Результат интеллектуальной деятельности: СИСТЕМА УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ И СПОСОБ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к ультразвуковой визуализации, более конкретно, к системе ультразвуковой визуализации и способу ультразвуковой визуализации для улучшения качества изображения желаемой плоскости изображения в интересующем объеме объекта.
УРОВЕНЬ ТЕХНИКИ
Обычный одномерный (1D) ультразвуковой зонд содержит линию элементов преобразователя, из которых могут испускаться ультразвуковые сигналы. Кроме того, плоскость изображения под элементами преобразователя может просматриваться посредством регистрации отраженных ультразвуковых эхо-сигналов, исходящих от неоднородностей наблюдаемой области. При правильном размещении и перемещении ультразвукового преобразователя, удается наблюдать интересующий объем объекта, содержащий, например, повреждение ткани.
При ультразвуковой визуализации интересующего объема, клинической проблемой для медиков, особенно для начинающих медиков, оказывается то, как найти плоскость изображения для интересующего объема, которая является подходящей или желательной для определенной клинической задачи. Способствование медикам в отыскании желаемой плоскости изображения очень значимо и весьма необходимо для клинических медиков. В связи с компьютеризированными методиками, данные 2D изображения, получаемые одномерным ультразвуковым зондом, могут не обеспечить достаточной информации для этого, поскольку человеческое тело - это 3D объект. В настоящее время, исследования, выполняемые с этой целью, главным образом, основаны на 3D данных (полученных с использованием матричного преобразователя, содержащего двумерную решетку элементов преобразователя) или данных большей размерности, и как только данные большей размерности получены, может быть определена желаемая плоскость изображения с объектом, необходимым для наблюдения медиками, и может быть отображено соответствующее 2D изображение желаемой плоскости изображения.
Что касается двумерного матричного ультразвукового преобразователя, такой преобразователь может содержать решетку элементов ультразвукового преобразователя, размещенных в столбцах и строках. Лицевая сторона сетки преобразователя может быть и прямоугольной, как в случае одномерного ультразвукового преобразователя, но решетка элементов преобразователя размещается в двумерной матрице. Это дополнительное усложнение может позволить управление ультразвуковыми пучками и их фокусировку в трехмерном пространстве, а не только в плоскости. Как известно специалистам в данной области техники, двумерный матричный ультразвуковой преобразователь может получать трехмерные данные объема интересующего объема из данных ультразвукового эха множества плоскостей сканирования в интересующем объеме. Множество плоскостей сканирования может быть определено установочными параметрами для элементов преобразователя, например, тем, какие линии, или строки, задействованы, и параметрами формирования пучка для задействованных элементов.
Как только трехмерные данные объема интересующего объема получены, любая желаемая плоскость изображения может быть восстановлена с помощью алгоритмов компьютерной обработки, например, интерполяцией данных ультразвукового эха множества плоскостей сканирования.
Вместе с тем, хотя для медиков может быть и проще найти желаемую плоскость изображения для интересующего объема с двумерным матричным ультразвуковым преобразователем, качество восстановленного и отображаемого 2D изображения желаемой плоскости изображения может оказаться неудовлетворительным.
Конкретно, имеющееся автоматизированное средство для восстановления 2D изображения желаемой плоскости изображения имеет некоторые недостатки, например, фиксированное действие передающих элементов матричного преобразователя, независимо от желаемой плоскости изображения, и т.д. Иначе говоря, изображение определенной, желаемой для отображения плоскости не может быть создано в направлении передачи ультразвукового сигнала. Поскольку ультразвуковой сигнал подвергается процессу фокусировки и соответствующему процессу интерполяции, если изображение желаемой плоскости изображения не создается в направлении передачи (то есть, не создается данными ультразвукового эха самой желаемой плоскости изображения), но восстанавливается интерполяцией данных ультразвукового эха множества плоскостей сканирования в интересующем объеме, то качество создаваемого 2D изображения может подвергаться существенному воздействию, и иногда клинический диагноз не может быть выполнен для некоторых приложений, где требуется высокое качество данных.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Поэтому, имеется потребность в новой системе ультразвуковой визуализации, и в способе, который позволит улучшить качество отображения желаемой плоскости изображения.
В соответствии с объектом настоящего изобретения предлагается система ультразвуковой визуализации, содержащая:
ультразвуковой зонд с двумерной решеткой элементов преобразователя для передачи ультразвуковых сигналов и получения трехмерных данных объема интересующего объема объекта, когда зонд помещается в первое положение на объекте и наклонен под первым углом относительно интересующего объема, и элементы преобразователя зонда имеют первый набор установочных параметров, причем трехмерные данные объема интересующего объема содержат данные ультразвукового эха множества плоскостей сканирования, задаваемых первым набором установочных параметров;
процессор для определения желаемой плоскости изображения для интересующего объема в соответствии с трехмерными данными объема, и для определения результата - имеется ли второй набор установочных параметров, такой, что ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих второй набор установочных параметров, имел бы возможность получать данные ультразвукового эха желаемой плоскости изображения без перемещения зонда, причем процессор, дополнительно сконфигурирован для выведения - если результат - ДА, - второго набора установочных параметров и для выведения - если результат - НЕТ, - второго положения, второго угла и третьего набора установочных параметров, так, что когда зонд перемещается во второе положение на объекте и наклоняется под вторым углом относительно интересующего объема, ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих третий набор установочных параметров, имел бы возможность вывести данные ультразвукового эха желаемой плоскости изображения;
контроллер преобразователя для регулировки элементов преобразователя в соответствии с выведенным вторым набором установочных параметров, если результат - ДА, и для регулировки элементов преобразователя в соответствии с выведенным третьим набором установочных параметров, если результат - НЕТ; и
дисплей для вывода, если результат - НЕТ, команды для указания пользователю системы ультразвуковой визуализации на необходимость перемещения зонда так, чтобы он был установлен во второе положение и был наклонен под вторым углом.
Таким образом, оказывается возможным непосредственно сканировать желаемую плоскость изображения, эксплуатируя возможность 2D матричного ультразвукового преобразователя и/или вариативность положения/ориентации ультразвукового зонда. В некоторых случаях, установочные параметры элементов преобразователя могут быть отрегулированы так, чтобы ультразвуковой сигнал, передаваемый от элементов преобразователя, имел возможность выводить данные ультразвукового эха желаемой плоскости изображения без перемещения зонда. В других случаях, когда желаемая плоскость изображения не может быть непосредственно сканирована без изменения положения/ориентации ультразвукового зонда, регулировка положения/ориентации ультразвукового зонда возможна посредством взаимодействия с пользователем, а именно, посредством выведения команды для указания пользователю на необходимость перемещения зонда, так, чтобы получить возможность непосредственного сканирования желаемой плоскости изображения.
Таким образом, изображение желаемой плоскости изображения не восстанавливается интерполяцией данных ультразвукового эха множества плоскостей сканирования (которые определяются установочными параметрами элементов преобразователя), но изображение восстанавливается из данных ультразвукового эха самой желаемой плоскости изображения. Иначе говоря, желаемая плоскость изображения сканируется непосредственно. Таким образом, качество изображения желаемой плоскости изображения улучшается, что может помочь медикам осуществлять более точный диагноз.
В варианте реализации настоящего изобретения, установочные параметры элементов преобразователя содержат то, какие элементы преобразователя задействованы и параметры формирования пучка для задействованных элементов преобразователя.
Как будет ясно специалистам в данной области техники, параметры формирования пучка элементов преобразователя могут содержать, например, фазу ультразвуковых сигналов, передаваемых каждым из задействованных элементов преобразователя и/или векторы формирования пучка, выбранные в элементе формирования пучка на стороне приема, чтобы синтезировать данные эха ультразвуковых сигналов, передаваемых задействованными элементами преобразователя.
В варианте реализации настоящего изобретения, элементы преобразователя, которые должны быть задействованы, определяются сначала, и затем определяются параметры формирования пучка для задействованных элементов.
Посредством первого определения соответствующих элементов преобразователя, которые должны быть задействованы, оказывается возможным предварительно ограничить набор плоскостей, которые могут быть отображены в интересующем объеме. Вместе с тем, если не задействуются все элементы, то затраты на обработку снижаются. Кроме того, соответствующее уточненное направление передаваемого сигнала затем определяется регулировкой параметров формирования пучка для задействованных элементов. Таким образом, передаваемый сигнал от задействованных элементов соответствует исключительно желаемой плоскости изображения.
В варианте реализации настоящего изобретения, процессор сконфигурирован для автоматического определения желаемой плоскости изображения для интересующего объема в соответствии с трехмерными данными объема, клинической целью и заданной моделью.
Учитывая предварительную информацию о плоскостях, которые медики хотят видеть, оказывается возможным иметь различные доступные опции, если заданная модель была установлена для различных клинических целей. Способы регистрации плоскости могут быть различными преобразованиями Хафа, способами на основе сегментации или графическими моделями различных объектов, и т.д. Следует отметить, что автоматическое определение желаемой плоскости изображения реализуется здесь в реальном времени, что может предоставить больше информации для всего процесса и для следующего плана сканирования, по сравнению с обычными подходами.
В другом варианте реализации настоящего изобретения, система ультразвуковой визуализации может дополнительно содержать пользовательский интерфейс для приема входных сигналов пользователя. В этом случае, дисплей может быть дополнительно сконфигурирован для отображения множества изображений, восстановленных из трехмерных данных объема, и процессор может быть дополнительно сконфигурирован для определения желаемой плоскости изображения для интересующего объема в соответствии с выбором в руководстве пользователя, исходя из множества изображений, восстанавливаемых из трехмерных данных объема.
Если автоматически определенная плоскость изображения не достаточно хороша, или автоматическая опция не доступна, медики сами должны найти плоскости. В пределах трехмерных данных объема, медики вручную перемещают плоскость, и положение плоскости должно быть отображено в полных текущих 3D данных. Поскольку это должно быть выполнено в реальном времени в течение процесса сканирования, интерпретация отображаемого 2D изображения не должна быть более сложной, чем обычная операция сканирования. Вместе с тем предоставляется пространственная информация, которая делает интерпретацию изображения для медиков более удобной.
В соответствии с другим объектом настоящего изобретения, предлагается способ ультразвуковой визуализации, содержащий:
передачу ультразвуковых сигналов и получение трехмерных данных объема интересующего объема объекта с ультразвуковым зондом, имеющим двумерную решетку элементов преобразователя, причем зонд помещается в первое положение на объекте и наклоняется под первым углом относительно интересующего объема, и элементы преобразователя зонда имеют первый набор установочных параметров, и причем трехмерные данные объема интересующего объема содержат данные ультразвукового эха множества плоскостей сканирования, задаваемых первым набором установочных параметров;
определение желаемой плоскости изображения для интересующего объема в соответствии с трехмерными данными объема;
определение результата - имеется ли второй набор установочных параметров, такой, что ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих второй набор установочных параметров, имел бы возможность получать данные ультразвукового эха желаемой плоскости изображения без перемещения зонда;
выведение, если результат - ДА: - второго набора установочных параметров, и, если результат - НЕТ: - выведение второго положения, второго угла и третьего набора установочных параметров, так, что, когда зонд перемещается во второе положение на объекте и наклонен под вторым углом относительно интересующего объема, ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих третий набор установочных параметров, имел бы возможность вывести данные ультразвукового эха желаемой плоскости изображения; и
регулировку элементов преобразователя в соответствии с выведенным вторым набором установочных параметров, если результат - ДА, и вывод команды для указания пользователю системы ультразвуковой визуализации на необходимость перемещения зонда, так, чтобы он был установлен во втором положении и наклонен под вторым углом, и регулировку элементов преобразователя в соответствии с выведенным третьим набором установочных параметров, если результат - НЕТ.
Как отмечено выше, способ ультразвуковой визуализации в соответствии с настоящим изобретением может улучшить качество изображения желаемой плоскости изображения, и может помочь медикам устанавливать более точный диагноз, поскольку изображение желаемой плоскости изображения не восстанавливается обработкой данных изображения одной или нескольких плоскостей изображения, отличных от желаемой плоскости изображения, но непосредственной обработкой данных изображения желаемой плоскости изображения.
Различные объекты и признаки раскрытия описаны ниже более подробно. Эти и другие объекты изобретения поясняются в отношении описываемого ниже варианта (-ов) реализации.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение описывается и поясняется ниже более подробно в комбинации с вариантами реализации и в связи с чертежами, причем:
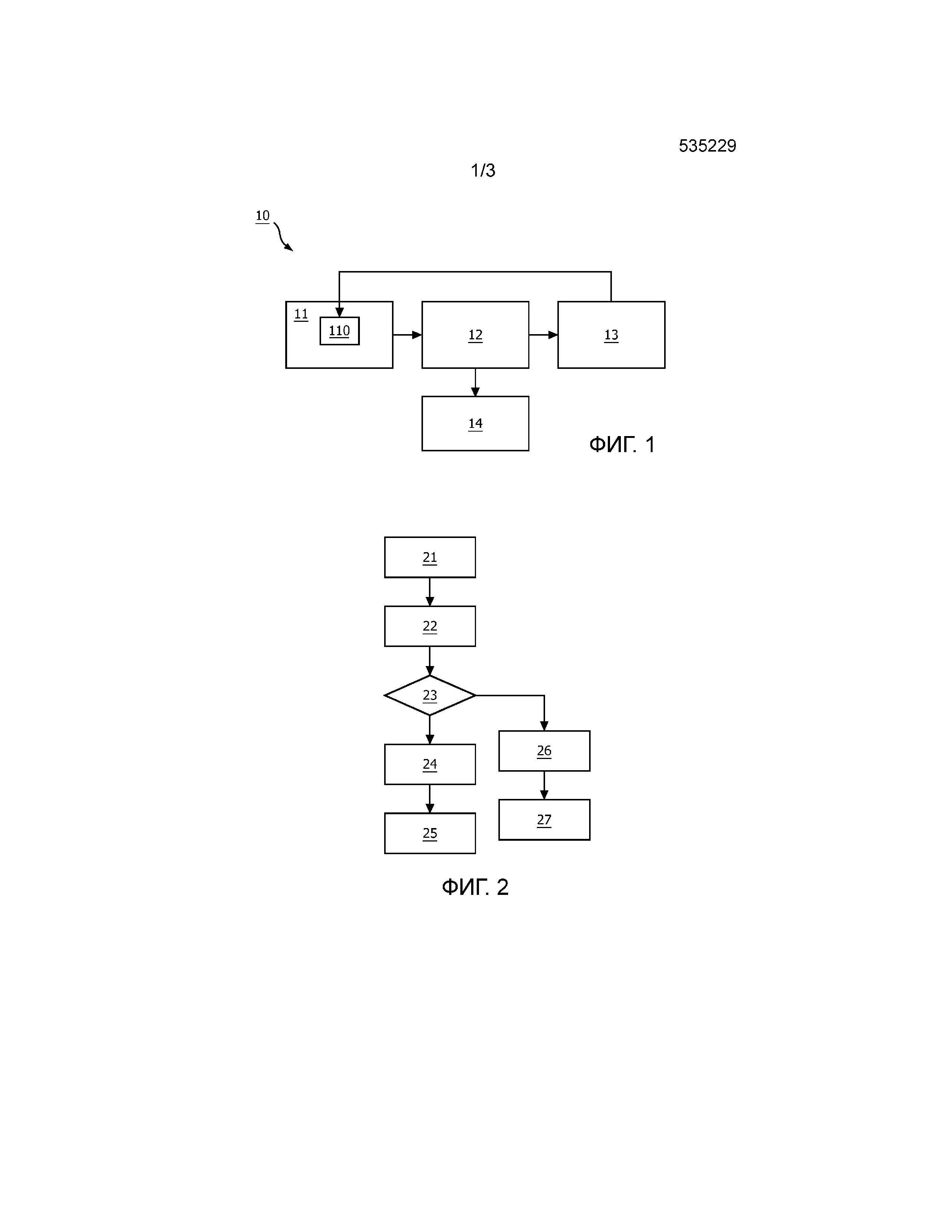
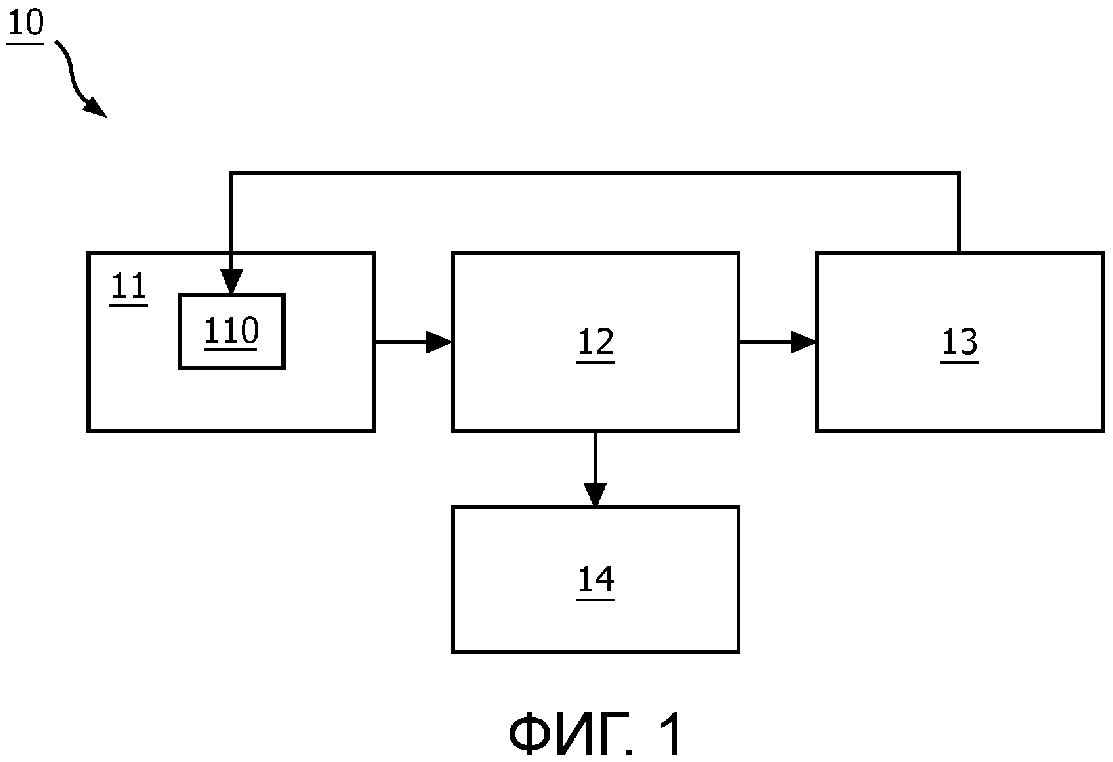
Фиг.1 изображает блок-схему системы 10 ультразвуковой визуализации в соответствии с настоящим изобретением;
Фиг.2 - блок-схема способа 20 ультразвуковой визуализации в соответствии с настоящим изобретением;
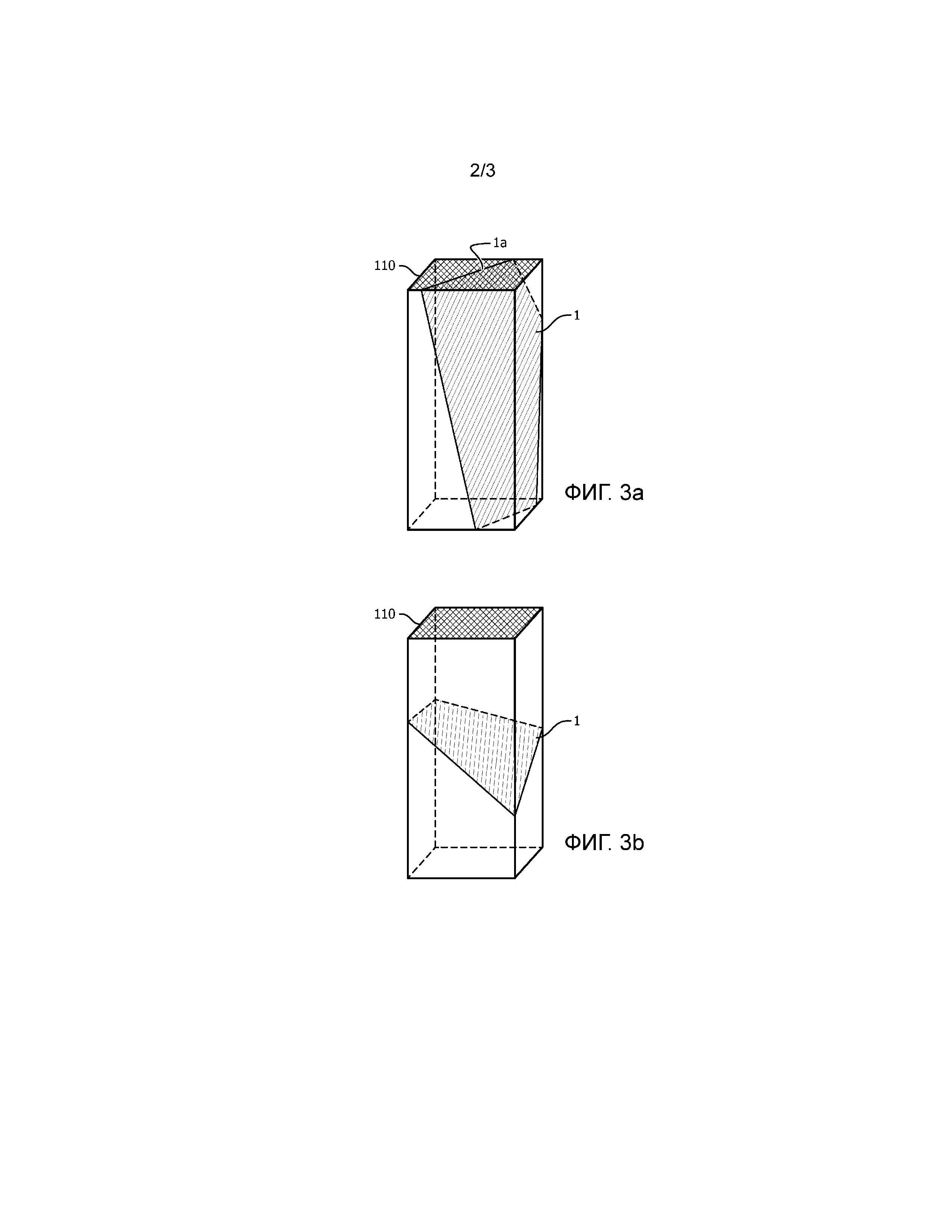
Фиг.3a показывает условие, когда желаемая плоскость изображения пересекается с двумерной решеткой элементов преобразователя, и Фиг.3b - условие, когда желаемая плоскость изображения не пересекается с двумерной решеткой элементов преобразователя; и
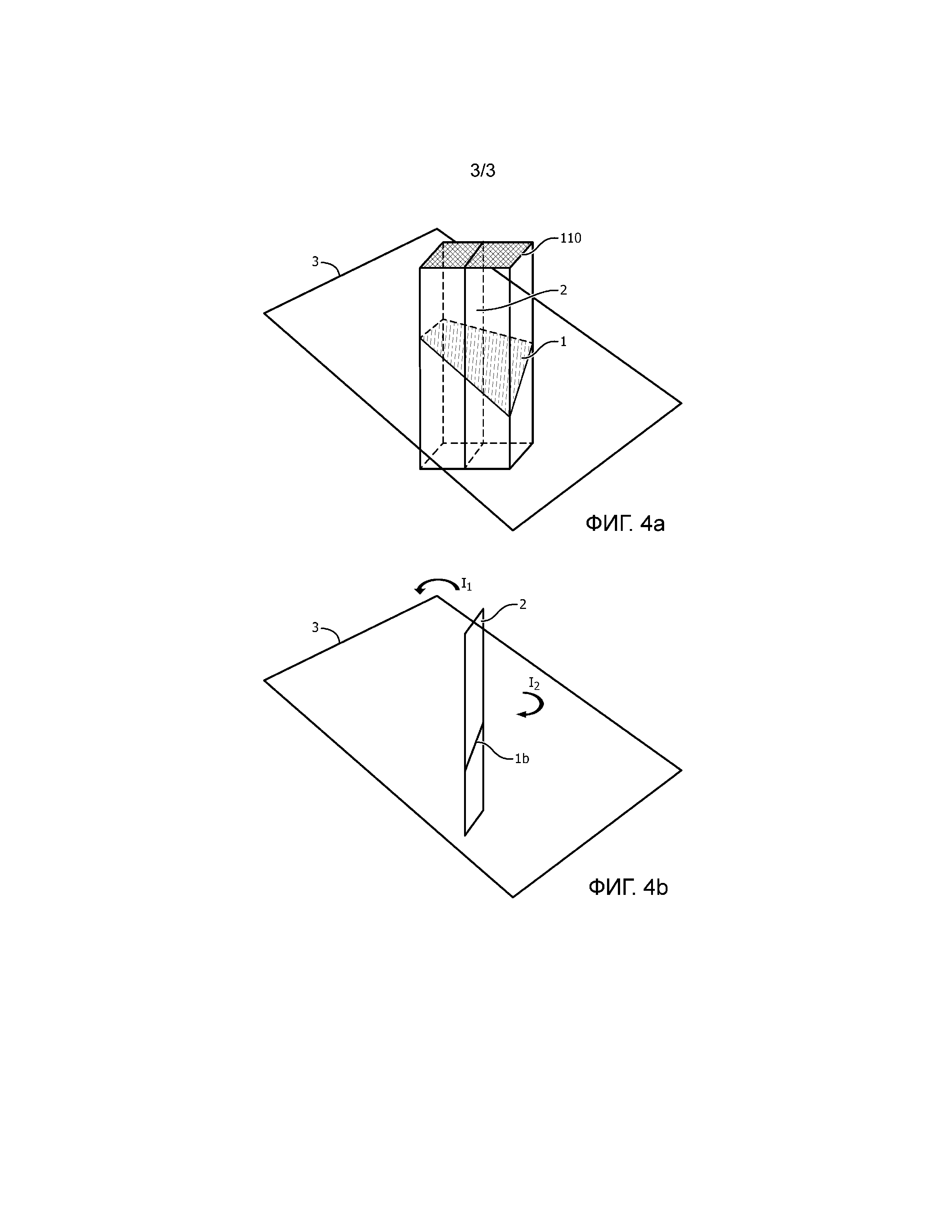
Фиг.4a и Фиг.4b - иллюстрация для случая на Фиг.3b того, как дисплей системы 10 ультразвуковой визуализации выводит команду для указания пользователю системы ультразвуковой визуализации на необходимость перемещения зонда в соответствии с вариантом реализации настоящего изобретения.
Одинаковые условные обозначения на чертежах указывают подобные или соответствующие признаки и/или функциональные возможности.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее изобретение описывается в связи с конкретными вариантами реализации и в связи с определенными чертежами, но изобретение не ограничивается этим, но только посредством приложенной формулы. Описываемые чертежи являются только схематическими и не ограничивающими. На чертежах, размер некоторых из элементов может быть преувеличен и может быть не приведен в соответствующем масштабе в целях иллюстрации.
На Фиг.1 показана блок-схема системы 10 ультразвуковой визуализации в соответствии с настоящим изобретением.
Далее, детали системы 10 ультразвуковой визуализации описываются в связи с чертежом на Фиг.2, который представляет собой блок-схему способа 20 ультразвуковой визуализации в соответствии с настоящим изобретением.
Как можно видеть из Фиг.1, система 10 ультразвуковой визуализации настоящего изобретения содержит ультразвуковой зонд 11. В соответствии с настоящим изобретением, двумерная решетка элементов 110 преобразователя используется в зонде 11 для передачи ультразвуковых сигналов и получения трехмерных данных объема интересующего объема объекта (этап 21 на Фиг.2). Например, объект может быть пациентом, и интересующий объем объекта может быть органом пациента.
Далее, положение, в котором зонд 11 помещается на объекте, когда получаются трехмерные данные объема, обозначается как первое положение, и угол, под которым зонд наклонен относительно интересующего объема, обозначается как первый угол.
Кроме того, как легко может понять специалист в данной области техники, двумерный матричный ультразвуковой преобразователь может содержать решетку элементов 110 ультразвукового преобразователя, размещенных в столбцах и строках. Лицевая сторона решетки преобразователей может быть и прямоугольной, как в случае одномерного ультразвукового преобразователя, но решетка элементов преобразователя размещена в двумерной матрице. Во время получения трехмерных данных объема, первый набор установочных параметров задается для элементов 110 преобразователя зонда 11. Иначе говоря, первый набор установочных параметров определяет то, какие элементы преобразователя задействованы, а также параметры формирования пучка для задействованных элементов преобразователя. Поэтому, первый набор установочных параметров определяет, что множество плоскостей сканирования двумерного матричного ультразвукового преобразователя размещено в столбцах или в строках, или даже в диагональных направлениях. Соответственно, полученные трехмерные данные объема интересующего объема содержат данные ультразвукового эха множества плоскостей сканирования, задаваемых первым набором установочных параметров.
Как можно видеть из Фиг.1, система 10 ультразвуковой визуализации в соответствии с вариантом реализации настоящего изобретения дополнительно содержит процессор 12 для определения желаемой плоскости 1 изображения для интересующего объема в соответствии с трехмерными данными объема (этап 21 на Фиг.2).
В варианте реализации настоящего изобретения, процессор 12 может быть сконфигурирован для автоматического определения желаемой плоскости 1 изображения для интересующего объема в соответствии с полученными трехмерными данными объема, клинической целью и заданной моделью.
Используя предшествующее знание о плоскостях, которые медики хотят видеть, различные опции могут быть сделаны доступными, если заданная модель была установлена для различных клинических целей. Способы регистрации плоскости могут быть различными преобразованиями Хафа, способами на основе сегментации, или графическими моделями различных объектов, и т.д. Следует отметить, что автоматическое определение желаемой плоскости изображения реализуется здесь в реальном времени, что может предоставить подробную информацию для всего процесса и для следующего плана сканирования, по сравнению с обычными подходами.
В другом варианте реализации настоящего изобретения, система 10 ультразвуковой визуализации может дополнительно содержать пользовательский интерфейс для приема входного сигнала пользователя. В этом случае, дисплей может быть дополнительно сконфигурирован для отображения множества изображений, восстановленных из трехмерных данных объема, и процессор 12 может быть дополнительно сконфигурирован для определения желаемой плоскости 1 изображения для интересующего объема в соответствии с выбором в руководстве пользователя, исходя из множества изображений, восстановленных из трехмерных данных объема.
Если автоматически определенная плоскость изображения не достаточно хороша, или автоматическая опция не доступна, ультразвуковая система может быть дополнительно сконфигурирована так, чтобы позволить медикам самим находить плоскости. В пределах трехмерных данных объема, медикам можно предоставить средства ручного перемещения плоскости, и положение плоскости должно быть отображено в полных текущих трехмерных данных. Поскольку это должно быть выполнено в реальном времени в течение процесса сканирования, интерпретация отображенного 2D изображения не должна быть более сложной, чем обычная операция сканирования. Вместе с тем, предоставляется пространственная информация, которая делает интерпретацию изображения более удобной для медиков.
Как легко могут понять специалисты в данной области техники, желаемая плоскость 1 изображения для интересующего объема определяется посредством рассмотрения конкретной анатомической структуры интересующего объема и конкретной цели в интересующем объеме, например, потенциального повреждения ткани и, поэтому, обычно не является одной из плоскостей сканирования. Однако, только изображение плоскости сканирования создается из передаваемого сигнала в направлении передачи. Если желаемая плоскость 1 изображения не является одной из плоскостей сканирования, ее изображение не восстанавливается в направлении передачи ультразвукового сигнала, то есть, не создается данными ультразвукового эха самой желаемой плоскости изображения, но восстанавливается интерполяцией данных ультразвукового эха множества плоскостей сканирования в интересующем объеме, но качество восстановленного 2D изображения может быть сильно ухудшено, и иногда клинический диагноз не может быть выполнен для тех применений, где требуется высокое качество данных.
В связи с вышеизложенным, настоящее изобретение эксплуатирует возможность 2D матричного ультразвукового преобразователя, в котором задействованные элементы преобразователя и параметры формирования пучка для задействованных элементов могут быть отрегулированы так, чтобы ультразвуковой сигнал, передаваемый от задействованных элементов преобразователя, имел возможность получить данные ультразвукового эха желаемой плоскости изображения без перемещения зонда, или после перемещения зонда к другому положению и наклонения его под другим углом относительно интересующего объема.
Соответственно, процессор, 12 настоящего изобретения дополнительно используется для определения результата - имеется ли второй набор установочных параметров, такой, что ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих второй набор установочных параметров, имел бы возможность получать данные ультразвукового эха желаемой плоскости изображения без перемещения зонда 11 (этап 23 на Фиг.2).
Если результат - ДА, процессор 12 дополнительно конфигурируется для выведения второго набора установочных параметров (этап 24 на Фиг.2). В этом случае, контроллер 13 преобразователя, содержащийся в системе 10 ультразвуковой визуализации, тогда регулирует элементы 110 преобразователя в соответствии с выведенным вторым набором установочных параметров (этап 25 на Фиг.2).
Однако, если результат - НЕТ, то есть, если зонд 11 был перемещен (то есть, или первое положение или первый угол, или даже и первое положение, и первый угол, должны быть изменены), процессор 12 дополнительно конфигурируется для выведения второго положения и второго угла для зонда 11 и выведения третьего набора установочных параметров для элементов 110 преобразователя, так, что когда зонд 11 перемещается во второе положение на объекте и наклоняется под вторым углом относительно интересующего объема, ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих третий набор установочных параметров, имел бы возможность вывести данные ультразвукового эха желаемой плоскости изображения (этап 26 на Фиг.2). В этом случае, контроллер преобразователя 13 затем регулирует элементы 110 преобразователя в соответствии с выведенным третьим набором установочных параметров (этап 27 на Фиг.2).
В варианте реализации настоящего изобретения, процессор 12 выполняет этапы 23, 24 и 26 на основании пространственного позиционного соотношения между первым положением и первым углом зонда и желаемой плоскостью 1 изображения и на основании размещения элементов 110 преобразователя.
Система 10 ультразвуковой визуализации в соответствии с вариантом реализации настоящего изобретения дополнительно содержит дисплей 14. Если результат - НЕТ, то есть, если зонд 11 перемещен, дисплей 14 используется для выведения команды для указания пользователю системы 10 ультразвуковой визуализации на необходимость перемещения зонда 11, так, чтобы он был установлен во второе положение и был наклонен под вторым углом. Схематический вид того, как указать пользователю на необходимость перемещения зонда 11, показан на Фиг.4a и Фиг.4b, и это будет объяснено далее.
В варианте реализации настоящего изобретения, дисплей 14 дополнительно сконфигурирован для отображения изображения желаемой плоскости 1 изображения, которая восстановлена из данных ультразвукового эха желаемой плоскости 1 изображения.
Таким образом, изображение желаемой плоскости 1 изображения не восстанавливается интерполяцией данных ультразвукового эха множества плоскостей сканирования (которые соответствуют ультразвуковым сигналам, передаваемым от начальных задействованных элементов, и начальным параметрам формирования луча), но восстанавливается из данных ультразвукового эха желаемой плоскости изображения непосредственно. Таким образом, качество изображения желаемой плоскости 1 изображения улучшается и может помочь медикам проводить более точный диагноз.
Детали этапа 23, то есть, определения того, имеется ли второй набор установочных параметров, такой, что ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих второй набор установочных параметров, имел бы возможность получать данные ультразвукового эха желаемой плоскости изображения без перемещения зонда 11, дополнительно рассматриваются ниже в связи с Фиг.3a и 3b, которые показывают, соответственно, условие, когда желаемая плоскость 1 изображения пересекается с двумерной решеткой элементов 110 преобразователя, и условие, когда желаемая плоскость 1 изображения не пересекается с двумерной решеткой элементов 110 преобразователя.
Как может быть понято из Фиг.3a, в случае, когда желаемая плоскость 1 изображения пересекается с двумерной решеткой элементов 110 преобразователя, определяется, что результатом является ДА, то есть, имеется второй набор установочных параметров, такой, что ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих второй набор установочных параметров, имеет возможность получать данные ультразвукового эха желаемой плоскости изображения без перемещения зонда 11.
Соответственно, элементы преобразователя на линии 1a пересечения будут задействованы, и элементы преобразователя, смежные с линией 1a пересечения, обычно будут задействованы. Это может предварительно ограничивать набор плоскостей, которые могут быть отображены в интересующем объеме.
Кроме того, соответствующее уточненное направление передаваемого сигнала определено настроечными параметрами формирования пучка для задействованных элементов. Таким образом, передаваемый сигнал от задействованных элементов уникально соответствует желаемой плоскости 1 изображения.
Как может быть понято из Фиг.3b, в случае, когда желаемая плоскость 1 изображения не пересекается с двумерной решеткой элементов 110 преобразователя, определяется, что результатом является НЕТ, то есть, нет второго набора установочных параметров, такого, что ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих второй набор установочных параметров, имел бы возможность получать данные ультразвукового эха желаемой плоскости изображения без перемещения зонда 11. Иначе говоря, в соответствии с ограниченным масштабом двумерной решетки элементов 110 преобразователя, желаемая плоскость 1 изображения, которая не пересекается с двумерной решеткой элементов 110 преобразователя, не может быть отображена с реальным передаваемым сигналом элементов без перемещения зонда в другое положение, отличающееся от первого положения.
Как упомянуто выше, если результат - НЕТ, то есть, если зонд 11 перемещен, процессор 12 дополнительно конфигурируется для выведения второго положения и второго угла для зонда 11, и выведения третьего набора установочных параметров для элементов 110 преобразователя, так, чтобы когда зонд 11 перемещается во второе положение на объекте и наклоняется под вторым углом относительно интересующего объема, ультразвуковой сигнал, передаваемый от элементов преобразователя, имеющих третий набор установочных параметров, имел бы возможность вывести данные ультразвукового эха желаемой плоскости изображения (этап 26 на Фиг.2).
Как легко поймут специалисты в данной области техники, обычно второе положение и второй угол отличаются и от первого положения, и от первого угла. Однако, в некоторых случаях, второй угол может быть тем же самым, что и первый угол.
На Фиг.4a и Фиг.4b показано, в случае Фиг.3b, как дисплей 14 системы ультразвуковой визуализации выводит команду для указания пользователю системы ультразвуковой визуализации на необходимость перемещения зонда в соответствии с вариантом реализации настоящего изобретения.
Как отмечено выше, в случае Фиг.3b, желаемая плоскость 1 изображения не пересекается с двумерной решеткой элементов 110 преобразователя. Как показано на Фиг.4a и 4b, в соответствии с размещением элементов 110 преобразователя, средняя опорная плоскость 2, которая находится под средней линией решетки элементов 110 преобразователя, может быть определена. Кроме того, в соответствии с пространственным позиционным соотношением между первым положением и первым углом зонда 11 и желаемой плоскостью 1 изображения, вторым положением, вторым углом и третьим набором установочных параметров, таким, что когда зонд 11 перемещается во второе положение на объекте и наклонен под вторым углом относительно интересующего объема, ультразвуковой сигнал, передаваемый от элементов 110 преобразователя, имеющих третий набор установочных параметров, имеет возможность вывести данные ультразвукового эха желаемой плоскости 1 изображения.
Например, в соответствии с пространственным позиционным соотношением между средней опорной плоскостью 2 и плоскостью 3 в 3D пространстве, содержащем желаемую плоскость 1 изображения, процессор 12 имеет возможность вычислить второе положение, в которое зонд 11 должен быть перемещен. Кроме того, в соответствии с пространственным позиционным соотношением между средней линией решетки элементов 110 преобразователя и линией 1b пересечения средней опорной плоскости 2 с желаемой плоскостью 1 изображения, процессор 12 имеет возможность вычислить второй угол, под которым зонд 11 должен быть наклонен относительно интересующего объема. После этого, процессор 12 может вывести, что во втором положении и при втором угле элементы преобразователя на средней линии решетки (и некоторые элементы, смежные со средней линией) должны быть задействованы, и параметры формирования пучка для задействованных элементов преобразователя могут быть определены соответственно, так, чтобы желаемая плоскость 1 изображения могла быть непосредственно получена передающим сигналом от задействованных элементов.
Как поймут специалисты в данной области техники, вышеупомянутая средняя опорная плоскость 2 используется только как вариант реализации; другие опорные плоскости также могут быть использованы, и второе положение, второй угол и третий набор установочных параметров могут быть подобным образом выведены в соответствии с выбором опорной плоскости.
Если второе положение и второй угол были выведены, дисплей 14 системы 10 ультразвуковой визуализации тогда выводит команду для указания пользователю системы 10 ультразвуковой визуализации на необходимость перемещения зонда 11, например, в направлении перемещения, обозначенном I1 на Фиг.4b для указания пользователю на необходимость перемещения зонда 11 во второе положение, и направление поворота, обозначенное I2 на Фиг.4b для указания пользователю необходимости достижения второго угла зонда 11. Команда может быть выведена в формате текста, графических символов, или комбинации этого. В некоторых вариантах реализации, дисплей 14 имеет возможность выведения аудио информации, и команда может быть выведена в звуковом формате.
Кроме того, как может быть легко понято специалистами в данной области техники, в пункте формулы на устройство, перечисляющем несколько средств, некоторые из этих средств могут быть воплощены одним и тем же элементом аппаратных средств. То, что некоторые средства приведены во взаимно различающихся зависимых пп. формулы, не означает, что комбинация этих средств не может быть использована для получения пользы.
Следует отметить, что вышеупомянутые варианты реализации иллюстрируют, а не ограничивают изобретение, и что специалисты в данной области техники будут иметь возможность разработать альтернативные варианты реализации, не отступая от объема притязаний приложенной формулы. В пп. формулы, любые условные обозначения, помещенные между круглыми скобками, не должны рассматриваться как ограничение формулы. Выражение "содержащий" не исключает присутствия элементов или этапов, не перечисленных в формуле или в описании. Обозначение элемента в единственном числе не исключает наличия множества таких элементов. В пунктах формулы на систему, перечисляющих несколько блоков, некоторые из этих блоков могут быть воплощены одним и тем же элементом программного обеспечения и/или аппаратными средствами. Использование выражений первый, второй и третий, и так далее, не обозначает никакого порядка. Эти слова должны интерпретироваться как названия.
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия
Способ и система для обработки данных ультразвуковой визуализации
Ультразвуковая система и способ измерения с использованием сдвиговой волны
Наводимая по автокорреляции взаимная корреляция в ультразвуковой эластографии сдвиговой волны
Зонд с ультразвуковым матричным преобразователем для визуализации сдвиговых волн
Микрососудистая контрастная ультразвуковая визуализация путем адаптивной временной обработки

