Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ УСТРОЙСТВ С РАБОЧИМ ИНСТРУМЕНТОМ И МОТОРИЗОВАННЫМ УСТРОЙСТВОМ ПОДАЧИ
Вид РИД
Изобретение
Область техники
Настоящее изобретение касается способа управления системой устройств с рабочим инструментом и моторизованным устройством подачи при обработке заготовки согласно ограничительной части п. 1 формулы изобретения
Уровень техники
Из европейской заявки ЕР 1693173 A1 известен способ управления системой устройств при разделении заготовки вдоль линии разделения. Система устройств состоит из направляющей рейки, пильной головки, расположенной на направляющей рейке с возможностью сдвига, и моторизованного механизма подачи для перемещения пильной головки вдоль направляющей рейки. Пильная головка включает в себя полотно пилы, которое закреплено на стойке пилы и приводится в движение вокруг оси вращения. Стойка пилы изготовлена с возможностью поворота вокруг оси качания. Движение наклона (поворота) стойки пилы вокруг оси качания изменяет глубину резки полотном пилы в заготовке. Вращение полотна пилы вокруг оси вращения осуществляют с помощью приводного двигателя, а движение наклона стойки пилы осуществляют с помощью двигателя поворота. Приводной двигатель и двигатель поворота расположены в корпусе для оборудования пильной головки. Моторизованное устройство подачи включает в себя направляющие салазки и двигатель подачи, который размещается в корпусе для оборудования пильной головки. Пильная головка установлена на направляющих салазках и выполнена с возможностью сдвига вдоль направляющей рейки в направлении подачи посредством двигателя подачи. В корпусе для оборудования, помимо двигателей, предусмотрено контрольное устройство для управления пильной головкой и моторизованным устройством подачи.
Известный способ управления системой устройств при разделении заготовки вдоль линии разделения содержит последовательность из трех этапов, которые выполняют друг за другом. На первом этапе способа стойку пилы наклоняют на некоторый угол наклона, который соответствует глубине резки для частичного разреза. На втором этапе способа пильную головку продвигают вдоль направляющей рейки вдоль направления подачи "туда" до первой конечной точки линии разделения. На третьем этапе способа пильную головку продвигают вдоль направляющей рейки вдоль направления подачи "обратно" до второй конечной точки линии разделения. Разделяющий разрез создают в несколько частичных разрезов. Три этапа способа повторяют до тех пор, пока не будет достигнута желаемая глубина резки разделяющего разреза.
При реализации известного способа управления системой устройств управляемого внедрения (вхождения) полотна пилы в подлежащую обработке заготовку не происходит. На первом этапе известного способа стойку пилы наклоняют под некоторым углом наклона, который соответствует глубине резки для первого частичного разреза. Недостаток состоит в том, что при вхождении полотна пилы может произойти сглаживание режущих сегментов. Из-за сглаживания режущих сегментов сокращаются срок службы режущих сегментов и скорость работы полотна пилы.
Сущность изобретения
Задача настоящего изобретения состоит в разработке способа управления системой устройств с полотном пилы, закрепленным на стойке пилы, при реализации которого вхождение полотна пилы в подлежащую обработке заготовку оптимизировано с точки зрения срока службы и скорости работы полотна пилы.
Эту задачу согласно изобретению решают с помощью упомянутого в начале способа управления системой устройств посредством признаков независимого пункта формулы изобретения. Предпочтительные усовершенствования представлены в зависимых пунктах формулы изобретения.
Согласно изобретению предусматривается, что во время движения подвода стойки пилы на врезание в заготовку контрольное устройство рассчитывает длину дуги полотна пилы, состоящей в зацеплении с заготовкой, и сравнивает рассчитанную длину дуги с предварительно заданной критической длиной дуги полотна пилы. Посредством расчета длины дуги полотна пилы, находящейся в зацеплении с заготовкой, можно контролировать способ согласно изобретению с точки зрения высокой скорости работы полотна пилы и длительного срока службы режущих сегментов. После старта вхождение полотна пилы осуществляется автоматически, без участия оператора. При этом способ можно начинать из разных положений, например из положения, в котором полотно пилы располагается над заготовкой или же из положения, в котором полотно пилы уже выполнило в заготовке предварительный надрез.
Полотна для настенных пил состоят из двух компонентов - из основного корпуса и режущих сегментов по образующей основного корпуса. Режущие сегменты состоят из матриксного материала, в который интегрированы частицы алмаза. Для высвобождения частиц алмаза при обработке требуется минимальное давление на единицу поверхности. Если давление на единицу поверхности оказывается ниже минимального значения, то частицы алмаза при работе полотном пилы не высвобождаются и существует опасность того, что разовьется сглаживание (полировка) режущих сегментов, что уменьшает срок службы режущих сегментов и скорость работы полотна пилы. Минимальное давление на единицу поверхности режущих сегментов соответствует критической длине дуги полотна пилы, которое нельзя превышать. Значение критической длины дуги полотна пилы зависит от множества параметров, в том числе от спецификации полотна пилы, материала подлежащей обработке заготовки, а также от мощности и крутящего момента двигателя, приводящего полотно пилы в движение.
В усовершенствованном варианте способа, если рассчитанная длина дуги соответствует критической длине дуги полотна пилы, движение подвода стойки пилы прерывается и осуществляется движение подачи полотна пилы в направлении "туда"(в прямом направлении) вдоль направления подачи. Благодаря движению подачи полотна пилы в направлении "туда" длина дуги полотна пилы, находящейся в зацеплении с заготовкой, уменьшается и падает ниже критического значения длины дуги. Контроль длины дуги во время движения подвода стойки пилы и движение подачи полотна пилы обеспечивают, что критическое значение длины дуги полотна пилы не превышается, а режущие сегменты обладают высоким сроком службы.
Особо предпочтительно, чтобы во время движения подачи полотна пилы контрольное устройство рассчитывало продвижение полотна пилы в направлении "туда", а рассчитанное продвижение полотна пилы сравнивалось бы с предварительно заданным первым продвижением. Полотно пилы высвобождается благодаря движению подачи в заготовке. Положение полотна пилы находится, например, под наблюдением датчика пути, и [эти данные] передают на контрольное устройство. Из положения полотна пилы контрольное устройство рассчитывает продвижение в направлении "туда".
В усовершенствованном варианте способа, если расчетное продвижение полотна пилы соответствует предварительно установленному первому продвижению, движение подачи полотна пилы прерывается и осуществляют еще одно движение подвода стойки пилы в заготовку. Когда полотно пилы благодаря продвижению в направлении "туда" высвобождается, длина дуги полотна пилы становится меньше критической длины дуги, и движение подвода стойки пилы можно продолжать.
Особо предпочтительно, чтобы во время второго движения подвода стойки пилы контрольное устройство рассчитывало длину дуги полотна пилы, находящейся в зацеплении с заготовкой, и сравнивало рассчитанную длину дуги полотна пилы с критическим значением длины дуги. Контроль длины дуги во время движения подвода стойки гарантирует, что критическое значение длины дуги полотна пилы не превышается, а режущие сегменты обладают высоким сроком службы.
В усовершенствованном варианте способа, если рассчитанная длина дуги соответствует критической длине дуги полотна пилы, еще одно движение подвода стойки пилы прерывается и осуществляется движение подачи полотна пилы в обратном направлении, противоположном направлению "туда", вдоль направления подачи. Благодаря движению подачи полотна пилы в направлении "обратно" длина дуги полотна пилы, находящейся в зацеплении с заготовкой, уменьшается и падает ниже критического значения длины дуги.
Особо предпочтительно, чтобы во время движения подачи полотна пилы контрольное устройство рассчитывало продвижение полотна пилы в направлении "обратно", а рассчитанное продвижение сравнивалось бы с предварительно заданным вторым продвижением. При этом предпочтительно прерывать движение подачи полотна пилы, когда рассчитанное продвижение полотна пилы соответствует второму продвижению. Когда полотно пилы благодаря продвижению в направлении "обратно" высвобождается, длина дуги полотна пилы становится меньше критической длины дуги, и движение подвода стойки пилы можно продолжать.
Движение подвода стойки пилы и движение подачи пильной головки вдоль направления подачи осуществляют попеременно до тех пор, пока вхождение полотна пилы не завершится и полотно пилы не достигнет желаемой глубины резания в заготовке.
Примеры исполнения
Ниже дано пояснение примеров исполнения изобретения на основании чертежа. Чертеж не обязательно отображает примеры исполнения строго масштабно, напротив, чертеж (там, где он служит пояснению) выполнен в схематическом и/или несколько искаженном виде. Что касается дополнений к положениям, непосредственно видимым из чертежа, то дана ссылка на соответствующий уровень техники. При этом следует учитывать, что возможны разнообразные модификации и изменения, касающиеся формы и подробностей формы исполнения, без отклонения от общей идеи изобретения. Признаки изобретения, изложенные в описании, в чертеже, а также в формуле изобретения, могут быть существенны для варианта исполнения изобретения как каждый по отдельности, так и в произвольном сочетании. Кроме того, изобретение охватывает все сочетания по меньшей мере двух признаков, изложенных в описании, чертеже и/или в формуле изобретения. Общая идея изобретения не ограничена точной формой или подробностями показанной и описанной ниже предпочтительной формы исполнения и не лимитирована объектом, который был бы более ограничен, чем заявленный в формуле изобретения объект. В случае указанных диапазонов параметров значения, лежащие в пределах названных границ, также следует считать изложением граничных значений, необходимо их произвольное применение и испрашивание. В целях простоты изложения ниже для идентичных или сходных деталей или же для деталей с идентичной или сходной функцией применяют одинаковые обозначения
Представлены:
ФИГ. 1 Система устройств на основании направляющих, состоящая из направляющей рейки, пильной головки, расположенной на направляющей рейке с возможностью сдвига, и моторизованного механизма подачи для перемещения пильной головки вдоль направляющей рейки; и
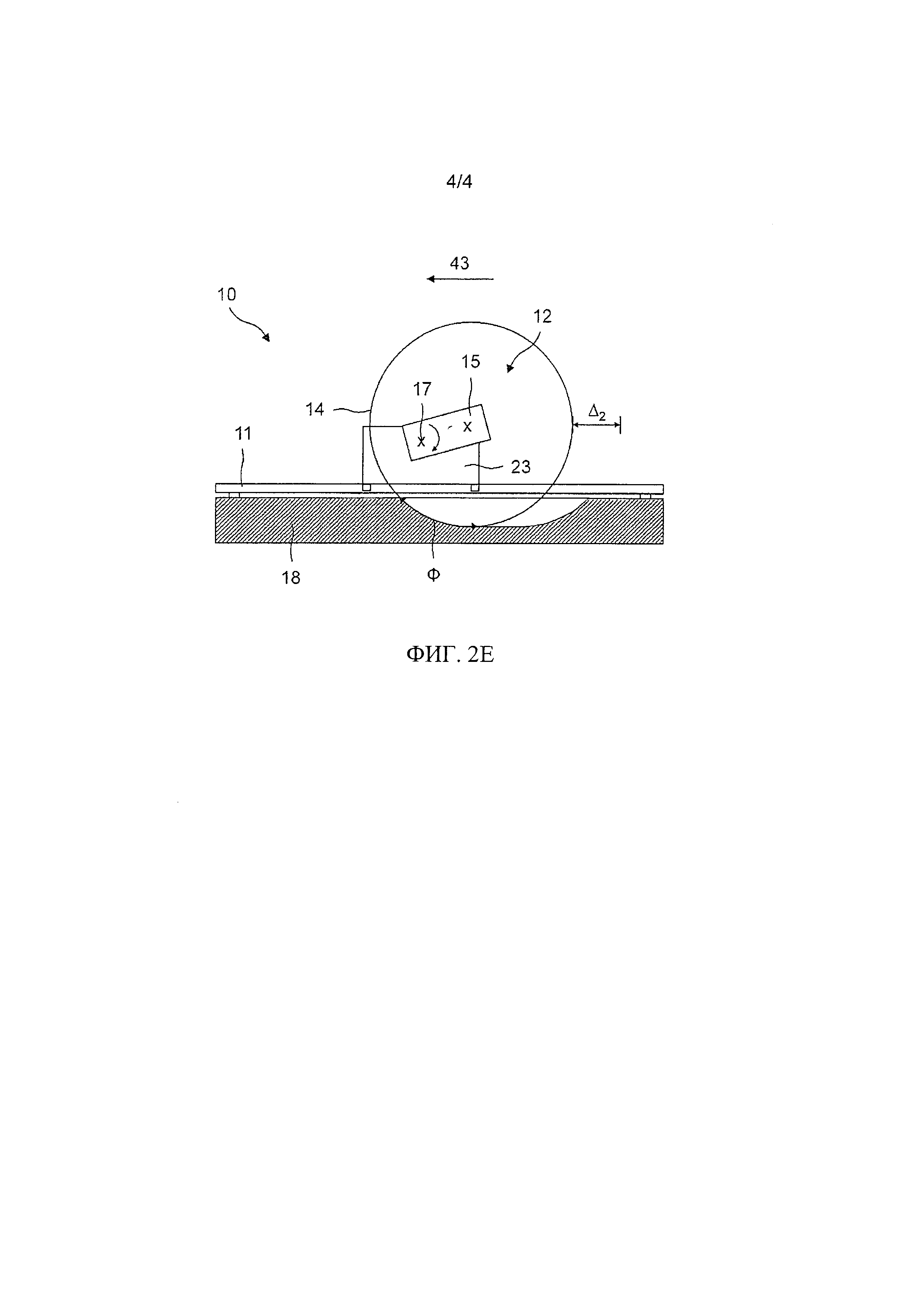
ФИГ. 2А-Е Пильная головка ФИГ. 1 с полотном пилы, которое закреплено на качающейся стойке пилы, в пяти различных положениях во время вхождения полотном пилы в подлежащую обработке заготовку.
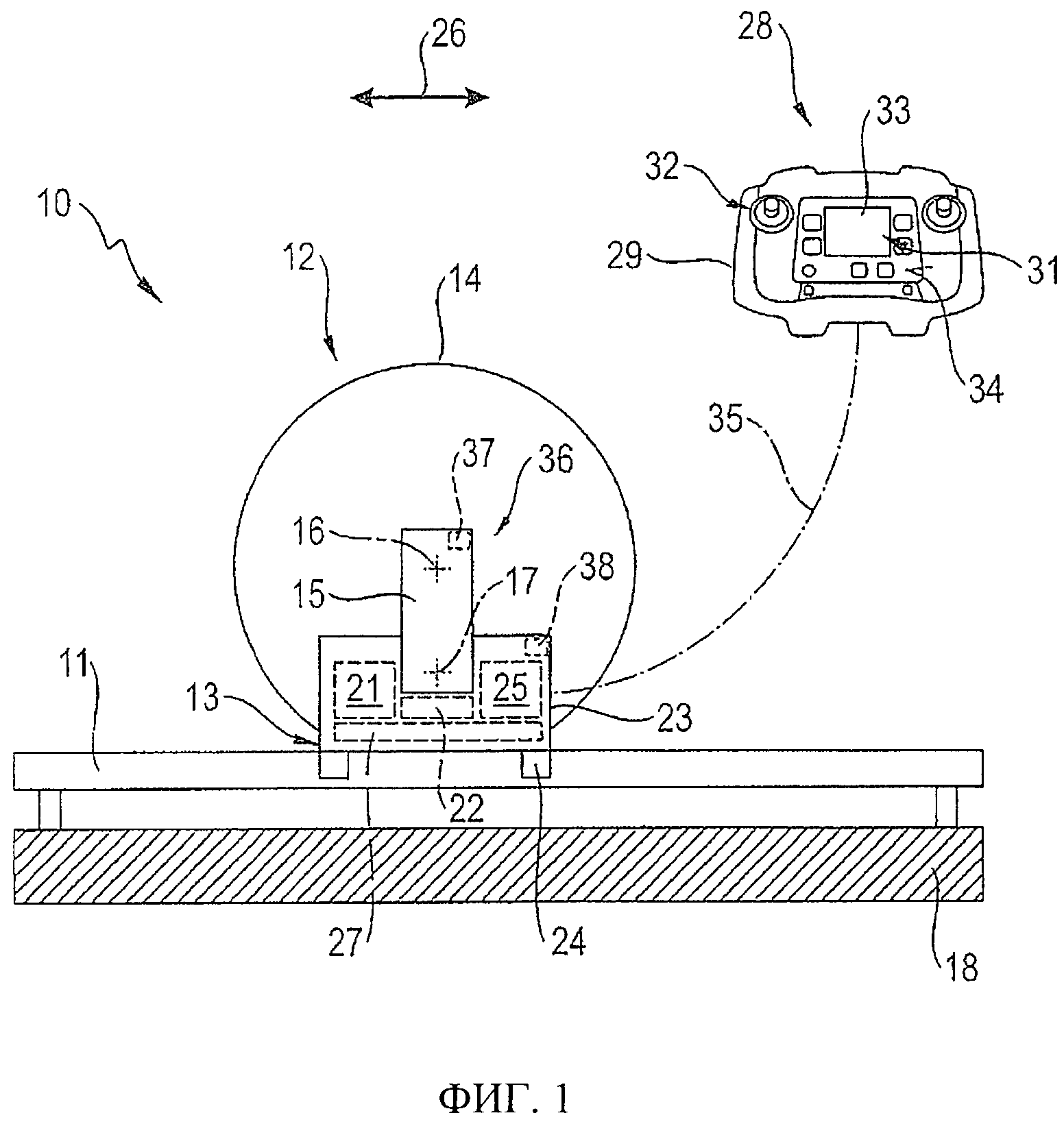
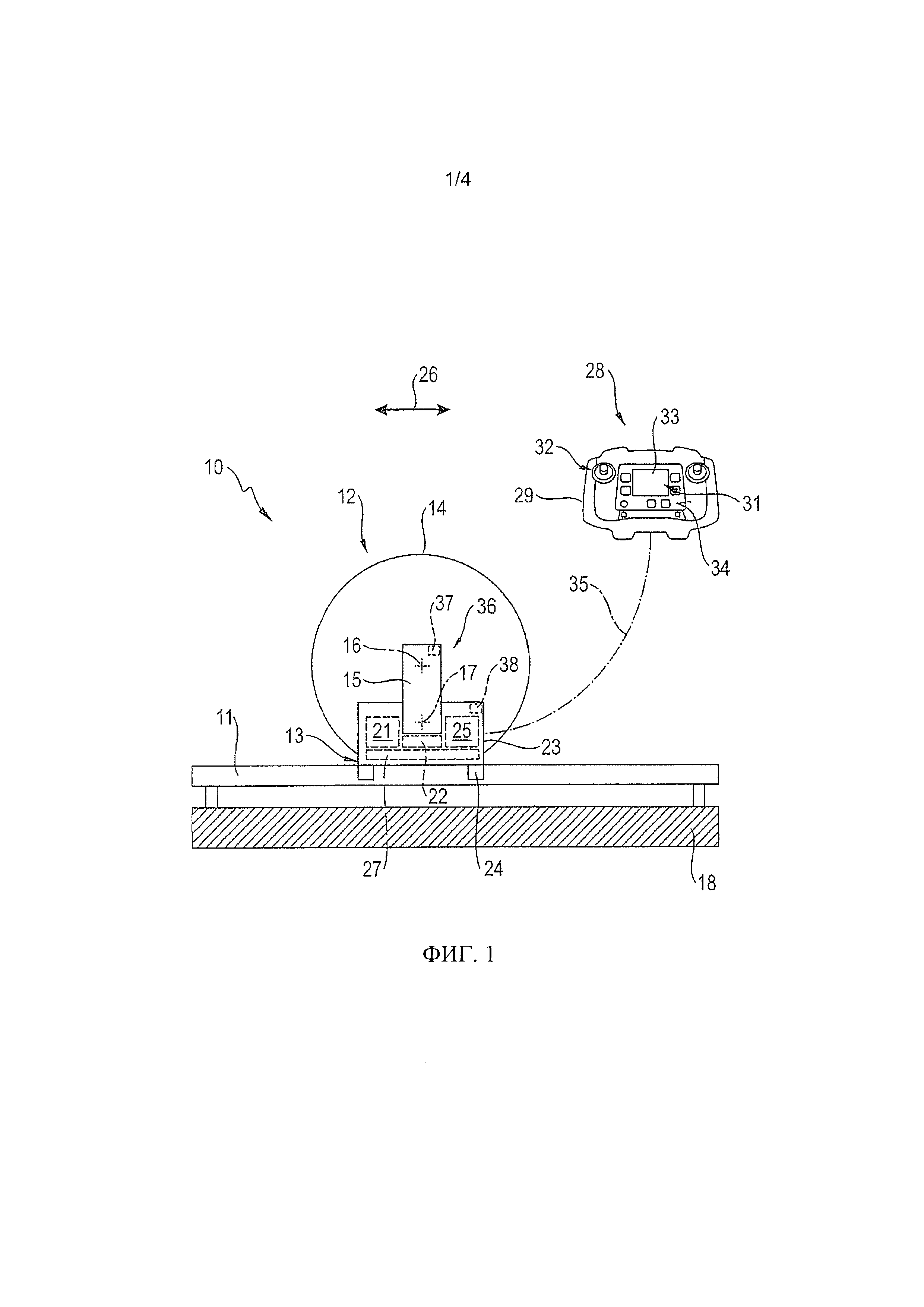
ФИГ. 1 демонстрирует схематическое изображение системы устройств 10 на основании направляющих, состоящей из направляющей рейки 11, расположенного на направляющей рейке 11 с возможностью сдвига рабочего инструмента 12 и моторизованного устройства подачи 13 для перемещения рабочего инструмента 12 вдоль направляющей рейки 11.
Рабочий инструмент выполнен в виде пильной головки 12 и включает в себя полотно пилы 14, которое закреплено на стойке пилы 15 и приводится в движение вокруг оси вращения 16. Стойка пилы 15 изготовлена с возможностью поворота вокруг оси качания. Движение наклона стойки пилы 15 вокруг оси качания 17 изменяет глубину резки полотном пилы 14. Угол наклона стойки пилы 15 с диаметром полотна пилы 14 определяет, насколько глубоко полотно пилы 14 погружается в подлежащую обработке заготовку 18. В качестве альтернативы движению наклона стойки пилы 15 вокруг оси качания 17 можно перемещать стойку пилы 15, например, с помощью линейного привода или другого приводного устройства. Внедрение (погружение) полотна пилы 14 в заготовку 18 вне зависимости от конструктивного исполнения приводного устройства обозначается как движение подвода стойки пилы 15. Для защиты оператора полотно пилы 14 может быть окружено защитным кожухом, который закрепляют на стойке пилы 15 с помощью держателя кожуха полотна 9.
Вращение полотна пилы 14 вокруг оси вращения 16 осуществляют с помощью приводного двигателя 21, а движение наклона стойки пилы 15 вокруг оси качания 17 осуществляют с помощью двигателя наклона 22. Приводной двигатель 21 и двигатель наклона 22 расположены в корпусе 23 для оборудования пильной головки 12. Моторизованное устройство подачи 13 включает в себя направляющие салазки 24 и двигатель подачи 25, который размещается в корпусе для оборудования 23. Пильная головка 12 закреплена на направляющих салазках 24 и выполнена с возможностью сдвига вдоль направляющей рейки 11 в направлении подачи 26 посредством двигателя подачи 25. В корпусе для оборудования 23, помимо двигателей 21, 22, 25, размещено контрольное устройство 27 для управления пильной головкой 12 и моторизованным устройством подачи 13. В первом контрольном устройстве 27 записан (сохранен) способ согласно изобретению для управления системой устройств 10 при введении полотна пилы 14 в подлежащую обработке заготовку 18.
Полотно пилы 14 для пильной головки 12 изготовлено из двух частей - основного корпуса и множества режущих сегментов, причем режущие сегменты размещены по окружности основного корпуса. Режущие сегменты выполнены из матриксного материала, в который интегрированы частицы алмаза. Для высвобождения частиц алмаза при обработке требуется минимальное давление на единицу поверхности. Если давление на единицу поверхности оказывается ниже минимального значения, то частицы алмаза при работе полотном пилы 14 не высвобождаются и существует опасность того, что разовьется сглаживание режущих сегментов, что уменьшает скорость работы полотна пилы 14 и срок службы режущих сегментов. Минимальное давление на единицу поверхности режущих сегментов соответствует критической длине дуги Φkrit полотна пилы 14. Поэтому длина дуги полотна пилы 14, находящейся в зацеплении с заготовкой 18, не должна превышать критическую длину дуги Φkrit. Значение критической длины дуги Φkrit полотна пилы 14 зависит от множества параметров, в том числе от спецификации полотна пилы 14, материала заготовки 18, мощности и крутящего момента приводного двигателя 21.
Управление системой устройств 10 осуществляют посредством управляющего устройства 28, которое в представленном варианте исполнения ФИГ. 1 выполнено как устройство дистанционного управления. Устройство дистанционного управления 28 включает в себя корпус устройства 29, расположенное в корпусе устройства 29 второе контрольное устройство 31, а также пульт управления 32 и индикаторное устройство 33, которые расположены на верхней стороне 34 корпуса устройства 29. Второе контрольное устройство 31 через коммуникационное соединение 35 соединено с первым контрольным устройством 27. Коммуникационное соединение 35 выполнено как кабельное соединение или как беспроводное коммуникационное соединение, например, в форме инфракрасного соединения, соединения Bluetooth, WLAN или Wi-Fi. Помимо указанных технологий беспроводного соединения для передачи данных годятся все уже известные и перспективные технологии беспроводного соединения.
Для наблюдения за системой устройств 10 и за процессом обработки у системы устройств 10 имеется сенсорное устройство 36 с несколькими сенсорными элементами (датчиками). Первый сенсорный элемент 37 выполнен как датчик угла наклона, а второй сенсорный элемент 38 - как датчик перемещения. Датчик угла наклона 37 измеряет мгновенный (текущий) угол наклона стойки пилы 15. Угол наклона стойки пилы 15 с диаметром полотна пилы 14 определяет, насколько глубоко полотно пилы 14 погружается в заготовку 18. Датчик перемещения 38 замеряет текущее положение пильной головки 12 на направляющей рейке 11. Результаты измерения с датчика угла наклона 37 и датчика перемещения 38 передаются на первое контрольное устройство 27.
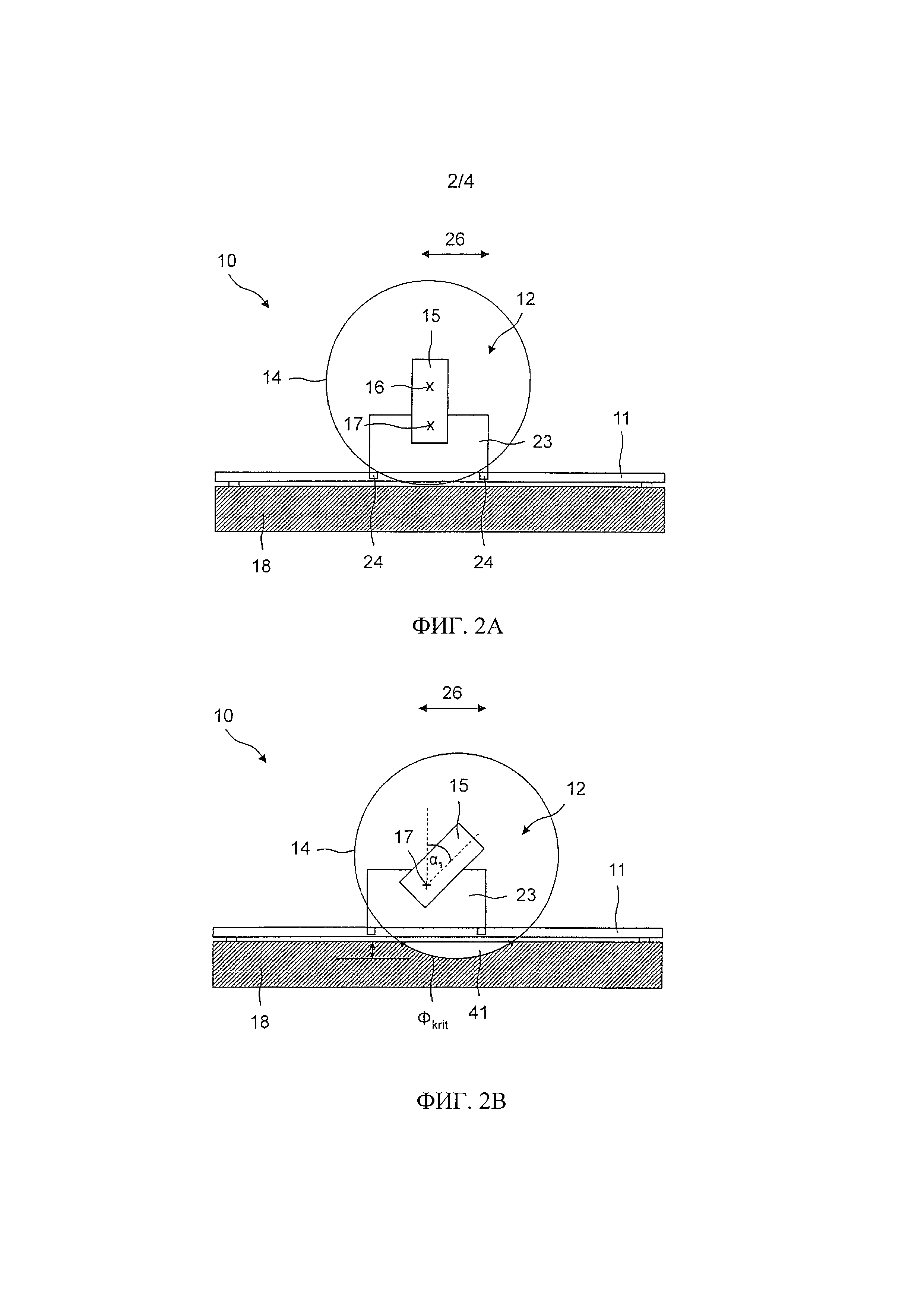
На ФИГ. 2А-Ε показаны пильная головка 12 и стойка пилы 15 со смонтированным полотном пилы 14 системы устройств 10 в пяти различных положениях во время введения полотна пилы 14 в подлежащую обработке заготовку 18. Введение осуществляют автоматически с помощью способа согласно изобретению для управления системой устройств при погружении полотна пилы в заготовку.
ФИГ. 2А демонстрирует пильную головку 12 и стойку пилы 15 со смонтированным полотном пилы в основном положении. В основном положении полотно пилы 14 расположено выше заготовки 18. Из основного положения полотно пилы 14 благодаря движению наклона стойки пилы 15 вокруг оси качания 17 движется внутрь заготовки 18. Во время движения наклона стойки пилы 15 полотно пилы 14 приводится в движение вокруг оси вращения 16 под воздействием приводного двигателя 21. Полотно пилы 14 формирует в заготовке 18 первый пропил 41 (ФИГ. 2В). Во время движения наклона стойки пилы 15 первое контрольное устройство рассчитывает длину дуги Φ полотна пилы 14, которая находится в зацеплении с заготовкой 18, и сравнивает с критической длиной дуги Φkrit. Длину дуги полотна пилы 14, находящуюся в зацеплении с заготовкой 18, можно рассчитать на основании диаметра полотна пилы 14, угла наклона стойки пилы 15 и положения пильной головки 12. Угол наклона стойки пилы 15 измеряется датчиком угла наклона 37, а положение пильной головки 12 измеряется датчиком пути 38. Как только длина дуги Φ полотна пилы 14 соответствует критической длине дуги Φkrit, движение наклона стойки пилы 15 прерывается. ФИГ. 2В демонстрирует стойку пилы 15 с полотном пилы 14 после первого движения наклона стойки пилы 15. Стойка пилы 15 наклонена под первым углом наклона α1.
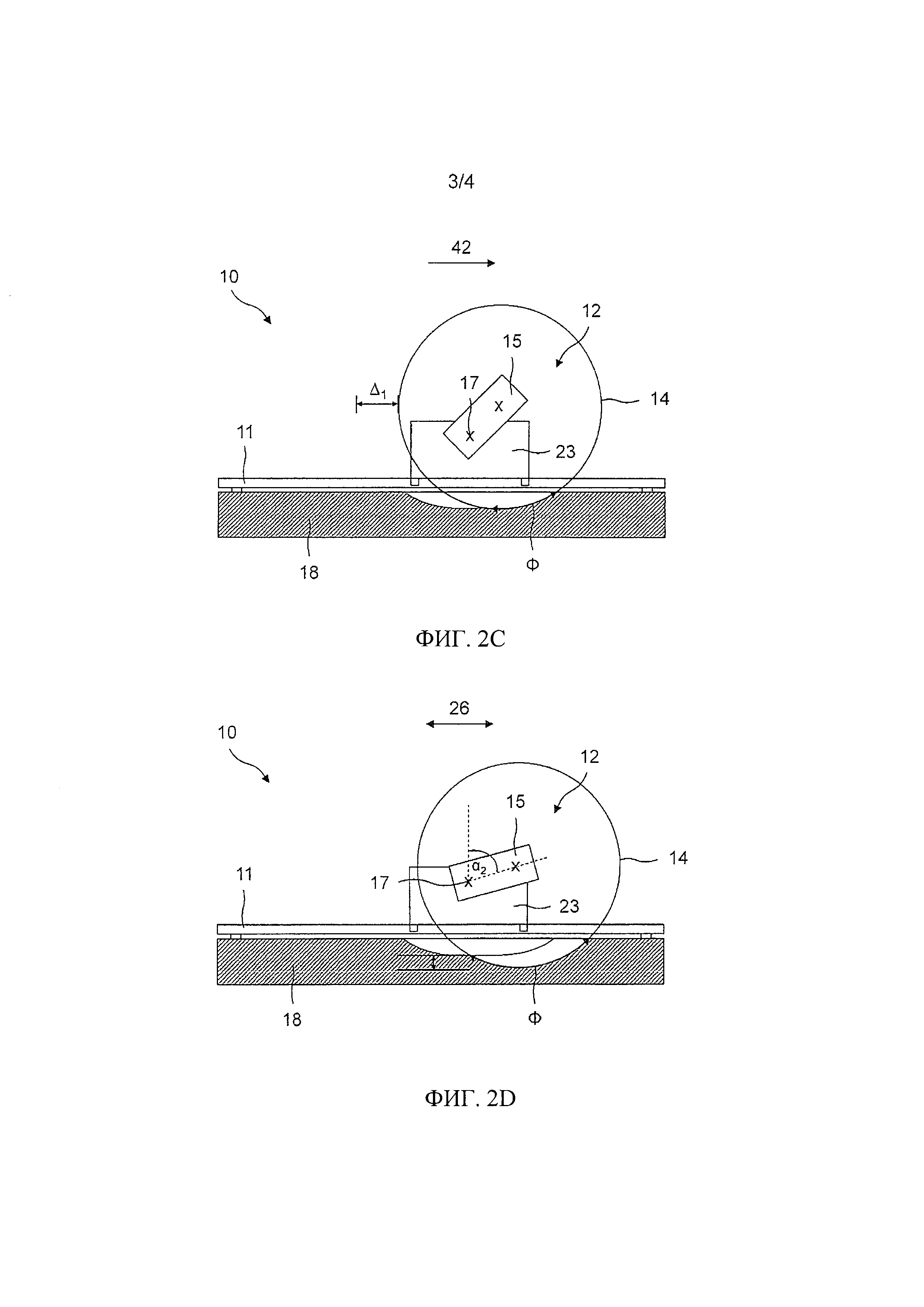
Пильная головка 12 с наклоненной стойкой пилы 15 перемещается под воздействием моторизованного устройства подачи 13 вдоль направления подачи 26 в направлении "туда" 42. При движении подачи длина дуги Φ полотна пилы 14, находящаяся в зацеплении с заготовкой 18, уменьшается и оказывается ниже критической длины дуги Φkrit. Во время движения подачи пильной головки 12 в направлении "туда" 42 датчик пути 38 контролирует положение пильной головки 12. Датчик пути 38 сообщает положение пильной головки 12 первому контрольному устройству 27, которое рассчитывает продвижение Δ. Как только пильная головка 12 перемещается на предварительно заданную первую величину продвижения Δ1 в прямом направлении 42, например от 1/10 до 3/20 диаметра полотна пилы 14, движение подачи пильной головки 12 в направлении "туда" 42 прерывается. ФИГ. 2С демонстрирует пильную головку 12 и стойку пилы 15 с полотном пилы 14 после первого движения подачи пильной головки 12. Стойка пилы 15 по-прежнему наклонена под первым углом наклона α1.
При неподвижной пильной головке 12 полотно пилы 14 из первого угла наклона α1 посредством движения наклона стойки пилы 15 вокруг оси качания 17 продвигается дальше в заготовку 18 (ФИГ. 2D). Во время движения наклона стойки пилы рассчитывают длину дуги Φ полотна пилы 14, находящейся в зацеплении с заготовкой 18, и сравнивают ее с критической длиной дуги Φkrit. Как только длина дуги Φ полотна пилы 14 соответствует критической длине дуги Φkrit, движение наклона стойки пилы 15 прерывается. ФИГ. 2D демонстрирует пильную головку 12 и стойку пилы 15 с полотном пилы 14 после второго движения наклона стойки пилы 15, которая наклонена под вторым углом наклона α2.
После второго движения наклона стойки пилы 15 полотно пилы 14 перемещается посредством моторизованного устройства подачи 13 в обратном направлении 43, противоположном направлению "туда" 42. При движении подачи длина дуги Φ полотна пилы 14, находящаяся в зацеплении с заготовкой 18, уменьшается и оказывается ниже критической длины дуги Φkrit. Во время движения подачи пильной головки 12 в обратном направлении 43 датчик пути 38 контролирует положение пильной головки 12. Как только пильная головка 12 перемещается на предварительно заданную вторую величину продвижения Δ2 в обратном направлении 43, например от 1/10 до 3/20 диаметра полотна пилы 14, движение подачи пильной головки 12 в направлении "обратно" 43 прерывается. ФИГ. 2Е демонстрирует пильную головку 12 и стойку пилы 15 с полотном пилы 14 после второго движения подачи пильной головки 12. Стойка пилы 15 по-прежнему наклонена под вторым углом наклона α2.
Первое продвижение Δ1 в прямом направлении 42 и второе продвижение Δ2 в обратном направлении 43 - это предварительно заданные величины, которые сохранены в первом контрольном устройстве 27. Величины Δ1, Δ2 выбраны таким образом, чтобы после движения подачи полотно пилы 14 высвобождалось, а находящаяся в зацеплении с заготовкой длина дуги Φ полотна пилы 14 была меньше, чем критическая длина дуги Φkrit. Как правило, первое и второе продвижение Δ1, Δ2 по модулю соответствуют друг другу и различаются лишь по направлению продвижения 42, 43. В результате такого исполнения полотно пилы 14 после второго движения подачи снова находится в стартовом положении в направлении подачи 26. Движение наклона стойки пилы 15 вокруг оси качания 17 и движение подачи пильной головки 12 вдоль направления подачи 26 осуществляют попеременно до тех пор, пока введение полотна пилы 14 не завершится и полотно пилы 14 не достигнет желаемой глубины резания в заготовке 18.
Режущая часть для сверлильной коронки
Применение многокомпонентной строительной растворной смеси на эпоксидноаминной основе
Забивающее устройство
Оптический узел с коническим зеркалом
Способ изготовления сплошного кольцевого сверла для колонковой сверлильной коронки
Способ крепления
Реакционноспособная смоляная композиция и ее применение
Смоляная смесь, строительный раствор из реактивной смолы, многокомпонентная система строительного раствора и их применение
Состав, образующий изолирующий слой, и его применение
Способ проверки свойств объекта в основе
Устройство для разделения заготовки вдоль линии разделения
Способ управления системой устройств при разделении заготовки вдоль линии разделения

