Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЗАИМНОЙ ОРИЕНТАЦИИ И ВЗАИМНОГО ПОЛОЖЕНИЯ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
Вид РИД
Изобретение
Область техники
Изобретение относится к области контрольной и измерительной аппаратуры и техники и может использоваться в тех системах, где важно знать взаимное положение и ориентацию нескольких приборов. Изобретение может быть применено на транспорте, космической и лабораторной технике, например, в качестве опорных платформ телескопов, оптических приборов, антенных устройств, измерительных систем и т.п.
Уровень техники
Из уровня техники RU 2312771 С1 (опубликовано В32В 33/00, G01B 9/06, B64G 1/22) известна платформа в виде плоской кольцевой или круговой центрально-симметричной панели, применяемой в высокоточной космической и наземной технике, например, в качестве опоры оптических приборов, антенных устройств, измерительных систем. Платформа содержит обшивки из слоев волокнистого материала, пропитанного полимерным связующим, сотовый заполнитель между обшивками и узлы крепления, расположенные с равным угловым шагом. Каждый слой обшивок состоит из состыкованных между собой секторов с одинаковым центральным углом. Количество секторов в каждом слое равно или кратно количеству узлов крепления. В каждом секторе одного слоя волокна ориентированы под одинаковым углом относительно центральной оси сектора. Секторы каждого последующего слоя смещены относительно секторов предыдущего слоя на угол, равный половине центрального угла сектора. В каждом секторе одного слоя волокна могут быть ориентированы под углом 90° к центральной оси сектора. Могут присутствовать также слои, где волокна ориентированы под углом 0° к этой оси. Платформа обеспечивает заданную точность позиционирования расположенных на ней узлов крепления при выполнении прочностных и жесткостных требований за счет управления термическим деформированием конструкции посредством применения новых структур армирования слоев композиционного материала, согласованных с расположением узлов крепления.
Из уровня техники US 6412346 В2 (опубликовано 02.07.2002, кл. G01C 21/16) известен инерциальный измерительный блок (IMU), устанавливаемый на подвижной машине, принятый в качестве ближайшего аналога. Измерительный блок включает корпус, на котором размещены три пары полупроводниковых датчиков, каждая пара содержит гироскоп и соответствующий измеритель ускорения. Корпус выполнен в форме треугольной пирамиды, а основание корпуса закреплено в номинальное положение и зафиксировано соответствующими креплениями для расположения и фиксации корпуса в заданном отношении к оси подвижного средства. Каждая пара полупроводниковых датчиков установлена на соответствующей лицевой стороне корпуса. Достоинством изобретения является корпус, который выполнен компактным по размерам, весу и объему и который легко можно установить на движущемся объекте (подвижном средстве).
Общим недостатком вышеуказанных устройств является отсутствие возможности регистрации собственных деформаций оснований, используемых в таких устройствах.
Для решения определенных технических задач необходимо контролировать взаимную ориентацию и взаимное положение измерительных приборов, а также изменение их ориентации и положения со временем.
Примером задачи, для решения которой может быть применено предлагаемое устройство, является построение высокоточной системы звездной ориентации с несколькими оптическими головками (датчиками). Каждая оптическая головка представляет собой фотокамеру с матричным фотоприемником, блоком электроники для обработки изображения и специальным математическим обеспечением. Каждая оптическая головка фотографирует фрагмент звездного неба, попадающий в ее поле зрения. Электронное изображение этого кадра считывается с матричного фотоприемника и передается в блок электроники для обработки. В кадре выделяются изображения звезд и определяются положения их центров в системе координат, связанной с оптической головкой. Часть полученного списка изображений отождествляется с звездами из бортового каталога, хранящегося в памяти блока электроники. Зная координаты отождествленных звезд в системе координат оптической головки, полученные в результате обработки изображения, и координаты этих же звезд в инерциальной системе координат (например, экваториальные небесные координаты звезд), хранящиеся в каталоге, можно определить ориентацию (разворот) системы координат, связанной с оптической головкой, относительно инерциальной системы координат, например две угловые экваториальные координаты центра поля зрения и разворот сторон кадра относительное направления на полюс мира. Показания всех оптических головок системы ориентации обрабатываются совместно и позволяют определить разворот системы ориентации относительно инерциальной системы координат. Для этого необходимо знать положение оптических головок внутри системы координат с точностью не хуже внутренней погрешности оптических головок. Также необходимо, чтобы положение оптических головок сохранялось во время эксплуатации системы ориентации с точностью не хуже внутренней погрешности оптических головок.
В настоящее время сохранение положения оптических головок в системе ориентации обеспечивается за счет механической стабильности конструкций. Проведенные лабораторные и летные испытания показали, что конструкции систем ориентации космических аппаратов испытывают термоупругие деформации, приводящие к изменению взаимной ориентации оптических головок на 5-20 угловых секунд при том, что внутренняя погрешность современных оптических головок датчиков звездной ориентации составляет 1-3 угловые секунды. Решение этой проблемы путем увеличения размеростабильности конструкции системы ориентации малоперспективно.
Таким образом, технической проблемой является создание устройства для контроля взаимной ориентации и взаимного положения измерительных приборов, обеспечивающего возможность исключения получения результатов совместных измерений приборов с большой систематической ошибкой вследствие влияния термоупругих деформаций на их крепления.
Раскрытие изобретения
Техническим результатом изобретения является повышение точности совместных измерений приборов.
Технический результат достигается за счет создания устройства для контроля взаимной ориентации и взаимного положения измерительных приборов, размещаемого на опоре, которое содержит нижнюю плиту, боковые платформы, средства крепления, предназначенные для фиксации боковых платформ и нижней плиты к опоре, а также датчики смещения и блок обработки данных, соединенный с датчиками смещения, при этом нижняя плита и боковые платформы выполнены с возможностью установки на опоре с образованием пирамидальной конструкции, при этом нижняя плита и боковые платформы взаимно расположены с зазорами вдоль ребер образуемой пирамидальной конструкции, достаточными для размещения в них датчиков смещения, при этом в каждом зазоре размещен по меньшей мере один датчик смещения, а устройство выполнено с возможностью размещения измерительных приборов на боковых платформах.
При этом образуемая пирамидальная конструкции может быть выполнена в форме треугольной, или четырехугольной, или пятиугольной, или шестиугольной пирамиды.
В каждом зазоре могут быть размещены два или три датчика смещения.
Датчик смещения может представлять собой емкостной датчик. Краткое описание чертежей
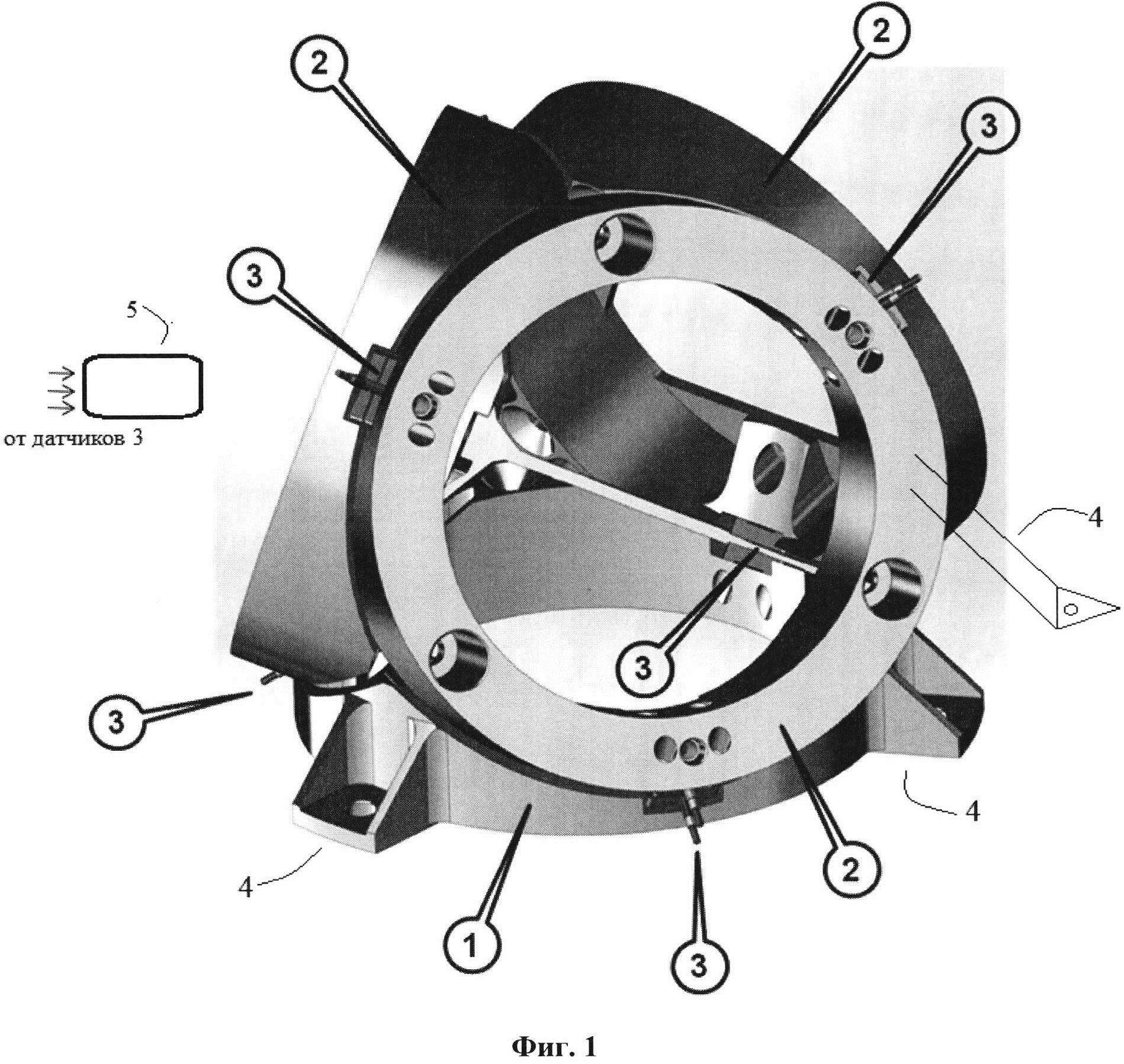
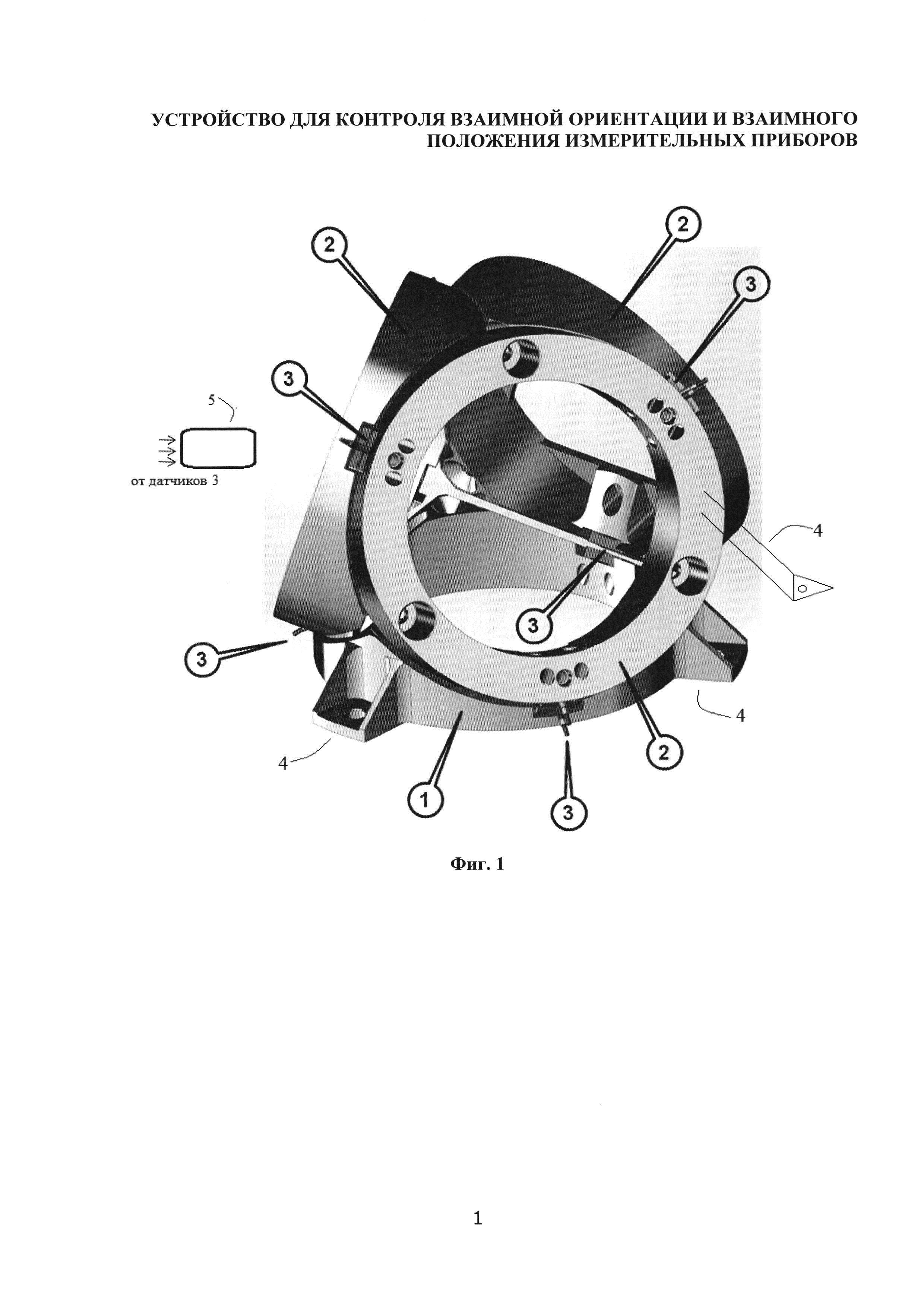
На фиг. 1 изображено устройство для контроля взаимной ориентации и взаимного положения измерительных приборов; вариант, в котором на каждое из ребер треугольной пирамиды установлен один датчик сдвига, при этом его ось перпендикулярна ребру образуемой пирамиды, на которой он установлен.
Позициями на чертежах обозначены:
1 - нижняя плита устройства;
2 - боковые платформы устройства;
3 - датчик смещения;
4 - средства крепления;
5 - блок обработки данных.
Осуществление изобретения
Устройство состоит из нижней плиты 1, боковых платформ 2, датчиков смещения 3, средств крепления 4, служащих для закрепления боковых платформ 2 и нижней плиты 1 к опоре в составе аппарата, в котором используется заявляемое устройство, а также блока обработки данных 5.
Для нижней плиты 1 типичные средства крепления 4 могут представлять собой ушки, предназначенные для крепления к опоре с помощью винтов/болтов и гаек. Для боковых платформ 2 средствами крепления 4 могут быть кронштейны, один конец которых закрепляется на боковой платформе 2, а другой - на опоре с помощью винтов/болтов/гаек.
Так, например, нижняя плита 1 может быть закреплена на опоре, которая является частью космического или летательного аппарата, или непосредственно на целевой аппаратуре.
На каждую из платформ 2 установлено по одному измерительному прибору (датчику), положение и ориентацию которого относительно нижней плиты 1 устройства необходимо контролировать. Нижняя плита 1 и боковые платформы 2 закреплены к опоре таким образом, что их плоскости образуют пирамиду (не обязательно правильную), при этом боковые платформы 2 не соприкасаются друг с другом и не соприкасаются с нижней плитой 1. Т.е. вдоль ребер образуемой пирамиды остается небольшой зазор. В зазоре вдоль каждого ребра пирамиды установлен по меньшей мере один датчик смещения 3 (на каждое ребро). А в зазорах между боковыми платформами 2 и нижней плитой 1 также установлен по меньшей мере один датчик смещения 3.
Возможно четыре варианта выполнения заявляемого устройства:
первый вариант, когда устройство содержит три боковые платформы 2, в таком случае образуется треугольная пирамида;
второй вариант - устройство содержит четыре боковые платформы 2, в таком случае образуется четырехугольная пирамида;
третий вариант - устройство содержит пять боковых платформ 2, в таком случае образуется пятиугольная пирамида;
четвертый вариант - устройство содержит шесть боковых платформ 2, в таком случае образуется шестиугольная пирамида.
Устройство с тремя боковыми платформами 2 может контролировать положение одного, двух или трех измерительных приборов, установленных на боковых платформах 2, являющихся гранями треугольной пирамиды. Если приборов меньше чем три, одна или две боковые грани останутся незанятыми. Если необходимо контролировать положение и ориентацию более чем трех приборов, то необходимо использовать устройство с соответствующим числом боковых платформ 2, образующих вместе с нижней плитой 1 многоугольную пирамиду.
Датчики смещения 3 являются одноосными, т.е. регистрируют смещение в одном направлении - вдоль оси датчика - и не реагируют на смещения поперек этой оси. Показания всех датчиков смещения передаются в блок обработки данных 5 по соединительным проводам. На основе показаний датчиков вычисляются смещения и повороты каждой боковой платформы 2 относительно нижней плиты 1.
Одним из возможных типов датчиков 3 являются емкостные датчики смещения (например, датчики серии D100, D510 фирмы Physik Instrumente). Данные датчики 3 состоят из пары контактов, образующих конденсатор. Один из контактов закреплен на одной из платформ 2, а второй на противоположной (либо на нижней плите 1). Изменение расстояния между контактами приводит к изменению емкости образуемого ими конденсатора, что регистрируется блоком обработки данных 5. Возможна конфигурация, когда датчик 3 содержит только один измерительный контакт, а вторым служит плоский участок противоположной платформы 2 (нижней плиты 1).
В качестве блока обработки данных может быть использован компьютер, обеспечивающий решение системы линейных алгебраических уравнений, в результате чего показания датчиков смещения переводят в данные изменения положения и поворота граней пирамиды, составляющей заявляемое устройство.
Каждая боковая платформа 2 и, соответственно, установленный на ней прибор имеют 6 степеней свободы, например три координаты положения в пространстве центра платформы и три угла ее разворота в пространстве. Для устройства, содержащего N боковых платформ, число степеней свободы будет равно 6N.
При установке на каждое ребро образуемой пирамиды устройства трех датчиков смещения 3 число измеряемых параметров оказывается равным числу степеней свободы. Для определения положений и разворотов всех платформ 2 необходимо решить линейную систему из 6N уравнений относительно 6N неизвестных (параметров степеней свободы). Система является невырожденной, если оси датчиков 3 не параллельны друг другу.
Если число датчиков 3, установленных на ребре пирамиды, менее трех, то линейная система уравнений содержит менее 6N уравнений относительно тех же 6N переменных и, соответственно, является недоопределенной. В результате решения этой системы может быть определено значение лишь части параметров или будут определены некоторые линейные комбинации этих параметров.
Число датчиков 3 более трех на ребре образуемой пирамиды позволяет сохранить работоспособность устройства при выходе из строя одного или нескольких датчиков.
Решение полной системы уравнений позволяет определить все параметры (и положения, и разворота) боковых платформ 2, но требует установки трех датчиков смещения 3 на ребро пирамиды, что делает устройство сложнее и дороже.
При меньшем числе датчиков смещения 3 определяются не все параметры, но они не всегда бывают нужны. Так при использовании в качестве контролируемых приборов звездных датчиков ориентации смещения центров платформ неважны, необходимо определить только углы разворота боковых платформ 2 устройства, а для узкопольных звездных датчиков достаточно определять только изменения направления нормали к боковой платформе 2. В первом случае для определения этих параметров необходимо решить систему 3N уравнений (достаточно 2 датчиков смещения на ребро), в последнем - 2N уравнений (достаточно 1 датчика смещения на ребро).
Как один из вариантов выполнения изобретения: заявляемое устройство также может быть закреплено на единой плоской опорной пластине, которая в свою очередь будет крепится на опоре в составе аппарата.
Устройство работает следующим образом.
Рассмотрим работу устройства на примере конфигурации с тремя боковыми платформами 2. Нижняя плита 1 и три боковые платформы 2 закреплены посредством креплений 4 на опоре аппарата (например, космического корабля). Таким образом, плоскости нижней платформы 1 и трех боковых платформ 2 образуют треугольную пирамиду. В зазоре вдоль каждого ребра пирамиды установлены по три датчика смещения 3, и в зазоре между боковыми платформами 2 и нижней плитой 1 также установлено по три датчика смещения 3 (т.е. в общей сложности 18 датчиков смещения). При смещении одной или нескольких боковых платформ 2 с установленными на них датчиками 3 показания всех или части датчиков смещения 3 изменятся. Эти показания всех 18 датчиков смещения 3 передаются в блок обработки данных 5 по соединительным проводам. В блоке обработки данных 5 на основе показаний всех 18 датчиков смещения 3 вычисляются ориентация и смещения трех боковых платформ 2 относительно нижней плиты 1.
Предлагаемое устройство позволяет одновременно с высокой точностью контролировать положение и ориентацию (поворот или разворот) нескольких измерительных приборов (датчиков) относительно опоры в составе аппарата, т.е. позволяет исключить влияния систематических погрешностей взаимного положения и ориентации приборов, вызываемых термоупругими деформациями креплений. Каждый из контролируемых приборов может смещаться на некоторое расстояние и поворачиваться на некоторый угол в процессе эксплуатации. Типичные смещение и поворот невелики: смещение не превышает сотен микрон, а поворот - нескольких угловых секунд.
Двухканальный космический телескоп для одновременного наблюдения земли и звезд со спектральным разведением изображения
Способ измерения угловых координат солнца и реализующее его устройство
Устройство для определения ориентации объекта по звездам
Способ повышения точности определения ориентации по звездам и длительного поддержания повышенной точности определения ориентации и устройство для их реализации
Способ обзора космического пространства между солнцем и землёй, недоступного для наблюдения оптическими средствами, находящимися на земле и на околоземных орбитах, из-за их засветки солнцем, с космического аппарата, размещённого на орбите земли на постоянном расстоянии от земли
Космическая система обзора небесной сферы для наблюдения небесных объектов и обнаружения опасных для земли небесных тел - астероидов и комет
Способ и устройство (варианты) для определения ориентации космических или летательных аппаратов
Способ и устройство для определения ориентации космических или летательных аппаратов
Способ определения ориентации космических или летательных аппаратов и устройство его реализующее
Способ и устройство для определения ориентации космических или летательных аппаратов

