Результат интеллектуальной деятельности: Способ и устройство для отслеживания состояния движущегося объекта и система для быстрой инспекции транспортного средства
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности, в общем, относится к технологии для отслеживания состояния движущегося объекта, а более конкретно, к способу и устройству для отслеживания состояния движущегося объекта на основе лазерного сканера и к системе для быстрой инспекции транспортного средства, которое включает устройство.
Уровень техники
[0002] В настоящее время для того, чтобы отслеживать состояние (к примеру, скорость) движущегося объекта (к примеру, транспортного средства), традиционно используется датчик скорости (к примеру, радар) для считывания скорости. Тем не менее, поскольку радар может быть неточным для считывания низкой скорости (например, менее 5 километров в час), радар имеет достаточно ограниченное применение. Помимо этого, радар для считывания скорости, в общем, имеет высокие затраты на изготовление, установку, тестирование и калибровку, при одновременной недостаточной экономии и надежности эксплуатации.
[0003] Помимо этого, в области техники быстрой инспекции транспортного средства на основе сканирования излучения, чтобы отслеживать состояние рассматриваемого транспортного средства, традиционно, множество фотоэлектрических переключателей или световых завес, а также катушек наземных датчиков устанавливается в инспекционном коридоре, чтобы инспектировать состояние движения рассматриваемого транспортного средства. Тем не менее, поскольку измерение позиции и скорости рассматриваемого транспортного средства посредством использования фотоэлектрических переключателей или световых завес может быть неточным, зачастую выполняется ошибочное определение относительно времени для испускания лучей излучения, что приводит к рискам для безопасности водителя транспортного средства.
Ссылки на документы предшествующего уровня техники:
1. EP 2221640 A2 (JENOPTIK ROBOT GMBH [DE]), 25.08.2017;
2. WO 2012/106730 A2 (RAPISCAN SYSTEMS INC [US]; MORTON EDWARD JAMES [GB]), 09.08.2012;
3. EP 2204788 A1 (VITRONIC DRING STEIN BILDVERA [DE]), 07.07.2010; и
4. US 2005/285738 A1 (SEAS ANTONIOS [US] ET AL), 29.12.2005.
Сущность изобретения
[0004] С учетом вышеизложенного, настоящее раскрытие сущности предоставляет способ и устройство для отслеживания состояния движущегося объекта на основе лазерного сканера и систему для быстрой инспекции транспортного средства, которое включает устройство.
[0005] Дополнительные аспекты и преимущества настоящего раскрытия сущности частично изложены в нижеприведенном описании и частично должны становиться очевидными из описания либо могут изучаться из практического применения настоящего раскрытия сущности.
[0006] Один аспект настоящего раскрытия сущности предоставляет устройство для отслеживания состояния движущегося объекта, включающее в себя: лазерный сканер, выполненный с возможностью отслеживать, по меньшей мере, один движущийся объект, въезжающий в область отслеживания, посредством испускания множества лазерных лучей с различными углами, по меньшей мере, в один движущийся объект с предварительно установленной частотой сканирования; и модуль обработки, выполненный с возможностью, для каждого движущегося объекта, определять, по меньшей мере, одну фиксированную точку на движущемся объекте, принимать первое расстояние, по меньшей мере, между одной фиксированной точкой движущегося объекта и позицией испускания лазерных лучей и угол испускания соответствующего лазерного луча, все из которых определяются посредством лазерного сканера в каждый момент времени, и определять и выводить относительную позицию движущегося объекта относительно лазерного сканера в каждый момент времени согласно первому расстоянию и углу испускания соответствующего лазерного луча.
[0007] В варианте осуществления, модуль обработки дополнительно выполнен с возможностью, для каждого движущегося объекта, согласно определенной относительной позиции движущегося объекта относительно лазерного сканера, выводить текущую относительную позицию движущегося объекта относительно лазерного сканера с различными временными интервалами или с различными интервалами проезжаемого расстояния движущегося объекта.
[0008] В другом варианте осуществления, когда движущийся объект движется в направлении к лазерному сканеру, чем меньше относительное расстояние между движущимся объектом и лазерным сканером, тем меньше временной интервал или интервал проезжаемого расстояния.
[0009] В еще одном другом варианте осуществления, модуль обработки дополнительно выполнен с возможностью, для каждого движущегося объекта, определять и выводить скорость движения движущегося объекта согласно первому расстоянию и углу испускания соответствующего лазерного луча.
[0010] В еще одном другом варианте осуществления, по меньшей мере, одна фиксированная точка включает в себя множество фиксированных точек, и определение скорости движения движущегося объекта согласно первому расстоянию и углу испускания соответствующего лазерного луча включает в себя: получение второго расстояния движущегося объекта в момент времени согласно первым расстояниям между фиксированными точками движущегося объекта и позицией испускания лазерных лучей в идентичный момент времени; и определение скорости движения движущегося объекта согласно вторым расстояниям движущегося объекта в моменты времени.
[0011] В еще одном другом варианте осуществления, модуль обработки выполнен с возможностью усреднять первые расстояния, чтобы получать второе расстояние.
[0012] В еще одном другом варианте осуществления, модуль обработки дополнительно выполнен с возможностью, для каждого движущегося объекта, определять направление движения движущегося объекта в текущий момент времени.
[0013] В еще одном другом варианте осуществления, модуль обработки выполнен с возможностью определять направление движения движущегося объекта в текущий момент времени согласно различным относительным позициям движущегося объекта относительно лазерного сканера в текущий момент времени и в предыдущий момент времени.
[0014] Другой аспект настоящего раскрытия сущности предоставляет способ для отслеживания состояния движущегося объекта на основе лазерного сканера, включающий в себя: отслеживание, по меньшей мере, одного движущегося объекта, въезжающего в область отслеживания, посредством инструктирования лазерному сканеру испускать множество лазерных лучей с различными углами, по меньшей мере, в один движущийся объект с предварительно установленной частотой сканирования; и для каждого движущегося объекта, определение, по меньшей мере, одной фиксированной точкой на движущемся объекте; прием первого расстояния, по меньшей мере, между одной фиксированной точкой движущегося объекта и позицией испускания лазерных лучей и угла испускания соответствующего лазерного луча, все из которых определяются посредством лазерного сканера в каждый момент времени; и определение и вывод относительной позиции движущегося объекта относительно лазерного сканера в каждый момент времени согласно первому расстоянию и углу испускания соответствующего лазерного луча.
[0015] В варианте осуществления, способ дополнительно включает в себя: для каждого движущегося объекта, согласно определенной относительной позиции движущегося объекта относительно лазерного сканера, определение и вывод текущей относительной позиции движущегося объекта относительно лазерного сканера с различными временными интервалами или с различными интервалами проезжаемого расстояния движущегося объекта.
[0016] В другом варианте осуществления, способ дополнительно включает в себя: для каждого движущегося объекта, определение и вывод скорости движения движущегося объекта согласно первому расстоянию и углу испускания соответствующего лазерного луча.
[0017] В еще одном другом варианте осуществления, по меньшей мере, одна фиксированная точка включает в себя множество фиксированных точек, и определение скорости движения движущегося объекта согласно первому расстоянию и углу испускания соответствующего лазерного луча включает в себя: получение второго расстояния движущегося объекта в момент времени согласно первым расстояниям между фиксированными точками движущегося объекта и позицией испускания лазерных лучей в идентичный момент времени; и определение скорости движения движущегося объекта согласно вторым расстояниям движущегося объекта в моменты времени.
[0018] В еще одном другом варианте осуществления, способ дополнительно включает в себя: для каждого движущегося объекта, определение направления движения движущегося объекта в текущий момент времени.
[0019] Еще один другой аспект настоящего раскрытия сущности предоставляет систему для быстрой инспекции транспортного средства, включающую в себя: устройство формирования изображений излучения, включающее в себя: источник лучей, выполненный с возможностью испускать лучи излучения для обнаружения рассматриваемого транспортного средства; средство обнаружения, выполненное с возможностью обнаруживать лучи излучения, передаваемые через рассматриваемое транспортное средство, и/или рассеянные лучи излучения; и устройство обработки изображений, выполненное с возможностью представлять изображения согласно сигналам лучей излучения, обнаруженных посредством средства обнаружения; устройство для отслеживания состояния движущегося объекта по любому из вышеуказанного; и устройство управления, выполненное с возможностью управлять устройством формирования изображений излучения таким образом, чтобы испускать лучи излучения в рассматриваемое транспортное средство согласно выводу устройства для отслеживания состояния движущегося объекта.
[0020] Посредством позиционирования или измерения скорости движущегося объекта с использованием лазерного сканера, устройство и способ для отслеживания состояния движущегося объекта, предоставленные посредством настоящего раскрытия сущности, позволяют значительно повышать точность измерения низкой скорости движущегося объекта по сравнению с датчиком измерения скорости, таким как радар. Кроме того, лазерный сканер является простым в установке и имеет низкие затраты. Помимо этого, лазерный сканер также может легко определять анормальное состояние (такое как движение назад или остановка в инспекционном коридоре) движущегося объекта, чтобы обеспечивать возможность быстрой обработки движущегося объекта. Помимо этого, посредством использования устройства для отслеживания движущегося объекта, система для быстрой инспекции транспортного средства настоящего раскрытия сущности позволяет повышать точность в определении времени для испускания лучей излучения, с тем чтобы эффективно исключать риск нарушения безопасности для водителя, вызываемый посредством ошибочного определения передней части рассматриваемого транспортного средства.
Краткое описание чертежей
[0021] Вышеуказанные и другие признаки и преимущества настоящего раскрытия сущности должны становиться очевидными из примерных вариантов осуществления, подробно описанных со ссылкой на прилагаемые чертежи.
[0022] Фиг. 1 является блок-схемой, иллюстрирующей устройство для отслеживания движущегося объекта на основе лазерного сканера согласно примерному варианту осуществления.
[0023] Фиг. 2 является принципиальной схемой, иллюстрирующей область отслеживания лазерного сканера согласно примеру.
[0024] Фиг. 3 является принципиальной схемой, иллюстрирующей лазерный луч согласно примеру.
[0025] Фиг. 4 является принципиальной схемой, иллюстрирующей способ для определения местоположения движущегося объекта согласно примеру.
[0026] Фиг. 5 является блок-схемой последовательности операций, иллюстрирующей способ для отслеживания состояния движущегося объекта на основе лазерного сканера согласно примерному варианту осуществления.
[0027] Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей способ для отслеживания состояния движущегося объекта на основе лазерного сканера согласно другому примерному варианту осуществления.
[0028] Фиг. 7 является блок-схемой, иллюстрирующей систему для быстрой инспекции транспортного средства согласно примерному варианту осуществления.
Подробное описание изобретения
[0029] Ниже подробнее описываются примерные варианты осуществления со ссылкой на прилагаемые чертежи. Тем не менее, примерные варианты осуществления могут реализовываться различными способами и не должны пониматься как ограниченные вариантами осуществления, изложенными в данном документе. Вместо этого, эти варианты осуществления предоставляются для того, чтобы делать настоящее раскрытие сущности более доскональным и всеобъемлющим и полностью передавать принцип примерных вариантов осуществления для специалистов в данной области техники. На всех прилагаемых чертежах, аналогичные ссылки с номерами представляют аналогичную или идентичную конструкцию, и ввиду этого этого избыточное описание опускается.
[0030] Описанные признаки, конструкция и характеристики могут комбинироваться в одном или более вариантов осуществления любым подходящим способом. В нижеприведенном описании, более конкретные подробности предоставляются для того, чтобы обеспечивать полное понимание вариантов осуществления настоящего раскрытия сущности. Тем не менее, специалисты в данной области техники должны принимать во внимание, что техническое решение настоящего раскрытия сущности может осуществляться на практике без одной или более конкретных подробностей либо может осуществляться на практике с другими способами, компонентами или материалами и т.д. В некоторых случаях, известная конструкция, материал или операция не проиллюстрирована подробно, чтобы исключать затруднение понимания настоящего раскрытия сущности.
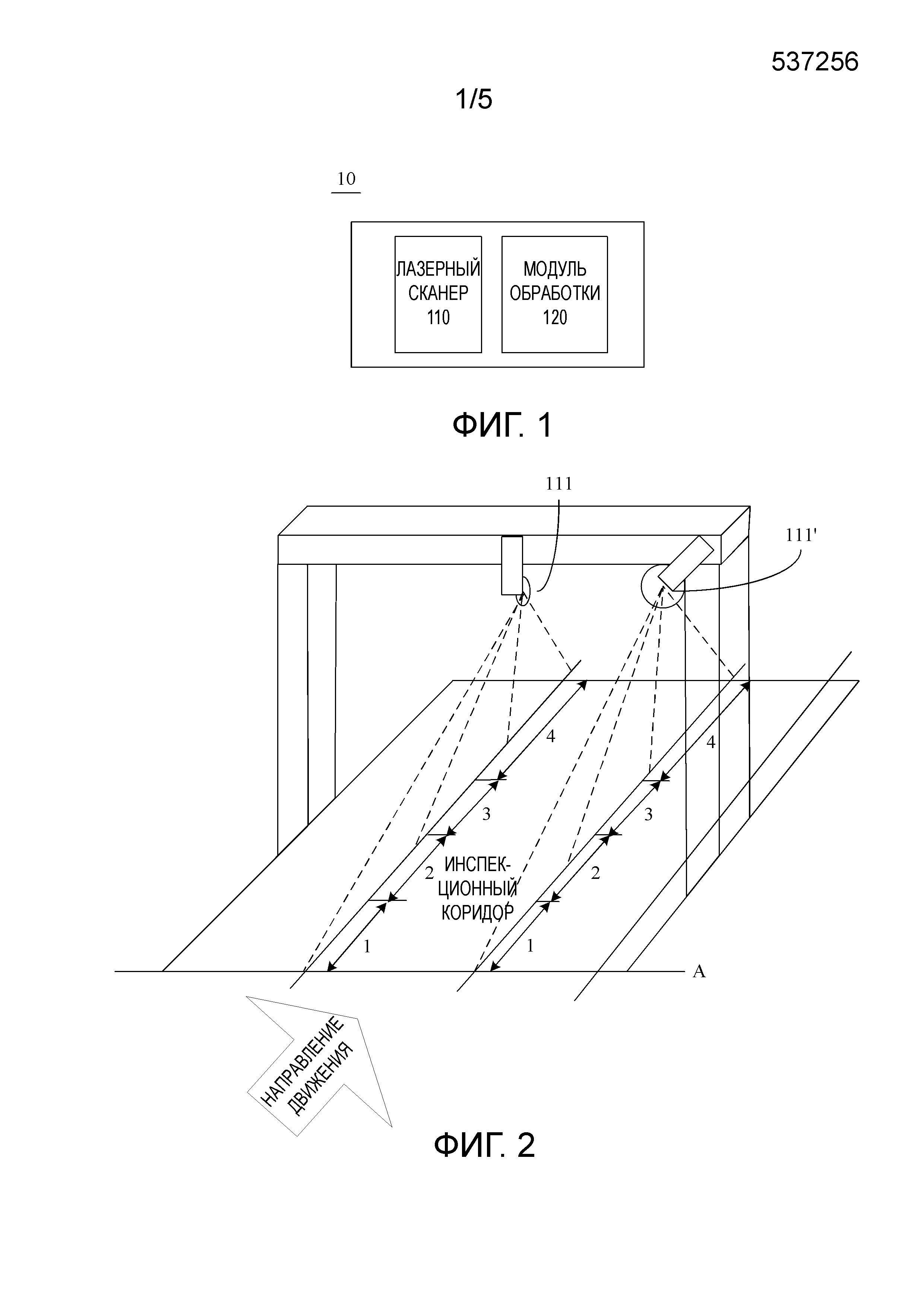
[0031] Фиг. 1 является блок-схемой, иллюстрирующей устройство для отслеживания движущегося объекта на основе лазерного сканера согласно примерному варианту осуществления. Как показано на фиг. 1, устройство 10 для отслеживания движущегося объекта включает в себя лазерный сканер 110 и модуль 120 обработки.
[0032] В варианте осуществления, лазерный сканер 110 выполнен с возможностью отслеживать, по меньшей мере, один движущийся объект, въезжающий в область отслеживания, посредством испускания множества лазерных лучей под различными углами, по меньшей мере, в один движущийся объект с предварительно установленной частотой сканирования.
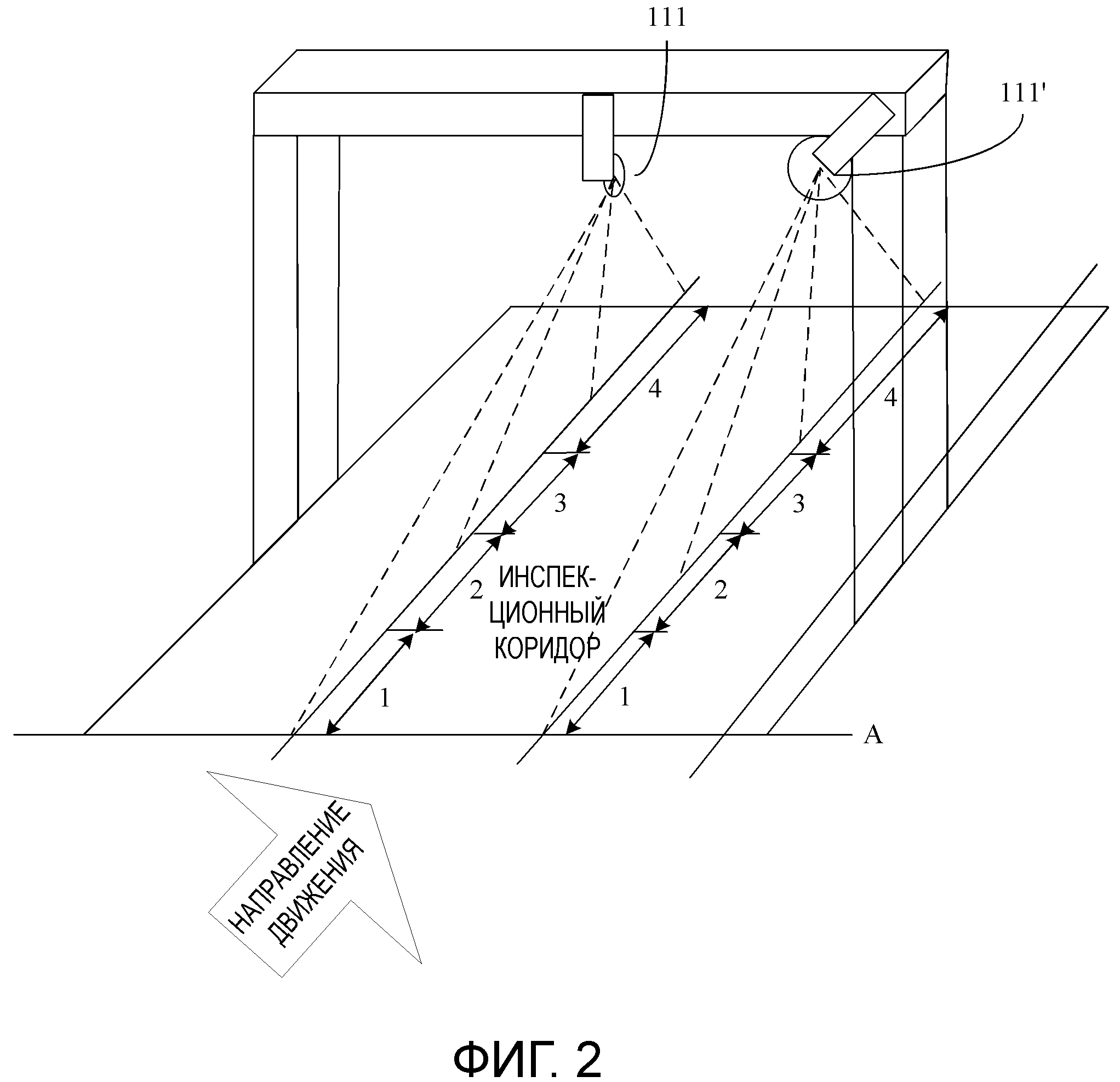
[0033] Фиг. 2 является принципиальной схемой, иллюстрирующей область отслеживания лазерного сканера согласно примеру. Как показано на фиг. 2, лазерный сканер 110 может устанавливаться через два подхода. Для первого подхода, как показано посредством лазерного сканера 111, например, лазерный сканер может располагаться поверх инспекционного коридора, при этом поперечное сечение сканирования является перпендикулярным земле инспекционного коридора. Для второго подхода, как показано посредством лазерного сканера 111', например, лазерный сканер может располагаться сбоку от инспекционного коридора, при этом поперечное сечение сканирования формирует острый угол или тупой угол с землей инспекционного коридора. Лазерный сканер 111 или 111' может отслеживать, по меньшей мере, один движущийся объект с предварительно установленной частотой сканирования, например, 100 Гц (т.е. 100 сканирований в секунду) и одновременно выделять множество лазерных лучей под различными углами за раз. Множество лазерных лучей составляет поперечное сечение сканирования, охватывающее диапазон (область отслеживания лазерного сканера 111 или 111') с начальной точкой A. Диапазон отслеживания лазерного сканера может быть очень широким, в общем, охватывать диапазон непрерывного отслеживания в 80 метров или еще более в направлении вперед и назад.
[0034] В некоторых вариантах осуществления, поскольку при отслеживании движущегося объекта с использованием лазерного сканера 110, лазерный сканер 110 может охватывать очень широкий диапазон отслеживания, во избежание хранения огромного объема необязательных отслеживаемых данных, в общем, до того, как движущийся объект проезжает под лазерным сканером, отслеживаемые данные движущегося объекта не должны обрабатываться до тех пор, пока движущийся объект не достигнет предварительно установленной позиции (соответствующей позиции лазерного сканера). Иными словами, движущийся объект должен рассматриваться как просто въезжающий в область отслеживания из предварительно установленной позиции. На практике, например, предварительно установленная позиция может располагаться, например, в 25 метрах впереди позиции установки лазерного сканера. Тем не менее, настоящее раскрытие сущности не ограничено этим. В дальнейшем описывается требование по минимальному расстоянию между двумя смежными движущимися объектами, соответственно, для вышеуказанных двух подходов к установке.
[0035] Для первого подхода к установке, во-первых предполагается, что лазерный сканер 111 устанавливается на высоте в 5,2 метров, например, и все движущиеся объекты имеют идентичную высоту, например, в 4,8 метра. Когда движущийся объект подъезжает на расстояние в 25 метров от лазерного сканера, движущийся объект рассматривается как просто въезжающий в область отслеживания. Чтобы отслеживать более одного движущегося объекта в области отслеживания одновременно, можно сделать вывод, что минимальное расстояние между двумя смежными движущимися объектами в области отслеживания составляет 2 метра.
[0036] Для второго подхода к установке, аналогично, предполагается, что лазерный сканер 111' устанавливается на высоте в 5,2 метра, например, и все движущиеся объекты имеют идентичную высоту, например, в 4,8 метра. Помимо этого, предполагается, что центральная ось поперечного сечения лазерного сканирования имеет расстояние в 3 метра (этот параметр определяет угол между сечением лазерного сканера и землей) от позиции установки лазерного сканера 111'. Когда движущийся объект подъезжает на расстояние в 25 метров от лазерного сканера, движущийся объект рассматривается как просто въезжающий в область отслеживания. Чтобы отслеживать более одного движущегося объекта в области отслеживания одновременно, можно сделать вывод, что минимальное расстояние между двумя смежными движущимися объектами в области отслеживания составляет 2,5 метра.
[0037] Посредством использования лазерного сканера в качестве устройства, отслеживающего состояние движущегося объекта (к примеру, позиционирование, измерение скорости и т.д.), это устройство является несложным в установке и имеет низкие затраты. В практическом варианте применения, нет необходимости строго выдерживать угол наклона датчика, требуемый посредством правил установки. Угол установки под наклоном не должен влиять на требуемую точность и алгоритм. Помимо этого, лазерный сканер обеспечивает возможность точного измерения низкой скорости движущегося объекта, например, 5 километров в час.
[0038] Модуль 120 обработки выполнен с возможностью, для каждого движущегося объекта в области отслеживания, определять, по меньшей мере, одну фиксированную точку на движущемся объекте и принимать расстояние, по меньшей мере, между одной фиксированной точкой движущегося объекта и позицией испускания лазерных лучей (т.е. позицией установки лазерного сканера 110) и угол испускания соответствующего лазерного луча, все из которых определяются посредством лазерного сканера 110 в каждый момент времени.
[0039] Во-первых, фиксированная точка может выбираться в качестве точки для лазерного сканера 110 с тем, чтобы определять и возвращать переменные данные, например, точку на движущемся объекте с существенным изменением (к примеру, точку на переднем краю или задней части объекта) или точку на определенной высоте объекта. Тем не менее, настоящее раскрытие сущности не ограничено этим.
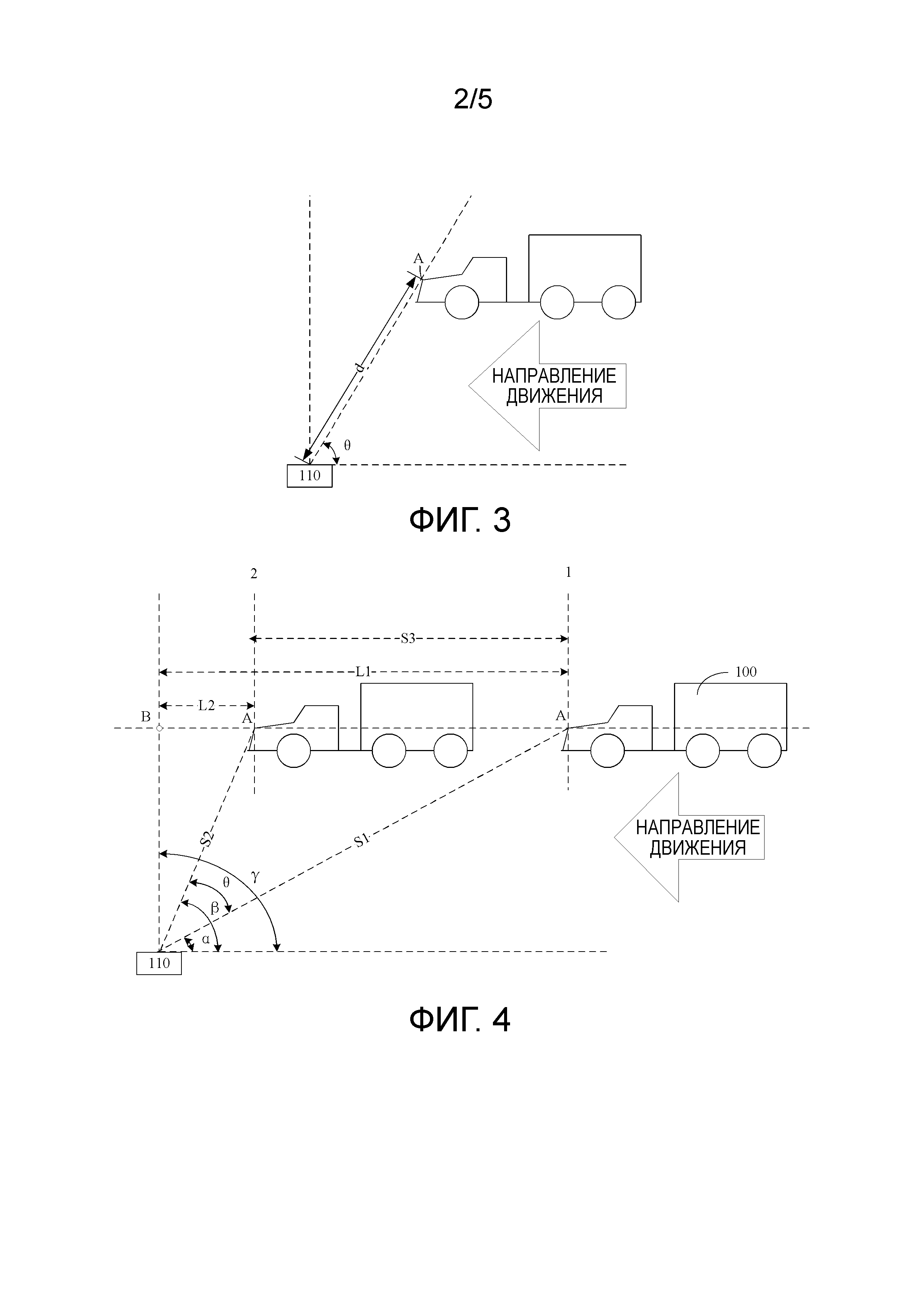
[0040] Обычно, при сканировании движущегося объекта с помощью лазерного сканера 110, лазерный сканер 110 испускает лазерные лучи с различными углами в идентичный момент времени. Когда определенный лазерный луч отражается посредством объекта, может определяться и возвращаться расстояние между точкой отражения и позицией испускания лазерного луча и угол лазерного луча. Фиг. 3 является принципиальной схемой, иллюстрирующей лазерный луч согласно примеру. Как показано на фиг. 3, лазерный сканер 110 может определять и возвращать расстояние d между позицией испускания каждого лазерного луча с углом и позицией отражения лазерного луча (точкой A на переднем краю передней части, как показано на фиг. 3) и соответствующий угол θ испускания.
[0041] Для вышеуказанного движущегося объекта, модуль 120 обработки также выполнен с возможностью определять и выводить относительную позицию движущегося объекта относительно лазерного сканера в каждый момент времени, согласно расстоянию, по меньшей мере, между одной фиксированной точкой движущегося объекта и позицией испускания каждого лазерного луча и углу испускания соответствующего лазерного луча, которые определяются посредством лазерного сканера 110 и принимаются посредством модуля 120 обработки.
[0042] Фиг. 4 является принципиальной схемой, иллюстрирующей способ для определения местоположения движущегося объекта согласно примеру. В качестве примера, как показано на фиг. 4, определенная фиксированная точка A на переднем краю движущегося объекта 100 выбирается в качестве точки для лазерного сканера 110 с тем, чтобы определять и возвращать переменные данные. Как показано на фиг. 4, когда диапазон измерений является пустым, что означает то, что объект не въезжает в область отслеживания, выполняется поиск и сохранение соответствующего угла γ точки, ближайшей к лазерному сканеру 110 (к примеру, точки B, как показано на фиг. 4). Когда движущийся объект 100 расположен в позиции 1, согласно расстоянию S1 между точкой, в которой лазерный сканер 110 определяет и возвращает переменные данные (т.е. фиксированной точкой A, как показано на фиг. 4), и текущей позицией испускания лазерного луча и углу α лазерного луча, которые определяются посредством лазерного сканера 110, относительное расстояние L1 может определяться для позиции 1 относительно лазерного сканера 110, следующим образом:
[0043]  (1)
(1)
[0044] или,
 (2)
(2)
[0045] Когда движущийся объект 100 движется в позицию 2 вдоль направления, как показано посредством стрелки, согласно расстоянию S2 между точкой, в которой лазерный сканер 110 определяет и возвращает переменные данные (т.е. фиксированной точкой A, как показано на фиг. 4), и текущей позицией испускания лазерного луча и углу β лазерного луча, которые определяются посредством лазерного сканера 110 в другое время, относительное расстояние L2 может определяться для позиции 2 относительно лазерного сканера 110, следующим образом:
[0046]  (3)
(3)
[0047] Альтернативно, относительное расстояние L2 между позицией 2 и лазерным сканером 110 может вычисляться из проезжаемого расстояния S3 движущегося объекта между позицией 1 и позицией 2.
[0048] Во-первых, угол θ между S1 и S2 может вычисляться из углов α и β двух лазерных лучей. Затем S3 может вычисляться на основе теоремы косинусов.
[0049]  (4)
(4)
[0050] После этого L2 может вычисляться из L1, которое извлекается из формулы (1): L2=L1-S3.
[0051] Дополнительно, в некоторых вариантах осуществления, чтобы уменьшать объем данных, которые должны обрабатываться посредством модуля 120 обработки, и повышать эффективность их обработки, и одновременно, чтобы акцентировать внимание на отслеживании важного диапазона отслеживания и повышать точность измерения, диапазон отслеживания может разделяться на подобласти, и для различных подобластей, различные интервалы проезжаемого расстояния или временные интервалы могут использоваться для того, чтобы измерять и выводить позиции движущегося объекта. Иными словами, модуль 120 обработки может во-первых определять то, в какой подобласти расположен движущийся объект относительно позиции лазерного сканера, чтобы определять то, какой интервал проезжаемого расстояния или временной интервал должен использоваться для того, чтобы измерять и выводить позиции движущегося объекта. В варианте осуществления, когда движущийся объект движется в направлении к лазерному сканеру, чем меньше относительное расстояние между движущимся объектом и лазерным сканером, тем меньше может быть временной интервал или интервал проезжаемого расстояния. Например, как показано на фиг. 2, область отслеживания может разделяться на четыре подобласти. В этом случае, когда движущийся объект движется в область 3 из четырех подобластей, которая является ближайшей к лазерному сканеру, позиции движущегося объекта могут измеряться и выводиться наиболее часто, т.е. позиция движущегося объекта может измеряться и выводиться один раз в минимальный интервал проезжаемого расстояния или минимальный временной интервал. Конкретное разделение области и выбор частоты вывода могут определяться в зависимости от практического варианта применения, что не ограничено посредством настоящего раскрытия сущности.
[0052] Помимо этого, модуль 120 обработки также выполнен с возможностью, для движущегося объекта, определять и выводить скорость движения движущегося объекта согласно расстоянию, по меньшей мере, между одной фиксированной точкой на движущемся объекте и позицией испускания лазерных лучей и углу испускания соответствующего лазерного луча, которые определяются посредством лазерного сканера 110 и принимаются посредством модуля 120 обработки.
[0053] Например, по-прежнему ссылаясь на фиг. 4, как пояснено выше, после того, как определяются относительные расстояния L1 и L2 позиции 1 и позиции 2 движущегося объекта 100 и лазерного сканера, или определяется проезжаемое расстояние S3 между L1 и L2, скорость v движущегося объекта 100 может вычисляться на основе следующей формулы:
[0054]  , (5)
, (5)
[0055] где T1 и T2 являются, соответственно, моментами времени, когда движущийся объект 100 достигает позиции 1 и позиции 2. Моменты времени могут получаться, например, из формулы для вычисления времени, которая, по сути, предоставлена в модуле 120 обработки. Например, момент времени, когда принимается первое расстояние S1, помечается в качестве T1, а момент времени, когда принимается второе расстояние S2, помечается в качестве T2. Альтернативно, моменты времени также могут получаться согласно моментам времени, которые переносятся в блоке данных, возвращаемом посредством лазерного сканера 110.
[0056] В некоторых вариантах осуществления, может выбираться более одной фиксированной точки, например, более одной точки для возврата переменных данных (к примеру, точки на различных высотах движущегося объекта или множество различных точек на движущемся объекте). Затем после того, как вышеуказанные проезжаемые расстояния вычисляются на основе фиксированных точек, проезжаемые расстояния могут подбираться, например, усредняться. Скорость движущегося объекта может вычисляться из результирующего среднего значения проезжаемых расстояний. Это позволяет повышать точность для скорости посредством измерения более одной фиксированной точкой.
[0057] Помимо этого, скорость движущегося объекта может определяться и выводиться посредством разделения подобластей. Иными словами, скорость движущегося объекта может определяться и выводиться с различными интервалами проезжаемого расстояния или временными интервалами в зависимости от относительной позиции движущегося объекта относительно лазерного сканера 110.
[0058] Модуль 120 обработки также может быть выполнен с возможностью определять текущее направление движения каждого движущегося объекта. Например, модуль 120 обработки может определять направление движения движущегося объекта в текущий момент времени согласно различным относительным позициям движущегося объекта относительно лазерного сканера 110 в текущий момент времени и в предыдущий момент времени. Во-первых, например, модуль 120 обработки может распознавать то, движущийся объект в данный момент движется в направлении к лазерному сканеру 110 или в направлении от лазерного сканера 110, согласно углам в данных, возвращаемых посредством лазерного сканера 110. Когда движущийся объект движется в направлении к лазерному сканеру 110, если расстояние между движущимся объектом и лазерным сканером 110 в текущий момент времени меньше расстояния между движущимся объектом и лазерным сканером 110 в предыдущий момент времени, можно считать, что движущийся объект движется вперед; иначе, если расстояние между движущимся объектом и лазерным сканером 110 в текущий момент времени превышает расстояние между движущимся объектом и лазерным сканером 110 в предыдущий момент времени, можно считать, что движущийся объект движется назад; либо если расстояние между движущимся объектом и лазерным сканером 110 в текущий момент времени равно расстоянию между движущимся объектом и лазерным сканером 110 в предыдущий момент времени, можно считать, что движущийся объект прекращает движение. Когда движущийся объект движется в направлении от лазерного сканера 110, если расстояние между движущимся объектом и лазерным сканером 110 в текущий момент времени превышает расстояние между движущимся объектом и лазерным сканером 110 в предыдущий момент времени, можно считать, что движущийся объект движется вперед; иначе, если расстояние между движущимся объектом и лазерным сканером 110 в текущий момент времени меньше расстояния между движущимся объектом и лазерным сканером 110 в предыдущий момент времени, можно считать, что движущийся объект движется назад.
[0059] Помимо этого, модуль 120 обработки также может быть выполнен с возможностью непосредственно определять направление движения согласно разности между двумя углами лазерных лучей, возвращаемых в два момента времени. Например, когда движение выполняется в направлении к лазерному сканеру 110, угол лазерного луча должен становиться все меньшим; а когда движение выполняется в направлении от лазерного сканера 110, угол лазерного луча должен становиться все большим.
[0060] На основе определения скорости движения движущегося объекта, может быть легко обнаружено то, находится или нет движущийся объект в анормальном состоянии, таком как движение назад или остановка в инспекционном коридоре, таким образом, движущийся объект может быть быстро обработан.
[0061] Посредством позиционирования или измерения скорости движущегося объекта с использованием лазерного сканера, устройство для отслеживания состояния движущегося объекта, предоставленное посредством настоящего раскрытия сущности, позволяет значительно повышать точность измерения низкой скорости движущегося объекта по сравнению с датчиком измерения скорости, таким как радар. Кроме того, лазерный сканер является простым в установке и имеет низкие затраты. Помимо этого, лазерный сканер также может легко определять анормальное состояние (такое как движение назад или остановка в инспекционном коридоре) движущегося объекта, чтобы обеспечивать возможность быстрой обработки движущегося объекта.
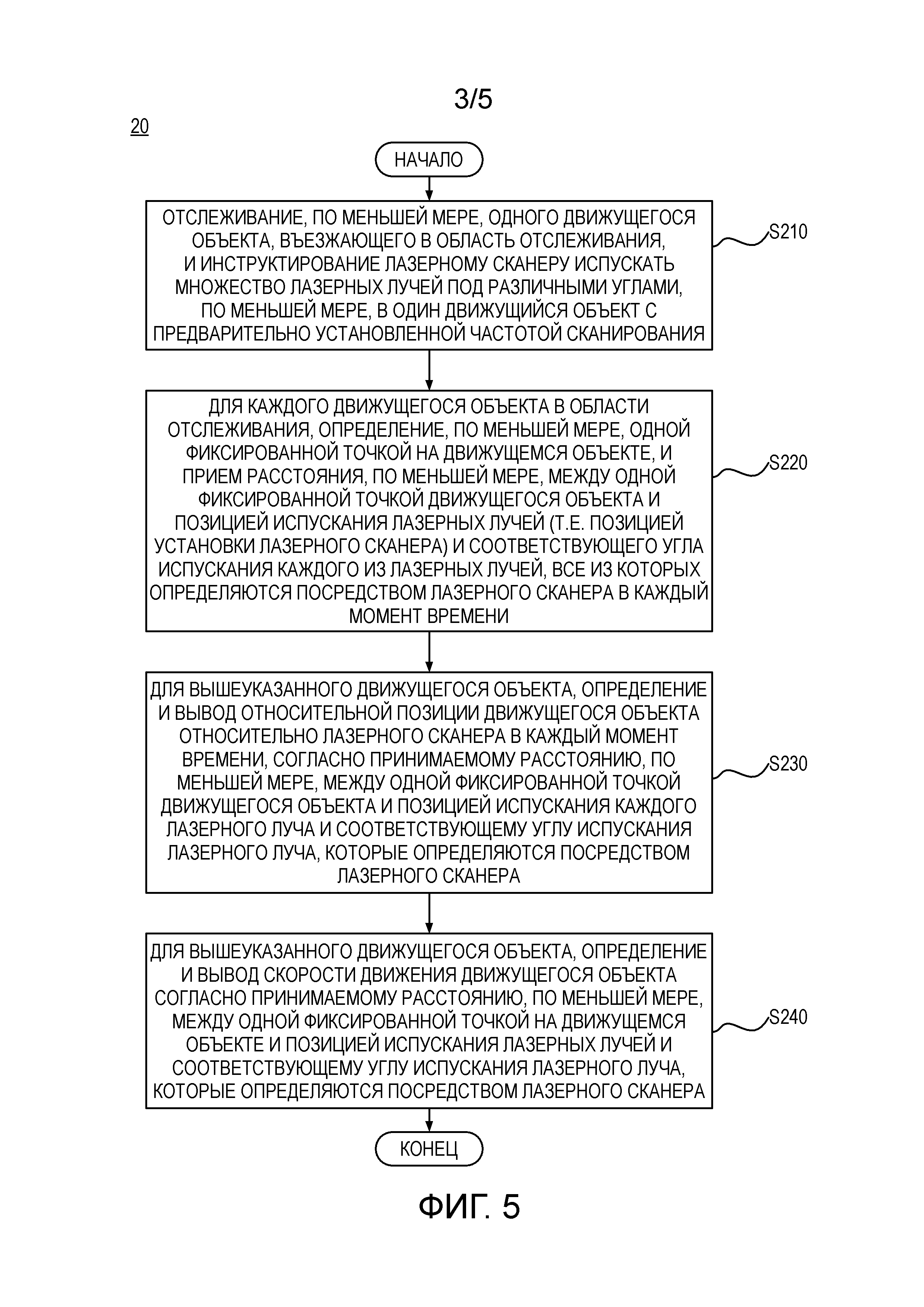
[0062] Фиг. 5 является блок-схемой последовательности операций, иллюстрирующей способ для отслеживания состояния движущегося объекта на основе лазерного сканера согласно примерному варианту осуществления. Как показано на фиг. 5, способ 20 включает в себя следующие этапы.
[0063] На этапе S210, отслеживается, по меньшей мере, один движущийся объект, въезжающий в область отслеживания, лазерному сканеру инструктируется испускать множество лазерных лучей под различными углами, по меньшей мере, в один движущийся объект с предварительно установленной частотой сканирования.
[0064] Фиг. 2 является принципиальной схемой, иллюстрирующей область отслеживания лазерного сканера согласно примеру. Как показано на фиг. 2, лазерный сканер может устанавливаться через два подхода. Для первого подхода, как показано посредством лазерного сканера 111, например, лазерный сканер может располагаться поверх инспекционного коридора, при этом поперечное сечение сканирования является перпендикулярным земле инспекционного коридора. Для второго подхода, как показано посредством лазерного сканера 111', например, лазерный сканер может располагаться сбоку от инспекционного коридора, при этом поперечное сечение сканирования формирует острый угол или тупой угол с землей инспекционного коридора. Лазерный сканер 111 или 111' может отслеживать, по меньшей мере, один движущийся объект с предварительно установленной частотой сканирования, например, 100 Гц (т.е. 100 сканирований в секунду) и одновременно выделять множество лазерных лучей под различными углами за раз. Множество лазерных лучей составляет поперечное сечение сканирования, охватывающее диапазон (область отслеживания лазерного сканера 111 или 111') с начальной точкой A. Диапазон отслеживания лазерного сканера может быть очень широким, в общем, охватывать диапазон непрерывного отслеживания в 80 метров или еще более в направлении вперед и назад.
[0065] В некоторых вариантах осуществления, поскольку при отслеживании движущегося объекта с использованием лазерного сканера, лазерный сканер может охватывать очень широкий диапазон отслеживания, во избежание хранения огромного объема необязательных отслеживаемых данных, в общем, до того, как движущийся объект проезжает под лазерным сканером, отслеживаемые данные движущегося объекта не должны обрабатываться до тех пор, пока движущийся объект не достигнет предварительно установленной позиции (соответствующей позиции лазерного сканера). Иными словами, движущийся объект должен рассматриваться как просто въезжающий в область отслеживания из предварительно установленной позиции. На практике, например, предварительно установленная позиция может располагаться, например, в 25 метрах впереди позиции установки лазерного сканера. Тем не менее, настоящее раскрытие сущности не ограничено этим. В дальнейшем описывается требование по минимальному расстоянию между двумя смежными движущимися объектами, соответственно, для вышеуказанных двух подходов к установке.
[0066] Для первого подхода к установке, во-первых предполагается, что лазерный сканер 111 устанавливается на высоте в 5,2 метров, например, и все движущиеся объекты имеют идентичную высоту, например, в 4,8 метра. Когда движущийся объект подъезжает на расстояние в 25 метров от лазерного сканера, движущийся объект рассматривается как просто въезжающий в область отслеживания. Чтобы отслеживать более одного движущегося объекта в области отслеживания одновременно, можно сделать вывод, что минимальное расстояние между двумя смежными движущимися объектами в области отслеживания составляет 2 метра.
[0067] Для второго подхода к установке, аналогично, предполагается, что лазерный сканер 111' устанавливается на высоте в 5,2 метра, например, и все движущиеся объекты имеют идентичную высоту, например, в 4,8 метра. Помимо этого, предполагается, что центральная ось поперечного сечения лазерного сканирования имеет расстояние в 3 метра (этот параметр определяет угол между поперечным сечением лазерного сканирования и землей) от позиции установки лазерного сканера 111'. Когда движущийся объект подъезжает на расстояние в 25 метров от лазерного сканера, движущийся объект рассматривается как просто въезжающий в область отслеживания. Чтобы отслеживать более одного движущегося объекта в области отслеживания одновременно, можно сделать вывод, что минимальное расстояние между двумя смежными движущимися объектами в области отслеживания составляет 2,5 метра.
[0068] Посредством использования лазерного сканера в качестве устройства для отслеживания состояния движущегося объекта (к примеру, позиционирование, измерение скорости и т.д.), это устройство является несложным в установке и имеет низкие затраты. В практическом варианте применения, нет необходимости строго выдерживать угол наклона датчика, требуемый посредством правил установки. Угол установки под наклоном не должен влиять на требуемую точность и алгоритм. Помимо этого, лазерный сканер обеспечивает возможность точного измерения низкой скорости движущегося объекта, например, 5 километров в час.
[0069] На этапе S220, для каждого движущегося объекта в области отслеживания, определяется, по меньшей мере, одна фиксированная точка на движущемся объекте, и принимается расстояние, по меньшей мере, между одной фиксированной точкой движущегося объекта и позицией испускания лазерных лучей (т.е. позицией установки лазерного сканера) и угол испускания соответствующего лазерного луча, все из которых определяются посредством лазерного сканера в каждый момент времени.
[0070] Во-первых, фиксированная точка может выбираться в качестве точки для лазерного сканера с тем, чтобы определять и возвращать переменные данные, например, точку на движущемся объекте с существенным изменением (к примеру, точку на переднем краю или задней части объекта) или точку на определенной высоте объекта. Тем не менее, настоящее раскрытие сущности не ограничено этим.
[0071] Обычно, при сканировании движущегося объекта с помощью лазерного сканера, лазерный сканер испускает лазерные лучи с различными углами в идентичный момент времени. Когда определенный лазерный луч отражается посредством объекта, может определяться и возвращаться расстояние между точкой отражения и позицией испускания лазерного луча и угол лазерного луча. Фиг. 3 является принципиальной схемой, иллюстрирующей лазерный луч согласно примеру. Как показано на фиг. 3, лазерный сканер может определять и возвращать расстояние d между позицией испускания каждого лазерного луча с углом и позицией отражения лазерного луча (точкой A на переднем краю передней части, как показано на фиг. 3) и соответствующий угол θ испускания.
[0072] На этапе S230, для вышеуказанного движущегося объекта, относительная позиция движущегося объекта относительно лазерного сканера в каждый момент времени определяется и выводится, согласно принимаемому расстоянию, по меньшей мере, между одной фиксированной точкой движущегося объекта и позицией испускания каждого лазерного луча и углу испускания соответствующего лазерного луча, которые определяются посредством лазерного сканера.
[0073] Фиг. 4 является принципиальной схемой, иллюстрирующей способ для определения местоположения движущегося объекта согласно примеру. В качестве примера, как показано на фиг. 4, определенная фиксированная точка A на переднем краю движущегося объекта 100 выбирается в качестве точки для лазерного сканера 110 с тем, чтобы определять и возвращать переменные данные. Как показано на фиг. 4, когда диапазон измерений является пустым, что означает то, что объект не въезжает в область отслеживания, выполняется поиск и сохранение соответствующего угла γ точки, ближайшей к лазерному сканеру 110 (к примеру, точки B, как показано на фиг. 4). Когда движущийся объект 100 расположен в позиции 1, согласно расстоянию S1 между точкой, в которой лазерный датчик определяет и возвращает переменные данные (т.е. фиксированной точкой A, как показано на фиг. 4), и текущей позицией испускания лазерного луча и углу α лазерного луча, которые определяются посредством лазерного датчика, относительное расстояние L1 может определяться для позиции 1 относительно лазерного датчика, следующим образом:
[0074]  (1)
(1)
[0075] или,
 (2)
(2)
[0076] Когда движущийся объект 100 движется в позицию 2 вдоль направления, как показано посредством стрелки, согласно расстоянию S2 между точкой, в которой лазерный сканер 110 определяет и возвращает переменные данные (т.е. фиксированной точкой A, как показано на фиг. 4), и текущей позицией испускания лазерного луча и углу β лазерного луча, которые определяются посредством лазерного сканера 110 в другое время, относительное расстояние L2 может определяться для позиции 2 относительно лазерного датчика, следующим образом:
[0077]  (3)
(3)
[0078] Альтернативно, позиция 2 может вычисляться из проезжаемого расстояния S3 движущегося объекта между позицией 1 и позицией 2.
[0079] Во-первых, угол θ между S1 и S2 может вычисляться из углов α и β двух лазерных лучей. Затем S3 может вычисляться на основе теоремы косинусов.
[0080]  (4)
(4)
[0081] После этого, L2 может вычисляться из L1, которое извлекается из формулы (1): L2=L1-S3.
[0082] В некоторых вариантах осуществления, чтобы уменьшать объем данных, которые должны обрабатываться, и повышать эффективность обработки, и одновременно, чтобы акцентировать внимание на отслеживании важного диапазона отслеживания и повышать точность измерения, диапазон отслеживания может разделяться на подобласти, и для различных подобластей, различные интервалы проезжаемого расстояния или временные интервалы могут использоваться для того, чтобы измерять и выводить позиции движущегося объекта. Иными словами, может во-первых определяться то, в какой подобласти расположен движущийся объект относительно позиции лазерного сканера, чтобы определять то, какой интервал проезжаемого расстояния или временной интервал должен использоваться для того, чтобы измерять и выводить позиции движущегося объекта. В варианте осуществления, когда движущийся объект движется в направлении к лазерному сканеру, чем меньше относительное расстояние между движущимся объектом и лазерным сканером, тем меньше может быть временной интервал или интервал проезжаемого расстояния. Например, как показано на фиг. 2, область отслеживания может разделяться на четыре подобласти. В этом случае, когда движущийся объект движется в область 3 из четырех подобластей, которая является ближайшей к лазерному сканеру, позиции движущегося объекта могут измеряться и выводиться наиболее часто, т.е. позиция движущегося объекта может измеряться и выводиться один раз в минимальный интервал проезжаемого расстояния или минимальный временной интервал. Конкретное разделение области и выбор частоты вывода могут определяться в зависимости от практического варианта применения, что не ограничено посредством настоящего раскрытия сущности.
[0083] В дополнение к позиционированию движущегося объекта, текущее направление движения каждого движущегося объекта также может определяться в любой момент времени. Например, направление движения движущегося объекта в текущий момент времени может определяться согласно различным относительным позициям движущегося объекта относительно лазерного сканера в текущий момент времени и в предыдущий момент времени. Во-первых, например, может распознаваться то, движущийся объект в данный момент движется в направлении к лазерному сканеру или в направлении от лазерного сканера, согласно углам в данных, возвращаемых посредством лазерного сканера. Когда движущийся объект движется в направлении к лазерному сканеру, если расстояние между движущимся объектом и лазерным сканером 110 в текущий момент времени меньше расстояния между движущимся объектом и лазерным сканером в предыдущий момент времени, можно считать, что движущийся объект движется вперед; иначе, если расстояние между движущимся объектом и лазерным сканером в текущий момент времени превышает расстояние между движущимся объектом и лазерным сканером в предыдущий момент времени, можно считать, что движущийся объект движется назад; либо если расстояние между движущимся объектом и лазерным сканером в текущий момент времени равно расстоянию между движущимся объектом и лазерным сканером в предыдущий момент времени, можно считать, что движущийся объект прекращает движение. Когда движущийся объект движется в направлении от лазерного сканера, если расстояние между движущимся объектом и лазерным сканером в текущий момент времени превышает расстояние между движущимся объектом и лазерным сканером в предыдущий момент времени, можно считать, что движущийся объект движется вперед; иначе, если расстояние между движущимся объектом и лазерным сканером в текущий момент времени меньше расстояния между движущимся объектом и лазерным сканером в предыдущий момент времени, можно считать, что движущийся объект движется назад.
[0084] Помимо этого, направление движения также может непосредственно определяться согласно разности между двумя углами лазерных лучей, возвращаемых в два момента времени. Например, когда движение выполняется в направлении к лазерному сканеру, угол возвращаемого лазерного луча должен становиться все меньшим; а когда движение выполняется в направлении от лазерного сканера, угол возвращаемого лазерного луча должен становиться все большим.
[0085] На основе определения скорости движения движущегося объекта, может быть легко обнаружено то, находится или нет движущийся объект в анормальном состоянии, таком как движение назад или остановка в инспекционном коридоре, таким образом, движущийся объект может быть быстро обработан.
[0086] На этапе S240, для движущегося объекта, скорость движения движущегося объекта определяется и выводится согласно принимаемому расстоянию, по меньшей мере, между одной фиксированной точкой на движущемся объекте и позицией испускания лазерных лучей и углу испускания соответствующего лазерного луча, которые определяются посредством лазерного сканера.
[0087] Например, по-прежнему ссылаясь на фиг. 4, как пояснено выше, после того, как определяются относительные расстояния L1 и L2 позиции 1 и позиции 2 движущегося объекта 100 и лазерного сканера, или определяется проезжаемое расстояние S3 между L1 и L2, скорость v движущегося объекта 100 может вычисляться на основе следующей формулы:
[0088]  , (5)
, (5)
[0089] где T1 и T2 являются, соответственно, моментами времени, когда движущийся объект 100 достигает позиции 1 и позиции 2. Моменты времени могут получаться посредством лазерного сканера.
[0090] В некоторых вариантах осуществления, может выбираться более одной фиксированной точки, например более одной точки для возврата переменных данных (к примеру, точки на различных высотах движущегося объекта или множество различных точек с существенным изменением на движущемся объекте). Затем после того, как вышеуказанные проезжаемые расстояния вычисляются на основе фиксированных точек, проезжаемые расстояния могут подбираться, например, усредняться. Скорость движущегося объекта может вычисляться из результирующего среднего значения проезжаемых расстояний. Это позволяет повышать точность для скорости посредством измерения более одной фиксированной точкой.
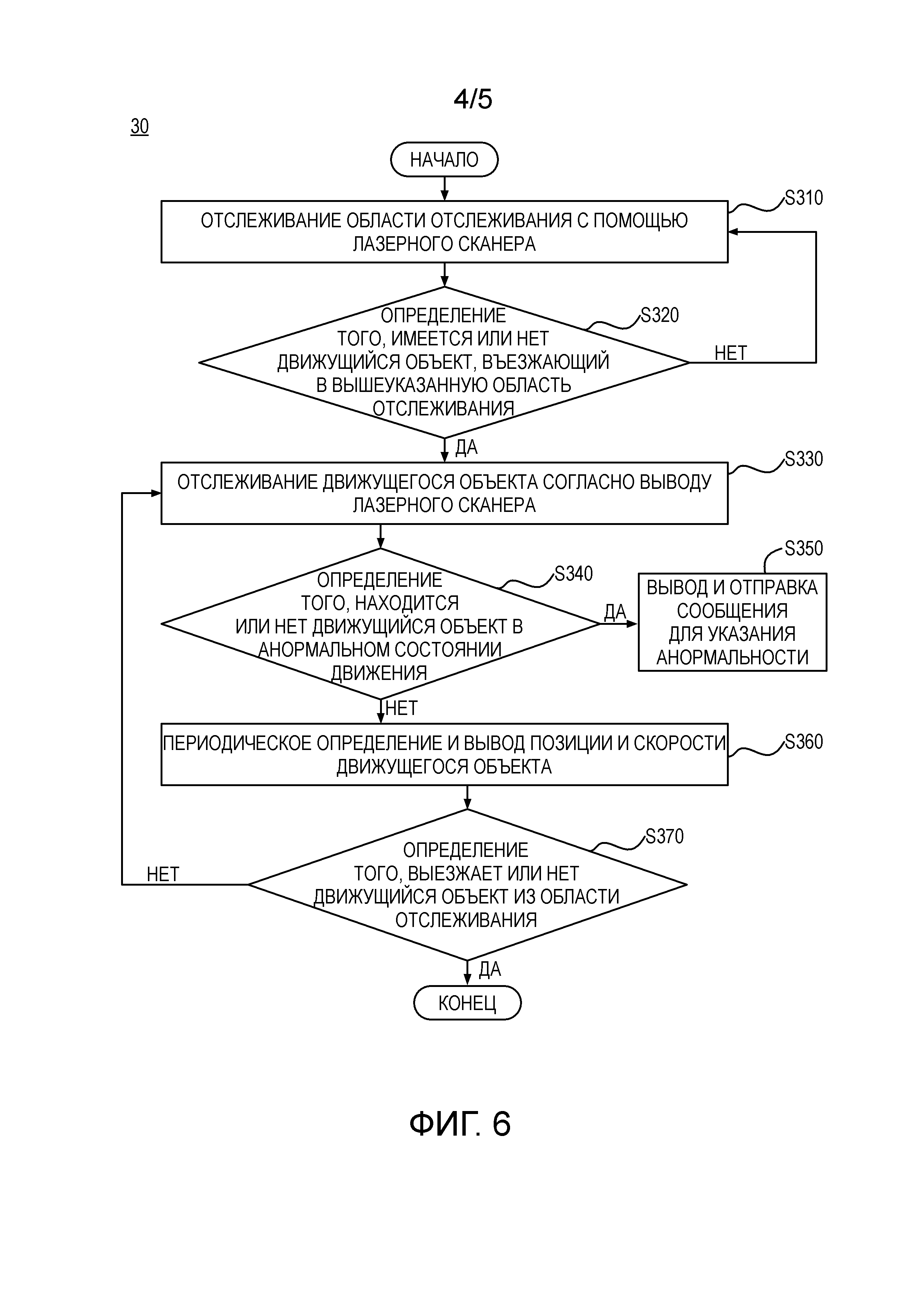
[0091] Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей способ для отслеживания состояния движущегося объекта на основе лазерного сканера согласно другому примерному варианту осуществления. Как показано на фиг. 6, способ 30 включает в себя следующие этапы.
[0092] На этапе S310, область отслеживания отслеживается с помощью лазерного сканера.
[0093] Область отслеживания может представлять собой, например, максимальный диапазон, охватываемый посредством поперечного сечения сканирования вышеуказанного лазерного сканера. Альтернативно, область отслеживания может быть заранее оптимизирована, чтобы исключать хранение необязательных отслеживаемых данных.
[0094] Помимо этого, отслеживание может проводиться посредством лазерного сканера или посредством катушек наземных датчиков, световых завес и т.п.
[0095] На этапе S320, определяется то, имеется или нет движущийся объект, въезжающий в вышеуказанную область отслеживания. Если имеется движущийся объект, въезжающий в вышеуказанную область отслеживания, выполняется этап S330; иначе процесс возвращается к этапу S310.
[0096] На этапе S330, движущийся объект отслеживается согласно выводу лазерного сканера.
[0097] На этапе S340, определяется то, находится или нет движущийся объект в анормальном состоянии движения. Если движущийся объект находится в нормальном состоянии движения, выполняется этап S360; иначе выполняется этап S350.
[0098] Анормальное состояние движения движущегося объекта может включать в себя, например, движение назад или остановку в инспекционном коридоре движущегося объекта. Конкретный способ для определения анормального состояния движения пояснен выше, и он не повторяется в данном документе.
[0099] На этапе S350, сообщение для указания анормальности выводится и отправляется.
[00100] На этапе S360, позиция и скорость движущегося объекта могут периодически определяться и выводиться.
[00101] Способ для определения позиции и скорости движущегося объекта пояснен выше, и он не повторяется в данном документе. Период может быть фиксированным периодом. Альтернативно, различные интервалы проезжаемого расстояния или временные интервалы могут задаваться для различных подобластей, соответственно, как пояснено выше.
[00102] На этапе S370, определяется то, выезжает или нет движущийся объект из области отслеживания. Если движущийся объект выезжает из области отслеживания, отслеживание движущегося объекта завершается; иначе процесс возвращается к этапу S330.
[00103] Например, можно определять то, выезжает или нет движущийся объект из области отслеживания, через данные задней части движущегося объекта, которые возвращаются посредством лазерного сканера. Альтернативно, определение может выполняться посредством катушек наземных датчиков и световых завес, что не ограничивается в настоящем раскрытии сущности.
[00104] Посредством позиционирования или измерения скорости движущегося объекта с использованием лазерного сканера, способ для отслеживания состояния движущегося объекта, предоставленный посредством настоящего раскрытия сущности, позволяет значительно повышать точность измерения низкой скорости движущегося объекта по сравнению с датчиком измерения скорости, таким как радар. Кроме того, лазерный сканер является простым в установке и имеет низкие затраты. Помимо этого, лазерный сканер также может легко определять анормальное состояние (такое как движение назад или остановка в инспекционном коридоре) движущегося объекта, чтобы обеспечивать возможность быстрой обработки движущегося объекта.
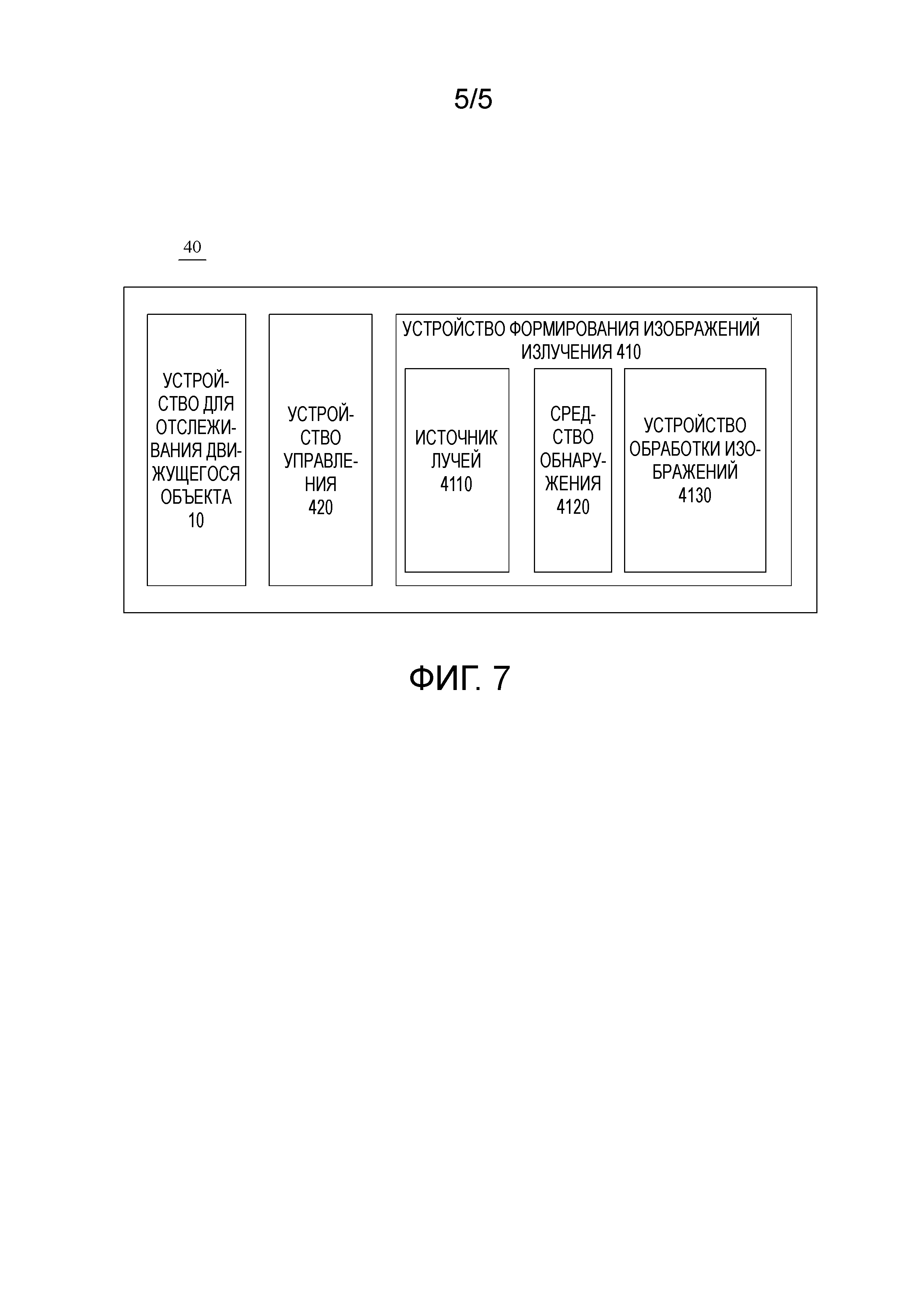
[00105] Фиг. 7 является блок-схемой, иллюстрирующей систему для быстрой инспекции транспортного средства согласно примерному варианту осуществления. Как показано на фиг. 7, система 40 для быстрой инспекции транспортного средства включает в себя устройство 410 формирования изображений излучения, устройство 10 для отслеживания движущегося объекта и устройство 420 управления.
[00106] В варианте осуществления, устройство 410 формирования изображений излучения включает в себя источник 4110 лучей, выполненный с возможностью испускать лучи излучения для обнаружения рассматриваемого транспортного средства; средство 4120 обнаружения, выполненное с возможностью обнаруживать лучи излучения, передаваемые через рассматриваемое транспортное средство, и/или рассеянные лучи излучения; и устройство 4130 обработки изображений, выполненное с возможностью представлять изображения согласно сигналам лучей излучения, обнаруженных посредством средства 4120 обнаружения.
[00107] Устройство 10 для отслеживания движущегося объекта, как пояснено выше, выполнен ос возможностью отслеживать состояние движения рассматриваемого транспортного средства в системе 40 для быстрой инспекции транспортного средства, например, определять то, является или нет состояние рассматриваемого транспортного средства анормальным (такое как движение назад или остановка в инспекционном коридоре), чтобы определять позицию рассматриваемого транспортного средства, определять скорость движения рассматриваемого транспортного средства и т.д. Подробное описание устройства 10 для отслеживания движущегося объекта может ссылаться на вышеприведенное, что не повторяется в данном документе.
[00108] Устройство 420 управления выполнено с возможностью управлять устройством 410 формирования изображений излучения таким образом, чтобы испускать лучи излучения в рассматриваемое транспортное средство согласно выводу устройства 10 для отслеживания движущегося объекта. Например, устройство 420 управления может позиционировать кабину рассматриваемого транспортного средства через устройство 10 для отслеживания движущегося объекта, определять то, выезжает или нет кабина из позиции испускания лучей излучения, и начинать испускать лучи излучения в рассматриваемое транспортное средство после того, как он определяет то, что кабина выезжает из позиции испускания лучей. Альтернативно, устройство 420 управления также может определять время испускания лучей согласно информации позиции, информации скорости, выведенной посредством устройства 10 для отслеживания движущегося объекта в комбинации с информацией длины, и информации модели рассматриваемого транспортного средства.
[00109] Посредством использования устройства для отслеживания движущегося объекта, система для быстрой инспекции транспортного средства настоящего раскрытия сущности позволяет повышать точность в определении времени для испускания лучей излучения, с тем чтобы эффективно исключать риск нарушения для водителя, вызываемый посредством ошибочного определения передней части рассматриваемого транспортного средства.
[00110] Выше проиллюстрированы и описаны примерные варианты осуществления настоящего раскрытия сущности. Следует понимать, что настоящее раскрытие сущности не ограничено раскрытыми вариантами осуществления. Вместо этого, настоящее раскрытие сущности имеет намерение охватывать все изменения и эквивалентные замены в пределах объема прилагаемой формулы изобретения.
Сканирующее устройство с использованием пучка излучения для формирования изображения в режиме обратного рассеяния и способ его осуществления
Контрольное устройство миллиметрового диапазона
Сканирующее устройство и способ визуализации с обратнорассеянным пучком излучения
Устройство для приема миллиметровых волн
Устройство для испускания лучей и система формирования изображений с данным устройством
Системы и способы осмотра на основе обратного рассеяния для тела человека
Стационарное устройство компьютерной томографии
Устройство и способ лучевой сканирующей визуализации
Детектор и использующий его способ одновременного обнаружения гамма-излучения и нейтронов
Способы реконструкции рентгеновской двухэнергетической компьютерной томографии
Самоходная система лучевого контроля
Способ и система быстрого досмотра транспортного средства
Система управления направлением движения транспортного средства, способ для ориентирования транспортного средства и инспекционное транспортное средство
Способ и система идентификации номера контейнера
Способ и система для идентификации номера и типа вагона и способ и система для инспекции безопасности

