Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ КАВИТАЦИИ/КИПЕНИЯ В ИЛИ ОКОЛО КЛАПАНА УПРАВЛЕНИЯ ПРОЦЕССОМ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к способам и устройству для обнаружения и контроля кавитации в жидкостях в устройстве регулирования потока, таком как регулирующий клапан или труба, или рядом с ним.
УРОВЕНЬ ТЕХНИКИ
[0002] Кавитация в потоке жидкости возникает, когда гидростатическое давление жидкости падает ниже давления ее насыщенного пара в управляемом потоке текучей среды, например, в трубе или регулирующем клапане и в потоке образуются пузырьки газа. Затем, когда гидростатическое давление возвращается к уровню выше давления насыщенного пара, пузырьки газа сжимаются и резко схлопываются в процессе, который порождает акустическую волну значительной энергии. Иногда образование начальных пузырьков газа называется "кипение", тогда как схлопывание пузырьков газа называется "кавитация". Однако в целях этого описания термин "кавитация" далее используется так, чтобы охватывать весь процесс как образования, так и схлопывания пузырьков газа, если четко не указано иное.
[0003] Регулирующие клапаны часто имеют по меньшей мере одну область уменьшенного поперечного сечения потока, приблизительно между впускным отверстием в корпус клапана и выпускным отверстием из корпуса клапана. Одна типичная область уменьшенного поперечного сечения потока находится в проходе, образованном седлом клапана, или возле него и/или вблизи затвора клапана. Таким образом, текучая среда, протекающая через регулирующий клапан, обычно испытывает некоторый уровень перепада давления или потери давления при ее прохождении через уменьшенное поперечное сечение потока. Как правило, давление будет иметь наименьшее значение где-то внутри корпуса регулирующего клапана или сразу за ним, перед увеличением до некоторой степени. В некоторых случаях эти условия пониженного давления могут вызывать кавитацию в регулирующем клапане между затвором клапана и выпускным отверстием и/или в трубе сразу рядом с выпускным отверстием.
[0004] Кавитация в потоке жидкости, проходящей через регулирующий клапан, может вызывать проблемы. Кавитация внутри регулирующего клапана или рядом с его физическими границами может наносить серьезное физическое повреждение регулирующему клапану или примыкающим трубным компонентам. Например, кавитация на внутренней поверхности стенки канала для потока, проходящего через корпус клапана, затворе клапана или рядом с ними может вызывать повреждение поверхности на границе перепада давления, затвора клапана или других компонентов клапана. Повреждение, как правило, накапливается со временем, так что с целью ремонта повреждения компонентов регулирующего клапана, вызванного кавитацией, необходимо проводить его периодическое техническое обслуживание. При планировании технического обслуживания на многих линиях производственного процесса желательно иметь возможность точно спрогнозировать, когда конкретный клапан или другая деталь оборудования потребует ремонта, вплоть до замены, прежде чем технологическая линия остановится и будет в открытом состоянии.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В системе и устройстве в соответствии с некоторыми аспектами предусмотрен датчик акустической эмиссии для обнаружения наличия кавитации внутри и/или вблизи устройства регулирования потока, такого как регулирующий клапан, за счет восприятия акустических сигналов. Датчик акустической эмиссии представляет собой электронный датчик, предназначенный для восприятия акустической энергии, проходящей через твердый материал. В некоторых вариантах электронный датчик представляет собой пьезокерамический или другой пьезоэлектрический датчик акустической эмиссии, емкостной датчик акустической эмиссии, лазерный интерферометрический датчик акустической эмиссии и/или другие эквивалентные типы электронного датчика акустической эмиссии. Предпочтительно, датчик акустической эмиссии располагается на внешней поверхности устройства регулирования потока. С датчиком акустической эмиссии функционально соединен процессор. Указанный процессор сконфигурирован для приема акустической информации от датчика и обработки этой акустической информации для определения и/или контроля кавитации в устройстве регулирования потока.
[0006] В соответствии с некоторыми аспектами способы обнаружения и/или контроля кавитации внутри устройства регулирования потока включают сбор данных нестационарной акустической энергии с помощью датчика акустической эмиссии, фильтрование данных для выбора акустической информации, соответствующей кавитационным событиям, и определения уровней кавитации на основании по меньшей мере частично одного или более из следующего: частоты кавитационных событий и интенсивности отдельных кавитационных событий.
[0007] В соответствии с некоторыми аспектами кавитация может быть отслежена с течением времени. Уровни кавитации могут быть использованы для определения накопления кавитации внутри устройства регулирования потока с течением времени. Это накопление может быть полезно для определения того, когда должно быть проведено техническое обслуживание устройства регулирования потока. Процессор может вычислять степень повреждения на основании накопления кавитации с течением времени. Степень повреждения может использоваться для определения и/или прогнозирования того, когда устройство регулирования потока потребует технического обслуживания с целью ремонта компонентов, которые повреждены накопленным возникновением кавитации с течением времени.
[0008] В соответствии с некоторыми аспектами уровни кавитации могут быть отслежены и определены их тенденции для определения того, увеличиваются ли значительно кавитационные уровни. Информация о тенденции может быть использована для определения и/или прогнозирования того, когда клапан потребует технического обслуживания с целью ремонта компонентов клапана, поврежденных кавитацией. Информация о тенденции может быть использована для подачи предупредительных сигналов оператору, например, предлагающих изменить рабочие условия регулирующего клапана.
[0009] В соответствии с некоторыми аспектами информация, относящаяся к положению регулирующего поток элемента в регулирующем клапане, может быть использована для определения потенциальных проблемных рабочих условий. Информация о положении может быть получена, например, от устройства позиционирования. Информация о положении может быть скоррелирована с предполагаемыми уровнями кавитации при условиях нормального потока для одного или более заданных положений. Предполагаемый уровень кавитации может быть сопоставлен с фактическим уровнем кавитации. Значительное отклонение фактического уровня кавитации от предполагаемого уровня кавитации может указывать на то, что существует проблема. Чтобы указать на то, что дальнейшая диагностика может быть целесообразной, может быть сгенерирован предупредительный сигнал.
[0010] В одном приведенном в качестве примера варианте реализации в соответствии с идеями настоящего изобретения устройство для восприятия кавитации в текучей среде, протекающей через устройство регулирования потока, содержит датчик акустической эмиссии и процессор. Упомянутый датчик акустической эмиссии сконфигурирован для размещения вдоль пути регулируемого потока текучей среды, проходящего через корпус устройства регулирования потока, в выбранном месте, таком как место, вероятно, подверженное кавитации, или рядом с ним. Датчик акустической эмиссии предназначен для обнаружения акустических сигналов, создаваемых при кавитации в пути потока текучей среды. Предпочтительным является определение и захват акустических сигналов как отдельных и дискретных проявлений нестационарной упругой волны. Датчик акустической эмиссии выполнен с возможностью передачи в процессор акустической информации, основанной на обнаруженных в пути потока текучей среды акустических сигналах, например, с помощью сигналов, представляющих интенсивность акустических сигналов. Процессор функционально соединен с датчиком акустической эмиссии, чтобы получать акустическую информацию. Процессор настроен на обработку акустической информации и контроль уровней кавитации в пути потока текучей среды на основании по меньшей мере частично частоты кавитационных событий и интенсивности отдельных кавитационных событий, извлеченных из акустической информации.
[0011] В другом приведенном в качестве примера варианте реализации в соответствии с идеями настоящего изобретения раскрыт способ контроля уровней кавитации в устройстве регулирования потока для технологических жидкостей. Датчик акустической эмиссии прикреплен к наружной стенке устройства регулирования потока, при этом процессор функционально соединен с датчиком акустической эмиссии, чтобы принимать сигналы акустической эмиссии, представляющие данные нестационарной акустической энергии, воспринятые в пути потока текучей среды датчиком акустической эмиссии. Этот способ включает получение процессором по меньшей мере одного сигнала от датчика акустической эмиссии; определение того, соответствует ли полученный сигнал кавитационному событию, имеющему заданные характеристики; регистрацию процессором выбранных характеристик полученного сигнала, только если полученные сигналы созданы благодаря кавитационному событию; и определение уровня кавитации на основании частоты кавитационных событий и интенсивности каждого кавитационного события.
[0012] В другом приведенном в качестве примера варианте реализации в соответствии с идеями настоящего изобретения раскрыт способ контроля оценки повреждения устройства регулирования потока для технологических жидкостей, причиненного кавитацией. Этот способ включает получение сигналов от датчика акустической эмиссии цифровым сигнальным процессором. Полученные сигналы соответствуют данным нестационарной акустической эмиссии в пределах заданного диапазона частот. Выбранные характеристики полученных сигналов регистрируются цифровым сигнальным процессором, только если полученные сигналы созданы в результате кавитационного события, при этом акустические сигналы и/или полученные сигналы находятся в пределах заданного диапазона частот. Предпочтительно, один или более фильтров сконфигурированы для фильтрации акустических сигналов и/или полученных сигналов для ослабления заданных нежелательных частот выше и/или ниже предварительно выбранных верхнего и нижнего пределов частот. Эта фильтрация может происходить на одном или более уровнях, в том числе в самом датчике акустической эмиссии, в фильтрующем аппаратном обеспечении, функционально установленном между датчиком акустической эмиссии и цифровым сигнальным процессором, и/или с помощью подпрограмм фильтрующего программного обеспечения. Вычисляется частота обнаружения, включающая количество кавитационных событий, которые происходят в определенный период времени. Вычисляется интенсивность каждого кавитационного события, при этом интенсивность основана на единице энергии на одно кавитационное событие. Уровень кавитации определяется на основании частоты обнаружения и интенсивности. Отслеживается количество превышений уровнем кавитации заданного порога, в соответствии с чем может контролироваться оценка накопленного повреждения, полученного устройством регулирования потока, обусловленного кавитацией.
[0013] В еще одном приведенном в качестве примера варианте реализации в соответствии с идеями настоящего изобретения способ контроля того, растут ли уровни кавитации в устройстве регулирования потока для технологических жидкостей, включает вычисление тенденции частот обнаружения и интенсивностей относительно времени, и генерирование предупредительного сигнала о том, что уровни кавитации растут, если тенденция указывает на то, что частоты обнаружения и интенсивности растут с течением времени.
[0014] В соответствии с некоторыми аспектами и формами, расположение и соединение физических компонентов системы предоставляет определенные преимущества в отрыве от любого компьютерного программирования и аспектов способа системы. Подобным образом, в других аспектах и формах, компьютерное программирование и/или способы, реализующие различные аспекты процессов, описанных в данном документе, предоставляют определенные преимущества в отрыве от некоторых или всех конкретных физических компонентов системы.
[0015] Другие осуществимые аспекты и необязательные формы системы, устройства и способов, раскрытых в данном документе, соответствующие любому одному или более зависимым пунктам формулы изобретения и следующему описанию, будут очевидны при рассмотрении последующего подробного описания и прилагаемых графических материалов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
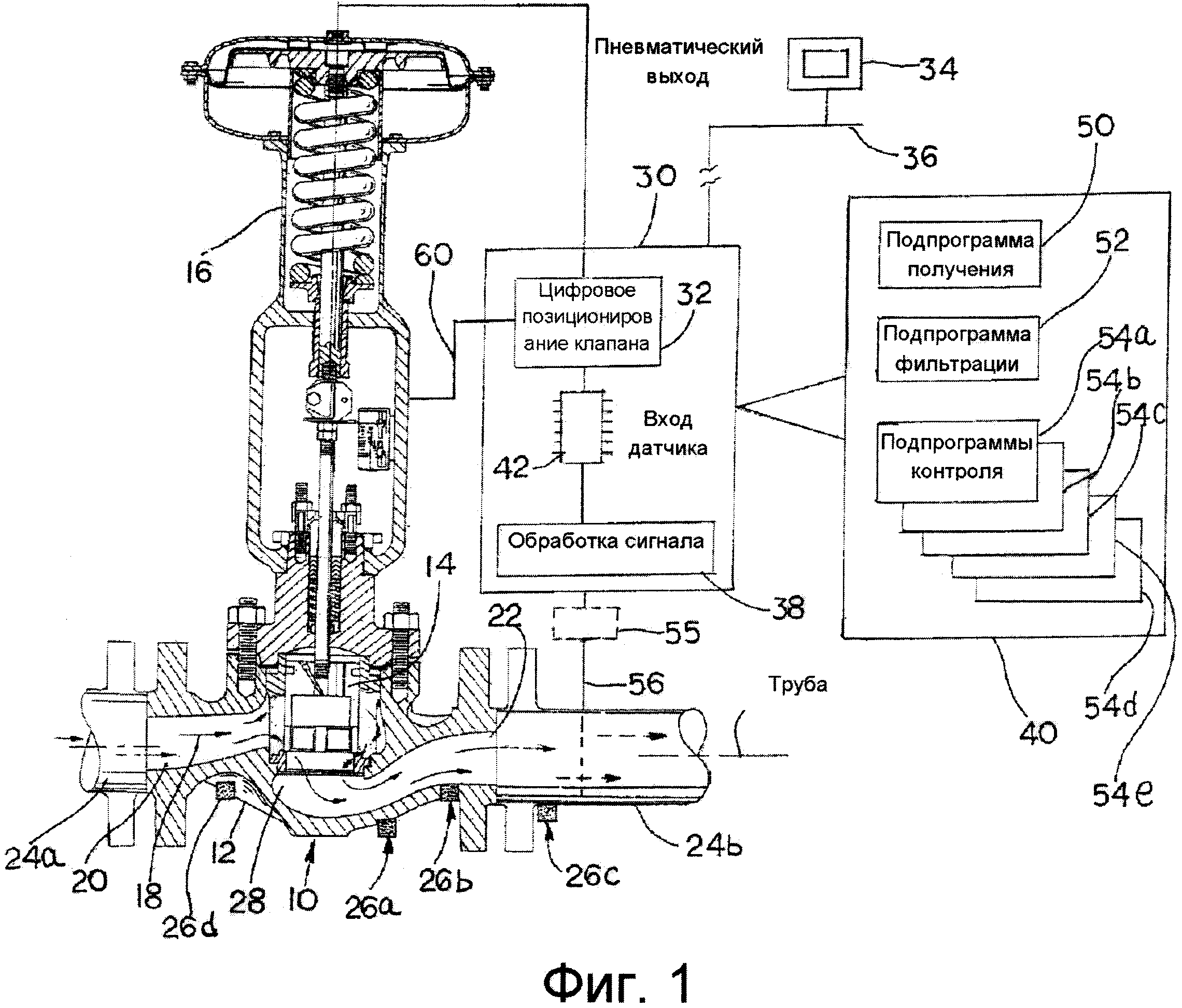
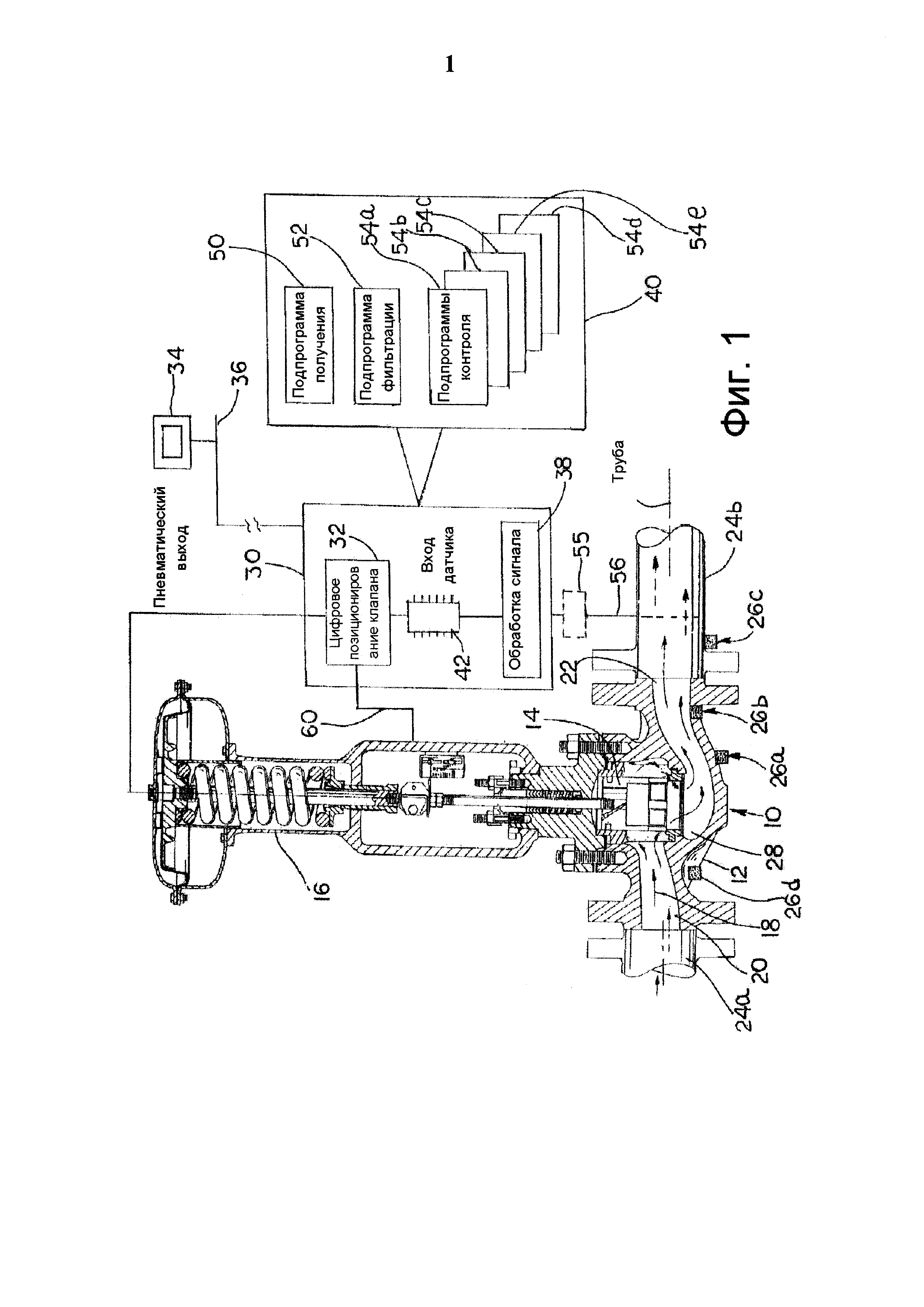
[0016] На фиг. 1 проиллюстрирован вид с частичным поперечным разрезом регулирующего клапана в линии управления технологическим процессом, включающий схематическое иллюстрирование системы для восприятия кавитации в текучей среде, протекающей через регулирующий клапан.
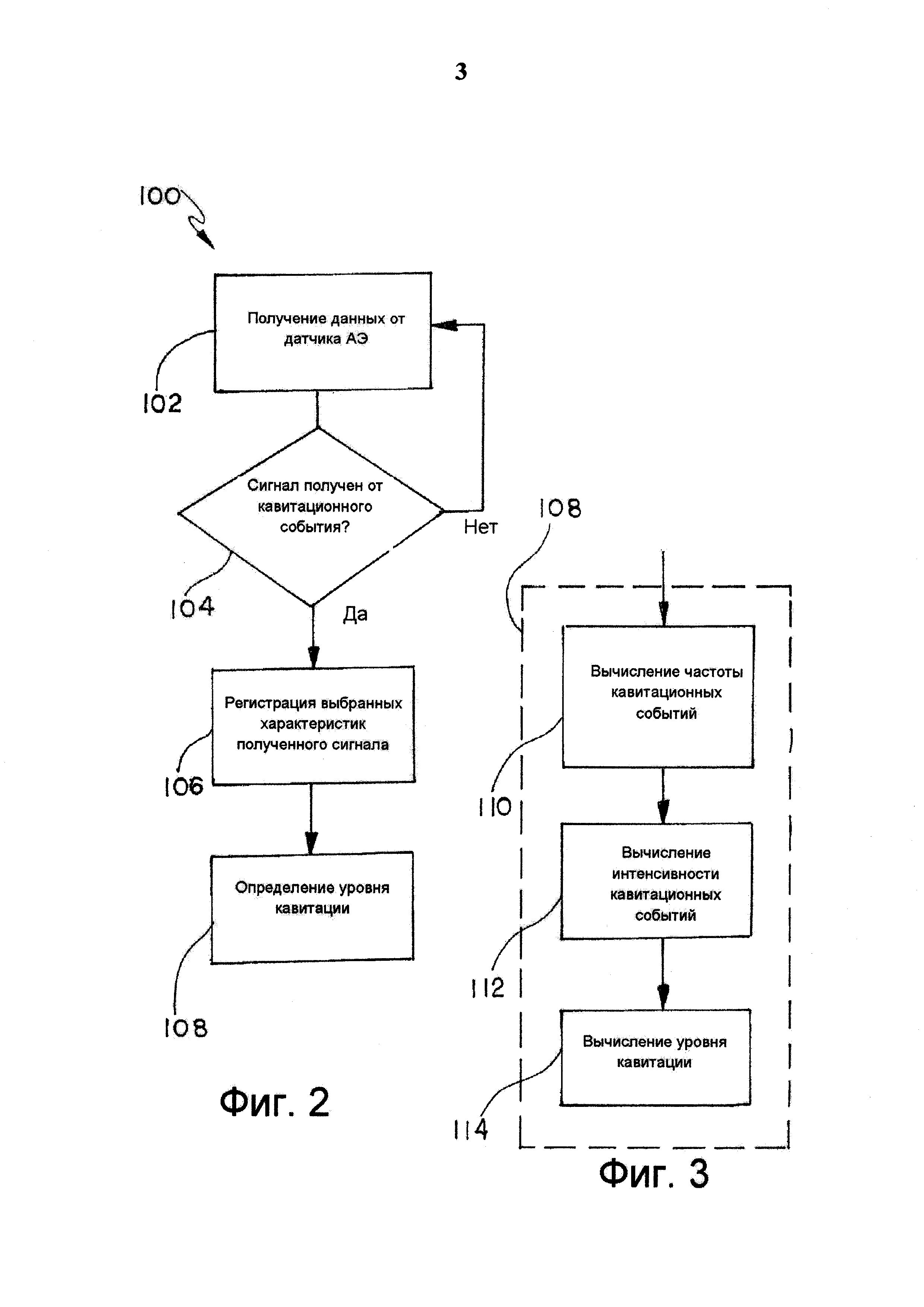
[0017] На фиг. 2 проиллюстрирована логическая блок-схема способа контроля кавитации в устройстве регулирования потока, который может быть реализован с применением системы, проиллюстрированной на фиг. 1.
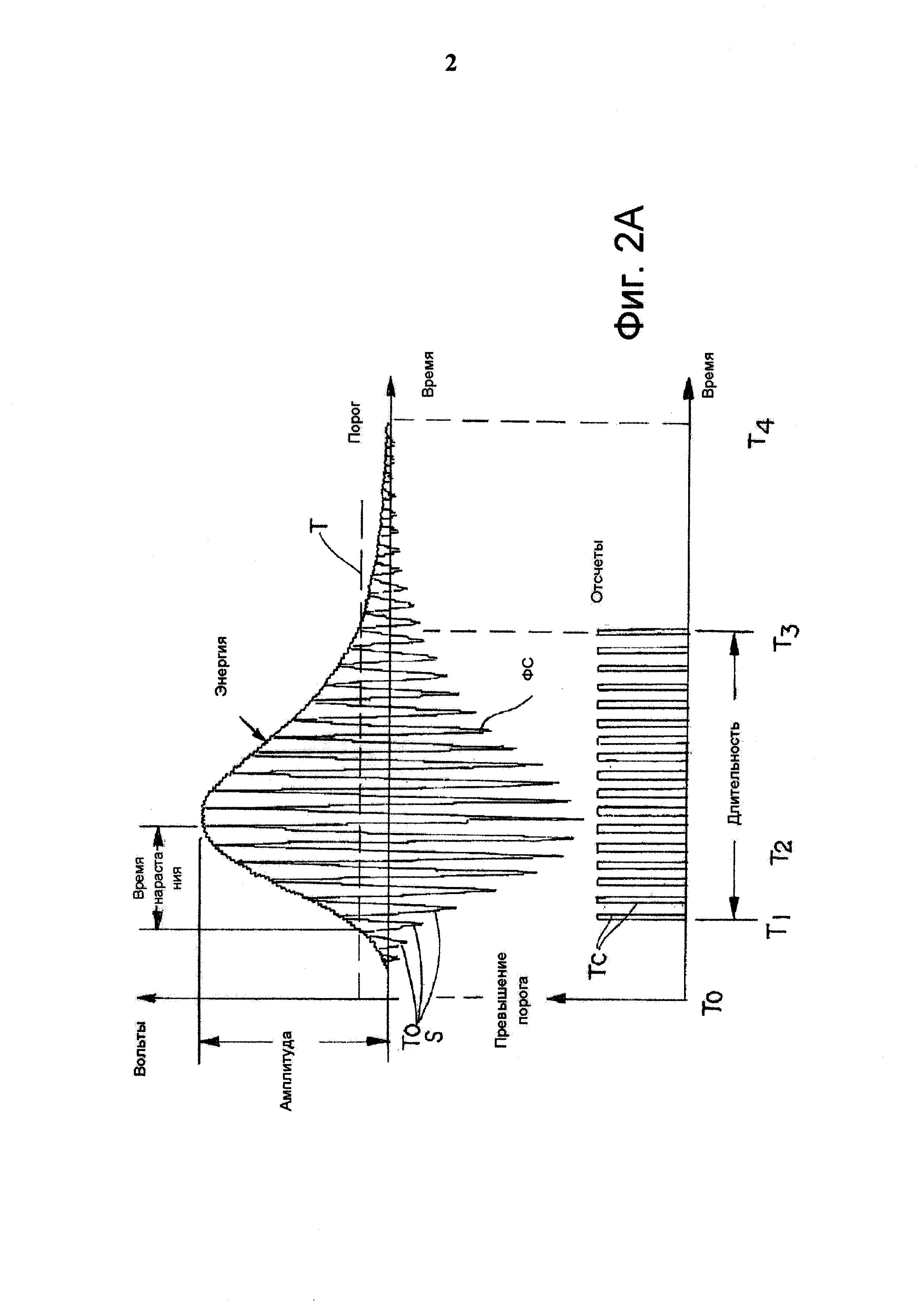
[0018] На фиг. 2А проиллюстрирована пара сопоставленных графиков, на которых нанесены амплитуда и пересечения порогового значения для ряда сигналов акустической эмиссии в течение идеализированного периода кавитационного потока.
[0019] На фиг. 3 проиллюстрирована подробная логическая блок-схема этапа, проиллюстрированного на фиг. 2.
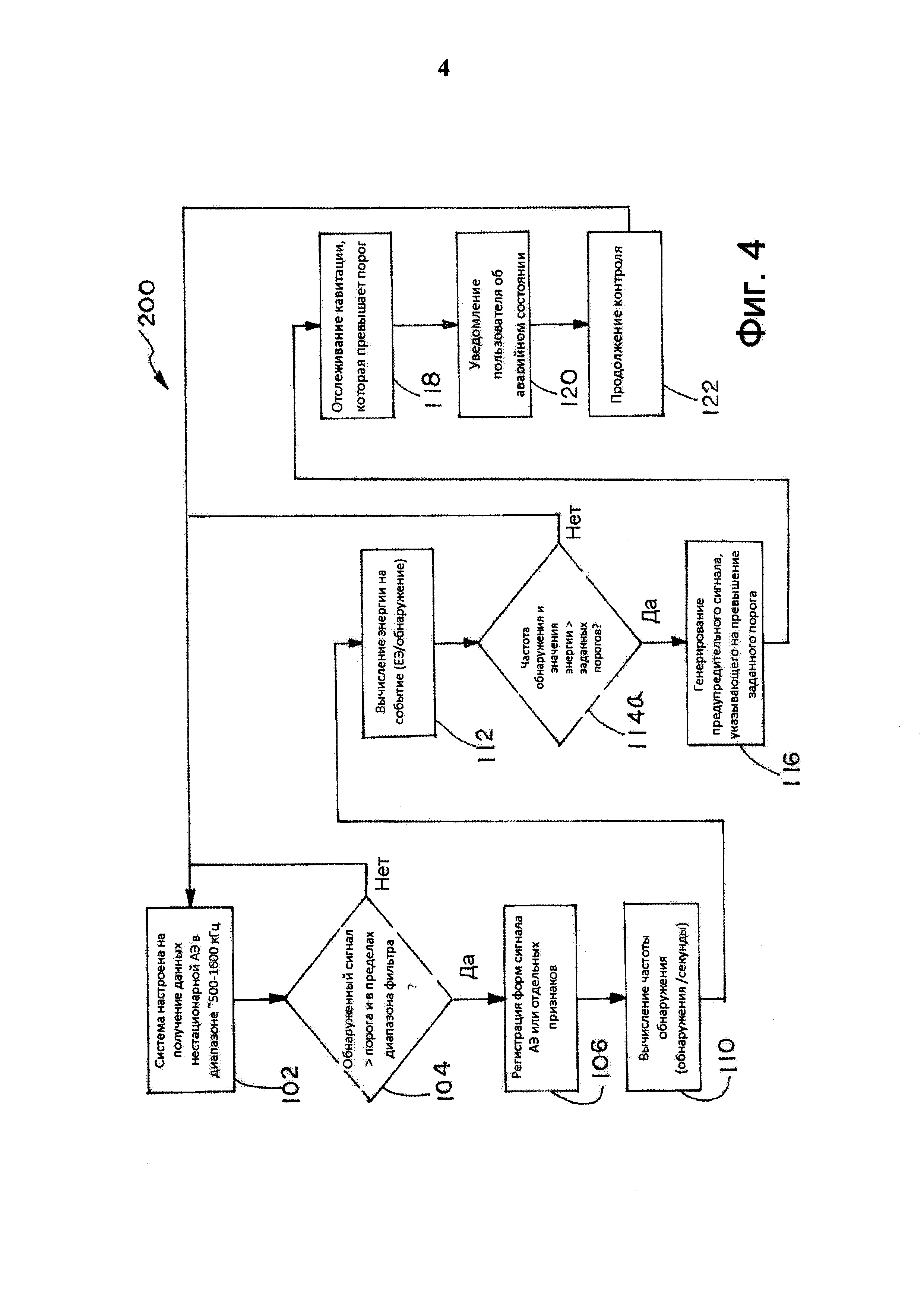
[0020] На фиг. 4 проиллюстрирована логическая блок-схема другого способа контроля кавитации в устройстве регулирования потока, который может быть реализован с применением системы, проиллюстрированной на фиг. 1.
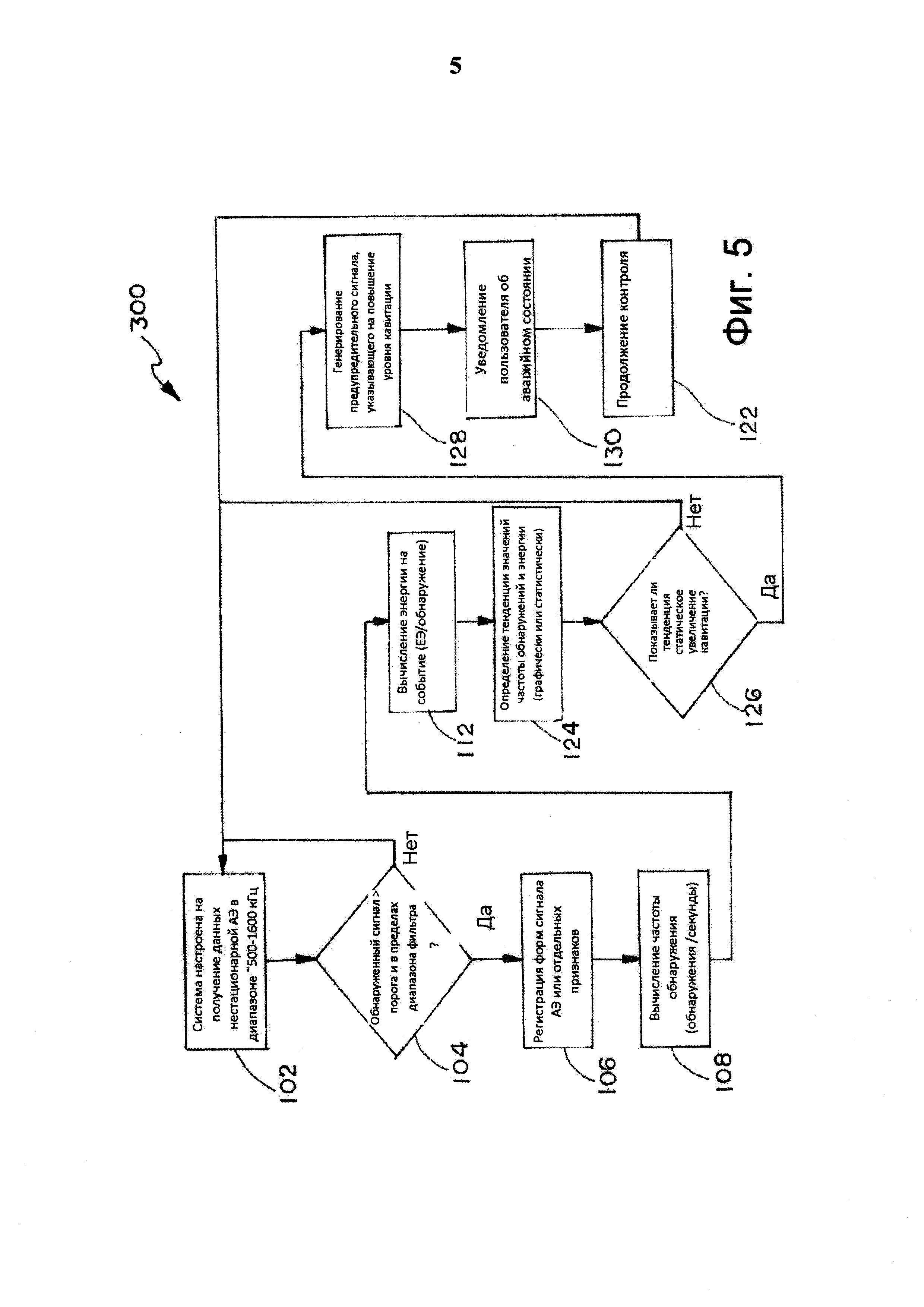
[0021] На фиг. 5 проиллюстрирована логическая блок-схема еще одного способа контроля кавитации в устройстве регулирования потока, который может быть реализован с применением системы, проиллюстрированной на фиг. 1.
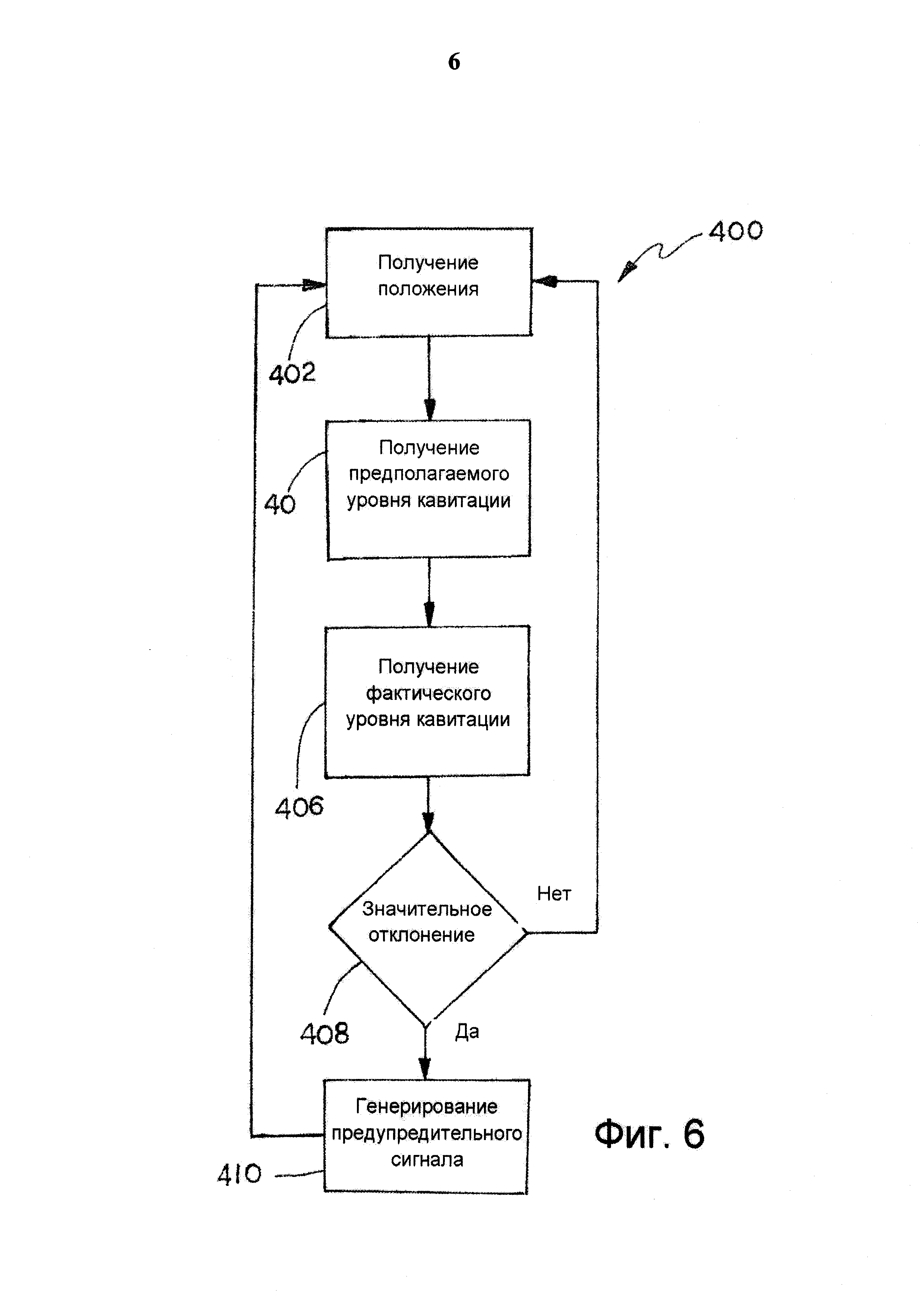
[0022] На фиг. 6 проиллюстрирована логическая блок-схема еще одного способа контроля кавитации в устройстве регулирования потока, который может быть реализован с применением системы, проиллюстрированной на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0023] Теперь обратимся к чертежам, где на фиг. 1 проиллюстрирована система 8 и устройство для восприятия и/или контроля кавитации в жидкости, протекающей через регулирующий клапан 10 или другое устройство регулирования потока в соответствии с идеями настоящего изобретения. Указанная система 8 содержит устройство регулирования потока, такое как регулирующий клапан 10 и/или трубы 24а и 24b, один или более датчиков акустической эмиссии, таких как датчики акустической эмиссии 26a-d, и автоматизированный процессор, такой как процессор 30. Система 8 может представлять собой часть большей установки управления технологическим процессом, такой как нефтеперерабатывающая установка или установка для химической переработки, как понятно в данной области техники. Например, система 8 может быть внедрена в автоматизированную систему управления для установки управления технологическим процессом, такую как система, подробно описанная в патенте США №6954713, который полностью включен в данный документ посредством ссылки. Система 8 воспринимает акустические сигналы в потоке текучей среды, такие как акустические сигналы, генерируемые благодаря кавитации в регулирующем клапане 10 или рядом с ним, и определяет состояние кавитационного потока на основании акустических сигналов. Акустические сигналы могут включать данные нестационарной акустической энергии, обусловленные образованием пузырьков газа и/или последующим схлопыванием пузырьков газа как части кавитации. Состояние кавитационного потока может быть определено по наличию кавитационных событий, которые имеют предварительно выбранные характеристики. Предпочтительно, система 8 контролирует уровень кавитации на основании частоты кавитационных событий и/или интенсивности отдельных кавитационных событий. Система 8 может выдавать отчет об состоянии кавитационного потока в определенной жидкости. Этот отчет может быть выдан оператору и/или в контроллер для регулирующего клапана 10. В некоторых вариантах реализации система 8 отслеживает накопление кавитации с течением времени, что может быть использовано для прогнозирования того, когда должно быть запланировано техническое обслуживание регулирующего клапана 10. В некоторых вариантах реализации система 8 контролирует изменения в уровне кавитации, что может быть использовано для подачи предупредительного сигнала в случае статистически значимых изменений уровня кавитации. В некоторых вариантах реализации уровень кавитации может быть скоррелирован с положением регулирующего клапана для определения потенциально проблемных рабочих состояний. Несмотря на то что пример, проиллюстрированный на графических материалах, относится конкретно к регулирующему клапану 10, система 8 и устройство и способы могут быть направлены на контроль кавитации в других типах устройств регулирования потока для технологических жидкостей, таких как трубы и редукторы, подобно тому, как описано в отношении приведенного в качестве примера регулирующего клапана 10.
[0024] Регулирующий клапан 10 содержит корпус 12 клапана, регулирующий поток элемент 14 и приводной механизм 16. Путь 18 потока текучей среды проходит через корпус 12 клапана. Путь 18 потока текучей среды проходит по меньшей мере частично от впускного отверстия 20 в корпус 12 клапана, через проходное отверстие 28, в выпускное отверстие 22 из корпуса 12 клапана. Путь 18 потока текучей среды также может быть образован по меньшей мере частично трубой 24а, соединенной с впускным отверстием 20, и/или трубой 24b, соединенной с выпускным отверстием 22. Дополнительные компоненты регулирующего клапана 10 хорошо известны и в данном документе не объясняются более подробно в целях краткости.
[0025] Один или более из датчиков акустической эмиссии 26а, 26b, 26с и 26d располагаются вдоль пути 18 потока текучей среды. Кавитационные события, которые воздействуют на внутреннюю поверхность корпуса 12 клапана или места рядом с ней, передаются через корпус клапана в один или более из датчиков акустической эмиссии 26a-d. Датчики акустической эмиссии 26a-d обнаруживают акустические сигналы и создают акустическую информацию, представляющую обнаруженные акустические сигналы. Акустические сигналы, воспринятые датчиками акустической эмиссии, могут включать, например, вибрации и шум, вызванные схлопыванием пузырьков в текучей среде во время кавитации. Акустические сигналы также могут включать энергию, высвобожденную в корпусе 12 клапана при схлопывании пузырьков достаточно близко к внутренней стенке корпуса клапана, чтобы наносить небольшое повреждение корпусу клапана. Предпочтительно, датчики акустической эмиссии 26a-d определяют и захватывают акустические сигналы как отдельные и дискретные появления нестационарной упругой энергетической волны. Как известно в данной области техники, упругая энергетическая волна представляет собой акустическую энергетическую волну, которая распространяется по твердому телу, в отличие от акустической энергетической волны, которая распространяется по воздуху или жидкости. Акустическая информация, передаваемая датчиками акустической эмиссии 26a-d, предпочтительно представлена в форме сигналов, таких как электронные сигналы акустической эмиссии, генерируемые в ответ на воспринятые акустические сигналы. Датчики акустической эмиссии 26a-d предпочтительно являются пьезоэлектрическими датчиками, такими как пьезокерамические датчики, и могут представлять собой высокочастотные пьезокерамические датчики, такие как датчики акустической эмиссии VS900-RIC, поставляемые компанией Vallen Systeme GmbH, расположенной в Иккинге, Германия, хотя могут быть использованы и другие высокочастотные датчики акустической эмиссии. В некоторых вариантах реализации один или более из датчиков акустической эмиссии дополнительно или альтернативно могут включать емкостные датчики акустической эмиссии, лазерные интерферометрические датчики акустической эмиссии и/или другие типы электронных датчиков акустической эмиссии, способных обнаруживать и принимать акустические сигналы, созданные в результате кавитации внутри регулирующего клапана 10 или рядом с ним.
[0026] Система 8 не обязательно содержит каждый или все из датчиков акустической эмиссии 26a-d во всех вариантах реализации; однако предпочтительно, чтобы по меньшей мере один из датчиков акустической эмиссии 26a-d был предусмотрен для получения акустических сигнал, вызванных кавитацией. В приведенном в качестве примера варианте реализации, проиллюстрированном на фиг. 1, каждый из датчиков акустической эмиссии 26a-d расположен в одном или нескольких выбранных местах, которые могут быть выбраны на основании вероятности возникновения кавитация, вызванной регулирующим клапаном 10. Датчики акустической эмиссии 26a-d предназначены для обнаружения акустических сигналов, исходящих от текучей среды, протекающей вдоль пути 18 потока текучей среды, и проходящих в виде упругих волн через один или более твердых компонентов регулирующего клапана 10, таких как стенка корпуса 12 клапана.
[0027] Датчики акустической эмиссии 26а-с расположены на корпусе 12 клапана и трубе 24b в одном или более местах, в которых наиболее вероятно возникновение кавитации. Одной распространенной областью, в которой может возникать кавитация, является область пути 18 потока текучей среды, расположенная непосредственно ниже по потоку от регулирующего поток элемента 14 и/или затвора, например, между пропускным отверстием 28 и выпускным отверстием 22. Таким образом, датчики акустической эмиссии 26а и 26b расположены в разных выбранных местах вдоль пути 18 потока текучей среды между пропускным отверстием 28 и выпускным отверстием 22. Например, датчик акустической эмиссии 26а расположен смежно с пропускным отверстием 28, а датчик акустической эмиссии 26b расположен смежно с выпускным отверстием 22. Во время кавитации образование пузырьков газа может создавать группу первых акустических сигналов и направленный внутрь взрыв пузырьков газа может создавать вторую группу акустических сигналов. Датчики акустической эмиссии 26а-с обнаруживают эти первую и вторую группы акустических сигналов и создают электрические сигналы акустической эмиссии, представляющие эти группы акустических сигналов, способом, хорошо известным в данной области техники. В этом варианте реализации датчик акустической эмиссии 26а может быть более подходящим для обнаружения образования пузырьков газа, или "кипения", а датчик акустической эмиссии 26b может быть более подходящим для обнаружения направленного внутрь взрыва пузырьков. Кавитация также может возникать или продолжать возникать далее ниже по потоку от выпускного отверстия 22, например, в области трубы 24b, непосредственно смежной с выпускным отверстием 22. Таким образом, датчик акустической эмиссии 26с расположен на трубе 24b смежно с соединением с выпускным отверстием 22. Датчик акустической эмиссии 26с также может обнаруживать направленный внутрь взрыв пузырьков или может обнаруживать незначительное количество направленных внутрь взрывов или нормальный поток, т.е. поток без кавитации.
[0028] Датчик акустической эмиссии 26d расположен вдоль пути 18 потока текучей среды в одном или более местах вблизи регулирующего клапана 10, которые, вероятно, не испытывают кавитацию. Датчик акустической эмиссии 26d может быть расположен на стороне, расположенной выше по потоку от регулирующего поток элемента 14. Например, датчик акустической эмиссии 26d может быть прикреплен к наружной поверхности корпуса 12 клапана между впускным отверстием 20 и регулирующим поток элементом 14, как проиллюстрировано на фиг. 1, или на трубе 24а. Так как датчик акустической эмиссии 26d расположен в месте, в котором возникновение кавитации маловероятно, датчик акустической эмиссии 26d выдает базовую акустическую информацию, которая может быть использована в качестве базового измерения нормального потока, т.е. потока без кавитации. Базовая акустическая информация, генерируемая датчиком акустической эмиссии 26d, может иметь форму электрических сигналов акустической эмиссии, называемых базовыми сигналами эмиссии. Базовая акустическая информация может сравниваться с акустической информацией, полученной из сигналов акустической эмиссии, генерируемых датчиками акустической эмиссии 26а-с, для калибровки датчиков акустической эмиссии 26а-с, обнаружения присутствия кавитации в текучей среде и/или измерения интенсивности кавитации.
[0029] Предпочтительно, датчики акустической эмиссии 26a-d закреплены снаружи соответствующего корпуса 12 клапана и труб 24а и 24b, т.е. на стороне стенки, противоположной пути 18 потока текучей среды. В этом варианте реализации датчики акустической эмиссии 26a-d могут обнаруживать акустические сигналы от кавитации вдоль пути 18 потока без нарушения границы пути потока. То есть путь 18 потока остается герметичным без датчиков акустической эмиссии 26a-d или проводящих проводов, проходящих через граничную стенку, например, в уплотнении или фланце. За счет отсутствия нарушения границы пути потока система 8 может получать акустические сигналы таким образом, при котором маловероятны протечки. Датчики акустической эмиссии 26a-d могут быть функционально соединены с корпусом 12 клапана и/или трубами 24а, 24b любым способом, достаточным для того, чтобы удерживать датчики акустической эмиссии 26a-d расположенными на соответствующем корпусе 12 клапана и/или трубах 24а, 24b и способными правильно воспринимать акустические сигналы в виде вибраций, исходящих от жидкости, протекающей вдоль пути 18 потока текучей среды. Предпочтительное акустическое соединение для акустико-эмиссионного контроля кавитации подобно процессу, описанному в стандарте Е650 ASTM, известному в данной области техники. Например, как правило, важно поддерживать максимальный непосредственный контакт между активной зоной обнаружения на поверхности датчика акустической эмиссии и поверхностью устройства регулирования потока с минимальными зазорами или воздушным промежутком между ними. Таким образом, датчики акустической эмиссии 26a-d могут быть непосредственно соединены с наружной поверхностью соответствующего корпуса 12 клапана и/или труб 24а, 24b, например, с помощью сварных швов, крепежных элементов, хомутов или клеящих веществ. Предпочтительно, чтобы форма поверхности датчика акустической эмиссии отвечала соответствующей форме принимающей поверхности корпуса клапана или трубы. В некоторых случаях между принимающей поверхностью и поверхностью датчика может быть расположен тонкий слой смазки или геля, при этом он распределен так, чтобы исключить какие-либо пузырьки воздуха между ними.
[0030] Между поверхностью датчика акустической эмиссии и принимающей поверхностью может быть расположен тепловой изолятор (не проиллюстрирован), чтобы изолировать датчик акустической эмиссии от корпуса клапана. Применение теплового изолятора может быть преимущественным там, где клапан работает при высокой температуре или если доступ к клапану ограничен. Тепловой изолятор может представлять собой металл с одной или более открытыми наружными поверхностями, предназначенными для рассеивания тепла. Включение теплового изолятора также может требовать некоторой компенсации и/или корректировок сигналов акустической эмиссии для подстройки под изменения, обусловленные тепловым изолятором.
[0031] Процессор 30 функционально соединен с одним или более из датчиков акустической эмиссии 26a-d для приема соответствующей акустической информации, генерируемой ими. Акустическая информация может быть передана любым подходящим способом, например путем приема сигналов акустической эмиссии непосредственно по проводному или беспроводному каналу связи или путем непрямого приема акустической информации по другим возможным каналам связи. Предпочтительно, акустическая информация предоставляется в виде электрических сигналов акустической эмиссии, генерируемых датчиками акустической эмиссии 26a-d в ответ на воспринятые акустические сигналы. Процессор 30 сконфигурирован для определения и контроля присутствия кавитации в пути 18 потока текучей среды на основании акустической информации, принятой от любого одного или более датчиков акустической эмиссии 26а, 26b, 26с и/или 26d. Процессор 30 также сконфигурирован для извлечения данных из акустической информации и использования акустической информации для определения дополнительной информации о регулирующем клапане 10 или информации, относящейся к нему, на основании контролируемой кавитации. Процессор 30 может быть предназначен для контроля присутствия кавитации в устройстве регулирования потока или процессор 30 может быть объединен с другими автоматизированными системами, которые осуществляют другие функции управления технологическим процессом. Например, процессор 30 может быть объединен с устройством позиционирования 32 для управления положением регулирующего поток элемента 14. Устройство позиционирования 32 может представлять собой типичное цифровое устройство позиционирования клапана, такое как цифровой контроллер клапана Fisher Fieldview™ DVC6000, производимый компанией Emerson Process Management, расположенной в Маршалтауне, штат Айова. Процессор 30 может быть соединен и/или объединен с одним или более другими компьютерами 34 системы управления установкой, например, с помощью шины 36.
[0032] В одном варианте реализации процессор 30 содержит цифровой сигнальный процессор (ЦСП) 38, один или более цифровых или других электронных модулей памяти 40, один или более процессоров 42 вычислительной машины и другие известные компоненты вычислительной машины, такие как устройства ввода/вывода, устройства обмена данными, специализированные интегральные микросхемы (ASIC) и/или модули программного обеспечения для выполнения функций и способов, описанных в данном документе, таким способом, который будет понятен специалисту в области цифровой обработки сигналов и компьютерных наук. ЦСП 38 может содержать аналого-цифровой (АЦ) преобразователь. В других вариантах реализации процессор 30 может содержать встроенные подпрограммы обработки сигнала для обработки сигналов акустической эмиссии, принятых от датчиков акустической эмиссии 26a-d, вместо специального ЦСП 38. Процессор 30 вычислительной машины может содержать все из вышеупомянутых функциональных компонентов в одном блоке, или один или более компонентов могут быть дистанционными и функционально подключенными по любой известной схеме обмена данными, например, через протокол Foundation™ Fieldbus, протокол HART, интернет, Ethernet и/или другие подходящие схемы обмена данными, которые будут понятны специалисту в данной области техники. Обмен данными между различными компонентами системы 8 может быть организован через одно или более проводных соединений и/или беспроводных соединений.
[0033] Процессор 30 содержит команды управляющей программы или реализован с возможностью доступа к этим командам управляющей программы, выполняемым с помощью соответствующего аппаратного и/или программного обеспечения, достаточного для приема акустической информации, генерируемой датчиками акустической эмиссии 26a-d, и обработки принятой акустической информации способом, достаточным для контроля уровней кавитации в пути потока текучей среды на основании частоты и интенсивности отдельных кавитационных событий. Чтобы достичь этого, одна или более подпрограмм, предпочтительно в виде наборов программных команд, является доступной для процессора 30. В одном варианте реализации подпрограмма получения 50, подпрограмма фильтрации 52 и одна или более подпрограмм контроля 54а, 54b, 54 с и 54d хранятся в памяти 40. В других вариантах реализации программные команды могут дополнительно или альтернативно быть встроены непосредственно в процессор 42 вычислительной машины и/или могут храниться еще где-либо, и процессор 42 вычислительной машины будет иметь к ним дистанционный доступ. Подпрограмма получения 50 обеспечивает прием процессором 30 акустической информации, сгенерированной датчиками акустической эмиссии 26а-d, например, путем приема сигналов акустической эмиссии ("сигналы АЭ"). Подпрограмма фильтрации 52 фильтрует принятые сигналы АЭ для выбора только тех сигналов, которые удовлетворяют одной или более заданным характеристикам, указывающим на кавитацию в регулирующем клапане 10, и игнорирования других сигналов. В некоторых вариантах реализации фильтрация может дополнительно или альтернативно выполняться путем фильтрации акустических сигналов датчиками акустической эмиссии 26a-d и/или фильтрующим аппаратным обеспечением 55. Это фильтрующее аппаратное обеспечение 55 функционально расположено между датчиками акустической эмиссии 26a-d и процессором 30 с тем, чтобы фильтровать сигналы акустической эмиссии перед их поступлением в процессор 30. Подпрограммы контроля 54a-d используют выбранные сигналы для определения и контроля кавитации в регулирующем клапане 10 в соответствии с различными критериями. Вместе подпрограмма получения 50, подпрограмма фильтрации 52 и одна или более подпрограмм контроля 54a-d могут быть сконфигурированы для реализации одного или более способов, описанных более подробно далее. Подпрограммы 50, 52 и 52a-d могут представлять собой команды в виде программного обеспечения, например, сохраненного в памяти 40, и/или аппаратное обеспечение, например специальные схемы внутри процессора 42 вычислительной машины, ЦСП 38, устройство позиционирования 32 и/или датчики 26a-d.
[0034] Обратимся к фиг. 2 и 3, где проиллюстрирован способ 100 контроля кавитации в устройстве регулирования потока, таком как регулирующий клапан 10, и/или трубах 24а или 24b. Этот способ реализуется с помощью системы 8, проиллюстрированной на фиг. 1. Система 8 сконфигурирована для получения акустических сигналов от текучей среды, протекающей через устройство регулирования потока с помощью любого одного или более датчиков акустической эмиссии 26a-d в диапазоне частот, вероятно свидетельствующих о кавитации. Полученные акустические сигналы предпочтительно содержат данные нестационарной акустической энергии, сгенерированной в результате кавитации. Система 8 может быть сконфигурирована для обеспечения некоторого уровня фильтрации в датчиках акустической эмиссии, например, за счет регулировки параметров чувствительности датчиков акустической эмиссии, выбора датчиков акустической эмиссии с заданными диапазонами чувствительности и/или регулировки выходных параметров для сигнала акустической эмиссии, выдаваемого датчиками акустической эмиссии. В некоторых вариантах реализации датчики акустической эмиссии 26a-d выполнены с возможностью фильтрации акустических сигналов с тем, чтобы обеспечивать первый уровень фильтрации за счет только получения акустических сигналов в определенном диапазоне. Например, в некоторых вариантах реализации этот диапазон составляет от около 500 кГц до около 1600 кГц, но могут быть использованы и другие диапазоны. Система 8 может быть сконфигурирована для обеспечения некоторого уровня фильтрации между датчиками акустической эмиссии и процессором 30, например, с помощью фильтрующего аппаратного обеспечения 55, функционально расположенного между датчиками акустической эмиссии и процессором 30. Эта система может быть сконфигурирована для обеспечения некоторого уровня фильтрации, например, путем регулировки параметров ограничения приема в процессоре 30, например, с помощью командных подпрограмм или программ, реализованных в аппаратном или программном обеспечении. Параметры ограничения приема могут включать один или более параметров в АЦ-преобразователе, ЦСП 38 или других аппаратных или программных компонентах процессора 30. Процессор 30 принимает акустическую информацию в виде сигналов АЭ от одного или более датчиков акустической эмиссии 26a-d об акустических сигналах, вызванных нестационарными событиями, которые возникают при каждом образовании пузырька, схлопывании каверны или пузырька во время кавитационного события в устройстве регулирования потока, и использует данные для вычисления уровня кавитации.
[0035] В блоке 102 происходит получение акустических сигналов от устройства регулирования потока по меньшей мере в пределах предварительно выбранного диапазона частот. В одном варианте реализации изначально один или более датчиков акустической эмиссии 26a-d получают акустические сигналы. Датчики акустической эмиссии 26a-d сконфигурированы для получения данных нестационарной акустической энергии в пределах диапазона частот, например, по меньшей мере от около 500 кГц до около 1600 кГц. Акустические сигналы, полученные любым из датчиков 26а и 26b, например, могут быть использованы для предоставления непосредственной акустической информации в отношении возникновений кавитации в регулирующем поток клапане 10 ниже по потоку от пропускного отверстия 28. Акустические сигналы, полученные датчиком 26с, могут предоставлять непосредственную информацию в отношении возникновений кавитации в трубе 24b, примыкающей к расположенному ниже по потоку выпускному отверстию 22 регулирующего клапана 10. Акустические сигналы, полученные датчиком 26d, могут представлять контрольную или базовую информацию в отношении стандартного потока жидкости без кавитации. В целях следующих описаний акустические сигналы получают с помощью датчика акустической эмиссии 26а; тем не менее этот же процесс может быть повторен для любого из датчиков акустической эмиссии 26a-d. Датчик акустической эмиссии 26а затем генерирует акустическую информацию в виде сигнала АЭ, представляющего полученные данные нестационарной акустической энергии. Сигнал АЭ передается в процессор 30, например, по проводам 56 и/или другому подходящему пути передачи электронных данных. Блок 102 может быть выполнен, например, с помощью подпрограммы получения 50, выполняемой процессором 30.
[0036] В блоке 104 определяется, обусловлен ли сигнал АЭ из блока 102 кавитационным событием в соответствии с заданными параметрами. Кавитационное событие определено одной или более заданными характеристиками сигнала АЭ. В одном варианте реализации кавитационное событие определяется как полученный сигнал АЭ, который выше заданного минимального порога и находится в заданном диапазоне фильтра. Диапазон фильтра может включать минимальный порог (т.е. нижний конец) и заданную максимальную границу (т.е. высокий конец). Например, вся форма сигнала АЭ может рассматриваться на основании амплитуды и частоты сигнала. Амплитуда формы сигнала АЭ представляет децибелы акустической энергии (дБАЭ) данной формы сигнала. Предпочтительно, дБАЭ измеряется в микровольтах и представляется в дБАЭ путем вычисления -20 Log10 (максимальная амплитуда напряжения / 1 микровольт). Может быть определено, удовлетворяет ли форма сигнала АЭ одному или более пороговым параметрам, таким как амплитуда в пределах определенного диапазона и/или частота обнаружения сигналов большой амплитуды. Тем не менее, могут быть использованы и другие пороги и параметры фильтра. Если сигнал АЭ превышает заданный минимальный порог и находится в пределах заданного диапазона фильтра, то сигнал АЭ считается "обнаружением", обусловленным кавитационным событием, которое, например, может отразиться на техническом обслуживании устройства регулирования потока. В этом случае сигнал АЭ выбирается как обусловленный кавитационным событием и управление переходит к блоку 106. Если сигнал АЭ не превышает заданный минимальный порог и не попадает в пределы заданного диапазона фильтра, то сигнал АЭ игнорируется и управление возвращается к блоку 102 для получения другого сигнала АЭ от датчика акустической эмиссии 26а. Блок 104 может быть выполнен, например, с помощью подпрограммы фильтрации 52, выполняемой процессором 30.
[0037] Блок 106 регистрирует предварительно выбранные характеристики выбранного сигнала АЭ из блока 104, представляющего различную акустическую информацию от кавитационного события, захваченного датчиком акустической эмиссии 26а. Как проиллюстрировано на фиг. 2А, отдельные кавитационные события, как правило, происходят в группах во время периода кавитационного потока. На фиг. 2А проиллюстрирована приведенная в качестве примера форма сигнала ФС для нестационарного события, которая может быть подобной для группы кавитационных событий во время периода кавитационного потока. На верхнем графике проиллюстрировано напряжение полученных сигналов S, а на нижнем графике проиллюстрированы превышения порога сигналами. Выходное напряжение датчика, как проиллюстрировано на верхнем графике, как правило, приводится в децибелах акустической энергии (т.е. дБАЭ). Сигналы S начинаются в момент времени T0 без кавитационных событий, превышают заданный пороговый уровень Τ в момент времени T1, возрастают до пиковой амплитуды в момент времени T2, понижаются обратно ниже порогового уровня Τ в момент времени T3 и понижаются до отсутствия кавитационных событий в момент времени T4. Другие характеристики могут включать дополнительные признаки полученного сигнала S, такие как количество, частота и/или длительность времени превышений порога ПП в группе, время нарастания от первого превышения порога до наибольшей амплитуды полученного сигнала S в группе обнаружений, и накопленная энергия группы обнаружений, каждый из которых хорошо известен в области обработки акустических сигналов. Превышения порога ПП могут соответствовать обнаружениям и отсчетам, рассмотренным более подробно далее в отношении фиг. 4.
[0038] Вернемся к фиг. 2, в блоке 108 определяется значение уровня кавитации из характеристик, записанных в блоке 106. Уровень кавитации определяется на основании частоты кавитационных событий и интенсивности кавитационных событий. В одном приведенном в качестве примера способе, проиллюстрированном на фиг. 3, блок 108 включает первое вычисление, относящееся к частоте кавитационных событий в блоке 110, второе вычисление, относящееся к интенсивности каждого кавитационного события в блоке 112, и третье вычисление, относящееся к значению уровня кавитации в блоке 114.
[0039] В блоке 110 вычисляется частота обнаружения путем регистрации количества кавитационных событий, которые происходят во время выбранного периода времени. Например, частота обнаружения H может представлять собой количество кавитационных событий N, которые происходят в период времени t, непосредственно предшествующий настоящему времени Т, деленное на указанный период времени. Это может быть представлено в виде уравнения: H=NT-t/(T-t). В большинстве случаев частота обнаружения рассчитывается как количество кавитационных событий, которые происходят за некоторый период времени, не более чем несколько секунд, например от около 1 секунды до около 10 секунд. Однако в некоторых случаях могут быть использованы большие или меньшие периоды времени. В этот период времени частота обнаружения приводится как количество кавитационных событий за секунду. Как проиллюстрировано на фиг. 2А, в одном примере частота обнаружения R может быть вычислена как количество отдельных превышений порога ПП, которые возникают во время данного периода кавитационного потока (например, от T1 до T3), деленное на длительность периода кавитационного потока (например, T3-T1).
[0040] В блоке 112 вычисляется интенсивность каждого отдельного кавитационного события на основании характеристик, зарегистрированных в блоке 106. Интенсивность основана на измерении энергии, высвобождаемой в результате кавитационного события. Например, интенсивность может быть скоррелирована с амплитудой, длительностью, площадью под волной и/или другими отдельными признаками полученного сигнала S. В одном варианте реализации интенсивность определяется как абсолютное значение площади под одной формой сигнала или группой форм сигнала, как проиллюстрировано на фиг. 2А. Энергия может быть вычислена как интеграл от квадрата выходного напряжения датчика по времени, т.е. Энергия = Интеграл (v2)(dt), где v - выходное напряжение датчика и dt - изменение времени, как известно в данной области техники. Блоки 110 и 112 могут быть выполнены в любом порядке или одновременно.
[0041] В блоке 114 вычисляется значение уровня кавитации на основании частоты обнаружения, вычисленной в блоке 110, и интенсивности, вычисленной в блоке 112. Значение уровня кавитации предпочтительно вычисляется как функция как частоты обнаружения, так и интенсивности. То есть С=f(R,i), где С - уровень кавитации, R - частота обнаружения, i - интенсивность. Предпочтительно, уровень кавитации прямо пропорционален частоте обнаружения и интенсивности. Разные взаимоотношения в виде уравнений могут быть использованы для вычисления уровня кавитации С, зависящего от конкретных принятых данных и конкретных форм требуемого выхода.
[0042] Блоки 106-114 могут быть выполнены, например, с помощью подпрограммы контроля 54а процессора 30.
[0043] Уровень кавитации, определенный способом 100, может использоваться несколькими различными способами, например, в определении того, происходит ли кавитация, определении интенсивности кавитационной активности в некоторые моменты времени и/или отслеживании накопления кавитации и/или повреждения в течение некоторого периода времени. Эта информация может быть полезной, например, при контроле работы устройства регулирования потока, определении неидеального функционирования устройства регулирования потока и/или прогнозировании необходимости технического обслуживания без разборки устройства регулирования потока или полного его выхода из строя. Следующие способы построены на способе 100, чтобы использовать информацию, относящуюся к уровням кавитации, предоставленную способом контроля.
[0044] На фиг. 4 проиллюстрирован другой способ 200 контроля кавитации, который может быть полезным, например, для оценки повреждения, нанесенного устройству регулирования потока, такому как регулирующий клапан 10. Способ 200 может быть реализован с помощью системы 8, проиллюстрированной на фиг. 1. Способ 200 включает этапы способа 100 контроля уровней кавитации и использует информацию об уровнях кавитации для контроля кавитации в течение некоторого периода времени и контроля накопления кавитационной активности с течением времени. Эта информация может быть использована для оценки величины повреждения, которое испытало устройство регулирования потока, чтобы отследить повреждение и/или спрогнозировать и/или запланировать техническое обслуживание с целью устранения повреждения.
[0045] Система, проиллюстрированная на фиг. 1, сконфигурирована для получения данных нестационарной акустической энергии от любого одного или более датчиков акустической эмиссии 26a-d в пределах выбранного диапазона частот, как было подробно описано ранее в отношении способа 100.
[0046] В блоке 102 указанная система, проиллюстрированная на фиг. 1, получает данные нестационарной акустической энергии от любого одного или более датчиков акустической эмиссии 26a-d по меньшей мере в пределах предварительно выбранного диапазона частот и генерирует сигналы АЭ, как это было описано в подробностях ранее.
[0047] В блоке 104 процессор 30 определяет, обусловлен ли сигнал АЭ кавитационным событием в соответствии с заданными параметрами, и выбирает сигнал для дальнейшей обработки, если он находится в пределах заданных параметров, как было подробно описано ранее.
[0048] В блоке 106 процессор 30 регистрирует выбранные характеристики выбранного сигнала, такие как форма сигнала или другие отдельные признаки сигнала акустической эмиссии, как было подробно описано ранее.
[0049] В блоке 110 процессор 30 определяет частоту кавитационных событий, например, путем вычисления частоты обнаружения, как было описано ранее.
[0050] В блоке 112 процессор 30 определяет интенсивность каждого кавитационного события, например, путем вычисления количества энергии на одно кавитационное событие, как было описано ранее.
[0051] В блоке 114а процессор 30 вычисляет уровень кавитации и определяет, превышает ли уровень кавитации заданный порог уровня кавитации. Если уровень кавитации превышает заданный порог уровня кавитации, то управление переходит к блоку 116. Если уровень кавитации не превышает заданного порога уровня кавитации, то управление возвращается к блоку 102 для получения другого сигнала АЭ. В одном приведенном в качестве примера варианте реализации определение того, превышает ли уровень кавитации заданный порог уровня кавитации, может включать независимое сравнение каждого или любого из частоты обнаружения и интенсивности с отдельными пороговыми значениями для кавитационных событий. Частота обнаружения, вычисленная в блоке 110, сопоставляется с заданным пороговым значением частоты обнаружения. Интенсивность сопоставляется с заданным пороговым значением интенсивности. В некоторых вариантах реализации уровень кавитации определяется как превышающий заданный порог уровня кавитации, если как частота обнаружения, так и интенсивность превышают соответствующее пороговое значение частоты обнаружения и пороговое значение интенсивности. В других вариантах реализации уровень кавитации определяется как превышающий заданный порог уровня кавитации, если или частота обнаружения, или интенсивность превышает соответствующее пороговое значение частоты обнаружения и пороговое значение интенсивности. В других приведенных в качестве примера вариантах реализации уровень кавитации вычисляется таким образом, как было описано ранее для блока 114, проиллюстрированного на фиг. 3, как составное значение, зависящее от каждого из следующего: частоты обнаружения и интенсивности. Составное значение уровня кавитации сопоставляется с заданным составным значением порога уровня кавитации. Если составное значение превышает составной порог уровня кавитации, то уровень кавитации определяется как превышающий заданный порог уровня кавитации. Дальнейший приведенный в качестве примера вариант реализации может включать сочетание предшествующих двух приведенных в качестве примера вариантов реализации. По любой из этих схем вычисляемый уровень кавитации представляет собой функцию как частоты кавитационных событий, так и интенсивности отдельных кавитационных событий, и предпочтительно представляет собой прямо пропорциональную функцию, как объяснялось ранее. Если уровень кавитации не превышает заданного порога уровня кавитации, то управление возвращается к блоку 102 для получения другого сигнала АЭ от одного или более датчиков акустической энергии 26a-d. Если уровень кавитации превышает заданный порог уровня кавитации, то процессор 30 вводит дополнительные протоколы контроля, которые могут, например, использоваться для оценки повреждения, нанесенного устройству регулирования потока, что может быть выполнено на одном или более этапах блоков 116, 118 и 120, описанных далее.
[0052] Блок 116 генерирует предупредительный сигнал, указывающий на то, что уровень кавитации превышает заданное пороговое значение или значения. Предупредительный сигнал предпочтительно генерируется процессором 30.
[0053] Блок 118 отслеживает количество и/или объем времени превышений уровнем кавитации заданного порога, так что можно контролировать оценку накопленного повреждения, нанесенного устройству регулирования потока, обусловленного кавитацией. В некоторых вариантах реализации блок 118 увеличивает счетчик на число, равное количеству определений превышения уровнем кавитации заданного уровня кавитации. Блок 118 может увеличивать счетчик каждый раз, когда в блоке 116 генерируется предупредительный сигнал, или блок 118 может увеличивать счетчик непосредственно в ответ на положительное определение в блоке 114а без генерирования предупредительного сигнала в блоке 116. Счетчик предпочтительно представляет собой цифровой электронный счетчик в процессоре 30, например, сохраненный в электронной памяти, базу данных и/или другой цифровой счетный механизм; однако могут быть использованы и другие типы счетчиков, например аналоговый счетчик. В некоторых вариантах реализации блок 118 отслеживает накопленное количество времени, в течение которого уровень кавитации превышает заданный порог. Блок 118 может определять длительность времени каждого случая превышения уровнем кавитации заданного порога и аддитивно накапливать каждую такую длительность времени. Аддитивное накопление будет представлять накопленное количество времени, в течение которого уровень кавитации превышал заданный порог.
[0054] Блок 120 выдает пользователю уведомление о существовании аварийного состояния. Уведомление может быть сгенерировано процессором 30, например, в форме электронного уведомления, отправленного на экран дисплея.
[0055] Блок 122 возвращает управление блоку 102.
[0056] Подсчитанное число, накопленное счетчиком в блоке 118, может использоваться для оценки и/или отслеживания повреждения, нанесенного устройству регулирования потока. А именно, подсчитанное число может быть показателем величины повреждения, полученного устройством регулирования потока с течением времени. Подсчитанное число может быть скоррелировано с оценками повреждения устройства регулирования потока с помощью корреляции между накопленным количеством кавитационных событий и величиной повреждения, полученного устройством регулирования потока. Например, по мере увеличения подсчитанного числа (т.е. количества кавитационных событий выше заданного порога уровня кавитации) предполагается, что расчетное накопленное повреждение, полученное устройством регулирования потока, также увеличивается. Корреляция может быть линейным, нелинейным, экспоненциальным или другим подходящим отношением, которое, например, может быть определено экспериментально и/или теоретически. Таким образом, большое количество отсчетов может свидетельствовать об оценке, соответствующей значительной величине повреждения, полученного устройством регулирования потока, обусловленного кавитацией. И наоборот, малое количество отсчетов может свидетельствовать об оценке, соответствующей незначительной величине повреждения, полученного устройством регулирования потока, обусловленного кавитацией.
[0057] Подсчитанное число, накопленное счетчиком, может быть использовано для определения того, когда устройство регулирования потока потребует обслуживания с целью ремонта повреждения, которое обусловлено кавитацией или на которое она указывает. Например, подсчитанное число может быть установлено в ноль, когда устройство регулирования потока является новым и неповрежденным. Когда подсчитанное число достигает заданного предельного значения, устройство регулирования потока может быть назначено на обслуживание. В некоторых вариантах реализации, когда подсчитанное число достигает некоторого заданного предельного значения, может быть создан отчет, указывающий на то, что регулирующий клапан 10 подлежит обслуживанию. В этом варианте реализации оценка повреждения основана на накоплении повреждения, которое зависит от одного или и одного, и другого из частоты и интенсивности кавитационных событий в устройстве регулирования потока. Кроме того, оценка повреждения может быть скорректирована, чтобы придавать больший или меньший вес оценке в отношении или частоты, или интенсивности кавитационных событий. Заданное предельное значение может быть определено экспериментально и/или теоретически.
[0058] Подсчитанное число в некоторых вариантах реализации может использоваться для прогнозирования момента времени в будущем, когда потребуется выполнить обслуживание устройства регулирования потока с целью ремонта повреждения, которое обусловлено кавитацией или являющееся признаком кавитации. Например, скорость предупредительных сигналов, т.е. частота количества предупредительных сигналов за некоторое приращение времени, может быть использована в сочетании с накопленной суммой предупредительных сигналов за период времени для прогнозирования времени в будущем, когда будет достигнуто заданное предельное значение.
[0059] Блоки 116, 118, 120 и 122 могут быть выполнены последовательно или одновременно. При оценке и/или отслеживании повреждения, причиненного устройству регулирования потока кавитацией, могут быть осуществлены дополнительные функциональные этапы или может быть осуществлено меньшее количество функциональных этапов. Блоки 114а-122 могут быть выполнены, например, с помощью подпрограммы контроля 54b процессора 30.
[0060] На фиг. 5 проиллюстрирован способ 300 контроля кавитации, который может быть применен для контроля степени повреждения, нанесенного устройству регулирования потока, такому как регулирующий клапан 10. Способ 300 может быть реализован с помощью устройства, проиллюстрированного на фиг. 1. Способ 300 включает этапы способов 100 и 200 для контроля уровней кавитации и использует информацию об уровнях кавитации для определения информации, которая может быть использована для оценки частоты повреждения, полученного устройством регулирования потока.
[0061] Система, проиллюстрированная на фиг. 1, сконфигурирована для получения данных нестационарной акустической энергии от любого одного или более датчиков акустической эмиссии 26a-d в диапазоне от около 500 кГц до около 1600 кГц, предпочтительно таким же образом, как было описано ранее в отношении способов 100 и 200. Кроме того, блоки 102, 104, 106, 108 и 112 выполняются процессором 30 таким же образом, как было описано ранее в отношении способов 100 и 200, описание которых не повторяется в данном документе для краткости.
[0062] В блоке 124 вычисляется одна или более тенденций кавитационных событий. В одном варианте реализации в блоке 124 определяется тенденция частоты обнаружения и тенденция значений интенсивности. Тенденции могут определяться графически и/или статистически. Например, если частота обнаружения растет в течение определенного периода времени выборки, тенденция частоты обнаружения может быть положительной, если частота обнаружения снижается в течение указанного периода времени выборки, тенденция частоты обнаружения может быть отрицательной, и если частота обнаружения остается неизменной в течение указанного периода времени выборки, тенденция частоты обнаружения может оставаться неизменной (т.е. нулевой). Аналогично, если значения интенсивности увеличиваются, уменьшаются или остаются неизменными в течение определенного периода времени выборки, тенденция интенсивности может быть положительной, отрицательной или неизменной соответственно. Этот период времени выборки может быть выбран таким, чтобы являться любым подходящим периодом времени. Например, период времени выборки может быть периодом секунд, минут, часов, дней, недель, больше или меньше, в зависимости от требуемой интенсивности. Периоды времени выборки для каждой из тенденции частоты обнаружения и тенденции интенсивности могут быть одинаковыми или отличаться друг от друга. В другом варианте реализации блок 124 определяет тенденцию, которая сочетает в себе и включает каждое из данных частоты обнаружения и данных интенсивности в составную тенденцию кавитационной активности. При необходимости составная тенденция кавитационной активности может быть вычислена с различными весовыми коэффициентами и/или дополнительной информацией.
[0063] В блоке 126 определяется, показывает ли одна или более тенденций, вычисленных в блоке 124, увеличивается ли кавитационная активность в устройстве регулирования потока статистически значимым образом. Статистическая значимость может быть определена многими способами. Например, статистическая значимость может быть основана на скользящем среднем и/или на выбранном стандартном отклонении, кратном выбранной переменной. Например, в блоке 126 может определяться, превышает ли скользящее среднее тенденций, вычисленных в блоке 124, предварительно выбранное значение и/или увеличивается ли кавитационная активность со скоростью, которая превышает предварительно выбранную скорость в пределах предварительно выбранной статистической значимости по сравнению стандартного отклонения. Если это так, то управление переходит к блоку 128. В противном случае управление возвращается к блоку 102.
[0064] В блоке 128 генерируется предупредительный сигнал, который указывает на то, что уровень кавитации повышается. В блоке 130 процессор 30 уведомляет пользователя о том, что уровень кавитации повышается. Блоки 128 и 130 могут быть выполнены в любом желаемом порядке. Предупредительный сигнал, сгенерированный в блоке 128, может быть использован, например, для контроля устройства регулирования потока на предмет повышения нормальных уровней кавитации, что может свидетельствовать о некоторой проблеме, например неправильной работе или необходимости технического обслуживания, которые иначе не могли бы быть очевидными для оператора из визуального осмотра или другой информации.
[0065] В блоке 122 управление возвращается к блоку 102 для продолжения проведения контроля данных нестационарной акустической энергии из устройства регулирования потока.
[0066] Блоки 122-130 могут быть выполнены, например, с помощью подпрограммы контроля 54 с процессора 30.
[0067] В некоторых вариантах реализации два или более способов 100, 200 и 300 могут быть реализованы вместе или одновременно, чтобы предоставить пользователю несколько типов информации. Например, блоки со 102 по 112 могут быть выполнены последовательно, и затем два или более из каждого из блока 114, блоков со 114а по 120 и блоков со 124 по 130 могут быть выполнены для предоставления каждого из уровня кавитации, оценки накопленного повреждения и степени повреждения.
[0068] В некоторых вариантах реализации один или более датчиков акустической эмиссии 26a-d встроены в устройство позиционирования 32. В некоторых вариантах реализации один или более датчиков акустической эмиссии 26a-d объединены с программным обеспечением управления ресурсами автоматизированной системы управления установки управления технологическим процессом. В некоторых вариантах реализации один или более датчиков акустической эмиссии 26a-d объединены с системой управления технологическим процессом в установке управления технологическим процессом. Например, любой один или более из датчиков акустической эмиссии 26a-d могут быть связаны непосредственно со своим собственным выделенным процессором 30 или могут быть реализованы как компонент устройства позиционирования 32, ЦСП 38 или программное обеспечение высокого уровня, включая программное обеспечение управления ресурсами, такое как AMS Suite, предоставляемое компанией Emerson Process Management, или система управления технологическим процессом наивысшего уровня, такая как цифровая автоматизированная система DeltaV от компании Emerson Process Management.
[0069] В некоторых вариантах реализации процессор 30 сконфигурирован для определения проблемного состояния потока на основании положения регулирующего элемента 14. Процессор 30 сконфигурирован для приема информации о положении регулирующего поток элемента 14 от устройства позиционирования 32. Эта информация о положении используется для определения потенциально проблемных рабочих состояний на основании уровня кавитации, определенного любым из способов 100, 200 или 300. Информация о положении может быть скоррелирована с предполагаемыми уровнями кавитации для разных положений, и предполагаемый уровень кавитации сравнивается с фактическим уровнем кавитации, например, вычисленным в блоке 114. Например, может быть экспериментально установлено, что величина кавитации в данном регулирующем клапане изменяется в соответствии с некоторой определяемой функцией положения регулирующего поток элемента 14 при некоторых данных состояниях потока. Значительное отклонение фактического уровня кавитации от предполагаемого уровня кавитации может указывать на то, что регулирующий поток элемент 14 находится не в том положении, в котором он предположительно должен быть, что компонент вышел из строя или значительно изношен или что состояния потока отличаются от данных состояний потока. Таким образом, значительное отклонение между предполагаемым уровнем кавитации и фактическим уровнем кавитации может служить показателем для определения потенциальных проблем с регулирующим клапаном и/или состояниями потока через регулирующий клапан 10, что может потребовать дальнейшего изучения.
[0070] В одном приведенном в качестве примера варианте реализации подпрограмма 54d выполняется процессором 30 для реализации способа 400, проиллюстрированного на фиг. 6. Блок 402 получает информацию о положении из устройства позиционирования 32, например, через провода 60 или другой подходящий путь передачи данных. Блок 404 получает предполагаемый уровень кавитации, скоррелированный с этим положением. Предполагаемый уровень кавитации может быть получен, например, из базы данных в памяти 40. Блок 406 получает фактический уровень кавитации, например, из блока 114 или 114а. Блок 408 сопоставляет фактический уровень кавитации с предполагаемым уровнем кавитации. Если фактическая кавитация значительно отклоняется от предполагаемой кавитации, то в блоке 410 генерируется предупредительный сигнал. Предупредительный сигнал может быть выдан оператору или другим компонентам системы управления технологическим процессом для указания на то, что может требоваться дополнительная диагностика регулирующего клапана 10. Является ли отклонение значимым, определяется с помощью предварительно выбранного уровня значимости, который может быть выбран в соответствии с любым требуемым набором параметров. Как проиллюстрировано, способ 400 может возвращаться обратно к блоку 402 или после блока 408, или после блока 410. В некоторых вариантах реализации предупредительный сигнал подается оператору для предупреждения о необходимости изменить рабочее положение клапана.
[0071] В некоторых вариантах реализации процессор 30 сконфигурирован для различения состояния нормального потока и состояния кавитационного потока, превышающего заданный пороговый уровень кавитации, и генерирования отчета в отношении дифференциала. По меньшей мере два пути вычисления дифференциала могут включать: 1) вычисление дифференциала между двумя положениями в одно время, называемое "дифференциал положения", и 2) вычисление дифференциала между двумя моментами времени (например, в T0 и Т) в одном положении, называемое "временной дифференциал". Например, для определения дифференциала положения базовое состояние "нормального" потока может быть определено с использованием базовых акустических сигналов от датчика акустической эмиссии 26d для определения состояния нормального потока, который не имеет повышенного уровня кавитации. Например, для определения временного дифференциала базовое состояние "нормального" потока может быть определено, когда устройство регулирования потока является новым и работает при условиях, для которых известно или предполагается, что повышенный уровень кавитации отсутствует. Процессор 30 может содержать подпрограмму 54е для сопоставления акустической информации, ассоциируемой с состояниями нормального потока, с соответствующей акустической информацией от датчиков акустической информации 26а-с для определения различия между состоянием базового или нормального потока и состояниями потока в областях, в которых вероятна кавитация. Различия могут быть сгенерированы в один или более отчетов, которые могут быть использованы для дальнейшего анализа и инструкций в отношении работы и/или технического обслуживания устройства регулирования потока.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0072] Система, устройство и/или способ согласно идеям настоящего изобретения являются полезными для контроля кавитации в жидкости, протекающей через устройство управления технологическим процессом, такое как регулирующий клапан или труба, как описано в техническом примере, приведенном в данном документе. Однако система, устройство и/или способ могут иметь другие применения и/или преимущества, и изобретение не ограничивается примерами, освещенными в данном документе. Способность воспринимать присутствие кавитации в регулирующем клапане или другом устройстве регулирования потока или вблизи их в некоторых вариантах реализации может быть полезной для обеспечения возможности регулировки условий технологического процесса посредством регулирующего клапана. Она также в некоторых вариантах реализации может быть полезной для планирования технического обслуживания с целью ремонта повреждения, нанесенного регулирующему клапану и/или соседним трубным компонентам по причине кавитации.
[0073] Технические примеры, описанные и проиллюстрированные подробно в данном документе, являются исключительно примерами одного или более аспектов идей настоящего изобретения в целях обучения специалиста обычного уровня изготовлению и применению изобретения или изобретений, перечисленных в прилагаемой формуле изобретения. В объеме прилагаемой формулы изобретения предполагаются дополнительные аспекты, варианты реализации и формы, права на которые прямо защищены.
Регулировочный винт, приводимый в действие различными инструментами
Металлическая уплотнительная прокладка с эластомерной подложкой для использования с регуляторами для текучей среды
Регулятор для текучей среды и дросселирующий элемент для такого регулятора
Двунаправленный преобразователь постоянного тока в постоянный для управления накопителем энергии при отводе энергии
Способ и устройство для выравнивания положения кольца седла в клапане
Способ и устройство для определения положения клапана
Приводное устройство с регулируемым расходом для использования с автоматическими запорными клапанами
Измерительная трубка для газового регулятора, имеющая функцию усреднения давления
Антенный блок для использования во взрывоопасной среде
Устройство для регулирования расхода текучей среды, имеющее фиксатор для кольца седла
Система контроля управляющего клапана
Способы и устройства для использования данных о вибрациях для определения состояния устройства управления технологическим процессом
Способ (варианты) и устройство для анализа влияния трения на управляющие устройства для управления процессом
Поворотный клапан (варианты)
Программируемый привод и способ контроля его рабочего состояния и надежности
Акустическая калибровка гидравлического клапана
Узлы уплотнения, применяемые в жидкостных клапанах
Обеспечение диагностических и/или прогностических возможностей в системе управления технологическим процессом
Прогнозирование работы задвижки на основании лабораторных испытаний
Система и способ управления полевым устройством

