Результат интеллектуальной деятельности: ТАЗОБЕДРЕННЫЙ УЗЕЛ ЭКЗОСКЕЛЕТА ИЛИ ОРТЕЗА
Вид РИД
Изобретение
[0001] Заявляемое изобретение относится к области удовлетворения жизненных потребностей человека и может быть использовано в туризме, спорте, при проведении погрузочно-разгрузочных работ, спасательных и армейских операций.
[0002] Заявляемая конструкция, прежде всего, предназначена для использования в пассивных экзоскелетах, приводимых в движение мышечной силой человека и снимающих нагрузку с опорно-мышечного аппарата при переноске тяжестей. При этом заявляемый тазобедренный узел экзоскелета полностью реализует двигательные функции тазобедренного сустава человека, то есть обеспечивает отведение и приведение, сгибание и разгибание бедра, а также отведение и приведение стопы (поворот ноги вокруг своей вертикальной оси).
[0003] Известно тазобедренное сочленение тазового и бедренного звеньев экзоскелета, описанное в патенте на Полезную модель RU 136336, A61F 2/60, 2014, содержащее кронштейн и первую, вторую и третью кинематические цилиндрические вращательные пары. Первая и вторая кинематические пары выполнены в виде вращательных пар с подвижными звеньями, а третья кинематическая пара - в виде вращательной пары с одним неподвижным и одним подвижным звеньями.
[0004] Первое подвижное звено первой кинематической пары жестко смонтировано на одном конце кронштейна, первое подвижное звено второй кинематической пары - на другом конце кронштейна, а неподвижное звено третьей кинематической пары - на втором подвижном звене второй кинематической пары. Геометрические оси вращения первой и второй кинематических пар лежат в одной плоскости и перпендикулярны друг другу, а геометрическая ось третьей кинематической пары перпендикулярна геометрической оси вращения второй кинематической пары.
[0005] Кронштейн снабжен прямолинейными участками, выполненными с возможностью изменения и фиксации стопорами их длины, вторая кинематическая пара снабжена управляемым механизмом ее фиксации, и в состав тазобедренного шарнирного узла экзоскелета введены средство управления механизмом фиксации второй кинематической пары.
[0006] Недостатком этого тазобедренного узла является несоответствие геометрической оси третьей кинематической пары и вертикальной оси ноги человека, вокруг которой происходит поворот стопы, что ограничивает подвижность и снижает безопасность использования экзоскелета.
[0007] Известен тазобедренный узел грузового экзоскелета пассивного типа, полностью реализующий функции движения тазобедренного сустава человека (см. патент RU 2563209, А61Н 3/00, 2014), включающий тазобедренный рычаг, выполненный в виде пространственной оболочки и шарнирно связанный с каркасом и голеностопным рычагом.
[0008] Каркас состоит из плечевого блока и соединенного с ним спинным карданным узлом поясничного блока, состоящего из пояса-коромысла, изогнутого по форме поясничной области тела человека, где в верхней серединной точке коромысла крепится опорная площадка спинного кардана. Концы коромысла с элементами крепления колец карданов опущены и находятся на уровне тазобедренных суставов.
[0009] Соединение пространственной оболочки тазобедренного рычага с каркасом осуществляется посредством кольцевых карданов с двумя степенями свободы поворота тазобедренных рычагов, основания которых через угловые консоли связаны с площадками скольжения. Последние установлены на пространственных оболочках тазобедренных рычагов с возможностью перемещения консоли по дуговым направляющим площадок при изменении угла между каркасом и пространственными оболочками тазобедренных рычагов.
[0010] Недостатком этого тазобедренного узла является высокая сложность и большая масса конструкции.
[0011] Технический результат предлагаемого изобретения заключается в расширении арсенала технических средств тазобедренных узлов пассивных экзоскелетов или ортезов, полностью реализующих функции тазобедренного сустава человека, за счет увеличения подвижности, упрощения конструкции и уменьшения массы.
[0012] Указанный технический результат достигается за счет того, что тазобедренный узел содержит Г-образный рычаг, предназначенный для шарнирной установки первым концом на тазовом элементе экзоскелета или ортеза. Первый опорный элемент шарнирно закреплен первым концом на втором конце Г-образного рычага и имеет на своем втором конце первый соединительный элемент.
[0013] Второй опорный элемент предназначен для установки на бедренном звене экзоскелета или ортеза и имеет второй соединительный элемент. Первый и второй соединительные элементы образуют подвижное соединение, обеспечивающее относительное вращение первого и второго опорных элементов с тремя степенями свободы.
[0014] Телесный угол, определяющий диапазон относительного вращения первого и второго опорных элементов, выбирается исходя из антропометрических особенностей и характеристик ноги человека, в частности угла отведения/приведения стопы. Кроме того, телесный угол может быть ограничен требованиями к устойчивости конструкции экзоскелета, необходимой для исключения возможности травмирования оператора экзоскелета, особенно при выполнении погрузочно-разгрузочных работ с большим весом груза.
[0015] В частном случае исполнения, по крайней мере, один из соединительных элементов может быть выполнен с возможностью перемещения относительно соответствующего опорного элемента. Такое перемещение может быть полезным для улучшения общей подвижности экзоскелета, особенно при наклонах туловища вперед.
[0016] В конкретном случае исполнения, по крайней мере, один из соединительных элементов может быть выполнен в виде шарнира с тремя степенями свободы, а другой соединительный элемент выполнен с возможностью перемещения относительно шарнира, по крайней мере, с одной степенью свободы.
[0017] Предпочтительным является такое выполнение, при котором первый соединительный элемент выполнен в виде штыря, второй соединительный элемент выполнен в виде сферического подшипника, наружное кольцо которого зафиксировано на втором опорном элементе, а штырь расположен в отверстии внутреннего кольца сферического подшипника.
[0018] Также предпочтительным является такое выполнение, при котором первый соединительный элемент выполнен в виде штыря, второй соединительный элемент выполнен в виде сферического подшипника, наружное кольцо которого зафиксировано на втором опорном элементе, а штырь расположен в отверстии внутреннего кольца сферического подшипника с возможностью осевого перемещения.
[0019] В частном случае исполнения первый соединительный элемент может быть выполнен в виде штыря, второй соединительный элемент выполнен в виде втулки из упругого материала, зафиксированной в отверстии второго опорного элемента, а штырь расположен в отверстии втулки.
[0020] Предпочтительно, чтобы штырь был расположен в отверстии втулки с натягом.
[0021] Также предпочтительно такое выполнение, при котором первый соединительный элемент может быть выполнен в виде штыря, второй соединительный элемент выполнен в виде втулки из упругого материала, зафиксированной в отверстии второго опорного элемента, а штырь расположен в отверстии втулки с возможностью осевого перемещения.
[0022] В частном случае исполнения, по крайней мере, один из соединительных элементов может быть установлен на соответствующем опорном элементе с возможностью кругового или плоскопараллельного перемещения.
[0023] Предпочтителен такой вариант выполнения, при котором первый соединительный элемент может быть выполнен в виде штыря, размещенного на эксцентричном валу, установленном на первом опорном элементе с возможностью вращения. При этом второй соединительный элемент выполнен в виде сферического подшипника, наружное кольцо которого зафиксировано на втором опорном элементе, а штырь расположен в отверстии внутреннего кольца сферического подшипника.
[0024] Также предпочтительно такое выполнение, при котором первый соединительный элемент выполнен в виде штыря, размещенного на эксцентричном валу, установленном на первом опорном элементе с возможностью вращения. При этом второй соединительный элемент выполнен в виде сферического подшипника, наружное кольцо которого зафиксировано на втором опорном элементе, а штырь расположен в отверстии внутреннего кольца сферического подшипника с возможностью осевого перемещения.
[0025] Вышеизложенное представляет собой краткое изложение сущности изобретения и, таким образом, может содержать упрощения, обобщения, включения и/или исключения подробностей; следовательно, специалистам в данной области техники следует принять во внимание, что данное краткое изложение сущности изобретения является только иллюстративным и не подразумевает какое-либо ограничение.
[0026] Для лучшего понимания сути предлагаемого технического решения ниже приводится описание конкретного примера выполнения, не являющееся ограничительным примером практической реализации грузового экзоскелета в соответствии с заявляемым изобретением со ссылками на чертежи, на которых представлено следующее.
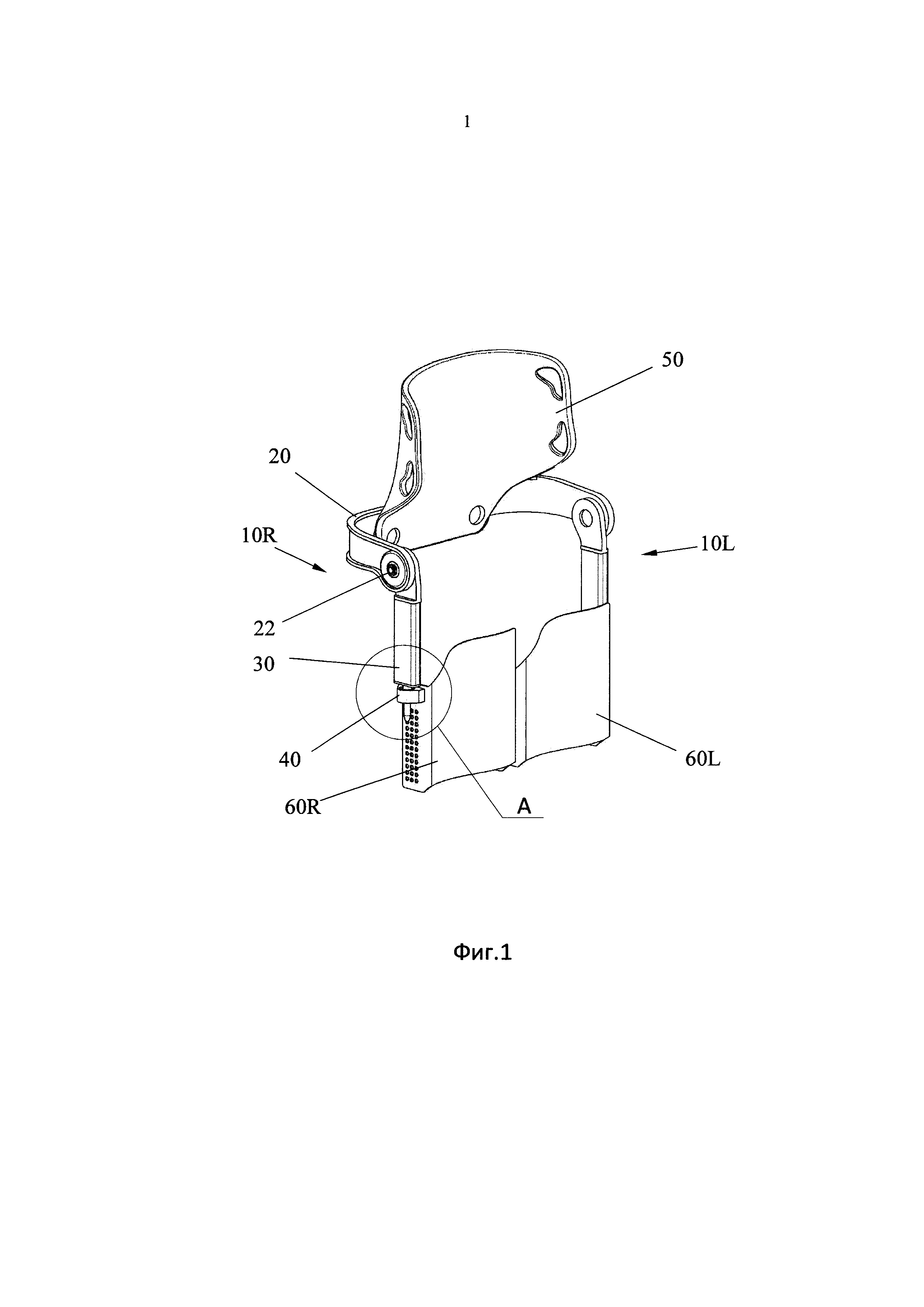
[0027] На фиг. 1 изображены тазобедренные узлы, установленные на тазовом элементе экзоскелета, аксонометрия вид спереди.
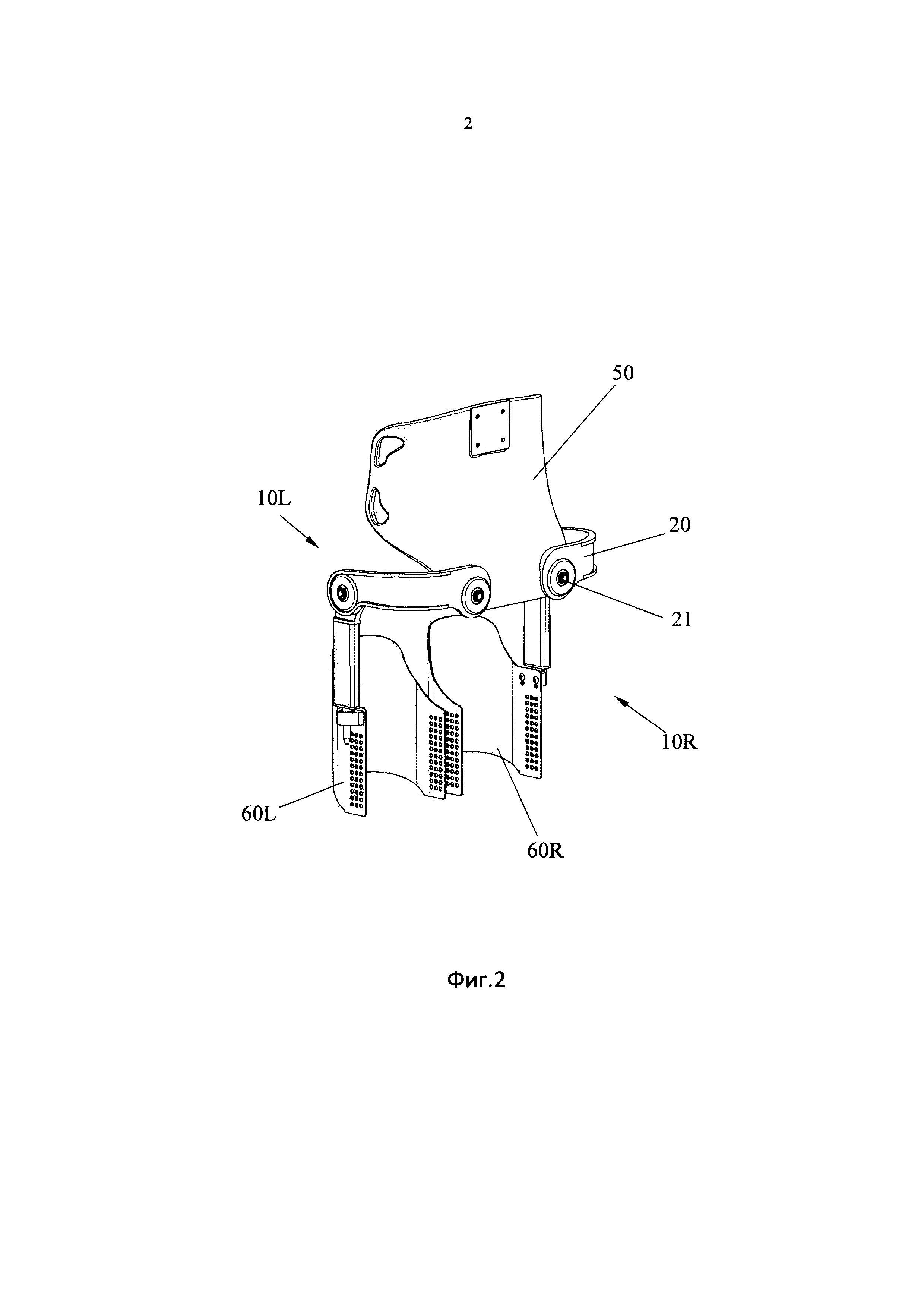
[0028] На фиг. 2 изображены тазобедренные узлы, установленные на тазовом элементе экзоскелета, аксонометрия вид сзади.
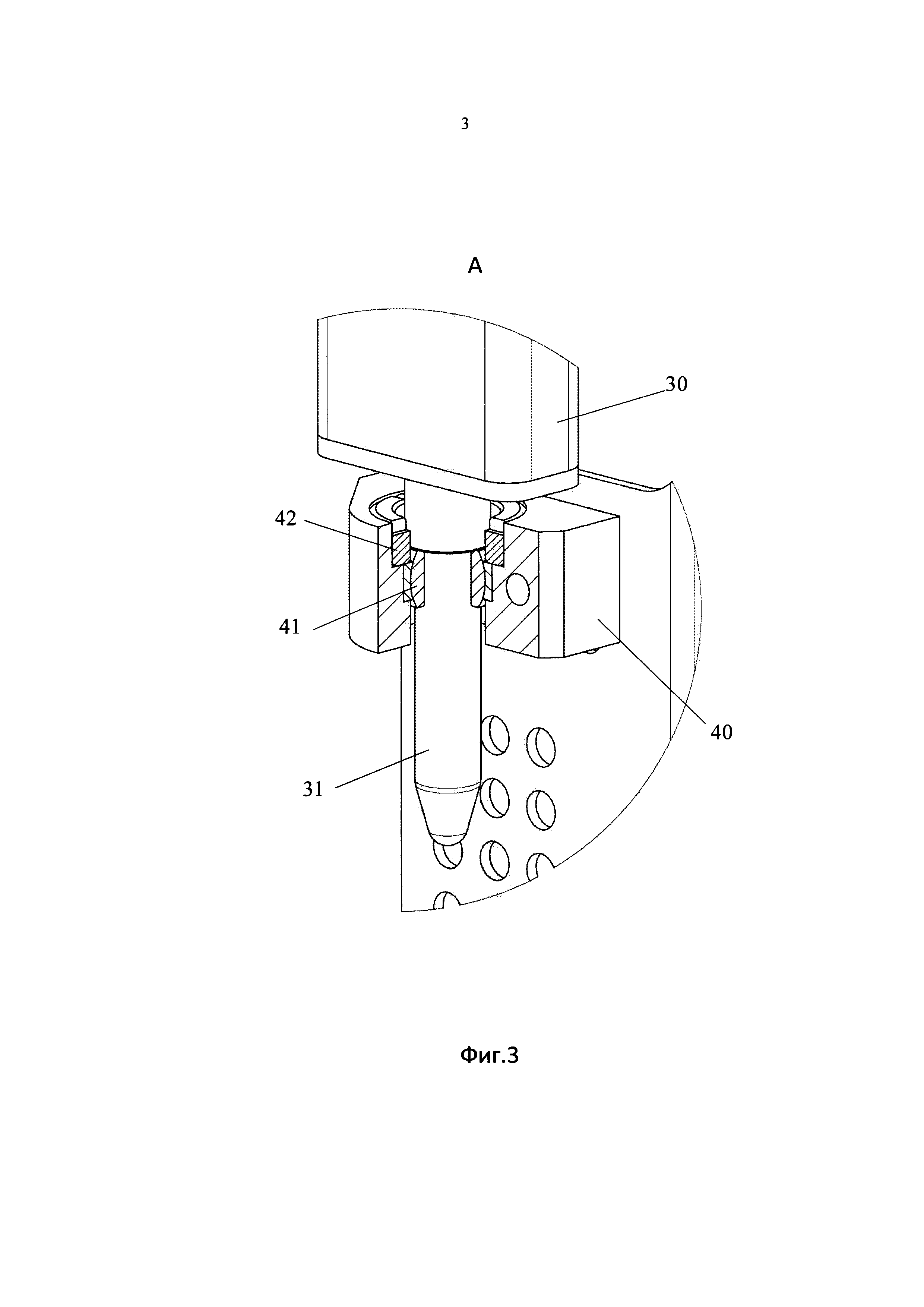
[0029] На фиг. 3 изображен вид А на фиг. 1, пример 1.
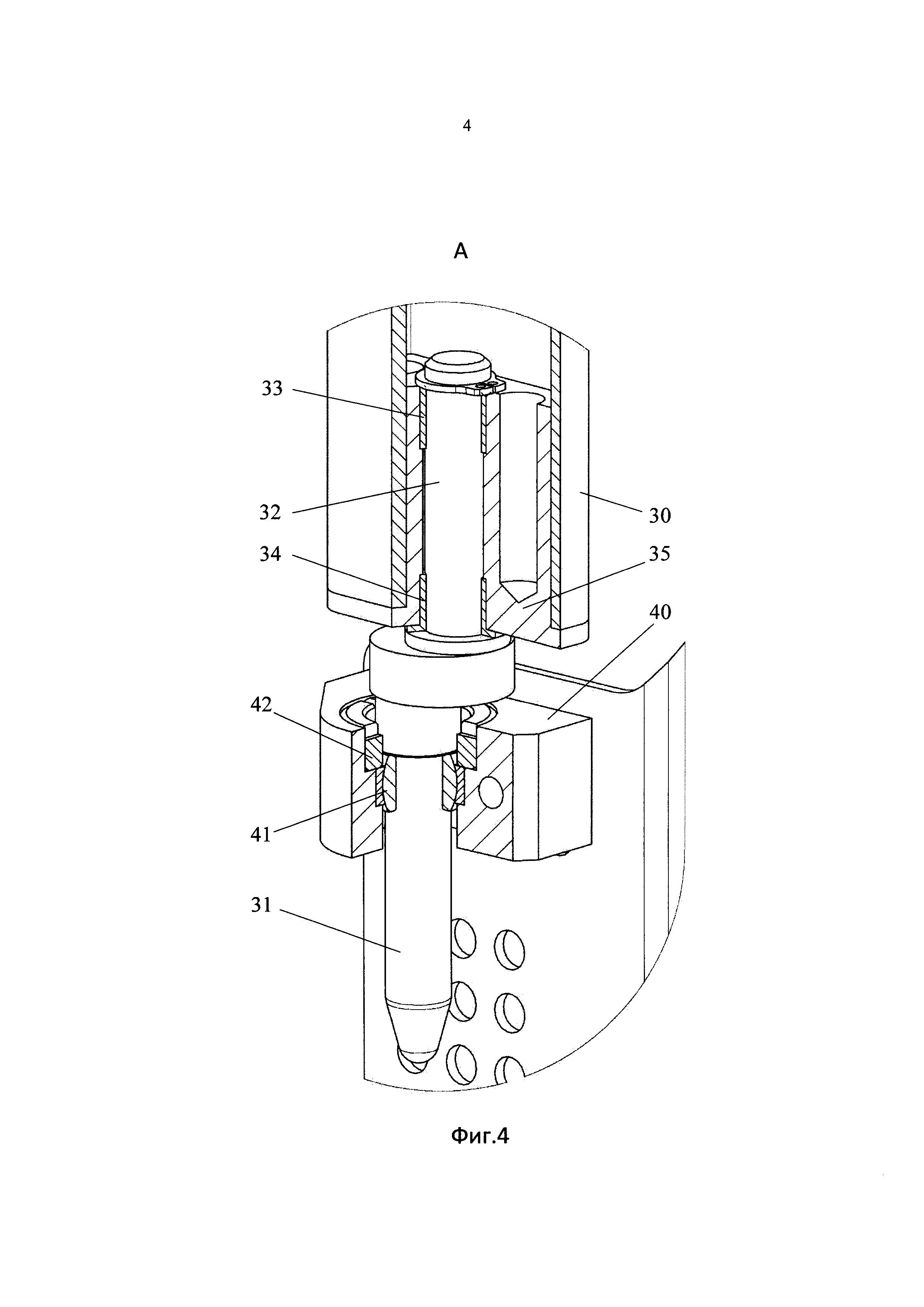
[0030] На фиг. 4 изображен вид А на фиг. 1, пример 2.
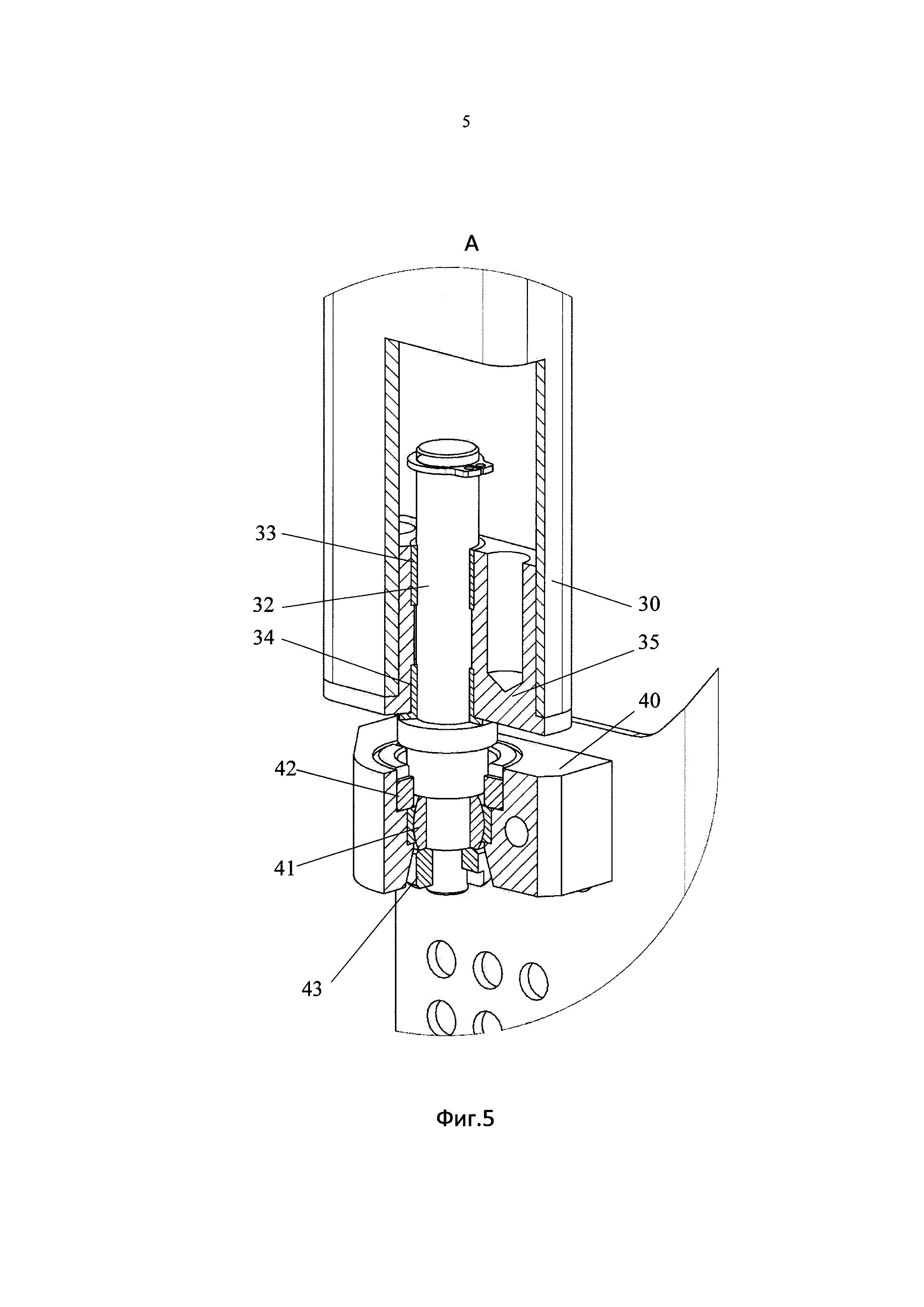
[0031] На фиг. 5 изображен вид А на фиг. 1, пример 3.
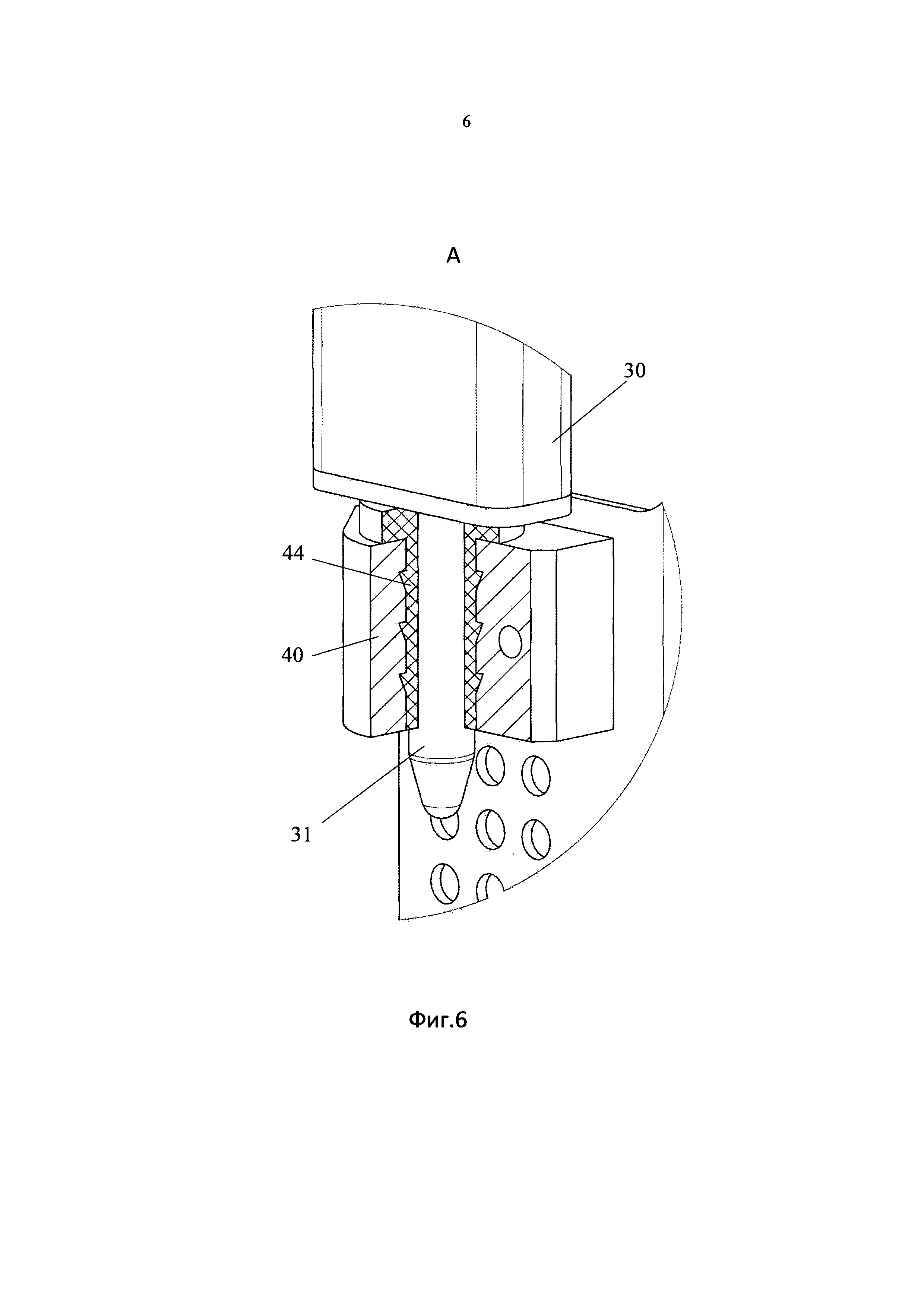
[0032] На фиг. 6 изображен вид А на фиг. 1, пример 4.
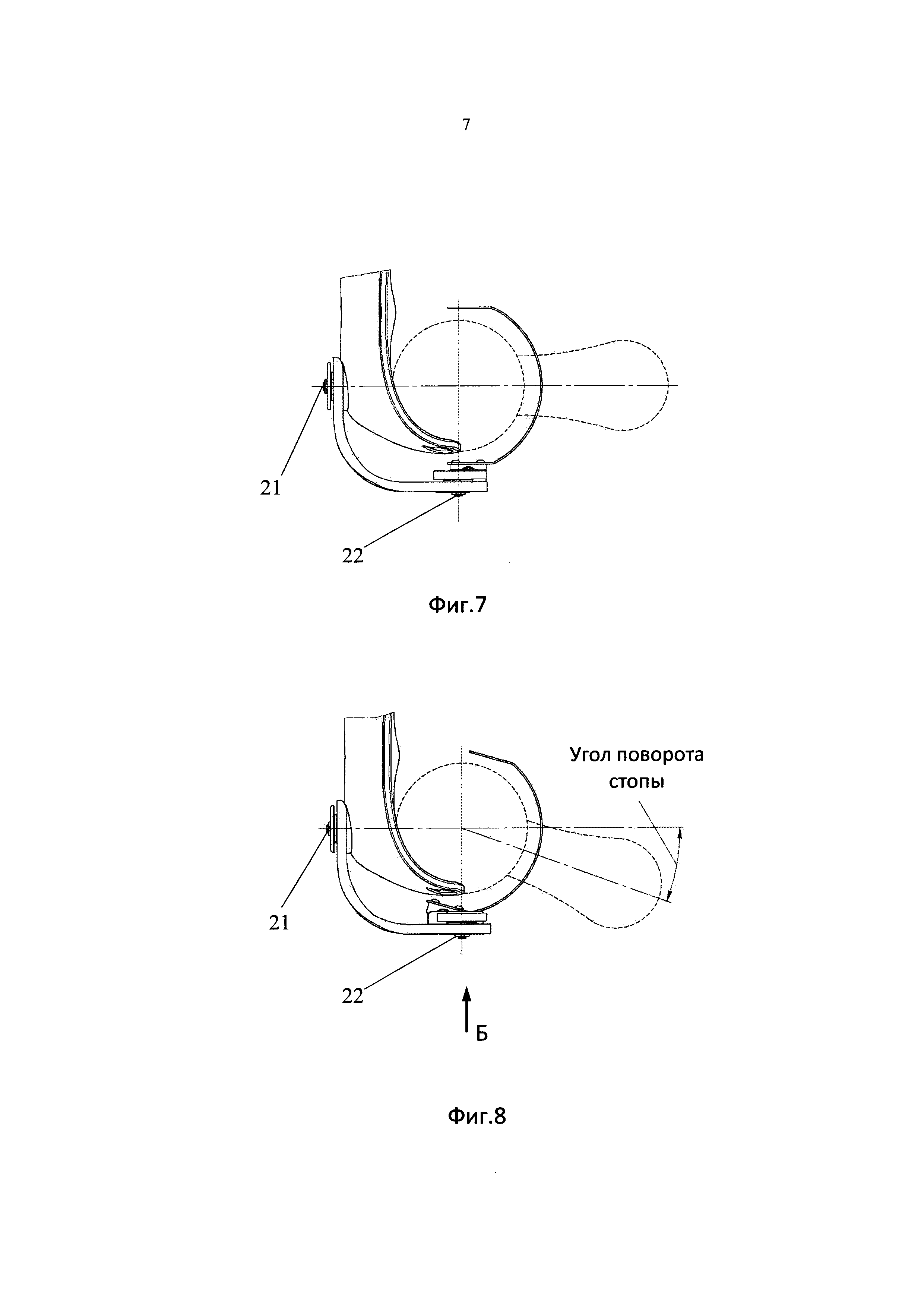
[0033] На фиг. 7 изображен тазобедренный узел, исходное положение стопы, вид сверху.
[0034] На фиг. 8 изображен тазобедренный узел, повернутое положение стопы, вид сверху.
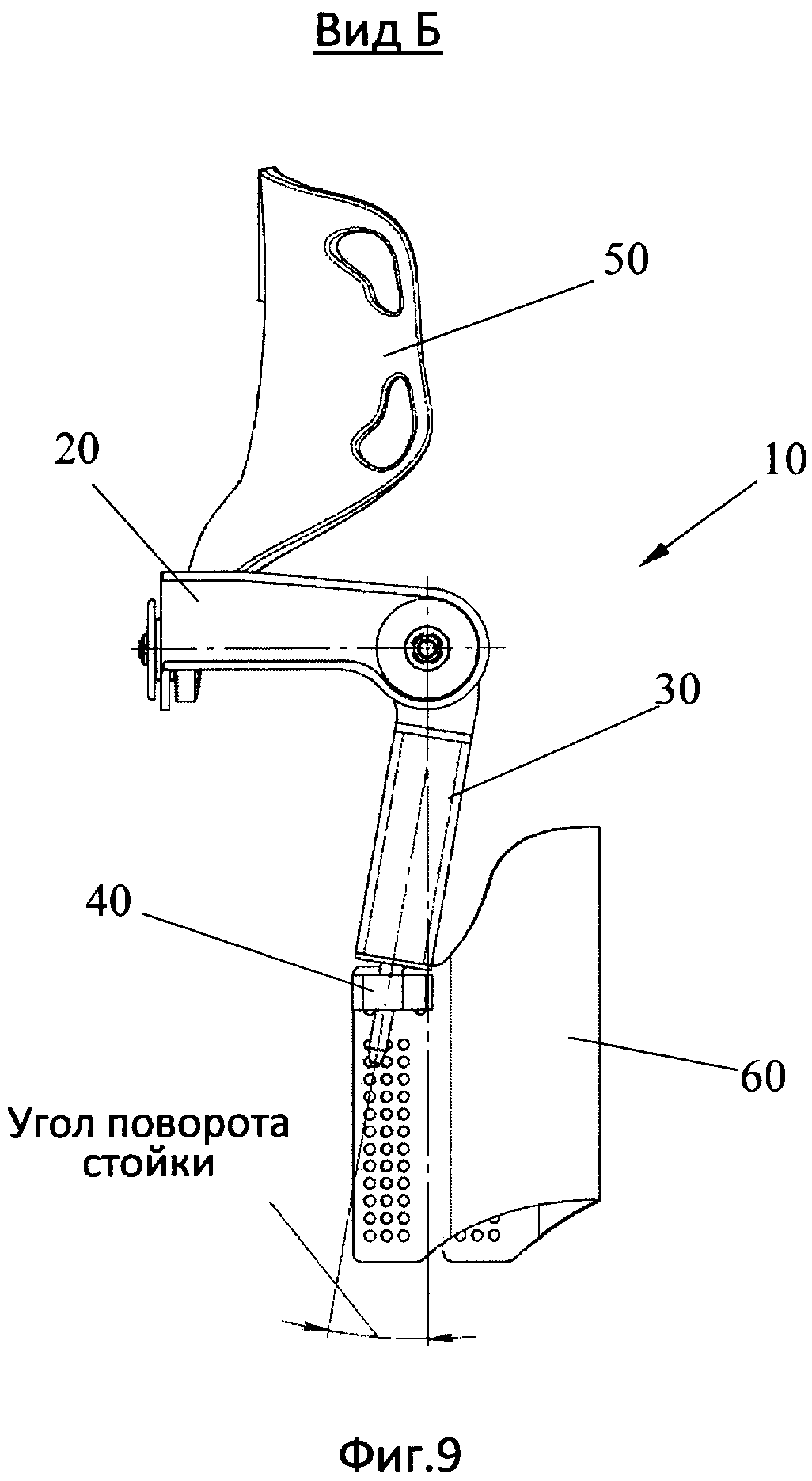
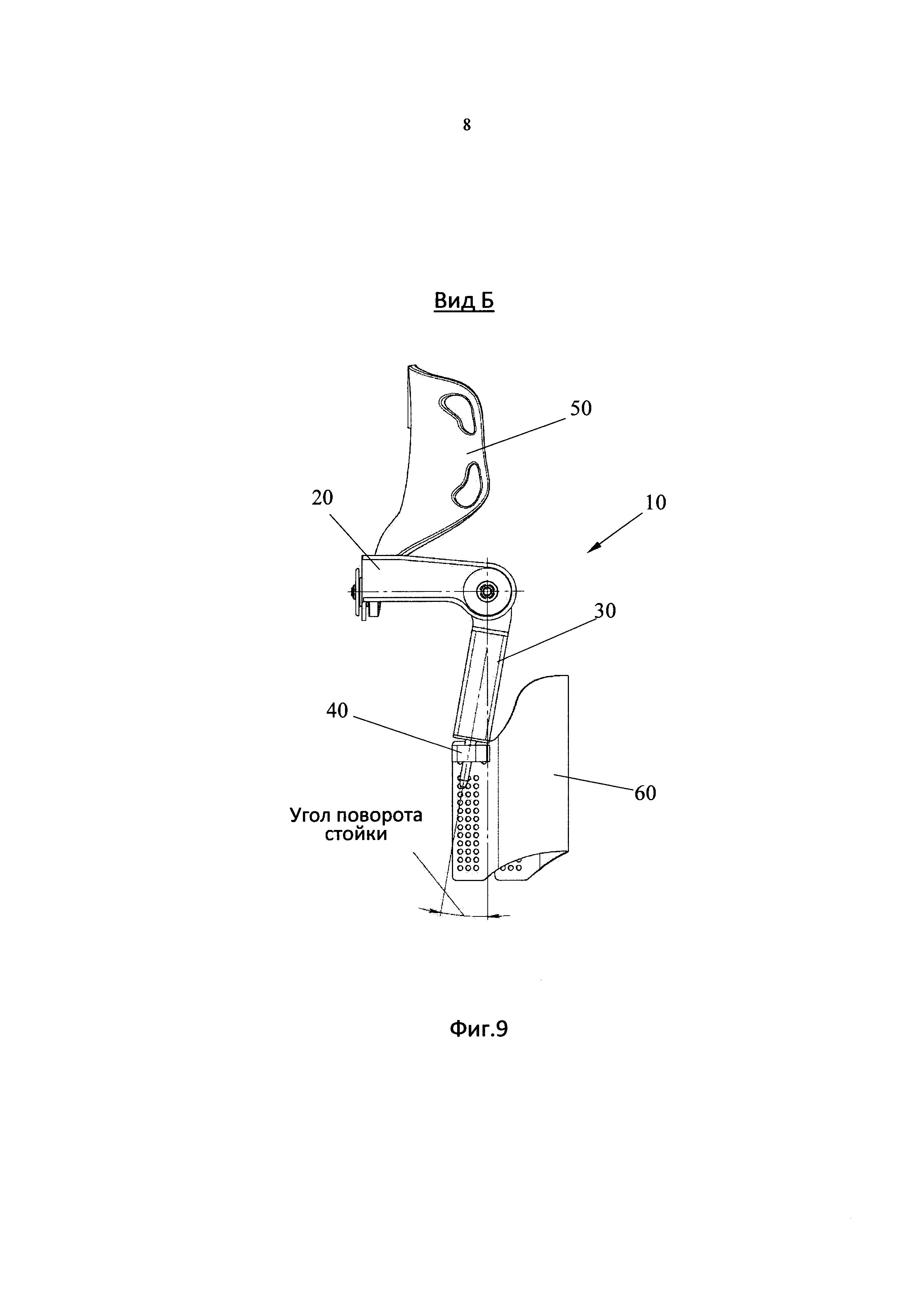
[0035] На фиг. 9 изображен вид Б на фиг. 8.
[0036] Следует учесть, что на чертежах представлены только те детали, которые необходимы для понимания существа предложения, а сопутствующее оборудование, хорошо известное специалистам в данной области, на чертежах не представлено.
[0037] На фиг. 1 и 2 изображены соответственно правый 10R и левый 10L тазобедренные узлы. Тазобедренные узлы имеют аналогичную конструкцию и, как следует из симметрии человека, выполнены симметрично (зеркально) относительно сагиттальной плоскости. В дальнейшем для простоты будет описано выполнение только правого тазобедренного узла 10R.
[0038] Тазобедренный узел 10 включает в себя Г-образный рычаг 20, первый опорный элемент 30 и второй опорный элемент 40. Рычаг 20 при помощи расположенного на его первом конце шарнира 21 установлен на тазовом элементе 50 экзоскелета с возможностью поворота.
[0039] Первый опорный элемент 30 выполнен в виде стойки и шарнирно закреплен своим первым концом на втором конце рычага 20 с помощью шарнира 22. Второй опорный элемент 40 установлен на элементе бедра 60 экзоскелета.
[0040] На фиг. 3 показан первый пример выполнения подвижного соединения первого и второго опорных элементов. В этом примере первый соединительный элемент, расположенный на втором конце первого опорного элемента 30, выполнен в виде штыря 31. Второй соединительный элемент выполнен в виде стандартного сферического подшипника скольжения 41, наружное кольцо которого установлено в отверстии второго опорного элемента 40 и зафиксировано гайкой 42.
[0041] Штырь 31 расположен в отверстии внутреннего кольца сферического подшипника 41. В данном конкретном примере штырь 31 установлен с возможностью осевого перемещения. Однако специалисту в данной области техники будет понятно, что штырь 31 может быть жестко зафиксирован относительно внутреннего кольца сферического подшипника 41, например так, как будет показано далее.
[0042] На фиг. 4 показан второй пример выполнения подвижного соединения первого и второго опорных элементов. В этом примере первый соединительный элемент, расположенный на втором конце первого опорного элемента 30, выполнен в виде штыря 31, размещенного на эксцентричном валике 32. Валик 32 установлен с возможностью вращения в подшипниках 33 и 34, расположенных в отверстии вставки 35 первого опорного элемента 30.
[0043] Второй соединительный элемент выполнен в виде стандартного сферического подшипника скольжения 41, наружное кольцо которого установлено в отверстии второго опорного элемента 40 и зафиксировано гайкой 42. Штырь 31 расположен в отверстии внутреннего кольца сферического подшипника 41. В данном конкретном примере штырь 31 установлен с возможностью осевого перемещения.
[0044] Эксцентричная установка штыря 31 за счет сочетания его кругового движения и вращательного движения в подшипнике 41 позволяет расширить диапазон поворота бедренного звена 60 экзоскелета вокруг вертикальной оси ноги человека. Специалисту в данной области техники понятно, что круговое движение эксцентрика может быть заменено плоскопараллельным, например, за счет использования рычажных механизмов.
[0045] На фиг. 5 показан третий пример выполнения подвижного соединения первого и второго опорных элементов. В этом примере первый соединительный элемент, расположенный на втором конце первого опорного элемента 30, выполнен в виде валика 32. Последний установлен с возможностью осевого перемещения в подшипниках 33 и 34, расположенных в отверстии вставки 35 первого опорного элемента 30.
[0046] Второй соединительный элемент выполнен в виде стандартного сферического подшипника скольжения 41, наружное кольцо которого установлено в отверстии второго опорного элемента 40 и зафиксировано гайкой 42. Валик 32 свободным концом зафиксирован в отверстии внутреннего кольца сферического подшипника 41 с помощью гайки 43.
[0047] На фиг. 6 показан четвертый пример выполнения подвижного соединения первого и второго опорных элементов. В этом примере первый соединительный элемент, расположенный на втором конце первого опорного элемента 30, выполнен в виде штыря 31. Второй соединительный элемент выполнен в виде втулки 44 из упругого материала, например резины, зафиксированной в отверстии второго опорного элемента 40. В данном конкретном примере штырь 31 установлен с возможностью осевого перемещения.
[0048] Работа тазобедренного узла 60 поясняется фиг. 7-9. Отведение и приведение бедренного звена 60 осуществляется за счет поворота рычага 20 в шарнире 21. Сгибание и разгибание бедренного звена 60 осуществляется за счет поворота рычага 20 в шарнире 22. Отведение и приведение стопы осуществляется за счет поворота штыря 31 (фиг. 3, 4) или валика 32 (фиг. 5) в подшипнике 41, или штыря 31 (фиг. 6) в упругой втулке 44. При этом стойка 30 поворачивается на некоторый угол.
[0049] Предлагаемый тазобедренный узел имеет простую конструкцию, содержащую минимальное количество деталей. В качестве шарнирных узлов могут быть применены широко распространенные стандартные подшипники, упрощающие изготовление и эксплуатацию изделия.
[0050] Хотя в данном документе были описаны различные стороны осуществления заявленного изобретения, специалистам в данной области техники понятно, что возможны другие подходы к осуществлению представленного изобретения. Различные стороны и реализация данного изобретения изложены в настоящем описании в иллюстративных целях и не подразумевают ограничения, причем объем защиты настоящего изобретения указан в нижеследующей формуле изобретения.
Голеностопное звено ортеза или экзоскелета
Способ оценки степени реабилитации с использованием активного экзоскелета у пациентов с нарушениями опорно-двигательного аппарата
Привод для экзоскелета
Мобильный робот с автономной навигационной системой (варианты)
Мобильный робот
Способ оценки степени реабилитации с использованием активного экзоскелета у пациентов с нарушениями опорно-двигательного аппарата
Способ оценки эффективности разгрузки пользователя при переносе и удержании грузов с помощью экзоскелета
Грузовой пассивный экзоскелет с настройкой под антропометрические параметры пользователя
Привод для экзоскелета

