Результат интеллектуальной деятельности: Устройство управления для транспортного средства с электрическим приводом
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
1. ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к устройству управления для транспортного средства с электрическим приводом, которое может двигаться с использованием электромотора в качестве источника мощности приведения в движение.
2. ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0002] Например, в случае если трехфазный синхронный электромотор используется в качестве электромотора, иногда возникает состояние, называемое "однофазной блокировкой". Однофазная блокировка представляет собой состояние, в котором в течение предварительно определенного периода значение тепловой нагрузки, сформированной в электромоторе, составляет предварительно определенное значение или более, и в котором тепловая нагрузка ухудшает рабочие характеристики и надежность электрических схем или электронных схем электромотора и устройств управления для электромотора, таких как инвертор. Публикация заявки на патент Японии номер 2006-256560 описывает устройство, выполненное с возможностью не допускать или подавлять такое состояние. Устройство, описанное в JP 2006-256560 А, в котором средство зацепления предусмотрено между вращательным валом и ведущим валом вращающейся машины, к примеру, мотора, выполнено с возможностью управлять средством зацепления в состояние проскальзывания в случае определения того, что возникает однофазная блокировка или аналогичное состояние. Когда средство зацепления управляется в состояние проскальзывания, скорость вращения вращающейся машины становится более высокой скоростью вращения, чем скорость вращения, при которой возникает однофазная блокировка, и следовательно, можно не допускать или подавлять протекание большого электрического тока только через одну фазу либо не допускать или подавлять повышение температур устройств управления, таких как инвертор, для управления вращающейся машиной. Дополнительно, необязательно ограничивать электрический ток для защиты электромотора, инвертора и т.п., и следовательно, можно не допускать или подавлять снижение крутящего момента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Когда средство зацепления управляется в состояние проскальзывания, как описано в JP 2006-256560 А, можно передавать крутящий момент в зависимости от состояния проскальзывания, обеспечивая возможность высокой скорости вращения вращающейся машины. Как описано в JP 2006-256560 А, состояние проскальзывания средства зацепления задается посредством выполнения управления с обратной связью давлением для зацепления (или силой зацепления) таким образом, что получается целевая перегрузочная способность по передаваемому крутящему моменту. Иными словами, если перегрузочная способность по передаваемому крутящему моменту средства зацепления превышает целевое значение, давление для зацепления управляется таким образом, что оно снижается, и наоборот, если перегрузочная способность по передаваемому крутящему моменту средства зацепления меньше целевого значения, давление для зацепления управляется таким образом, что оно увеличивается. Соответственно, в ходе управления, фактическая перегрузочная способность по передаваемому крутящему моменту, хотя и временно, становится больше целевого значения, что приводит к неизбежному запаздыванию реакции. Следовательно, даже когда средство зацепления управляется в предварительно определенное состояние проскальзывания для недопущения однофазной блокировки, запаздывание в управлении или реакции формирует ситуацию, в которой проскальзывание средства зацепления является недостаточным, и скорость вращения вращающейся машины чрезмерно понижается. Иными словами, имеется вероятность того, что надежное недопущение или достаточное подавление однофазной блокировки не могут выполняться.
[0004] Средство зацепления, описанное в JP 2006-256560 А, может расцепляться вместо управления в состояние проскальзывания. Когда средство зацепления расцепляется, имеется незначительная нагрузка, которая прикладывается к вращающейся машине, и следовательно, скорость вращения не снижается чрезмерно. Тем не менее, вследствие расцепления средства зацепления, крутящий момент не передается. Следовательно, крутящий момент ведущего вала становится нулевым, и имеется вероятность того, что не получается даже крутящий момент приведения в движение, получаемый, когда возникает однофазная блокировка.
[0005] Изобретение предоставляет устройство управления для транспортного средства с электрическим приводом, которое не допускает или подавляет, без потери крутящего момента приведения в движение, возникновение так называемого состояния однофазной блокировки, которое представляет собой рабочее состояние, в котором в течение предварительно определенного периода значение тепловой нагрузки в электромоторе составляет предварительно определенное значение или более.
[0006] Предусмотрено устройство управления для транспортного средства с электрическим приводом согласно аспекту изобретения. Транспортное средство с электрическим приводом включает в себя ведущее колесо, источник мощности приведения в движение и тракт передачи мощности приведения в движение. Источник мощности приведения в движение включает в себя электромотор. Тракт передачи мощности приведения в движение выполнен с возможностью передавать мощность приведения в движение, сформированную посредством источника мощности приведения в движение, на ведущее колесо. Устройство управления включает в себя механизм передачи динамической мощности и электронный блок управления. Механизм передачи динамической мощности предоставляется на тракте передачи мощности приведения в движение. Механизм передачи динамической мощности включает в себя элемент на приводящей стороне, элемент на приводимой стороне, гидравлическое сцепление (гидравлическую муфту) и зацепляющий механизм. Элемент на приводящей стороне сцепляется с электромотором. Элемент на приводимой стороне сцепляется с ведущим колесом. Гидравлическое сцепление выполнено так, что крутящий момент передается через жидкость в то время, когда элемент на приводящей стороне и элемент на приводимой стороне относительно вращаются. Зацепляющий механизм выполнен с возможностью сцеплять элемент на приводящей стороне и элемент на приводимой стороне. Электронный блок управления выполнен с возможностью определять то, становится или нет рабочее состояние электромотора рабочим состоянием, в котором значение тепловой нагрузки составляет предварительно определенное значение или более, причем тепловая нагрузка является тепловой нагрузкой, которая формируется в электромоторе в течение предварительно определенного периода. Электронный блок управления выполнен с возможностью управлять механизмом передачи динамической мощности таким образом, чтобы выполнять управление проскальзыванием так, что скорость вращения электромотора является более высокой скоростью вращения, чем скорость вращения электромотора в данный момент времени, и скорость относительного вращения в гидравлическом сцеплении увеличивается, в случае определения того, что рабочее состояние электромотора становится рабочим состоянием, в котором значение тепловой нагрузки составляет предварительно определенное значение или более, причем момент времени является моментом времени, когда рабочее состояние электромотора становится рабочим состоянием, в котором значение тепловой нагрузки составляет предварительно определенное значение или более.
[0007] В устройстве управления согласно аспекту зацепляющий механизм может представлять собой муфту, которая непрерывно изменяет перегрузочную способность по передаваемому крутящему моменту. Электронный блок управления может быть выполнен с возможностью снижать перегрузочную способность по передаваемому крутящему моменту муфты в качестве управления проскальзыванием.
[0008] В аспекте рабочее состояние, в котором значение тепловой нагрузки составляет предварительно определенное значение или более, может представлять собой рабочее состояние, в котором значение крутящего момента или электрического тока электромотора находится в предварительно определенном диапазоне, и в котором скорость вращения электромотора составляет заранее определенную скорость вращения или ниже. Электронный блок управления может быть выполнен с возможностью определять то, что значение тепловой нагрузки становится предварительно определенным значением или более, на основе значения крутящего момента или электрического тока и скорости вращения, которые требуются от электромотора.
[0009] В устройстве управления согласно аспекту зацепляющий механизм может представлять собой муфту, которая изменяет перегрузочную способность по передаваемому крутящему моменту. Управление проскальзыванием может представлять собой управление для того, чтобы снижать величину передачи крутящего момента зацепляющего механизма и увеличивать величину передачи крутящего момента гидравлического сцепления. Электронный блок управления может быть выполнен с возможностью определять то, должно или нет рабочее состояние электромотора с большой вероятностью становиться рабочим состоянием, в котором значение тепловой нагрузки в электромоторе составляет предварительно определенное значение или более. Электронный блок управления может быть выполнен с возможностью осуществлять управление проскальзыванием в случае определения того, что рабочее состояние электромотора с большой вероятностью должно становиться рабочим состоянием, в котором значение тепловой нагрузки составляет предварительно определенное значение или более. Электронный блок управления может быть выполнен с возможностью не выполнять управление проскальзыванием таким образом, что величина передачи крутящего момента зацепляющего механизма становится больше величины передачи крутящего момента посредством управления проскальзыванием, и величина передачи крутящего момента гидравлического сцепления становится меньше величины передачи крутящего момента посредством управления проскальзыванием, в случае неопределения того, что рабочее состояние электромотора с большой вероятностью должно становиться рабочим состоянием, в котором значение тепловой нагрузки составляет предварительно определенное значение или более.
[0010] В устройстве управления согласно аспекту в случае если рабочее состояние электромотора представляет собой состояние тепловой нагрузки, которое вызывает состояние однофазной блокировки, выполняется управление проскальзыванием, что приводит к увеличению скорости относительного вращения между элементом на приводящей стороне и элементом на приводимой стороне в гидравлическом сцеплении. Как результат, когда электромотор выводит динамическую мощность, скорость вращения становится высокой, так что состояние однофазной блокировки не допускается. Дополнительно, в этом случае, даже когда скорость относительного вращения в гидравлическом сцеплении увеличивается, гидравлическое сцепление передает динамическую мощность. Следовательно, динамическая мощность передается на ведущее колесо, обеспечивая недопущение или подавление ситуации, в которой теряется мощность приведения в движение, и т.п.
[0011] Дополнительно, когда перегрузочная способность по передаваемому крутящему моменту муфты в качестве зацепляющего механизма снижается посредством управления проскальзыванием, большой крутящий момент прикладывается к муфте. В силу этого проскальзывание формируется в муфте, и кроме того, относительное вращение формируется в гидравлическом сцеплении. Соответственно, можно увеличивать скорость вращения электромотора, без запаздывания. Следовательно, можно надежно не допускать или подавлять достижение рабочим состоянием электромотора вышеописанным состояния однофазной блокировки.
[0012] Кроме того, электронный блок управления определяет то, представляет собой рабочее состояние электромотора состояние тепловой нагрузки, которое с большой вероятностью должно становиться состоянием однофазной блокировки, или состояние тепловой нагрузки, которое с небольшой вероятностью должно становиться состоянием однофазной блокировки, и на основе результата определения, снижает или увеличивает перегрузочную способность по передаваемому крутящему моменту муфты в качестве зацепляющего механизма. Следовательно, в случае если крутящий момент прикладывается в направлении, в котором понижается скорость вращения электромотора, проскальзывание формируется в муфте, так что увеличивается относительное вращение в гидравлическом сцеплении, и в силу этого подавляется снижение скорости вращения электромотора. Следовательно, можно надежно не допускать или подавлять состояние однофазной блокировки. Дополнительно, наоборот, в случае если состояние однофазной блокировки, которое, например, понижает скорость вращения электромотора, практически никогда не возникает, большая величина крутящего момента передается через зацепляющий механизм, обеспечивая уменьшение динамической мощности, которая потребляется посредством относительного вращения в гидравлическом сцеплении, и повышение эффективности использования энергии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
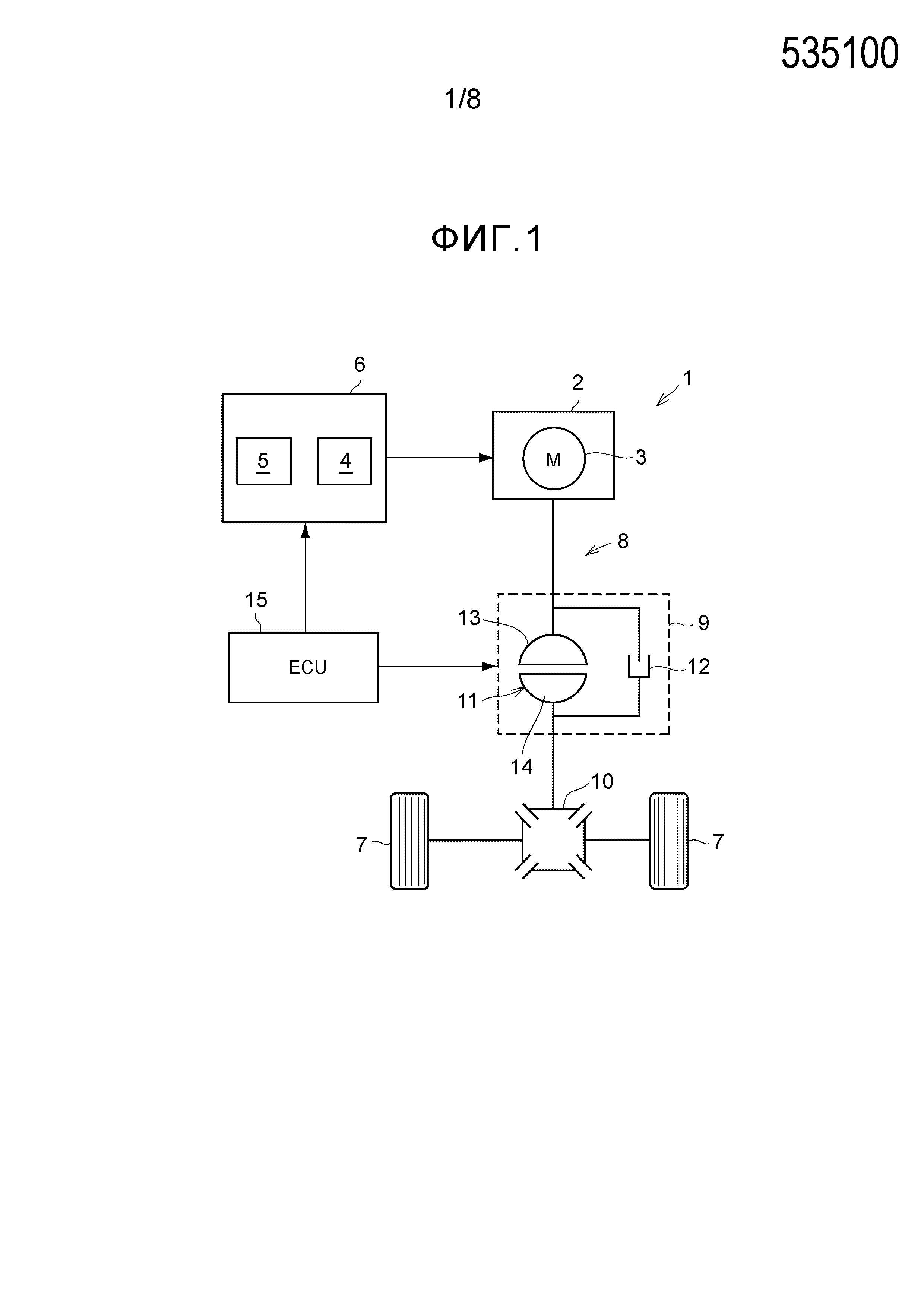
Фиг. 1 является схематичным видом, показывающим примерное транспортное средство с электрическим приводом, которое представляет собой объект управления устройства управления согласно изобретению;
Фиг. 2 является блок-схемой последовательности операций способа для описания примерного управления, которое выполняется посредством устройства управления согласно изобретению;
Фиг. 3 является линейной схемой, схематично показывающей область однофазной блокировки;
Фиг. 4 является принципиальной схемой, показывающей примерное гибридное транспортное средство, которое представляет собой транспортное средство с электрическим приводом в качестве объекта управления устройства управления согласно изобретению;
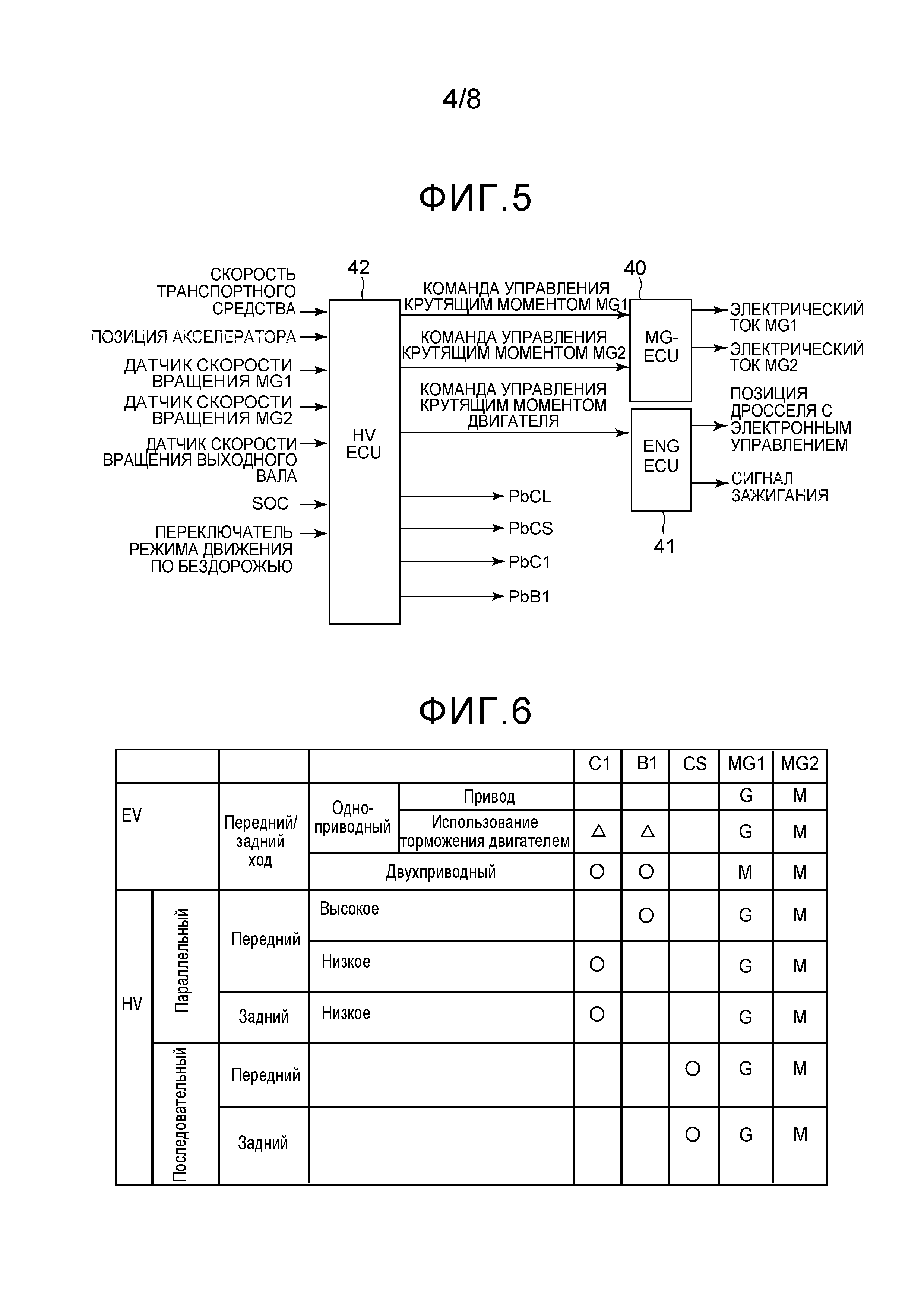
Фиг. 5 является блок-схемой для описания системы управления гибридным транспортным средством;
Фиг. 6 является таблицей, совместно показывающей состояния зацепления/расцепления первой муфты, второй муфты и тормоза в каждом режиме движения гибридного транспортного средства и функцию каждого мотора-генератора;
Фиг. 7 является коллинеарной схемой, показывающей рабочее состояние в гибридном режиме;
Фиг. 8 является коллинеарной схемой, показывающей рабочее состояние в последовательном режиме;
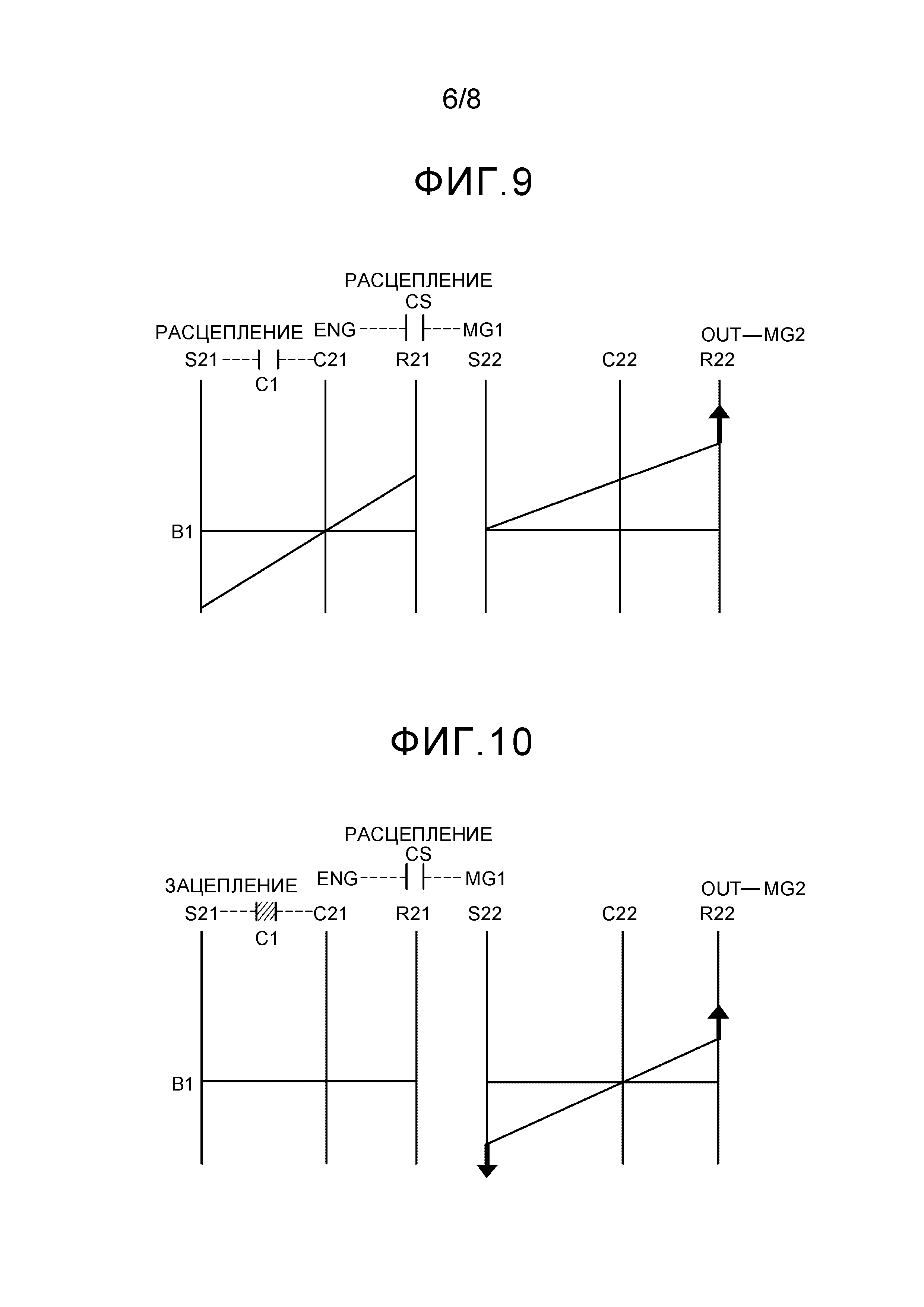
Фиг. 9 является коллинеарной схемой, показывающей рабочее состояние в одноприводном режиме приведения в движение;
Фиг. 10 является коллинеарной схемой, показывающей рабочее состояние в двухприводном режиме приведения в движение;
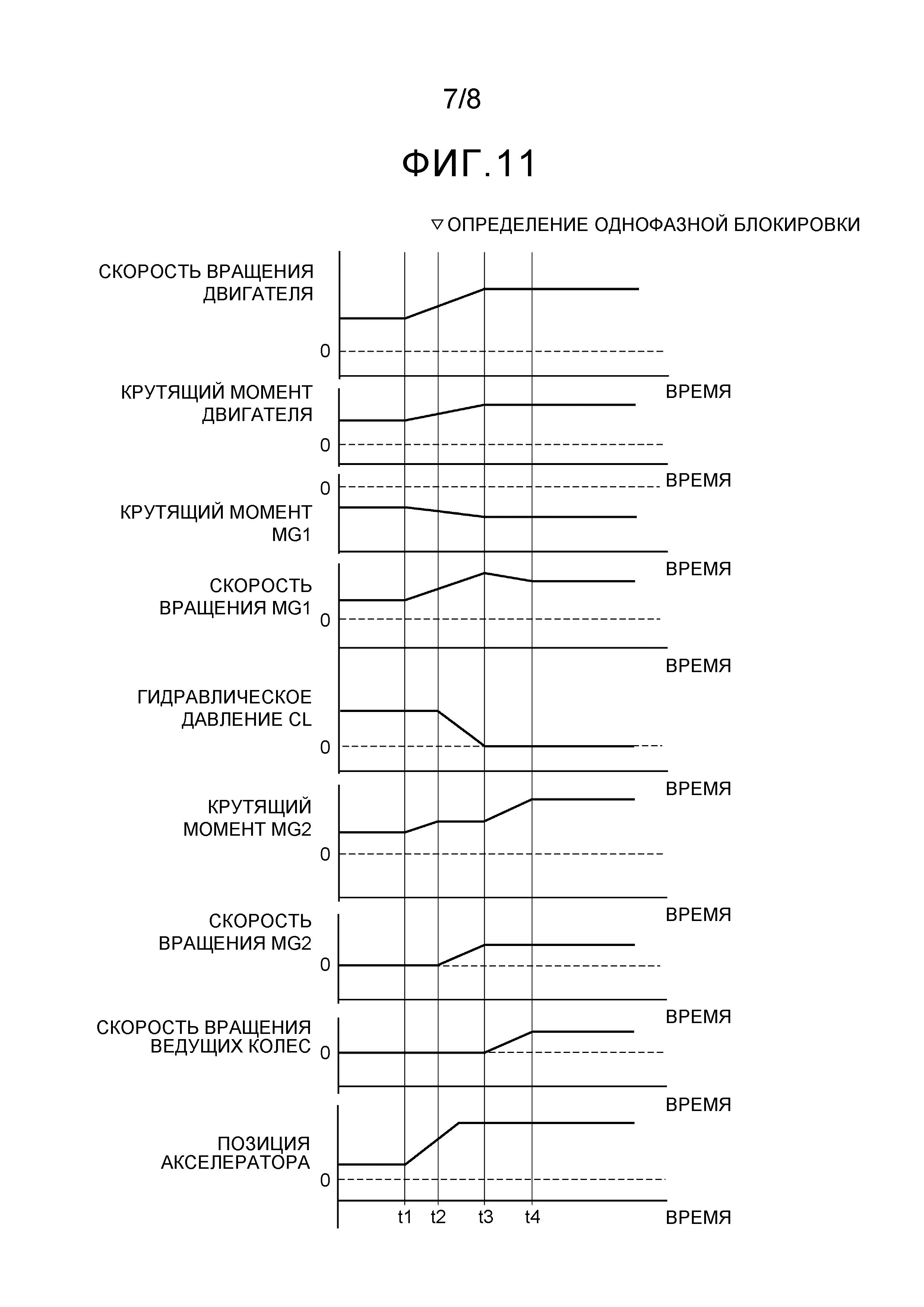
Фиг. 11 является временной диаграммой, показывающей изменения скорости вращения второго мотора-генератора, гидравлического давления блокировочной муфты и т.п. в случае, если устройство управления согласно изобретению осуществляет управление во время начала движения в гибридном режиме; и
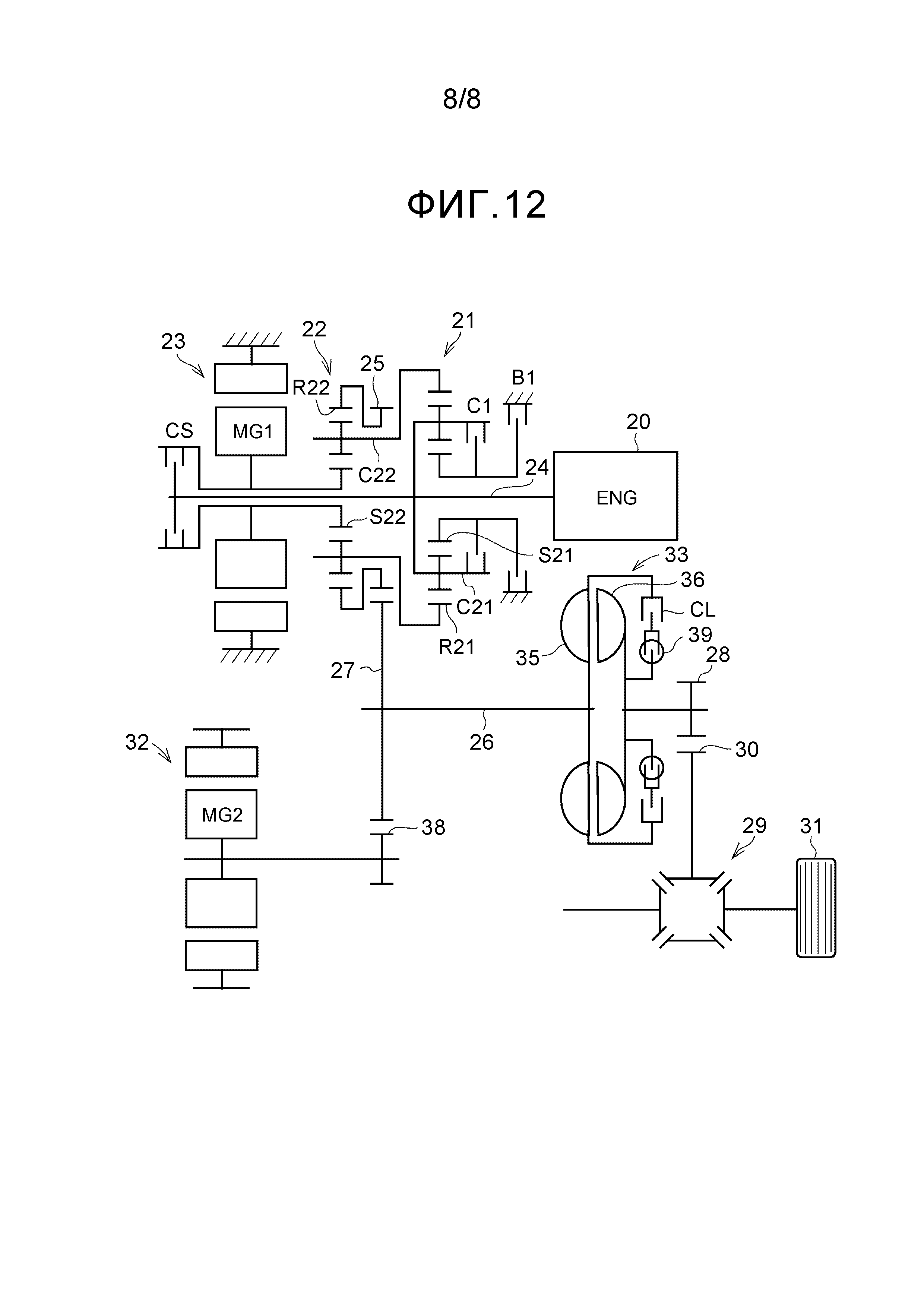
Фиг. 12 является принципиальной схемой, показывающей примерное гибридное транспортное средство, в котором позиции гидравлического сцепления и блокировочной муфты, показанных на фиг. 4, изменяются.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
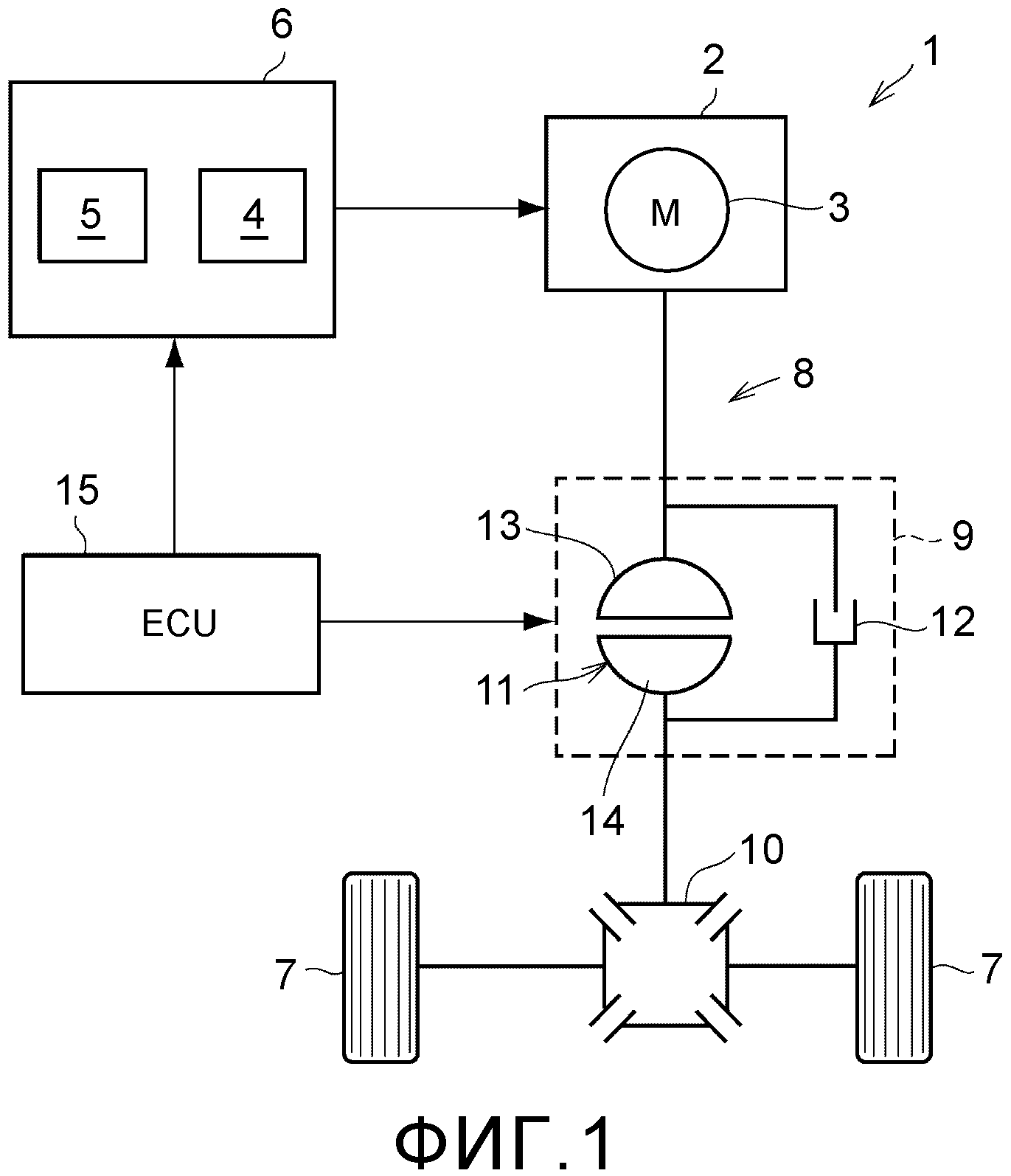
[0014] Фиг. 1 схематично показывает примерное транспортное средство 1 с электрическим приводом, которое управляется посредством устройства управления в изобретении, и источник 2 мощности приведения в движение включает в себя электромотор 3 (M). Электромотор 3 представляет собой трехфазный синхронный электромотор, в качестве примера, и выполнен с возможностью выводить динамическую мощность посредством подачи электрической мощности из блок 6 источника электрической мощности, который включает в себя устройство 4 накопления электричества и инвертор 5. Здесь, источник мощности приведения в движение может включать в себя двигатель внутреннего сгорания (не проиллюстрирован), в дополнение к электромотору 3. Следовательно, транспортное средство 1 с электрическим приводом может представлять собой так называемое гибридное транспортное средство.
[0015] Механизм 9 передачи динамической мощности и дифференциал 10 для того, чтобы передавать крутящий момент при обеспечении дифференциального вращения правого и левого ведущих колес 7, предоставляются на тракте 8 передачи, вдоль которого динамическая мощность, выводимая посредством электромотора 3, передается на ведущие колеса 7. Механизм 9 передачи динамической мощности включает в себя гидравлическое сцепление 11 и зацепляющий механизм 12. Гидравлическое сцепление 11 включает в себя элемент 13 на приводящей стороне, сцепленный с электромотором 3, и элемент 14 на приводимой стороне, расположенный таким образом, что он обращен к элементу 13 на приводящей стороне, и сцепленный с ведущими колесами 7 через дифференциал 10. Элемент 13 на приводящей стороне и элемент 14 на приводимой стороне, вместе с жидкостью, содержатся в корпусе (не проиллюстрирован), который герметизируется непроницаемо для жидкости. Затем жидкость протекает посредством относительного вращения между элементом 13 на приводящей стороне и элементом 14 на приводимой стороне, и жидкостью подается из элемента 13 на приводящей стороне в элемент 14 на приводимой стороне, так что крутящий момент передается между элементом 13 на приводящей стороне и элементом 14 на приводимой стороне. Вкратце, гидравлическое сцепление 11 представляет собой сцепление, которое обеспечивает относительное вращение между элементом 13 на приводящей стороне и элементом 14 на приводимой стороне и которое передает крутящий момент в то время, когда элемент 13 на приводящей стороне и элемент 14 на приводимой стороне относительно вращаются. В качестве гидравлического сцепления также может использоваться преобразователь крутящего момента, имеющий функцию усиления крутящего момента.
[0016] Зацепляющий механизм 12 представляет собой механизм, который сцепляет элемент 13 на приводящей стороне и элемент 14 на приводимой стороне, и выполнен в виде муфты (фрикционной муфты), которая может непрерывно изменять перегрузочную способность по передаваемому крутящему моменту в примере, показанном на фиг. 1. Фрикционная муфта передает крутящий момент посредством силы трения, сформированной посредством контакта между диском и пластиной (которые не проиллюстрированы), и изменяет перегрузочную способность по передаваемому крутящему моменту в зависимости от контактного давления. Контактное давление, в качестве примера, может формироваться и управляться посредством гидравлического давления. Муфта может быть включена в гидравлическое сцепление 11 или может предоставляться параллельно с гидравлическим сцеплением 11, отдельно от гидравлического сцепления 11.
[0017] Предусмотрено электронное устройство 15 управления (ECU), которое управляет электромотором 3 через блок 6 источника электрической мощности и которое управляет механизмом 9 передачи динамической мощности. ECU 15 выполнен в основном в виде микрокомпьютера и выполнен с возможностью осуществлять вычисления с использованием входных данных и заранее сохраненных данных и выводить результаты вычисления, в качестве сигналов команд управления, в блок 6 источника электрической мощности и блок управления гидравлическим давлением (не проиллюстрирован) механизма 9 передачи динамической мощности. Примеры входных данных включают в себя скорость транспортного средства, позицию акселератора (требуемую величину приведения в движение), скорость вращения электромотора 3, состояние заряда (SOC) устройства 4 накопления электричества и сигнал для переключателя режима движения по бездорожью, посредством которого включается помощь при езде по бездорожью для движения по бездорожью. Примеры выходных сигналов команд управления включают в себя сигнал команды управления крутящим моментом (сигнал команды управления электрическим током) для электромотора 3, сигнал команды управления для зацепления/расцепления зацепляющего механизма 12 и сигнал команды управления для перегрузочной способности по передаваемому крутящему моменту.
[0018] Когда электромотор 3 представляет собой трехфазный синхронный электромотор, имеется вероятность того, что электромотор 3 переходит в рабочее состояние, называемое состоянием однофазной блокировки, в случае низкой скорости вращения и высокого крутящего момента. Здесь, однофазная блокировка или состояние однофазной блокировки представляет собой состояние, в котором значение тепловой нагрузки, сформированной в электромоторе в течение предварительно определенного периода, составляет предварительно определенное значение или более, и снижает рабочие характеристики или надежность электрических схем или электронных схем электромотора, инвертора и т.п. В этом подробном описании "однофазная блокировка" или "состояние однофазной блокировки" используется в вышеуказанном смысле. В этом состоянии теплообразование не только электромотора 3, но также и инвертора 5 увеличивается, вызывая снижение их надежности. Дополнительно, электромотор 3 не может выводить крутящий момент, соответствующий электрическому току, что приводит к недостатку мощности приведения в движение для транспортного средства 1 с электрическим приводом. Для надежного недопущения такого состояния однофазной блокировки и обеспечения крутящего момента приведения в движение устройство управления согласно изобретению выполнено с возможностью осуществлять управление, описанное ниже.
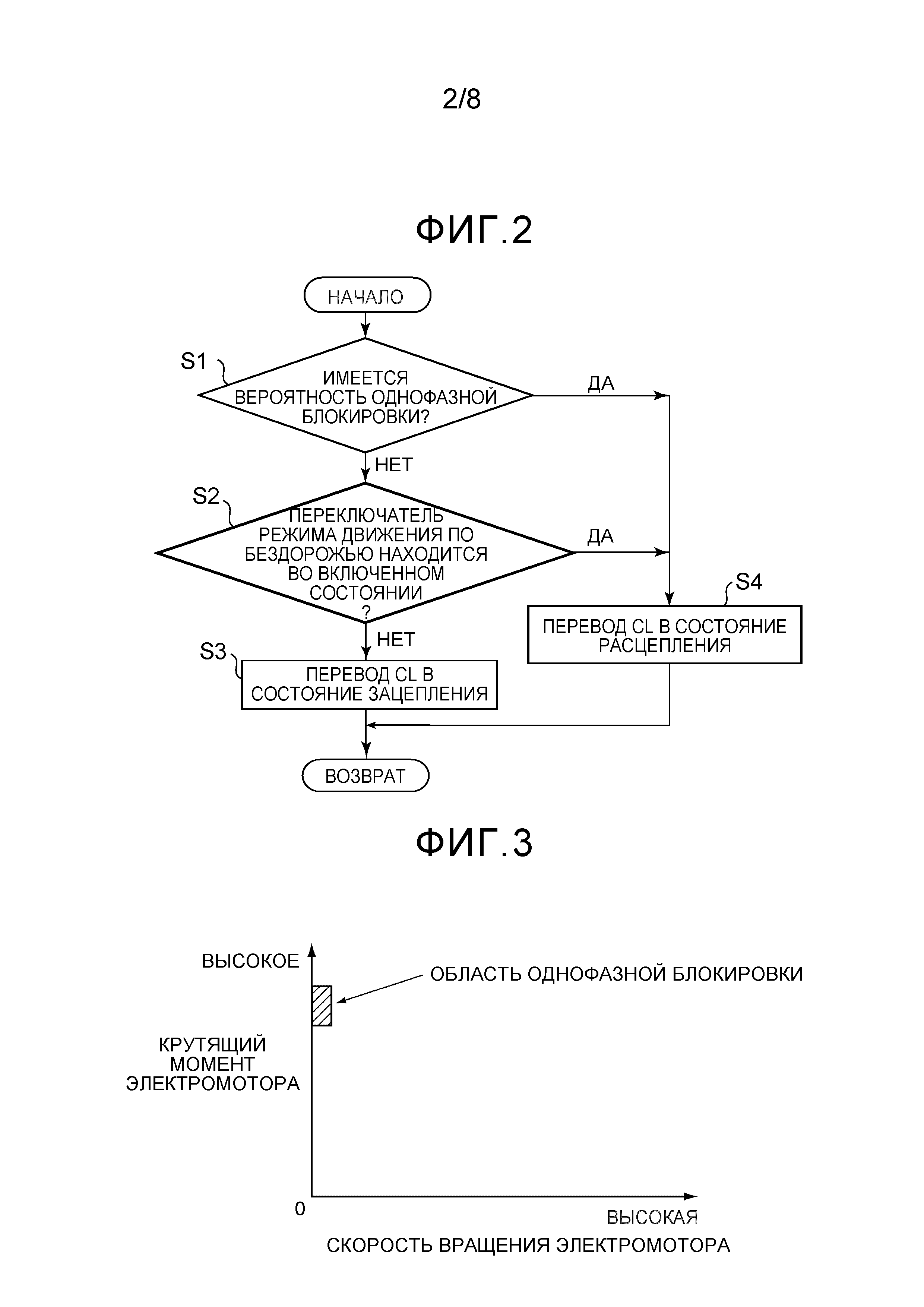
[0019] Фиг. 2 является блок-схемой последовательности операций способа для описания примера управления. Процедура выполняется в случае, если транспортное средство 1 с электрическим приводом движется, либо в случае если блок 6 источника электрической мощности находится во включенном состоянии. После начала процедуры, во-первых, определяется вероятность однофазной блокировки (этап S1). Как описано выше, состояние однофазной блокировки представляет собой состояние, в котором в течение предварительно определенного периода значение тепловой нагрузки в электромоторе составляет предварительно определенное значение или более 3. Следовательно, определение на этапе S1 может выполняться в зависимости от того, составляет либо нет значение обнаруженной тепловой нагрузки в электромоторе 3 или значение тепловой нагрузки, которое оценивается посредством вычисления, к примеру, интегрирования во времени электрического тока, который должен протекать через катушку в предварительно определенной фазе, предварительно определенное значение или более, или может выполняться на основе карты (см. фиг. 3), которая указывает "область однофазной блокировки" с помощью крутящего момента (или значения электрического тока) и скорости вращения электромотора 3. Здесь, "предварительно определенное значение" может быть максимальным значением в диапазоне, в котором электромотор 3 и схемы не повреждены, или в диапазоне, в котором надежность не снижается и, альтернативно, может быть меньшим значением, чем максимальное значение, с учетом запаздывания чувствительности управления, коэффициента надежности и т.п. Между тем, скорость вращения и крутящий момент (или значение электрического тока) электромотора 3 могут обнаруживаться посредством предварительно определенных датчиков или могут оцениваться на основе изменения скорости транспортного средства, позиции акселератора (требуемой величины приведения в движение) и т.п. Следовательно, на основе заранее подготовленных данных, показанных на фиг. 3, и данных, полученных посредством датчиков, можно определять вероятность возникновения однофазной блокировки, т.е. то, приводит продолжение рабочего состояния в этот момент времени к состоянию однофазной блокировки или не приводит к состоянию однофазной блокировки. В качестве примера пороговые значения могут быть заранее установлены для скорости вращения и крутящего момента электромотора 3 соответственно, и когда обнаруженная скорость вращения составляет пороговое значение или ниже, а крутящий момент составляет пороговое значение или выше, может быть определен переход в состояние однофазной блокировки.
[0020] В случае если требуемый крутящий момент для электромотора 3 является низким вследствие низкой позиции акселератора и т.п., либо в случае если скорость вращения электромотора 3 является высокой, отсутствует вероятность того, что рабочее состояние электромотора 3 становится состоянием однофазной блокировки, и следовательно, отрицательное определение выполняется на этапе S1. В этом случае определяется то, находится или нет переключатель режима движения по бездорожью во включенном состоянии (этап S2). Этап определения является этапом для определения того, движется или нет транспортное средство 1 с электрическим приводом в то время, когда электромотор 3 работает с низкой скоростью вращения и при высоком крутящем моменте. Следовательно, определение может выполняться не на основе сигнала, выводимого посредством переключателя режима движения по бездорожью, а на основе информации дороги, полученной посредством навигационной системы, предыстории скорости транспортного средства и позиции акселератора или ускорения транспортного средства и т.п. Соответственно, определение на этапе S2 может выполняться в качестве одного режима вышеописанного определения на этапе S1. Здесь, обычно, переключатель режима движения по бездорожью "включается" в случае движения на низкой скорости транспортного средства и при высоком крутящем моменте, к примеру, при движении на дороге с подъемом с высоким градиентом. Следовательно, когда переключатель режима движения по бездорожью "включен", определяется то, что рабочее состояние электромотора 3 с большой вероятностью должно становиться состоянием однофазной блокировки. Затем на этапе S2 считается, что состояние однофазной блокировки возникает как 100%, и выполняется положительное определение.
[0021] В случае если отрицательное определение выполнено на этапе S2, электромотор 3 не переходит в состояние однофазной блокировки, либо вероятность является низкой. Следовательно, в этом случае зацепляющий механизм 12 (CL) зацеплен (этап S3), и процесс возвращается. Управление зацеплением представляет собой управление для того, чтобы увеличивать перегрузочную способность по передаваемому крутящему моменту зацепляющего механизма 12. Следовательно, в случае если зацепляющий механизм 12 проскальзывает, и формируется относительное вращение между элементом 13 на приводящей стороне и элементом 14 на приводимой стороне, управление зацеплением представляет собой управление для того, чтобы снижать скорость относительного вращения (скорость дифференциального вращения) или уменьшать скорость относительного вращения до нуля, и в случае если зацепляющий механизм 12 передает крутящий момент вместе с гидравлическим сцеплением 11, управление зацеплением представляет собой управление для того, чтобы снижать коэффициент передачи крутящего момента гидравлического сцепления 11 и увеличивать коэффициент передачи крутящего момента зацепляющего механизма 12. Когда зацепляющий механизм 12 управляется в так называемое состояние полного зацепления без проскальзывания, потери динамической мощности вследствие проскальзывания уменьшаются, и следовательно, можно повышать эффективность использования энергии.
[0022] С другой стороны, в случае если положительное определение выполнено на этапе S1, либо в случае если положительное определение выполнено на этапе S2, зацепляющий механизм 12 (CL) управляется в сторону расцепления (этап S4), и процесс возвращается. Управление расцеплением представляет собой управление для того, чтобы снижать перегрузочную способность по передаваемому крутящему моменту зацепляющего механизма 12, и соответствует управлению проскальзыванием в варианте осуществления изобретения. Следовательно, в случае если элемент 13 на приводящей стороне и элемент 14 на приводимой стороне в гидравлическом сцеплении 11 вращаются объединенным образом, и относительное вращение не формируется, управление расцеплением представляет собой управление для того, чтобы формировать относительное вращение. В случае если формируется относительное вращение, управление расцеплением представляет собой управление для того, чтобы увеличивать скорость относительного вращения (скорость дифференциального вращения). Дополнительно, в случае если зацепляющий механизм 12 передает крутящий момент вместе с гидравлическим сцеплением 11, управление расцеплением представляет собой управление для того, чтобы увеличивать коэффициент передачи крутящего момента гидравлического сцепления 11 и снижать коэффициент передачи крутящего момента зацепляющего механизма 12.
[0023] Следовательно, в случае если увеличивается требуемая величина приведения в движение, и увеличивается выходная мощность электромотора 3, гидравлическое сцепление 11 переходит в так называемое состояние проскальзывания, либо увеличивается величина проскальзывания, и увеличивается скорость относительного вращения (скорость дифференциального вращения), в ответ на увеличение выходного крутящего момента электромотора 3. Иными словами, без запаздывания относительно увеличения выходного крутящего момента электромотора 3, возникает состояние проскальзывания, или увеличивается величина проскальзывания, так что увеличивается скорость вращения электромотора 3. Другими словами, можно задавать скорость вращения электромотора 3 равной скорости вращения за пределами области однофазной блокировки без специального выполнения регулирования скорости вращения и управления крутящим моментом для электромотора 3. Таким образом, посредством увеличения скорости вращения электромотора 3, не допускается или подавляется попадание рабочего состояния электромотора 3 в область однофазной блокировки. Дополнительно, в гидравлическом сцеплении 11, элемент 13 на приводящей стороне и элемент 14 на приводимой стороне относительно вращаются, и за счет этого крутящий момент передается через жидкость. Следовательно, поскольку крутящий момент передается посредством гидравлического сцепления 11, крутящий момент передается из электромотора 3 на ведущие колеса 7, и мощность приведения в движение транспортного средства 1 с электрическим приводом может обеспечиваться, даже когда перегрузочная способность по передаваемому крутящему моменту зацепляющего механизма 12 снижается. Кроме того, посредством относительного вращения между элементом 13 на приводящей стороне и элементом 14 на приводимой стороне, жидкость перемешивается и рассекается, и в силу этого неизбежно вырабатывается тепло. Тем не менее, жидкость протекает с циркуляцией, в гидравлическом сцеплении 11. Следовательно, стимулируется тепловое излучение от жидкости наружу, обеспечивая подавление роста температуры.
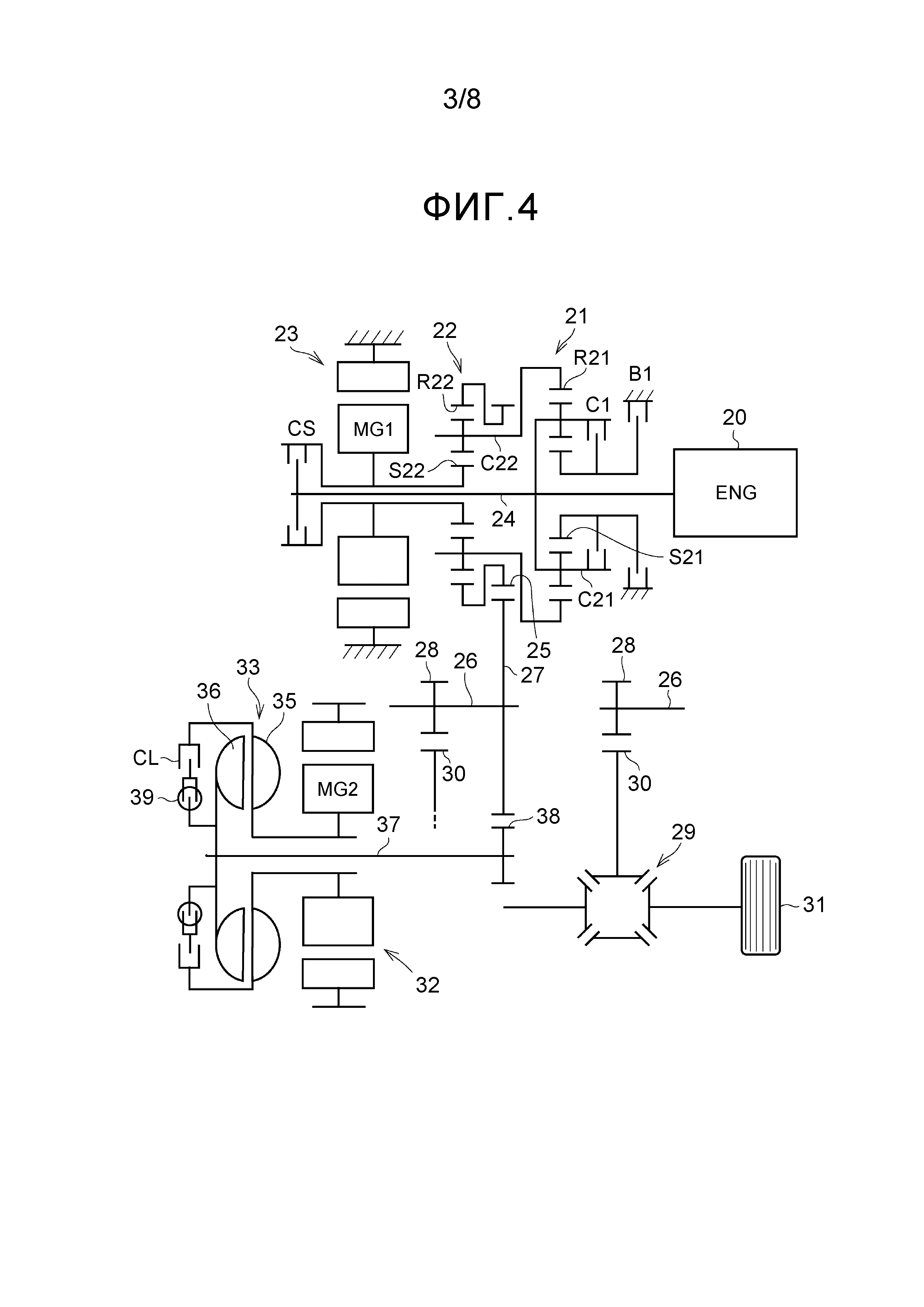
[0024] Далее описывается пример, в котором транспортное средство 1 с электрическим приводом представляет собой гибридное транспортное средство, и изобретение применяется к устройству управления для гибридного транспортного средства. Фиг. 4 показывает примерную зубчатую передачу гибридного транспортного средства. На идентичной осевой линии с двигателем 20 (ENG), механизм 21 повышающей передачи, механизм 22 разделения динамической мощности и первый мотор-генератор 23 (MG1) располагаются в порядке со стороны двигателя 20. Двигатель 20 представляет собой двигатель внутреннего сгорания, к примеру, бензиновый двигатель и дизельный двигатель. Механизм 21 повышающей передачи представляет собой механизм для увеличения скорости вращения выходного вала таким образом, что скорость вращения выходного вала выше скорости вращения двигателя, и в примере, показанном на фиг. 4, выполнен в виде планетарной зубчатой передачи односателлитного типа. Следовательно, механизм 21 повышающей передачи включает в себя солнечную шестерню S21, коронную шестерню R21, расположенную на концентрической окружности для солнечной шестерни S21, и водило C21, удерживающее, с возможностью вращения и поворота, сателлит-шестерню, зацепленную с солнечной шестерней S21 и коронной шестерней R21. Водило C21 сцепляется с входным валом 24, в который динамическая мощность передается из двигателя 20. Дополнительно, предусмотрены первая муфта C1 для того, чтобы избирательно сцеплять солнечную шестерню S21 и водило C21, и тормоз B1 для того, чтобы избирательно стопорить солнечную шестерню S21. Следовательно, посредством зацепления муфты C1, механизм 21 повышающей передачи переключается на так называемую ступень прямого соединения, на которой весь механизм 21 повышающей передачи вращается объединенным образом, и передаточное отношение механизма 21 повышающей передачи становится равным 1. Напротив, когда вращение солнечной шестерни S21 прекращается посредством зацепления тормоза B1, скорость вращения коронной шестерни R21 становится выше скорости вращения водила C21, и механизм 21 повышающей передачи переключается на так называемую ступень повышающей передачи, на которой передаточное отношение ниже 1. Дополнительно, когда как первая муфта C1, так и тормоз B1 зацепляются, весь механизм 21 повышающей передачи стопорится, и вращение двигателя 20 также прекращается. Кроме того, когда как первая муфта C1, так и тормоз B1 расцепляются, солнечная шестерня S21 переходит в состояние свободного вращения, и следовательно, механизм 21 повышающей передачи не выполняет передачу крутящего момента.
[0025] Коронная шестерня R21 представляет собой элемент выходного вала и передает динамическую мощность в механизм 22 разделения динамической мощности. В примере, показанном на фиг. 4, механизм 22 разделения динамической мощности выполнен в виде планетарной зубчатой передачи односателлитного типа. Следовательно, механизм 22 разделения динамической мощности включает в себя солнечную шестерню S22, коронную шестерню R22, расположенную на концентрической окружности для солнечной шестерни S22, и водило C22 удерживающее, с возможностью вращения и поворота, сателлит-шестерню, зацепленную с солнечной шестерней S22 и коронной шестерней R22. Водило C22 сцепляется с коронной шестерней R21 механизма 21 повышающей передачи. Элемент выходного вала механизма 22 разделения динамической мощности представляет собой коронную шестерню R22, и коронная шестерня R22 сцепляется с выходной шестерней 25. Солнечная шестерня S22 сцепляется с первым мотором-генератором 23, и солнечная шестерня S22 представляет собой реактивный элемент.
[0026] Солнечная шестерня S22 объединяется с валом солнечной шестерни, и входной вал 24 проходит с возможностью вращения через внутреннюю часть вала солнечной шестерни. Затем предусмотрена вторая муфта CS для того, чтобы избирательно сцеплять входной вал 24 и солнечную шестерню S22. Вторая муфта CS представляет собой муфту для задания последовательного режима, как описано ниже.
[0027] Обратный вал 26 располагается параллельно входному валу 24, и на обратном валу 26 ведомая шестерня 27, имеющая большой диаметр, и ведущая шестерня 28, имеющая небольшой диаметр, предоставляются таким образом, что они вращаются объединенно. Ведомая шестерня 27 зацепляется с вышеописанной выходной шестерней 25. Дополнительно, ведущая шестерня 28 зацепляется с коронной шестерней 30 дифференциала 29, который представляет собой шестерню главной передачи. Мощность приведения в движение передается из дифференциала 29 на правое и левое ведущие колеса 31. Следовательно, последовательность шестерен из ведомой шестерни 27 и ведущей шестерни 28 составляет редукторный механизм. Здесь, на фиг. 4, для удобства иллюстрации, ведущая шестерня 28 и дифференциал 29 перемещены и описаны справа на фиг. 4.
[0028] Второй мотор-генератор 32, который соответствует электромотору в варианте осуществления изобретения, располагается параллельно входному валу 24 и обратному валу 26. Кроме того, на идентичной осевой линии со вторым мотором-генератором 32, гидравлическое сцепление 33 и блокировочная муфта CL, которая соответствует зацепляющему механизму в варианте осуществления изобретения, располагаются параллельно. Гидравлическое сцепление 33 выполнено с возможностью располагать рабочее колесо 35 насоса, которое представляет собой элемент на приводящей стороне, и рабочее колесо 36 турбины, которое представляет собой элемент на приводимой стороне, таким образом, что они обращены друг к другу, и передавать крутящий момент между рабочим колесом 35 насоса и рабочим колесом 36 турбины посредством подачи, в рабочее колесо 36 турбины, спирального потока жидкости, сформированного посредством рабочего колеса 35 насоса. Затем рабочее колесо 35 насоса сцепляется со вторым мотором-генератором 32. Дополнительно, вал 37 турбины, объединенный с рабочим колесом 36 турбины, проходит через центральную часть второго мотора-генератора 32 и идет в сторону ведомой шестерни 27. Затем другая ведущая шестерня 38, зацепленная с ведомой шестерней 27, присоединяется к валу 37 турбины.
[0029] Блокировочная муфта CL представляет собой муфту, которая передает крутящий момент посредством механического сцепления рабочего колеса 35 насоса или элемента, объединенного с рабочим колесом 35 насоса, и рабочего колеса 36 турбины или элемента, объединенного с рабочим колесом 36 турбины, и выполнена в виде муфты, такой как фрикционная муфта, которая управляется посредством гидравлического давления, электромагнитной силы и т.п. таким образом, что перегрузочная способность по передаваемому крутящему моменту непрерывно изменяется. Здесь, амортизатор 39 предоставляется последовательно с блокировочной муфтой CL. Дополнительно, гидравлическое сцепление 33 и блокировочная муфта CL могут представлять собой традиционно известный преобразователь крутящего момента с блокировочной муфтой. Дополнительно, гидравлическое сцепление 33 и блокировочная муфта CL соответствуют механизму передачи динамической мощности в варианте осуществления изобретения.
[0030] Посредством вышеописанного механизма 22 разделения динамической мощности динамическая мощность, выводимая посредством двигателя 20, разделяется на сторону первого мотора-генератора 23 и сторону выходной шестерни 25. В этом случае первый мотор-генератор 23 выступает в качестве электрогенератора и за счет этого предоставляет реактивный крутящий момент для солнечной шестерни S22. Электрическая мощность, вырабатываемая посредством первого мотора-генератора 23, подается во второй мотор-генератор 32. Второй мотор-генератор 32 выступает в качестве мотора, и выходной крутящий момент суммируется с крутящим моментом, выводимым из выходной шестерни 25, в ведомой шестерне 27. Следовательно, моторы-генераторы 23, 32 электрически подключены через инвертор и устройство накопления электричества, которые не проиллюстрированы. Здесь, моторы-генераторы 23, 32, в качестве примера, выполнены в виде трехфазных синхронных электромоторов.
[0031] Фиг. 5 является блок-схемой, показывающей систему управления для гибридного транспортного средства. Предусмотрены электронное устройство 40 управления мотором-генератором (MG-ECU) для того, чтобы управлять моторами-генераторами 23, 32, и электронное устройство 41 управления двигателем (ENG-ECU) для того, чтобы управлять двигателем 20. Электронные устройства 40, 41 управления выполнены в основном в виде микрокомпьютеров и выполнены с возможностью осуществлять вычисления на основе множества входных сигналов или множества входных данных и выводить результаты вычисления в качестве сигналов команд управления. MG-ECU 40, в основном выполнен с возможностью управлять соответствующими электрическими токами (электрическим током MG1, электрическим током MG2) в первом моторе-генераторе 23 и втором моторе-генераторе 32. Дополнительно, ENG-ECU 41, в основном выполнен с возможностью выводить, в двигатель 20, позиционный сигнал дросселя с электронным управлением для командования позиции электронного дроссельного клапана (не проиллюстрирован) двигателя 20 и сигнал зажигания для командования зажигания и распределения зажигания.
[0032] Предусмотрено гибридное электронное устройство 42 управления (HV-ECU), которое выводит сигналы команд управления в электронные устройства 40, 41 управления и, кроме того, осуществляет управление зацеплением/расцеплением вышеописанных муфт C1, CS, CL и тормоза B1 и управление перегрузочной способностью по передаваемому крутящему моменту. Аналогично вышеописанным электронным устройствам 40, 41 управления HV-ECU 42 выполнен в основном в виде микрокомпьютера и выполнен с возможностью осуществлять вычисления на основе множества входных сигналов или множества входных данных и выводить результаты вычисления в качестве сигналов команд управления. Примеры данных, которые должны быть введены, включают в себя скорость транспортного средства, позицию акселератора, обнаруживаемые данные посредством датчика скорости вращения для первого мотора-генератора (MG1), обнаруживаемые данные посредством датчика скорости вращения для второго мотора-генератора (MG2), обнаруживаемые данные посредством датчика скорости вращения для выходного вала (например, обратного вала), состояние заряда (SOC) и сигнал из переключателя режима движения по бездорожью. Дополнительно, в качестве сигналов команд управления, которые должны выводиться, например, команда управления крутящим моментом для первого мотора-генератора (MG1) и команда управления крутящим моментом для второго мотора-генератора (MG2) выводятся в MG-ECU 40, и команда управления крутящим моментом двигателя выводится в ENG-ECU 41. Кроме того, управляющие гидравлические давления PbC1, PbCS, PbCL, PbB1 для муфт C1, CS, CL и тормоза B1 выводятся из HV-ECU 42.
[0033] Различные режимы движения задаются посредством обеспечения функционирования моторов-генераторов 23, 32 в качестве моторов или электрогенераторов и управления муфтами C1, CS и тормозом B1 в состояния зацепления или расцепления. Фиг. 6 совместно показывает режимы движения. Относительно муфт C1, CS и тормоза B1, знак круга показывает состояние зацепления, а знак треугольника показывает, что одно из означенного находится в состоянии зацепления. Дополнительно, относительно моторов-генераторов MG1, MG2, "G" показывает то, что мотор-генератор функционирует в основном в качестве электрогенератора, а "M" показывает то, что мотор-генератор функционирует в основном в качестве мотора во время приведения в движение и выступает в качестве электрогенератора во время рекуперации. Гибридный режим (HV) представляет собой режим движения при формировании мощности приведения в движение с помощью двигателя 20 и моторов-генераторов 23, 32, и могут выбираться параллельный режим и последовательный режим. В качестве движения вперед в параллельном режиме возможно движение, в котором вышеописанный механизм 21 повышающей передачи переводится на ступень повышающей передачи (высокую), и движение, в котором механизм 21 повышающей передачи переводится на ступень прямого соединения (низкую). Ступень повышающей передачи задается посредством зацепления только тормоза B1. В этом случае первый мотор-генератор 23 выступает в качестве электрогенератора (G), и скорость вращения двигателя 20 управляется как скорость вращения, обеспечивающая хорошую эффективность использования топлива. Электрическая мощность, вырабатываемая посредством первого мотора-генератора 23, подается во второй мотор-генератор 32, и второй мотор-генератор 32 выступает в качестве мотора (M). Напротив, ступень прямого соединения задается посредством зацепления только первой муфты C1. В этом случае функции моторов-генераторов 23, 32 являются идентичными функциям в случае движения на ступени повышающей передачи.
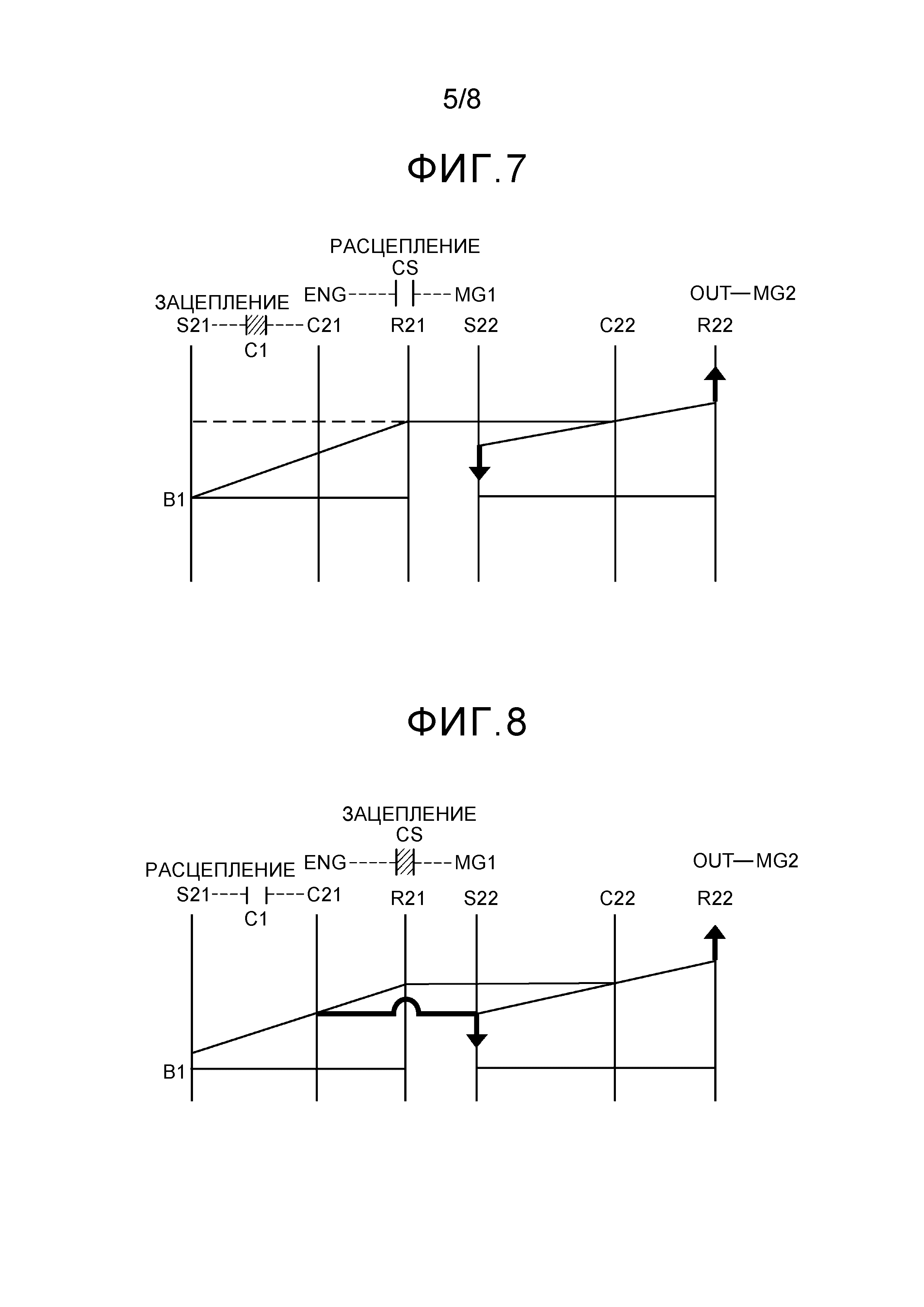
[0034] Фиг. 7 является коллинеарной схемой для планетарной зубчатой передачи, образующей механизм 21 повышающей передачи, и планетарной зубчатой передачи, образующей механизм 22 разделения динамической мощности, когда транспортное средство движется в гибридном режиме. Левая сторона по фиг. 7 является коллинеарной схемой для механизма 21 повышающей передачи, а правая сторона является коллинеарной схемой для механизма 22 разделения динамической мощности. Во время движения вперед солнечная шестерня S21 стопорится посредством тормоза B1 и водило C21 вращается посредством двигателя 20. Следовательно, коронная шестерня R21 вращается с скоростью, которая выше скорости вращения двигателя. Иными словами, механизм 21 повышающей передачи становится ступенью повышающей передачи, на которой передаточное отношение ниже 1. В механизме 22 разделения динамической мощности водило C22 вращается вместе с коронной шестерней R21 механизма 21 повышающей передачи, и крутящий момент является крутящим моментом в положительном направлении (направлении вращения двигателя 20). В этом состоянии первый мотор-генератор 23 выступает в качестве электрогенератора, крутящий момент в отрицательном направлении (направлении прекращения вращения) действует на солнечную шестерню S22, и крутящий момент в положительном направлении, ассоциированный с ним, действует на коронную шестерню R22. Иными словами, динамическая мощность двигателя 20 разделяется на сторону солнечной шестерни S22 и сторону коронной шестерни R22. Затем электрическая мощность, вырабатываемая посредством первого мотора-генератора 23, подается во второй мотор-генератор 32, и второй мотор-генератор 32 выступает в качестве мотора. Следовательно, крутящий момент суммируется с крутящим моментом, который должен выводиться из коронной шестерни R22, и выводится на ведущие колеса 31. Пунктирная линия на фиг. 7 показывает рабочее состояние, когда ступень прямого соединения устанавливается в механизме 21 повышающей передачи. Здесь, при заднем ходе посредством динамической мощности, выводимой посредством двигателя 20, первый мотор-генератор 23 вращается, чтобы формировать электричество, и за счет электрической мощности второй мотор-генератор 32 выступает в качестве мотора в направлении отрицательного вращения.
[0035] Последовательный режим представляет собой режим движения при приведении в действие первого мотора-генератора 23 в качестве электрогенератора посредством двигателя 20 и приведении в действие второго мотора-генератора 32 в качестве мотора за счет электрической мощности. Следовательно, посредством зацепления только второй муфты CS, динамическая мощность двигателя 20 передается в первый мотор-генератор 23, и первый мотор-генератор 23 выступает в качестве электрогенератора (G). Дополнительно, посредством подачи электрической мощности, вырабатываемой посредством первого мотора-генератора 23, второй мотор-генератор 32 выступает в качестве мотора (M) и вращается положительно для переднего хода или вращается отрицательно для заднего хода.
[0036] Фиг. 8 является коллинеарной схемой для планетарной зубчатой передачи, образующей механизм 21 повышающей передачи, и планетарной зубчатой передачи, образующей механизм 22 разделения динамической мощности, когда транспортное средство движется в последовательном режиме. Левая сторона по фиг. 8 является коллинеарной схемой для механизма 21 повышающей передачи, и правая сторона является коллинеарной схемой для механизма 22 разделения динамической мощности. Во время движения вперед динамическая мощность двигателя 20 передается в первый мотор-генератор 23 через вторую муфту CS, и первый мотор-генератор 23 вращается в положительном направлении, чтобы формировать электричество. Дополнительно, солнечная шестерня S22 механизма 22 разделения динамической мощности вращается положительно, но солнечная шестерня S21 вращается вхолостую в механизме 21 повышающей передачи, в котором коронная шестерня R21 сцепляется с водилом C22. Следовательно, сила реакции не формируется в водиле C22 механизма 22 разделения динамической мощности, и как результат, динамическая мощность двигателя 20 не передается в коронную шестерню R22. Между тем, за счет электрической мощности, вырабатываемой посредством первого мотора-генератора 23, второй мотор-генератор 32 вращается в положительном направлении с тем, чтобы выводить крутящий момент, и следовательно, транспортное средство движется передним ходом. В этом случае коронная шестерня R22 механизма 22 разделения динамической мощности вращается в положительном направлении. Здесь, во время движения назад, второй мотор-генератор 32 вращается в отрицательном направлении.
[0037] Далее описывается EV-режим. EV-режим представляет собой режим движения за счет электрической мощности устройства накопления электричества без использования динамической мощности двигателя 20, и следовательно, транспортное средство движется как электротранспортное средство (EV: электромобиль). Второй мотор-генератор 32 сцепляется с валом 37 турбины через гидравлическое сцепление 33 или блокировочную муфту CL. Следовательно, в EV-режиме, в качестве источника мощности приведения в движение, в основном работает второй мотор-генератор 32, и когда мощность приведения в движение или тормозная мощность является недостаточной, первый мотор-генератор 23 используется параллельно. Иными словами, возможны одноприводный режим приведения в движение с использованием только второго мотора-генератора 32 и двухприводный режим приведения в движение с использованием обоих моторов-генераторов 23, 32. В одноприводном режиме приведения в движение, поскольку только второй мотор-генератор 32 работает в качестве источника мощности приведения в движение, муфты C1, CS и тормоз B1 расцепляются, и первый мотор-генератор 23, который не управляется специально, не выполняет ни подачу питания, ни рекуперацию. Затем второй мотор-генератор 32 выступает в качестве мотора (M) во время приведения в движение и выступает в качестве электрогенератора (G) во время торможения. Когда тормозная мощность, ассоциированная с рекуперацией, является недостаточной, зацепляется, по меньшей мере, одно из первой муфты C1 и тормоза B1. Дополнительно, моторы-генераторы 23, 32 выступают в качестве электрогенераторов (G), и отрицательный крутящий момент, ассоциированный с выработкой электричества, выступает в качестве тормозной мощности.
[0038] Фиг. 9 является коллинеарной схемой для планетарной зубчатой передачи, образующей механизм 21 повышающей передачи, и планетарной зубчатой передачи, образующей механизм 22 разделения динамической мощности, когда транспортное средство движется в одноприводном режиме приведения в движение. Левая сторона по фиг. 9 является коллинеарной схемой для механизма 21 повышающей передачи, и правая сторона является коллинеарной схемой для механизма 22 разделения динамической мощности. Во время движения вперед только второй мотор-генератор 32 выводит мощность приведения в движение, и следовательно, коронная шестерня R22 механизма 22 разделения динамической мощности вращается положительно. Синхронный крутящий момент трогания с места первого мотора-генератора 23 действует на солнечную шестерню S22. Солнечная шестерня S21 механизма 21 повышающей передачи вращается вхолостую, и следовательно, крутящий момент (отрицательный крутящий момент) в направлении прекращения вращения практически не прикладывается к водилу C22, сцепленному с коронной шестерней R21 механизма 21 повышающей передачи. Следовательно, коронная шестерня R22 вращается с скоростью, соответствующей скорости транспортного средства, солнечная шестерня S22 вращается с низкой скоростью вращения, при которой солнечная шестерня S22 находится практически в застопоренном состоянии, и дополнительно, водило C22 вращается с более низкой скоростью вращения, чем коронная шестерня R22. Между тем, в механизме 21 повышающей передачи, водило C21, сцепленное с двигателем 20, находится в застопоренном состоянии, и коронная шестерня R21 вращается с скоростью вращения, идентичной скорости вращения водила C22 механизма 22 разделения динамической мощности. В силу этого солнечная шестерня S21 вращается в отрицательном направлении. Вращение каждого вращательного элемента механизма 21 повышающей передачи и механизма 22 разделения динамической мощности представляет собой так называемое ассоциированное вращение вследствие вращения ведомой шестерни 27 на обратном валу 26 посредством второго мотора-генератора 32. Здесь, транспортное средство движется задним ходом, когда второй мотор-генератор 32 вращается в отрицательном направлении и выводит мощность приведения в движение.
[0039] Двухприводный режим приведения в движение представляет собой режим движения с зацеплением первой муфты C1 и тормоза B1 и обеспечением работы обоих моторов-генераторов 23, 32 в качестве моторов (M). Фиг. 10 является коллинеарной схемой, показывающей состояние. В механизме 21 повышающей передачи, первая муфта C1 зацепляется, и весь механизм 21 повышающей передачи объединяется. В этом состоянии, тормоз B1 зацепляется, и в силу этого вращение всего механизма 21 повышающей передачи прекращается. Следовательно, водило C22 механизма 22 разделения динамической мощности, сцепленного с коронной шестерней R21, стопорится, и в этом состоянии первый мотор-генератор 23 работает в качестве мотора в направлении отрицательного вращения. Соответственно, крутящий момент посредством первого мотора-генератора 23 выводится из коронной шестерни R22 в качестве крутящего момента в направлении положительного вращения. Дополнительно, второй мотор-генератор 32 работает в качестве мотора в направлении положительного вращения. Соответственно, крутящий момент второго мотора-генератора 32 суммируется с крутящим моментом, который должен выводиться из выходной шестерни 25. Во время движения назад направления крутящего момента моторов-генераторов 23, 32 являются противоположными направлениям крутящего момента во время движения вперед.
[0040] В гибридном транспортном средстве, показанном на фиг. 4, источник мощности приведения в движение представляет собой двигатель 20 и моторы-генераторы 23, 32, и второй мотор-генератор 32 выступает в качестве мотора и выводит крутящий момент в любом из вышеописанных режимов движения. Следовательно, имеется вероятность переключения в состояние однофазной блокировки, например, во время начала движения или во время ускорения из состояния низкой скорости транспортного средства. Определение или оценка (прогнозирование) состояния однофазной блокировки может выполняться аналогично определению или оценке (прогнозированию) в вышеописанном варианте осуществления. Кроме того, в гибридном транспортном средстве, в случае если определяется или оценивается переход в состояние однофазной блокировки, увеличивается величина проскальзывания блокировочной муфты CL, и увеличивается скорость относительного вращения в гидравлическом сцеплении 33. В силу этого скорость вращения второго мотора-генератора 32 переходит за пределы вышеописанной области однофазной блокировки или не попадает в область однофазной блокировки. Ниже описывается управление в примере начала движения.
[0041] Фиг. 11 является временной диаграммой, показывающей изменения скорости вращения второго мотора-генератора 32 (MG2), гидравлического давления блокировочной муфты CL и т.п., когда устройство управления согласно изобретению осуществляет управление. Также при управлении в этом случае, когда определяется или оценивается то, что состояние однофазной блокировки возникает с большой вероятностью, снижается перегрузочная способность по передаваемому крутящему моменту блокировочной муфты CL, и увеличивается скорость вращения второго мотора-генератора 32. Следовательно, базовый контент управления является идентичным вышеописанному контенту управления в EV-режиме.
[0042] В состоянии, в котором транспортное средство остановлено (скорость вращения ведущих колес является нулевой), педаль акселератора (не проиллюстрирована) немного нажимается, и в силу этого скорость вращения двигателя становится скоростью вращения, которая является эквивалентной или немного превышающей скорость вращения на холостом ходу. В этом случае для поддержания прекращения вращения выходной шестерни 25, первый мотор-генератор 23 (MG1) вращается в положительном направлении и выступает в качестве электрогенератора. Дополнительно, второй мотор-генератор 32 выводит положительный крутящий момент, соответствующий крутящему моменту при медленном движении, блокировочная муфта CL зацепляется, и скорость вращения второго мотора-генератора 32 является нулевой. В этом состоянии, когда педаль акселератора нажимается, и позиция акселератора увеличивается (время t1), скорость вращения двигателя и крутящий момент двигателя увеличиваются. Дополнительно, для управления скоростью вращения двигателя как скоростью вращения, обеспечивающей хорошую эффективность использования топлива, увеличивается скорость вращения первого мотора-генератора 23, и увеличивается отрицательный крутящий момент. Кроме того, увеличивается выходной крутящий момент второго мотора-генератора 32. В это время, транспортное средство не движется, и следовательно, второй мотор-генератор 32 не вращается. Следовательно, определяется или оценивается то, что рабочее состояние второго мотора-генератора 32 становится состоянием однофазной блокировки (время t2).
[0043] С момента, когда выполняется определение перехода в состояние однофазной блокировки, сразу снижается гидравлическое давление блокировочной муфты CL. В этом случае гидравлическое давление блокировочной муфты CL может снижаться с предварительно определенным градиентом. Альтернативно гидравлическое давление блокировочной муфты CL может снижаться пошагово, а после этого может снижаться с предварительно определенным градиентом. Управление представляет собой управление для снижения перегрузочной способности по передаваемому крутящему моменту блокировочной муфты CL и принудительного проскальзывания (относительного вращения) блокировочной муфты CL и гидравлического сцепления 33, и, следовательно, в случае если задается целевое гидравлическое давление, управление выполняется, например, посредством управления с прямой связью. Здесь, коэффициент передачи крутящего момента снижается для блокировочной муфты CL и увеличивается для гидравлического сцепления 33. Следовательно, скорость вращения второго мотора-генератора 32 начинает увеличиваться. Здесь, крутящий момент второго мотора-генератора 32 поддерживается равным предыдущему крутящему моменту, или градиент увеличения уменьшается. Как описано выше, состояние однофазной блокировки возникает, когда значение крутящего момента или электрического тока второго мотора-генератора 32 является высоким, и скорость вращения является низкой скоростью вращения. Тем не менее, как описано выше, снижается перегрузочная способность по передаваемому крутящему моменту блокировочной муфты CL, и увеличивается скорость вращения второго мотора-генератора 32. В силу этого не допускается переключение рабочего состояния второго мотора-генератора 32 на состояние однофазной блокировки. Дополнительно, в этом случае крутящий момент второго мотора-генератора 32 передается посредством как блокировочной муфты CL, так и гидравлического сцепления 33. Следовательно, крутящий момент приведения в движение посредством второго мотора-генератора 32 вообще не теряется, и обеспечивается крутящий момент приведения в движение. Кроме того, даже когда жидкость перемешивается или рассекается в гидравлическом сцеплении 33 и вырабатывается тепло, тепло излучается наружу и рост температуры подавляется, поскольку жидкость протекает с циркуляцией внутри гидравлического сцепления 33, масляного радиатора (не проиллюстрирован) и т.п.
[0044] Когда позиция акселератора увеличивается даже после времени t2, скорость вращения двигателя, крутящий момент двигателя и скорость вращения и крутящий момент второго мотора-генератора 32 увеличиваются в ассоциации с ней. Следовательно, мощность приведения в движение транспортного средства увеличивается, транспортное средство начинает движение (время t3), и скорости вращения ведущих колес начинают увеличиваться. В это время позиция акселератора поддерживается как предварительно определенная позиция акселератора, и за счет этого скорость вращения двигателя и крутящий момент двигателя поддерживаются равными значениям, соответствующим позиции акселератора. Дополнительно, крутящий момент первого мотора-генератора 23 поддерживается равным постоянному значению таким образом, что крутящий момент приведения в движение в это время поддерживается, и дополнительно, скорость вращения первого мотора-генератора 23 немного снижается. Затем гидравлическое давление блокировочной муфты CL становится почти нулевым, и блокировочная муфта CL расцепляется. Крутящий момент второго мотора-генератора 32 увеличивается до крутящего момента, соответствующего электрической мощности, вырабатываемой посредством первого мотора-генератора 23, и скорость вращения поддерживается равной почти постоянной скорости вращения. Таким образом, скорость вращения ведущих колес (скорость транспортного средства) достигает постоянного значения и поддерживается (время t4), и после этого крутящие моменты моторов-генераторов 23, 32 поддерживаются равными постоянным значениям. Здесь, после начала движения транспортного средства, в случае если отсутствует вероятность того, что рабочее состояние второго мотора-генератора 32 переключается на состояние однофазной блокировки, блокировочная муфта CL зацепляется. В силу этого можно предотвращать или подавлять проскальзывание и потери динамической мощности, ассоциированные с проскальзыванием на тракте передачи, который идет из второго мотора-генератора 32 на ведущие колеса 31.
[0045] Здесь, изобретение не ограничено вышеописанными конкретными примерами, и возможны различные модификации. Например, изобретение может быть выполнено так, что степень вероятности однофазной блокировки или степень однофазной блокировки определяется или вычисляется, и управление проскальзыванием выполняется в зависимости от определенной или вычисленной степени. В этом случае степень вероятности однофазной блокировки или степень однофазной блокировки может оцениваться на основе включения/выключения переключателя режима движения по бездорожью, скорости вращения колеса, градиента дороги с подъемом, позиции акселератора или требуемого крутящего момента на основе позиции акселератора и т.п. В случае если степень вероятности однофазной блокировки или степень однофазной блокировки, оцененная таким образом, является высокой, т.е. в случае если вероятность однофазной блокировки является более высокой, или тепловая нагрузка в однофазной блокировке больше, величина управления проскальзыванием, т.е. скорость относительного вращения в гидравлическом сцеплении задается равной более высокой скорости вращения.
[0046] Дополнительно, транспортное средство с электрическим приводом, которое представляет собой объект управления в изобретении, вкратце, должно только представлять собой транспортное средство, в котором гидравлическое сцепление и зацепляющий механизм располагаются параллельно на тракте передачи между электромотором, чтобы выводить мощность приведения в движение для движения, и ведущими колесами. Следовательно, например, как показано на фиг. 12, вышеописанное гидравлическое сцепление 33 и блокировочная муфта CL могут располагаться между ведомой шестерней 27 и ведущей шестерней 28 на обратном валу 26. Дополнительно, в изобретении помимо управления для того, чтобы формировать проскальзывание (относительное вращение) в гидравлическом сцеплении посредством расцепления зацепляющего механизма как зацепляющий механизм, так и гидравлическое сцепление могут устанавливаться в состояние проскальзывания и как величина проскальзывания зацепляющего механизма, так и величина проскальзывания гидравлического сцепления могут увеличиваться в случае, если определяется или оценивается то, что возникает состояние однофазной блокировки. Вкратце, необходимо только наличие конфигурации осуществления управления для того, чтобы увеличивать скорость вращения электромотора, который сцепляется с гидравлическим сцеплением и зацепляющим механизмом.
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство управления для транспортного средства
Устройство управления для устройства передачи динамической мощности

