Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ГРАНИЦ ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к измерительной технике, а именно к измерению расстояний по линии визирования путем фокусирования, и может быть использовано для определения расстояния от перемещающегося измерительного устройства до границ неподвижного объекта, например, с целью избегания столкновения с ним.
Известен способ определения расстояния до объекта, основанный на методе триангуляции [Р. Фейнман, Р. Лейтон, М. Сэндс. «Фейнмановские лекции по физике», Том 1, - С. 94], включающий использование одновременных снимков объекта двумя камерами с известным расстоянием между ними, измерение углов между прямой линией, связывающей камеры и линиями визирования объекта и определение расстояния до объекта по известной геометрической формуле.
Недостатками этого способа является использование двух камер наблюдения, разнесенных на определенное расстояние, и необходимость вращения камер и измерения указанных углов.
Известен моностатический способ определения расстояния до объекта [RU 2340872 С1, МПК G01C 3/32 (2006.01), опубл. 10.12.2008], при котором дважды измеряют размер изображения объекта в плоскости изображения фотоприемника, причем изображения объекта получают разными по масштабу посредством перестройки оптической системы фотоприемника, которая имеет два известных фокусных расстояния. Затем определяют расстояние D до объекта по формуле 
где  и
и  - граничные фокусные расстояния оптической системы;
- граничные фокусные расстояния оптической системы;
 и
и  - размеры изображения объекта при
- размеры изображения объекта при  и
и  соответственно.
соответственно.
Этот способ требует неподвижности фотоприемника и не позволяет достоверно измерить расстояние во время его перемещения. Кроме этого, если объект имеет несимметричные границы, этот способ не позволяет определить расстояние до ближней и дальней границы объекта и дает только некоторое усредненное значение расстояния до объекта.
Известен способ определения расстояния до объекта при помощи оптического прибора [RU 2095756 С1, МПК G01C 3/32 (1995.01), опубл. 10.11.1997], выбранный в качестве прототипа, при котором измеряют размер изображения в плоскости изображений оптического прибора, осуществляют перемещение оптического прибора вдоль его линии визирования по направлению к объекту или от него на фиксированное расстояние, вновь измеряют размер изображения объекта и определяют расстояние D до объекта по формуле

где N0 - размер изображения объекта до перемещения;
Nt - размер изображения объекта после перемещения;
St - фиксированное расстояние, на которое переместили оптический прибор.
Такой способ позволяет определить только расстояние до объекта по линии визирования оптического прибора, но если объект имеет несимметричные границы, то невозможно определить расстояние до ближней и дальней границы объекта за одно измерение.
Технической проблемой, на решение которой направлено предлагаемое изобретение, является создание способа определения расстояния до границ объекта.
Предложенный способ определения расстояния до границ объекта, также как в прототипе, включает измерение размера изображения в плоскости изображений оптического прибора, перемещение оптического прибора вдоль его линии визирования по направлению к объекту или от него на фиксированное расстояние и вновь измерение размера изображения объекта.
Согласно изобретению, используют оптический прибор со светочувствительной матрицей, аналоговый сигнал от которой преобразуют в цифровой, размер изображения определяют в пикселях светочувствительной матрицы, результаты запоминают и используют для определения углов обзора границ объекта относительно линии визирования до и после перемещения оптического прибора и расстояний до дальней Dd и ближней Db границы объекта по формулам


где α1 и α2 - углы обзора ближней и дальней границы объекта до перемещения оптического прибора в одной плоскости, град.;
β1 и β2 - углы обзора ближней и дальней границы объекта после перемещения оптического прибора в той же плоскости, град.;
N1 и N1t - максимальные линейные размеры изображения объекта выше линии визирования до и после перемещения оптического прибора соответственно, пиксель;
N2 и N2t, - максимальные линейные размеры изображения объекта ниже линии визирования до и после перемещения оптического прибора, пиксель;
N0 - разрешающая способность светочувствительной матрицы по горизонтальной или вертикальной координате, пиксель;
γ - угол обзора оптического прибора со светочувствительной матрицей по горизонтальной или вертикальной координате, град.;
St - фиксированное расстояние, на которое осуществляют перемещение оптического прибора вдоль его линии визирования, м.
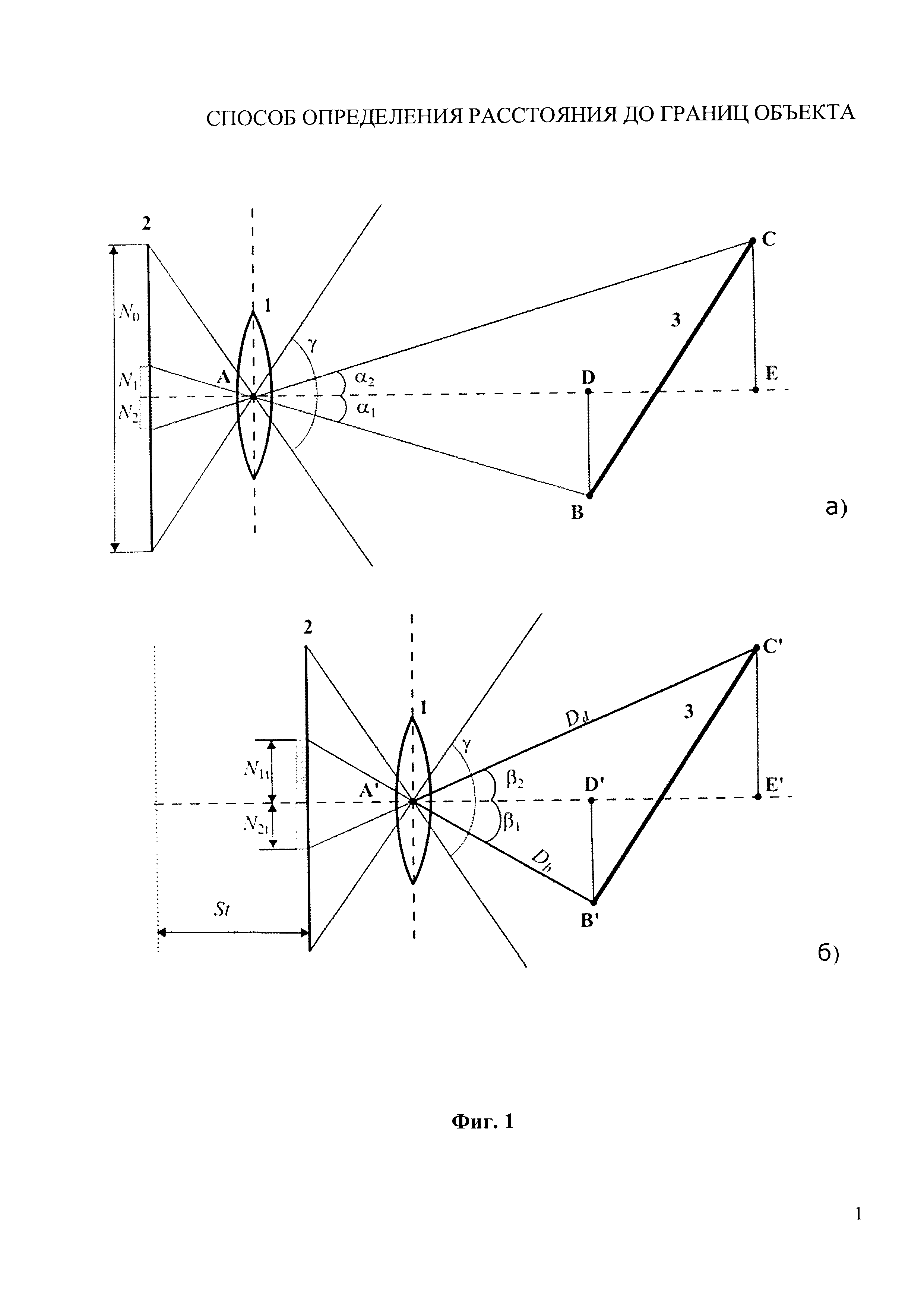
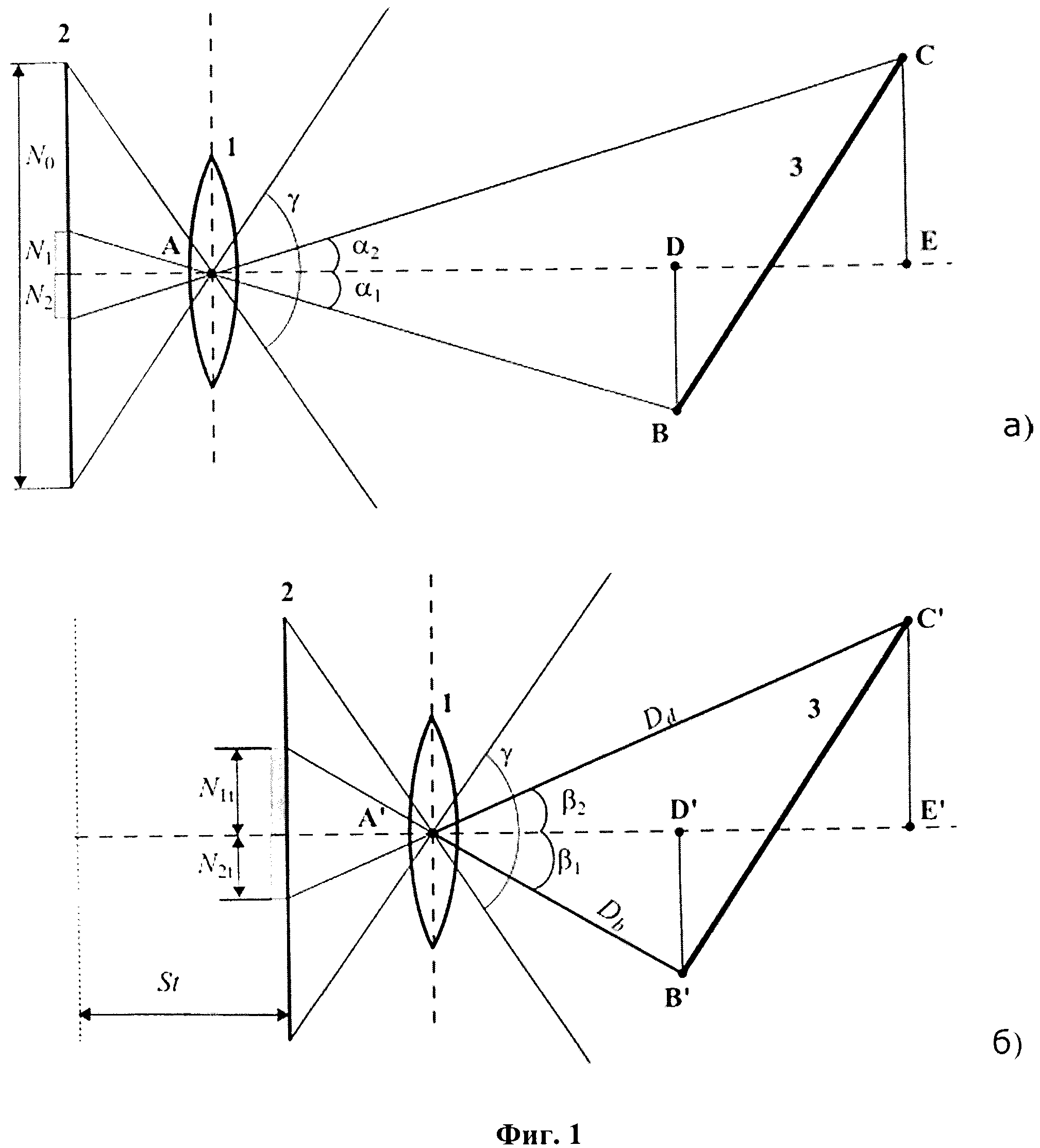
Если наблюдаемый объект расположен несимметрично и не перпендикулярно линии визирования, как видно из фиг. 1, то он имеет ближнюю и дальнюю границы от точки наблюдения. В задаче избегания столкновений с препятствиями, например, для беспилотных летательных аппаратов, важно, чтобы оптический прибор позволял получать именно эту информацию, а не только некоторое «среднее» расстояние до объекта по линии визирования оптического прибора. Для этого необходимо знать углы обзора границ объекта, как видно из формул (3) и (4), которые получены из следующих соотношений в обозначениях, представленных на фиг. 1:
СЕ=С'Е'=tgα2⋅АЕ=tgβ2⋅А'Е'=tgβ2⋅(AЕ-St),


BD=B'D'=tgα1⋅AD=tgβ1⋅A'D'=tgβ1⋅(AD-St),


Предложенный способ включает неочевидную операцию определения углов обзора границ объекта. Эта операция возможна при использовании в оптическом приборе светочувствительной матрицы с известной разрешающей способностью и размером, а оптический прибор при этом имеет известный угол обзора.
Таким образом, достигается технический результат, который заключается в определении расстояния до границ объекта, в том числе, если он расположен несимметрично и не перпендикулярно линии визирования и имеет ближнюю и дальнюю границы, а также в определении углов между линией визирования и границами объекта.
На фиг. 1 представлено взаимное расположение оптического прибора и наблюдаемого объекта, где а) - в момент t0 до перемещения оптического прибора, б) - в момент t после перемещения оптического прибора на фиксированное расстояние St.
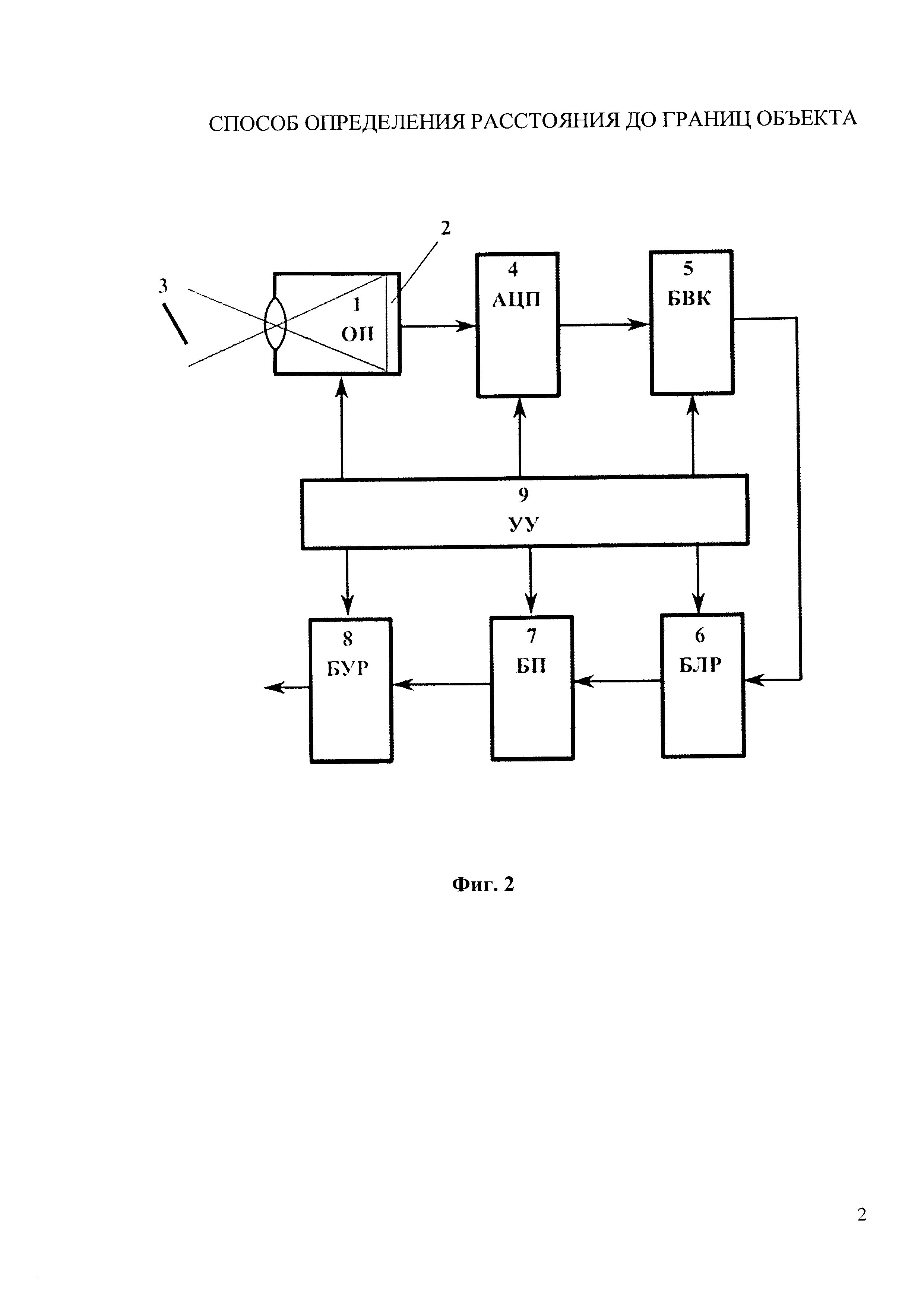
На фиг. 2 представлена схема реализации способа определения расстояния до границ объекта.
Способ определения расстояния до границ объекта может быть реализован с помощью оптического прибора 1 (ОП) со светочувствительной матрицей 2, на которой фокусируют изображение объекта 3. Выход светочувствительной матрицы 2 соединен с входом аналогово-цифрового преобразователя 4 (АЦП), выход которого подключен к входу блока выделения контура 5 (БВК), выход которого соединен со входом блока определения линейных размеров контура 6 (БЛР), выход которого соединен со входом блока памяти 7 (БП), выход которого подключен к блоку определения углов обзора объекта и расстояний до его ближней и дальней границы 8 (БУР). Управляющие входы оптического прибора 1 (ОП), аналогово-цифрового преобразователя 4 (АЦП), блока выделения контура 5 (БВК), блока определения линейных размеров контура 6 (БЛР), блока памяти 7 (БП), блока определения углов обзора объекта и расстояний до его ближней и дальней границы 8 (БУР) соединены с выходами управляющего устройства 9 (УУ). К выходу блока определения углов обзора объекта и расстояний до его ближней и дальней границы 8 (БУР) через соответствующие преобразователи может быть подключен индикатор для отображения определенных углов и расстояний или радиоканал для передачи данных удаленному оператору.
Оптическим прибором 1 (ОП) является любая управляемая фотовидеокамера со светочувствительной матрицей. В качестве аналогово-цифрового преобразователя 4 (АЦП) и блока памяти 7 (БП) использованы микросхемы, выпускаемые серийно. Блок выделения контура 5 (БВК) реализован с помощью микросхем дифференцирования цифрового представления изображения и компараторов для сравнения результатов дифференцирования с заданным порогом. Блок выделения линейных размеров контура 6 (БЛР) реализован с помощью схемы поиска максимального расстояния между координатами контура, расположенными на одной вертикальной или горизонтальной координате. Блок определения углов обзора объекта 3 и расстояний до его ближней и дальней границы 8 (БУР) реализован с помощью схем умножения, деления, вычитания и вычисления тригонометрических функций. Управляющее устройство 9 (УУ) реализовано на микропроцессоре, выпускаемом серийно, и устройствах согласования выходных сигналов микропроцессора с управляющими входами всех перечисленных блоков.
Предварительно в блок памяти 7 (БП) заносят значение разрешающей способности в пикселях светочувствительной матрицы 2 (по горизонтальной и вертикальной координате), угол обзора оптического прибора 1 (ОП) и фиксированное расстояние St на которое будут перемещать оптический прибор 1 (ОП).
Разрешающая способность, размер матрицы и углы обзора по двум координатам входят в состав технических характеристик современных фото- и видеокамер со светочувствительными матрицами. При разных фокусных расстояниях объектива углы обзора камеры разные даже при одинаковой светочувствительной матрице. В технических характеристиках указывают максимальный угол обзора камеры. Поэтому реальный угол обзора камеры целесообразно измерить экспериментально, сделав снимки размеченных по горизонтали и вертикали линеек на плоскости, перпендикулярной линии визирования. Например, светочувствительная матрица оптического прибора позволяет делать снимки 600×800 пикселей (разрешающая способность по вертикальной и горизонтальной координатам). С помощью этого оптического прибора предварительно снимают размеченные по горизонтали и вертикали линейки, расположенные на известном расстоянии до центра оптического прибора по линии визирования, например 5 м. Затем по снимку размеченных линеек определяют, какой линейный размер точно помещается в кадр, например 3×4 м. По этим числам определяют углы обзора камеры γверт и γгориз по вертикальной и горизонтальной координатам:
Соответственно 1 пиксель по вертикальной координате имеет угловое разрешение 61,9/600=0,103°, а по горизонтальной координате 77,3/800=0,096°.
При определении расстояния до границ объекта 3, например, до рекламного щита (фиг. 1) в начальный момент времени t0 по сигналу с управляющего устройства 9 (УУ) произвели снимок объекта 3 с помощью оптического прибора 1 (ОП) со светочувствительной матрицей 2, аналоговый сигнал с которой с помощью аналого-цифрового преобразователя 4 (АЦП) преобразовали в цифровой. С помощью блока выделения контура 5 (БВК) выделили контур объекта 3. Определили максимальный горизонтальный размер изображения объекта 3 в пикселях с помощью блока выделения линейных размеров контура 6 (БЛР). Результаты N1=100 и N2=100 (размеры изображения объекта 3 в пикселях левее и правее центра кадра) занесли в блок памяти 7 (БП).
По сигналу с управляющего устройства 9 (УУ) переместили оптический прибор 1 (ОП) на фиксированное расстояние St=1 м вдоль его линии визирования по направлению к объекту и произвели второй снимок объекта 3 в момент t. Полученный аналоговый сигнал со светочувствительной матрицы 2 с помощью аналого-цифрового преобразователя 4 (АЦП) преобразовали в цифровой. С помощью блока выделения контура 5 (БВК) выделили контур объекта 3 и определили максимальный размер изображения объекта в пикселях по той же координате с помощью блока выделения линейных размеров контура 6 (БЛР). Результаты N1t=130 и N2t=115 (размеры изображения объекта 3 в пикселях левее и правее центра кадра) занесли в блок памяти 7 (БП).
По сигналу с управляющего устройства 9 (УУ) блок определения углов обзора объекта 3 и расстояний до его ближней и дальней границы 8 (БУР) считывал из блока памяти 7 (БП) записанные данные (N1, N2, N1t, N2t, N0, St γ) и по формулам (3) и (4) определил углы обзора границ объекта 3 и расстояние до них от места расположения оптического прибора 1 (ОП): в момент t:


Полученные результаты передали на выход устройства.
Очевидно, что расстояние до объекта, определенное по формуле (2) способа-прототипа (200/(130+115-200))*1=4,44 м, является некоторым «усредненным» расстоянием до объекта и в задаче избегания столкновений такой информации недостаточно, поскольку одна из границ объекта находится существенно ближе (более чем на 30%).
Аналогично определяют расстояния до границ объекта 3 по вертикальной координате.
Таким образом, предлагаемый способ позволяет определять расстояния до границ объекта в том числе, если он расположен несимметрично и не перпендикулярно линии визирования и имеет ближнюю и дальнюю границы, а также определять углы между линией визирования и границами объекта, что позволяет более точно решать задачу избегания столкновений, например, беспилотных движущихся аппаратов с препятствиями.


Масляно-смоляная композиция
Способ изготовления хроматографического генератора технеция-99m облученным нейтронами молибденом-98
Способ плазменно-дуговой сварки плавящимся электродом
Резец для горных и дорожных машин
Способ получения диоксида титана рутильной модификации (варианты)
Способ испытания элементов котельного оборудования и трубопроводов на прочность и герметичность
Способ тушения пожаров
Генератор для получения стерильных радиоизотопов
Устройство для измерения переменных токов высоковольтной линии электропередачи
Масляно-смоляная композиция
Способ обнаружения лесного пожара
Система раннего обнаружения и определения типа лесного пожара

