Результат интеллектуальной деятельности: СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано для космического аппарата (КА) на геосинхронной 24-часовой орбите, удерживаемого по геодезической долготе относительно рабочей точки стояния.
Известен способ поддержания КА на геостационарной орбите, в котором после выведения КА поддерживают систематическими коррекциями его геодезическую долготу и широту с отклонением 0,1 градуса и менее. Этот способ усовершенствуется, например, в патентах на изобретения [1-3]. Длительность поддержания таким способом ограничивается запасом рабочего тела двигательных установок КА и в настоящее время может составлять около 10 лет. Более 90 процентов рабочего тела расходуется на поддержание широты КА коррекциями наклонения орбиты.
Известен способ, описанный в [4]. Этот способ принимается как прототип.
Использование этого способа учитывает допустимость наклонения орбиты Международным союзом электросвязи до 5 градусов и более [5]. Такой способ целесообразно применять в космических системах, в которых связь с наземными пунктами возможна при отклонении КА по широте до нескольких градусов.
В способе-прототипе определяют начальное наклонение и долготу восходящего узла орбиты выведения вблизи 270 градусов с учетом эпохи запуска КА на орбиту, срока его активного существования, максимальных ошибок выведения по долготе восходящего узла и наклонению. После выведения КА на орбиту наклонение под влиянием тяготения Луны и Солнца примерно за половину срока активного существования КА уменьшается до минимальной величины (например, менее 0,1 градуса), затем увеличивается за оставшуюся часть срока до начальной величины. После выведения КА на орбиту выполняют систематические коррекции поддержания долготы до окончания эксплуатации КА.
В прототипе наклонение при выведении КА и по окончанию удержания соответствует максимальной допустимой величине отклонения по широте с учетом ошибки по наклонению при выведении. Максимальная длительность удержания КА на орбите пропорциональна начальному наклонению. При допустимом отклонении по широте до 4,5 градусов и при близком к нему максимальном наклонении длительность удержания этим способом до 10 лет, как и при указанном выше первом способе в настоящее время.
Недостатком известных способов является уменьшенная длительность удержания наклонения орбиты КА, т.е. удержания КА в заданной области стояния, соответственно, уменьшенный срок активного существования КА при сохранении работоспособности аппаратуры последнего.
Техническим результатом изобретения является увеличение срока удержания геосинхронного КА в заданной области стояния и увеличения срока активного существования КА.
Идея изобретения состоит в том, чтобы использовать известные способы совместно для сложения присущих им длительностей удержания.
Указанный технический результат достигается тем, что в способе удержания космического аппарата (КА) на геосинхронной 24-часовой орбите, включающем определение максимального наклонения, допустимого в космической системе и не превышающего 5 градусов, выведение КА на орбиту с начальным наклонением, которое меньше допустимого на величину ошибки выведения по наклонению, и выведение с начальной долготой восходящего узла орбиты в диапазоне от 270 градусов до 330 градусов с учетом срока активного существования КА, даты выведения, максимальных ошибок выведения по долготе восходящего узла и по наклонению, включающем поддержание долготы КА коррекциями, выполняют следующие действия, отличающие предлагаемый способ. Начальную долготу восходящего узла орбиты выбирают такую, для которой достигается минимальная величина некорректируемого наклонения. После выведения КА на орбиту выполняют измерения параметров орбиты и по их данным определяют наклонение. После начала увеличения наклонения, последовавшего за уменьшением наклонения по данным измерений, задают контрольную величину наклонения, не превышающую максимальную допустимую величину. Вычисляют часть рабочего тела, необходимую для продолжения поддержания долготы КА после прекращения коррекций наклонения. Коррекциями поддерживают наклонение в пределах заданной контрольной величины до исчерпания рабочего тела за исключением части рабочего тела, вычисленной для продолжения поддержания долготы после прекращения коррекций наклонения.
Предлагаемый способ поясняется чертежом фиг. 1, где показаны схематические графики изменения наклонения i от времени t в прототипе и согласно изобретению.
Введены следующие обозначения:
imax - максимальная допустимая величина наклонения;
i0 - начальная величина наклонения;
i1 - задаваемое наклонение не более максимального допустимого;
t0 - время (дата) выведения КА;
t1 - время достижения минимальной величины наклонения;
t2 - время окончания поддержания в прототипе;
t3 - время начала коррекций наклонения;
t4 - время окончания коррекций наклонения;
t5 - время окончания поддержания;
1 - процесс уменьшения некорректируемого наклонения от начального значения i0 до минимальной величины;
2 - процесс увеличения некорректируемого наклонения от минимальной величины до максимальной допустимой величины imax и окончания поддержания в прототипе;
3 - процесс поддержания наклонения, не превышающего заданную величину i1;
4 - процесс увеличения некорректируемого наклонения от величины не более i1 до максимальной допустимой величины imax и окончания поддержания в изобретении.
После выведения КА наклонение уменьшается практически линейно 1 от начального i0, которое меньше максимального допустимого значения imax на небольшую величину допуска выведения. В момент t1 наклонение достигает минимума, близкого к 0 градусов (см. фиг. 1).
В прототипе далее наклонение увеличивается практически линейно 2 до величины imax. На этом поддержание орбиты в прототипе оканчивается в момент t2 (см. фиг. 1).
В изобретении по результатам измерений определяют начало перехода к повышению наклонения после достижения его минимума в момент t1. Задают некоторую контрольную величину наклонения i1, не превышающую максимальное допустимое значение, i1 < imax, и определяют расчетным путем часть рабочего тела, необходимую для продолжения поддержания долготы после прекращения коррекций наклонения, т.е. на интервале времени от t4 до t5. Далее коррекциями поддерживают 3 величину наклонения не более i1 до исчерпания отведенного для этого рабочего тела на интервале времени от t3 до t4. Затем на интервале от t4 до t5 некорректируемое наклонение увеличивается 4 до величины imax и поддержание оканчивается в момент t5 (см. фиг. 1).
Время подержания КА: t5 - t0 = (t1 - t0) + (t3 - t1) + (t4 - t3) + (t5 - t4). Оно превышает время прототипа на величину времени поддержания наклонения коррекциями: t5 - t2 = t4 - t3. Таким образом, время поддержания может составлять в настоящий период до 20 лет, т.е. может быть удвоено.
Из-за повышения начального наклонения может быть увеличена масса КА. На геодезической широте запуска КА 60 градусов при увеличении наклонения на 1 градус масса КА может быть увеличена на 1,5 процента. В этом случае при сохранении массы полезной нагрузки КА масса рабочего тела может быть увеличена, например, на 25 процентов. При выведении с начальным наклонением 4 градуса эта масса может быть удвоена, а время поддержания увеличено по сравнению с известными способами до 30 лет, или в 3 раза.
Предложенный способ реализуется следующим образом.
Определяют максимальное начальное наклонение imax, не превышающее 5 градусов, с учетом ограничения по минимальному углу возвышения КА над горизонтом, с учетом влияния наклонения на колебания КА по геодезической долготе и с учетом ошибки реализации наклонения при выведении КА. Ограничение 5 градусов обусловлено тем, что при большем наклонении в соответствии с международными правилами изменяются требования по поддержанию долготы. Кроме того, для поддержания долготы с отклонениями до 0,1 градуса наклонение не должно превышать 4,78 градусов.
Определяют начальное наклонение i0, меньшее максимального начального наклонения imax на величину ошибки выведения по наклонению.
Определяют начальную долготу восходящего узла орбиты в пределах от 270 градусов до 330 градусов с учетом даты выведения КА и ошибки реализации этой долготы при выведении. Для этого прогнозируют расчетным путем величину наклонения и выбирают такую величину начальной долготы восходящего узла, при которой наклонение от начальной величины без коррекций достигает минимальной величины, близкой к 0 градусов, например, менее 0,1 градуса. Диапазон от 270 градусов до 330 градусов уточнен по результатам моделирования эволюции наклонения. Начальную долготу восходящего узла, при которой максимальным является время сохранения величины наклонения меньше максимальной допустимой величины imax, можно также определять, выполняя прогнозирование движения КА расчетным путем с учетом коррекций наклонения. Однако предлагаемый способ в составе изобретения реализуется проще и практически без ухудшения точности выбора долготы.
Выводят КА на орбиту с начальным наклонением и долготой восходящего узла, определенными как указано выше.
После выведения КА на орбиту коррекциями поддерживают долготу КА до окончания его эксплуатации. Способы поддержания долготы коррекциями известны, например, [4].
После выведения КА на орбиту систематически выполняют измерения параметров орбиты, по результатам которых определяют наклонение одним из известных способов. Например, оптическими приборами измеряют склонение и прямое восхождение КА и по ним вычисляют наклонение, как описано в [6]. Измерения параметров орбиты можно также выполнять одним из радиотехнических методов космической навигации [7].
По результатам измерений определяют начало увеличения наклонения, последовавшее за уменьшением последнего.
Задают контрольную величину наклонения i1 не превышающую максимальную допустимую величину imax. Эта контрольная величина должна быть достаточно большой, чтобы вычисления долготы восходящего узла выполнялись с приемлемой точностью, необходимой для эффективности коррекций наклонения. Поэтому целесообразно поддерживать наклонение не менее 0,1 градуса. При соблюдении такого условия задаваемая контрольная величина наклонения i1 может быть любой в пределах от 0,1 градуса до imax, так как она не влияет на достижение основной цели изобретения, т.е. на увеличение времени удержания КА на орбите. Конкретное значение величины i1 выбирают и задают с учетом особенностей и требований космической системы, для которой должна поддерживаться орбита КА.
Вычисляют часть рабочего тела, необходимую для продолжения поддержания долготы КА после прекращения коррекций наклонения, т.е. на интервале времени от t4 до t5.
Поддерживают коррекциями наклонение не более контрольной величины i1 до исчерпания рабочего тела двигательной установки за исключением вычисленной части, необходимой для продолжения поддержания долготы КА после прекращения коррекций наклонения.
После прекращения коррекций наклонения оно сохраняет приемлемую величину на интервале времени от t4 до t5, пока наклонение не превысит максимально допустимую величину imax.
Предлагаемый способ удержания космического аппарата на геосинхронной 24-часовой орбите обеспечивает увеличение времени поддержания широты КА в современных условиях с 10 до 20 лет. В случае необходимости запуска КА с космодрома на средних и высоких геодезических широтах обеспечивается поддержание более чем до 20 лет, например, до 30 лет на широте космодрома около 60 градусов. Если время функционирования КА меньше указанных увеличенных сроков из-за ограниченной надежности полезной нагрузки, то может быть увеличена ее масса за счет сокращения массы рабочего тела до величины, достаточной для поддержания орбиты на расчетном сроке функционирования.
Источники информации
1. Патент на изобретение №2381965 «Способ одновременной коррекции удержания вектора наклонения круговой орбиты и периода обращения трехосностабилизированного космического аппарата» / Афанасьев С.М. Открытое акционерное общество «Информационные спутниковые системы» имени академика М.Ф. Решетнёва».
2. Патент на изобретение №2481249 «Способ удержания геостационарного космического аппарата на заданной орбитальной позиции» / Афанасьев С.М., Анкудинов А.В. Открытое акционерное общество «Информационные спутниковые системы» имени академика М.Ф. Решетнёва».
3. Патент на изобретение №2486111 «Способ удержания геостационарного космического аппарата на заданной орбитальной позиции» / Афанасьев С.М., Анкудинов А.В. Открытое акционерное общество «Информационные спутниковые системы» имени академика М.Ф. Решетнёва».
4. Чернявский Г.М., Бартенев В.А., Малышев В.А. Управление орбитой стационарного спутника. М.: Машиностроение. 1984. С. 42, 43, 134-136.
5. Регламент радиосвязи. Международный союз электросвязи. 2012. Статья 22. Раздел III. С. 284.
6. Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космического полета. М.: Наука. 1990. С. 98-104.
7. Шебшаевич B.C. Введение в теорию космической навигации. М.: Советское радио. 1971. С. 170-191.
Способ удержания космического аппарата (КА) на геосинхронной 24-часовой орбите, включающий определение максимального наклонения, допустимого в космической системе и не превышающего 5 градусов, выведение КА на орбиту с начальным наклонением, которое меньше допустимого на величину ошибки выведения по наклонению, и выведение с начальной долготой восходящего узла орбиты в диапазоне от 270 градусов до 330 градусов с учетом срока активного существования КА, даты выведения, максимальных ошибок выведения по долготе восходящего узла и по наклонению, включающий поддержание долготы КА коррекциями, отличающийся тем, что начальную долготу восходящего узла орбиты выбирают такой, для которой достигается минимальная величина некорректируемого наклонения, после выведения КА на орбиту выполняют измерения параметров орбиты и по этим данным определяют наклонение, после начала увеличения наклонения, последовавшего за уменьшением наклонения по данным измерений, задают контрольную величину наклонения, не превышающую максимально допустимую величину, вычисляют часть рабочего тела, необходимую для продолжения поддержания долготы КА после прекращения коррекций наклонения, коррекциями поддерживают наклонение в пределах заданной контрольной величины до исчерпания рабочего тела за исключением указанной части рабочего тела, вычисленной для продолжения поддержания долготы КА после прекращения коррекций наклонения.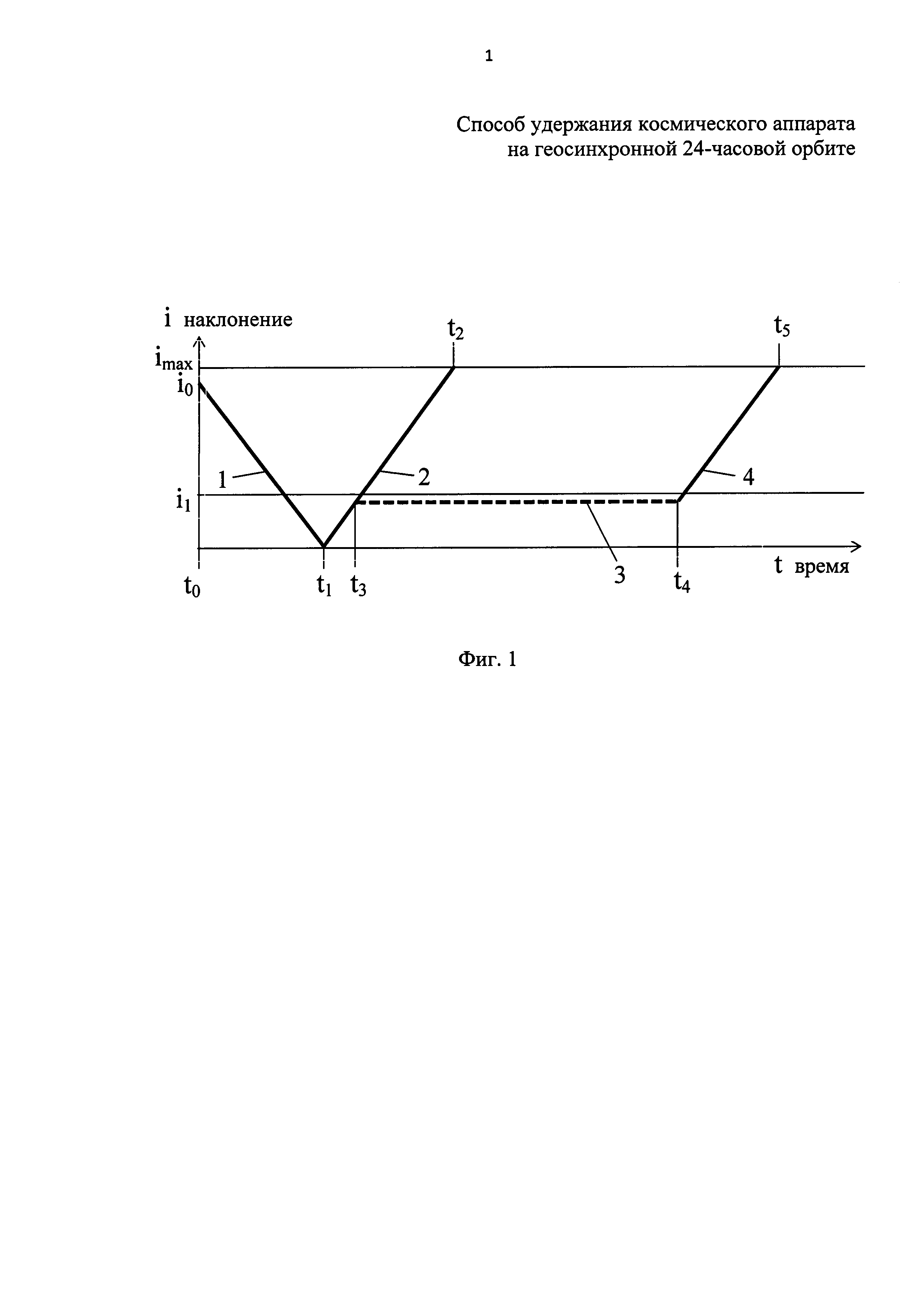
Многофункциональная командно-штабная машина
Устройство обнаружения шумовых гидроакустических сигналов на основе квадратурного приемника
Гидроакустический способ контроля скорости потока жидких сред в трубопроводах
Транспортное средство для перевозки суперконтейнеров с разрядными и экологически опасными грузами
Импульсный источник напряжения
Способ бесстробового автоматического сопровождения подвижной цели
Способ передачи информации в сдв диапазоне
Способ роботизированного обеспечения применения высокоточного оружия
Устройство управления резервированной с выбором среднего арифметического значения выходных параметров системой
Система телеуправления подводным аппаратом
Способ определения вектора состояния пассивного космического объекта
Способ удержания космического аппарата на геостационарной орбите при прерываниях измерений и автономном функционировании
Способ удержания космического аппарата на геостационарной орбите
Способ приведения космического аппарата к долготе стояния на геостационарной орбите

