Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ
Вид РИД
Изобретение
Предлагаемое изобретение относится к навигации космического аппарата (КА) по сигналам навигационных спутников (НС), входящих в состав Глобальных Спутниковых Навигационных Систем (ГСНС), например, по сигналам НС ГЛОНАСС или GPS.
В настоящее время па многих КА установлена аппаратура спутниковой навигации (АСН), определяющая текущие координаты КА по сигналам НС, например, на американском сегменте Международной космической станции (АС МКС) установлена ACН SIGI, работающая по сигналам GPS, рассматриваемая в качестве аналога.
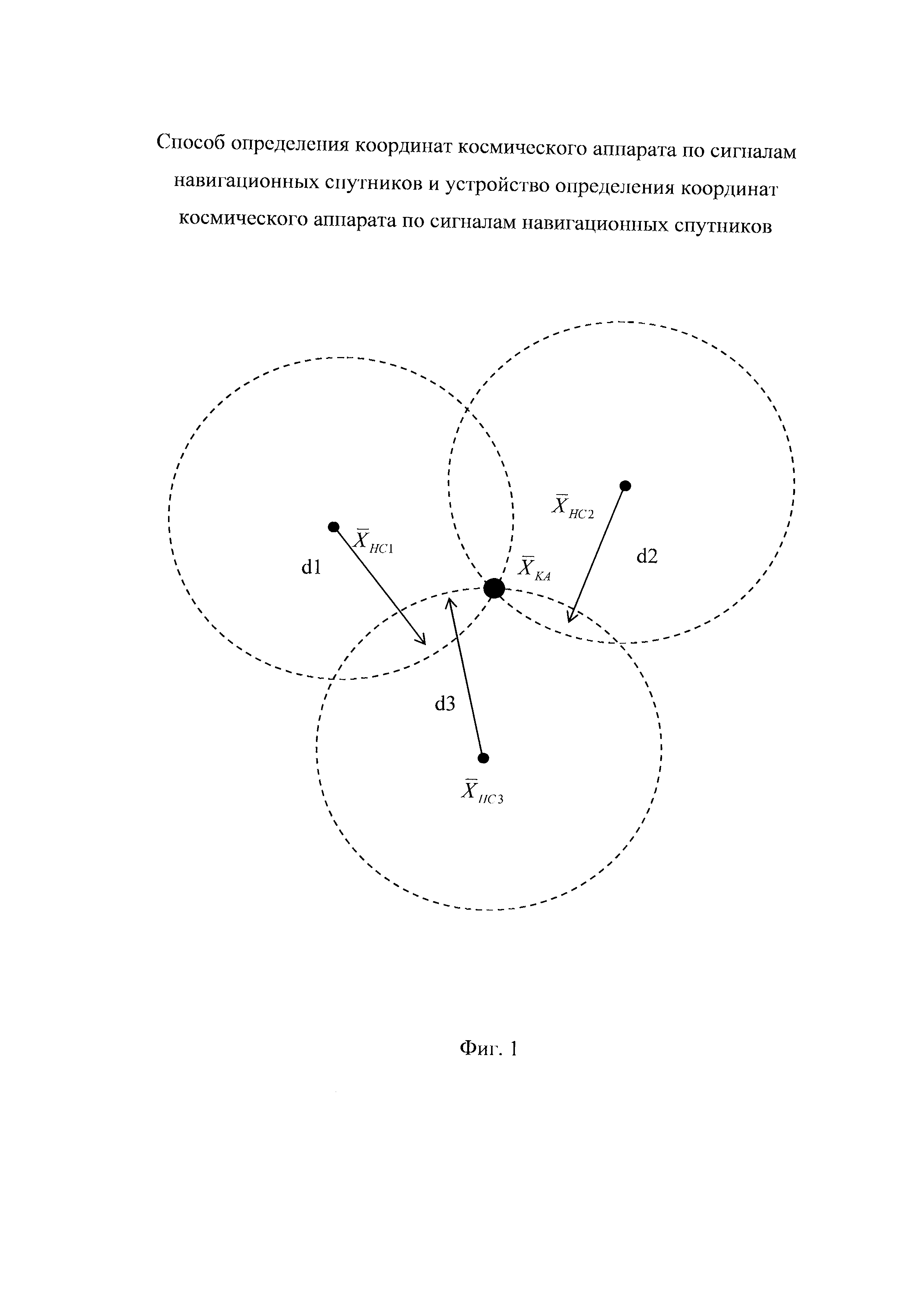
Известен способ - аналог определения координат КА по сигналам НС, включающий излучение радиосигналов от HC с известными параметрами орбиты в известные моменты времени, прием радиосигналов от n НС антеннами (Ан), установленными на КА, от HCi, находящихся в полях зрения соответствующих антенн, определение дальности между НСi и КA по разности времен приема и излучения радиосигнала, определение координат КА по измеренным дальностям di и координатам  HCi как координат точки, лежащей одновременно на n сферах радиуса di с центрами в точках (см. фиг. 1). Способ-аналог реализуется на АС МКС с помощью устройства ACH SIGI (см. фиг. 2), включающего четыре антенны 1.1, 1.2, 1.3, 1.4 для приема сигналов НС GPS, формирующих СВЧ-сигналы, передаваемые НС GPS, которые по СВЧ-кабелю поступают в блок формирования дальностей и координат НС (БФДК НС) 2.1, 2.2, 2.3, 2.4, формирующие на выходе сигналы дальностей di от КА до HC и сигналы координат HC (i-1… n, где n - число НС, сигналы которых принимает Ан), поступающие в блоки определения координат КА (БОК КА) 3.1, 3.2, 3.3, 3.4, определяющие по дальностям di и координатам НС сигналы вектора координат КА, являющиеся выходами устройства-аналога ACH SIGI (см. например, Н.В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политика, С-Петербург 2014, раздел 7.1)
HCi как координат точки, лежащей одновременно на n сферах радиуса di с центрами в точках (см. фиг. 1). Способ-аналог реализуется на АС МКС с помощью устройства ACH SIGI (см. фиг. 2), включающего четыре антенны 1.1, 1.2, 1.3, 1.4 для приема сигналов НС GPS, формирующих СВЧ-сигналы, передаваемые НС GPS, которые по СВЧ-кабелю поступают в блок формирования дальностей и координат НС (БФДК НС) 2.1, 2.2, 2.3, 2.4, формирующие на выходе сигналы дальностей di от КА до HC и сигналы координат HC (i-1… n, где n - число НС, сигналы которых принимает Ан), поступающие в блоки определения координат КА (БОК КА) 3.1, 3.2, 3.3, 3.4, определяющие по дальностям di и координатам НС сигналы вектора координат КА, являющиеся выходами устройства-аналога ACH SIGI (см. например, Н.В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политика, С-Петербург 2014, раздел 7.1)
Способ-аналог реализуется следующим образом. Для измерения дальности di формируемые НС сигналы промодулированы специальным модулирующим сигналом, позволяющим по текущей модуляции принятого сигнала определить момент времени излучения этого сигнала НС. Считая, для простоты, что часы НС и часы приемника сигнала абсолютно точные, определяют дальность от НС до КА по формуле:

где  - время приема i-го сигнала;
- время приема i-го сигнала;
tui - время излучения сигнала i-го НС;
с - скорость света.
Для определения координат НС в любой требуемый момент времени в структуру сигнала НС закладывается так называемый сигнал данных, содержащий необходимую потребительскую информацию для решения навигационной задачи, в том числе и данные об эфемеридах НС. Эфемериды НС - это набор параметров, позволяющих вычислить координаты НС на любой момент времени. Например, для НС ГЛОНАСС эфемериды включают [1]:
toe - опорное время эфемерид;
 - координаты НС в момент toe;
- координаты НС в момент toe;
 - скорость НС в момент toe.
- скорость НС в момент toe.
В навигационном приемнике в процессе обработки принятого от НС сигнала выделяются массивы данных, в том числе и массив эфемерид НС. Определение вектора координат НС в момент tП осуществляется путем интегрирования уравнений движения НС ГЛОНАСС от момента toe, для которого известен вектор состояния , , до момента tП. В простейшем случае, если toe-tП мало (например, меньше 1 с), то интегрирование может быть выполнено по формуле:

где  - известный вектор ускорения НС в точке
- известный вектор ускорения НС в точке  [1].
[1].
Аналогичные действия выполняются для всех НС, сигналы которых попадают в поле зрения антенн. В результате формируется массив di, , где i=1…n, n - число НС, видимых антенными. По значениям di и определяют  . В плоском случае определение координат иллюстрирует фиг. 1, на которой вектор является общей точкой пересечения всех n окружностей радиуса di с центрами в точках .
. В плоском случае определение координат иллюстрирует фиг. 1, на которой вектор является общей точкой пересечения всех n окружностей радиуса di с центрами в точках .
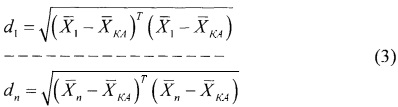
В пространственном случае координаты определяются как решение системы n нелинейных уравнений:
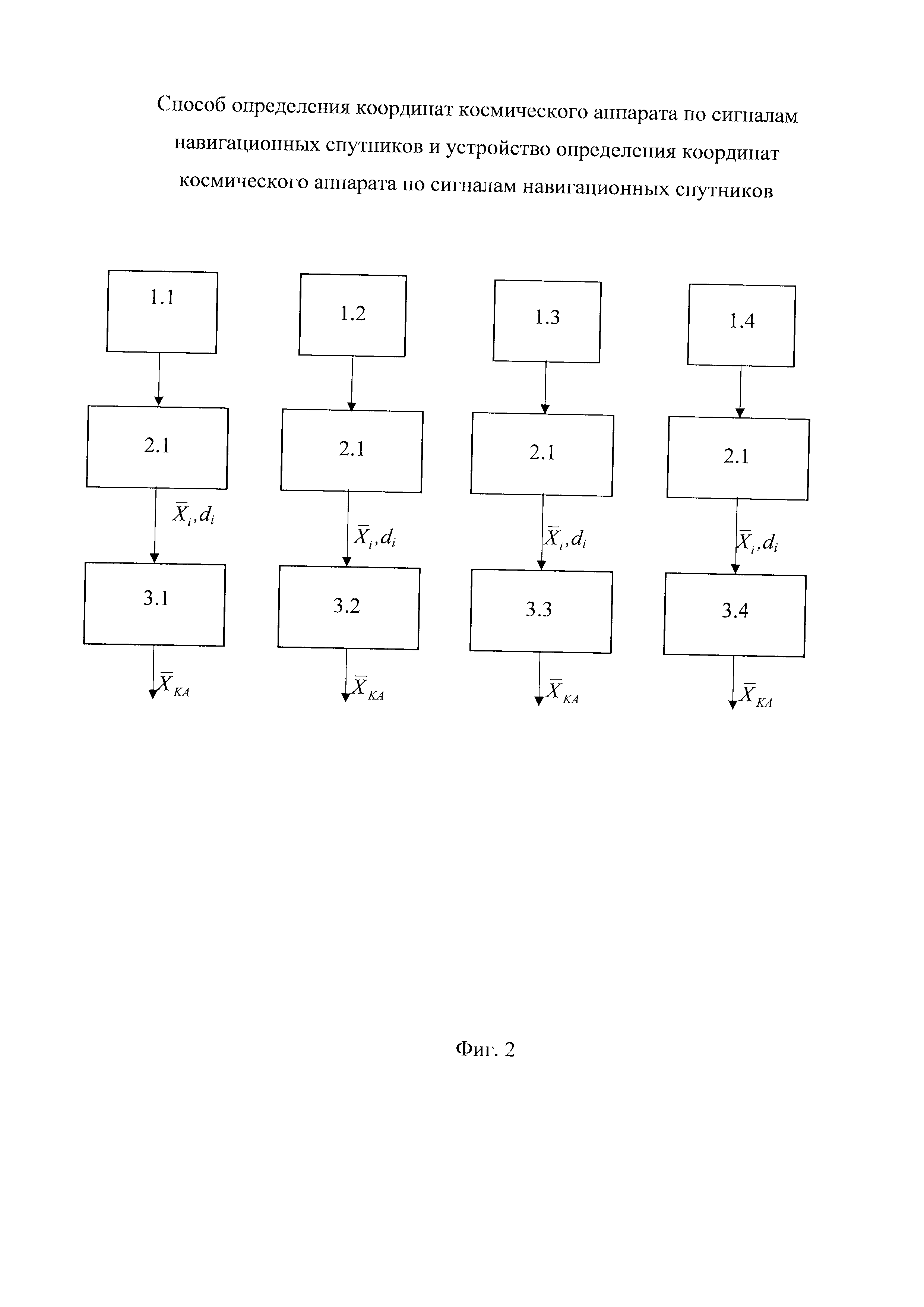
Блок-схема устройства-аналога, иллюстрирующая его работу, приведена на фиг. 2.
Устройство-аналог включает:
- четыре антенны (Ан), установленных на поверхности КА 1.1-1.4;
- четыре блока формирования дальностей и координат (БФДК) 2.1-2.4 НС, на входы которых поступают СВЧ-сигналы от соответствующих антенн, а на выходах формируются сигналы дальностей di от КА до i-го НС и координат i-го НС;
- четыре блока определения координат (БОК) 3.1-3.4 КА, на входы которых поступают сигналы di и от соответствующих УФДК НС, а на выходах формируются сигналы
Аппаратура БФДК НС представляет собой так называемые корреляторы, выпускаемые во всем мире миллионными тиражами и обеспечивающими первичную обработку сигналов НС. Они производят первичные измерения, в том числе, измерения дальности и дешифровку информационных сигналов, в том числе, эфемерид, формируя векторы .
БОК КА аппаратно представляет собой процессор, формирующий по векторам координат НС, например, по алгоритму (2), вектор путем решения системы (3).
Система SIGI АС МКС включает четыре одинаковых контура Ан-БФДК НС-БОК КА, так как антенны сильно затенены элементами конструкции МКС, и в зависимости от ориентации МКС, ориентации солнечных батарей и тепловых радиаторов станции, от положения НС на небесной сфере в поле зрения антенн могут попадать разное количество НС, в результате на выходах БОК КА формируются разные векторы . В бортовой вычислительной системе (БВС) МКС значения векторов проходят специальную обработку, результатом которой является гарантированное формирование осредненного вектора .
Недостатком аналога является то, что оси визирования всех антенн SIGI параллельны друг другу и их суммарное поле зрения равно полю зрения одной антенны. Поэтому с точки зрения рассматриваемого способа и системы, реализующей этот способ, наличие четырех контуров формирования вектора равносильны работе одного контура, так как все остальные контуры в точности повторяют работу первого контура. Однако ситуация меняется, когда антенны, установленные на внешней поверхности КА, направлены в различных направлениях. В этом случае в их поле зрения попадают разные НС и разное их количество, что существенно влияет на работу системы и ее качество. Например, антенны АСН-М Российского сегмента МКС имеют разные направления, что дает ей существенные функциональные преимущества при угловых маневрах, когда из всех антенн с разным числом видимых НС можно выбрать антенну с максимальным числом НС. Способ определения координат КА по сигналам НС и устройство определения координат КА по сигналам НС, реализующее этот способ в АСН-М, рассматриваются в качестве прототипа.
Способ-прототип определения координат КА по сигналам НС включает измерение дальностей dij от КА до НСij с известными параметрами орбиты объединенных в одну j-ю группу, попадающую в поле зрения антенны с максимальным числом НС, по разности времен приема и излучения радиосигнала определение координат  по измеренным дальностям dij и координатам
по измеренным дальностям dij и координатам  НС, как координат точки, лежащей одновременно на n сферах радиуса di с центрами в точках . (См. например, В.Н. Бранец, Е.А. Микрин, В.Н. Платонов, С.Н. Евдокимов, М.В. Михайлов, С.Н. Рожков, Р.Ф. Муртазин, Б.В. Шебшаевич, В. Пантер, Дж. Клабб «Навигационное обеспечение международной космической станции» Сборник трудов X Санкт-Петербургской международной конференции по интегрированным навигационным системам 2003, стр. 7).
НС, как координат точки, лежащей одновременно на n сферах радиуса di с центрами в точках . (См. например, В.Н. Бранец, Е.А. Микрин, В.Н. Платонов, С.Н. Евдокимов, М.В. Михайлов, С.Н. Рожков, Р.Ф. Муртазин, Б.В. Шебшаевич, В. Пантер, Дж. Клабб «Навигационное обеспечение международной космической станции» Сборник трудов X Санкт-Петербургской международной конференции по интегрированным навигационным системам 2003, стр. 7).
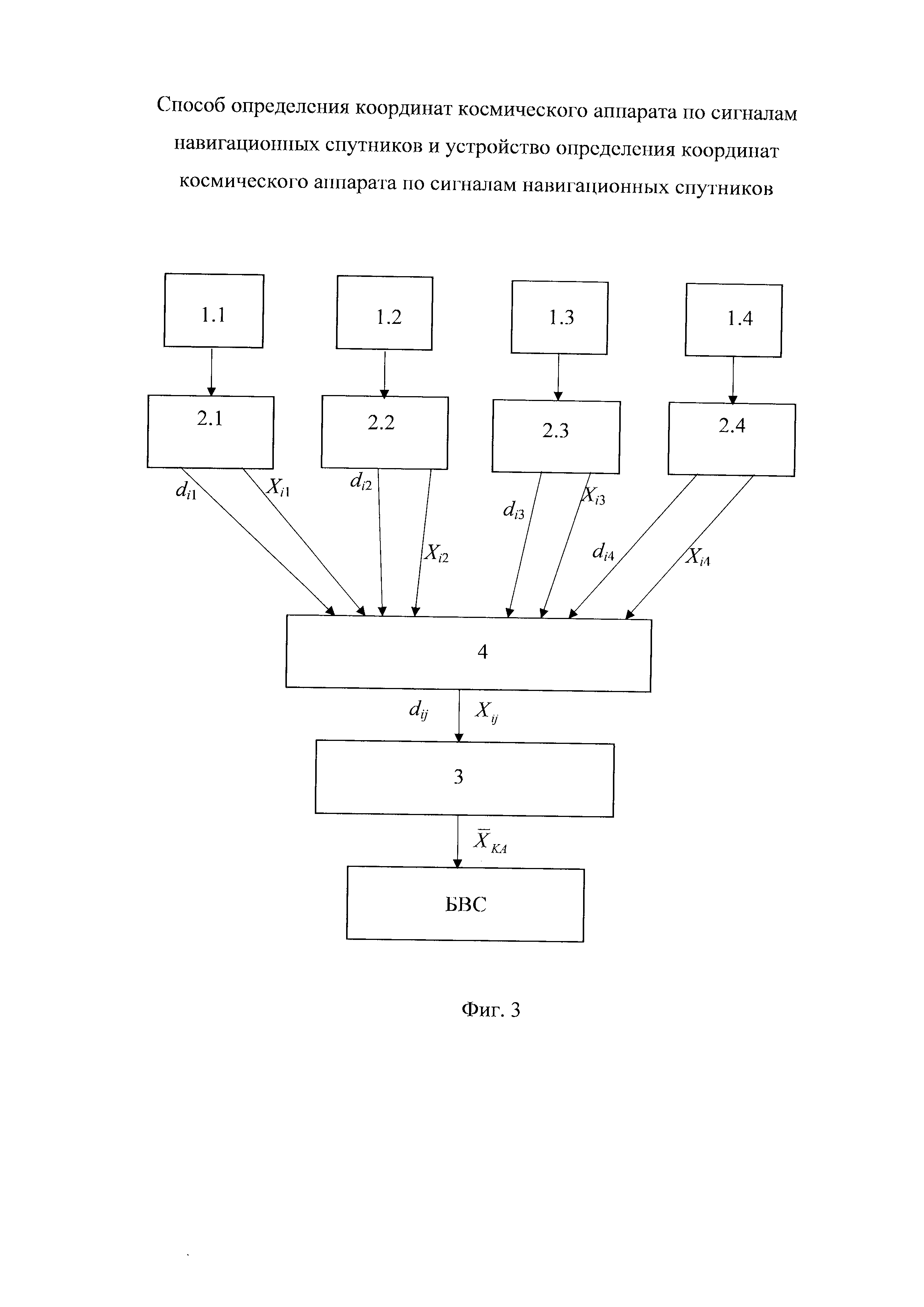
Устройство определения координат КА по сигналам НС, реализующее рассмотренный выше способ и принятое авторами в качестве прототипа включает m Анj приема сигналов НС, формирующих СВЧ-сигналы, передаваемые НС по СВЧ-кабелям в m соответствующих БФДК НСj, формирующих на выходе сигналы дальностей dij от Aнj до НСij и координат НСj, поступающие в устройство выбора ведущей антенны (УВВА), определяющее Анj с максимальным числом видимых НС, передающую измерения dij и Хij от этого Ан в БОК КА, определяющее координаты КА по измерениям антенны с максимальным числом видимых НС. (См. например, B.Н. Бранец, Е.А. Микрин, В.Н. Платонов, С.Н. Евдокимов, М.В. Михайлов, C.Н. Рожков, Р.Ф. Муртазин, Б.В. Шебшаевич, В. Пантер, Дж. Клабб «Навигационное обеспечение международной космической станции» Сборник трудов X Санкт-Петербургской международной конференции по интегрированным навигационным системам 2003, стр. 7).
Блок-схема устройства-прототипа, приведенная на фиг. 3, включает:
- четыре Ан 1.1, 1.2, 1.3, 1.4, установленных на поверхности КА;
- четыре БФДК НС 2.1, 2.2, 2.3, 2.4, на входы которых поступают СВЧ-сигналы от соответствующих Ан, а на выходах формируются сигналы дальностей dij от j-й Ан до НСij и координат i-го НС;
- УВВА 4, определяющее по числу измерений dij номер Ан с максимальным числом видимых НС и передающее данные, полученные от соответствующего БФДК (2), в БОК (3) КА;
- БОК 3 КА определяет координаты  КА по измерениям от Ан с максимальным числом НС. Выход БОК 3 является выходом устройства-прототипа.
КА по измерениям от Ан с максимальным числом НС. Выход БОК 3 является выходом устройства-прототипа.
Аппаратно Ан прототипа аналогичны Ан аналога, БФДК НС прототипа аналогичен БФДК НС аналога.
УВВА представляет собой логическое устройство, определяющее по размерности передаваемого массива измерений dij номер Анj, для которого эта размерность максимальна, и передающее в БОК КА данные от БФДК НС, соответствующего этим Ан.
БОК КА прототипа аналогичен БОК КА аналога.
Недостатком прототипа является невозможность осуществлять измерения орбиты при угловых маневрах КА из-за уменьшения числа видимых НС в поле зрения каждой отдельной Ан, низкая точность измерений из-за уменьшения числа видимых НС и отклонений координат антенн АСН от центра масс (ЦМ) КА.
Отмеченные недостатки способа и устройства прототипа обусловлены малым числом НС, попадающим в поле зрения каждой из Ан. Это количество НС существенно зависит от углового положения КА. Например, на Российском сегменте МКС поле зрения одной из Ан при орбитальной ориентации МКС направлено в зенит. В этом случае в поле зрения обычно одновременно попадает от семи до двенадцати НС GPS, но при развороте, например, по крену на 90° число видимых НС сокращается до трех. При таком числе НС одномоментное определение координат МКС либо невозможно, либо осуществляется с большой ошибкой. Но на МКС имеются и другие Ан, развернутые на ~35° по крену относительно зенитной антенны. В поле зрения этой антенны при развороте МКС па 90° будут попадать от четырех до восьми НС. В прототипе в такой ситуации определение орбиты будет выполняться по НС, попадающим в поле зрения этой Ан. При указанном числе НС вектор координат МКС может определяться по одномоментным измерениям, хотя и с меньшей точностью, чем в случае направления Ан в зенит. При большем угле разворота МКС по крену в поле зрения каждой из антенн будет попадать недостаточное число НС для определения вектора координат МКС. Кроме того, при переходе к измерениям от другой антенны меняются координаты Ан. А в прототипе измеряемыми координатами КА являются координаты Ан, формирующего измерения, а не координаты центра масс КА, которые, вообще говоря, и являются координатами КА, так как во всех баллистических расчетах определяется именно движение центра масс КА. Несовпадение координат Ан с координатами центра масс КА вносит дополнительную ошибку в решение навигационной задачи.
Технический результат заключается в повышении точности определения координат КА при произвольном угловом маневрировании КА за счет увеличения количества измерений от навигационных спутников за счет использования для определения координат КА сигналов всех НС, попадающих в поля зрения всех антенн, а также за счет приведения измерений от координат нескольких антенн к одной общей координате, совпадающей с центром масс КА.
Технический результат достигается тем, что в способе определения координат КА по сигналам навигационных спутников, включающем излучение радиосигналов от навигационных спутников с известными параметрами орбиты в известные моменты времени, прием радиосигналов от навигационных спутников антеннами, установленными на космическом аппарате, от i навигационных спутников, находящихся в полях зрения соответствующих антенн, определение дальности di между i навигационными спутниками и космическим аппаратом по разности времени приема и излучения радиосигнала, определение координат космического аппарата по измеренным дальностям и координатам  навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках , в отличие от известного, определяют векторы от центра масс космического аппарата до антенн в связанной с космическим аппаратом системе координат, определяют ориентацию космического аппарата в гринвичской системе координат, определяют векторы от центра масс космического аппарата до антенн в гринвичской системе координат, определяют проекции этих векторов на направления от космического аппарата на навигационные спутники, суммируют эти проекции с измеренными дальностями соответствующих антенн, по полученным суммам определяют координаты космического аппарата.
навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках , в отличие от известного, определяют векторы от центра масс космического аппарата до антенн в связанной с космическим аппаратом системе координат, определяют ориентацию космического аппарата в гринвичской системе координат, определяют векторы от центра масс космического аппарата до антенн в гринвичской системе координат, определяют проекции этих векторов на направления от космического аппарата на навигационные спутники, суммируют эти проекции с измеренными дальностями соответствующих антенн, по полученным суммам определяют координаты космического аппарата.
Технический результат достигается тем, что в устройство определения координат космического аппарата по сигналам навигационных спутников, включающее m антенн, выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат навигационных спутников, а также блок определения координат космического аппарата, в отличие от известного, дополнительно введены блок ориентации и задатчик координат антенн, выходы которых подключены к соответствующим входам преобразователя координат антенн, выходы которого подключены к первым входам формирователя поправок дальностей, ко вторым входам которого подключены первые выходы блоков формирования дальностей и координат навигационных спутников, выходы формирователей поправок дальностей подключены к входам m сумматоров, ко вторым входам которых подключены вторые выходы блоков формирования дальностей и координат навигационных спутников, выходы сумматоров подключены к первым входам блока определения координат космического аппарата, ко вторым входам которого подключены первые выходы блоков формирования дальностей и координат навигационных спутников, выход блока определения координат космического аппарата является выходом заявляемого устройства.
Суть изобретения поясняется графическими материалами, на которых приведены:
на фиг. 1 - графическая интерпретация решения задачи навигации по измеренным дальностям di и координатам навигационных спутников ;
на фиг. 2 - блок схема устройства аналога;
на фиг. 3 - блок-схема устройства-прототипа;
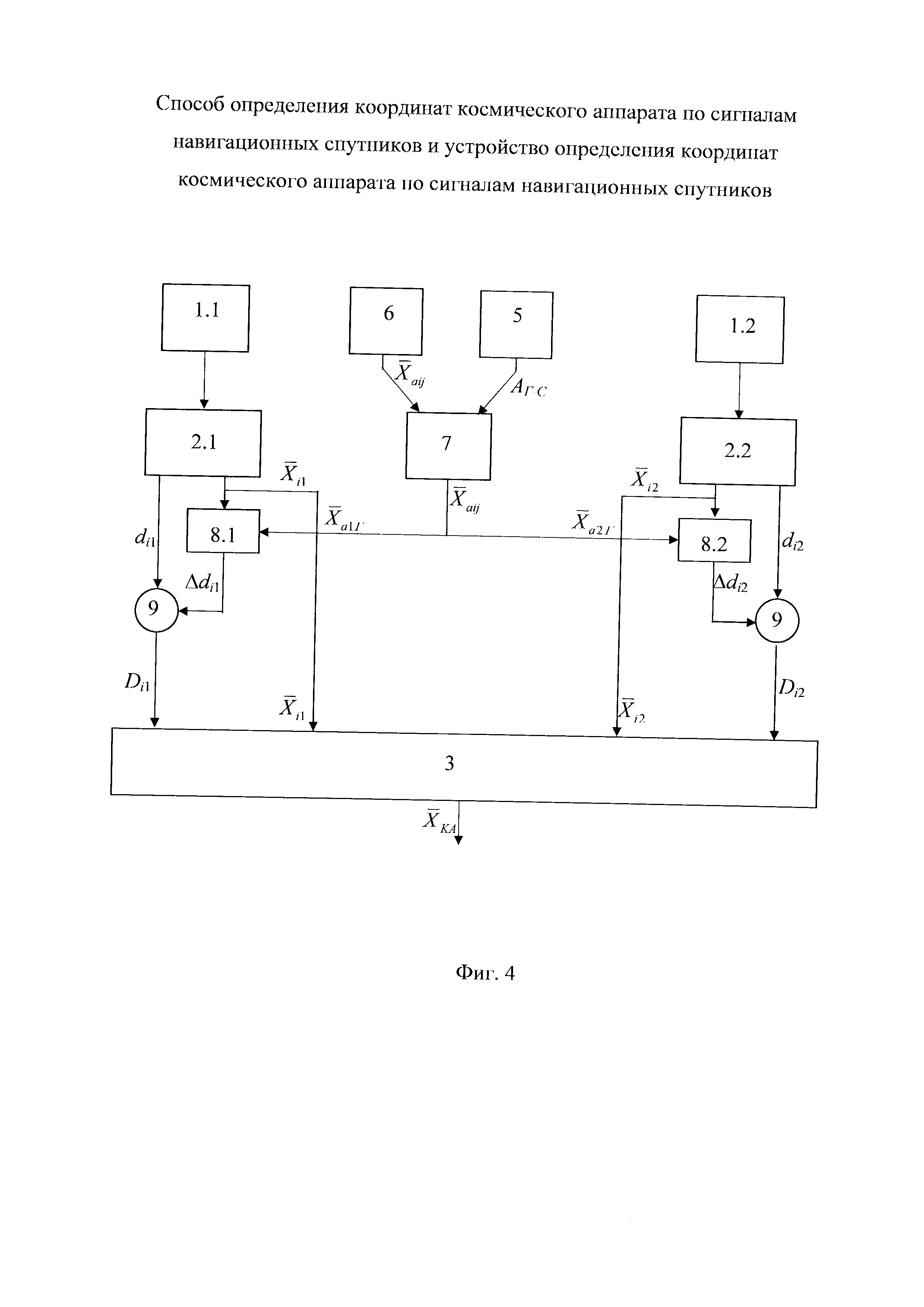
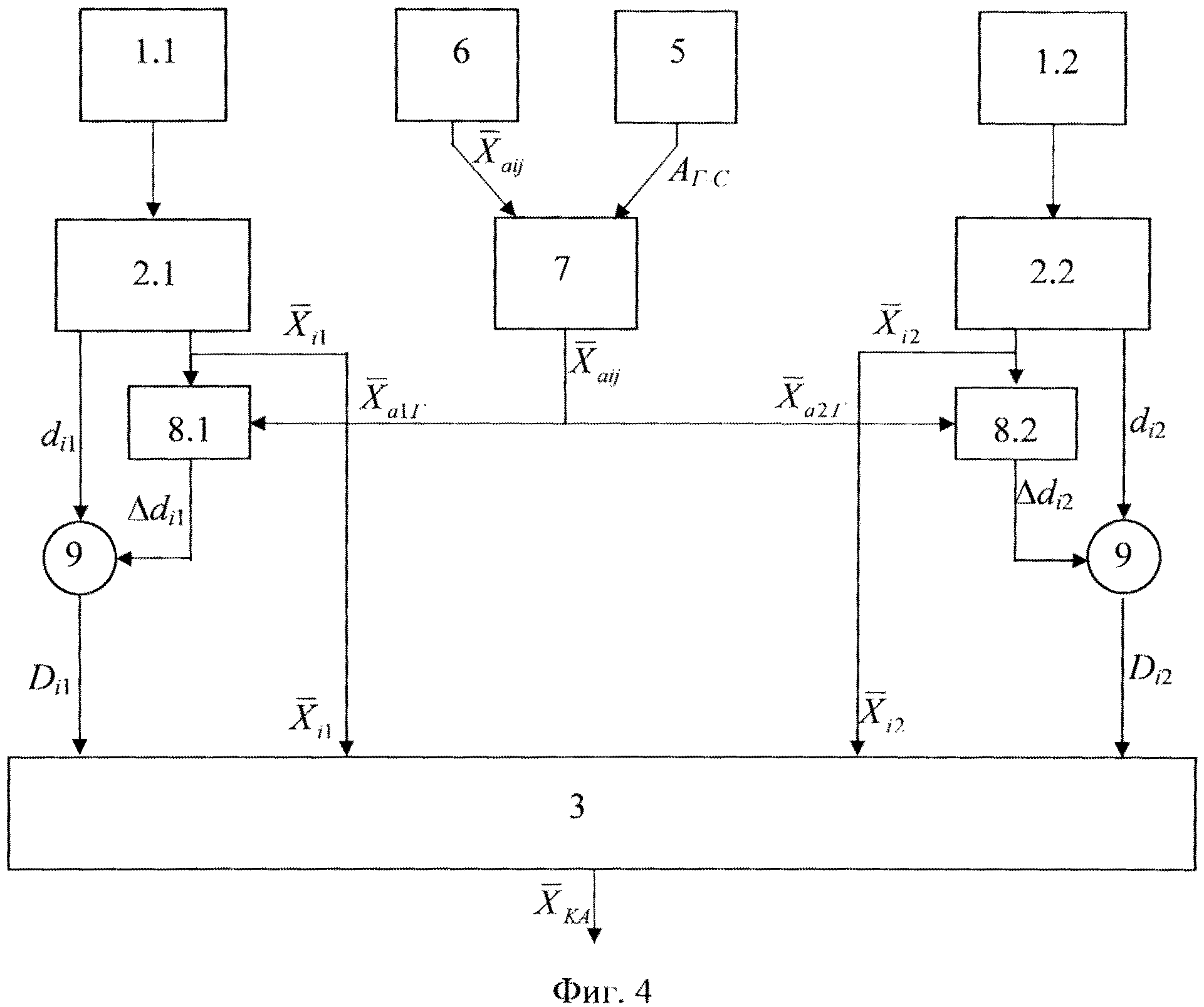
на фиг. 4 - блок схема предлагаемого устройства;
на фиг. 5 - геометрическая интерпретация предлагаемого способа;
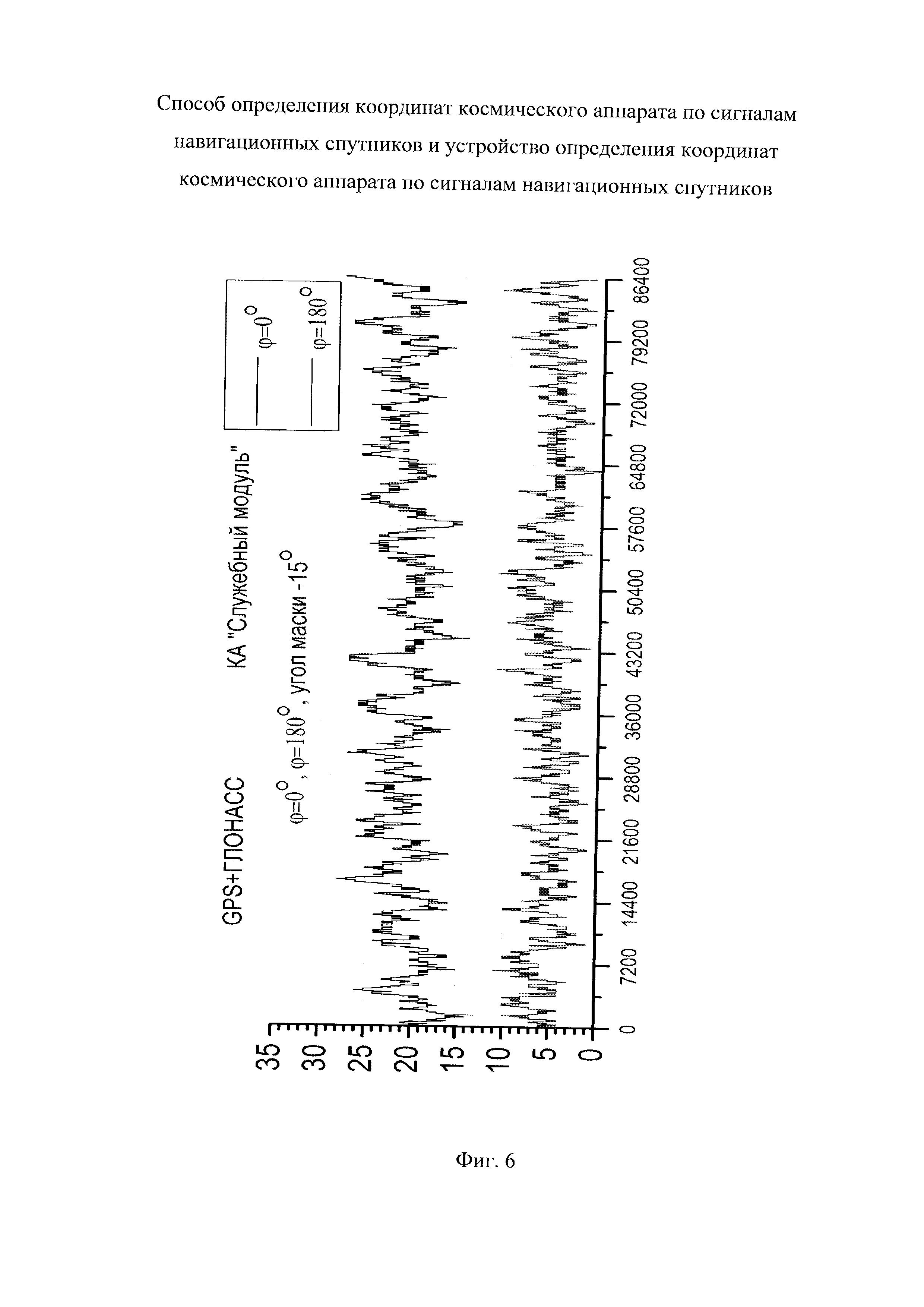
на фиг. 6 - графики максимальной и минимальной видимости навигационных спутников при различной ориентации КА для предложенного решения;
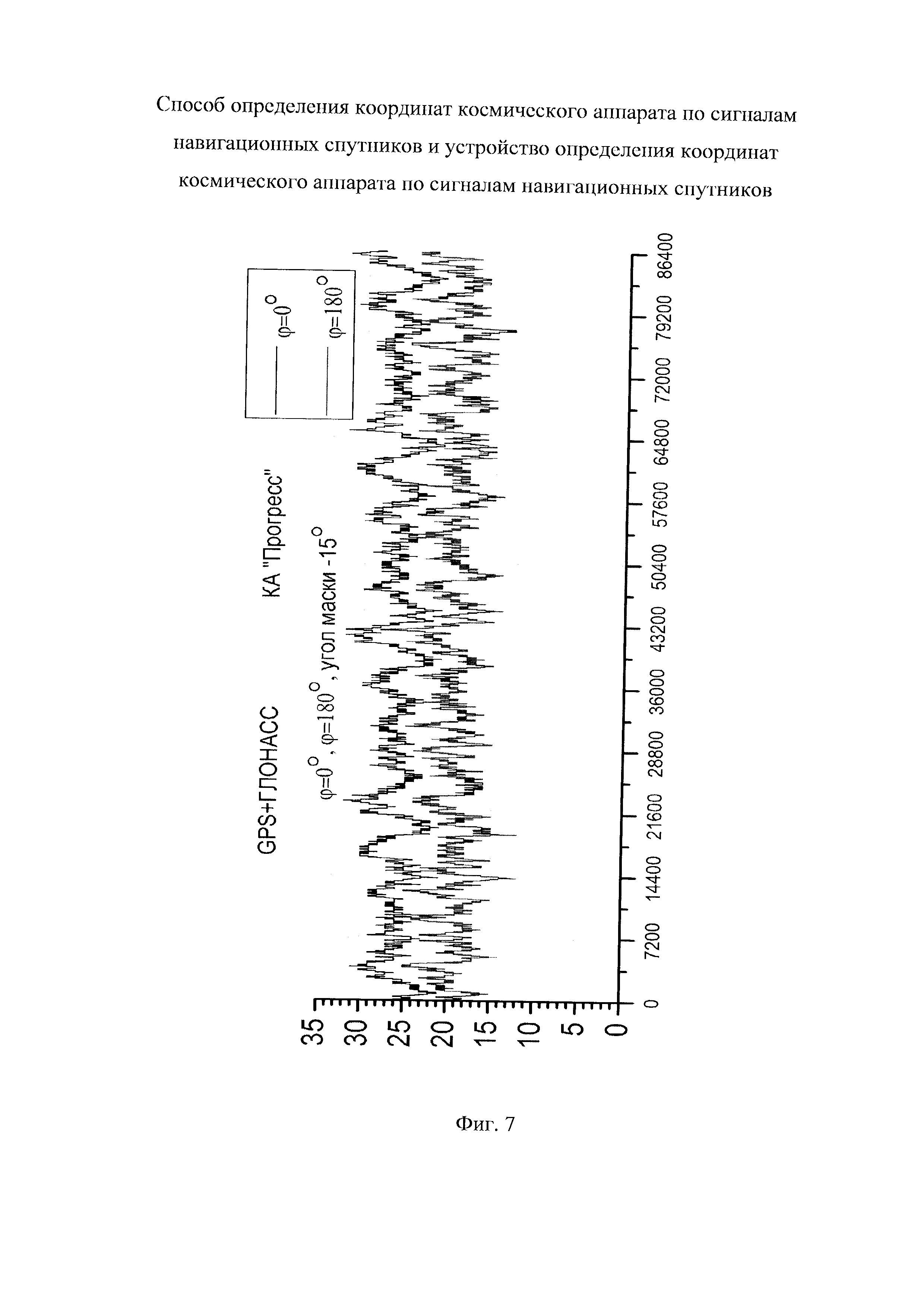
на фиг. 7 - графики максимальной и минимальной видимости навигационных спутников при различной ориентации КА для прототипа.
Предлагаемое устройство демонстрирует фиг. 4, на которой приведена блок-схема устройства. Для упрощения схемы на фиг. 4 представлен вариант АСН, включающий только два антенных контура.
Устройство определения координат космического аппарата по сигналам навигационных спутников (см. фиг. 4), включает в предлагаемом примере m=2 антенн (Ан) 1.1, 1.2, выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат (БФДК) навигационных спутников 2.1, 2.2, а также блок определения координат (БОК) космического аппарата 3, блок ориентации (БО) 5 и задатчик координат антенн (ЗКА) 6, выходы которых подключены к соответствующим входам преобразователя координат антенн (ПКА) 7, выходы которого подключены к первым входам формирователей поправок дальностей (ФПД) 8.1, 8.2, ко вторым входам которых подключены соответственно первые выходы блоков формирования дальностей и координат (БФДК) навигационных спутников 2.1, 2.2, выходы формирователей поправок дальностей (ФПД) 8.1, 8.2 подключены к входам m сумматоров (С) 9.1, 9.2, ко вторым входам которых подключены вторые выходы блоков формирования дальностей и координат (БФДК) навигационных спутников 2.1, 2.2, выходы сумматоров (С) 9.1, 9.2 подключены к первым входам блока определения координат (БОК) космического аппарата 3, ко вторым входам которого подключены первые выходы блоков формирования дальностей и координат (БФДК) навигационных спутников 2.1, 2.2, выход блока определения координат (БОК) космического аппарата 3 является выходом заявляемого устройства.
Рассмотрим функционирование предлагаемого устройства.
Предлагаемое устройство для m=2 включает антенны 1.1, 1.2 приема сигналов навигационных спутников, формирующих СВЧ-сигналы, передаваемые по СВЧ-кабелям в два соответствующих блока формирования дальности и координат навигационных спутников БФДК НС 2.1, 2.2, формирующих на выходе сигналы дальностей dij от Анi до НСij и сигналы координат  соответствующих НС, блок определения координат космического аппарата (БОК КА) 3, блок определения ориентации космического аппарата (БО) 5, формирует на выходе матрицу AГ-С перехода из гринвичской системы координат (ГСК) в связанную с КА систему координат (ССК), задатчик координат антенн (ЗКА) 6, формирует векторы координат
соответствующих НС, блок определения координат космического аппарата (БОК КА) 3, блок определения ориентации космического аппарата (БО) 5, формирует на выходе матрицу AГ-С перехода из гринвичской системы координат (ГСК) в связанную с КА систему координат (ССК), задатчик координат антенн (ЗКА) 6, формирует векторы координат  Ан в ССК, преобразователь координат антенн (ПКА) 7, на первый вход которого поступают координаты антенн в ССК от ЗКА 6, а на второй вход матрица АГ-С от БО 5, на выходе ПКА 7 формирует векторы координат Ан в ГСК, поступающие на первые входы формирователей поправки дальности (ФПД) 8.1, 8.2, на вторые входы которых поступают векторы координат i-го НС j-й Ан, формируемые БФДК 2.1.2.2 НС, на выходах ФПД 8.1,8.2 формируют поправки Δdij дальностей dij i-го НС j-й Ан, поступающую па первый вход сумматора С 9.1, 9.2, на вторые входы которых поступают значения дальности dij i-го НС j-й Ан, формируемая БФДК 2.1, 2.2 НС, на выходе сумматоров формируются значения дальности Dij i-го НС j-й Ан, приведенная к ЦМ КА, поступающая на первый вход БОК КА (3), на второй вход которого поступает вектор координат i-го НС j-й Ан, формируемый БФДК (2) НС, параллельно на входы БОК 3 КА поступают сигналы Dij и векторов координат
Ан в ССК, преобразователь координат антенн (ПКА) 7, на первый вход которого поступают координаты антенн в ССК от ЗКА 6, а на второй вход матрица АГ-С от БО 5, на выходе ПКА 7 формирует векторы координат Ан в ГСК, поступающие на первые входы формирователей поправки дальности (ФПД) 8.1, 8.2, на вторые входы которых поступают векторы координат i-го НС j-й Ан, формируемые БФДК 2.1.2.2 НС, на выходах ФПД 8.1,8.2 формируют поправки Δdij дальностей dij i-го НС j-й Ан, поступающую па первый вход сумматора С 9.1, 9.2, на вторые входы которых поступают значения дальности dij i-го НС j-й Ан, формируемая БФДК 2.1, 2.2 НС, на выходе сумматоров формируются значения дальности Dij i-го НС j-й Ан, приведенная к ЦМ КА, поступающая на первый вход БОК КА (3), на второй вход которого поступает вектор координат i-го НС j-й Ан, формируемый БФДК (2) НС, параллельно на входы БОК 3 КА поступают сигналы Dij и векторов координат  , соответствующие всем НС от всех Ан (1), на выходе БОК КА формируется уточненный по измерениям всех Ан вектор координат КА, соответствующий его центру масс.
, соответствующие всем НС от всех Ан (1), на выходе БОК КА формируется уточненный по измерениям всех Ан вектор координат КА, соответствующий его центру масс.
На кораблях «Союз» и «Прогресс» установлено четыре антенны в общем случае может быть любое количество антенн.
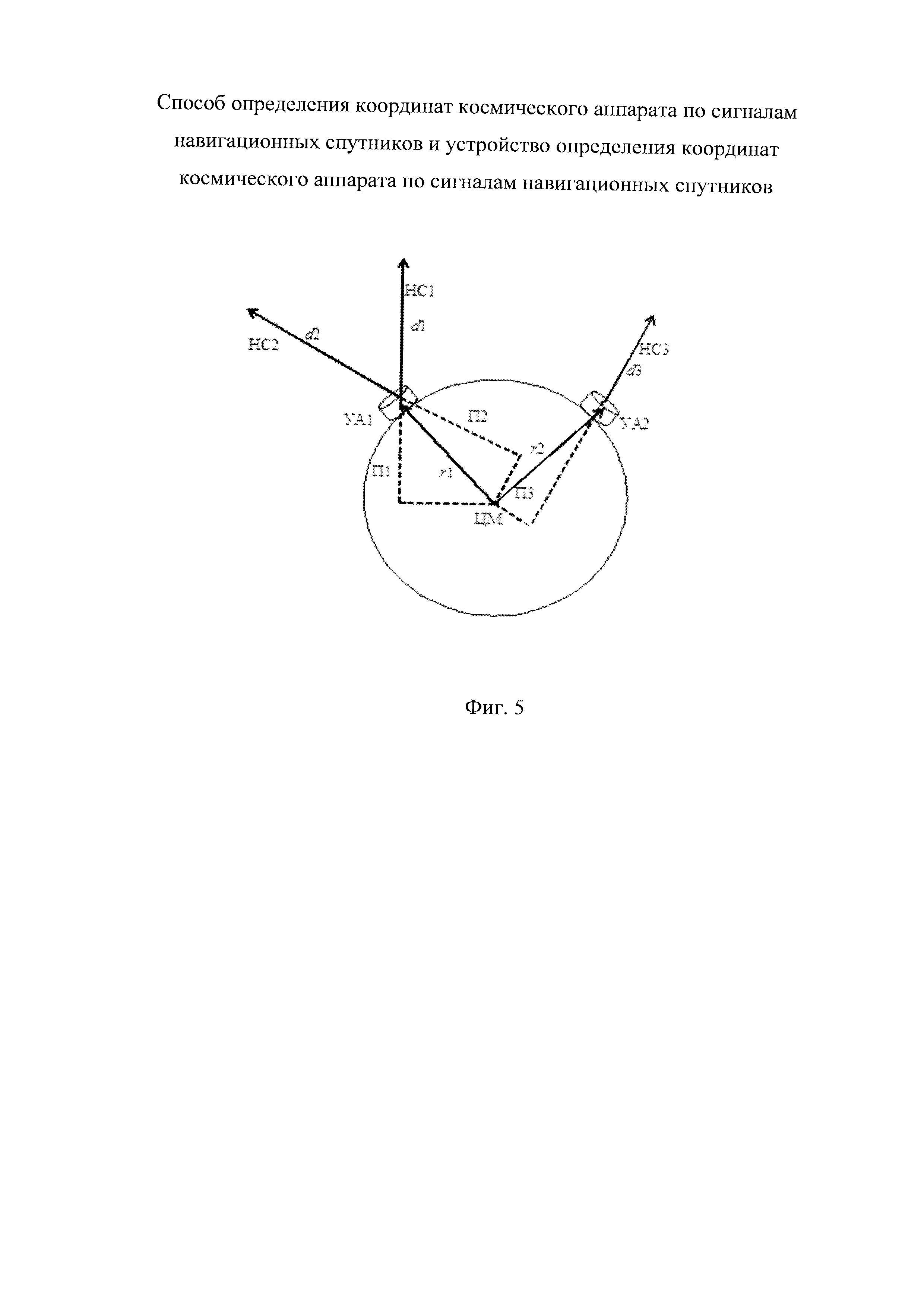
По сути предлагаемое техническое решение осуществляет преобразование полей зрения всех антенн, установленных в разных точках поверхности КА в поле зрения одной антенны, установленной в ЦМ КА, равное сумме полей зрения всех антенн, а измерения всех антенн приводятся к одной общей координате - ЦМ КА, что существенно повышает точность измерений. Сказанное иллюстрирует фиг. 5, на которой для плоского случая изображен КА в виде круга, на поверхности которого установлены две антенны Ан1 и Ан2.
В соответствии с прототипом по измерениям от антенн определяются дальности до НС d1, d2, d3 и векторы направлений на НС1, НС2, НС3 в ГСК. По измерениям каждой из антенн определяются координаты КА, соответствующие координатам Ан. В соответствии с предложенным решением задаются векторы координат антенн и координат ЦМ КА в ССК  ,
,  ,
,  , разности координат
, разности координат  и
и  c помощью матрицы ориентации АГ-С преобразуются в ГСК, относительно которой известны векторы НС1, НС2, НС3. Формируются проекции П1, П2, П3 векторов и на соответствующие направления НС1, НС2, НС3. Проекции П1, П2, П3 представляют собой поправки к дальностям d1, d2, d3 для условной антенны, установленной в ЦМ КА. По преобразованным дальностям (т.е. по дальностям от ЦМ КА до НС) и координатам НС осуществляется определение координат ЦМ КА (то есть координаты условной антенны).
c помощью матрицы ориентации АГ-С преобразуются в ГСК, относительно которой известны векторы НС1, НС2, НС3. Формируются проекции П1, П2, П3 векторов и на соответствующие направления НС1, НС2, НС3. Проекции П1, П2, П3 представляют собой поправки к дальностям d1, d2, d3 для условной антенны, установленной в ЦМ КА. По преобразованным дальностям (т.е. по дальностям от ЦМ КА до НС) и координатам НС осуществляется определение координат ЦМ КА (то есть координаты условной антенны).
Учитывая, что НС находятся в верхней полусфере относительно плоскости местного горизонта, поля зрения антенн близки к полусфере, то при разнесенном пространственном и угловом расположении антенн при любой ориентации КА в поле зрения условной антенны всегда будет находиться достаточное число НС для определения координат ЦМ КА с высокой точностью.
В качестве иллюстрации эффективности предложенного решения можно привести АСН, разрабатываемую для кораблей «Союз» и «Прогресс». На этих КА установлены четыре антенны под некоторыми углами по отношению оси «Y» КА, направленной в зенит в орбитальной системе координат. В результате оси Ан образуют некий пространственный «ежик», при котором максимальное число видимых всеми антеннами НС обеспечивается в ОСК КА (ось «Y» направлена в зенит), а минимальное, когда КА находится в перевернутом положении относительно ОСК (ось «Y» направлена в надир). Достигаемый положительный эффект демонстрируют графики видимости НС для прототипа (фиг. 6) и предлагаемого решения (фиг. 7). На фиг. 7 приведены графики видимости НС ГЛОНАСС+GPS для АСН КА «Прогресс» на суточном интервале полета для «лучшей» (верхний график) и «худшей» (нижний график) ориентации КА с точки зрения видимости НС.
Из приведенных графиков видно, что для «лучшей» ориентации среднее число видимых НС составляет 25-28 спутников, а в «худшей» 18-20 спутников. Это означает, что при любой ориентации КА число видимых НС составляет, по крайней мере, 18-20 спутников, что достаточно для определения вектора координат с высокой точностью.
Для сравнения на фиг. 6 приведены аналогичные графики для прототипа - АСН-М Российского сегмента МКС. Здесь также «лучшая» ориентация МКС для обеспечения видимости НС - ОСК с осью «Y», направленной в зенит, «худшая» - с осью «Y», направленной в надир. Из приведенных графиков следует, что в «лучшей» ориентации МКС число видимых НС ГЛОНАСС+GPS лежит в диапазоне 15-25 НС, в «худшей» - в диапазоне 1-6 НС.
Сравнение результатов показывает, что предложенное решение обеспечивает видимость достаточного количества НС при любой ориентации КА, тогда как прототип обеспечивает достаточную видимость НС в малой окрестности углов поворота МКС относительно ОСК. При больших углах поворота необходимая видимость НС не обеспечивается.
При одной и той же ориентации предложенное решение обеспечивает увеличение числа видимых НС в 2-4 раза. Так, при угле крена 180°, как следует из графиков, приведенных на фиг. 6, видимость НС прототипом на суточном интервале в среднем составляет 2-6 НС, тогда как предложенное решение обеспечивает среднее число видимых НС - 15-20 (см. фиг. 7). В этом случае прототип не может обеспечить формирование координат, а в предложенном решении координаты формируются ежесекундно без сбоев и с высокой точностью.
Список литературы
1. Глобальная Навигационная Спутниковая Система ГЛОНАСС ИКД ГЛОНАСС, Навигационный радиосигнал в диапазонах L1, L2, (редакция 5.1) М., 2008.
2. Н.В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политехника, Санкт-Петербург 2014, раздел 7.1
3. В.Н. Бранец, Е.А. Микрин, В.Н. Платонов, С.Н. Евдокимов, М.В. Михайлов, С.Н. Рожков, Р.Ф. Муртазин, Б.В. Шебшаевич, В. Пантер, Дж. Клабб «Навигационное обеспечение международной космической станции» Сборник трудов X Санкт-Петербургской международной конференции по интегрированным навигационным системам 2003, стр. 7.


Оптическая система формирования и наведения лазерного излучения
Ручная машина для применения космонавтом в скафандре под избыточным давлением в процессе внекорабельной деятельности в условиях невесомости
Электромеханическая кисть
Электромеханическая кисть
Изолирующий контейнер многократного использования космонавтом в скафандре под избыточным давлением в процессе внекорабельной деятельности в условиях невесомости
Посадочное устройство космического корабля
Способ контроля системы энергопитания снабженного солнечными батареями космического аппарата
Устройство для хранения и идентификации перемещаемых объектов на космическом аппарате
Топливный бак двигательной установки космического аппарата
Герметизированное устройство
Способ определения ориентации космического аппарата по сигналам навигационных спутников
Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников
Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников
Способ определения ориентации космического аппарата по сигналам навигационных спутников

