Результат интеллектуальной деятельности: Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией
Вид РИД
Изобретение
Изобретение относится к области радиолокации и предназначено для применения в бортовых радиолокационных станциях (БРЛС) для определения угла сноса летательного аппарата-носителя БРЛС. Угол сноса - угол между продольной осью летательного аппарата (ЛА) и направлением его движения относительно земной поверхности.
Известен «Способ определения вектора земной скорости и угла сноса летательного аппарата» [RU 2231757 опубликовано 27.06.2004, МПК G01C 23/00]. Способ заключается в том, что на борту с помощью многолучевого измерителя доплеровских частот определяют доплеровские частоты по коммутируемым приемопередающим радиолокационным лучам, на основании этих измерений корректируют первые ступени интеграторов гироинерциальной навигационной системы и на ее выходе получают уточненные значения вектора земной скорости летательного аппарата. Направляющие косинусы матрицы перехода от гироинерциальной к связанной системе координат получают методом интегрирования кинематических дифференциальных уравнений Пуассона по данным от блока датчиков угловых скоростей летательного аппарата при начальных корректируемых значениях, которые вычисляют по данным о мгновенных значениях углов курса, тангажа и крена, получаемых от гироинерциальной навигационной системы. По данным высотомера и пространственной ориентации лучей к коммутации для измерений допускаются только те лучи, для которых выполняются энергетические условия устойчивого выделения отраженного от земли сигнала. По данным гироинерциальной навигационной системы о составляющих вектора земной скорости летательного аппарата и пространственной ориентации коммутируемого луча вычисляют для него прогнозируемое значение скорости сближения для настройки его доплеровского фильтра. После состоявшегося измерения получают невязку между измеренным и прогнозируемым значениями скорости сближения по этому лучу и на ее основе получают очередное уравнение для составляющих вектора приращений земной скорости в связанной системе координат. При наличии линейной связи этого уравнения с двумя предыдущими его исключают и коммутируют очередной луч, для которого тоже выполняются энергетические условия устойчивого выделения отраженного от земли сигнала. Проводят измерения, вычисляют прогнозируемое значение скорости сближения, настраивают доплеровский фильтр этого луча, получают невязку и на ее основе получают очередное уравнение для составляющих вектора приращений земной скорости до получения системы трех линейно независимых уравнений. Решают эту систему, включая уравнения, полученные до или между возможными сбоями, получают значения составляющих вектора приращений земной скорости в связанной системе координат, представляют полученный вектор по составляющим в гироинерциальной системе координат. Производят статистическую обработку получаемых измерений, например, по методу скользящего среднего на выборке, полученными статистическими оценками корректируют соответственно по канально показания гироинерциальной системы и получают уточненные значения вектора земной скорости летательного аппарата, к тому же лучи доплеровского измерителя при установке на летательном аппарате ориентируют за пределами сектора передней полусферы, чтобы не происходило радиодемаскирования летательного аппарата при подлете к ПВО зоны фронта и атакуемой наземной цели. Угол сноса определяют как угол между текущими значениями трехмерных векторов земной и воздушной скоростей летательного аппарата, для чего наряду с уточненным текущим значением вектора земной скорости дополнительно учитывают текущее значение трехмерного вектора его воздушной скорости.
Недостатком указанного способа является невозможность измерения угла сноса исключительно бортовой радиолокационной станцией из-за необходимости использования данных инерциальной навигационной системы и высотомера, установленных на самолете.
Известен способ измерения скорости и угла сноса посредством двухлучевой антенной системы [Радиотехнические системы / Под ред. Ю.М. Казаринова. М.: Высшая школа, 1990 г., стр. 361-365]. Способ заключается в излучении и приеме радиосигнала в процессе сканирования двухлучевой антенной системой земной поверхности по азимуту в переднем секторе обзора относительно строительной оси носителя доплеровского измерителя скорости и угла сноса (ДИСС). Затем измеряют значения доплеровских частот сигналов, принятых по каждому из лучей антенной системы. Далее добиваются поворотом антенной системы равенства доплеровских частот. И определяют угол сноса как азимутальное положение оси антенной системы.
Недостатком указанного способа является низкая точность определения угла сноса, вызванная слабой корреляцией принятых по двум лучам сигналов из-за разносюжетных подстилающих поверхностей, накрываемых разными лучами антенной системы ДИСС.
Техническим результатом предлагаемого изобретения является повышение точности за счет определения угла сноса по фазе сигналов, отраженных от одного и того же участка местности.
Технической проблемой, решаемой предлагаемым изобретением, является создание высокоточного способа определения угла сноса для реализации в бортовых радиолокационных станциях летательных аппаратов.
Сущность изобретения заключается в том, что формируют антенной БРЛС на прием два независимых луча, разнесенных по азимуту, когерентно принимают импульсные сигналы, отраженные от земной поверхности, в процессе сканирования двумя лучами земной поверхности по азимуту в переднем секторе обзора относительно строительной оси летательного аппарата-носителя БРЛС.
Новым в заявляемом способе является то, когерентное излучение сигнала осуществляют одним лучом на передачу, перекрывающим по ширине лучи на прием. Принятые сигналы стробируют по дальности, осуществляют аналого-цифровое преобразование сигналов, когерентно накапливают сигналы, принятые во всем секторе обзора. Затем определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу, отраженными от одного и того же участка земной поверхности. Далее определяют между скомпенсированными сигналами усредненную по стробам дальности и излученным импульсам сигналов разность фаз. Затем фиксируют сигналы, величина усредненной разности фаз которых меняет знак на противоположный, определяют направление на участок земной поверхности, от которого были приняты эти сигналы. Угол сноса определяют как угол между этим направлением и строительной осью летательного аппарата-носителя БРЛС в горизонтальной плоскости относительно земной поверхности.
На Фиг. 1 представлена функциональная схема радиолокационной станции, осуществляющей способ.
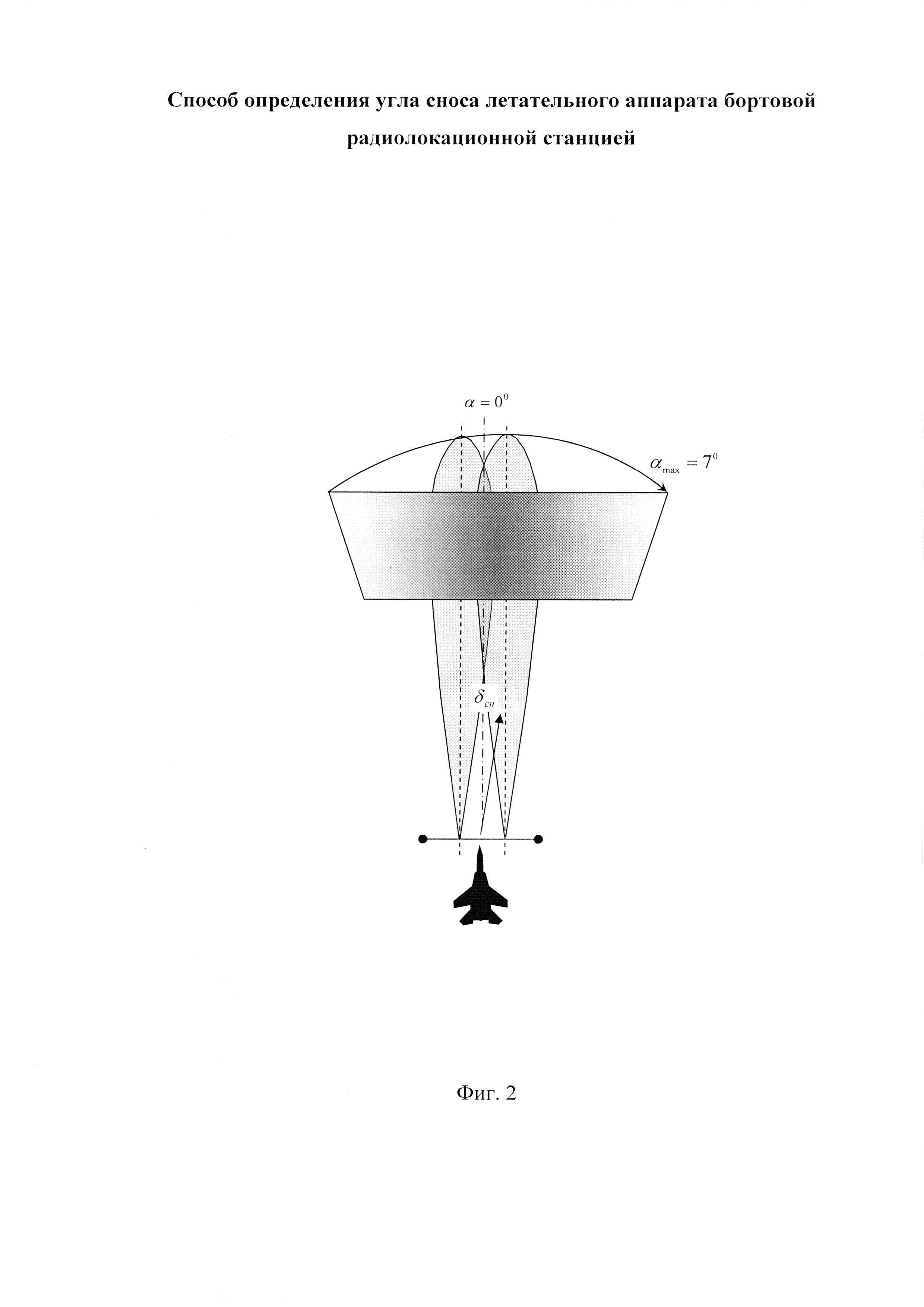
На Фиг. 2 схематично изображена геометрическая схема измерения угла сноса, где δсн - угол сноса носителя БРЛС, α - текущий азимут ДНА БРЛС.
На Фиг. 3 представлены экспериментальные графики зависимости разности фаз сигналов, принятых по каждому из двух лучей антенны БРЛС от азимута.
Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией может быть реализован, например, в импульсно-доплеровской БРЛС в режиме воздух – поверхность, состоящей из антенны (1), передатчика (2), приемника (3), процессора управления (4), процессора сигналов (5), вычислителя (6). Первый выход процессора управления (4) соединен с первым входом антенны (1), выход передатчика (2) соединен со вторым входом антенны (1). Первый выход антенны (1) соединен с первым входом приемника (3), второй выход антенны (1) соединен со вторым входом приемника (3). Первый выход приемника (3) подключен к первому входу процессора сигналов (5), второй выход приемника (3) подключен ко второму входу процессора сигналов (5). Выход процессора сигналов (5) подключен к первому входу вычислителя (6), второй выход процессора управления (4) соединен со вторым входом вычислителя (6). Выход вычислителя (6) является внешним выходом БРЛС.
Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией осуществляется следующим образом.
Режим определения угла сноса запускается летчиком соответствующей командой из процессора управления (4) или автоматически при необходимости определения угла сноса. Процессор управления (4) задает параметры управления антенне (1) для просмотра соответствующей зоны обзора. Антенна формирует широкую однолучевую диаграмму направленности (ДНА) на передачу, а на прием ДНА, состоящую из двух узких лучей, разнесенных по азимуту, например, на величину ширины ДНА, и выставляет ее на одну из границ зоны обзора - пусть это будет левая граница переднего сектора обзора ±7° по азимуту. При этом ширина однолучевой ДНА на передачу больше либо равна ширине двухлучевой ДНА на прием. После установки лучи ДНА начинают плавно перемещаться слева направо в азимутальной плоскости, проводя сканирование зоны обзора по азимуту (процесс показан на Фиг. 2). В процессе обзора антенна (1) излучает сформированный передатчиком (2) когерентный радиолокационный сигнал.
Отраженный от земной поверхности сигнал принимается антенной (1) независимо по каждому из двух лучей. С первого и второго выходов антенны (1) сигналы поступают на первый и второй входы двухканального приемника (3), где осуществляется обработка сигналов: сигналы, принятые по каждому лучу, стробируют по дальности, осуществляют аналого-цифровое преобразование сигналов. Затем когерентно накапливают их в процессоре сигналов (5). Процесс излучения/приема радиолокационного сигнала осуществляется в ходе сканирования лучом ДНА земной поверхности в заданном секторе обзора по закону, заданному процессором управления (4). По завершении сканирования (достижении лучом ДНА правой границы зоны обзора) завершается накопление сигналов в процессоре сигналов (5) и запускается вычисление разности фаз между сигналами.
Относительно одной точки на поверхности Земли между сигналами s1(t) и s2(t), принятыми по двум лучам, присутствует задержка  , где θ0 - угол, на который разнесены лучи по азимуту, a νск - скорость сканирования ДНА БРЛС. При вычислении разности фаз двух сигналов осуществляют компенсацию этой задержки, поскольку разность фаз необходимо определять относительно одного участка Земной поверхности.
, где θ0 - угол, на который разнесены лучи по азимуту, a νск - скорость сканирования ДНА БРЛС. При вычислении разности фаз двух сигналов осуществляют компенсацию этой задержки, поскольку разность фаз необходимо определять относительно одного участка Земной поверхности.
В процессоре сигналов (5) осуществляют вычисление усредненной разности фаз отсчетов сигналов по дальности и по азимуту как аргумент свертки двух сигналов, например, по следующему соотношению:

где m=-M/2…M/2 - стробы по дальности, n=-N/2…N/2 область осреднения по азимуту, М и N - целые числа,  - отсчеты сигнала, принятого по первому лучу, Δt - задержка между сигналами, принятыми по двум лучам,
- отсчеты сигнала, принятого по первому лучу, Δt - задержка между сигналами, принятыми по двум лучам,  - комплексно-сопряженные отсчеты сигнала, принятого по второму лучу со скомпенсированной задержкой. Область усреднения по стробам дальности М может составлять несколько десятков стробов дальности вокруг центра пятна накрываемого лучом. Такая величина области не влияет на изменение частоты Доплера по дальности, но при этом позволяет исключить случайные выбросы сигнала в одном стробе. Область усреднения по азимуту N определяется количеством излученных импульсов в направлении одного и того же участка Земной поверхности, что в свою очередь определяется шириной зоны обзора по азимуту, шириной луча, общим числом излученных импульсов. Величина области N может составлять несколько десятков импульсов при ширине приемного луча 1-2 градуса и зоне обзора ±7 градусов. Это усреднение позволяет получить математическое ожидание сигнала при разном рельефе местности, накрываемом приемным лучом ДНА.
- комплексно-сопряженные отсчеты сигнала, принятого по второму лучу со скомпенсированной задержкой. Область усреднения по стробам дальности М может составлять несколько десятков стробов дальности вокруг центра пятна накрываемого лучом. Такая величина области не влияет на изменение частоты Доплера по дальности, но при этом позволяет исключить случайные выбросы сигнала в одном стробе. Область усреднения по азимуту N определяется количеством излученных импульсов в направлении одного и того же участка Земной поверхности, что в свою очередь определяется шириной зоны обзора по азимуту, шириной луча, общим числом излученных импульсов. Величина области N может составлять несколько десятков импульсов при ширине приемного луча 1-2 градуса и зоне обзора ±7 градусов. Это усреднение позволяет получить математическое ожидание сигнала при разном рельефе местности, накрываемом приемным лучом ДНА.
Расчет усредненной разности фаз сигналов производится для всего накопленного сигнала в переднем секторе. При этом формируется массив отсчетов значений разности фаз. Количество отсчетов определяется количеством излученных импульсных сигналов за время сканирования, то есть для каждого излученного импульса рассчитывается усредненная фаза Δϕ. Определяемая разность фаз между сигналами возникает за счет движения носителя БРЛС, изменения ракурса наблюдения за участком земной поверхности. Разность фаз сигналов, принятых в азимутальном положении луча антенны до направления вектора скорости, имеет один знак, а после перехода луча антенны через направление вектора скорости разность фаз принятых сигналов меняет знак на противоположный. То есть в направлении зондирования земной поверхности, совпадающем с вектором скорости носителя БРЛС, фаза у принимаемых сигналов одинакова и разность фаз равняется нулю.
Значения разности фаз сигналов с выхода процессора сигналов (5) поступают на первый вход вычислителя (6), а со второго выхода процессора управления (4) поступают значения азимутального положения ДНА БРЛС. В вычислителе (6) определяют момент времени, в который разность фаз отраженных сигналов меняет знак на противоположный. Затем по временной диаграмме сканирования ДНА зоны обзора фиксируют угловое направление на участок земной поверхности, от которого были приняты эти сигналы, а угол сноса определяют как угол между этим направлением и строительной осью летательного аппарата-носителя БРЛС в горизонтальной плоскости относительно земной поверхности.
Далее значение угла сноса может быть выдано в пилотажную систему или иному потребителю информации.
На Фиг. 3 представлены графики экспериментальных зависимостей разности фаз от азимута двухлучевой ДНА БРЛС. Наличие линейного участка зависимости позволяет определить величину угла сноса с высокой точностью.
Таким образом, осуществляется определение угла сноса с повышенной точностью за счет того, что угол определяется по фазе сигналов, отраженных от одного и того же участка местности без влияния разносюжетных подстилающих поверхностей на принятые сигналы.
Способ повышения разрешающей способности по дальности радиолокационной станции
Т-циркулятор
Y-циркулятор
Радиолокационная станция
Бортовая радиолокационная станция
Способ определения диаграммы направленности фазированной антенной решетки
Т-циркулятор
Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом
Способ формирования круговой зоны электронного сканирования цилиндрической фазированной антенной решетки
Способ передачи данных
Способ картографирования земной поверхности бортовой радиолокационной станцией (брлс)
Способ повышения разрешающей способности по дальности радиолокационной станции
Радиолокационная станция
Бортовая радиолокационная станция
Способ обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой
Способ определения эффективной площади рассеяния воздушных объектов бортовой радиолокационной станцией
Способ картографирования земной поверхности бортовой радиолокационной станцией
Способ формирования диаграммы направленности цифровой антенной решеткой
Способ картографирования земной поверхности бортовой радиолокационной станцией в переднем секторе обзора
Способ измерения рельефа поверхности земли

