Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ СОБСТВЕННОГО ВРАЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано в системах управления ориентацией космических аппаратов (КА).
Известны способы определения относительной угловой скорости КА при колебательном процессе управления ориентацией объекта на подвижный ориентир, позволяющие определить относительную угловую скорость движения КА вокруг его центра масс (ЦМ) по отношению к подвижному ориентиру (авторские свидетельства СССР №1819831 от 1990 г., №1819832 от 1990 г., патент RU №2396188 от 2009 г.).
Способ, изложенный в авторском свидетельстве №1819831, заключается в том, что относительную угловую скорость КА определяют по информации о скорости вращения маховиков электромаховичных двигателей (ЭДМ) в момент достижения угловым отклонением ориентируемой оси от направления на ориентир экстремального значения (авторское свидетельство СССР №1819831, 1990 г., МПК B64G 1/24).
Недостатком данного способа является невозможность его применения в режимах сохранения живучести КА ввиду непригодности использования ЭДМ в этом режиме (режимы обеспечения живучести КА традиционно осуществляются с помощью реактивных двигателей ввиду ограниченности энергоресурсов в данных режимах).
Способ, изложенный в авторском свидетельстве №1819832, заключается в том, что относительную угловую скорость определяют как разность измеренной текущей абсолютной угловой скорости и угловой скорости, запомненной на момент достижения угловым отклонением ориентируемой оси от направления на ориентир экстремального значения (авторское свидетельство СССР №1819832, 1990 г., МПК B64G 1/24).
Недостатком данного способа является невозможность определить собственную угловую скорость вращения КА вокруг своего центра масс без использования устройств измерения скорости.
В качестве прототипа выбран способ, изложенный в патенте RU №2396188, состоящий в том, что в течение интервала времени Δ не менее двух раз определяют проекции на связанные оси космического аппарата (OXKA, OYKA, OZKA) единичного вектора, направленного из центра масс на звезду, по формулам:

где:
βПОС - проекция на ось OXKA единичного вектора направления на звезду;
αПОС - проекция на ось OZKA единичного вектора направления на звезду;
γКА - проекция на ось OYKA единичного вектора направления на звезду;
α, и β - результаты измерения текущего направления на звезду, например, Солнце;
ХПОС - максимальная величина β, измеряемая прибором ориентации на Солнце по оси OXKA;
ZПОС - максимальная величина α, измеряемая указанным прибором по оси OZKA, рассчитывают углы ϕКА(t), ψКА(t), θKA(t) между проекциями единичного вектора на плоскости связанных с КА осей и этими осями по формулам:

рассчитывают разность величин этих углов на интервале времени Δ и в результате деления их на величину Δ определяют значения и знаки проекций ωx, ωу, ωz вектора собственной средней угловой скорости (ωКА) космического аппарата на его связанные оси ОХКА, OYKA, OZKA.
Техническим результатом известного способа является возможность определения вектора угловой скорости собственного вращения КА по результатам измерения направления на Солнце или другие звезды в связанной системе координат (патент RU №2396188, 2009 г., МПК B64G 1/24).
К недостаткам данного способа можно отнести невозможность определения собственной угловой скорости вращения КА вокруг направления на Солнце или другие звезды, использование высокоресурсных математических функций (например, тригонометрические функции при вычислении углов ϕКА(t), ψКА(t), θKA(t)), значительно затрудняющих реализацию в цифровых машинах с поддержкой только целочисленной математики, вследствие чего ограниченным математическим функционалом, а также получение ложных значений угловой скорости при кратковременных недостоверных показаниях с прибора.
Задачей настоящего изобретения является создание способа определения угловых скоростей собственного вращения КА вокруг центра масс, в том числе вокруг направления на Солнце, с использованием целочисленных математических операций и обеспечение защиты от кратковременных ложных показаний с солнечного датчика (СД) для алгоритма, к которому не предъявляются требования по высокой точности определения угловой скорости вращения КА вокруг ЦМ.
Поставленная задача решается следующим образом.
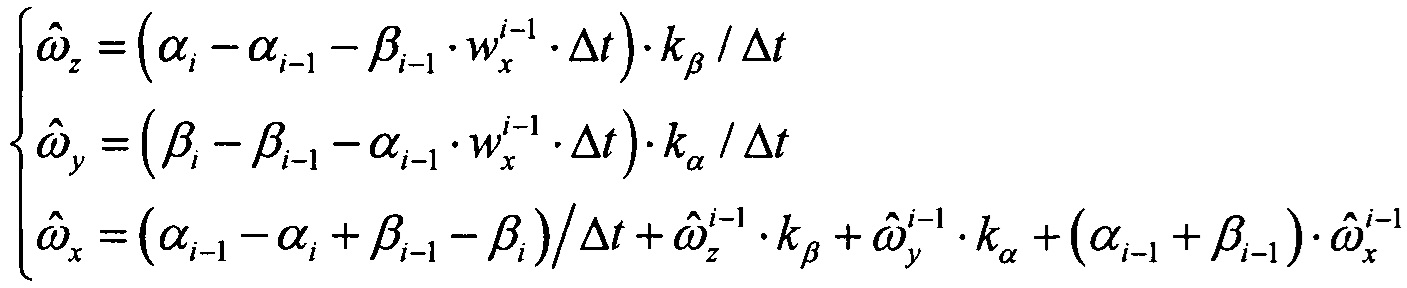
Определение угловой скорости вращения космического аппарата по СД вокруг центра масс заключается в измерении углового положения Солнца относительно осей, связанных с корпусом КА, на последовательных интервалах времени и вычислении оценки угловой скорости на основе полученных данных. Вычисление оценки угловой скорости КА отличается от способа, используемого в прототипе, тем, что вычисление оценок угловых скоростей КА производится исходя из необходимости определения трех составляющих угловой скорости (в том числе и вокруг направления на Солнце) и использования только целочисленной математики по показаниям СД. Оценку угловой скорости собственного вращения КА определяют по формуле

Кроме того, предложенный способ предусматривает фильтрацию вычисленных оценок, что позволяет уменьшить влияние ложных показаний солнечного датчика на вычисленные оценки угловой скорости КА. Фильтрацию производят по формуле:

где αi, αi-1 - угол альфа с солнечного датчика в текущий момент времени и предыдущий;
βi, βi-1 - угол бета с солнечного датчика в текущий момент времени и предыдущий;
k - кусочно-непрерывная функция, заменяющая косинус угла;
Δt - период времени между двумя съемами информации;
 - оценки угловых скоростей КА;
- оценки угловых скоростей КА;
 - коэффициенты фильтра;
- коэффициенты фильтра;
 - используемая угловая скорость в текущий момент времени и предыдущий.
- используемая угловая скорость в текущий момент времени и предыдущий.
Техническая сущность заявленного способа поясняется рисунками.
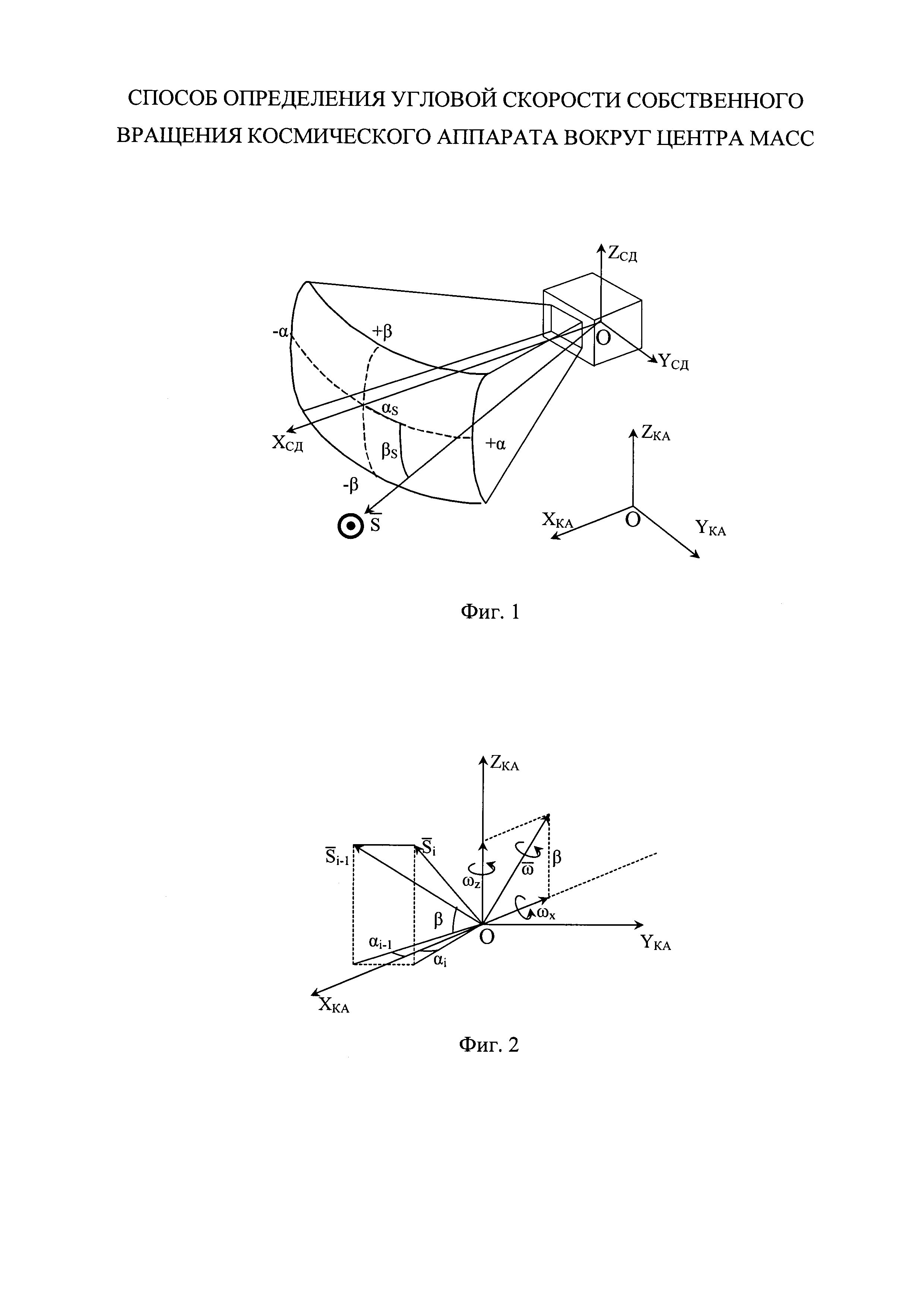
На фиг. 1 показаны СД, его оси и соотношение с осями КА; углы, определяемые СД.
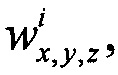
На фиг. 2 показан пример влияния двух угловых скоростей на движение Солнца в поле зрения СД.
На фиг. 1 и фиг. 2 введены следующие обозначения:
OXKA, OYKA, OZKA - оси системы координат, связанные с корпусом КА и проходящие через его ЦМ;
ОХСД, ОYСД, ОZСД - оси системы координат СД (для простоты понимания сущности изобретения их направление совпадает с направлением осей ОХКА, OYKA, OZKA);
+α, -α, +β, -β - направления отсчета углов альфа и бета;
 - вектор направления на Солнце;
- вектор направления на Солнце;
αS, βS - углы отклонения Солнца в системе координат СД;
 , ωx, ωу, ωz - угловая скорость вращения КА и ее проекции на оси связанной с КА системы координат.
, ωx, ωу, ωz - угловая скорость вращения КА и ее проекции на оси связанной с КА системы координат.
Сущность изобретения заключается в том, что перемещение Солнца в поле зрения СД происходит вследствие вращения КА. Имея информацию о двух углах положения Солнца в поле зрения датчика можно оценить изменение трех проекций угловой скорости КА, после чего провести фильтрацию полученной оценки для уменьшения влияния ложных показаний СД на вычисленную угловую скорость.
Скорость изменения направления на Солнце за виток для КА на околоземной орбите (в предположении отсутствия собственного вращения КА вокруг его центра масс) не превышает 2.33⋅10-7 рад/с. Поэтому перемещение Солнца в поле зрения датчика в большей степени (преимущественно) обусловлено вращением КА с собственной угловой скоростью  (ωx, ωу, ωz) и по изменениям координат Солнца в разные моменты времени можно восстановить значение компонент ωx, ωу, ωz угловой скорости КА. Координаты Солнца в поле зрения СД и границы поля зрения прибора представлены на фиг. 1.
(ωx, ωу, ωz) и по изменениям координат Солнца в разные моменты времени можно восстановить значение компонент ωx, ωу, ωz угловой скорости КА. Координаты Солнца в поле зрения СД и границы поля зрения прибора представлены на фиг. 1.
Рассмотрим движение Солнца в поле зрения СД в два последовательных момента времени i и i-1. Координаты Солнца в поле зрения датчика составят αi, βi и αi-1, βi-1 соответственно. На перемещение Солнца в поле зрения по углу α влияют скорости по осям OZKA и OXKA, а по углу β - скорости по осям OYKA и OXKA по следующим формулам:

где αi, αi-1 - угол альфа с СД в текущий и предыдущий моменты времени;
βi, βi-1 - угол бета с СД в текущий и предыдущий моменты времени;
 - истинная угловая скорость КА;
- истинная угловая скорость КА;
Δt - период времени между двумя съемами информации.
Фиг. 2 поясняет формирование координат Солнца в формулах (9), в предположении, что угловая скорость по OYKA равна нулю, для наглядности раскрытия сущности изобретения. Для иных вариантов распределения скорости вращения КА по каналам иллюстрации строятся аналогичным образом.
Для заявленного способа, не требующего высокой точности определения угловой скорости вращения КА, при поле зрения прибора, не превышающем 90°, формула (9) запишется следующим образом:

где  - вычисленные оценки углов α и β в момент времени;
- вычисленные оценки углов α и β в момент времени;
kα, β - кусочно-непрерывная функция, заменяющая косинус угла (при αi, βi не более 0.262 рад kα, β принимались равными 0.99, при αi, βi больше 0.262 рад kα, β принимались равными 0.90), синусы углов заменены самими углами;
 - оценки угловых скоростей КА, которые необходимо найти.
- оценки угловых скоростей КА, которые необходимо найти.
Разница между оценками и измерениями координат Солнца возникает по следующим причинам: неточное знание угловой скорости, погрешности СД и погрешность вычисления. Очевидно, что погрешность измерений и погрешность вычислений вносят менее весомый вклад по сравнению с погрешностью знания скорости.
Из (10) очевидным образом получаем оценки скоростей по осям OZKA и OYKA

Для получения оценки угловой скорости по оси OXKA предположим, что разница по углу α (αi-αi-1) является результатом влияния угловой скорости по оси OZKA, тогда разность между оценкой угла и самим углом  будет вызвана неучтенной скоростью по оси OXKA. Аналогичные рассуждения справедливы и для угла β. В таком предположении оценку угловой скорости по оси OXKA определим по формуле
будет вызвана неучтенной скоростью по оси OXKA. Аналогичные рассуждения справедливы и для угла β. В таком предположении оценку угловой скорости по оси OXKA определим по формуле

или

Для уменьшения влияния кратковременных ложных показаний СД вычисленные оценки угловой скорости дополнительно проходят фильтрацию

где  - коэффициенты фильтра
- коэффициенты фильтра  ;
;
 - используемая угловая скорость КА в текущий и предыдущий моменты времени.
- используемая угловая скорость КА в текущий и предыдущий моменты времени.
Значения коэффициентов фильтра лежат в диапазоне (0…1) и выбираются исходя из требуемой скорости сходимости фильтра, параметров СД и необходимой точности определения собственной угловой скорости КА.
Подставим в правые части системы (11) и уравнения (14) используемые угловые скорости  вместо их оценок
вместо их оценок  , тогда формулы вычисления оценок угловой скорости принимают окончательный вид
, тогда формулы вычисления оценок угловой скорости принимают окончательный вид

Таким образом, алгоритм определения и фильтрации угловых скоростей КА по солнечному датчику заключается в следующем.
а) на первой итерации определяют и запоминают угловое положение Солнца в связанной с КА системе координат. Начальные значения используемых скоростей и их оценок поступают из других источников либо, при их отсутствии, принимаются равными нулю;
б) со второй итерации повторяют следующие действия на каждом шаге измерений:
1) по показаниям солнечного датчика определяют угловое положение Солнца относительно осей, связанных с корпусом КА;
2) по формулам (15) вычисляют оценку угловой скорости собственного вращения КА в текущий момент времени по запомненным на предыдущем шаге данным и текущим измерениям об угловом положении Солнца (индексы i-1 и i соответственно);
3) по полученным оценкам угловой скорости по формулам (14) получают значения используемой скорости в текущий момент времени;
4) текущая информация о положении Солнца, значения управляющих скоростей и их оценки запоминаются для следующей итерации.
Данный метод определения угловых скоростей без использования датчиков скорости КА успешно подтвержден испытаниями в составе геостационарного КА, погрешность определения угловой скорости КА при выбранных коэффициентах фильтра  составила не более 0.1°/с, если Солнце находилось на краю поля зрения СД, и не более 0.05°/с при отклонении направления на Солнца от центра поля зрения СД до 45°.
составила не более 0.1°/с, если Солнце находилось на краю поля зрения СД, и не более 0.05°/с при отклонении направления на Солнца от центра поля зрения СД до 45°.
Таким образом, предложенный метод определения собственной угловой скорости КА по солнечному датчику, без применения приборов измерения угловой скорости КА и без применения сложных математических вычислений, позволяет определить все три составляющие вектора угловой скорости, уменьшает влияние ошибок солнечного датчика на определение угловой скорости КА. Данное изобретение может быть эффективно использовано для средних и тяжелых КА в качестве резервного алгоритма определения угловой скорости на случай отказа датчиков угловой скорости в режимах ориентации, для которых требуемая погрешность определения угловой скорости вращения КА не более 0.1%.





Распределенная измерительно-управляющая система
Способ компоновки приемной системы геостационарного космического аппарата для связи с низкоорбитальными объектами ракетно-космической техники
Силовая конструкция платформы космического аппарата
Способ коррекции орбитального движения космического аппарата
Универсальная платформа космического аппарата
Система измерения дальности космического аппарата
Регулируемый узел крепления конструкций с интерфейсом на стропах
Способ эксплуатации литий-ионной аккумуляторной батареи в составе космического аппарата негерметичного исполнения
Способ эксплуатации литий-ионной аккумуляторной батареи в составе автономной системы электропитания искусственного спутника земли
Способ эксплуатации литий-ионной аккумуляторной батареи в составе космического аппарата негерметичного исполнения
Способ определения трехосной ориентации космического аппарата

