах анкерного колесного узла 40А, 40В, с которым данный полюсный башмак 3 взаимодействует переменным образом при вращении анкерного колесного узла 40А, 40В; указанные первичные участки 44 расположены попеременно на периферии анкерного колесного узла 40А, 40В и служат для ограничения перемещения полюсного башмака 3 в радиальном направлении относительно осевого направления DA, перпендикулярного как поперечному направлению DT, по существу параллельному поперечному направлению ТТ полюсного башмака 3, так и направлению перемещения DF дорожки 50.
В качестве варианта, упор 30 поворачивается относительно реальной или виртуальной оси вращения 35, и содержит несколько полюсных башмаков 3, каждый из которых взаимодействует с первичными участками 44 по меньшей мере одной из поверхностей 4, расположенными в зоне анкерного колесного узла 40А, 40В, с которым каждый из полюсных башмаков 3 взаимодействует переменным образом при вращении анкерного колесного узла 40А, 40В; указанные первичные участки 44 расположены попеременно на периферии анкерного колесного узла 40А, 40В и служат для ограничения перемещения полюсного башмака 3 в радиальном направлении относительно осевого направления DA, перпендикулярного как поперечному направлению DT, по существу параллельному поперечному направлению ТТ полюсного башмака 3, так и направлению перемещения DF дорожки 50.
В конкретном варианте исполнения указанные два анкерных колесных узла 40А, 40В являются различными по своей природе, и их взаимодействие с упором 30 также различно по своей природе. Возможно также создание гибридного спускового механизма, один из анкерных колесных узлов работающим на основе магнитного или электростатического взаимодействия, и другим анкерным колесным узлом, работающим по принципу традиционного механического взаимодействия.
В частности по меньшей мере один анкерный колесный узел 40А, 40В содержит анкерное колесо 400.
В частности, упор 30 выполнен в виде анкерной вилки.
На фиг. 31-34 вкратце представлена кинематическая схема магнитного варианта.
Как показано на фиг. 31, анкерное колесо 40В (слева) вращается до тех пор, пока не упрется в потенциальный барьер; полюсный башмак 3 упора 30, образованный анкерной вилкой, находится в верхней части потенциальной рампы.
Как показано на фиг. 32, упор 30 отклоняется, резонатор 20 (в данном случае, пружинный баланс) освобождает колесо, но впоследствии анкерная вилка перемещается за счет энергии магнитного поля.
Как показано на фиг. 33, анкерный колесный узел 40А (справа) вращается до тех пор, пока не упрется в потенциальный барьер; полюсный башмак 3 анкерной вилки находится в верхней части потенциальной рампы.
Как показано на фиг. 34, упор 30 отклоняется в противоположном направлении, резонатор 20 освобождает колесо, но впоследствии анкерная вилка перемещается за счет энергии магнитного поля.
Объектом настоящего изобретения является также часовой механизм 100 содержащий, по меньшей мере, один спусковой механизм 10 указанного типа.
Объектом настоящего изобретения являются также часы 200, содержащие по меньшей мере один такой часовой механизм 100 и/или по меньшей мере один такой спусковой механизм 10.
Подводя итоги, можно сказать, что потенциал магнитного и/или электростатического взаимодействия, создаваемый с помощью переменных рамп с барьерами, обеспечивает характеристики, наиболее близкие к рабочим характеристикам традиционного анкерного спускового механизма швейцарских часов. Оптимизация формы напряженности поля дает возможность повышения эффективности спускового механизма.
Таким образом, замена силы механического контакта бесконтактной силой магнитного или электростатического взаимодействия согласно настоящему изобретению обеспечивает несколько преимуществ, поскольку дает возможность:
- устранить трение и, тем самым, уменьшить износ и, следовательно, увеличить срок службы;
- повысить эффективность спускового механизма и, следовательно, увеличить запас хода;
- разработать переход между потенциальными рампами и барьерами для получения конкретной требуемой зависимости вращающего крутящего момента от энергии, передаваемой на резонатор. В частности, что представляет собой особый интерес, это дает возможность сделать количество энергии, передаваемой на осциллятор при каждом колебании, почти постоянным и не зависящим от вращающего крутящего момента;
- отделить отклонение упора от движения анкерного колесного узла, таким образом, что скорость импульса не ограничивается инерцией анкерного колесного узла.
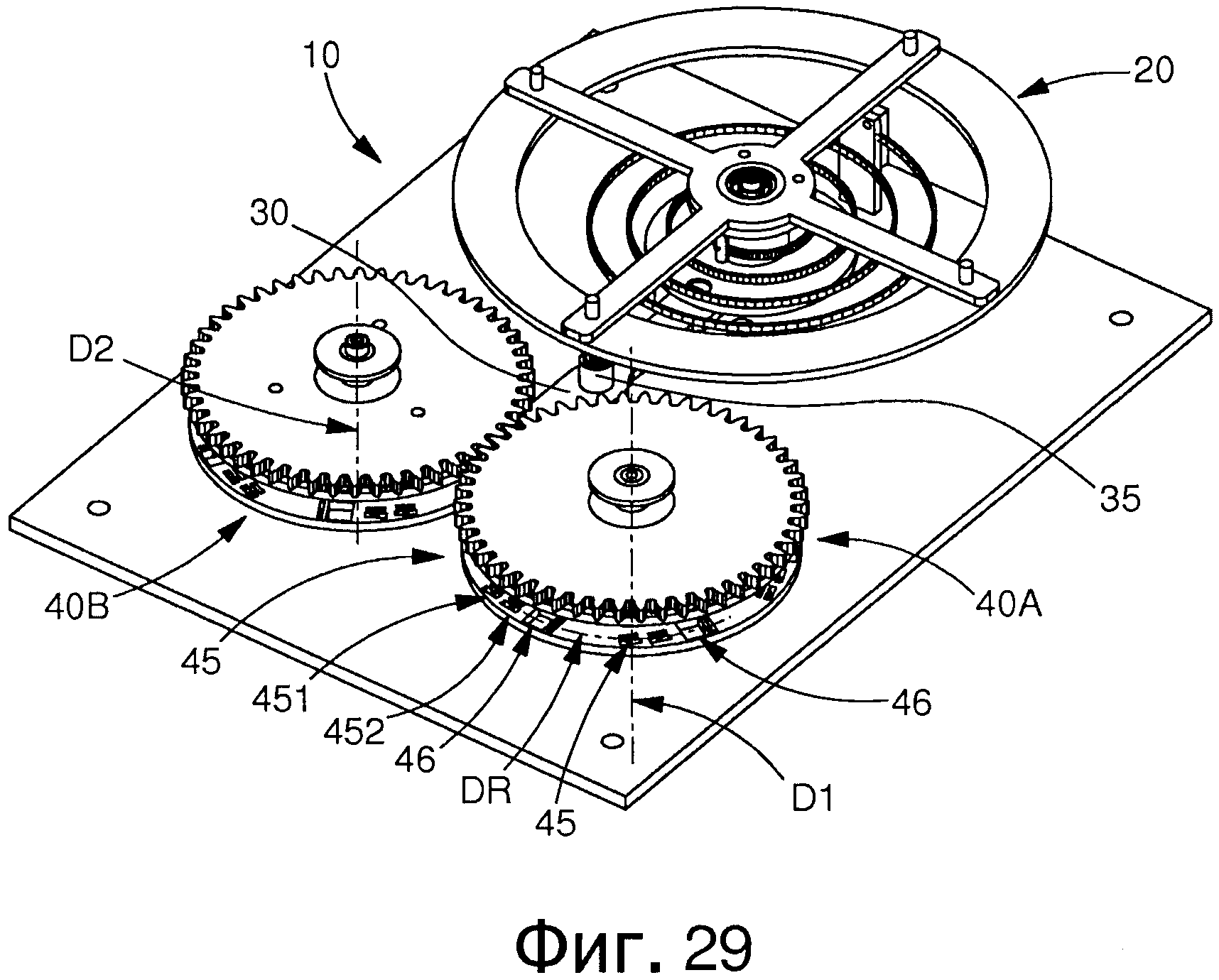
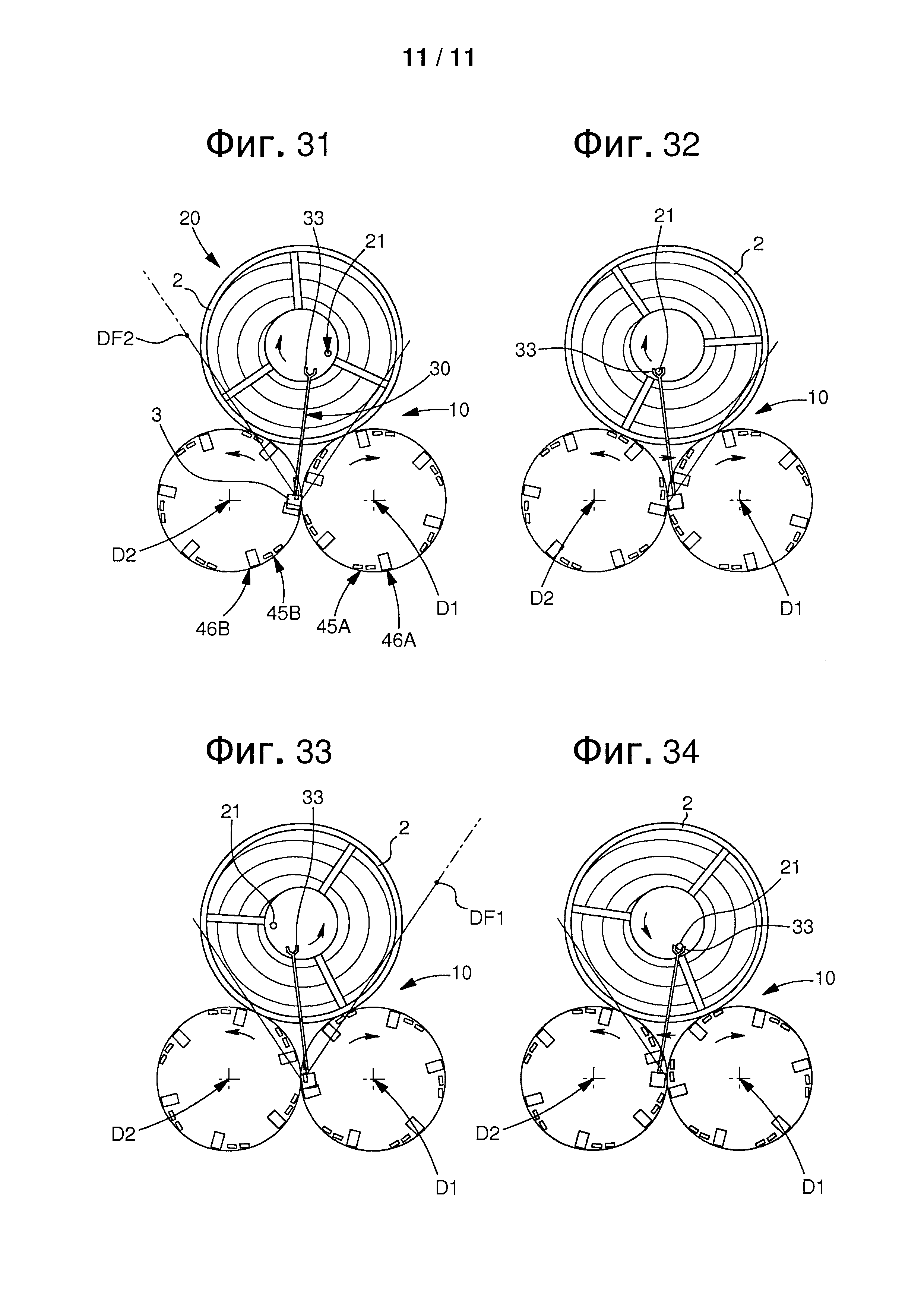
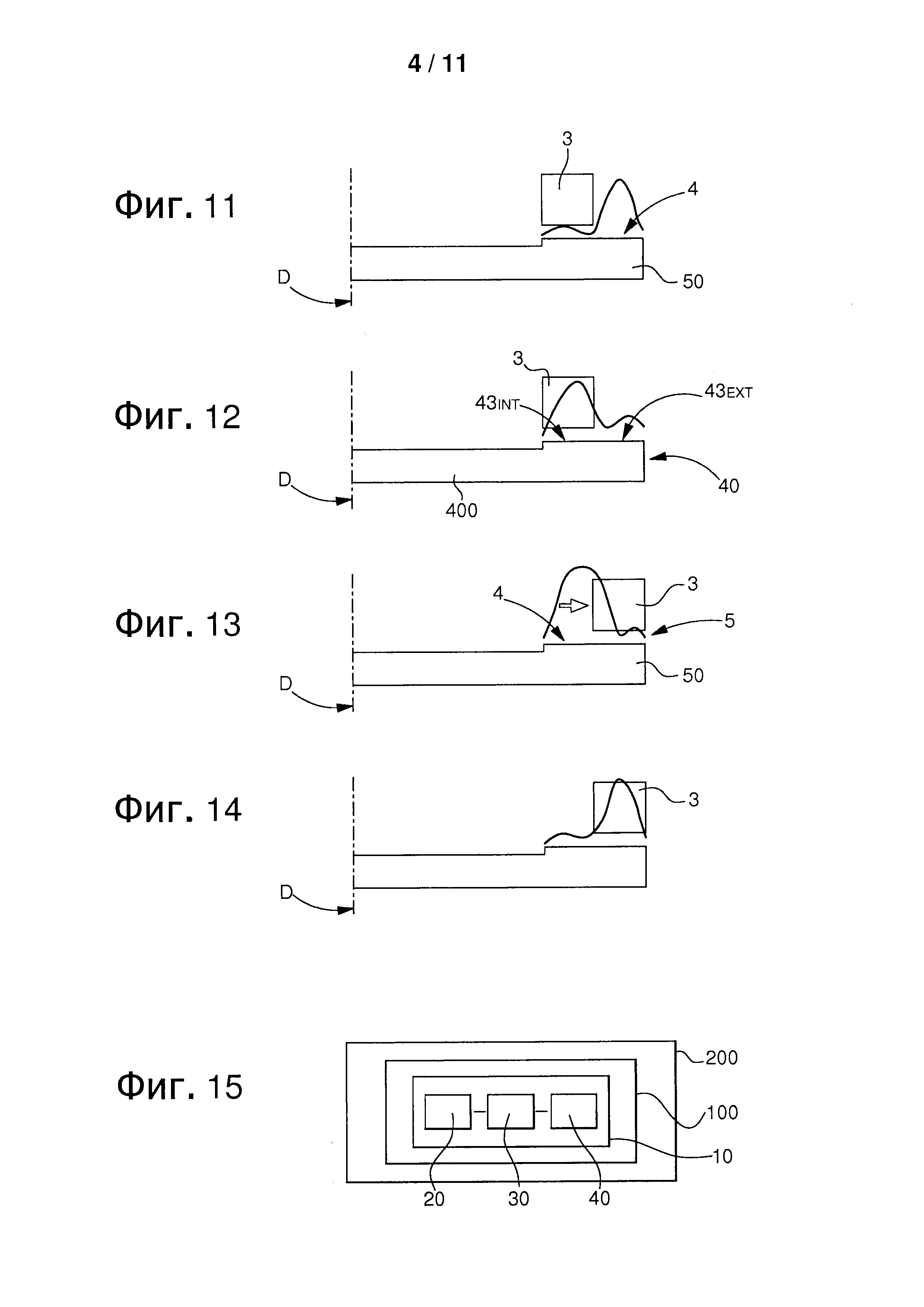
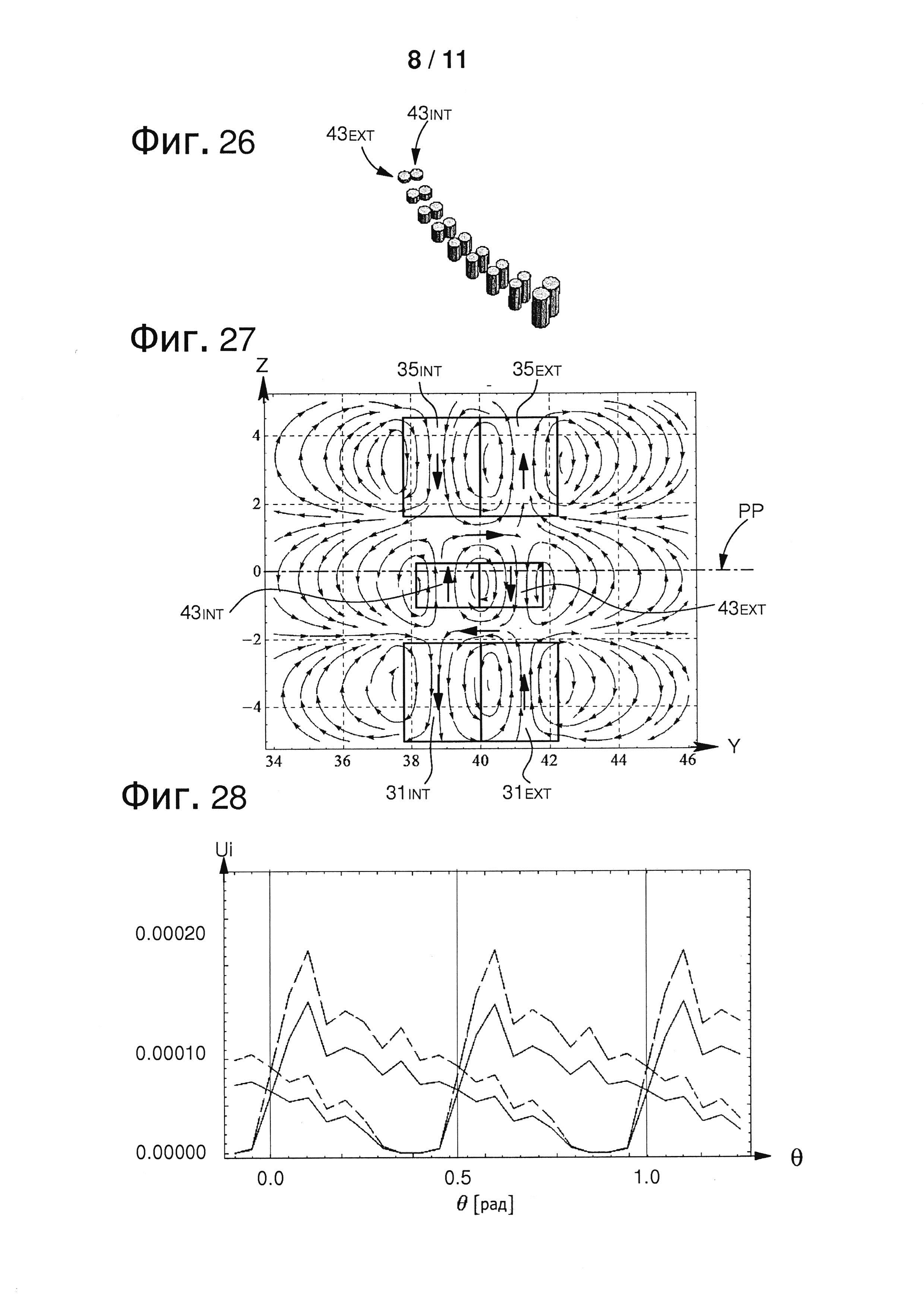
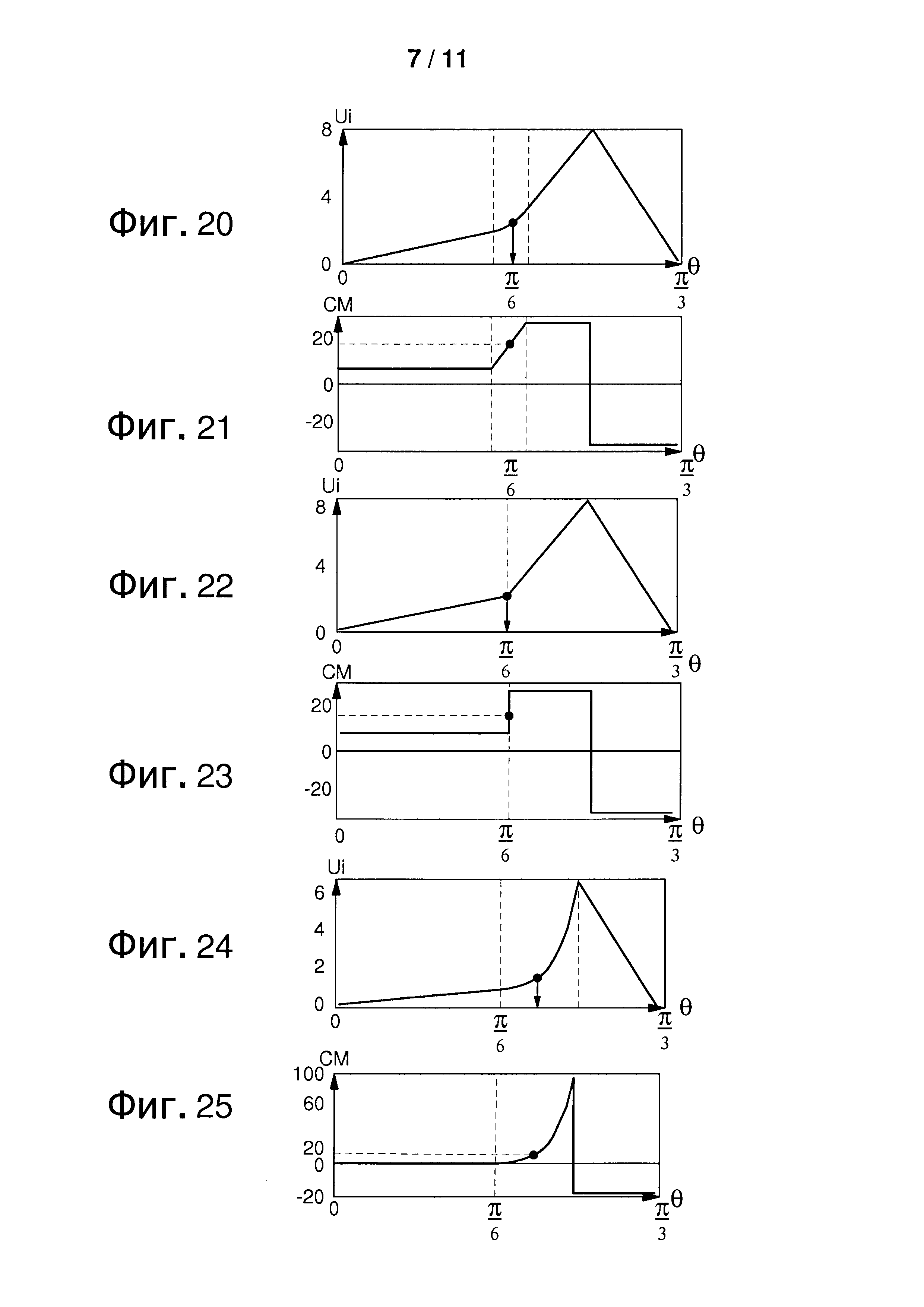
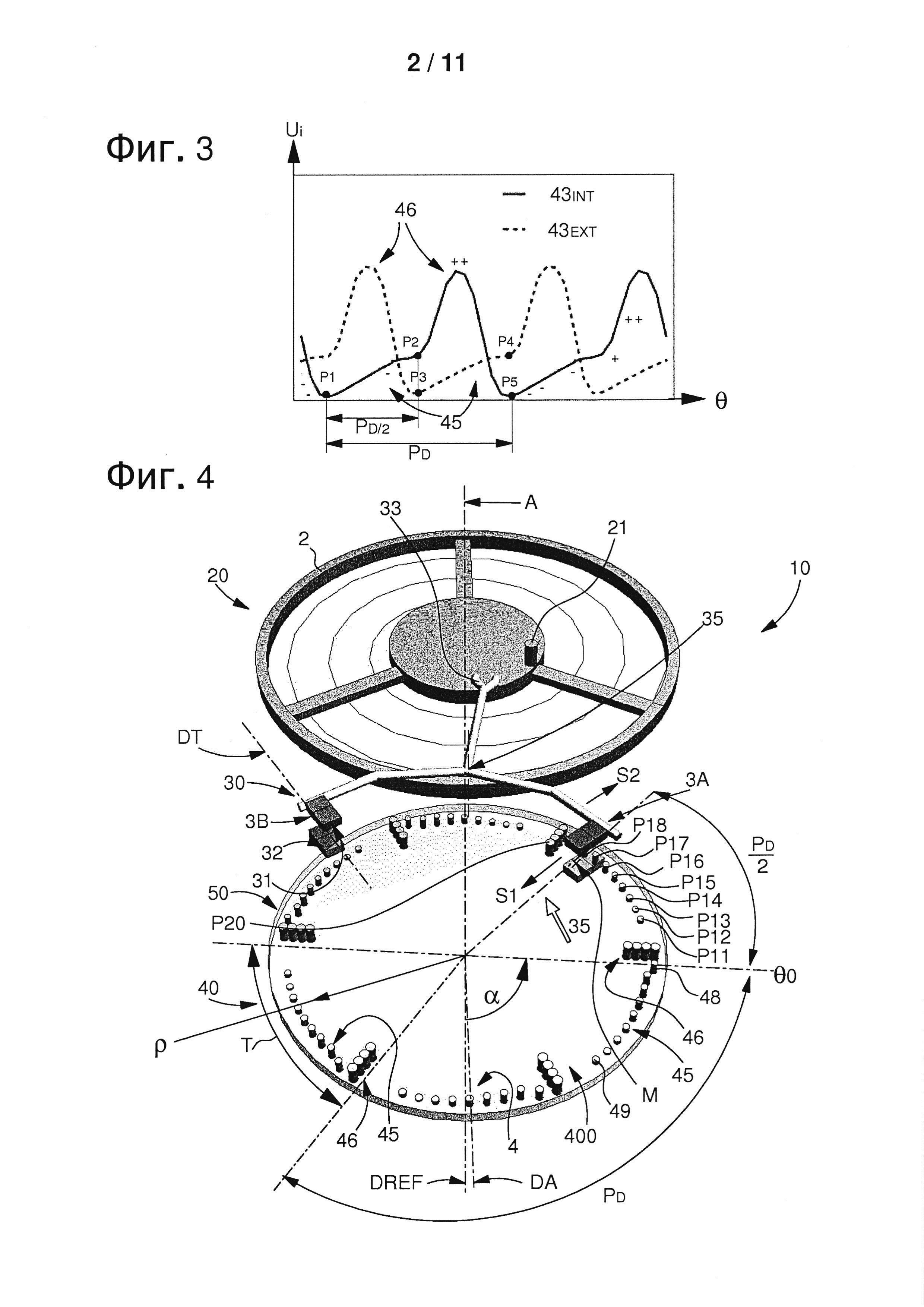
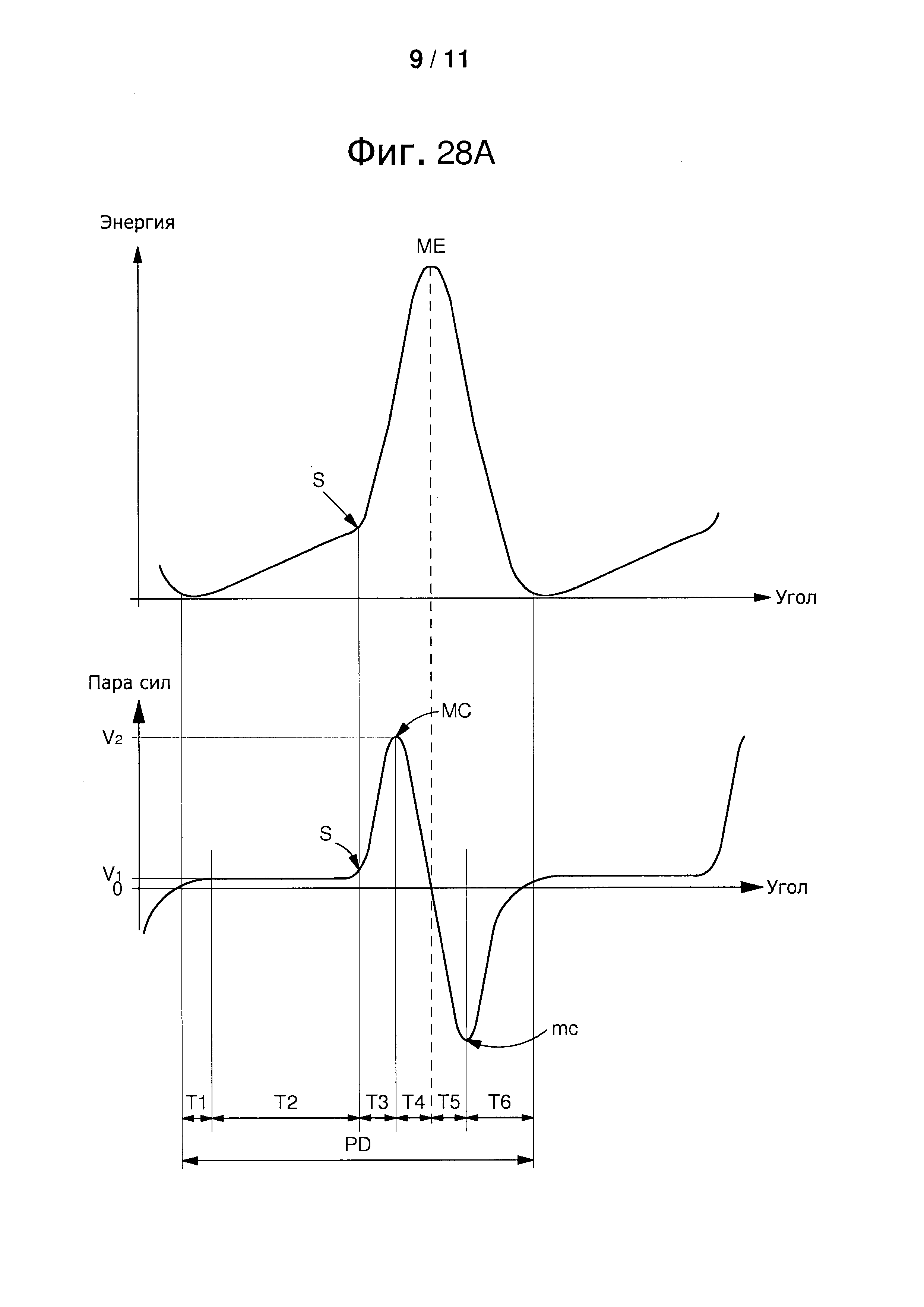
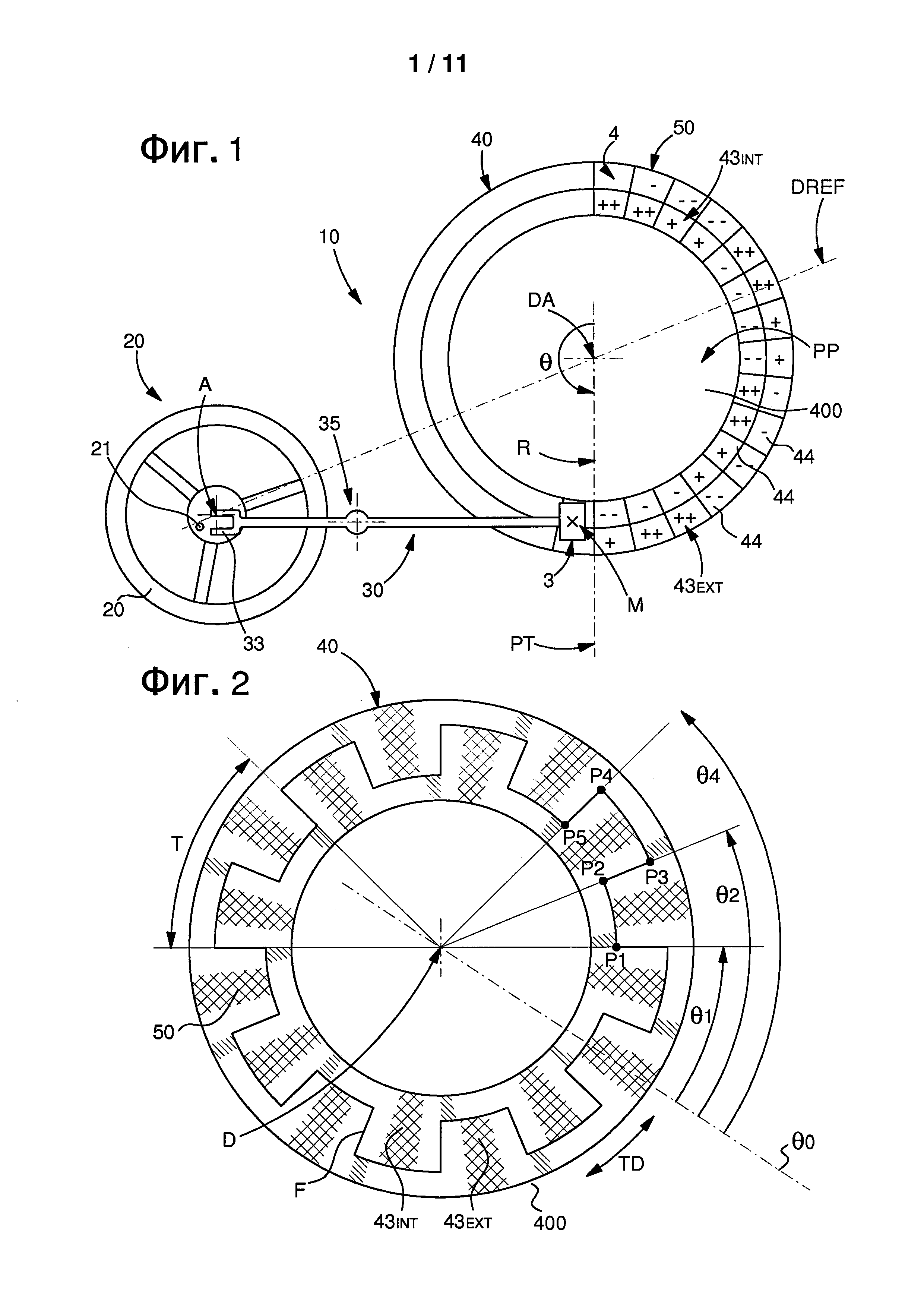
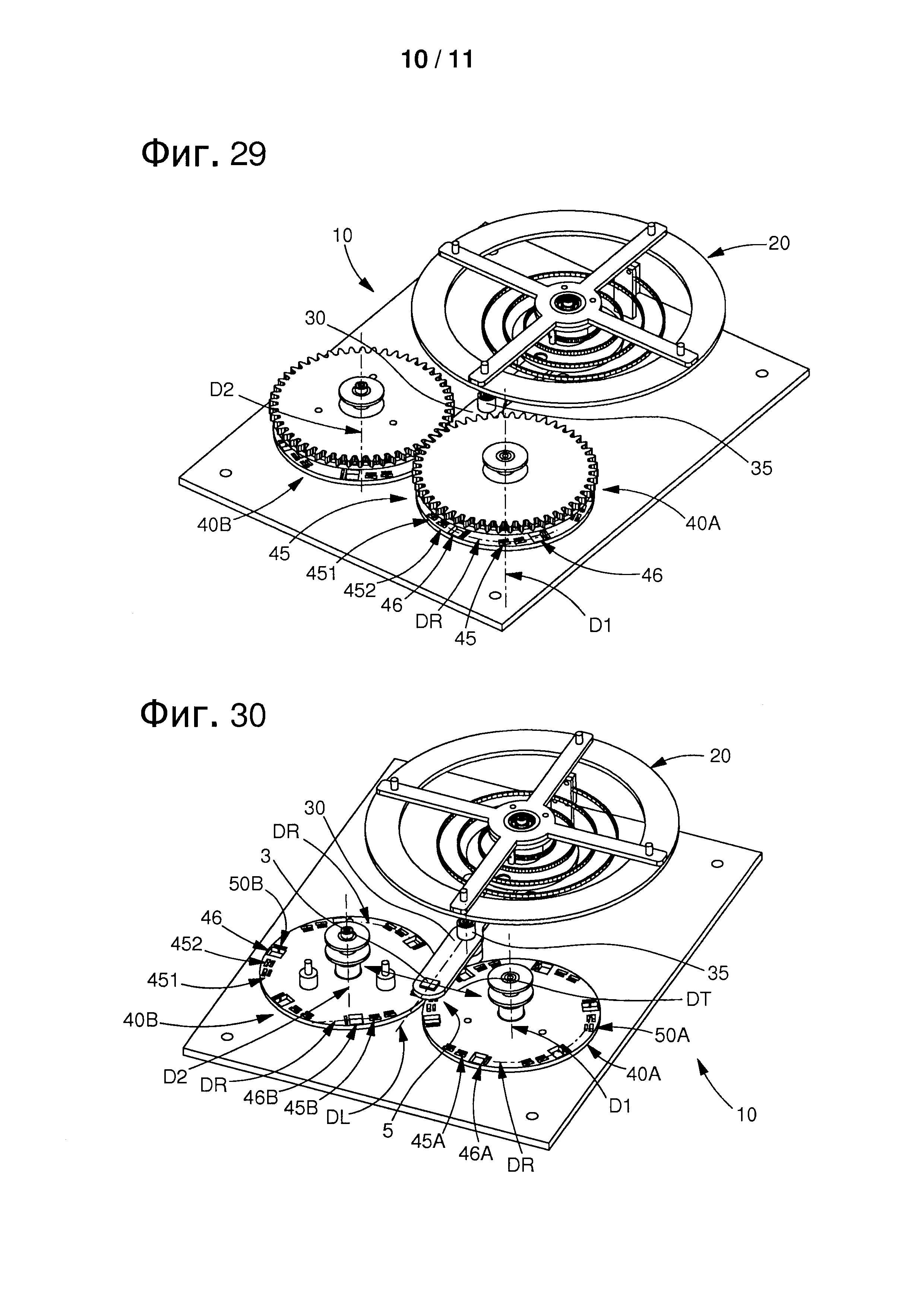
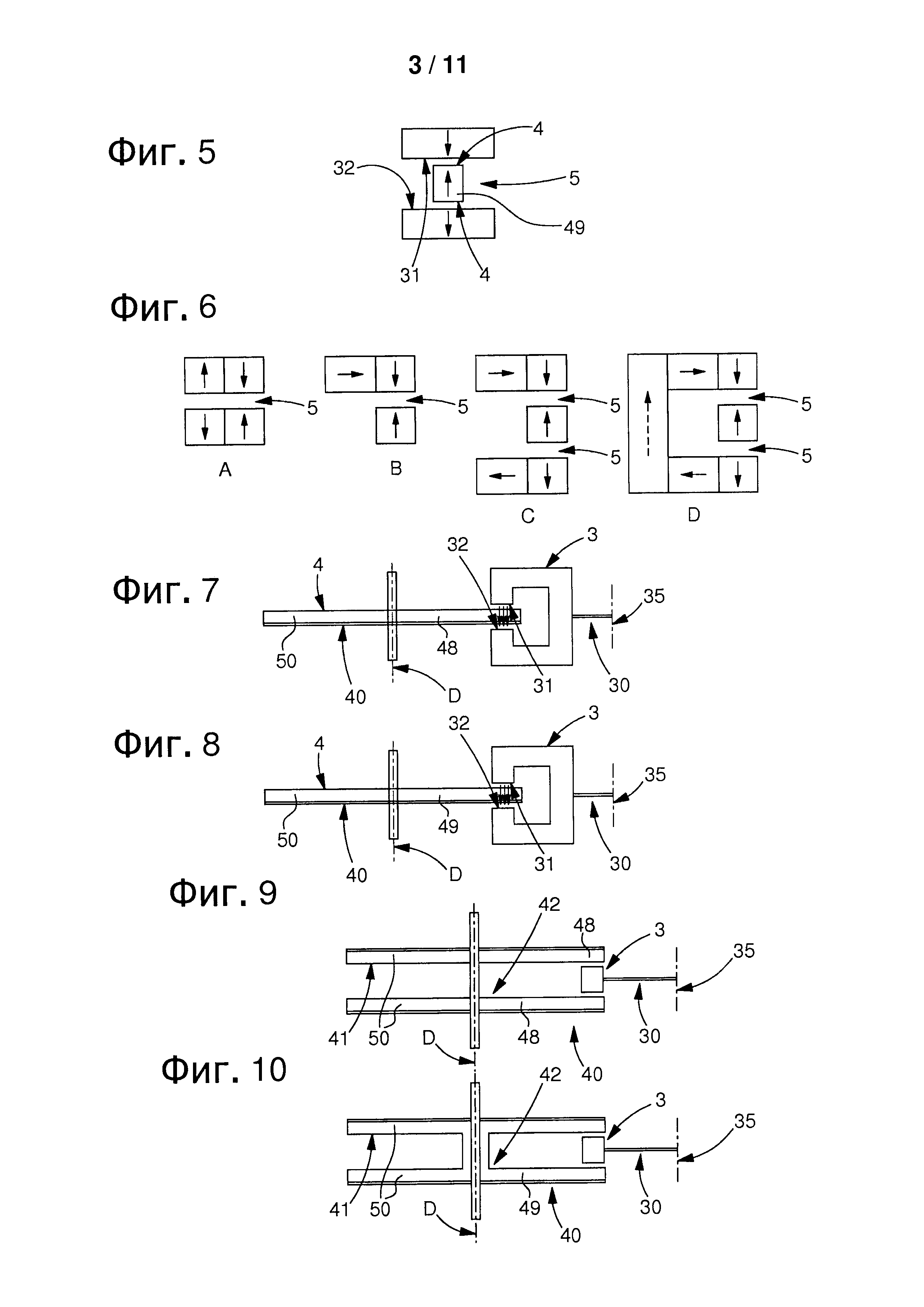
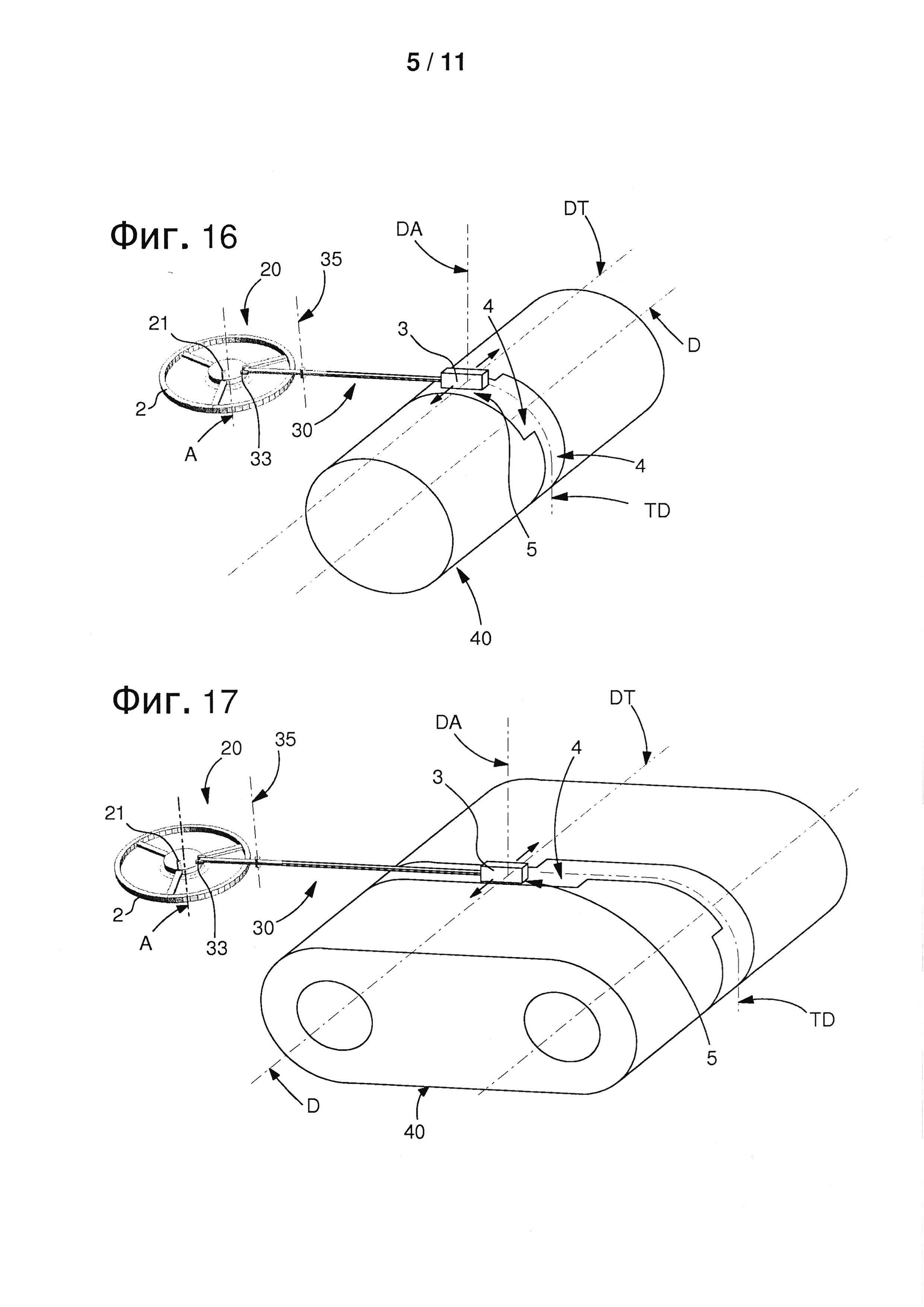
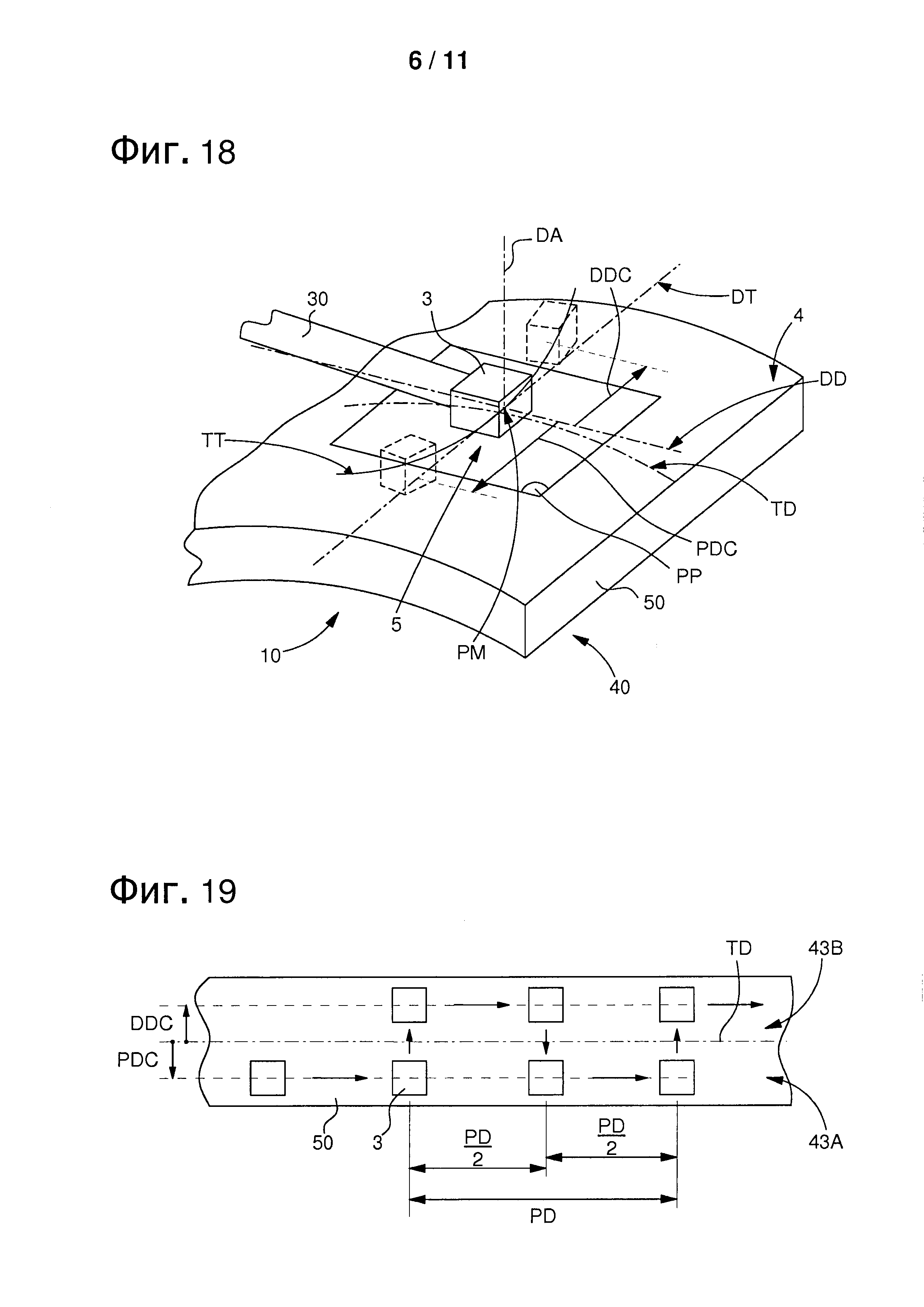
Резонатор с температурной компенсацией по меньшей мере первого и втрого порядка
Магнитный экран для балансирной пружины часов
Управляемая контактная или бесконтактная передача усилия в часах
Функциональный микромеханический узел
Способ измерения точности хода механических часов
Керамический термокомпенсированный резонатор
Способ улучшения вращения набора колёс
Способ улучшения вращения набора колёс
Подвижная опора противоударного устройства для колесной системы часового механизма
Солнечное электрическое заводное устройство для часов с автоматическим подзаводом
Регулятор скорости вращения узла колеса часового или ударного механизма
Камертонный генератор колебаний для часов
Оптимизированный спусковой механизм
Устройство регулирования угловой скорости колесного узла в часовом механизме, включающем магнитный спусковой механизм
Комбинированный резонатор с улучшенной изохронностью
Синхронизация часовых резонаторов
Часовой колебательный механизм
Механизм автоподзавода для часов
Часовой регулирующий механизм с оптимизированным магнитным спуском

