Результат интеллектуальной деятельности: Многофункциональный комплекс для выполнения подводно-технических работ
Вид РИД
Изобретение
Изобретение относится к области судостроения, в частности к подводной технике, в том числе к технике для выполнения различных подводно-технических работ (поисковых, водолазных, спасательных), и может быть использовано для разминирования акватории.
Известны необитаемые подводные телеуправляемые аппараты, имеющие движительно-рулевой комплекс, телевизионную, гидроакустическую и навигационную аппаратуру, системы, манипуляторные и другие устройства (см. SU № 336205, 1999; GB № 1345683, 1974; US № 4185580, 1980 и др.), предназначенные для выполнения поисковых и обследовательских работ, а также для выполнения различных подводно-технических работ с помощью манипуляторов без применения водолазного труда.
При выполнении конкретных подводно-технических работ на одном и том же подводном объекте иногда требуется использовать несколько типов привязных самоходных технических средств, что увеличивает стоимость выполнения операций.
Известен также многофункциональный комплекс для выполнения подводно-технических работ, состоящий из бортового модуля, размещенного на судне-носителе и включающего спускоподъемное устройство, средства энергопитания, средство управления мобильного модуля, и мобильный модуль, содержащий самоходную платформу с движителями, антеннами и датчиками навигационной и гидроакустической аппаратуры и функциональный подводный аппарат, выполненный с возможностью базирования на платформе и электроснабжения через нее (см. RU № 2220880, МПК B63G8/00, B63C11/34, 2000). Платформа является подводной и связана с судном-носителем по кабелю.
Недостаток такого решения - невозможность оперативного и безопасного обследования акватории с выявлением или уничтожением мин, поскольку и платформа, и подводный аппарат выполнены привязными и потому не могут исключить подрыв судна-носителя на мине. Кроме того, платформа выполнена подводной и плохообтекаема, что снижает скорость ее перемещения по акватории.
Задачей заявляемого изобретения является повышение оперативности и безопасности обследования акватории и ее разминирования.
Технический результат, проявляющийся при решении поставленной задачи, выражается в повышении безопасности обследования акватории и ее разминирования (исключается взрыв мины, близкий от судна-носителя, угрожающий его живучести), поскольку расстояние от судна-носителя до платформы не лимитируется длиной кабеля. Кроме того, минимизируется опасность потери платформы при взрыве мины во время работы с ней подводного аппарата (платформа находится на поверхности, имеет сравнительно небольшой вес и размеры при небольшой осадке, при этом она может быть удалена от подводного аппарата на длину кабеля). Кроме того, повышается оперативность обследования акватории, поскольку ее предварительную разведку осуществляют с платформы, способной передвигаться с достаточно высокой скоростью и сканировать акваторию на пути своего следования с использованием смонтированной на ней аппаратуры освещения подводной обстановки, позволяющей оперативно выявить местоположение в толще акватории объектов, потенциально способных оказаться минами, а затем уточнить статус этих объектов или их части с использованием аппаратуры, смонтированной на подводном аппарате, и, при необходимости, обеспечить их подрыв или перерезать минрепы.
Сущность заявляемого изобретения заключается в том, что многофункциональный комплекс для выполнения подводно-технических работ, состоящий из бортового модуля, размещенного на судне-носителе и включающего спускоподъемное устройство, средства энергопитания, средство управления мобильного модуля, содержащего самоходную платформу с движителями, антеннами и датчиками навигационной и гидроакустической аппаратуры и функциональный подводный аппарат, выполненный с возможностью базирования на платформе и электроснабжения через нее, отличается тем, что платформа выполнена как надводное плавсредство, снабжена четырьмя одинаковыми движителями, расположенными в угловых оконечностях, равноудаленными от центра платформы, системой управления которой интегрирована с системой динамического позиционирования платформы, при этом корпус платформы содержит камеру, выполненную с возможностью размещения в ней функционального подводного аппарата, кроме того, в качестве движителей использованы винторулевые колонки, снабженные электродвигателями, при этом платформа снабжена спускоподъемным устройством, выполненным с возможностью опускания и подъема подводного аппарата, кроме того, платформа снабжена источником электроэнергии, выполненным с возможностью обеспечения функционирования систем платформы и функционального подводного аппарата в любом сочетании, кроме того, система управления комплексом выполнена радиоуправляемой с возможностью передачи на судно-носитель информации, полученной аппаратурой самоходной платформы и функционального подводного аппарата по радиоканалу. Кроме того, платформа снабжена кабельным разъемом для передачи электроэнергии и команд управления по кабелю на функциональный подводный аппарат и информации от него на систему управления платформы с возможностью ее передачи по радиоканалу на судно. Кроме того, в качестве источника электроэнергии использован накопитель электроэнергии или компактный электрогенератор. Кроме того, корпус платформы выполнен обтекаемым вдоль продольной оси.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналогов свидетельствует о соответствии заявленного решения критерию «новизна».
Признаки отличительной части формулы изобретения решают следующие функциональные задачи.
Признак, указывающий, что «платформа выполнена как надводное плавсредство», обеспечивает возможность ее более скоростного перемещения, по сравнению с перемещением под водой и минимизирует опасность потери платформы при взрыве мины во время работы с ней подводного аппарата.
Признаки, указывающие, что платформа «снабжена четырьмя одинаковыми движителями, расположенными в угловых оконечностях, равноудаленными от центра платформы», обеспечивают высокую маневренность платформы и возможность интегрирования системы ее управления в систему динамического позиционирования платформы.
Признаки, указывающие, что система управления платформы «интегрирована с системой динамического позиционирования платформы», обеспечивают возможность длительного удержания платформы в конкретной точке акватории.
Признаки, указывающие, что «корпус платформы содержит камеру, выполненную с возможностью размещения в ней функционального подводного аппарата», исключают возможность ухудшения гидродинамических характеристик платформы в режиме транспортировки подводного аппарата из-за сопротивления движению его корпуса (если бы он находился вне камеры) в процессе обследования акватории аппаратурой платформы).
Признаки, указывающие, что «в качестве движителей использованы винторулевые колонки, снабженные электродвигателями», обеспечивают высокую маневренность платформы и возможность сложения импульсов тяги от движителей (для повышения скорости движения) при движении платформы по акватории.
Признак, указывающий, что «платформа снабжена спускоподъемным устройством, выполненным с возможностью опускания и подъема подводного аппарата», обеспечивает перевод подводного аппарата в рабочее или транспортное положение, при котором он не оказывает сопротивления движению.
Признаки, указывающие, что «платформа снабжена источником электроэнергии, выполненным с возможностью обеспечения функционирования систем платформы и функционального подводного аппарата в любом сочетании», обеспечивают работоспособность систем платформы при одновременном включении в работу такого количества систем и механизмов, какое необходимо для успешного выполнения конкретного этапа работы.
Признаки, указывающие, что «система управления комплексом выполнена радиоуправляемой, с возможностью передачи на судно-носитель информации, полученной аппаратурой самоходной платформы и функционального подводного аппарата по радиоканалу», обеспечивают реализацию непривязного режима работы платформы и дистанционную передачу информации на судно-носитель.
Признаки, указывающие, что «платформа снабжена кабельным разъемом для передачи электроэнергии и команд управления по кабелю на функциональный подводный аппарат и информации от него на систему управления платформы с возможностью ее передачи по радиоканалу на судно», обеспечивают работоспособность и управляемость подводного аппарата и его информационный обмен с системой управления комплексом.
Признаки, указывающие, что «в качестве источника электроэнергии использован накопитель электроэнергии или компактный электрогенератор» конкретизируют возможные варианты решения вопросов энергоснабжения мобильного модуля.
Признак, указывающий, что «корпус платформы выполнен обтекаемым вдоль продольной оси», обеспечивает возможность движения платформы с высокой скоростью вдоль ее продольной оси.
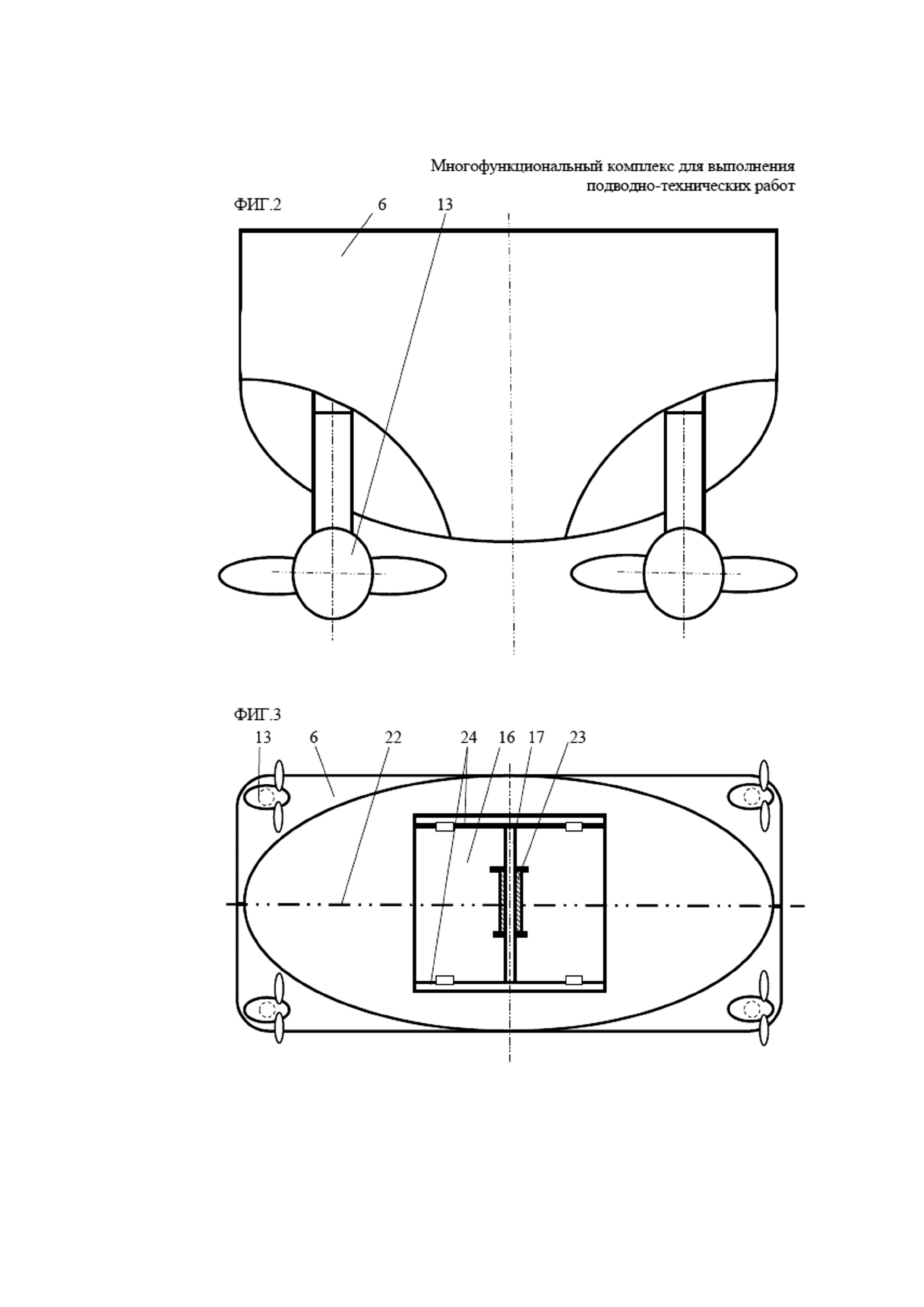
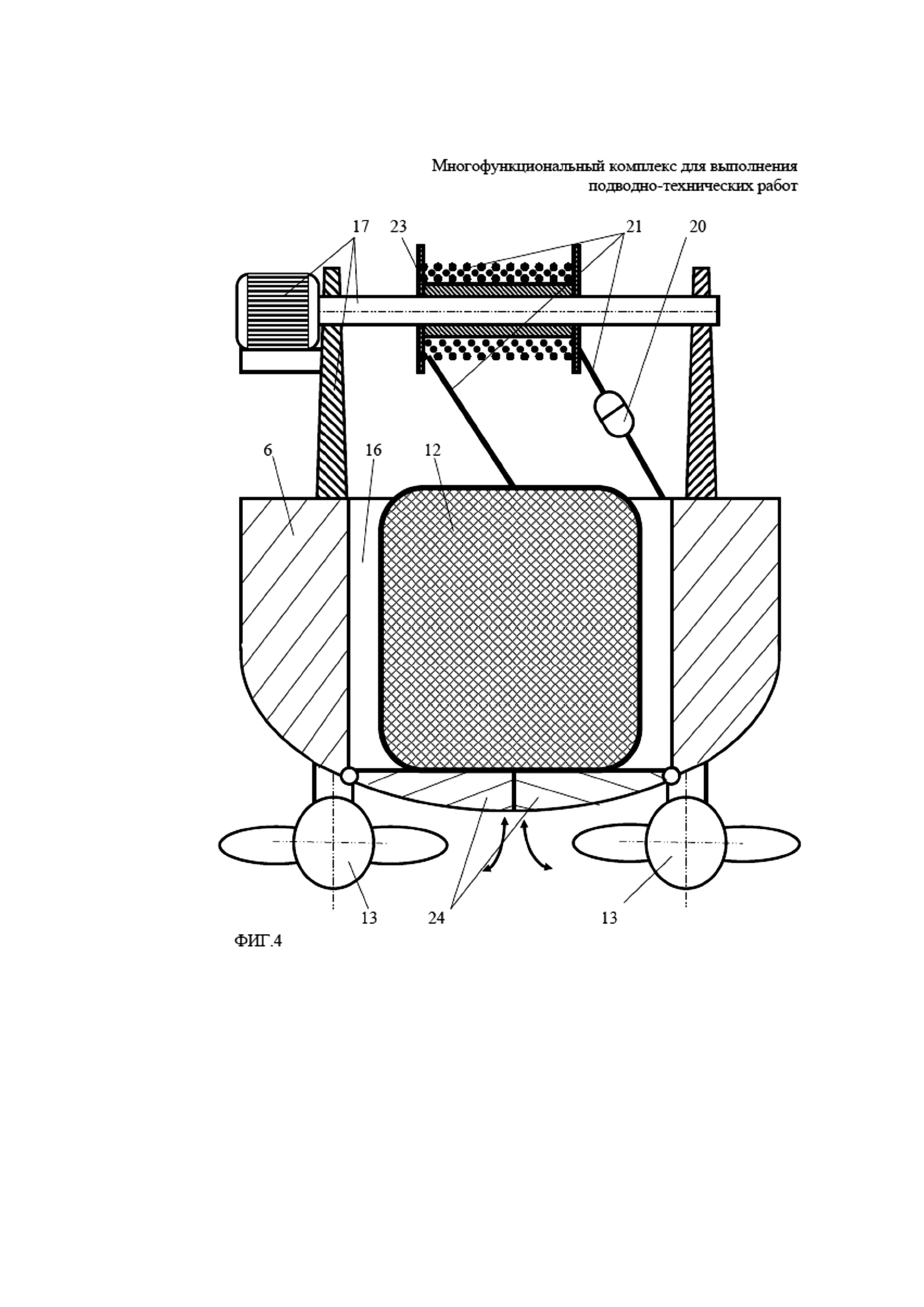
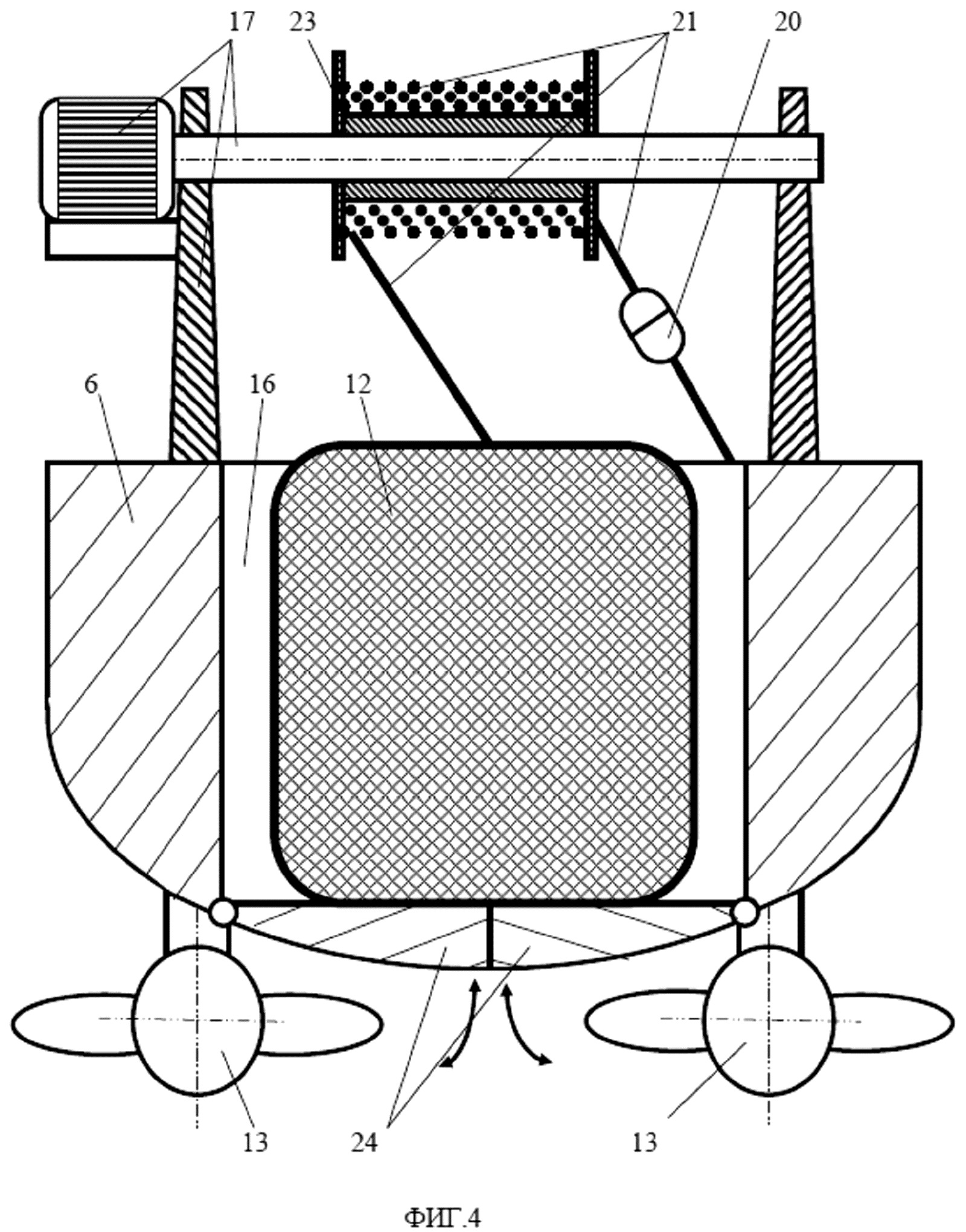
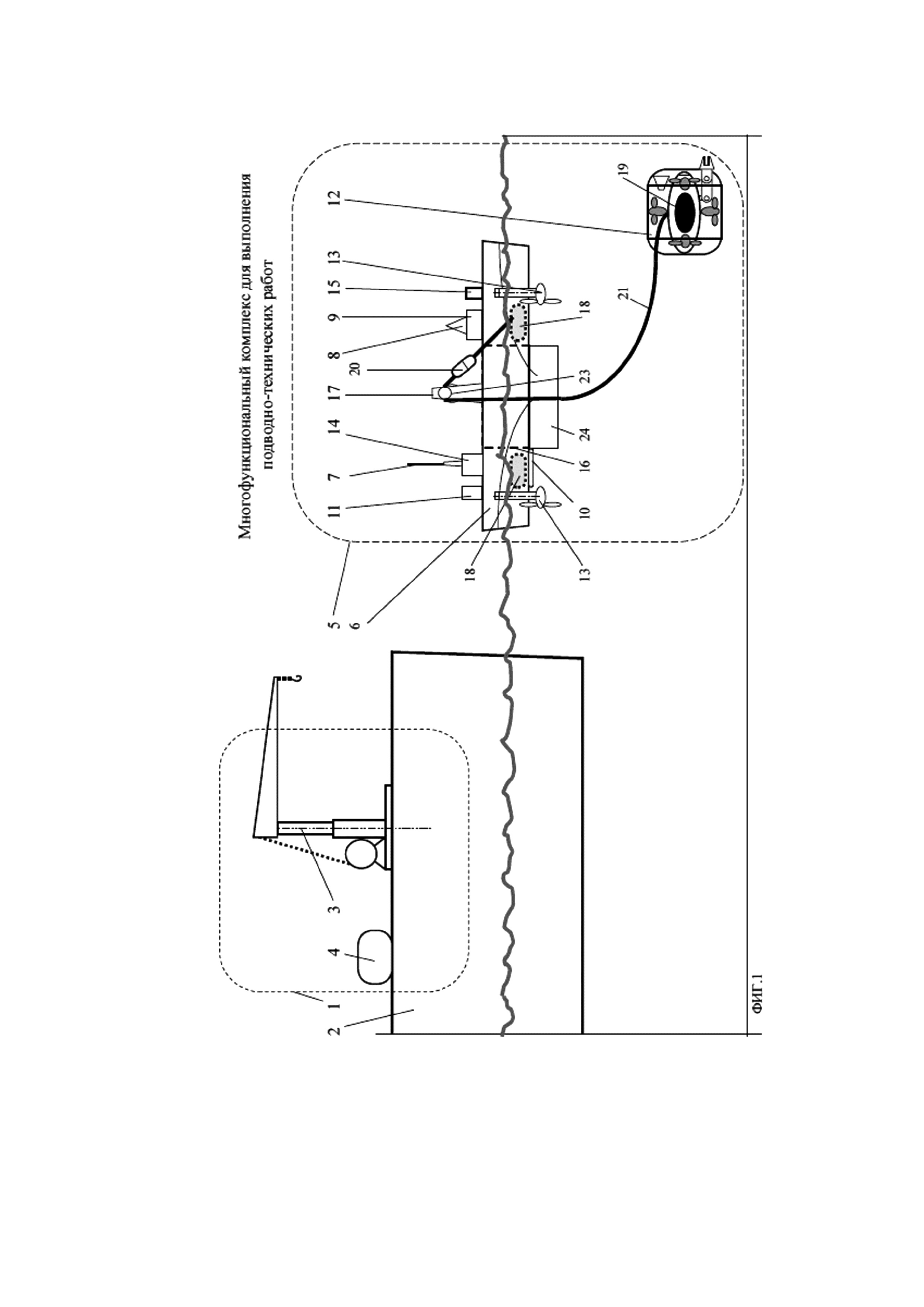
На фиг.1 показан полный комплект комплекса в развернутом положении; на фиг.2 показан вид платформы с кормы или с носа; на фиг. 3 показан вид платформы снизу, при раскрытой камере; вид сбоку, на фиг. 4 показан поперечный разрез платформы по камере.
На чертежах показаны бортовой модуль 1, судно-носитель 2, его спускоподъемное устройство 3, средство управления 4, мобильный модуль 5, самоходная платформа 6, антенны 7, датчики 8 навигационной аппаратуры 9, датчики 10 гидроакустической аппаратуры 11, функциональный подводный аппарат 12, движители 13 платформы 6, ее система управления 14, система динамического позиционирования 15, камера 16 и спускоподъемное устройство 17 платформы 6, источник электроэнергии 18, аппаратура 19 функционального подводного аппарата 12, кабельный разъем 20, кабель-трос 21, продольная ось 22 платформы 6, кабельный барабан 23, створки 24 камеры 16.
Судно-носитель 2 конструктивно не отличается от судов сходного функционального назначения, кроме варианта, когда оно предназначено только для разминирования – в этом случае оно может быть дополнительно оснащено малокалиберной артустановкой и/или пулеметами (на чертежах не показаны). На судне-носителе 2 смонтирован бортовой модуль 1, включающий спускоподъемное устройство 3, средство управления 4, обеспечивающее управление работой бортового модуля 1 и мобильного модуля 5, а также обмен информацией между судном-носителем и мобильным модулем 5. Средство управления 4 (система управления) комплексом выполнена радиоуправляемой, с возможностью передачи на судно-носитель 2 информации, полученной аппаратурой самоходной платформы 6 и/или функционального подводного аппарата 12 по радиоканалу. В качестве средства энергопитания бортового модуля 1 используется электрогенератор известной конструкции, штатно установленный на судне-носителе (на чертежах не показан).
Самоходная платформа 6 выполнена как надводное плавсредство. Ее корпус выполнен обтекаемым вдоль продольной оси 22. Элементы корпуса платформы 6, в т.ч. палубный настил, переборки, элементы набора и конструктивные элементы камеры 16 выполнены из композитного материала, например из базальтопласта или стеклопластика. Самоходная платформа 6 снабжена четырьмя одинаковыми движителями 13, расположенными в угловых оконечностях, равноудаленными от центра (геометрического) платформы 6 (в качестве движителей использованы винторулевые колонки, снабженные электродвигателями). Платформа 6 снабжена антеннами 7 и датчиками 8 и 10 навигационной 9 и гидроакустической 11 аппаратуры. Набор аппаратуры 7-11 формируется из расчета обеспечения возможности максимально полного освещения подводной обстановки (в частности, выявления местоположения мин (или подобных им объектов) и фиксации их местоположения, в т.ч. через системы JPS и/или «Глонасс». В этой связи целесообразно иметь на борту платформы гидролокатор бокового обзора интегрированный с эхолотом. Корпус платформы 6 содержит камеру 16 (доковую камеру, выполненную как сквозной колодец в корпусе платформы, открытый сверху и снизу), выполненную с возможностью размещения в ней функционального подводного аппарата 12, при этом платформа 6 снабжена собственным спускоподъемным устройством 17, рассчитанным на возможность опускания из нее функционального подводного аппарата 12 и обратного его подъема в камеру 16. Целесообразно, чтобы нижний проем камеры 16 был снабжен створками, позволяющими перекрывать его в процессе транспортировки подводного аппарата и открывать при выпуске подводного аппарата и его работе вне платформы. В качестве источника электроэнергии 18, установленного на платформе 6 может быть использован накопитель электроэнергии (например, литий-полимерные батареи) или компактный электрогенератор. Кроме того, платформа 6 снабжена кабельным разъемом 20 для передачи электроэнергии и команд управления по кабель-тросу 21 на функциональный подводный аппарат 12 и информации от него на систему управления 14 платформы 6 с возможностью ее передачи по радиоканалу на судно-носитель 2. При этом кабельный барабан 23 с запасом кабеля-троса до 80-150 м смонтирован на спускоподъемном устройстве 17 платформы 6. Корпус платформы 6 выполнен обтекаемым вдоль ее продольной оси 22.
Функциональный подводный аппарат 12 снабжен не менее чем шестью движителями, обеспечивающими его свободное маневрирование в толще акватории, и оборудован, предпочтительно, телекамерой с прожектором и манипулятором (на чертежах не показаны). В зависимости от принятой схемы уничтожения мин, на конце манипулятора смонтирован резак, обеспечивающий возможность перерезания минрепов или схват, обеспечивающий возможность закрепления на мине портативного взрывного устройства. При этом кабельный разъем 20 выполнен на свободном конце кабель-троса 21, остающемся на платформе 6, и жестко закрепленным на кабельном барабане 23 (выполненном с возможностью вращения и снабженном приводом) с запасом кабеля-троса до 80-100 м, смонтирован на спускоподъемном устройстве 17 платформы 6. Второй конец кабель-троса 21 введен в корпус подводного аппарата 12 через соответствующий герметичный ввод (на чертежах не показан) и жестко закреплен там.
В связи с достаточно высокой опасностью подрыва функционального подводного аппарата 12, на борту судна-носителя 2 их должно быть не менее двух-трех.
Заявленное устройство работает следующим образом.
В процессе движения судна-носителя 2 к району разминирования, самоходная платформа 6 и функциональный подводный аппарат 12 находятся на его борту в соответствующих отсеках. При подходе к району разминирования, не доходя до его границ, судно носитель 2 известным образом становится на якорь (если позволяют глубины акватории) или фиксируется на безопасной точкес использованием судовой системы динамического позиционирования.
Если известные границы минных полей недостаточно достоверны, то с использованием самоходной платформы 6 проводят разведку безопасных путей подхода судна-носителя 2 ближе к границам района разминирования, для чего платформу 6 спускают на воду (используя спускоподъемное устройство 3 судна-носителя 2). После чего обследуют предполагаемые пути подхода с использованием смонтированного на платформе комплекта аппаратуры 7-11, обеспечивающей освещение подводной обстановки по предполагаемому курсу подхода. В процессе обследования, используя навигационную аппаратуру 9, отслеживают реальную траекторию движения судна с фиксацией точек местоположения платформы 6, в каждый конкретный момент времени, «привязывая» к этим точкам полученные эхограммы. Это позволяет выявить подводные объекты, которые могут быть идентифицированы как предположительные мины, и определить координаты их местонахождения, которые по радиоканалу передаются на судно-носитель 2 и используются при прокладке его курса подхода к району разминирования.
При окончании процедуры позиционирования судна-носителя 2, оно становится на якорь или фиксируется на точке с использованием судовой системы динамического позиционирования. Далее, платформу 6 поднимают на борт судна-носителя 2, и с использованием его спускоподъемного устройства 3 размещают в камере 16 функциональный подводный аппарат 12. Затем свободный конец кабель-троса 21 (после точки его скрепления с кабельным барабаном 23) соединяют с кабельным разъемом 20 платформы 6 (при этом кабель-трос 21 почти полностью намотан на кабельный барабан 23 и с ним связаны как минимум три стропы, закрепленные на рым-болтах подводного аппарата, обеспечивающие его горизонтальное расположение (на чертежах не показаны). При этом створки 24 нижнего проема камеры 16 закрыты.
Далее, оснащенную описанным образом платформу 6 опускают с борта судна-носителя 2 на воду и начинают обследование выбранного участка района разминирования. Платформа 6 с высокой скоростью проходит параллельными галсами по выбранному участку района разминирования. Движители 13 управляются автоматически командами, поступающими по радиоканалу с бортового модуля 1.
В процессе обследования, используя навигационную аппаратуру 9 с борта судна носителя 2, отслеживают реальную траекторию движения судна с фиксацией точек местоположения платформы в каждый конкретный момент времени, «привязывая» к этим точкам полученные эхограммы. Это позволяет выявить подводные объекты, которые могут быть идентифицированы как предположительные мины, и определить координаты их местонахождения, которые по радиоканалу передаются на судно-носитель 2, и в случае невозможности точного определения статуса обнаруженных объектов система управления выдает координаты точек, где находятся выявленные объекты, которые необходимо обследовать дополнительно.
Интеграция системы управления комплексом с системой динамического позиционирования 15, которой вооружена платформа 6, обеспечивает ее переход в заданную точку, удержание в точке, противодействуя влиянию ветра и течения.
После выхода в заданную точку оператор с судна носителя 2 дает команду на удержание платформы 6 в этой точке, на раскрытие створок 24 у нижней кромки камеры 16 и спуск функционального подводного аппарата 12 (что отрабатывается за счет соответствующего вращения кабельного барабана 23 и сматывания с него кабель-троса 21).
Подводный аппарат 12, управляемый с судна-носителя 2 выходит к объекту осмотра, при этом оператор использует информацию о местоположениях платформы 6 и координатах обследуемого объекта, зафиксированных с платформы 6 в процессе предшествовавшего обследования. Включаются телекамера с прожектором, и изображение объекта уходит по кабель-тросу 21 на платформу 6 и далее по радиоканалу на судно-носитель 2. Если это не мина, то обследование прекращается и платформа 6 переходит к следующему объекту, где все повторяется.
Если это мина, то либо перерезается минреп, мина всплывает на поверхность, где ее расстреливают артиллерийско-стрелковыми средствами судна носителя 2, либо прикрепляют к ней дистанционно управляемое взрывное устройство и после удаления подводного аппарата осуществляют подрыв мины.
Далее все повторяется до полного разминирования всего района акватории.
Способ получения лигноцеллюлозного сорбента из плодовых оболочек подсолнечника
Установка для центробежного литья цилиндрических оболочек
Мармелад
Способ получения мармелада
Способ нагружения корпуса судна при проведении испытаний
7β-метил-3,17αβ-дисульфамоилокси-d-гомо-6-окса-эстра-1,3,5(10),8,14-пентаен в качестве ингибитора роста клеток рака молочной железы mcf-7
Беспроводное устройство для конъюнктивальной микроскопии
Способ приготовления вяленой рыбы
Сульфаматы 2-этил-6-оксаэстра-1,3,5(10),8,14-пентаенов в качестве ингибиторов пролиферации опухолевых клеток mcf-7
Устройство для закрепления тонкостенной нежесткой детали при обработке
Корпус судна
Корпус судна
Способ защиты судов от неконтактных магнитных мин
Способ посадки беспилотного вертолета на движущееся судно

