Результат интеллектуальной деятельности: Автоматизированное рабочее место для обучения расчета топопривязчика
Вид РИД
Изобретение
Изобретение относится к военной технике, а именно к тренажерам для обучения расчетов использованию комплексов топопривязки и навигации в условиях боевого применения.
Известен тренажер для подготовки расчетов комплекса управляемого вооружения (см. патент RU №2328692 С1, F41G 7/00, 10.07.2008 г.), принятый за прототип. Изобретение относится к средствам подготовки операторов комплексов управляемого вооружения и может быть применено в составе учебно-тренировочных средств, в частности, для подготовки расчетов боевых машин зенитных ракетно-пушечных комплексов. Тренажер содержит устройство для имитации визуальной обстановки, рабочие места оператора, командира и инструктора, устройство переговорной связи и аппаратно-программный комплекс для управления процессом обучения. Он выполнен в виде нескольких рабочих модулей, каждый из которых содержит рабочие места оператора и командира, а рабочее место инструктора выполнено в виде отдельного модуля. Пульт командира выполнен в виде видеомонитора, имитаторов органов управления и наведения, контроллера и аппаратно-программного комплекса, выполненного в виде трех персональных электронно-вычислительных машин.
Недостатками тренажера, принятого за прототип, являются:
- высокая сложность оборудования;
- большие габариты учебно-тренировочных средств и необходимость их постоянного технического обслуживания;
- отсутствие возможности реализации переносного автоматизированного рабочего места для обучения;
- отсутствие компактности исполнения, обеспечивающей удобное хранение и транспортирование, в т.ч. вместе с изделием;
- большой объем эксплуатационной документации, которую необходимо изучить перед использованием изделия;
- отсутствие имитации работы топопривязчика в полном объеме, что не позволяет исключить риски, возникающие при эксплуатации неопытным экипажем;
- разобщенность в одном занятии теоретической и практической части;
- недостаточная степень гибкости системы обучения при изменении алгоритма функционирования изделия после модернизации.
Предлагаемым изобретением решается задача по повышению качества подготовки расчетов подвижных комплексов топогеодезической привязки и навигации.
Технический результат, получаемый при осуществлении изобретения, заключается в создании автоматизированного рабочего места для обучения расчета топопривязчика, обеспечивающего подготовку расчета к выполнению основных штатных обязанностей, возникающих при эксплуатации топопривязчика, представление назначения и основных функций топопривязчика, его составных частей, имитацию работы с вычислительными средствами, модульное построение обучающей программы АРМ, содержащей теоретические знания, практическую часть для их закрепления и тест для проверки усвоения знаний по проведенным занятиям, возможность наращивания для доработки при изменении состава или модернизации топопривязчика.
Указанный технический результат достигается тем, что в предлагаемом автоматизированном рабочем месте для обучения расчета топопривязчика, содержащем имитационные устройства, функциональные рабочие места оператора, командира и инструктора, программно-аппаратный комплекс для управления процессом обучения, построенный по модульному принципу, и средства вычислительной техники, новым является то, что автоматизированное рабочее место, включающее в свой состав компьютер-моноблок, используемый для имитации программных интерфейсов, реализованных в топопривязчике, манипулятор-трекбол, USB-накопитель, специальное программное обеспечение и комплект монтажных частей, выполнено с возможностью обеспечения выполнения следующих основных задач: подготовка расчета к выполнению штатных обязанностей, ознакомление с назначением, основными функциями, составными частями топопривязчика, имитация работы с вычислительными средствами топопривязчика, программное обеспечение автоматизированного рабочего места состоит из модулей (занятий), содержащих теоретические знания, практические навыки для их закрепления, тесты для проверки усвоения знаний и справочные материалы, и выполнено с возможностью наращивания для доработки при изменении состава или модернизации топопривязчика, обучающая программа состоит из следующих модулей (занятий): модуль, содержащий описание состава, назначения и технических характеристик топопривязчика, модуль по изучению компоновки и назначения оборудования, размещенного на наружных поверхностях кузова-фургона и шасси, модуль по изучению компоновки и назначения оборудования, размещенного внутри кузова-фургона, модуль по изучению состава, назначения, размещения и функционирования составных частей топопривязчика: навигационной аппаратуры, программно-аппаратного комплекса, спецаппаратуры, выносной аппаратуры, системы связи и передачи данных, системы электроснабжения, системы жизнеобеспечения, оборудования для бытового обеспечения, дополнительного оборудования и принадлежностей, модуль, обучающий навыкам по подготовке топопривязчика к работе, модуль по порядку проведения технического обслуживания, модуль по составу, размещению, компоновке и назначению содержит указание места размещения составной части, выделение области расположения составной части, отображение названия изделия и его описание, модуль по изучению навигационной аппаратуры содержит сведения о работе автономной инерциальной навигационной системы, спутниковой навигационной системы, датчиков скорости, системы определения высоты, модуль по изучению программно-аппаратного комплекса выполнен с возможностью полной имитации возможностей программного обеспечения программно-аппаратного комплекса, раскрытия содержания интерфейсных окон, пошагового обучения работе с программно-аппаратным комплексом при выполнении задач по назначению и содержит описание всех голосовых оповещений и причины их появления, модуль по работе с системой связи и передачи данных содержит описание состава, назначения и порядок работы с системой связи и передачи данных, в т.ч. при формировании и передаче дифференциальных поправок, модуль по подготовке топопривязчика к работе содержит указания водителю по размещению топопривязчика над контрольной точкой, порядок включения/выключения аппаратуры и приведения топопривязчика в рабочее состояние, описание способов проведения начальной выставки дирекционного угла продольной оси топопривязчика и введения начальных координат и высоты.
Включение в состав автоматизированного рабочего места компьютера-моноблока, манипулятора-трекбола, USB-накопителя, специального программного обеспечения позволяет:
- обеспечить формирование защищенного специального программного обеспечения, устанавливающегося и поставляющегося в комплекте с компьютером-моноблоком;
- реализовать компактность исполнения автоматизированного рабочего места, обеспечивающую мобильность, удобство хранения и транспортирования;
- обеспечить управление посредством манипулятора следящим перекрестьем (курсором) на видеомониторе при работе с графической информацией;
- обеспечить накопление, хранение и установку информационных массивов, в частности цифровых карт местности;
- реализовать модульный принцип программирования, позволяющий существенно упростить создание программы, тестирование и отладку отдельных ее компонентов.
Выполнение автоматизированного рабочего места с возможностью обеспечения выполнения следующих основных задач: подготовка расчета к выполнению штатных обязанностей, ознакомление с назначением, основным функциями, составными частями топопривязчика, имитация работы с вычислительными средствами топопривязчика позволяет:
- получить представление о взаимодействии технических средств, которыми оснащен топопривязчик;
- имитировать выполнение комплексом топопривязки и навигации выполнение задач по назначению: получение, обработка всей поступающей с периферийных устройств информации и выдача управляющих команд.
Выполнение программного обеспечения автоматизированного рабочего места по модульному принципу, содержащему теоретические знания, практические навыки для их закрепления и тест для проверки усвоения знаний, с возможностью наращивания для доработки при изменении состава или модернизации топопривязчика позволяет:
- обеспечить полный цикл обучения, контроля знаний и навыков расчета топопривязчика, позволяющий представить необходимый объем информации, объективно и качественно оценить уровень знаний;
- обеспечить полный охват оцениваемых операций боевой работы расчета;
- реализовать методику оценки боевой работы расчета, полученную с учетом требований основных директивных документов об организации боевой подготовки в подразделениях РВ и А;
- создать систему автоматизированной оценки боевой работы расчета топопривязчика, основанную на принципах интеллектуальных технологий;
- максимально учесть «человеческий фактор» и минимизировать связанные с его проявлением ошибки при формировании оценок выполнения операций боевой работы расчетом.
Включение в состав обучающей программы модуля, содержащего описание состава, назначения и технических характеристик топопривязчика, модуля по изучению компоновки и назначения оборудования, размещенного на наружных поверхностях кузова-фургона и шасси, модуля по изучению компоновки и назначения оборудования, размещенного внутри кузова-фургона, модулей по изучению состава, назначения, размещения и функционирования составных частей позволяет:
- получить необходимые сведения по аппаратному составу, назначению приборов и систем;
- оценить возможности всего комплекса оборудования;
- получить практические навыки, необходимые в режиме боевой работы;
- усвоить обязанности каждого члена расчета и определить перечень аппаратуры, находящейся в зоне его ответственности.
Включение в состав обучающей программы модуля, обучающего навыкам по подготовке топопривязчика к работе, позволяет:
- расчету усвоить и закрепить навыки приведения топопривязчика в боевую готовность;
- довести применение этих навыков до автоматизма.
Включение в состав обучающей программы модуля по порядку технического обслуживания позволяет получить знания о видах, объемах, сроках и обязанностях при проведении технического обслуживания.
Включение в состав обучающей программы модуля по изучению навигационной аппаратуры позволяет:
- получить сведения о работе автономной инерциальной навигационной системы, спутниковой навигационной системы, датчиков скорости, системы определения высоты;
- получить представление о комплексировании навигационной информации, полученной от датчиков, работающих на разных физических принципах.
Включение в состав обучающей программы модуля по изучению программно-аппаратного комплекса позволяет:
- реализовать наглядную имитацию возможностей программного обеспечения программно-аппаратного комплекса;
- при пошаговом обучении работе с программно-аппаратным комплексом изучить содержание интерфейсных окон во время выполнения задач по назначению всех голосовых оповещений и причины их появления.
Включение в состав обучающей программы модуля по работе с системой связи и передачи данных позволяет:
- изучить состав, назначение и порядок работы системы связи и передачи данных;
- освоить методику функционирования топопривязчика в режиме контрольно-корректирующей станции.
Включение в состав обучающей программы модуля по подготовке топопривязчика к работе позволяет:
- изучить порядок включения и выключения аппаратуры;
- изучить порядок размещения автошасси топопривязчика над контрольной точкой;
- освоить способы введения начальных координат и высоты;
- освоить способы получения дирекционного угла;
- проверить техническое состояние аппаратуры.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
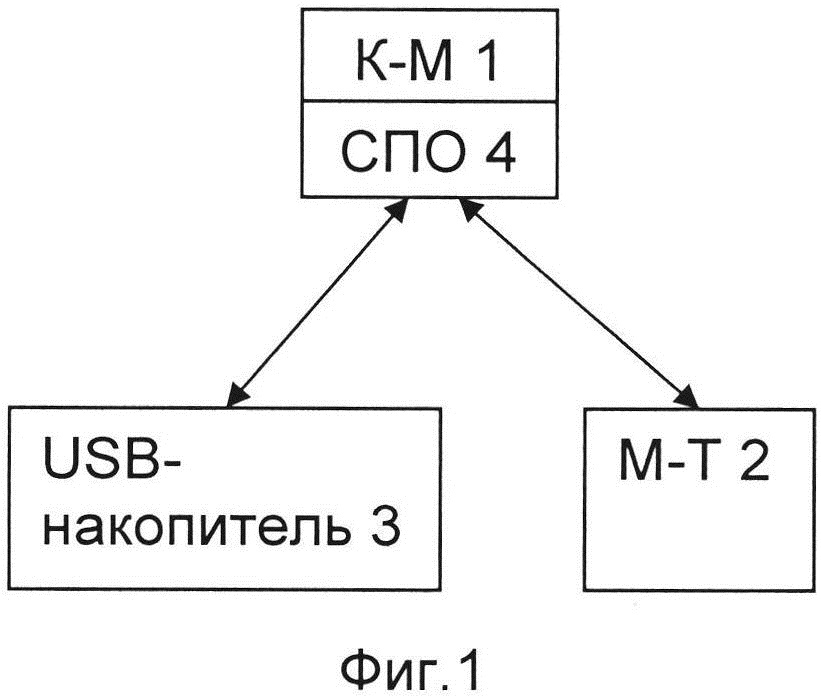
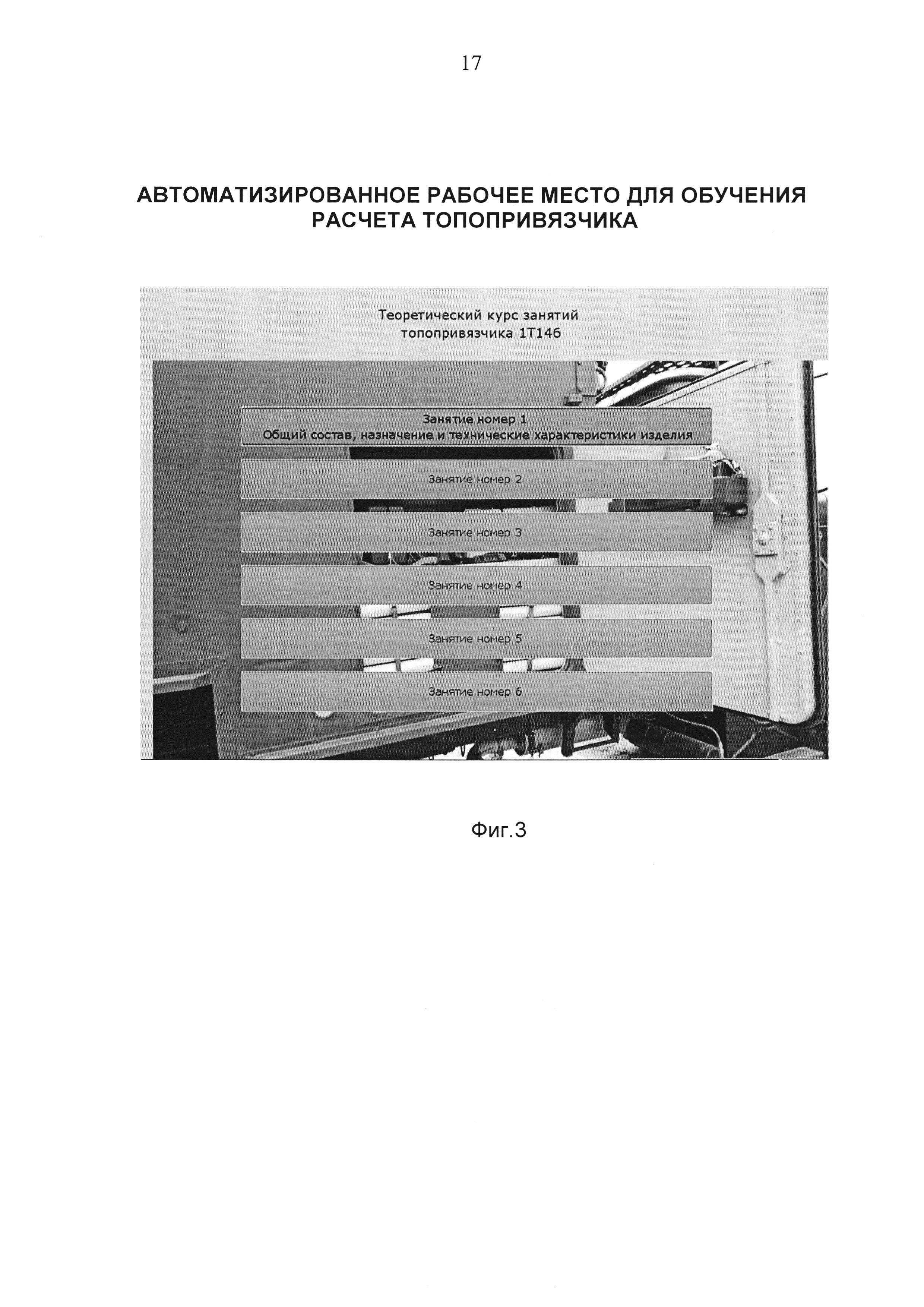
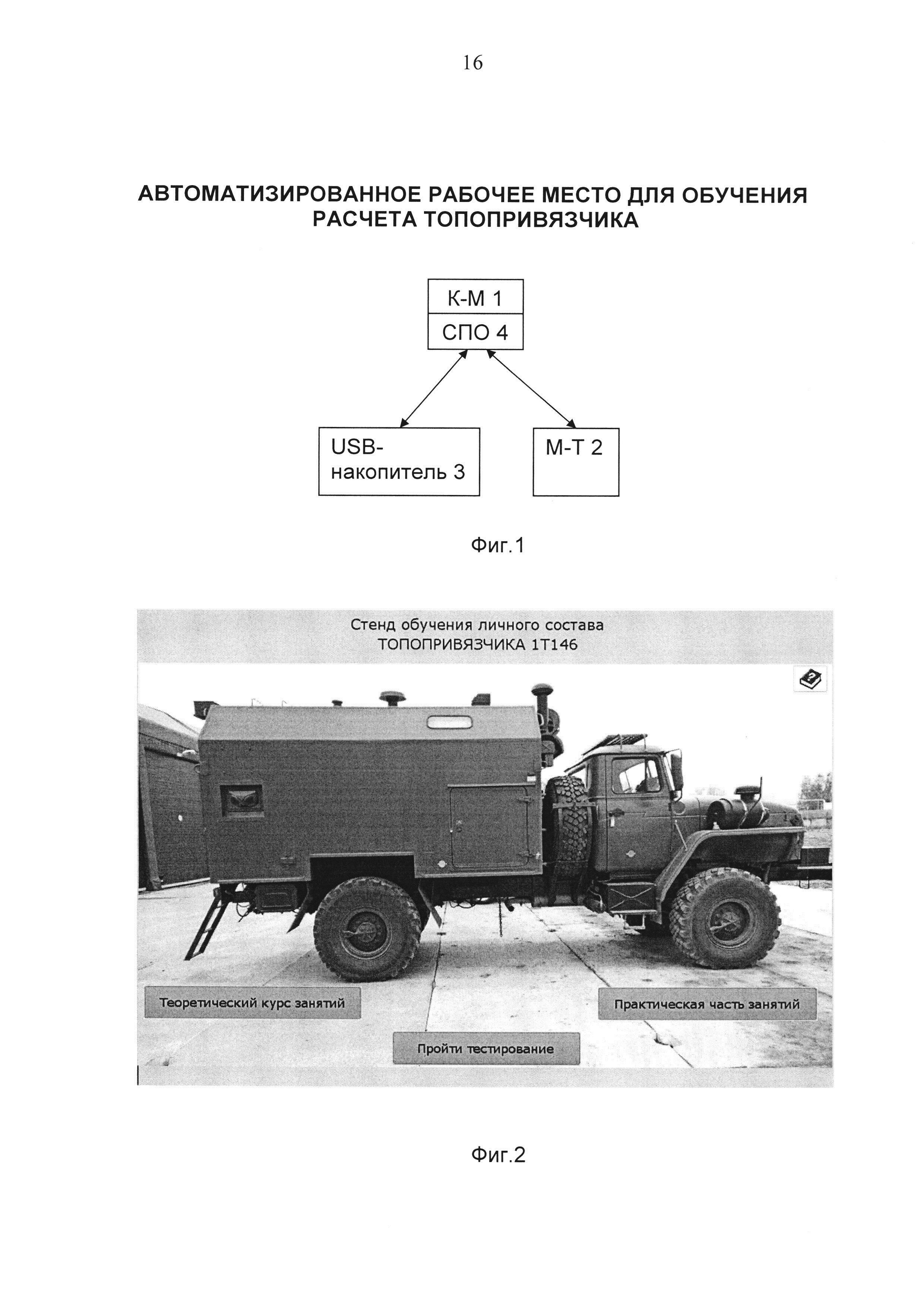
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема автоматизированного рабочего места, на фиг. 2 - главное окно обучающей программы; на фиг. 3 - список занятий меню «Теоретический курс занятий»; на фиг. 4 - пример слайда из занятия №1; на фиг. 5 - пример вопроса из теста по занятию №1; на фиг. 6 - результат тестирования, фиг. 7 - кнопка «Справка».
Автоматизированное рабочее место (АРМ) для обучения расчета топопривязчика содержит компьютер-моноблок (К-М) 1, манипулятор трекбол (М-Т) 2, USB-накопитель 3, специальное программное обеспечение (СПО 4).
АРМ для обучения расчета топопривязчика функционирует следующим образом. Топопривязчик в своем составе имеет большой перечень аппаратуры, используемой для топопривязки и навигации. Широкий спектр выполняемых задач обеспечивается множеством вычислительных средств, выполненных в виде отдельных блоков. Подготовка расчета по эксплуатационной документации, поставляемой с топопривязчиком, требует много времени. АРМ решает задачу оптимизации способа обучения знаниям и навыкам, необходимым при эксплуатации топопривязчика.
АРМ обеспечивает выполнение следующих основных задач: подготовка расчета к выполнению основных штатных обязанностей, регламентированных нормативной документацией, ознакомление с назначением топопривязчика и его составных частей, имитация работы расчета с вычислительными средствами. Обучающая программа АРМ состоит из модулей (занятий), содержащих теоретические знания по топопривязчику, практическую часть для их закрепления, и тестов для проверки усвоения знаний по проведенным занятиям. При изменении состава или модернизации топопривязчика программное обеспечение имеет возможность наращивания для доработки.
Обучающая программа АРМ состоит из следующих модулей (занятий): модуль, содержащий описание состава, назначения и технических характеристик топопривязчика, модуль по изучению компоновки и назначения оборудования, размещенного на наружных поверхностях кузова-фургона и шасси, модуль по изучению компоновки и назначения оборудования, размещенного внутри кузова-фургона, модуль по изучению состава, назначения, размещения и функционирования составных частей: навигационной аппаратуры, программно-аппаратного комплекса, спецаппаратуры, выносной аппаратуры, системы связи и передачи данных, системы электроснабжения, системы жизнеобеспечения, оборудования для бытового обеспечения, дополнительного оборудования и принадлежностей, модуль, обучающий навыкам по подготовке топопривязчика к работе, модуль по порядку проведения технического обслуживания. В модулях по составу, размещению, компоновке и назначению присутствует указание места размещения составной части, выделение области ее расположения, отображение названия и технического описания. Модуль по работе с навигационной аппаратурой дает сведения о работе автономной инерциальной навигационной системы, спутниковой навигационной системы, датчиков скорости: механического и доплеровского, системы определения высоты. Модуль по работе с программно-аппаратным комплексом обеспечивает полную имитацию специального программного обеспечения программно-аппаратного комплекса, раскрытие содержания интерфейсных окон, пошаговое обучение работе с программно-аппаратным комплексом при выполнении задач по назначению, описание всех голосовых оповещений и причины их появления. При этом при изучении программно-аппаратного комплекса рассматривается состав, действия при первом запуске, в режиме «Навигация» и в режиме «Состояние» и «Работа с картой», решение специальных задач в режиме «Сервисные задачи». Модуль по работе с системой связи и передачи данных содержит описание состава и назначения системы связи и передачи данных, порядок работы с системой связи и передачи данных при формировании дифференциальных поправок. Модуль по подготовке топопривязчика к работе содержит указания водителю по размещению топопривязчика над контрольной точкой, порядок включения/выключения аппаратуры и приведения топопривязчика в рабочее состояние, описание способов проведения начальной выставки дирекционного угла продольной оси топопривязчика: обычная выставка инерциальной навигационной системы, ручной ввод по известному углу или выставка по сохраненному углу и введения начальных координат и высоты: ручной ввод или введение данных автоматически с аппаратуры спутниковой навигации.
Подход к организации обучающего АРМ подразумевает разработку защищенного СПО 4, устанавливающегося и поставляющегося в комплекте с К-М 1. Переносимость стенда позволяет проводить обучение на изделии без выработки его ресурса. Такой подход обеспечит максимальную наглядность при ознакомлении с эксплуатационными свойствами топопривязчика. Компактность исполнения обеспечивает удобное хранение и транспортирование. В качестве К-М 1 используется моноблок HP ProOne 400 - компьютер, выполненный в едином корпусе вместе с монитором. В составе обучающего АРМ предназначается как платформа для запуска обучающего СПО 4 и частично имитирует панельный компьютер «Орион ПК-123-ФК28» из состава программно-аппаратного комплекса топопривязчика. М-Т 2 предназначен для управления следящим перекрестьем (курсором) на видеомониторе при работе с графической информацией. USB-накопитель 3 представляет собой одноплатную носимую микро-ЭВМ со встроенным накопителем, доступ к нему возможен по интерфейсам Ethernet или RS-232C. В качестве операционной системы, на которой будет запускаться обучающее программное обеспечение, выбрана Astra Linux Common Edition 111. Данная ОС сертифицирована в системе сертификации средств защиты информации по требованиям безопасности информации Министерства Обороны РФ. Для сборки проекта обучающего программного обеспечения был выбран встроенный в набор Astra Linux компиляторов GCC, отладка проекта проводилась с помощью отладчика gdb. Причины выбора компилятора GCC и отладчика gdb: полная совместимость со всеми версиями операционной системы Astra Linux, простота сборки написанных в текстовом редакторе проектов, модульный принцип программирования, позволяющий существенно упростить создание программы, тестирование и отладку отдельных ее компонентов.
Интерфейс обучающей программы создан с использованием тех же библиотек, которые применялись при разработке программно-аппаратного комплекса топопривязчика. Главное окно обучающей программы создано в виде рабочего поля с фоном и небольшим меню из четырех кнопок «Теоретический курс занятий», «Практический курс занятий», «Пройти тестирование» и «Справка». Краткая информация по эксплуатации программы и обозначениям, применяемым в ней, приведены в окне, вызываемом при нажатии на кнопку «Справка». В меню «Теоретический курс занятий» содержится список занятий, материал в которых объединен общей темой. Первое занятие называется «Общий состав, назначение и технические характеристики изделия», в нем дается вводный теоретический материал о топопривязчике, необходимый для изучения перед проведением занятий по обучению эксплуатации и выполнению задач на топопривязчике. Внутри теоретических занятий, для лучшего усвоения материала, теоретическая информация, схемы, таблицы и изображения разбиты на слайды. По завершении каждого занятия обучаемому предлагается пройти тестирование для проверки усвоенных знаний. Тест содержит 10 вопросов по материалу, представленному в занятии, при ответе на заключительный вопрос система тестирования выдает результат тестирования, общее количество вопросов и количество правильных ответов.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, обеспечивающего подготовку расчета к выполнению основных штатных обязанностей, возникающих при эксплуатации топопривязчика, представление назначения и основных функций топопривязчика, его составных частей, имитацию работы с вычислительными средствами, модульное построение обучающей программы АРМ, содержащей теоретические знания, практическую часть для их закрепления и тест для проверки усвоения знаний по проведенным занятиям, возможность наращивания для доработки при изменении состава или модернизации топопривязчика.
Автоматизированное рабочее место для обучения расчета топопривязчика, содержащее устройство для имитации, рабочие места оператора и инструктора, программно-аппаратный комплекс с видеомонитором для управления процессом обучения, отличающееся тем, что автоматизированное рабочее место, включающее в свой состав компьютер-моноблок, используемый для имитации программных интерфейсов, реализованных в топопривязчике, манипулятор-трекбол, USB-накопитель, специальное программное обеспечение и комплект монтажных частей, выполнено с возможностью обеспечения выполнения следующих основных задач: подготовка расчета к выполнению штатных обязанностей, ознакомление с назначением, основными функциями, составными частями топопривязчика, имитация работы с вычислительными средствами топопривязчика, программное обеспечение автоматизированного рабочего места состоит из модулей (занятий), содержащих теоретические знания, практические навыки для их закрепления, тесты для проверки усвоения знаний и справочные материалы, и выполнено с возможностью наращивания для доработки при изменении состава или модернизации топопривязчика, обучающая программа состоит из следующих модулей (занятий): модуль, содержащий описание состава, назначения и технических характеристик топопривязчика, модуль по изучению компоновки и назначения оборудования, размещенного на наружных поверхностях кузова-фургона и шасси, модуль по изучению компоновки и назначения оборудования, размещенного внутри кузова-фургона, модуль по изучению состава, назначения, размещения и функционирования составных частей топопривязчика: навигационной аппаратуры, программно-аппаратного комплекса, спецаппаратуры, выносной аппаратуры, системы связи и передачи данных, системы электроснабжения, системы жизнеобеспечения, оборудования для бытового обеспечения, дополнительного оборудования и принадлежностей, модуль, обучающий навыкам по подготовке топопривязчика к работе, модуль по порядку проведения технического обслуживания, модуль по составу, размещению, компоновке и назначению содержит указание места размещения составной части, выделение области расположения составной части, отображение названия изделия и его описание, модуль по изучению навигационной аппаратуры содержит сведения о работе автономной инерциальной навигационной системы, спутниковой навигационной системы, датчиков скорости, системы определения высоты, модуль по изучению программно-аппаратного комплекса выполнен с возможностью полной имитации возможностей программного обеспечения программно-аппаратного комплекса, раскрытия содержания интерфейсных окон, пошагового обучения работе с программно-аппаратным комплексом при выполнении задач по назначению и содержит описание всех голосовых оповещений и причины их появления, модуль по работе с системой связи и передачи данных содержит описание состава, назначения и порядок работы с системой связи и передачи данных, в т.ч. при формировании и передаче дифференциальных поправок, модуль по подготовке топопривязчика к работе содержит указания водителю по размещению топопривязчика над контрольной точкой, порядок включения/выключения аппаратуры и приведения топопривязчика в рабочее состояние, описание способов проведения начальной выставки дирекционного угла продольной оси топопривязчика и введения начальных координат и высоты.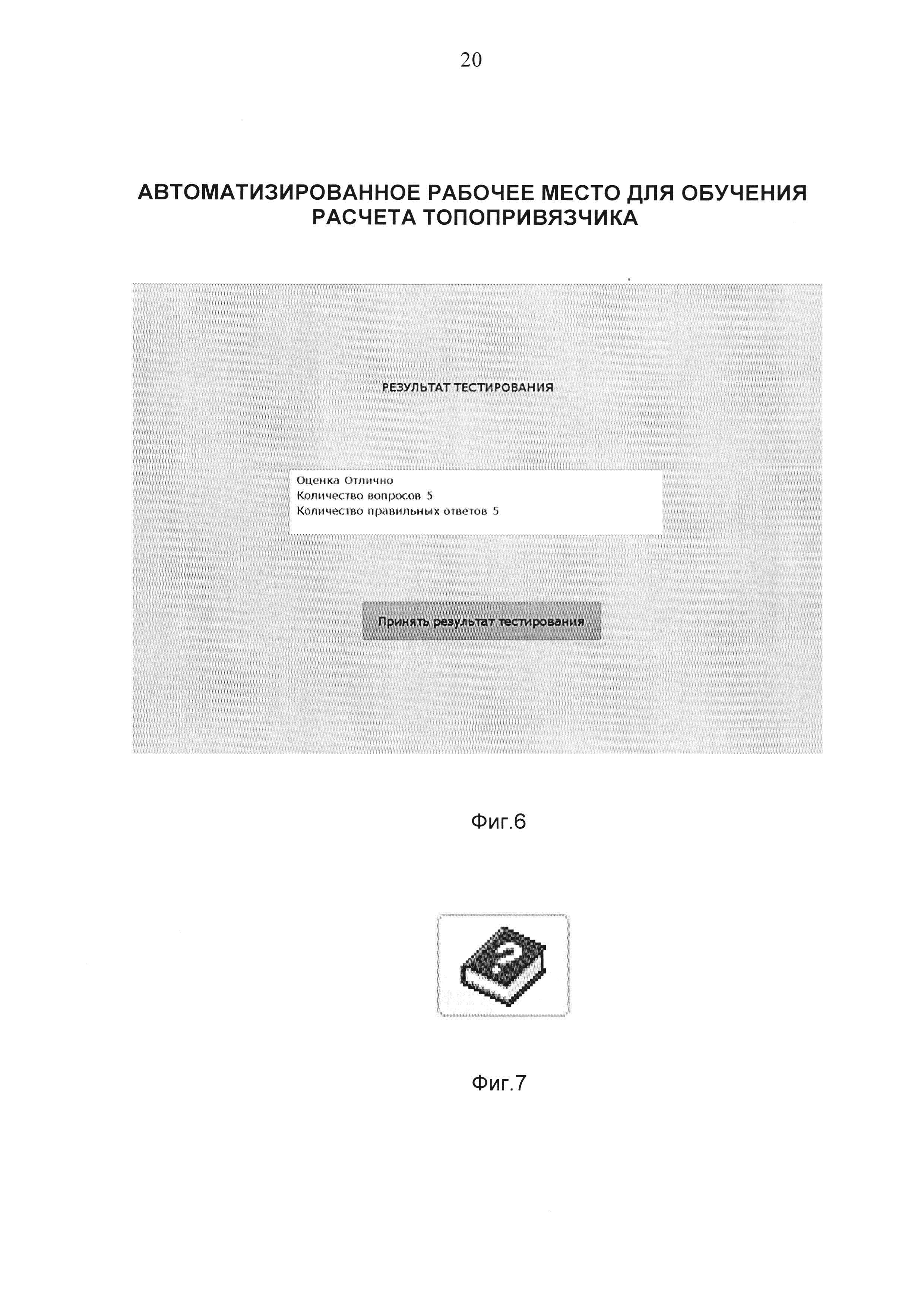
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ создания топогеодезических сетей для подготовки боевых действий ракетных войск, артиллерии и противовоздушной обороны сухопутных войск
Самодвижущаяся платформа робототехнического комплекса
Устройство для закрепления пустотелой детали
Способ информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса
Исполнительное устройство перемещения
Храповое устройство для стопорения вала
Система для определения и обеспечения показателей надёжности объекта военной техники
Имитатор воздушных целей
Система управления многофункционального робототехнического комплекса обеспечения боевых действий
Регулируемый спусковой механизм огнестрельного оружия
Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства
Способ приема и передачи топопривязчиком дифференциальных поправок
Способ контроля точностных характеристик системы топопривязки и навигации

