Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО В СИСТЕМЕ ВЗВЕШИВАНИЯ, СООТВЕТСТВУЮЩИЙ ПРОДУКТ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ И МАШИНА ДЛЯ ПОГРУЗКИ-РАЗГРУЗКИ МАТЕРИАЛОВ
Вид РИД
Изобретение
Изобретение относится к способу в системе взвешивания, при этом способе
- по меньшей мере, одна пачка поднимается краном, оборудованным системой взвешивания, для того, чтобы сформировать груз,
- масса пачки взвешивается,
- масса взвешенной пачки записывается,
- из записанной массы определяется опорное значение для груза,
- система взвешивания регулируется на основе опорного значения.
Изобретение также относится к устройству в системе взвешивания, соответствующему продукту программного обеспечения и машине для погрузки-разгрузки материалов.
В соответствии с предшествующим уровнем техники, в лесоводстве и, в особенности в заготовке и покупке лесоматериала, установленным способом измерения стало измерение объема. Это может быть сделано надежно, даже автоматически, например, с использованием как таковых известных лесозаготовительных машин и измерительных устройств, используемых в них. Кроме того, особенно раньше, измерение объема осуществлялось, например, на деревообрабатывающих предприятиях, например путем погружения и с помощью, так называемой мерной рамы или различных шлюзов измерения, таких как система, основанная на лазерном измерении. Тем не менее, особенно в терминах действующей логистики, было бы выгодно иметь измерение, выполненное на возможном более раннем этапе в цепочке лесозаготовки древесины, например, предпочтительно сразу в процессе лесозаготовки или местной перевозки лесоматериала.
В частности, в связи с лесозаготовкой древесины для топлива, которая стала распространенным в последние годы, трудно организовать надежное и функционирующее измерение объема, связанного с дробильной машиной, заготавливающей указанный сорт лесоматериала, или какая-либо другой машиной заготовки древесины, когда заготавливаемый материал древесины или сорт древесины представляет собой часто небольшой диаметр и имеет форму ствола, которая такова, что на практике невозможно точно измерить его диаметр или длину. Кроме того, в случае лесоматериала для топлива наиболее широко используется форма заготовки, так называемая обработка пачки, а не заготовка одного дерева. Это означает главным образом, что несколько стволов одновременно подаются через головку лесозаготовительной машины и обрабатываются головкой лесозаготовительной машины, возможно, будучи частично или полностью зачищены от сучьев или, альтернативно, не очищены от сучьев вообще. В будущем, также возможно, что оплата местной транспортировки, то есть тариф или пошлина, уплаченная за транспортировку другого, нежели лесоматериала для топлива также, например, обычной товарной древесины, такой как бревенчатый или волокнистый лесоматериал, может быть основана на массе, которая подчеркнула бы важность точного взвешивания.
Для вышеупомянутых причин среди других, в лесопользовании, в частности, в закупке волокна и лесоматериала для топлива, а также пней, заготавливаемых для использования в топливных целях, было сделано изменение для взвешивания указанного сорта лесоматериала уже в лесу. Другими словами, было сделано изменение для использования измерения, основанного на массе вместо обычного измерения, основанного на объеме, как лесоматериала для топлива, так и других фракции, собранных в лесу, которые имеют много различных свойств. Для этой цели чаще всего на погрузчик форвардера устанавливается специальный весовой измеритель погрузчик, который взвешивает каждую поднятую пачку. В связи с этим, термин пачка относится к отдельной передачи одного или нескольких деревьев/бревен, например, от следующих за форвардером к грузовому пространству форвардера или наоборот, выполняется с использованием грейфера или аналогичного элемента захвата. Как правило, массы отдельно взятых пачек суммируются, чтобы получить полную массу груза форвардера и, соответственно, массы грузов суммируются для получения массы всего накопления лесоматериала на площади заготовки сортами древесины. Поскольку, как правило, измерение, сделанное этим способом с помощью весового измерителя погрузчика является единственным взвешиванием во всей цепочке поставки, результат взвешивания должен соответствовать приемлемой точности для действительной массы заготовленных и транспортируемых пачек. Продавец и покупатель могут рассчитывать на правильность взвешивания. Весовой измеритель погрузчик, описанный выше, как часть системы взвешивания, устанавливается на погрузчике, действующем в качестве подъемного устройства, в частности, в случае форвардера или лесовоза. Подъемное устройство также может быть, например, краном, который используется независимо для передачи каких-либо объемных или штучных товаров, хотя преимущества решения согласно изобретению подчеркнуты в весовых системах, в которых особенности взвешенного материала и сам процесс погрузки вызывают отклонения и неточности в результате взвешивания.
Чтобы настроить весовой измеритель погрузчик, оценивать и контролировать его работу или точность взвешивания, было разработано контрольное взвешивание. Программное обеспечение, в котором может быть запрограммирована приемлемая точность, например, в дополнение к другим функциям, связанным с весовым измерителем погрузчиком, хранится в центральном процессорном блоке, принадлежащем к весовому измерителю погрузчику. В известном контрольном взвешивании, используется специальная контрольная пачка с известной массой, которая передается от грузового пространства трактора погрузчика к стеку, в соответствии с обычными процедурами работы, как это делается в действительных погрузочных работах с пачками, загружаемыми обычным образом. Передачи повторяются, и значение каждого взвешивания записывается. На основе значений, данных контрольным взвешиванием, сделанным таким образом, весовой измеритель погрузчик регулируется так, что значение, измеренное/определенное весовым измерителем погрузчиком соответствует массе контрольной пачки, которая была использована в контрольном взвешивании. Регулировка, предпочтительно, осуществляется программно, таким образом, что водитель вводит, или, по меньшей мере, подтверждает предлагаемую поправку, например, с помощью центрального процессорного блока системы взвешивания.
В существующем контрольном взвешивании используется специальная контрольная пачка с известной массой, однако, есть определенные недостатки, в частности, в случае ситуации динамического взвешивания. В практических испытаниях было показано, что действительная масса лесоматериала, в некоторых случаях, может слишком отклонятся от массы, полученной с помощью весового измерителя погрузчика. Например, чтобы точно показать массу контрольной пачки, используя известный способ контрольного взвешивания путем регулировки весового измерителя погрузчика, в качестве действительного результата весового измерителя погрузчика может быть получена слишком большая масса. Может быть несколько причин для этого в самой системе взвешивания, в материале, который взвешивается, или, например, из-за условий окружающей среды.
Существует одно существенное отличие между контрольным грузом и фактическими пачками, особенно пачками лесоматериала для топлива. Пачка лесоматериала для топлива, вес которой по существу соответствует по порядку величины контрольному весу, в длину, как правило, значительно больше, чем контрольный вес. Такая пачка может иметь практически произвольную форму также в своих других размерах, что может вызвать изменения в точности выполнения взвешивания в ситуации динамического взвешивания, когда пачка находится во вращательном и/или поступательном движении по отношению к одной или нескольким осям. В своей самой длинной части, пачка лесоматериала для топлива может быть даже почти десять метров в длину, включая полные деревья для топлива или, по меньшей мере, длинные части стволов. Как правило, тип лесоматериала в пачке, его масса и размеры влияют на событие погрузки и, таким образом, на результат измерения. Другие факторы включают в себя окружающую среду, водителя, и машину, такую как форвардер. Другими словами, то, что весовой измеритель погрузчик отображает, может быть ошибочным по отношению к действительной массе по нескольким различным причинам.
Кроме того, контрольное взвешивание, сделанное со специальным контрольным весом занимает, с его повторениями, излишне большое количество фактического рабочего времени и не является продуктивной работой. Таким образом, на практике контрольное взвешивание может даже осуществляется только примерно один раз в неделю, что не обязательно достаточно, чтобы обеспечить хорошую точность взвешивания. В течение недели условия и эксплуатация устройства, однако, могут измениться, таким образом, увеличивая риск погрешности взвешивания. Как правило, такое изменение может быть, например, изменением в электронике, влияющим на измерение подвешенного груза, или в частности изменением нулевой точки или чувствительности тензодатчиков, которые могут привести к необходимости повторной калибровки или контрольному взвешиванию. Точно так же, в течение недели или дня могут меняться сорт лесоматериала и оператор системы взвешивания и погрузчика, что может добавиться к погрешности. Кроме того, контрольное взвешивание всегда требует отдельного контрольного веса, который должен перевозиться вместе с форвардером. Однако контрольный вес должен быть относительно тяжелым, другими словами с массой, сравнимой с обычной пачкой, как правило, около 500 кг, так что перевозка его с форвардером не очень легка и также не может храниться или транспортироваться непрерывно, например, с форвардером в ситуации практической работы. Контрольный груз может быть утерян или он может быть поврежден, когда обрабатывается или могут измениться другие его свойства, несмотря на то, что он сконструирован, чтобы быть как можно более стабильным и прочным для своей цели, что дополнительно снижает надежность контрольного взвешивания.
Из предшествующего уровня техники, также известной является публикация WO 2012/101325 А1, которая раскрывает способ, разработанный заявителем для системы взвешивания контрольного взвешивания. В этом способе действительная пачка, которая поднимается, взвешивается в произвольном порядке при погрузке груза, как в движении, так и в неподвижном состоянии. На основе измеренных масс, формируется опорное значение, которое сравнивается со значениями контрольного взвешивания и соответствующими, полученными ранее опорными значениями. На основе сравнения, вычисляется точное значение, на основе которого регулируется система взвешивания и/или устанавливается точность системы взвешивания.
Однако, проблема такого способа в том, что в направлении погрузки события поднятия взаимно очень отличаются из-за почти произвольного расположения стволов деревьев по отношению к форвардеру. Соответствующие в направлении разгрузки, например, стволы деревьев, погруженные в грузовое пространство форвардера, обычно ориентированы регулярно параллельно продольному направлению машины и разгрузка на землю также происходит таким образом, что деревья укладывают посуществу параллельно друг другу, что делает событие разгрузки значительно более управляемым, чем событие погрузки. Другими словами, в направлении погрузки есть большие различия в расстоянии и направлении по отношению к форвардеру стволов деревьев, которые поднимаются. В этой связи, ссылка на стволы деревьев означает как обрезанные части ствола дерева, т.е. так называемые бревна, так и целые стволы деревьев, в зависимости от их длины. Кроме того, масса пачки значительно варьируется из-за отдельных стволов деревьев для пачки, которыми заполняется весь грейфер. В целом, однако, грейферы более или менее частично заполнены, из-за чего среднее отклонение поднятой массы велико. Из-за сложности сбора стволов деревьев, центр тяжести пачки часто устанавливается за пределами грейфера, из-за чего пачка наклоняется, когда загружается. В дополнение к этому в проходной рубке погрузчик и пачка должны избегать деревьев, оставшихся стоять, что приводит к существенному изменению в пути движения и скорости погрузчика и обычного использования ротатора. На конечном этапе поднятия, стволы деревьев пачки часто должны быть расположены в грузовом пространстве, создавая плотность груза даже со стороны коника грузового пространства. Факторы, упомянутые выше среди других, в сочетании с неидеальностями, появляющимися в устройствах измерения значительно снижают точность измерения весового измерителя груза в направлении погрузки. Конкретно для поднятия, увеличивается отклонение погрешности, а также часто возникает постоянное смещение в погрешности. В этой связи, направление погрузки относится к поднятиям пачек, посредством которых дерево или деревья передаются к грузовому пространству форвардера, и направление разгрузки, в свою очередь, к поднятиям, с помощью которых дерево или деревья передаются из грузового пространства форвардера, например, на землю рядом с форвардером.
Изобретение предназначено создать новый тип системы взвешивания, с помощью которой точность системы взвешивания улучшается, в случае погрузки, проще и быстрее, чем раньше. Кроме того, изобретение предназначено создать новый тип продукта программного обеспечения, с помощью которого повышается точность системы взвешивания. Кроме того, изобретение предназначено создать новый тип устройства для контрольного взвешивания системы взвешивания, которое может быть реализовано с помощью известных компонентов и с помощью которого при погрузке достигается более высокая точность взвешивания, чем с помощью устройства системы в соответствии с предшествующим уровнем техники. Изобретение также предназначено создать новый тип машины для погрузки-разгрузки материалов, с помощью которой также достигается точное взвешивание в направлении погрузки. Характерные признаки способа, в соответствии с настоящим изобретением, указаны в прилагаемом п. 1 формулы изобретения, и характерные признаки продукта программного обеспечения, в соответствии с изобретением - в прилагаемом п. 12 формулы изобретения. Соответственно, характерные признаки устройства, согласно изобретению, указаны в прилагаемом п. 13 формулы изобретения, и характерные признаки машины для погрузки-разгрузки материалов в соответствии с изобретением - в прилагаемом п. 17 формулы изобретения.
С помощью способа согласно изобретению, погрешности измерения направления погрузки могут быть эффективно и преимущественно устранены. Способ основан на знании того, что информация измерения направления разгрузки, как правило, очень точна. Если масса груза, измеренного в процессе погрузки сравнивается с массой, измеренной в процессе разгрузки того же груза, то на основе этих результатов может быть вычислено опорное значение, например, относительная разность масс груза. На основе этого опорного значения может быть вычислен поправочный коэффициент, используя который подъемы направления погрузки могут быть скорректированы, для того, чтобы груз направления погрузки дал тот же результат, как и в направлении разгрузки. Поскольку значение разности между способами и поправочный коэффициент можно вычислить только после разгрузки, поправочный коэффициент, таким образом, будет доступен только при погрузке следующего груза. Задержка одного груза, однако, не является существенным ущербом, потому что, при работе на том же участке относительные опорные значения отклоняются достаточно мало друг от друга, так что вычисленные специально для погрузки, поправочные коэффициенты будут очень мало отклоняться друг от друга. Поскольку некоторые из грузов, однако, могут быть исключительными по сравнению со средним грузом, в связи с исключительными подъемами и их последующими погрешностями измерения, было бы хорошо ограничить влияние одного груза на поправочный коэффициент, например, путем фильтрации. Поправка предпочтительно всегда должна быть сделана для машины и/или конкретно водителя, потому что водители действуют и управляют кранами различными способами, а конструкция и эксплуатация машин, как правило, отличаются друг от друга. Кроме того, поправка может быть сделана либо как таковыми известными способами, либо обычно, либо конкретно для сорта лесоматериала, либо конкретно для сорта изделий и древесины. При необходимости, также может быть принято в расчет направление движения при погрузке.
Более конкретно, назначение способа, согласно изобретению может быть достигнуто с помощью способа в системе взвешивания, в этом способе, с помощью крана, оборудованного системой взвешивания, по меньшей мере, одна пачка поднимается для того, чтобы сформировать груз, масса пачки взвешивается, и масса взвешенной пачки записывается. В процессе погрузки, масса каждой пачки взвешивается, и вычисляется результат поправочного коэффициента, чтобы сформировать скорректированную массу пачки, а полная погруженная масса вычисляется из скорректированной массы одной или более пачек, взвешенных в процессе погрузки. Кроме того, масса пачки взвешивается вместе с разгрузкой, и полная разгруженная масса вычисляется из массы одной или более пачек, взвешенных в процессе разгрузки. С помощью полной погруженной массы и полной разгруженной массы формируется опорное значение для груза, как только весь груз был выгружен. На основании опорного значения груза, для поправочного коэффициента вычисляется новое скорректированное значение, для того, чтобы регулировать взвешивание груза для погрузки следующего груза, т.е. система взвешивания регулируется на основе опорного значения груза. Путем сравнения полных масс погрузки и разгрузки получается оценка величины погрешности и необходимой поправки при взвешивании в направлении погрузки. Используя такой способ, взвешивание погрузки также становится точным, так что, например, емкость транспортировки форвардера может быть использована более точно.
Среди общих признаков, которые изобретение имеет с предшествующим уровнем техники - это подъем, по меньшей мере, одной пачки с помощью крана, оборудованного системой взвешивания для формирования груза, взвешивание и запись массы пачки. Кроме того, опорное взвешивание выполняется с контрольным весом. Кроме того, опорное значение для груза определяется из записанной массы, а на основе опорного значения груза регулируется система взвешивания. В способе согласно изобретению, результат взвешивания разгрузки груза используется в качестве эталона, вместо ранее используемого контрольного веса. Изобретение основано на наблюдении того, что результат взвешивания разгрузки является весьма точным и может быть использован в качестве эталона, с помощью которого измерение погрузки может быть скорректировано. В соответствии с изобретением, взвешивание погрузки регулируется только после предыдущего события погрузки-разгрузки.
Предпочтительно, в способе для получения скорректированной массы пачки вычисляется произведение массы каждой пачки, взвешенной при проведении погрузки и поправочного коэффициента. Таким образом, получается точный скорректированный результат для каждого подъема.
Предпочтительно опорное значение для груза формируется с помощью полной погруженной массы и полной разгруженной массы, на основе которых вычисляется указанное новое скорректированное значение для поправочного коэффициента. Опорное значение также может быть использовано для оценки точности измерения.
Предпочтительно, взвешивание погрузки регулируется для каждого груза. Таким образом, погрешность при взвешивании погрузки может быть устранена как можно быстрее, уже после нескольких грузов.
Масса одной пачки каждой погрузки может регулироваться с помощью поправочного коэффициента. Таким образом, масса каждой пачки, то есть, например, количество в грейфере, будет в среднем точно известно, и, при необходимости, груз может быть разгружен, даже в середине погрузки.
Поправочный коэффициент, вычисленный с помощью груза, может быть использован для регулировки взвешивания погрузки следующего груза или грузов. Таким образом, взвешивание погрузки очередного груза будет снова в среднем более точным, а погрешность меньше. В некоторых случаях, будет невозможно сформировать надежное опорное значение, и в этом случае при погрузке следующего груза будет использоваться самый последний поправочный коэффициент. Это может произойти, например, если события погрузки или разгрузки значительно отличаются от нормальной последовательности.
Согласно другому варианту осуществления, поправочный коэффициент предыдущего груза может быть использован для корректирования полной массы погрузки следующего груза. В этом случае, вычисляется только произведение поправочного коэффициента и полной массы погрузки, что позволит снизить количество вычислений.
В вычислении поправочного коэффициента предпочтительно используется фильтрация. Влияние одного груза на поправочный коэффициент будет меньше, что, в свою очередь, уменьшит возможный шум в поправочном коэффициенте.
Может быть отфильтровано 50-90%, предпочтительно 65-75% влияния одного груза на поправочный коэффициент. Другими словами, влияние указанного одного груза на поправочный коэффициент может быть отфильтровано путем умножения опорного значения на число 0,5-0,9, предпочтительно 0,65-0,75. В стабильных условиях, погрешность будет уменьшаться, чтобы стать маленькой уже после 5-8 грузов, но в то же время шум в поправочном коэффициенте остается небольшим.
Согласно одному варианту осуществления, влияние одного груза на поправочный коэффициент может быть отфильтровано, например, путем формирования нового поправочного значения путем вычисления взвешенного среднего значения для предыдущего поправочного коэффициента и из поправочного коэффициента, вычисленного на основе последнего груза. Чувствительность реакции поправочного коэффициента может зависеть от взаимного соотношении коэффициентов взвешивания, используемых для расчета среднего значения. Например, значения взвешивания могут быть 0,25 для старого скорректированного значения и 0,75 для поправочного коэффициента, вычисленного на основе последнего груза. Чем больше относительное значение взвешивания данное для поправочного коэффициента, вычисленного на основе последнего груза, тем быстрее новый поправочный коэффициент будет соответствовать изменениям в условиях. С другой стороны, очень большой относительный коэффициент взвешивания для поправочного коэффициента последнего груза может привести к шуму в поправочном коэффициенте, если условия значительно различаются между грузами по некоторым причинам. Если коэффициент взвешивания поправочного коэффициента последнего груза делится коэффициентом взвешивания предыдущего поправочного коэффициента, то полученное таким образом отношение может быть, например, в диапазоне от 0,1-10, предпочтительно в диапазоне 1-3.
Согласно одному варианту осуществления, в фильтрации используется скользяще среднее значение. Использование скользящего среднего значения активно регулирует фильтрацию на основе предыдущих грузов. Количество предыдущих грузов влияет на расчет нового поправочного коэффициента, и в некоторых случаях также их взаимное значение взвешивания может быть изменено с тем, чтобы добиться желаемого поведения фильтрации. В этом случае, можно эффективно влиять на эффективность фильтрации.
Согласно другому варианту осуществления, в фильтрации используется адаптивная фильтрация. Это относится к смарт-фильтрации, которая независимо регулирует параметры фильтрации на основе внешней информации, например, изменении в условиях. Таким образом, например, в связи с изменением, наблюдаемым в условиях, фильтрация может быть первоначально небольшой и фильтрации может быть увеличена в случае последующих грузов.
Поправочный коэффициент, предпочтительно, вычисляется в зависимости от условий. Это относится к поправочному коэффициенту, который всегда вычисляется при изменении условий во взвешивании погрузки. Таким образом, можно принять в расчет погрешности, происходящие из-за изменившихся условий взвешивания при взвешивании погрузки. В ситуациях, в которых изменение условия известно, например, в изменении рабочей зоны, может быть, например, инициализирована поправка, или может быть временно ускорено регулирование поправки, до тех пор, поправка не будет отрегулирована в соответствии с преобладающей окружающей средой. Поправка может быть ускорена, например, путем изменения параметров фильтрации.
Предпочтительно, например, когда новый водитель начинает работу в первый раз с машиной, о которой идет речь, или после начала использования новой машины или устройства измерения, для вычисления скорректированного значения погрузки первого груза используются нейтральные начальные скорректированные значения. Поправочный коэффициент будет затем сохранять результат взвешивания неизменным в случае погрузки первого груза.
Согласно одному варианту осуществления, для вычисления скорректированного значения погрузки первого груза водителя, используется какой-либо другой коэффициент водителя или среднее значение водителей в системе или соответствующее комбинированное значение.
Цель продукта программного обеспечения в соответствии с изобретением может быть достигнута с помощью продукта программного обеспечения, который использует способ в соответствии с изобретением, описанным выше. Продукт программного обеспечения может быть легко обновлен, как и обновление программного обеспечения уже существующих систем взвешивания, делая стоимость изменения как можно ниже, а событие обновления чрезвычайно дружелюбным для пользователя.
Цель устройства, согласно изобретению может быть достигнута с помощью устройства в системе взвешивания, при этом кран, принадлежащий к системе, оборудован системой взвешивания для взвешивания пачки, которая должна быть поднята краном, и данная система взвешивания включает в себя блок вычисления для вычисления массы пачки, взвешенной системой взвешивания и памятью для записывания массы. Блок вычисления выполнен с возможностью регулировать систему взвешивания на основе записанных масс пачек. В устройстве, система взвешивания выполнена с возможностью взвешивать массу каждой пачки груза, связанной как с погрузкой, так и с разгрузкой пачки. Блок вычисления выполнен с возможностью умножать массу каждой пачки, взвешенной в процессе погрузки на поправочный коэффициент, чтобы сформировать скорректированную массу пачки и вычислить полную массу погрузки из скорректированных масс одной или более пачек, взвешенных в процессе погрузки. Кроме того, блок вычисления выполнен с возможностью вычислять полную загруженную массу из масс одной или более пачек, взвешенных в процессе разгрузки, чтобы сформировать опорное значение груза с помощью полной массы погрузки и полной массы разгрузки, и вычислить на основе опорного значения груза скорректированное значение для поправочного коэффициента, для того, чтобы регулировать взвешивание погрузки для погрузки очередного груза.
Блок вычисления предпочтительно выполнен с возможностью вычислять произведение массы каждой пачки, взвешенной в процессе погрузки и поправочного коэффициента, чтобы сформировать скорректированную массу груза. Таким образом, с каждым подъемом получается точный скорректированный результат.
Блок вычисления предпочтительно выполнен с возможностью формировать опорное значение груза с помощью упомянутой полной массы погрузки и полной массы разгрузки, на основе которого для поправочного коэффициента вычисляется скорректированное значение, чтобы регулировать взвешивание погрузки в погрузке следующего груза. Опорное значение можно также использовать для оценки точности измерения.
Устройство, предпочтительно, включает в себя программные средства, которые выполнены с возможностью записывать результаты взвешиваний погрузки и разгрузки, обрабатывать записанные данные, и выполнять вычисление опорного значения.
С помощью способа согласно изобретению получено несколько преимуществ, по сравнению со способами в соответствии с предшествующим уровнем техники. Благодаря обратной связи скорректированного значения, способ корректирует среднюю погрешность в направлении погрузки, практически несколькими циклами итерации до, примерно, величины погрешности измерения разгрузки. Единственным требованием для использования способа является то, что измерение направления разгрузки должно быть калиброваным и точным. Способ может быть реализован без дополнительных операций со стороны водителя. Способ также может быть реализован без требований или ограничений к событию погрузки или типу погрузки, так что использование способа не замедляет работу. Способ согласно изобретению может быть реализован без последовательностей калибровки, сделанных с весом и выборочным подъемом, которые требуются в способах в соответствии с известным уровнем техники. Проверки, сделанные с весом, могут быть использованы для проверок направления разгрузки и калибровки.
В способе согласно изобретению, скорректирование масс пачек погрузки может быть полностью автоматизировано, и может быть полностью скрыто от оператора, так что оператор может использовать способ, не зная о наличии этой особенности. Способ может быть введен в форвардеры в полевых условиях или в другие машины, взвешивающие груз только обновлением программного обеспечения.
Точность взвешивания погрузки важна, потому что более точное взвешивание в процессе погрузки позволяет более точную погрузку груза, так что масса груза близка к оптимуму. С помощью способа согласно изобретению, груз может быть погружен как можно ближе к оптимальному в процессе погрузки, что улучшает эффективность транспортировки. На практике, оптимизация груза к максимальному грузу, как правило, затруднена тем, что различные виды лесоматериала, такие как древесина для топлива, деловая древесины, бревна, и тому подобные, имеют различные типовые плотности и, с другой стороны, содержание влаги вышеупомянутых материалов также может оказать существенное влияние на действительную массу. Таким образом, даже опытному водителю, без функционирующего взвешивания также действующего в направлении погрузки, трудно очень точно, чисто визуально оценить, например, массу груза, накапливающегося в грузовом пространстве форвардера.
Далее, изобретение описывается подробно со ссылкой на прилагаемые чертежи, показывающие некоторые варианты осуществления изобретения, в которых
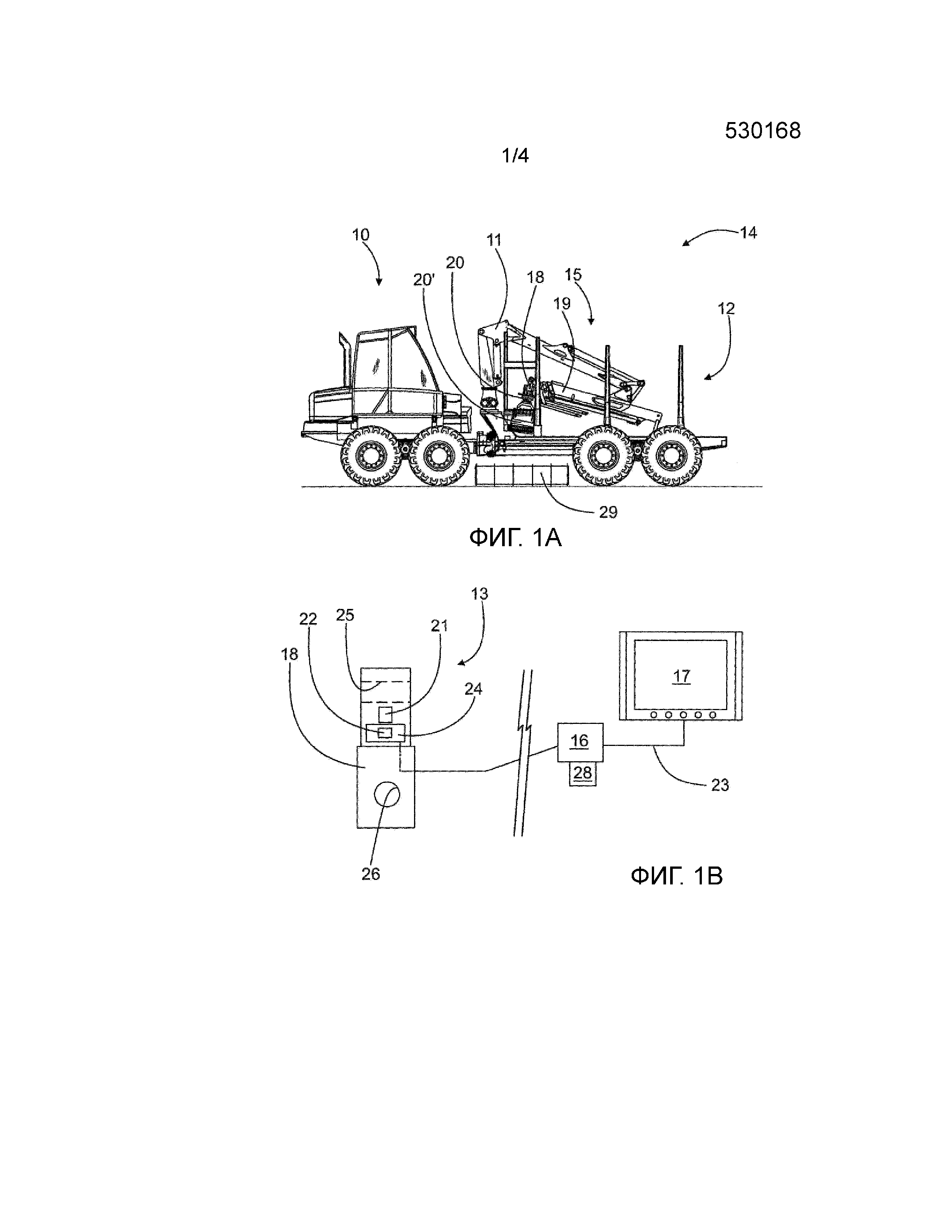
Фиг. 1A показывает вид форвардера сбоку,
Фиг. 1B показывает блок-схему самого обычного весового измерителя погрузчика с центральным процессорным блоком, отдельным от погрузчика,
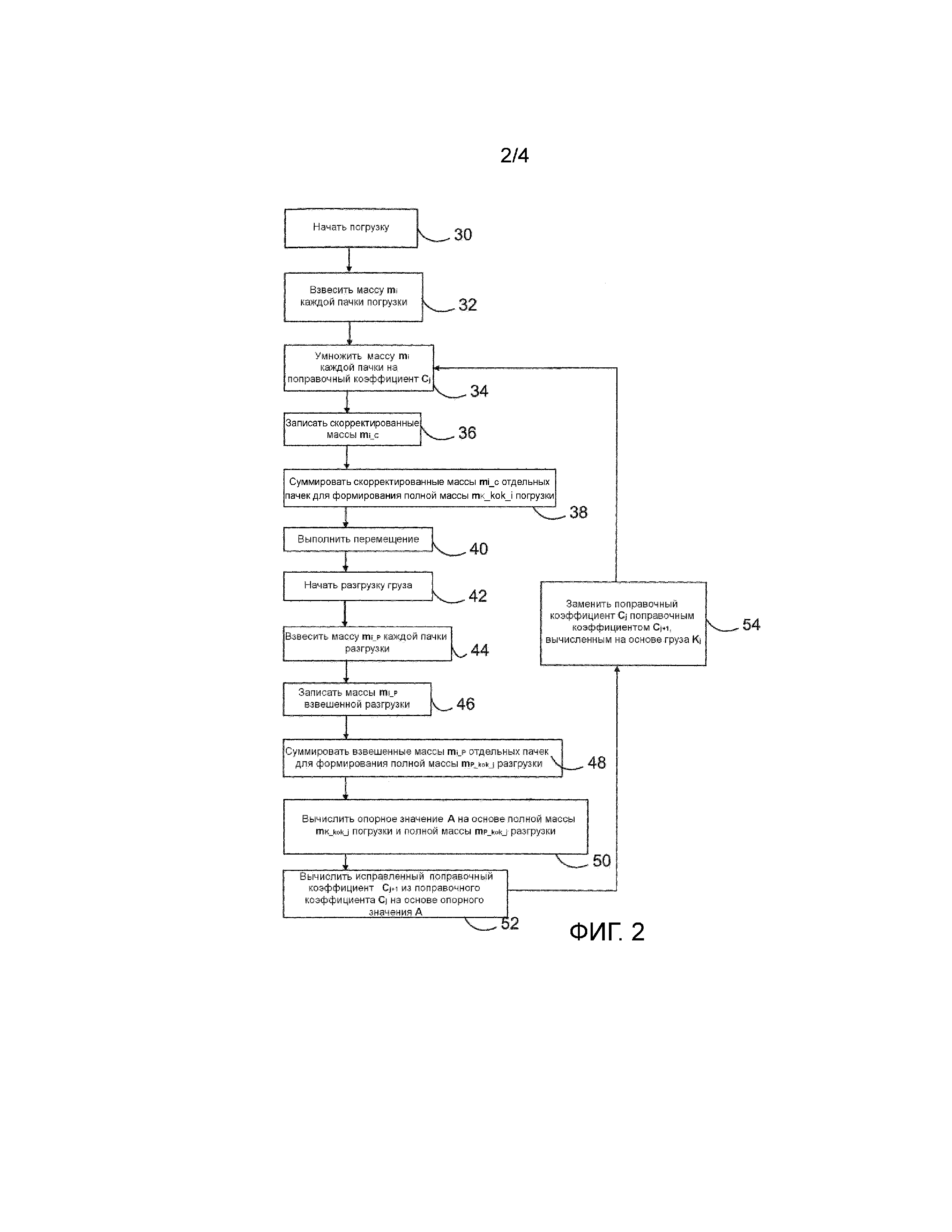
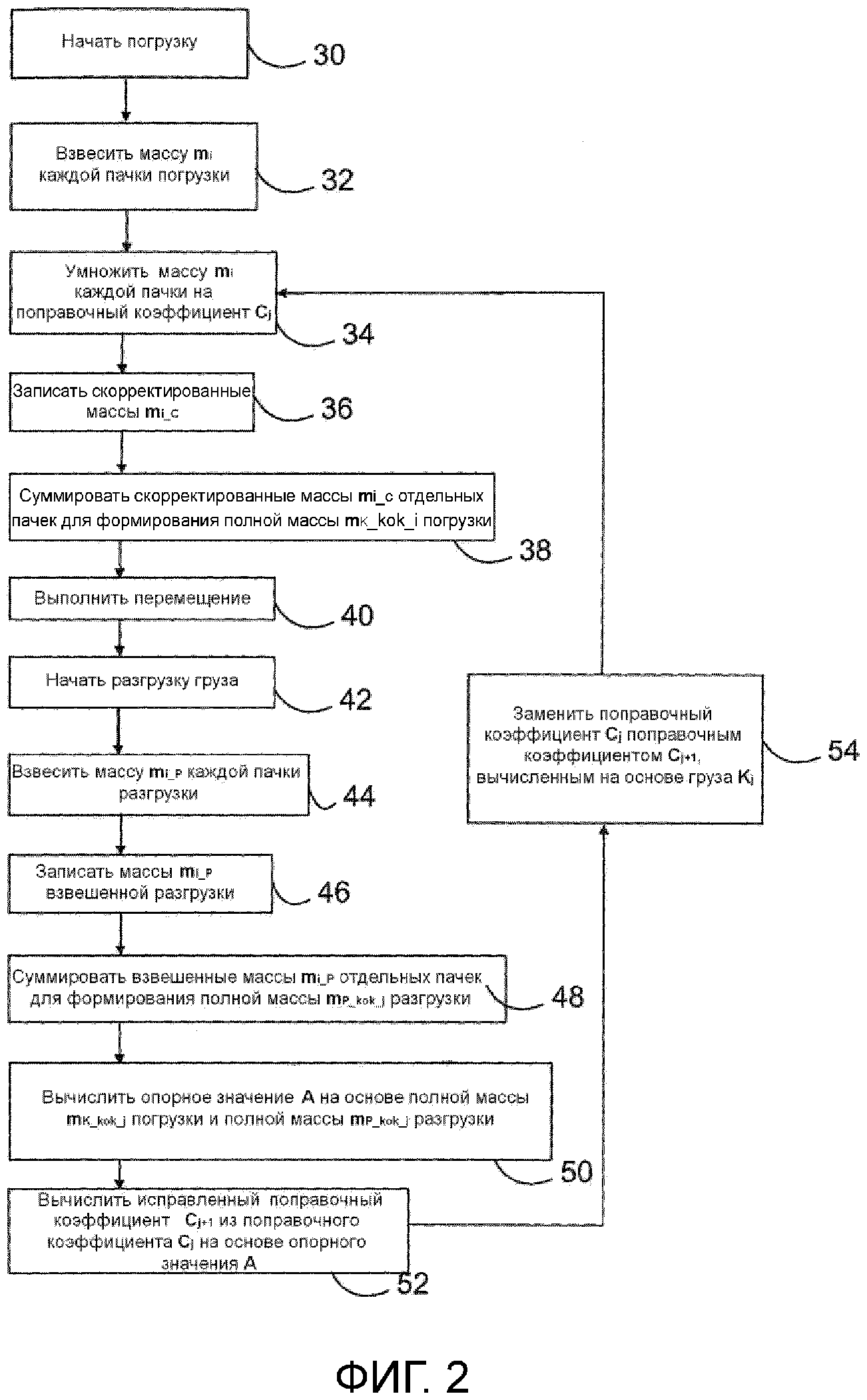
Фиг. 2 показывает этапы способа в соответствии с изобретением,
Фиг. 3 показывает более подробно этапы способа в соответствии с изобретением для определения поправочного коэффициента,
Фиг. 4 показывает развитие поправочного коэффициента и скорректированной полной массы погрузки способа согласно изобретению в примерном графике.
Фиг. 1A показывает как таковой, известный форвардер 10, который включает в себя погрузчик 11 и грузовое пространство 12. Фиг. 1B показывает блок-схему весового измерителя погрузчика 13 с его принадлежностями. Здесь форвардер является примером машины для погрузки-разгрузки материалов, в которой существует устройство, согласно изобретению. В качестве примера варианта осуществления показана система 14 взвешивания, в которой кран 15 является погрузчиком, и система взвешивания включает в себя весовой измеритель погрузчик 13. Блок 16 вычисления, принадлежащий к этой совокупности предпочтительно расположен, например, в кабине форвардера, и имеет в нем устройство 17 отображения для передачи информации и вывода на экран для оператора системы взвешивания (фиг. 1B). Устройство отображения, блок вычисления и другие необходимые средства обработки данных могут быть как таковые известными устройствами, выполненными с возможностью обслуживать лесотехническую машину или другое транспортное средство, или рабочую машину, как правило, или в частности быть выполненными для весового измерителя погрузчика, например, в лесотехнической машине. Блок вычисления имеет необходимую мощность обработки, чтобы обрабатывать данные измерения весового измерителя погрузчика и отображать их для оператора. Блок вычисления может также иметь необходимую емкость хранения для записи данных, но это также может быть в памяти 28, отделенной от блока вычисления.
Весовой измеритель погрузчик сформирован из подвесного кронштейна 18, прикрепленного между стрелой 19 погрузчика 11 и ротатором 20. В варианте осуществления, показанном на фиг. 1A, прикрепленным к ротатору 20 является грейфер 20', который ротатор 20 вращает. Весовой измеритель погрузчик также может быть установлен на других транспортных средствах или машинах, которые, связаны с подъемом и транспортировкой и в которых требуется надежное взвешивание. Подробная конструкция весового измерителя погрузчика и размещение компонентов таковы, что погрузчик может в значительной мере изменяться в пределах объема настоящего изобретения. Например, датчики силы и возможного ускорения, содержащиеся в подвесном кронштейне и упомянутые в детальном описании варианта осуществления могут быть также расположены где либо еще, нежели между концом стрелы и ротатором, однако таким образом, чтобы желаемая сила и/или данные веса и, например, данные ускорения могли быть измерены.
Длина подвесного кронштейна обычно составляет около 300 мм, а его практический диапазон взвешивания, например, 70-2000 кг. В подвесном кронштейне 18 имеется датчик 21 веса, с помощью которого пачка предварительно взвешивается. Функционально, вопрос представляет датчик, реагирующий на силу. Поскольку сила обусловлена взвешенной массой, используется термин датчик веса. Датчик веса может быть основан, например, на тензометрическом датчике, или альтернативно, например, на гидравлическом рабочем устройстве, предпочтительно комбинация гидравлического цилиндра и датчика давления или передатчика. Подвесной кронштейн также включает в себя один или более датчиков ускорения, измеряющих ускорение относительно одной или нескольких осей, например, в этом случае один двухосевой датчик 22 ускорения, который может быть использован для наблюдения за движениями погрузчика. Фактически известны простые весовые измерители погрузчики, которые предназначены для надежной работы только в статических условиях, при этом в весовых измерителях нет упомянутого ускорения или другой обратной связи.
Данные ускорения также могут быть использованы для регулировки весового измерителя погрузчика, когда движение пачки естественным образом, влияет на результат взвешивания. С помощью информации, полученной от датчиков ускорения, масса пачки в движении может быть скорректирована. В этом случае, можно использовать весь подъем для взвешивания пачки и таким образом получить более высокую точность. Оси обнаружения датчиков ускорения расположены под прямыми углами друг к другу, так что с помощью двух датчиков получается исчерпывающая информация о движении и положении в пространстве подвесного кронштейна. Естественно, также можно использовать устройство, измеряющее ускорение относительно трех осей, в котором датчики, измеряющие ускорение параллельно каждой оси могут быть отдельными или интегрированными для образования одной совокупности. В вычислительном блоке есть предпочтительно также необходимые подводы мощности и соединения передачи данных для работы различных компонентов. В этом случае есть CAN-шина 23 между подвесным кронштейном 18 и блоком 16 вычисления. В известном способе, передача данных может, при желании, также быть реализована полностью беспроводным способом. Это может быть преимуществом, когда данные должны передаваться в трудных условиях, например, в связи с комплектом стрел леснотехнической машины, которые могут быть легко повреждены внешними препятствиями.
Датчик 21 веса встроен в подвесной кронштейн 18 и может быть использован для измерения сил, как в продольном, так и в поперечном направлениях подвесного кронштейна 18. В статических ситуациях, когда форвардер находится на горизонтальной поверхности, продольное направление, по существу, параллельно гравитации и, по существу, на датчик веса действует прямое усилие, при условии, что пачка была захвачена центрально относительно своего центра тяжести. Когда форвардер находится на наклонной поверхности и/или с несбалансированной пачкой, наклонные силы, которые также могут быть измерены с помощью датчика веса, также действуют на подвесной кронштейн. Двухосевой датчик 22 ускорения расположен на электронной плате 24. На верхнем конце подвесного кронштейна 18 находится отверстие 25 для штифта, с помощью которого подвесной кронштейн 18 прикреплен к стреле. Соответственно, на нижнем конце находится второе отверстие 26 для штифта, с помощью которого подвесной кронштейн прикреплен к ротатору. Отверстия расположены под прямыми углами друг к другу, так что грейфер может качаться в двух направлениях. Другими словами, отверстия расположены поперек, таким образом, что верхний штифт позволяет движение параллельно стреле и нижней штифт позволяет боковое движение. Тот же датчик веса может быть использован для измерения сил, вызванных эксцентричной пачкой. В этом случае нижнее отверстие расположено в поперечном направлении упомянутому выше. Вышеизложенное описывает один пример варианта осуществления весового измерителя погрузчика. Однако сам способ также подходит для других видов систем взвешивания.
Фиг. 2 схематично показывает этапы 30-52 способа в соответствии с изобретением. Способ предназначен быть использованным для регулировки весового измерителя погрузчика, чтобы улучшить точность взвешивания погрузки. Когда до сих пор используют в качестве примера форвардер в соответствии с фиг. 1, способ начинается с погрузки стволов деревьев в грузовое пространство форвардера на этапе 30. Оператор использует грейфер, чтобы собрать одно дерево или, как правило, в случае лесоматериала для топлива, несколько тонких деревьев одновременно, и поднять деревья в загрузочное пространство. В этой связи, ссылка на одно дерево означает то же самое, что и использование термина бревно. Далее, название пачки будет использоваться для деревьев, которые находятся в грейфере одновременно и загружаются в загрузочное пространство. Масса mi каждой пачки взвешивается в процессе подъема на этапе 32. В связи с этим, субиндекс i относится к порядковому номеру пачки. На этапе 34, в связи со взвешиванием пачки, предпочтительно, вычисляется произведение массы mi каждой пачки и поправочного коэффициента Cj конкретного груза, данное произведение учитывает погрешность при взвешивании каждой пачки, поднятой в процессе погрузки. В связи с этим, в свою очередь, субиндекс j относится к порядковому номеру груза. Скорректированные массы mi_C пачек, умноженные на поправочный коэффициент записываются в памяти на этапе 36. Умножение на поправочный коэффициент Cj может также иметь место после того, как масса mi пачки была сохранена в памяти. На этапе 38, скорректированные значения mi_C масс mi всех пачек погрузки суммируются вместе, чтобы дать полную массу mK_kok_j погрузки груза, которая, как правило, стремиться быть как можно ближе к оптимальному максимальному весу единичной погрузки Kj каждого форвардера. Более конкретно, mK_kok_j равно m1C1+m2C1+m3C1+... +mnC1. Суммирование, предпочтительно, происходит в режиме реального времени, как выполняется погрузка. В связи с этим, термин груз относится к полной массе, состоящей из одной или, предпочтительно, нескольких пачек в грузовом пространстве форвардера.
Когда погрузка завершена, то есть, когда форвардер загружен как можно ближе к его оптимальному грузу, может быть сделано передвижение от участка погрузки к участку разгрузки на этапе 40. Передвижение от одного участка погрузки к другому может быть также сделано в процессе погрузки, а число стволов в форвардере может даже быть уменьшено, в этом случае значения масс исключенных стволов вычитаются из полной массы mK_kok_j погрузки. Система взвешивания может различать погрузку от разгрузки, например, на основе использования датчиков силы и ускорения, крана и ротатора, или, как правило, используя две или три данные и их сочетание. На этапе 42, после перемещения начинается разгрузка груза Kj, например, в стек. Предпочтительно, масса mi_P каждой пачки разгружаемой из груза Kj, взвешивается на этапе 44, и значение записывается в памяти на этапе 46. Из-за направления разгрузки взвешивание является, очень точным, взвешенные массы разгрузки, записываются соответственно в памяти. Действующий в Финляндии закон Измерения запрещает манипуляции в любом виде взвешиваний разгрузки, даже для повышения точности. Значения всех пачек mi_P разгрузки суммируются на этапе 48, чтобы дать полную массу mK_kok_j разгрузки груза Kj, которая очень хорошо соответствует действительной массе погруженного груза.
На этапе 50, предпочтительно, на основе вычисленной полной массы mK_kok_j погрузки и полной массы mP_kok_j разгрузки формируется опорное значение А, которое показывает насколько точным является взвешивание погрузки. Опорное значение А, предпочтительно, является относительным, т.е. оно может быть вычислено, например, с помощью следующего уравнения
т.е. вычитанием полной массы mK_kok_j погрузки из полной массы mP_kok_j разгрузки и деления этого на полную массу mP_kok_j разгрузки. Опорное значение, предпочтительно, является относительным, тогда как абсолютное опорное значение, например, разность между полными массами погрузки и разгрузки, зависит от величины груза. Если грузы остаются всегда с той же массой может быть использовано абсолютное опорное значение. На этапе 52, на основе опорного значения А из Cj для коэффициента коррекции вычисляется значение Cj+1, которое заменяет значение Cj поправочного коэффициента, используемого в части, касающейся погрузки груза Kj на этапе 54.
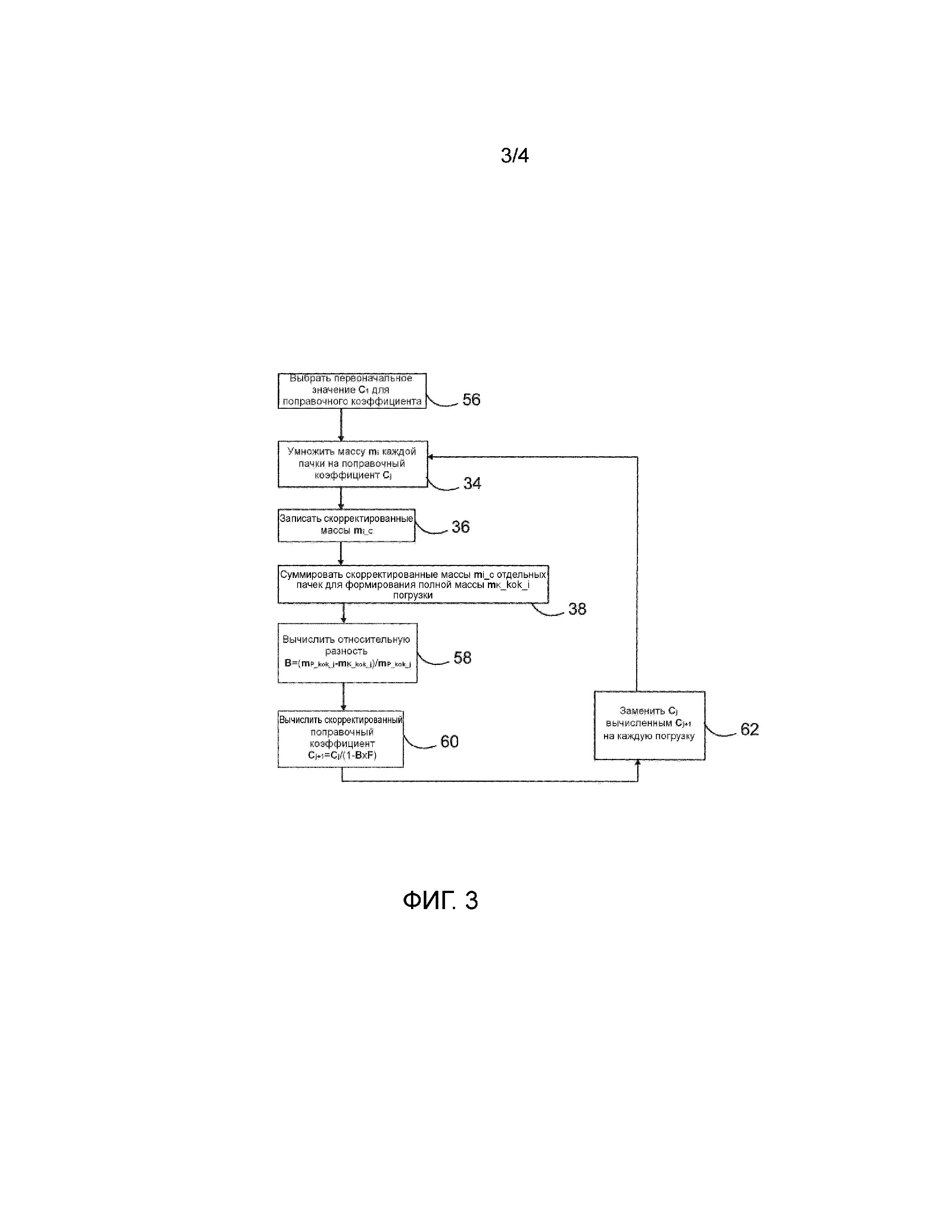
Рисунок 3 показывает более подробно вычисление поправочного коэффициента, в виде упрощенного алгоритма. В части, касающейся первого груза K1, или, как правило, когда некоторое важное условие, влияющее на погрузку меняется, для коррекции массы mi пачек погрузки используется первоначальный поправочный коэффициент C1. На этапе 56, выбирается некоторое начальное значение для начального поправочного коэффициента C1, которое может быть, например, нейтральным числом 1 или 0, которое сохраняет массы mi взвешенных пачек, какие они есть. Согласно одному варианту осуществления, первоначальным поправочным коэффициентом может быть также некоторое другое число, например 0,7, если будет установлено, что массы пачек, взвешенных при погрузке всегда больше, чем массы пачек, взвешенных вместе с разгрузкой. Итак на фиг. 2, первоначальный поправочный коэффициент C1 используется для умножения масс mi пачек при погрузке первого груза K1 на этапе 34. После этого скорректированные массы mi_C сохраняются в памяти на этапе 36, и суммируются для формирования полной массы mK_kok_j погрузки на этапе 38. После этого, на этапе 58 вычисляется относительное значение B разности по следующей формуле
В этом примере, относительное значение В разности используется в качестве опорного значения A, которое показано в варианте осуществления по фиг. 2. На этапе 60, используя относительное значение B разности, можно вычислить скорректированный поправочный коэффициент Cj+1, который получается из уравнения
в котором F является выбранным коэффициентом фильтрации, а Х обозначает обычное умножение, а не скрещенное произведение. Скорректированный поправочный коэффициент Cj+1 заменяет предыдущий поправочный коэффициент Cj на этапе 62. Первоначальный поправочный коэффициент C1 используется, чтобы скорректировать погрузку пачек первого груза K1. Поправочный коэффициент Cj+1, скорректированный с помощью предыдущего груза Kj, используется для последующих грузов Kj+1. Таким образом, вычисляется скорректированный поправочный коэффициент, который учитывает погрешность, возникающую при взвешивании погрузки предыдущего груза Kj. В результате, пачки взвешиваются более точно при погрузке следующего груза Kj+1. С помощью поправочного коэффициента Cj, в зависимости от опорного коэффициента А, можно сформировать схему настройки для обратной связи с поправочным коэффициентом Cj, которая полностью или почти полностью будет минимизировать погрешность взвешивания из-за неточности погрузки в пределах нескольких грузов, или даже непосредственно после одного груза.
В способе, согласно изобретению, чтобы вычислить скорректированный поправочный коэффициент Cj+1, при взвешивании опорного значения A, предпочтительно используется фильтрация. Фильтрация предназначена для уменьшения влияния отдельных погрузок на развитие поправочного коэффициента. В фильтрации, для определения коэффициента фильтрации могут использоваться отдельные различные варианты фильтрации. Коэффициент фильтрации F может быть, например, заданным процентом 50-90%, предпочтительно 65-75%, благодаря которому воздействие отдельной погрузки на коэффициент корректор следующей погрузки уменьшается. Использование коэффициента F фильтрации менее чем 50% невыгодно, так как в этом случае коррекция погрешности, возникающей при взвешивании погрузки путем регулировки взвешивания погрузки, будет медленной и потребуется нескольких грузов, чтобы сместить погрешность к достаточной точности. Использование коэффициента фильтрации сто процентов будет быстро исправлять погрешность взвешивания при погрузке, но может, в свою очередь привести к шуму в поправочном коэффициенте. Шум возникает, если погрешность отдельного груза отклоняется, по той или иной причине, от других предшествующих грузов, и в этом случае погрешность будет возрастать. Поправочный коэффициент будет тогда радикально изменяться в зависимости от предыдущего груза, хотя отдельный груз был исключением. Таким образом, большое количество шума приведет к погрешности в определении массы отдельного груза в направлении погрузки.
Согласно одному варианту осуществления, при фильтрации поправочного коэффициента используется фильтр скользящего среднего. Поправочный коэффициент может быть вычислен на основе, например, предыдущего груза, после которого принимается среднее значение поправочных коэффициентов, вычисленных на основе десяти предыдущих грузов. Это среднее значение может использоваться в качестве поправочного коэффициента следующего груза.
Согласно одному варианту осуществления, фильтр, используемый в способе, может быть адаптивным смарт-фильтром, алгоритмы которого настраивают параметры фильтра автоматически на основе, например, изменений, происходящих при погрузке, измерении, или точности измерения. С помощью такой реализации, можно обнаружить на раннем этапе изменение уровня или тенденцию, влияющую на поправочный коэффициент и, вызванные изменением в условиях, когда скорость реакции регулятора, и, таким образом, также коррекция погрешности может быть ускорена в период действия изменения условий.
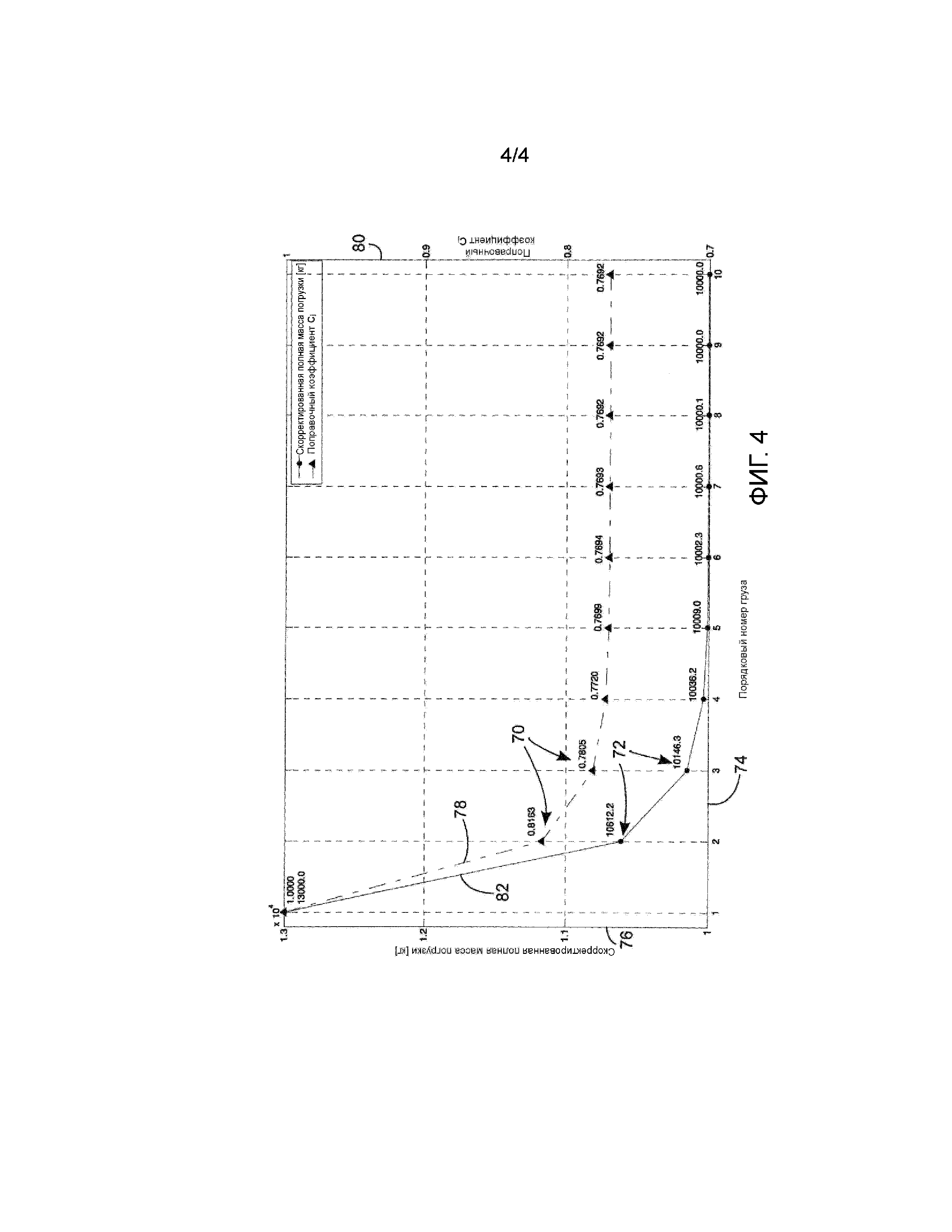
Фиг. 4 показывает пример графика поведения массы 76 пачки, взвешенной при погрузке груза и поправочного коэффициента 80, когда груз с той же действительной массой 10000 кг погружается и выгружается десять раз. Порядковый номер грузов показан ссылочной позицией 74 на горизонтальной оси. В этом примере, 1, которая представляет собой нейтральный номер при умножении масс груза, выбрана в качестве первоначального поправочного коэффициента C1. Следующим показан один пример способа, в котором изменение в поправочном коэффициенте может быть отфильтровано. 13000 кг получается в качестве полной массы mK_kok_j погрузки пачек погрузки груза K1. На графике, полная масса mK_kok_j погрузки различных грузов Kj отмечена ссылочной позицией 72, а значения поправочных коэффициентов Cj – ссылочной позицией 70. График 82 показывает развитие полных масс mK_kok_j погрузки между грузами Kj и график 78, в свою очередь - развитие поправочного коэффициента Cj. Так как действительная масса груза K1 - 10000 кг, 10000 кг также получены в виде полной массы mP_kok разгрузки. На основании этого, может быть вычислено относительное значение В разности, которое в этом случае равно (10000-13000)/10000, т.е. -0,3. Из этого, в свою очередь может быть вычислен скорректированный поправочный коэффициент C2 для второго груза K2, который равен 1/(1-[-0,3*0,75])=0,8163. Когда этот используется для вычисления произведения скорректированного поправочного коэффициента C2 и массы mi каждой пачки следующей погрузки K2, значение 13000*0,8163=10612,2 получается в качестве полной массы mK_kok_j погрузки второго груза K2. В примере графика, показанного на фиг. 4, тот же самый груз погружается и выгружается 10 раз. Пример вычисляется с использованием более точного, чем четырех знаков после запятой разрешения, показанного на фиг. 4, который приводит к изменению в массе, происходящему в грузах 8 и 9, несмотря на то, что приближенное значение поправочного коэффициента остается неизменным.
Коэффициент фильтрации, используемый в предыдущем примере равен 75%, так что после каждого груза погрешность снижается на 75%. Таким образом, полная масса mK_kok_j погрузки быстро приближается к полной массе mP_kok разгрузки и уже после пяти грузов достигает уровня погрешности менее одного promil. В то же время, значение поправочного коэффициента достигает конкретного значения индикации. Так как погрешность уменьшается на 75% после каждой погрузки, 25% погрешности, связанной с предыдущим грузом всегда остается в следующем грузе. Таким образом, погрешность никогда не исчезает полностью, но уменьшается до неизмеримо малой. При рассмотрении действительных грузов, условия погрузки могут значительно изменяться, так что умножение на поправочный коэффициент перед взвешиванием груза может до некоторой степени изменяться. Тем не менее, с помощью поправочного коэффициента Cj, полная масса mK_kok_j погрузки приводится относительно близко к полной массе mP_kok_j разгрузки.
Согласно другому варианту осуществления, для фильтрации используется фильтрация скользящего среднего значения, отличающаяся от фильтрации, описанной в предыдущем абзаце. В этом случае отдельное опорное значение не умножается на коэффициент фильтрации, а скорее новый скорректированный поправочный коэффициент, вычисленный с использованием 100-% фильтрации, умножается на коэффициент взвешивания. Нефильтрованный поправочный коэффициент Cj нефильтрованный, вычисленный на основе самого последнего груза, вычисляется по формуле Cj/(1-В). Новый фильтрованный поправочный коэффициент Cj+1 вычисляется с использованием среднего значения взвешенного поправочного коэффициента, вычисленного на основе предыдущего поправочного коэффициента и самого последнего груза, используя следующее уравнение (pk_previous*Cj+pk_unfiltered*Cj_unfiltered)/(pk_previous+pk_unfiltered), в котором pk_previous и pk_unfiltered являются коэффициентами взвешивания. Значение 0,25 может затем быть использовано в качестве коэффициента pk_previous взвешивания, а значение 0,75 может быть использовано в качестве коэффициента pk_unfiltered взвешивания. Чем больше относительный коэффициент взвешивания, чем данный для поправочного коэффициента, вычисленного на основе самого последнего груза, тем быстрее новый поправочный коэффициент будет соответствовать изменениям в условиях. С другой стороны, очень большое относительное значение взвешивания поправочного коэффициента последнего груза может вызвать шум поправочного коэффициента, если по какой-то причине условия значительно различаются между грузами. Если коэффициент взвешивания поправочного коэффициента самого последнего груза делится на коэффициент взвешивания предыдущего поправочного коэффициента, полученное таким образом отношение может быть, например, в диапазоне от 0,1-10, предпочтительно в диапазоне 1-3.
Система взвешивания предпочтительно работает в зависимости от условий. Это означает, что система взвешивания учитывает изменения в условиях взвешивания, т.е., например, кто водитель машины, и какой сорт лесоматериала загружается в это время. Кроме того, система взвешивания предпочтительно учитывает, произошли ли с момента предыдущего взвешивания изменения в машине, используемой для погрузки, то есть в подъемной стреле или грейфере и какой тип лесоматериала загружается. Например, при загрузке лесоматериала для топлива форма погружаемой пачки может очень отличаться от той, что при загрузке бревен. В этом случае можно использовать, в качестве первоначального поправочного коэффициента погрузки, самый последний поправочный коэффициент, вычисленный на основе погрузок, проделанных оператором обсуждаемых лесоматериалов, сортов изделий и записанный в системе взвешивания. При изменении условий, вычисление поправочного коэффициента всегда может быть начато либо из первоначального поправочного коэффициента, либо из самого последнего поправочного коэффициента предыдущего взвешивания.
Хотя масса погрузки весьма быстро делается точной посредством способа в соответствии с изобретением, надежность взвешивания погрузки может быть проверена с помощью такого известного контрольного веса как пачка. Контрольным весом может быть, например, трехметровая стальная труба, которая полностью залита бетоном или другим материалом, чтобы достичь желаемой массы. Сам по себе такой размер и масса контрольного веса не имеет большого значения, поскольку масса известна точно и может быть принята, чтобы быть распределенной равномерно внутри контрольного веса. Контрольное взвешивание проводится в таком случае только в статике, так что весовой измеритель погрузчик приводится теоретически к правильному диапазону измерений и, например, могут быть обнаружены погрешности из-за неисправностей устройства. Предпочтительно, используется точность более высокая, чем требуемая точность системы взвешивания и контрольное взвешивание выполняется также, когда контрольный вес наклонен. Наклон достигается захватом контрольного веса эксцентрично, таким образом, что контрольный вес устраивается в наклонной позиции с одним концом контрольного веса ниже другого. Иными словами, верхние и нижние штифты подвесного кронштейна допускают наклон пачки в позицию, соответствующую состоянию равновесия. В статическом контрольном весе, требуется точность, например, ±2%. Время от времени, например, раз в неделю, значения контрольного взвешивания записываются и применяются в способе согласно изобретению.
При использовании системы взвешивания в соответствии с изобретением, экономия времени в течение контрольного взвешивания, в соответствии с предшествующим уровнем техники, легко достигает более двух часов в неделю, если ранее контрольный вес использовался один раз в день, а контрольное взвешивание занимало около получаса. В то же время, точность весового измерителя погрузчика при загрузке существенно улучшается.
При использовании системы взвешивания в соответствии с изобретением, несколько различных факторов, вызывающих погрешности могут быть устранены путем сравнения различий между погрузкой и разгрузкой отдельного груза. Погрешности возникают на этапе погрузки, при которой часто есть значительное изменение в отношении к различным переменным. Этап разгрузки груза, однако, часто вполне постоянный и идентичный между различными грузами, так что точность разгрузки остается хорошей. Как правило, требуемая точность взвешивания в направлении разгрузки составляет порядка ±4%.
Технически, система взвешивания способна определить направление разгрузки без участия оператора, когда сенсорные средства, наблюдающие угол поворота, установлены в весовом измерителе погрузчике, например, в погрузчике или когда установлены в погрузчике или кране, например, в своем устройстве поворота. Таким образом, зондирование весового измерителя погрузчика уведомляет систему взвешивания об угле поворота в любое время. С другой стороны, перемещения погрузчика можно контролировать достаточно точно для этой цели также без отдельного зондирования, если операции погрузчика контролируются, в частности, управлением его устройством вращения в процессе работы.
Устройство согласно изобретению также может быть использовано, чтобы контролировать работу форвардеров. Блок вычисления может записывать полные массы всех отдельных грузов в своей памяти, чтобы они могли быть рассмотрены позже. Это позволяет, например, также контролировать перегрузки впоследствии, если в форвардере возникает неисправность.
В связи с этим, машиной для погрузки-разгрузки материалов в соответствии с изобретением может быть любое устройство, так или иначе подходящее для применения идеи изобретения, которое может быть использовано для взвешивания пачек как и при погрузке так и при разгрузке. Машиной для погрузки-разгрузки материалов может быть, например, мусорный кран или аналогичный ему.
Устройство гусеничного полотна и лесохозяйственная машина
Способ проверочного взвешивания во взвешивающей системе, программный продукт, устройство проверочного взвешивания во взвешивающей системе и транспортно-загрузочное оборудование
Рама и устройство для транспортного средства или машины
Стреловая конструкция
Стабилизация лесозаготовительной машины
Нож для очистки деревьев от ветвей для лесотехнической машины
Устройство в лесотехнической машине и лесотехническая машина, оборудованная соответствующим устройством
Способ и устройство управления лесотехнической машиной
Кран
Детекторный узел для передвижной рабочей установки
Стабилизация лесозаготовительной машины
Детекторный узел для передвижной рабочей установки

