Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области инерциальной навигации и может использоваться для определения текущих угловых и линейных ускорений объекта. Устройство может применяться как автономно, так и в сочетании со спутниковыми радионавигационными системами GPS и ГЛОНАСС.
Известен способ инерциальной навигации RU №2107897 С1, 27.03.1998. Данный способ предназначен для определения текущих значений координат движущегося объекта и позволяет определить угловой дрейф отсчетной системы координат навигационной системы. В рамках данного способа навигационная система работает по эталонной модели. Вычисляют выходные параметры навигационной системы по эталонной модели, а также вычисляют соответствующие им входные сигналы с акселерометров для эталонной модели, в которой разворачивают отсчетную систему координат на фиксированные углы относительно отсчетной системы координат навигационной системы. Вычисляют сигналы с акселерометров, получаемые путем перепроектирования сигналов с акселерометров навигационной системы на развернутую на те же фиксированные углы систему координат эталонной модели. Затем по значениям вычисленных сигналов определяют угловой дрейф отсчетной системы координат навигационной системы.
Недостатком способа является сложность его аппаратной реализации в связи с необходимостью в хранении параметров и расчете эталонной модели.
Известен способ инерциальной навигации, принятый за прототип (см. RU №2483279 С1, 27.05.2013), заключающийся в том, что первые 6 используемых акселерометров имеют следующие координаты  и ориентацию
и ориентацию  :
:


в связанной системе координат, где r - расстояние от точки установки акселерометра до центра системы координат.
Вторые шесть акселерометров имеют следующие координаты  и ориентацию
и ориентацию  :
:

в связанной системе координат, а ориентация их чувствительных осей задана в связанной системе координат как

Показания 12 акселерометров используются для расчета вектора базовых навигационных переменных:

где FX, FY, FZ - составляющие «кажущегося» ускорения (включающего воздействие гравитации),  - составляющие углового ускорения, WX,WY,WZ - составляющие угловой скорости.
- составляющие углового ускорения, WX,WY,WZ - составляющие угловой скорости.
На основе значений угловой скорости рассчитывается угловая ориентация объекта:

Расчет ускорений в связанной системе координат производится на основе значений составляющих угловой скорости и данных, снимаемых с акселерометров.
Ускорения в Земной системе координат определяются путем перевода ускорения из связанной в Земную систему координат с учетом угловой ориентации объекта и вектора гравитации.
Расчет линейной скорости и координат объекта производится путем однократного и 2-кратного интегрирования ускорений в Земной системе координат.
Недостатками данного способа являются большое количество требуемых акселерометров, а также вычислительно сложная процедура расчета, затрудняющая получение результатов измерений в реальном масштабе времени.
Известна бесплатформенная инерциальная система RU №2337316 С1, 27.10.2000. Система содержит блок выработки навигационных параметров, центральный прибор с тремя акселерометрами и с тремя датчиками абсолютной угловой скорости, блок вычисления погрешностей и шесть вычитающих устройств. Задачей изобретения является уменьшение погрешностей бесплатформенной инерциальной системы, обусловленных реакцией каждого датчика абсолютной угловой скорости на угловые скорости по перекрестным (перпендикулярным к измерительной) осям и линейные ускорения как по измерительной, так и по перекрестным осям.
Недостатком изобретения является применение датчиков абсолютной угловой скорости наряду с акселерометрами, что усложняет схемотехническую реализацию и увеличивает габариты системы.
Наиболее близким аналогом предлагаемой системы и принятым в качестве прототипа является безгироскопная инерциальная навигационная система RU 2483279 С1, 27.05.2013, которая включает модуль первых шести акселерометров, модуль вторых шести акселерометров, блок расчета коэффициентов матрицы координатных преобразований, блок расчета ускорений в связанной системе координат, блок расчета ускорений в Земной системе координат, блок расчета навигационных параметров, блок расчета составляющих угловой скорости.
Определение навигационных параметров объекта (текущих координат и угловой ориентации) с помощью данного устройства выполняется с использованием способа, основанного на формулах (1) - (6).
Недостатками прототипа являются отсутствие описания технологии изготовления и характеристик акселерометров, а также отсутствие возможности определения угловых ускорений.
Общий недостаток известных систем состоит в том, что в этих системах используются акселерометры типа MEMS, сделанные из кремния. Кремниевые акселерометры обладают довольно большими погрешностями, вызванными изменением температуры, нелинейностью и гистерезисом. В связи с тем, что для определения перемещений объекта в этих системах производится интегрирование показаний акселерометров, содержащих вместе с полезным сигналом указанные погрешности, то суммарные ошибки системы возрастают со временем.
Техническим результатом способа является существенное повышение точности и скорости измерения параметров движения объекта.
Технический результат способа достигается тем, что продольную, поперечную и вертикальную оси рамы крепления измерительной системы устанавливают совпадающими с осями объекта измерений. Причем начало координат располагают в центре масс объекта, носовую и хвостовую торцевые пластины рамы системы устанавливают соответственно на расстояниях Δx и -Δx от центра рамы крепления параллельно плоскости YZ.
На носовой торцевой пластине рамы системы устанавливают акселерометры следующим образом:
- в точке с координатами Δy, Δz устанавливают акселерометры 1, 2, 3, которые чувствительны к ускорениям в направлениях X, Y, Z соответственно;
- в точке с координатами -Δy, Δz устанавливают акселерометры 4, 5, которые чувствительны к ускорениям в направлениях X, Z соответственно;
- в точке с координатами 0, -Δz устанавливают акселерометр 6, который чувствителен к ускорениям в направлении Y.
На хвостовой торцевой пластине рамы системы устанавливают акселерометры следующим образом:
- в точке с координатами Δy, Δz устанавливают акселерометры 7, 8, 9, которые чувствительны к ускорениям в направлениях X, Y, Z соответственно;
- подают питание 100 Вольт постоянного тока на тензорезисторные мосты всех акселерометров;
- с помощью аналогоцифрового преобразователя с быстродействием не менее 10000 отсчетов/с и разрядностью не менее 24 разрядов измеряют сигналы U1, … ,U9 с выхода каждого акселерометра;
- для каждого заданного момента времени производят вычисление угловых εx, εy, εz и линейных ах, ау, az ускорений центра масс объекта с учетом выходных сигналов девяти акселерометров.
Техническим результатом системы является повышение точности измерения параметров движения объекта при одновременном расширении диапазона рабочих температур.
Технический результат системы достигается тем, что в ней содержится 9 акселерометров, каждый из которых выполнен в виде упругого элемента, состоящего из двух балок-пластин из нержавеющей стали. На одну из сторон каждой балки-пластины поверх тонкого слоя электроизоляции нанесены вакуумным напылением четыре тонкопленочных тензорезистора из нихрома, объединенные в тензорезисторный мост. На свободном конце упругого элемента закреплена инерционная масса. Форма в плане балки-пластины выбрана так, что обеспечивается ее S-образный изгиб под действием инерционной массы. Основание упругого элемента закреплено на раме крепления, общей для всех акселерометров.
Тонкопленочные тензорезисторы состоят из последовательно соединенных параллельных резистивных полос шириной менее 10 микрон, расстояние между которыми не более 5 микрон, при этом суммарное электрическое сопротивление тензорезистора не менее 125 кОм.
Рама крепления имеет коробчатую конструкцию в форме прямоугольного параллелепипеда с двумя жесткими на изгиб торцевыми пластинами, на которых установлены акселерометры.
Краткое описание чертежей
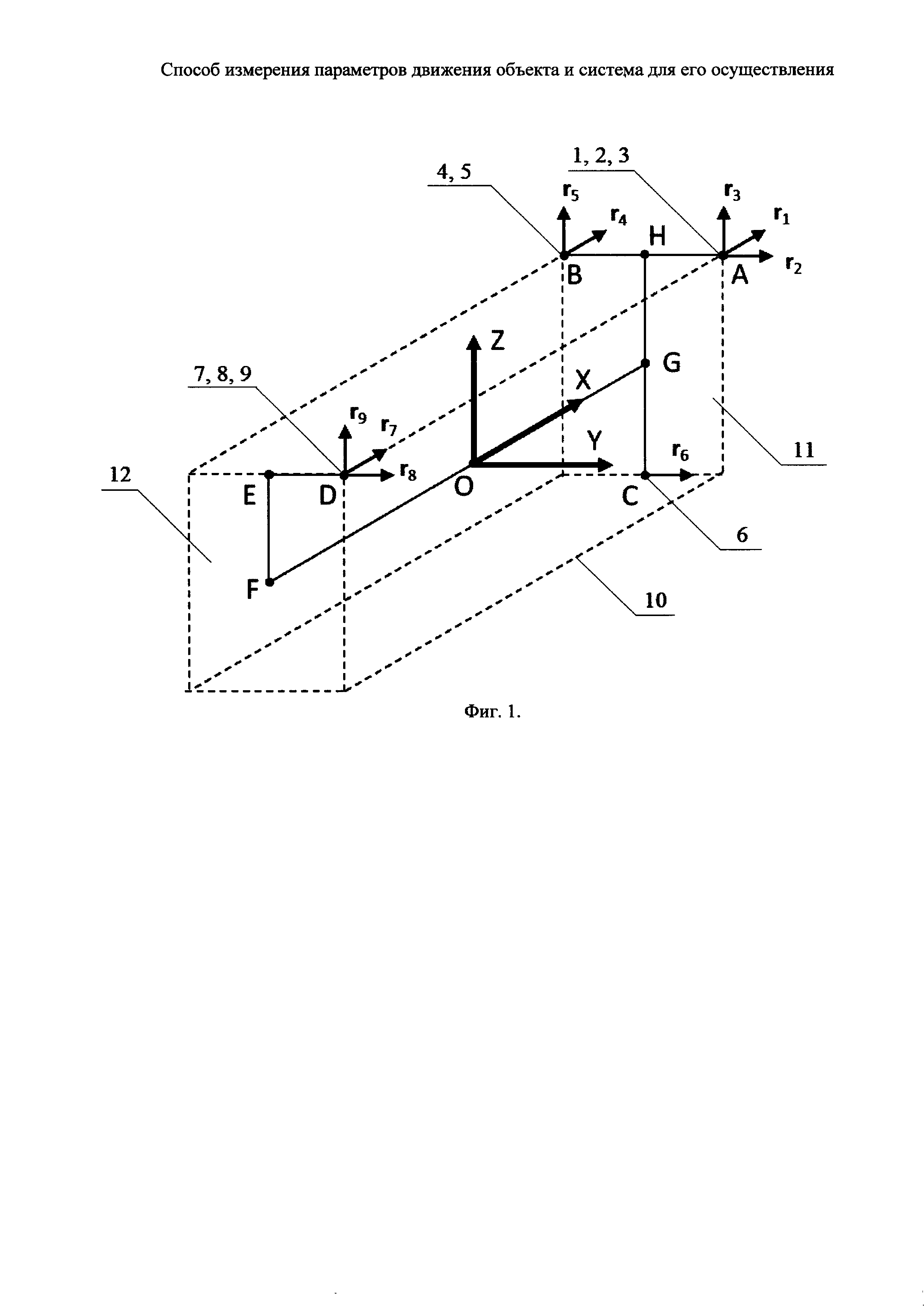
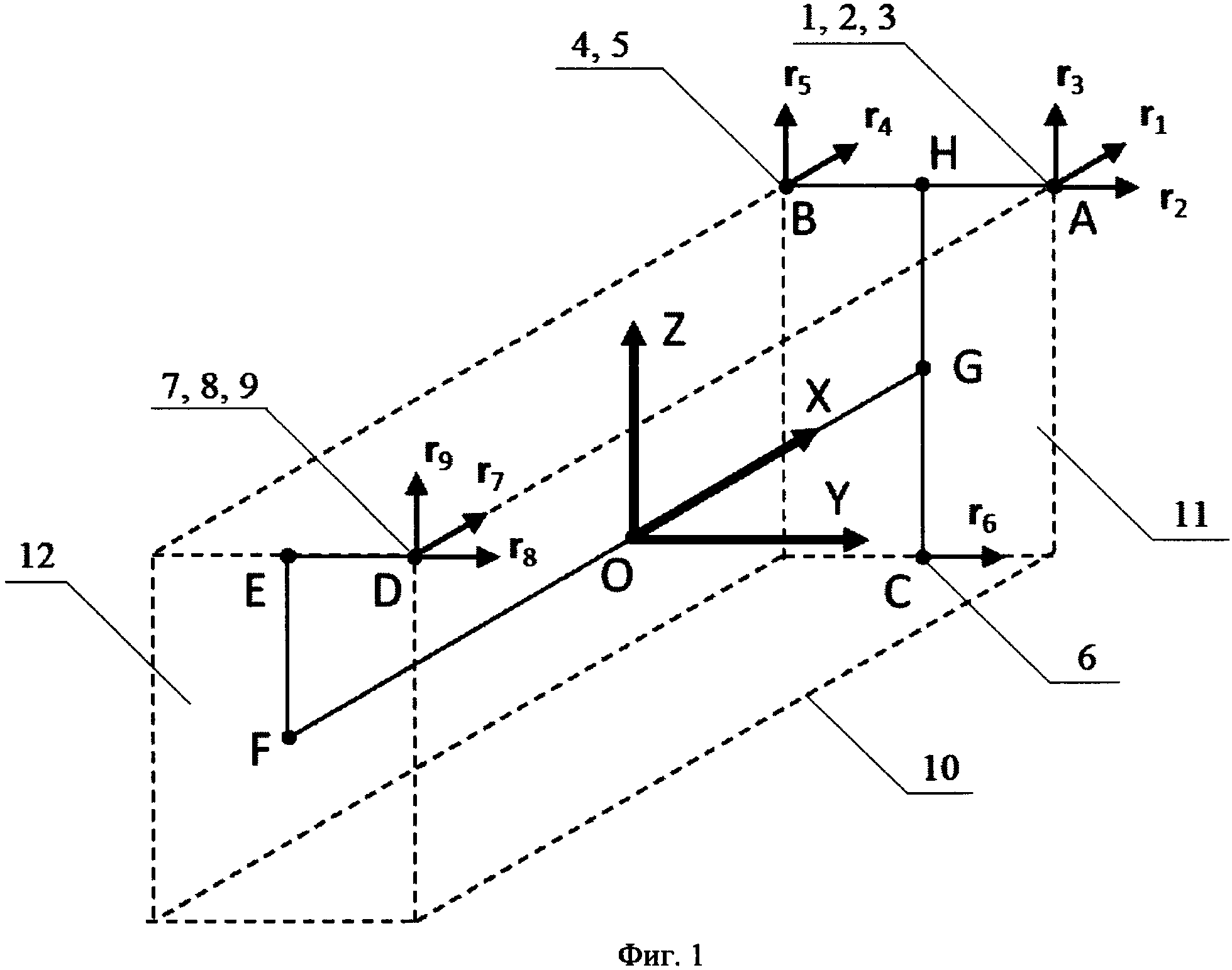
На фиг. 1 представлена схема расположения 9 акселерометров.
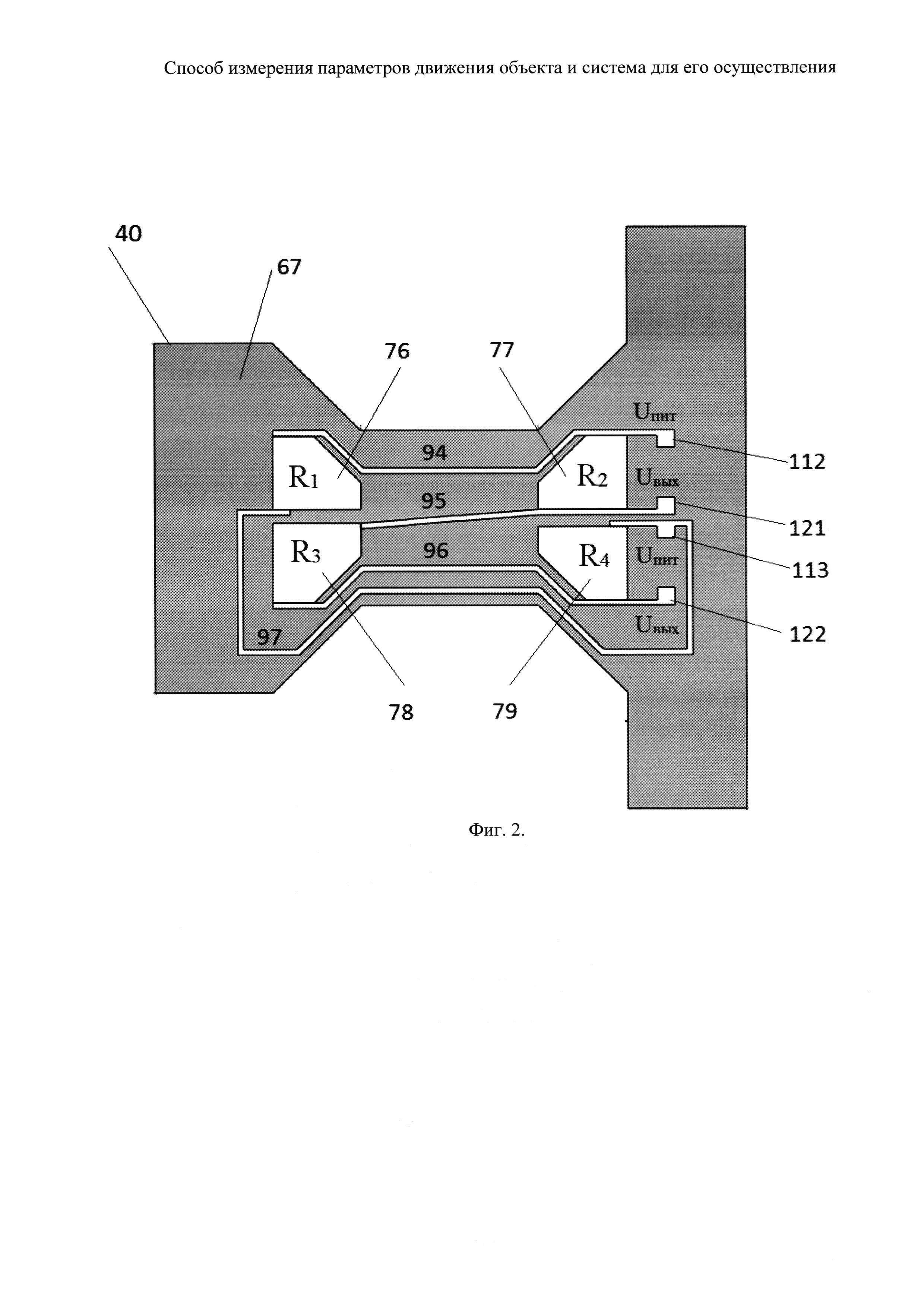
На фиг. 2 представлен вид сверху на балку-пластину в составе экспериментального упругого элемента для акселерометра.
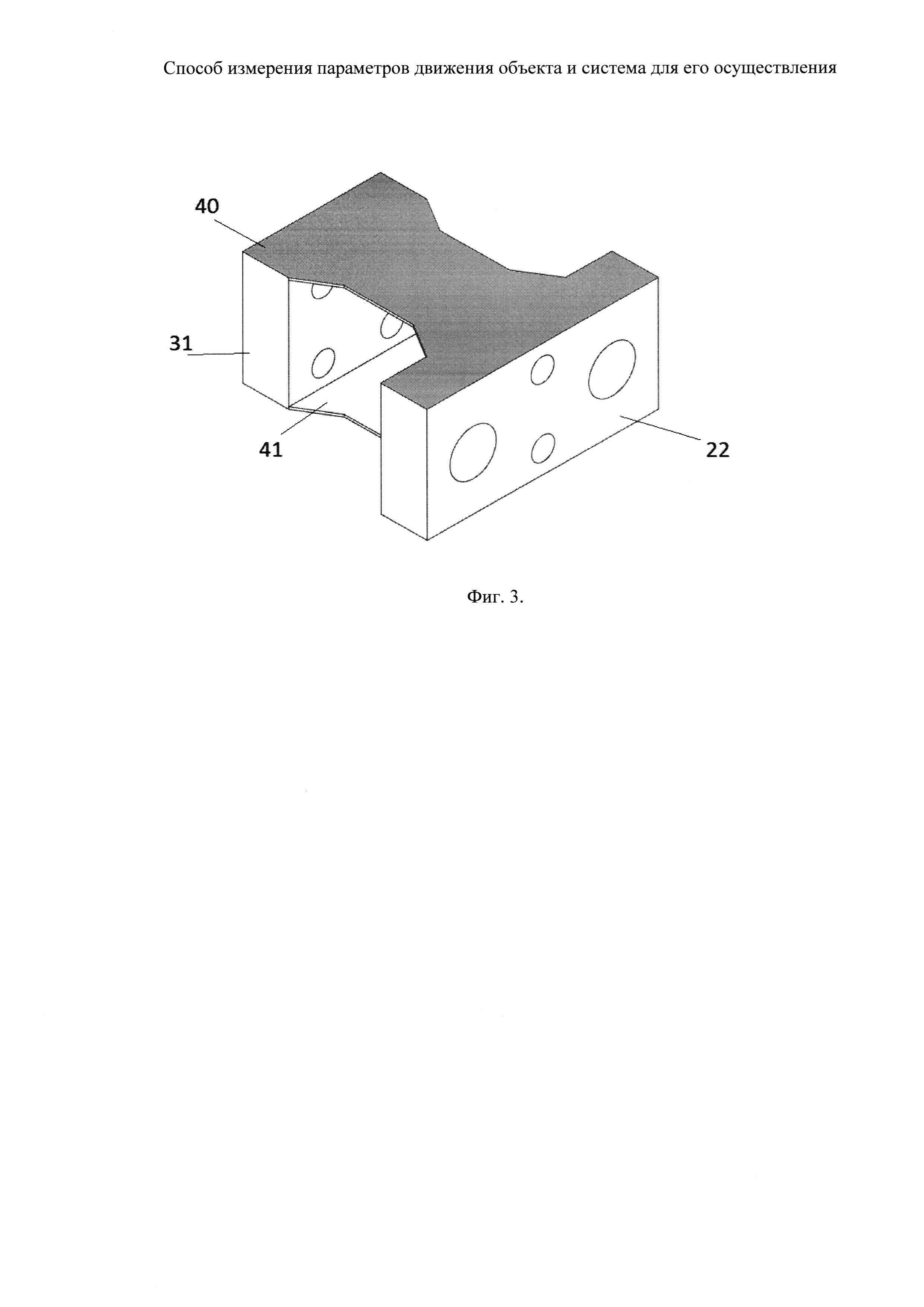
На фиг. 3 представлена аксонометрия экспериментального упругого элемента для акселерометра.
Сутью данного изобретения является высокоточное определение линейных и угловых ускорений объекта.
Рама крепления измерительной системы 10 имеет коробчатую конструкцию в форме прямоугольного параллелепипеда с двумя жесткими на изгиб торцевыми пластинами, на которых установлены акселерометры.
На фиг. 1 представлена схема бортовой автономной системы для измерения положения движущегося объекта, которая включает 9 тензометрических акселерометров, расположенных на раме крепления 10 в точках А, В, С, D. Акселерометры закреплены в носовой торцевой пластине 11 и хвостовой торцевой пластине 12, которые перпендикулярны продольной оси объекта. Направления чувствительных осей акселерометров 1-9 совпадают с векторами r1, … , r9, соответственно.
В точке А расположены акселерометры 1-3, измеряющие линейные ускорения вдоль трех осей. В точке В расположены акселерометры 4, 5, измеряющие линейные ускорения вдоль осей x, z. В точке С расположен акселерометр 6, измеряющий линейное ускорение вдоль оси y. В точке D расположены акселерометры 7-9, измеряющие линейные ускорения вдоль трех осей.
Каждый из этих акселерометров испытывает влияние одного линейного и двух угловых ускорений. Для определения трех линейных и трех угловых ускорений, соответствующих определенному моменту времени, можно использовать систему из 9 алгебраических уравнений. Измеренное акселерометром суммарное значение ускорения обозначим Ui, где i = 1, …, 9 - номер акселерометра, действующего, соответственно, вдоль направления ri, согласно фиг. 1.
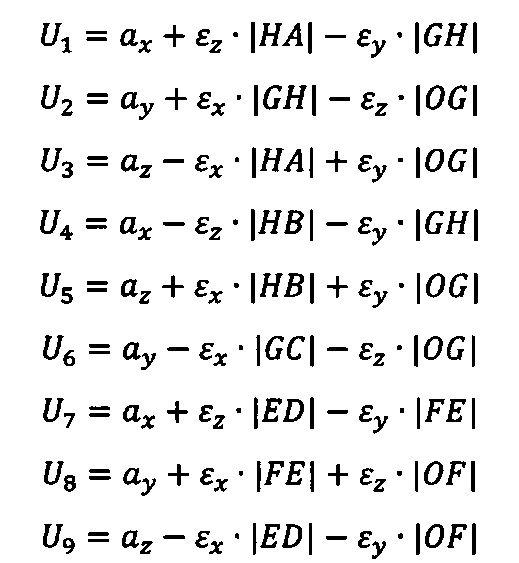
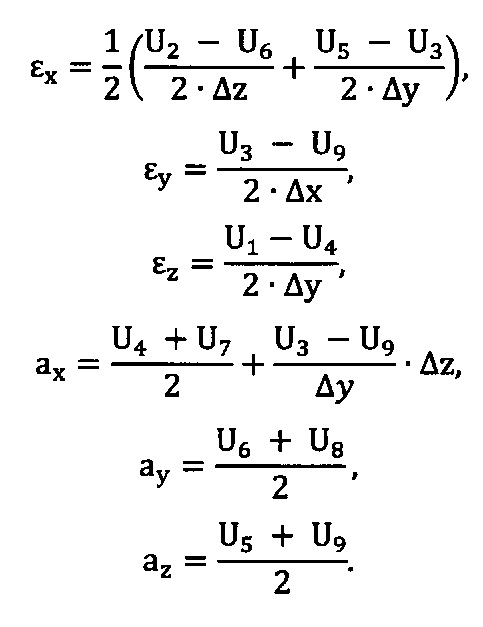
Допустим, что ⎜OF⎪ = ⎜OG⎪ = Δx, ⎜GH⎪ = ⎜GC⎪ = ⎜FE⎪ = Δz, ⎜HA⎪ = ⎜HB⎪ = ⎜ED⎪ = Δy. Тогда приведенную систему уравнений нетрудно преобразовать так, что неизвестные выражаются в явной форме и вычисления ускорений центра масс объекта не потребуют существенных ресурсов бортового компьютера:
Для повышения точности измерения ускорений предлагается использовать технологию изготовления акселерометров, при которой величины ускорений определяются разностью напряжений на измерительных контактных площадках 121-129 высокоомных тензорезисторных мостов 58-66 с напряжением 100 В на контактных площадках питания 112-120. При этом балка-пластина 40-57, на которой располагается тензорезисторный мост 58-66, под нагрузкой, вызванной измеряемым ускорением, изгибается, приобретая S-образную форму, что обеспечивает разные знаки для деформаций тонкопленочных тензорезисторов 76-93.
С помощью быстродействующего (не менее 10000 отсчетов/с) и высокоразрядного (24 разряда) аналого-цифрового преобразователя 120-138 измеряются сигналы U1, …, U9 (суммарные значения ускорений) с выхода каждого акселерометра в состоянии покоя и в процессе движения объекта.
На основе полученных значений формируется система из 9 алгебраических уравнений для определения трех линейных ускорений ах, ay, az и трех угловых ускорений εx, εy, εz центра масс объекта в каждый момент времени. При этом избыточность числа уравнений относительно числа искомых переменных позволяет обеспечить коррекцию ошибки измерения сигналов U1, …, U9.
Таким образом, система с меньшим количеством акселерометров по сравнению с прототипом, а также соответствующий выбор координат установки акселерометров и их чувствительных осей обеспечивают высокоточное определение линейных и угловых ускорений объекта.
Каждый акселерометр 1-9 состоит из упругого элемента 13-21, слоя электроизоляции 67-75 и тензорезистивного моста 58-66.
Упругий элемент состоит из основания 22-30, концевого элемента 31-39 и балки-пластины 40-57.
Тензорезисторный мост 58-66 в составе каждого упругого элемента 13-21 состоит из четырех тонкопленочных металлических проводников 94-111, двух контактных площадок питания 112-120, двух контактных измерительных площадок 121-129 и четырех тонкопленочных металлических тензорезисторов 76-93, допускающих напряжение питания Uпит = 100 В, что обеспечивает величину выходного сигнала Uвых = 210 мВ при стандартной относительной деформации 0,001.
Тонкопленочный тензорезистор изготавливается из сплава Нихром (Ni80Cr20) методом магнетронного распыления в вакууме. Решетка тензорезистора состоит из параллельных резистивных полос шириной 10 микрон каждая. Толщина полос 0,1 микрона. Длина полосы изменяется от 0,5 до 1 мм. Расстояние между двумя смежными полосами 5 микрон. Суммарное электрическое сопротивление тензорезистора 125,5 кОм. При напряжении питания моста 100 Вольт ток, проходящий через тензорезистор, равен 0,4 мА, рассеиваемая мощность 40 мВт. Традиционные металлические тензорезисторы имеют токи от 10 до 30 мА и величину рассеиваемой мощности от 100 до 300 мВт. То есть описанный выше тонкопленочный тензорезистор имеет гораздо более комфортные условия для работы.
На фиг. 2 показан вид сверху на экспериментальный упругий элемент 13 в составе акселерометра 1, на котором размещаются тонкопленочные тензорезисторы 76-79. На фиг. 3 представлена аксонометрия упругого элемента 13.
Поскольку упругие элементы 13-21 выполнены по единой технологии, рассмотрим более подробно лишь один из них. Так, упругий элемент 13 состоит из двух балок-пластин 40, 41 переменной ширины, толщиной h, которые изготовлены из одного куска материала вместе с основанием 22 (с размерами 2×5×10 мм) и с концевым элементом 31 (2×5×6 мм). Основание упругого элемента имеет крепежные отверстия с резьбой (М2 и M1). Концевой элемент имеет отверстия с резьбой M1 для крепления заданной массы, которая под действием измеряемого ускорения нагружает упругий элемент инерционной силой в направлении, перпендикулярном к плоскостям балок-пластин.
Балки-пластины упругого элемента испытывают S-образный изгиб, характерный тем, что относительные деформации балки вблизи основания и вблизи концевого элемента имеют противоположный знак. Если на одном конце рассматриваемой поверхности балки происходит растяжение, то на противоположном конце наблюдается сжатие, и наоборот. Балки-пластины имеют переменную ширину вблизи концов, выбранную так, что на участке длиной  = 1,5 мм относительная деформация постоянна. Это дает возможность обеспечить равномерную работу всех полос описанного выше тонкопленочного тензорезистора, максимизировать выходной сигнал и снизить погрешности измерений за счет того, что все четыре тензорезистора R1, R2, R3, R4 работают в одинаковых условиях.
= 1,5 мм относительная деформация постоянна. Это дает возможность обеспечить равномерную работу всех полос описанного выше тонкопленочного тензорезистора, максимизировать выходной сигнал и снизить погрешности измерений за счет того, что все четыре тензорезистора R1, R2, R3, R4 работают в одинаковых условиях.
Указанные четыре тензорезистора R1, R2, R3, R4 соединены в мостовую схему с помощью тонкопленочных металлических проводников 94-97. На поверхности балки-пластины нанесены также контактные площадки питания 112, 113 мостовой схемы и контактные площадки измерения 121, 122 выходного сигнала. Вакуумная депозиция материалов тензорезисторов 76-79, металлических проводников 94-97 и контактных площадок 112, 113, 121, 122 должна производиться на поверхность материала, обладающего очень хорошими электроизоляционными характеристиками. Таким материалом является механически обрабатываемая керамика: нитрид алюминия Shapal-M. Однако этот материал имеет сравнительно низкий коэффициент температурного расширения, что может вызвать нежелательно высокие температурные напряжения в материале металлического тензорезистора. Более подходящим представляется вариант изготовления упругого элемента из нержавеющей стали ARMCO, которая в каталогах поставщиков Goodfellow имеет обозначение 17-7РН (Fe/Cr17/Ni7).
Для обеспечения электроизоляции на поверхность стального упругого элемента наносили методом вакуумной депозиции тонкий слой электроизоляции 67 из окиси кремния SiO, который обеспечил электрическое сопротивление изоляции 9 Гига Ом при напряжении 100 Вольт и сохранение прочности изоляции до напряжения 5000 Вольт.
В составе датчика давления упругий элемент с покрытием из SiO выдержал 10000 циклов нагружений при изменении относительной деформации в пределах от -0,001 до +0,001 при одновременном циклическом изменении температуры от -40 до +120°С. Разница в коэффициентах температурного расширения материала тензорезистора (нихрома) и стали АРМКО составляет всего лишь  Диапазон рабочих температур акселерометра с описанным упругим элементом и тензорезисторами из нихрома может достигать 340°С без потери точности.
Диапазон рабочих температур акселерометра с описанным упругим элементом и тензорезисторами из нихрома может достигать 340°С без потери точности.
Размеры упругого элемента могут быть существенно уменьшены без снижения его основных характеристик. Рассмотрим следующий вариант размеров в плане для прототипов акселерометров с пределами измерений ±2g; ±4g; ±8g.
Размеры  и L уменьшим до 0,5 мм. Уменьшим также ширину полос тензорезисторной решетки до 5 микрон для того, чтобы получить электрическое сопротивление тензорезистивного моста 80 кОм. Толщину балки-пластины уменьшим до 50 микрон, что можно достигнуть шлифованием внешних поверхностей упругого элемента. Размеры по ширине балки-пластины оставим без изменения: Bmin = 3 мм; Bmax = 6 мм. Размер по толщине упругого элемента может быть уменшен до 2 мм. Ниже приведены расчетные характеристики собственных частот колебаний и потребных величин инерционных масс для прототипов акселерометров.
и L уменьшим до 0,5 мм. Уменьшим также ширину полос тензорезисторной решетки до 5 микрон для того, чтобы получить электрическое сопротивление тензорезистивного моста 80 кОм. Толщину балки-пластины уменьшим до 50 микрон, что можно достигнуть шлифованием внешних поверхностей упругого элемента. Размеры по ширине балки-пластины оставим без изменения: Bmin = 3 мм; Bmax = 6 мм. Размер по толщине упругого элемента может быть уменшен до 2 мм. Ниже приведены расчетные характеристики собственных частот колебаний и потребных величин инерционных масс для прототипов акселерометров.

Эти акселерометры имеют одинаковую форму в плане и одинаковую схему моста из тонкопленочных металлических тензорезисторов. Используя экспериментальные данные и данные фирмы Strain Measurement Devices Ltd для тонкопленочных тензорезисторов из нихрома, можно прогнозировать следующие характеристики акселерометров.
Основная погрешность измерений: менее 0,02%.
Погрешность повторяемости: менее 0,01%.
Температурный коэффициент чувствительности: менее 0,002%/К
При напряжении питания 100 Вольт и сопротивлении моста 80 кОм максимальное значение измеряемого сигнала, соответствующее диапазону измеряемого ускорения, равно 210 мВ для всех трех рассматриваемых прототипов акселерометров. Разрешающая способность этих акселерометров указана ниже.

По сравнению с известным акселерометром фирмы Analog Devices ADXL213, который имеет диапазон измерений ±1,2g; разрешающую способность 1⋅10-3g и погрешность измерений 0,5%, предлагаемые акселерометры обладают существенно лучшими характеристиками по точности и разрешающей способности. Весьма важным преимуществом предлагаемых акселерометров является то, что они могут работать в условиях повышенных температур до 340°С.
Применение описанного изобретения дает возможность повысить точность, разрешающую способность и стабильность определения ускорений объекта при одновременном расширении диапазона рабочих температур за счет сочетания предложенной технологии изготовления тензорезисторных акселерометров, способа их взаимного расположения и процедуры расчета.
Данная заявка на изобретение подготовлена при поддержке РФФИ, номер проекта 16-29-04326 офи_м.
Способ преобразования энергии ветра в полезную энергию
Устройство формирования переноса в сумматоре
Малогабаритный музыкальный фонтан
Устройство для измерения свойства диэлектрического материала
Бесконтактное радиоволновое устройство для измерения толщины диэлектрических материалов
Способ измерения вектора гармонического сигнала
Способ позиционного управления газовой турбиной
Объемный расходомер
Способ измерения расхода среды
Устройство для измерения количества вещества в металлической емкости
Способ и устройство гибридной коммутации цифровых каналов связи, генератор сетевого трафика и модуль идентификации
Устройство для моделирования двухканальных преобразователей
Устройство для автоматической идентификации и коррекции состояния больных сахарным диабетом
Способ преобразования энергии ветровых и энергетических потоков воздуха на средних высотах в тропосфере и устройство для его осуществления
Способ экспериментальных исследований аэромеханики и динамики полёта беспилотных летательных аппаратов и устройство для его осуществления

