Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ВЫБОРКИ КВАДРАТОВ ДАЛЬНОСТИ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано преимущественно в наземных радиолокационных станциях (РЛС) кругового и секторного обзора, размеры антенн которых соизмеримы с длиной волны, то есть в РЛС с грубыми измерениями угла места и азимута баллистического объекта (БО). Знание модуля скорости необходимо для расчета баллистической траектории, прогноза точки падения, селекции баллистических ракет от самолетов и решения других задач.
Известны способы, в которых определяют скорости изменения декартовых координат, а модуль скорости вычисляют по формуле:

где  ,
,  ,
,  - скорости изменения декартовых координат x, y, z.
- скорости изменения декартовых координат x, y, z.
Известны устройства определения скорости изменения декартовых координат с помощью цифрового нерекурсивного фильтра (ЦНРФ) путем оптимального взвешенного суммирования фиксированной выборки из N измеренных значений декартовых координат [1, рис. 4.7, с. 303] и с помощью α, β фильтра [1, рис. 4.11, с. 322] или α, β, γ фильтра [2, рис. 9.14, с. 392] путем последовательного оптимального сглаживания выборки измеренных значений декартовых координат нарастающего объема.
Основным недостатком известных устройств является низкая точность определения модуля скорости БО в РЛС с грубыми измерениями угла места и азимута, в частности в РЛС метрового диапазона волн (РЛС МДВ).
Наиболее близким аналогом (прототипом) заявленному изобретению является способ [4] и устройство для его реализации, описанные в патенте №2540323.
В этом способе существенно снижено влияние ошибок измерения угла места и устранено влияние ошибок измерения азимута за счет использования фиксированной выборки квадратов дальности.
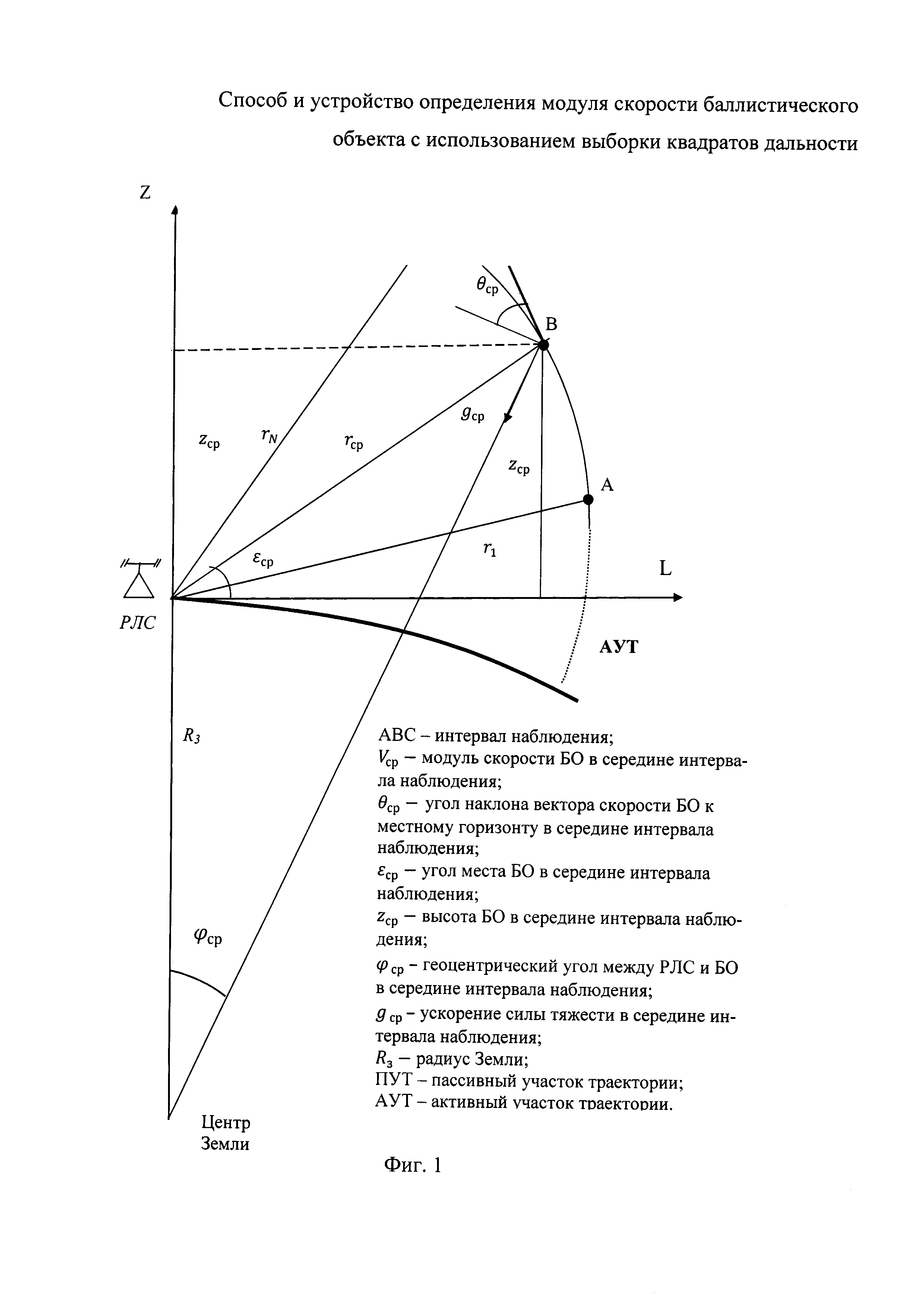
Сущность способа-прототипа заключается в следующем. В РЛС измеряют дальность и угол места БО в цифровом виде. По фиксированной выборке из N измеренных значений высоты определяют оценку  высоты БО в середине интервала наблюдения. Далее вычисляют геоцентрический угол между РЛС и БО (смотри фиг. 1) в середине интервала наблюдения по формуле
высоты БО в середине интервала наблюдения. Далее вычисляют геоцентрический угол между РЛС и БО (смотри фиг. 1) в середине интервала наблюдения по формуле  где rср - дальность до БО в середине интервала наблюдения, Rз - радиус Земли, и ускорение силы тяжести в середине интервала наблюдения по формуле
где rср - дальность до БО в середине интервала наблюдения, Rз - радиус Земли, и ускорение силы тяжести в середине интервала наблюдения по формуле  , где g0 - ускорение силы тяжести на поверхности Земли. Через равные интервалы времени Т0 перемножают оцифрованные сигналы дальности и получают квадраты дальности. По фиксированной выборке из N квадратов дальности определяют оценку второго приращения квадрата дальности
, где g0 - ускорение силы тяжести на поверхности Земли. Через равные интервалы времени Т0 перемножают оцифрованные сигналы дальности и получают квадраты дальности. По фиксированной выборке из N квадратов дальности определяют оценку второго приращения квадрата дальности  . В итоге вычисляют значение модуля скорости БО в середине интервала наблюдения на невозмущенном пассивном участке траектории по формуле
. В итоге вычисляют значение модуля скорости БО в середине интервала наблюдения на невозмущенном пассивном участке траектории по формуле

Схема устройства для реализации способа-прототипа приведена на фиг. 2. Устройство содержит блок 1 преобразования входных сигналов, первый выход которого соединен с входом блока 2 оценивания второго приращения квадрата дальности (ЦНРФ), состоящего из запоминающего устройства 2.1, блока умножителей 2.2, блока весовых коэффициентов оценки второго приращения квадрата дальности 2.3 и сумматора 2.4, выход которого подключен к первому входу вычислителя 3 модуля скорости БО. Второй выход блока 1 соединен с входом блока 4 оценивания высоты БО в середине интервала наблюдения (ЦНРФ), состоящего из запоминающего устройства 4.1, блока умножителей 4.2, блока весовых коэффициентов оценки высоты в середине интервала наблюдения 4.3 и сумматора 4.4, выход которого соединен с 4-м входом вычислителя 3 модуля скорости БО, с 2-м входом вычислителя 5 геоцентрического угла, 1-й вход которого подключен к 3-у выходу блока 1, а также с 1-м входом вычислителя 6 ускорения силы тяжести. Выходы вычислителя 6 ускорения силы тяжести и вычислителя 5 геоцентрического угла соединены с 2-м и 3-м входами вычислителя 3 модуля скорости БО в середине интервала наблюдения, выход которого является выходом заявленного устройства.
ЦНРФ оценивания второго приращения квадрата дальности (блок 2) работает следующим образом. Текущее значение квадрата дальности  умножают на весовой коэффициент в блоке 2.2 и подают на вход сумматора 2.4. Значения квадратов дальности, полученные в предыдущих обзорах
умножают на весовой коэффициент в блоке 2.2 и подают на вход сумматора 2.4. Значения квадратов дальности, полученные в предыдущих обзорах  ,
,  ,…
,… ,
,  , после задержки на соответствующее число периодов обзора в запоминающем устройстве 2.1 умножают в блоке 2.2 на весовые коэффициенты оценки второго приращения, поступающие с блока 2.3 весовых коэффициентов, и подают на вход сумматора 2.4. Весовые коэффициенты оценки второго приращения вычисляют заранее по формуле:
, после задержки на соответствующее число периодов обзора в запоминающем устройстве 2.1 умножают в блоке 2.2 на весовые коэффициенты оценки второго приращения, поступающие с блока 2.3 весовых коэффициентов, и подают на вход сумматора 2.4. Весовые коэффициенты оценки второго приращения вычисляют заранее по формуле:  [3, формула (4.37), с. 155]. В итоге на входе сумматора 2.4 формируется фиксированная выборка из N взвешенных квадратов дальности, а на его выходе получают оценку второго приращения квадрата дальности
[3, формула (4.37), с. 155]. В итоге на входе сумматора 2.4 формируется фиксированная выборка из N взвешенных квадратов дальности, а на его выходе получают оценку второго приращения квадрата дальности  . Эту оценку подают на 1-й вход вычислителя 3 модуля скорости.
. Эту оценку подают на 1-й вход вычислителя 3 модуля скорости.
Таким же образом во втором ЦНРФ (блок 4) определяют оценку высоты  в середине интервала наблюдения. В отличие от блока 2 используют весовые коэффициенты оценки высоты в середине интервала наблюдения, вычисленные по формуле
в середине интервала наблюдения. В отличие от блока 2 используют весовые коэффициенты оценки высоты в середине интервала наблюдения, вычисленные по формуле  Эту оценку подают на 4-й вход вычислителя 3 модуля скорости.
Эту оценку подают на 4-й вход вычислителя 3 модуля скорости.
При высокоточных измерениях дальности ошибки определения модуля скорости БО в РЛС с грубыми измерениями угла места и азимута уменьшаются в несколько раз по сравнению со способом оценивания по выборкам декартовых координат. Однако для решения ряда задач, например определения координат точки падения БО, таких точностей определения модуля скорости может быть недостаточно. Кроме того, в процессе оценивания параметров необходимо хранить большое число предыдущих измерений дальности и высоты (угла места), что при одновременном обслуживании большого числа целей и больших интервалах наблюдения приводит к существенному увеличению емкости запоминающих устройств.
Техническим результатом заявленного изобретения является повышение точности определения модуля скорости БО в наземных РЛС с грубыми измерениями угловых координат при уменьшении объема используемых вычислительных ресурсов.
Указанный технический результат достигается тем, что в способе определения модуля скорости БО с использованием выборки квадратов дальности так же, как в прототипе, измеряют дальность и угол места БО в цифровом виде и определяют высоту zi=risinεi. По выборке из N измеренных значений высоты определяют оценку  высоты БО и среднюю дальность rср до БО в середине интервала наблюдения. Далее вычисляют геоцентрический угол между РЛС и БО в середине интервала наблюдения по формуле
высоты БО и среднюю дальность rср до БО в середине интервала наблюдения. Далее вычисляют геоцентрический угол между РЛС и БО в середине интервала наблюдения по формуле  где rср - дальность до БО в середине интервала наблюдения, Rз - радиус Земли, и ускорение силы тяжести в середине интервала наблюдения по формуле
где rср - дальность до БО в середине интервала наблюдения, Rз - радиус Земли, и ускорение силы тяжести в середине интервала наблюдения по формуле  , где g0 - ускорение силы тяжести на поверхности Земли. Через равные интервалы времени Т0 перемножают оцифрованные сигналы дальности и получают квадраты дальности. По выборке из N квадратов дальности определяют оценку второго приращения квадрата дальности
, где g0 - ускорение силы тяжести на поверхности Земли. Через равные интервалы времени Т0 перемножают оцифрованные сигналы дальности и получают квадраты дальности. По выборке из N квадратов дальности определяют оценку второго приращения квадрата дальности  . В итоге вычисляют значение модуля скорости БО в середине интервала наблюдения на невозмущенном пассивном участке траектории по формуле
. В итоге вычисляют значение модуля скорости БО в середине интервала наблюдения на невозмущенном пассивном участке траектории по формуле

В отличие от прототипа, согласно изобретению, оценку высоты  в середине интервала наблюдения определяют с помощью α, β фильтра. При этом сглаживание измерений высоты производят сначала в прямом по времени направлении до конца интервала наблюдения, а затем в обратном направлении до середины интервала наблюдения. Оценку второго приращения квадрата дальности
в середине интервала наблюдения определяют с помощью α, β фильтра. При этом сглаживание измерений высоты производят сначала в прямом по времени направлении до конца интервала наблюдения, а затем в обратном направлении до середины интервала наблюдения. Оценку второго приращения квадрата дальности  определяют в конце интервала наблюдения с помощью α, β, γ фильтра путем сглаживания значений квадратов дальности.
определяют в конце интервала наблюдения с помощью α, β, γ фильтра путем сглаживания значений квадратов дальности.
Схема устройства определения модуля скорости баллистического объекта заявленным способом приведена на фиг. 3.
Это устройство так же, как прототип, содержит блок 1 преобразования входных сигналов, первый выход которого соединен с входом блока оценивания второго приращения квадрата дальности (блок 2), выход которого подключен к первому входу вычислителя 3 модуля скорости БО. Второй выход блока 1 соединен с входом блока оценивания высоты БО в середине интервала наблюдения (блок 4), выход которого соединен с 4-м входом вычислителя 3 модуля скорости БО, с 2-м входом вычислителя 5 геоцентрического угла, 1-й вход которого подключен к 3-у выходу блока 1, а также с 1-м входом вычислителя 6 ускорения силы тяжести. Выходы вычислителя 6 ускорения силы тяжести и вычислителя 5 геоцентрического угла соединены с 2-м и 3-м входами вычислителя 3 модуля скорости БО в середине интервала наблюдения, выход которого является выходом заявленного устройства.
В отличие от прототипа, согласно изобретению, блок 2 оценивания второго приращения квадрата дальности является α, β, γ фильтром, а блок 4 оценивания высоты БО в середине интервала наблюдения является α, β фильтром. Оба блока построены по известным схемам.
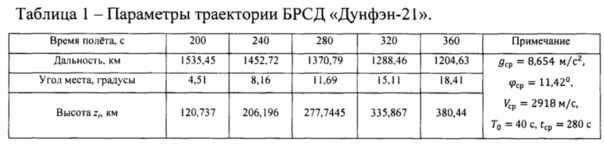
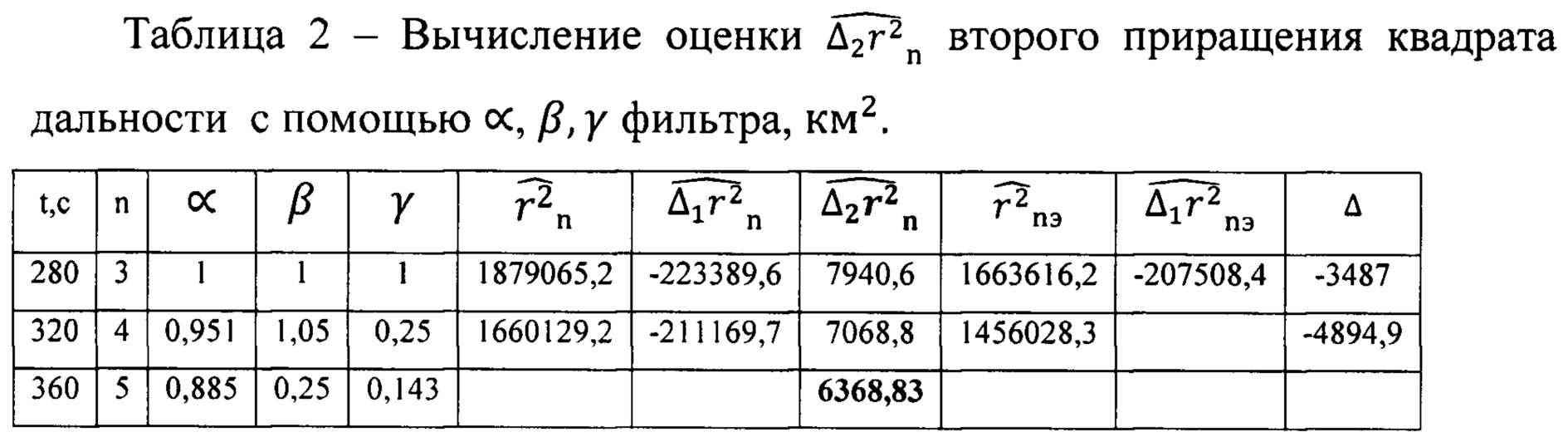
Для доказательства возможности реализации заявленного технического результата вычислим значение модуля скорости на 280-й секунде полета китайской баллистической ракеты средней дальности (БРСД) «Дунфэн-21», траекторные параметры которой приведены в таблице 1.
Оценку второго приращения квадрата дальности  вычислим по следующему алгоритму. Данные вычислений приведены в табл. 2. По трем значениям квадратов дальности (
вычислим по следующему алгоритму. Данные вычислений приведены в табл. 2. По трем значениям квадратов дальности ( ,
,  и
и  ), полученным в первых трех обзорах, определяются начальные значения квадрата дальности (
), полученным в первых трех обзорах, определяются начальные значения квадрата дальности ( ), первого приращения квадрата дальности (
), первого приращения квадрата дальности ( ) и второго приращения квадрата дальности (
) и второго приращения квадрата дальности ( ). Начальные значения коэффициентов усиления фильтра принимаются равными единице (α0=1, β0=1, γ0=1). Далее во всех последующих обзорах (n=4, 5,.. N) коэффициенты усиления вычисляются по формулам
). Начальные значения коэффициентов усиления фильтра принимаются равными единице (α0=1, β0=1, γ0=1). Далее во всех последующих обзорах (n=4, 5,.. N) коэффициенты усиления вычисляются по формулам  ,
,  и
и  где n - номер обзора (столбцы 3-5). Экстраполированное значение квадрата дальности для n-го обзора
где n - номер обзора (столбцы 3-5). Экстраполированное значение квадрата дальности для n-го обзора  вычисляется путем суммирования предыдущих (n-1)-х оценок квадрата дальности
вычисляется путем суммирования предыдущих (n-1)-х оценок квадрата дальности  , первого
, первого  и второго
и второго  приращений квадрата дальности. Экстраполированное значение первого приращения квадрата дальности для n-го обзора
приращений квадрата дальности. Экстраполированное значение первого приращения квадрата дальности для n-го обзора  вычисляется путем суммирования предыдущей (n-1)-й оценки первого приращения квадрата дальности
вычисляется путем суммирования предыдущей (n-1)-й оценки первого приращения квадрата дальности  и удвоенного значения (n-1)-й оценки второго приращения квадрата дальности
и удвоенного значения (n-1)-й оценки второго приращения квадрата дальности  . Затем определяют сигнал ошибки
. Затем определяют сигнал ошибки  между текущим значением квадрата дальности и его экстраполированным значением. Текущая оценка квадрата дальности
между текущим значением квадрата дальности и его экстраполированным значением. Текущая оценка квадрата дальности  вычисляется путем суммирования экстраполированного значения квадрата дальности и взвешенного коэффициентом усиления α сигнала ошибки. Текущую оценку первого приращения квадрата дальности
вычисляется путем суммирования экстраполированного значения квадрата дальности и взвешенного коэффициентом усиления α сигнала ошибки. Текущую оценку первого приращения квадрата дальности  определяют путем суммирования экстраполированного значения первого приращения квадрата дальности и взвешенного коэффициентом усиления β сигнала ошибки. Текущую оценку второго приращения квадрата дальности
определяют путем суммирования экстраполированного значения первого приращения квадрата дальности и взвешенного коэффициентом усиления β сигнала ошибки. Текущую оценку второго приращения квадрата дальности  определяют путем суммирования предыдущей (n-1)-й оценки второго приращения квадрата дальности и взвешенного коэффициентом усиления γ сигнала ошибки. В итоге в N-м обзоре получаем оценку второго приращения квадрата дальности в конце интервала наблюдения
определяют путем суммирования предыдущей (n-1)-й оценки второго приращения квадрата дальности и взвешенного коэффициентом усиления γ сигнала ошибки. В итоге в N-м обзоре получаем оценку второго приращения квадрата дальности в конце интервала наблюдения  .
.
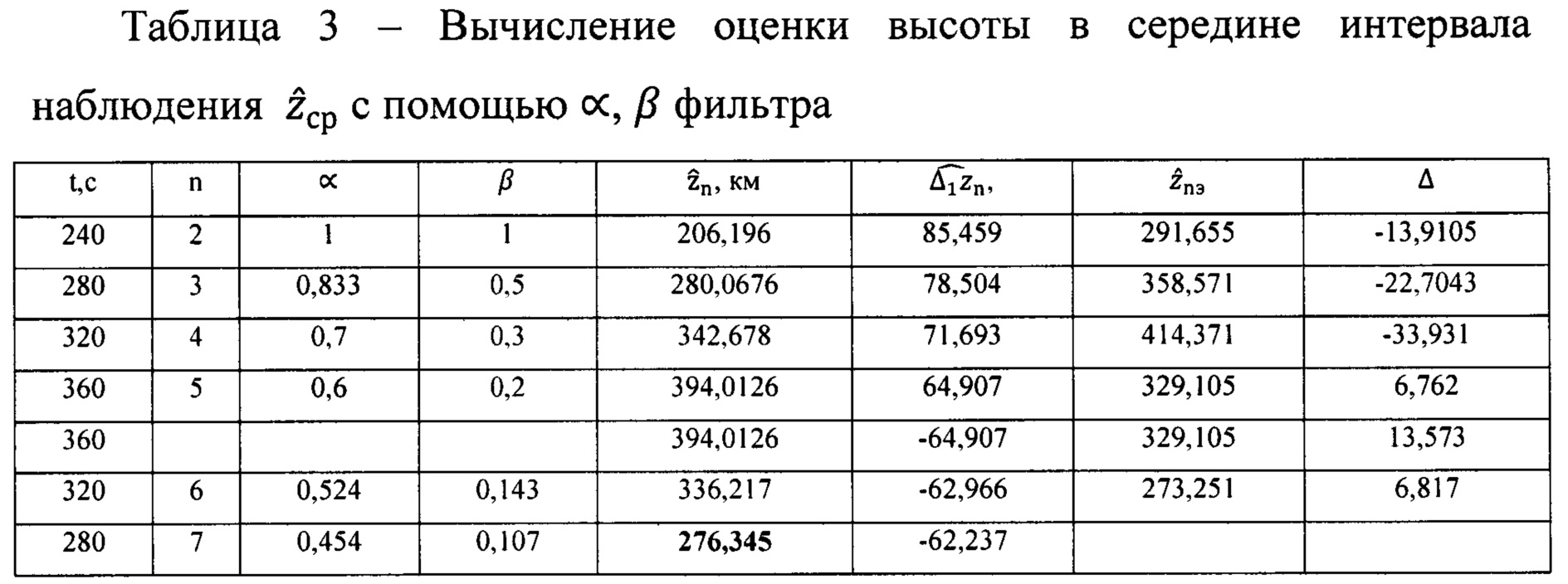
Результаты оценивания высоты в середине интервала наблюдения приведены в табл. 3.
Сначала по первым двум значениям высоты, полученным в первых двух обзорах (z1 и z2), определяются начальные значения высоты ( ) и первого приращения высоты (
) и первого приращения высоты ( ). Затем задаются начальные значения коэффициентов усиления (α0=1, β0=1). Далее во всех последующих обзорах (n=3,
). Затем задаются начальные значения коэффициентов усиления (α0=1, β0=1). Далее во всех последующих обзорах (n=3,  ) значения этих коэффициентов вычисляются по формулам
) значения этих коэффициентов вычисляются по формулам  и
и  . На интервале наблюдения от третьего обзора (n=3) до последнего обзора (n=N) экстраполированное значение высоты для n-го обзора
. На интервале наблюдения от третьего обзора (n=3) до последнего обзора (n=N) экстраполированное значение высоты для n-го обзора  определяют путем суммирования предыдущей (n-1)-й оценки высоты и (n-1)-й оценки первого приращения высоты. Сигнал ошибки
определяют путем суммирования предыдущей (n-1)-й оценки высоты и (n-1)-й оценки первого приращения высоты. Сигнал ошибки  определяют как разность между текущим значением высоты и его экстраполированным значением.
определяют как разность между текущим значением высоты и его экстраполированным значением.
От N-го обзора до ( )-го обзора, произведенного в середине интервала наблюдения, экстраполированное значение высоты для n-го обзора
)-го обзора, произведенного в середине интервала наблюдения, экстраполированное значение высоты для n-го обзора  определяется путем суммирования предыдущей (n-1)-й оценки высоты и инвертированного значения (n-1)-й оценки первого приращения высоты. Сигнал ошибки определяют как разность между текущей оценкой высоты и ее экстраполированным значением. Текущую оценку высоты
определяется путем суммирования предыдущей (n-1)-й оценки высоты и инвертированного значения (n-1)-й оценки первого приращения высоты. Сигнал ошибки определяют как разность между текущей оценкой высоты и ее экстраполированным значением. Текущую оценку высоты  определяют путем суммирования экстраполированного значения высоты и взвешенного коэффициентом усиления α сигнала ошибки. Текущую оценку первого приращения высоты
определяют путем суммирования экстраполированного значения высоты и взвешенного коэффициентом усиления α сигнала ошибки. Текущую оценку первого приращения высоты  определяют путем суммирования (n-1)-й оценки первого приращения высоты и взвешенного коэффициентом усиления β сигнала ошибки.
определяют путем суммирования (n-1)-й оценки первого приращения высоты и взвешенного коэффициентом усиления β сигнала ошибки.
Как видно из таблицы 3, при оценивании высоты в прямом (от 220-й до 360-й с) и в обратном (от 360-й до 280-й с) направлениях практически устраняется смещение оценки высоты  Истинное (табличное) значение равно 277,74 км.
Истинное (табличное) значение равно 277,74 км.
Подставив полученные значения в формулу 2, убедимся, что смещение оценки модуля скорости (методическая ошибка) практически отсутствует:

Если не учитывать поправку на сферичность Земли (RЗsin2ϕcp=249,77 км), то модуль скорости будет определяться с большим отрицательным смещением (-415 м/с). Поэтому смещение оценки до 3 м/с можно считать пренебрежимо малым смещением.
Результаты сравнения случайных среднеквадратических ошибок (СКО) определения модуля скорости в заявленном изобретении, в прототипе и в аналоге приведены в таблице 4. Вычислялись СКО оценивания модуля скорости американской оперативно-тактической ракеты (ОТБР) «Атакмс» на 75-й секунде полета (rср=205 км, εср=15,3°, gср=9,65 м/с2, Vcp=1120 м/с) по данным измерений РЛС МДВ «Небо СВУ» (σr=100 м, σε=1,5°, Т0=5 с) [5, с. 334-336].
СКО оценивания модуля скорости БО вычислялись по следующим формулам:
а) для изобретения и прототипа:

где σr - СКО измерения дальности;
σε - СКО измерения угла места;
б) для изобретения:
 - относительная СКО оценивания координаты в α, β, фильтре [6, таблица 7.3, с. 362];
- относительная СКО оценивания координаты в α, β, фильтре [6, таблица 7.3, с. 362];
 - относительная СКО оценивания второго приращения в α, β, γ фильтре [2, формула 9.6.38, с. 396];
- относительная СКО оценивания второго приращения в α, β, γ фильтре [2, формула 9.6.38, с. 396];
в) для прототипа:
 - относительная СКО оценивания высоты БО в середине интервала наблюдения в ЦНРФ 4;
- относительная СКО оценивания высоты БО в середине интервала наблюдения в ЦНРФ 4;
 - относительная СКО оценивания второго приращения в ЦНРФ 2 [3, формула 4.39, с. 156];
- относительная СКО оценивания второго приращения в ЦНРФ 2 [3, формула 4.39, с. 156];
г) для аналога:

где θср - угол наклона вектора скорости БО к местному горизонту.
Как видно из таблицы 4, при реализации заявленного изобретения в РЛС МДВ «Небо СВУ» обеспечивается повышение точности определения модуля скорости БО по сравнению с прототипом на 40-80 процентов, а по сравнению с аналогами - до пяти раз. Кроме того, существенно уменьшились вычислительные затраты. Так, для оценивания второго приращения квадрата дальности используются только результаты последнего измерения дальности и оценки, полученные в предыдущем обзоре, а не вся фиксированная выборка измерений, как в аналоге и в прототипе.
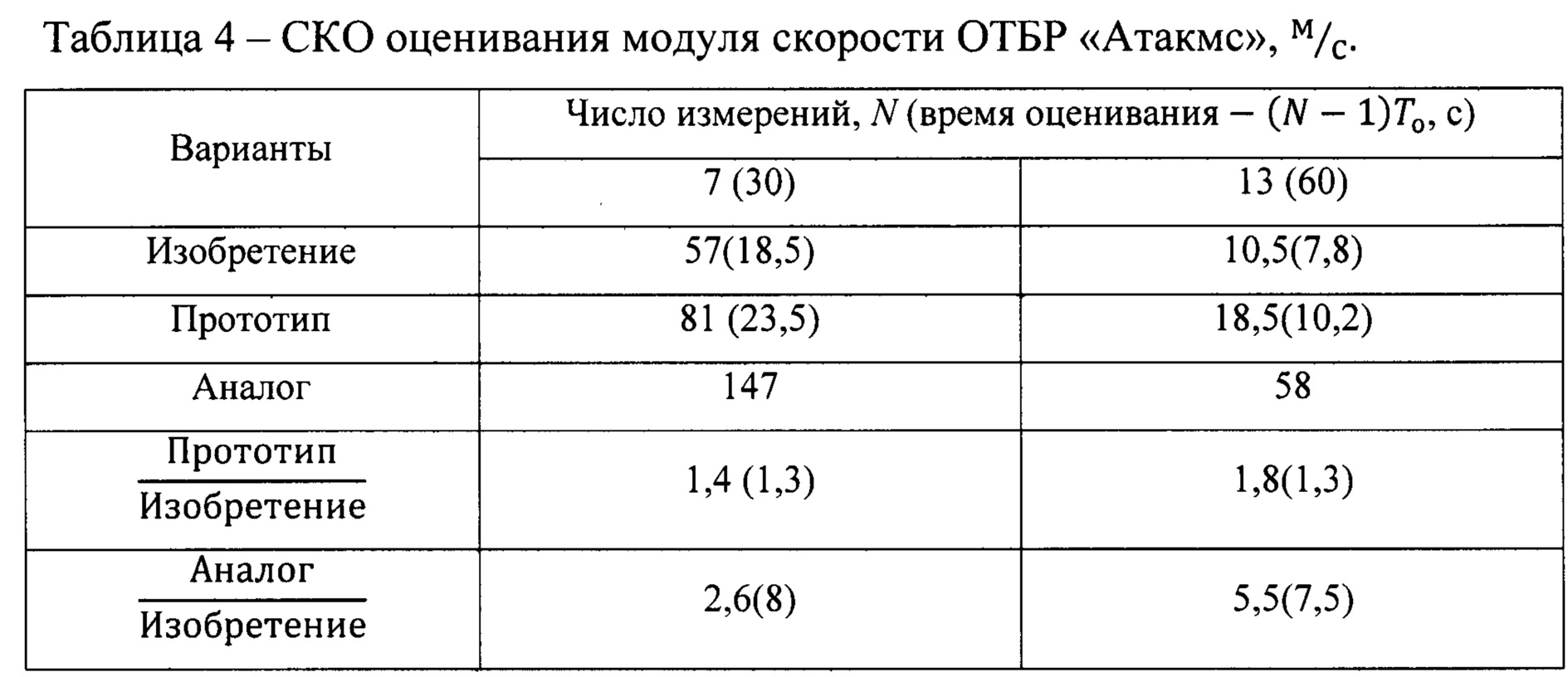
Примечание: в скобках - при ошибках измерения дальности σr=25 м.
Увеличение точности определения модуля скорости заявленным способом, как и способом-прототипом, происходит только при выборе точки оценивания в середине интервала наблюдения, то есть скорость оценивается с запаздыванием по времени на половину длительности интервала наблюдения. При оценивании скорости в реальном режиме времени, то есть в момент получения последнего измерения, преимущества заявленного способа в значительной степени утрачиваются из-за необходимости учета вертикальной скорости БО. Кроме того, заявленный способ нельзя использовать на активном участке траектории, то есть при работающем ракетном двигателе, и при совершении БО маневра на пассивном участке траектории.
Таким образом, доказана реализуемость технического результата заявленного изобретения: повышение точности определения модуля скорости баллистических объектов при грубых измерениях угловых координат и уменьшение объема используемых вычислительных ресурсов.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: «Советское радио», 1967, 400 с.
2. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: «Советское радио», 1974, 432 с.
3. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М.: «Советское радио», 1986, 352 с.
4. Патент №2540323. Способ определения модуля скорости баллистической цели в наземной радиолокационной станции.
5. Вооружение ПВО и РЭС России. Альманах. М.: Издательство НО «Лига содействия оборонным предприятиям», 2011, 504 с.
6. Справочник по радиолокации / Под ред. М.И. Сколника. Книга 1. М.: «Техносфера», 2015, 672 с.








Наземный радиолокационный обнаружитель
Способ изготовления пластинчатого щелевого теплообменника
Обзорная наземно-космическая рлс
Многодиапазонный радиолокационный комплекс
Полипептид актинии, обладающий анальгетическим действием
Полипептид актинии, обладающий анальгетическим действием
Устройство первичной обработки сигналов радиолокационной станции, использующей две последовательности зондирующих импульсов
Амплитудный одноканальный многочастотный пеленгатор шумовых активных помех
Система автономного электропитания арочного металлообнаружителя, выполненная на основе фотоэлектрической станции
Мобильная антенная установка
Устройство снижения светопрозрачности решётчатого заграждения
Способ получения лигнана, обладающего анальгетическим действием
Устройство теплохладоснабжения

