Результат интеллектуальной деятельности: Компенсатор помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы
Вид РИД
Изобретение
Изобретение относится к радиотехнике и предназначено для улучшения приема навигационного сигнала на фоне преднамеренных помех, и может быть использовано в навигационной аппаратуре потребителя (НАП) глобальной навигационной спутниковой системы (ГНСС).
Известен Обнаружитель с компенсатором помех [1], состоящий из вычитающего устройства, обнаружителя навигационного сигнала, i каналов формирования помехи, где  , имеющих первый перемножитель, второй перемножитель, измерителя амплитуды, системы слежения за фазой формирователя копии, в каждый канал формирования копии помехи введены третий перемножитель, обнаружитель помехи, система слежения за задержкой, формирователь копии помехи.
, имеющих первый перемножитель, второй перемножитель, измерителя амплитуды, системы слежения за фазой формирователя копии, в каждый канал формирования копии помехи введены третий перемножитель, обнаружитель помехи, система слежения за задержкой, формирователь копии помехи.
Недостатком данного устройства является то, что для его функционирования необходимо иметь копии компенсируемых помех, что не всегда представляется возможным.
Наиболее близкой по технической сущности является Многофункциональная адаптивная антенная решетка [2]. Она содержит N антенных элементов, N блоков комплексного взвешивания сигналов, общий сумматор и адаптивный процессор, содержащий соответствующие блоки формирования и обращения ковариационной матрицы, блок формирования управляющего вектора, отвечающий за фазирование антенной решетки в направлении прихода полезного сигнала и форму главного максимума диаграммы направленности, блок формирования вектора весовых коэффициентов, а также необходимые связи между упомянутыми элементами.
Недостатком этой решетки является то, что она позволяет формировать главный лепесток диаграммы направленности в направлении только на один источник сигнала, в то время как в системе спутниковой навигации необходимо принимать сигналы от нескольких космических аппаратов. Кроме того, в этом устройстве нет возможности оценивать направления на источники сигналов и проводить анализ принадлежности сигналов (помех) к группировке навигационных космических аппаратов.
Целью изобретения является устранение вышеизложенных недостатков и компенсация преднамеренных помех, создаваемых для НАП ГНСС, источниками которых могут быть генераторы навигационных сигналов, расположенные в воздушном пространстве или на Земле, полностью копирующие формат полезных спутниковых навигационных сигналов, использующие системную шкалу времени ГЛОНАСС и изменяющие задержки кодовой (дальномерной) псевдослучайной последовательности и доплеровский сдвиг частоты навигационных сигналов от нескольких виртуальных навигационных космических аппаратов (НКА), приводящие к неправильной информации о местоположении НКА, что отрицательно скажется на оценке координат НАП ГНСС.
Поставленная цель достигается тем, что к антенным элементам К-элементной антенной решетки, диаграммообразующей схемы, имеющей блоки весовых коэффициентов и сумматор дополнительно добавлены пеленгатор, блок задания значений диаграммы направленности в направлениях сигналов НКА и помех, блок расчета весовых коэффициентов, анализатор сигналов НКА и помех, имеющие связи между собой, выходы антенных элементов антенной решетки, соединены с соответствующими входами пеленгатора и входами блоков весовых коэффициентов диаграммообразующей схемы, выход пеленгатора соединен с одним из входов блока задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех, выход которого соединен с входом блока расчета весовых коэффициентов, имеющего выходы, соединенные с входами соответствующих блоков весовых коэффициентов диаграммообразующей схемы, выходы блока весовых коэффициентов диаграммообразующей схемы соединены с соответствующими входами сумматора, выход которого соединен с входом анализатора сигналов НКА и помех, имеющего два выхода, один из которых соединен с другим входом блока задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех, второй соединен с НАП ГНСС, при этом антенные элементы антенной решетки принимают навигационные сигналы и помехи и передают их в блоки весовых коэффициентов диаграммообразующей схемы и в пеленгатор, определяющий направления прихода навигационных сигналов и помех и передающий их в блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех, задающий значения диаграммы направленности (ДН) в направлениях прихода сигналов равными К, а в остальных направлениях - нули, блок задания значений диаграммы направленности передает эти значения в блок расчета весовых коэффициентов, который рассчитывает вектор весовых коэффициентов и передает значения вектора в блоки весовых коэффициентов диаграммообразующей схемы, которые формируют взвешенные сигналы и передают их в сумматор, где происходит их сложение и передача результирующего сигнала в анализатор сигналов НКА и помех, который проводит первичный и вторичный анализ, выявляет принадлежность поступившего сигнала к навигационному сигналу или помехе, формирует информацию о навигационных сигналах, передает ее в НАП ГНСС и формирует информацию о навигационных сигналах и помехах, передавая ее в блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех для задания значения ДН в направлениях навигационных сигналов, равными К, а в направлениях прихода помех, равными нулю.
Сущность изобретения поясняется чертежами.
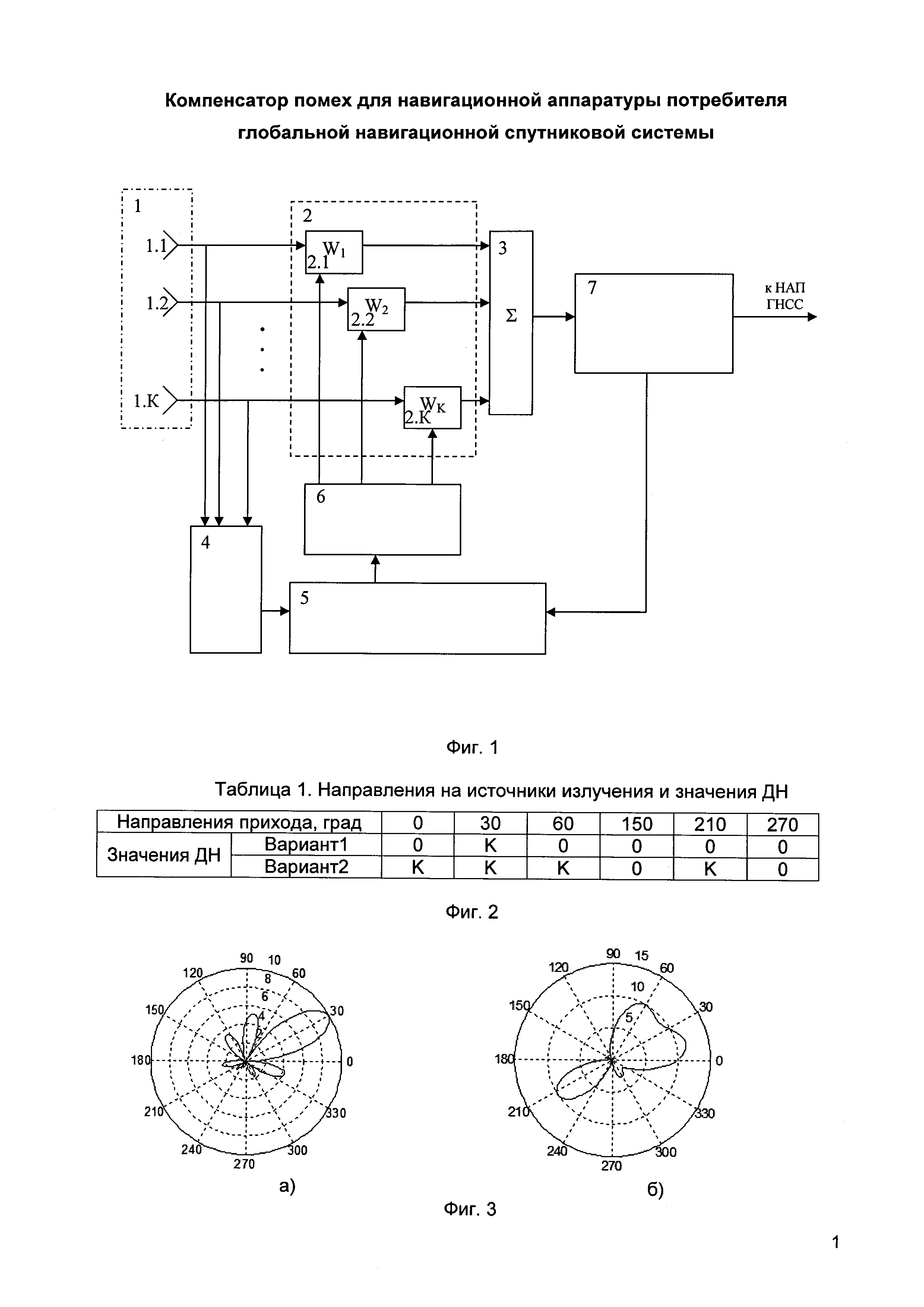
На фиг. 1 показана принципиальная схема компенсатора помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы, на фиг. 2 показана Таблица 1 «Направления на источники излучения и значения ДН», в которой для примера приведены направления на источники излучения в виде двух вариантов значений диаграммы направленности, на фиг. 3 показаны диаграммы направленности 10-элементной кольцевой антенной решетки радиусом 70 см на частоте 300 мГц: а) при формировании значения ДН, равного K=10 в направлении на один источник излучения, и формировании нулей в направлениях на оставшиеся источники; б) при формировании значений ДН, равных K=10 в направлениях на 4 источника излучения навигационного сигнала при одновременном формировании нулей в направлениях оставшихся источников, которые могут быть источниками помех.
Компенсатор помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы состоит из антенной решетки 1 имеющей антенные элементы 1.1, 1.2, … 1.К, диаграммообразующей схемы 2 имеющей блоки весовых коэффициентов 2.1, 2.2, …, 2.К, сумматора 3, пеленгатора 4, блока задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5, блок расчета весовых коэффициентов 6, анализатора сигналов НКА и помех 7.
Все элементы компенсатора помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы имеют связи между собой.
Выходы антенных элементов 1.1, 1.2, … 1.К антенной решетки 1, соединены с соответствующими входами пеленгатора 4 и с входами блока весовых коэффициентов 2.1, 2.2, …, 2.К диаграммообразующей схемы 2. Выход пеленгатора 4 соединен с одним из входов блока задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5, выход которого, соединен с входом блока расчета весовых коэффициентов 6. Каждый выход блока расчета весовых коэффициентов 6 соединен с входом соответствующего блока весовых коэффициентов 2.1, 2.2, …, 2.К диаграммообразующей схемы 2. Выход каждого блока весовых коэффициентов 2.1, 2.2, …, 2.К диаграммообразующей схемы 2 соединен с соответствующим входом сумматора 3, выход которого, соединен с входом анализатора сигналов НКА и помех 7. Анализатор сигналов НКА и помех 7 имеет два выхода, один выход соединен с одним из входов блока задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5, другой выход соединен с НАП ГНСС (на фиг. не показано).
Компенсатор помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы работает следующим образом. Навигационные сигналы и помехи поступают на антенные элементы 1.1, 1.2, …, 1.К антенной решетки 1 и с выходов передаются в блоки весовых коэффициентов 2.1, 2.2, …, 2.К диаграммообразующей схемы 2 и в пеленгатор 4.
В пеленгаторе 4 происходит оценка ковариационной матрицы сигналов
R=E[X(t)X(t)H]/Т,
где Е[⋅] - оператор математического ожидания, Т - время усреднения, X(t)=[x1(t), x2(t), …, xK(t)]T - вектор сигналов в каналах антенной решетки, верхний индекс «Н» означает комплексное сопряжение и транспонирование, «Т» - транспонирование.
Далее с использованием ковариационной матрицы с помощью одного из распространенных ковариационных алгоритмов [3] рассчитывается пространственный спектр, по максимумам которого определяются направления прихода навигационных сигналов и помех от источников радиоизлучений. Измеренные направления поступают в блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5.
В связи с тем, что в начальный момент в анализаторе сигналов НКА и помех 7 отсутствует информация о направлениях прихода навигационных сигналов и помех, то передача в блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5 информации направлениях не происходит. После определения пеленгатором 4 направлений на источники излучения блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5 в направлении прихода сигнала от первого источника задает значение ДН, равное b(θ1)=К, а в остальных направлениях - нули b(θn)=0, где n=2, …, N, эти значения передаются в блок расчета весовых коэффициентов 6. В качестве примера, характер постановки задачи приведен в табл. 1, вариант 1, фиг. 2.
Блок расчета весовых коэффициентов 6 рассчитывает вектор весовых коэффициентов W=[w1, w2, …, wK]T, удовлетворяющий этим ограничениям из системы уравнений (1).

где ρk и ϕk - полярные координаты k-го антенного элемента 1.1, 1.2, …, 1.К, N - общее число заданных значений ДН, индекс «т» означает транспонирование.
Перепишем систему (1) в матричном виде

где 
А - матрица размерностью K×N, В - вектор столбец размерностью N×1.
Здесь  , k=1, 2, …, К, n=1, 2, …, N.
, k=1, 2, …, К, n=1, 2, …, N.
Система (3) содержит N уравнений с K неизвестными. Как правило, N≠K. При N≠K система не может быть решена с применением обратной матрицы, поскольку обратная матрица существует только лишь для квадратных матриц. Решение такой задачи может быть найдено с помощью метода наименьших квадратов [4]. В этом методе решение отыскивается с применением аппарата псевдообратных матриц в следующем виде

Если матрица А не вырождена, т.е. имеет полный ранг (в данном случае ранг, равный K), то псевдообратная матрица определяется по формуле

и система (3) имеет единственное решение, определяемое с помощью (4).
При N≤K вектор (4) является точным решением системы (3). При выполнении условия N>K вектор (4) представляет приближенное решение, минимизирующее среднеквадратическое отклонение заданных значений диаграммы направленности В(θ) от значений синтезируемой ДН.
Полученные значения вектора весовых коэффициентов W=[w1, w2, …, wK]T передаются в соответствующий блок весовых коэффициента 2.1, 2.2, …, 2.К диаграммообразующей схемы 2.
Блоки весовых коэффициентов 2.1, 2.2, …, 2.К диаграммообразующей схемы 2, получив векторы весовых коэффициентов W=[w1, w2, …, wK]T от блока расчета весовых коэффициентов 6 и сигналы с приемных элементов 1.1, 1.2, …, 1.К антенной решетки 1, управляя фазой и амплитудой сигналов, формируют взвешенные сигналы. Сформированные сигналы поступают на сумматор 3, где происходит их сложение и подача результирующего сигнала в анализатор сигналов НКА и помех 7. В качестве примера для этой ситуации на фиг. 3а) приведен график ДН антенной системы.
Анализатор сигналов НКА и помех 7 производит первичный и вторичный анализ полученного сигнала, определяя, является данный сигнал навигационным или помехой.
Первичный анализ включает:
- анализ срыва приема сигналов от НКА отечественной группировки;
- анализ направлений на источники навигационных сигналов;
- анализ амплитуды (уровня) навигационных сигналов.
Если отсутствует срыв приема сигналов, направление на источник сигнала совпадает с направлением на один из НКА или уровень сигнала не превышает заданный уровень, то анализатор сигналов НКА и помех 7 переходит к вторичному анализу. В противном случае он помечает анализируемое направление как направление на источник помехи.
Вторичный анализ обеспечивает анализ содержания навигационного сообщения. По своему содержанию навигационное сообщение подразделяется на оперативную и неоперативную информацию [5].
Оперативная информация относится к тому НКА, с борта которого передается данный навигационный радиосигнал и содержит:
- оцифровку меток времени НКА;
- сдвиг шкалы времени НКА относительно шкалы времени системы ГЛОНАСС;
- относительное отличие несущей частоты излучаемого навигационного радиосигнала от номинального значения;
- эфемериды НКА и другие параметры.
Неоперативная информация или, иначе альманах системы, включает в себя:
- данные о состоянии всех НКА системы (альманах состояния);
- данные о шкале времени системы;
- данные о шкале времени каждого НКА;
- параметры орбит всех НКА системы (альманах орбит).
Если поступивший сигнал является навигационным, он передается в НАП ГНСС, а в блок задания значений диаграммы направленности (5) поступает команда, что в этом направлении значение диаграммы направленности должно быть равным К, если определяется, что полученный сигнал является помехой, то в блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5 поступает команда, что в этих направлениях значения ДН должны быть заданы равными нулю.
Так пройдя по кругу, принимаемые сигналы с разных направлений обрабатываются и проходят через анализатор сигналов НКА и помех 7, где выявляются направления, с которых приходят навигационные сигналы и с которых приходят помеховые сигналы. Полученная информация о направлениях прихода сигналов и помех передается в блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5, в котором в направлениях прихода навигационных сигналов значение ДН задается, равное К, а в направлениях прихода помех - нули, и эти значения передаются в блок расчета весовых коэффициентов 6. В качестве примера в Таблице 1, вариант 2, (фиг. 2) показаны значения ДН в направлениях на навигационные сигналы и помехи, а на фиг. 3 б) приведен график соответствующей диаграммы направленности.
Таким образом, путем последовательного формирования главного лепестка ДН адаптивной антенной решетки в каждом из имеющихся направлений на источники сигналов и помех с дальнейшим анализом характеристик сигналов на принадлежность отечественной группировке НКА осуществляется поиск навигационных сигналов на фоне помех. После определения направлений на все источники навигационных сигналов и на источники помех блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех 5 выдает направления и соответствующие им значения ДН в блок расчета весовых коэффициентов 6. В результате формируется ДН адаптивной антенной решетки, значения которой в направлениях на источники навигационного сигнала равны 1, а в направлениях на источники помех - нули.
Источники информации
1. Патент №2574860 РФ, МПК Н04В 1/10. Обнаружитель с компенсатором помех / А.В. Журавлев [и др.] (РФ). Открытое акционерное общество научно-производственное предприятие «ПРОТЕК» (РФ). - №2014152662/07; заявлено 24.12.2014; опублик. 10.02.2016, БИ 4. - 6 с., 1 ил.
2. Патент №2579996 РФ, МПК H01Q 21/00. Многофункциональная адаптивная антенная решетка / Д.С. Махо, А.Н. Новиков (РФ); Военная академия Ракетных войск стратегического назначения имени Петра Великого МОРФ (РФ). - №2014101145/08; заявлено 16.01.2014; опублик. 10.04.2016, БИ 10. - 6 с., 1 ил.
3. Журавлев А.В., Безмага В.М., Маркин В.Г. Ковариационные методы определения направлений прихода сигналов. Научно-технический журнал «Теория и техника радиосвязи», Выпуск 4, 2016 г., с. 33-39.
4. Беклемишев Д.В. Дополнительные главы линейной алгебры. - М.: Наука. Главная редакция физико-математической литературы, 1983. - 336 с.
5. Интерфейсный контрольный документ. Навигационный радиосигнал диапазонах L1, L2. (редакция 5.1). М., 2008 г., 74 с.
Компенсатор помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы, состоящий из K-элементной антенной решетки, диаграммообразующей схемы, имеющей блоки весовых коэффициентов, сумматора, отличающийся тем, что в него добавлены пеленгатор, блок задания значений диаграммы направленности в направлениях сигналов навигационной космической аппаратуры (НКА) и помех, блок расчета весовых коэффициентов, анализатор сигналов НКА и помех, выходы антенных элементов антенной решетки соединены с соответствующими входами пеленгатора и входами блоков весовых коэффициентов диаграммообразующей схемы, выход пеленгатора соединен с одним из входов блока задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех, выход которого соединен с входом блока расчета весовых коэффициентов, имеющего выходы, соединенные с соответствующими входами блоков весовых коэффициентов диаграммообразующей схемы, выходы блоков весовых коэффициентов диаграммообразующей схемы соединены с соответствующими входами сумматора, выход которого соединен с входом анализатора сигналов НКА и помех, имеющего два выхода, один из которых соединен с другим входом блока задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех, второй соединен с навигационной аппаратурой потребителя (НАП) глобальной навигационной спутниковой системы (ГНСС), при этом приемные элементы антенной решетки принимают навигационные сигналы и помехи и передают их в блоки весовых коэффициентов диаграммообразующей схемы и в пеленгатор, определяющий направления прихода навигационных сигналов и помех и передающий их в блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех, который задает значения диаграммы направленности (ДН) в направлениях прихода сигналов, равными К, а в остальных направлениях - нули, передает эти значения в блок расчета весовых коэффициентов, который рассчитывает вектор весовых коэффициентов и передает значения вектора в соответствующие блоки весовых коэффициентов диаграммообразующей схемы, которые формируют взвешенные сигналы и передают их в сумматор, где происходит их сложение и передача результирующего сигнала в анализатор сигналов НКА и помех, который проводит анализ, выявляющий принадлежность поступившего сигнала к навигационным сигналам или помехам, и передает информацию о принадлежности в блок задания значений ДН в направлениях на источники сигналов НКА и помех, после определения направлений на все источники навигационных сигналов и на источники помех блок задания значений диаграммы направленности в направлениях на источники сигналов НКА и помех выдает в блок расчета весовых коэффициентов значения ДН, равные К в направлениях прихода навигационных сигналов и нулю - в направлениях прихода помех; в результате формируется ДН адаптивной антенной решетки, значения которой в направлениях на источники навигационного сигнала равны К, а в направлениях на источники помех - нули; полученные навигационные сигналы анализатор сигналов НКА и помех пропускает в НАП ГНСС.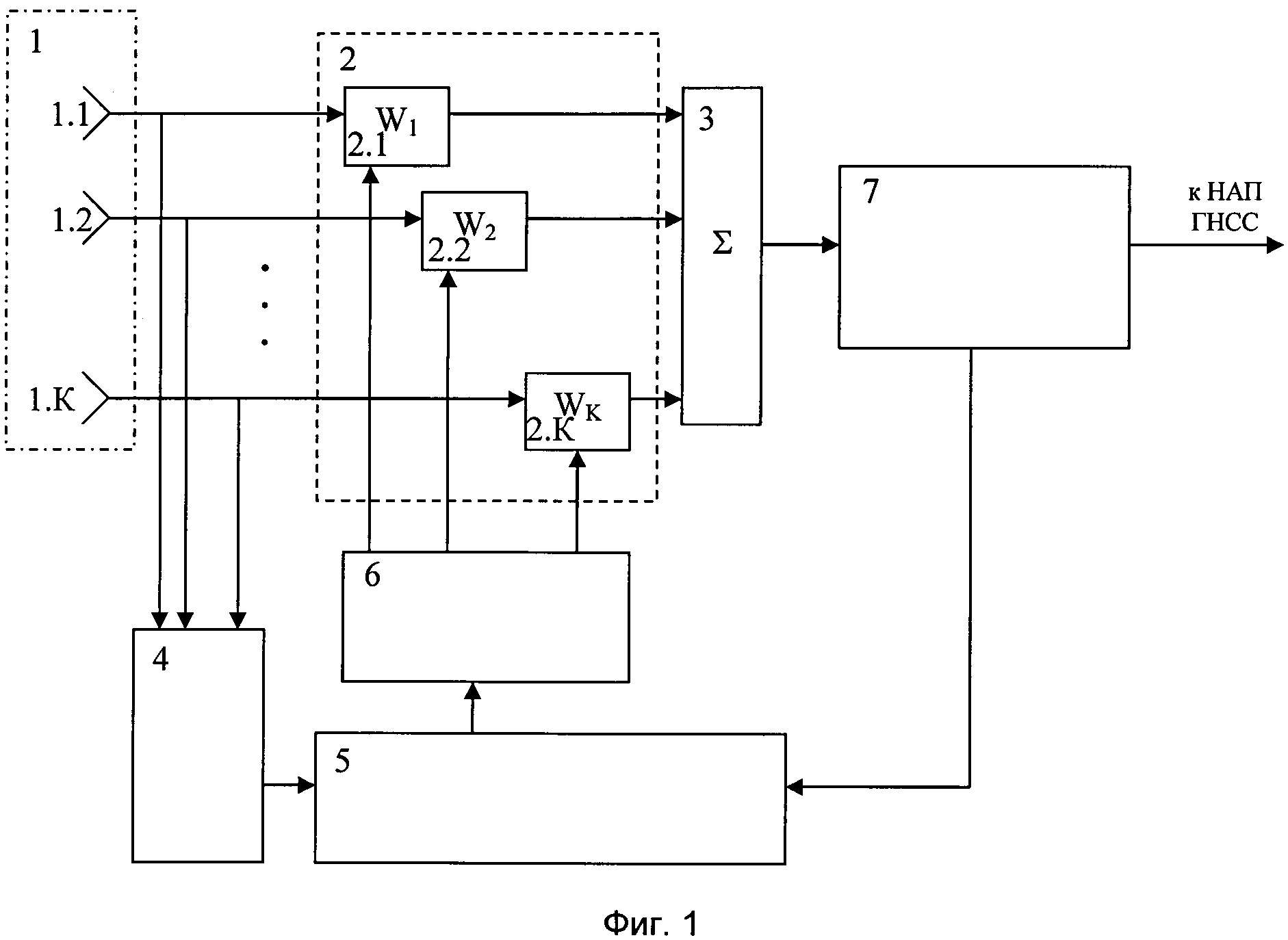
Симметричная вибраторная антенна с симметрирующим устройством
Радиопередающее устройство с автоматической регулировкой параметров спектра радиосигнала
Способ отождествления позиционных измерений и определения местоположения воздушных целей в пространственно-распределенной радионавигационной системе в условиях многоцелевой обстановки
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки
Способ определения координат воздушных целей в многопозиционной системе наблюдения "навигационные спутники - воздушные цели - приемник"
Станция радиоподавления приемной аппаратуры спутников-ретрансляторов низкоорбитальной системы спутниковой связи
Способ эксплуатации литий-ионной аккумуляторной батареи в автономной системе электропитания
Способ отождествления сигналов, рассеянных воздушными целями, многопозиционной пространственно распределенной радионавигационной системой с использованием измерений направлений на воздушные цели
Корреляционно-фазовый пеленгатор
Способ отождествления позиционных измерений и определения местоположения воздушных объектов в многопозиционной радионавигационной системе с использованием многолучевых радиопередатчиков
Способ формирования диаграммы направленности активной фазированной антенной решетки

