Результат интеллектуальной деятельности: Способ измерения магнитного курса подвижного объекта и устройство для его осуществления
Вид РИД
Изобретение
Группа изобретений относится к навигационному приборостроению и может быть использована для построения навигационных автономных магнитных компасов, а также магнитных компасов, предназначенных для коррекции накапливающихся ошибок гироскопов, используемых при навигации самолетов и кораблей.
Для измерения магнитного курса в известном способе (патент РФ №2262075, опубл. 10.10.2005 г.) используется информация о векторах магнитного поля Земли, линейного ускорения и как минимум двух проекциях вектора угловой скорости. Вычисление углов наклона, необходимых для измерения магнитного курса, производится решением системы трех уравнений, два из которых представляют проекции вектора напряженности магнитного поля Земли и вектора линейного ускорения на вертикаль места, а третье уравнение - есть уравнение масштаба для направляющих косинусов, определяющих ориентацию вертикали места относительно связанной системы координат подвижного объекта. Для однозначного определения фактических углов наклона подвижного объекта определение истинного решения производится из условия равенства скорости изменения направляющего косинуса, полученного при решении системы уравнений, со скоростью изменения этого направляющего косинуса, вычисленной на основании информации о двух проекциях вектора угловой скорости подвижного объекта и двух направляющих косинусов.
К недостаткам данного способа следует отнести необходимость уточнения знаков квадратных корней при измерении углов наклона и значения величины V, при некоторых режимах движения подвижного объекта.
Кроме того, одним из существенных проблемных аспектов при построении подобного рода магнитометрической системы, является нормирование и нормализация характеристик параметров каждого из феррозондов. К этим параметрам относятся: возможные отклонения статической характеристики от линейной функции, разброс коэффициентов передачи измерительных каналов, а также отклонение осей чувствительности феррозондов от осей ортонормированного базиса корпуса магниточувствительного измерительного преобразователя.
Тем не менее, в результате сопоставительного анализа установлено, что применение феррозондовых датчиков в решении задач навигации является наиболее приемлемым и перспективным. Магнитный компас имеет ограниченную погрешность и малые габариты. В частности, магнитный компас может измерять абсолютный азимут. Поэтому магнитный компас широко используется в навигационных системах. Если магнитный компас расположен всегда горизонтально к поверхности земли, то система на основе двухосевого магнитного датчика может вычислять азимут достаточно точно. В современных индукционных компасах в качестве чувствительного элемента применяется двухосевой тесламетр (фирма Applied Physics System, которая выпускает серию датчиков: APS544, APS520, APS520A, APS533, APS534, APS428C, APS450, APS460, APS470, НР3529 и др.).
Известны магнитные компасы, содержащие маятниковый датчик с двумя ортогонально ориентированными феррозондами, каждый из которых через соответствующий преобразователь соединен со своим входом указателя курса, представляющего собой, например, координатный построитель курса типа вращающегося трансформатора (а.с. N 287327, G01С 17/26, 1970).
В данных устройствах известны два варианта исполнения преобразователей. Так, в первом варианте преобразователи выполнены в виде избирательных усилителей переменного тока, подключаемых непосредственно к статорным обмоткам синусно-косинусного трансформатора (СКТ) указателя курса. Во втором варианте преобразователи выполняются по автокомпенсационной схеме с выходами по постоянному току. В данном случае напряжения с выходов преобразователей в обмотки СКТ указателя курса подаются через соответствующие модуляторы.
Недостатком указанных магнитных компасов является низкая точность измерения курса в географическом диапазоне широт (ϕ), в котором модуль горизонтальной составляющей Вr вектора индукции магнитного поля Земли (МПЗ) изменяется в широких пределах. Так, например, Вr min=600 нТл при ϕ=80° и Вг max=40000 нТл на экваторе (ϕ=0). Низкая точность измерения магнитного курса обусловлена низкой чувствительностью указателя курса при малых значениях горизонтальной составляющей вектора индукции МПЗ.
Техническая сущность подобных магнитных компасов раскрыта в аналогах конструкций (Акиндеев Ю.А. и др. Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации. - М.: Машиностроение, 1989, с. 10-12, 282, 288-290; Вилявская Т.И. Авиационные приборы и автопилоты. - М.: Оборонгиз, 1954, с. 117-120, 190-193), содержащих маятниковый датчик с двумя ортогонально-ориентированными феррозондами, каждый из которых через соответствующий преобразователь соединен со своим входом указателя курса. Магнитный компас работает следующим образом. Проекции горизонтальной составляющей вектора индукции МПЗ, действующие на феррозонды маятникового датчика, поступают на входы соответствующих преобразователей, в которых выделяются и преобразуются в сигналы, поступающие на входы указателя курса, в котором осуществляется формирование и индикация магнитного курса подвижного объекта.
Недостатком данного магнитного компаса является низкая точность измерения магнитного курса в географическом диапазоне широт, обусловленная низкой чувствительностью указателя курса при малых значениях горизонтальной составляющей вектора индукции МПЗ.
Наиболее близким по технической сущности к предлагаемому и выбранным в качестве прототипа является способ (Воронов В.В., Григорьев Н.Н., Яловенко А.В. Магнитные компасы. Теория, конструкция и девиационные работы. Учебное пособие. - СПб.: "Элмор", 2004. - 192 с.) измерения магнитного курса подвижного объекта, использующий отношение двух напряжений (U1 и U2), снятых с двух ортогональных феррозондов и устройство на основе этого способа.
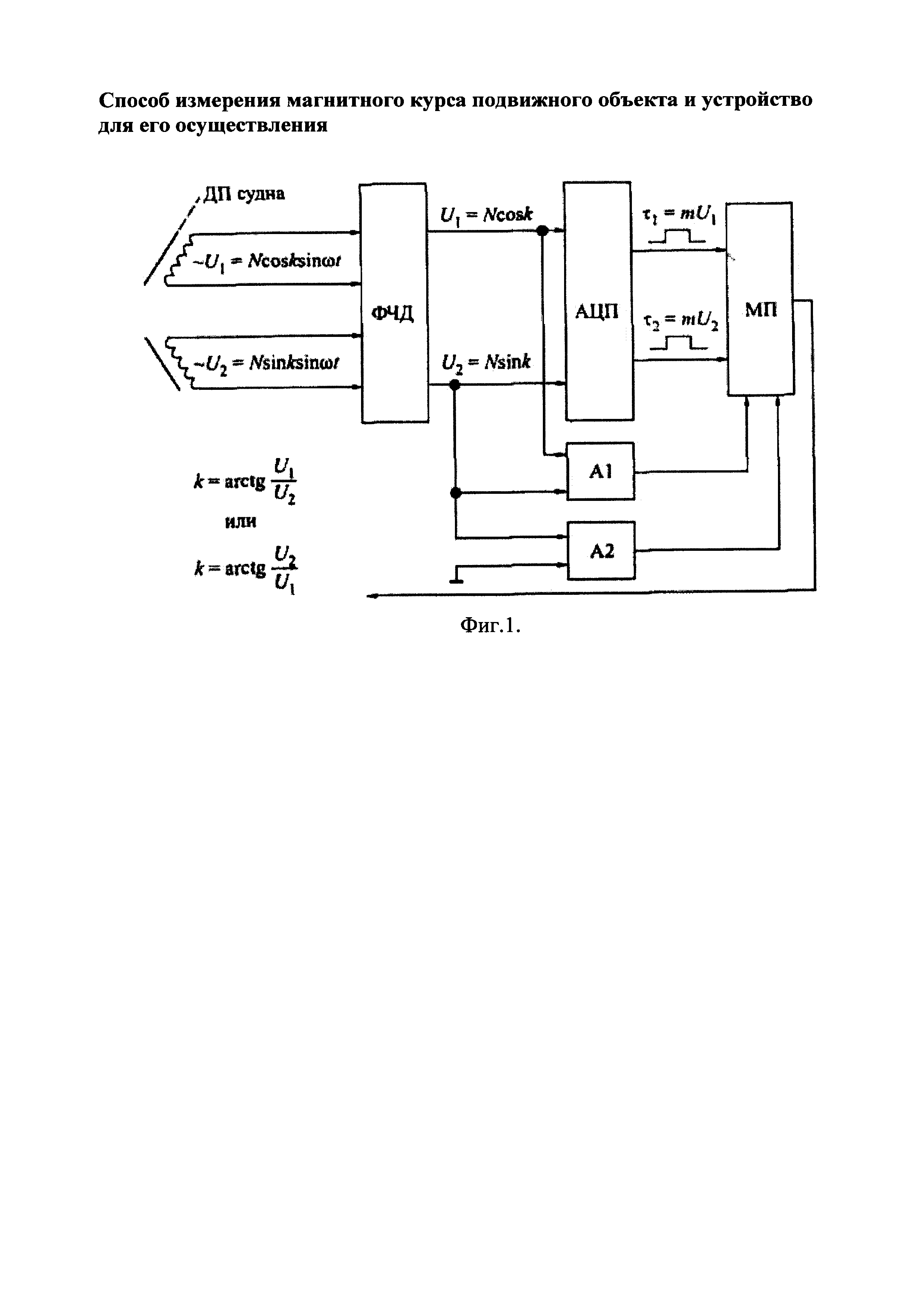
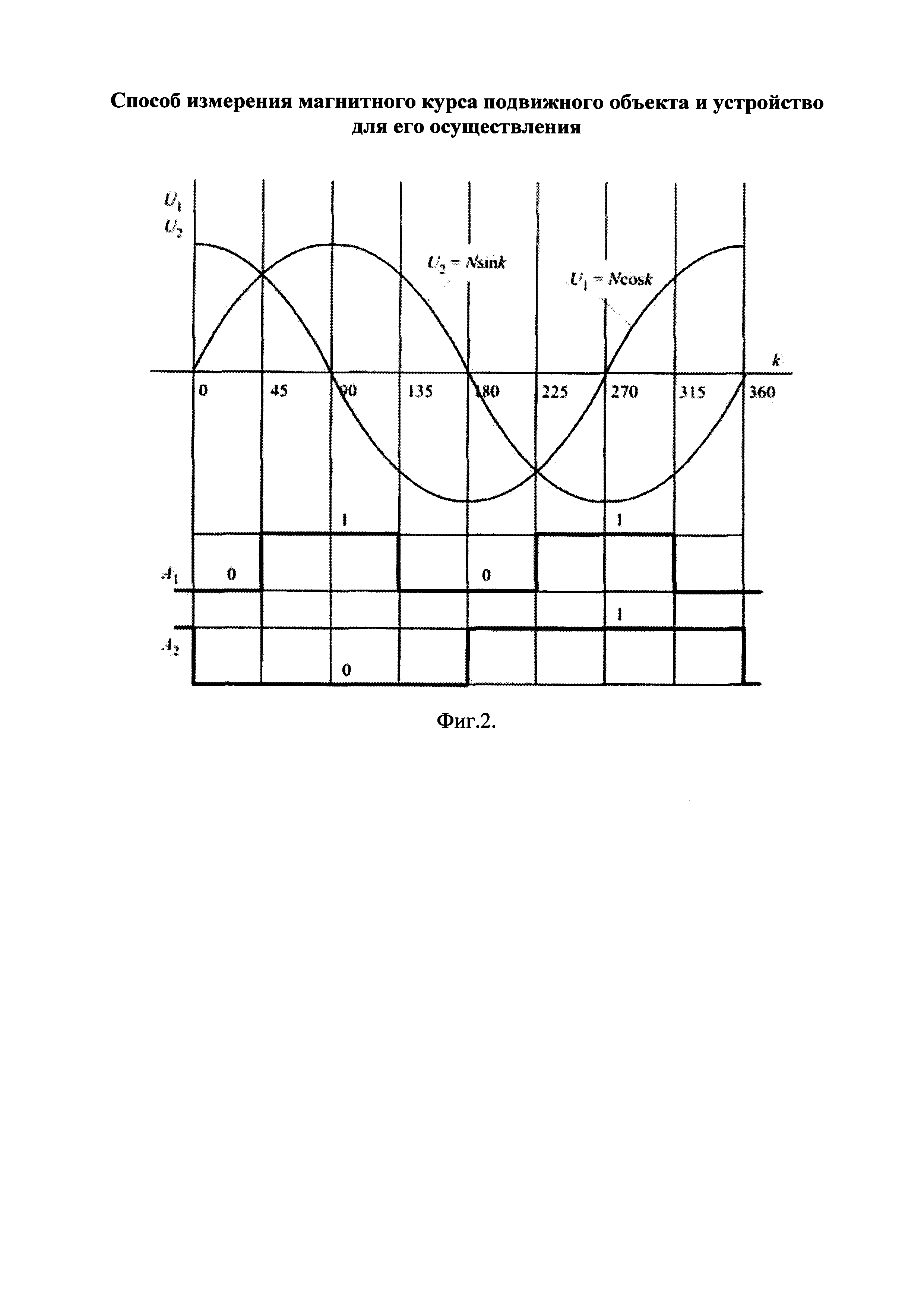
Носителем полезной информации (курс судна k) в таком компасе служит отношение двух напряжений (U1 и U2), снятых с двух ортогональных феррозондов (фиг. 1). Один феррозонд ориентирован по диаметральной плоскости судна, второй - в плоскости шпангоутов.
Сигналы переменного тока U1 и U2 с феррозондов подаются на фазочувствительный детектор ФЧД, который преобразует их в напряжения постоянного тока U1 и U2 и подает на аналого-цифровой преобразователь АЦП. Затем величины U1 и U2 в цифровом виде (τ1 и τ2) поступают на микропроцессор МП, в котором производится вычисление курса судна k. Компараторы А1 и А2 служат для определения рабочего сектора (всего секторов шесть).
На фиг. 2 показаны угловые диаграммы компараторов.
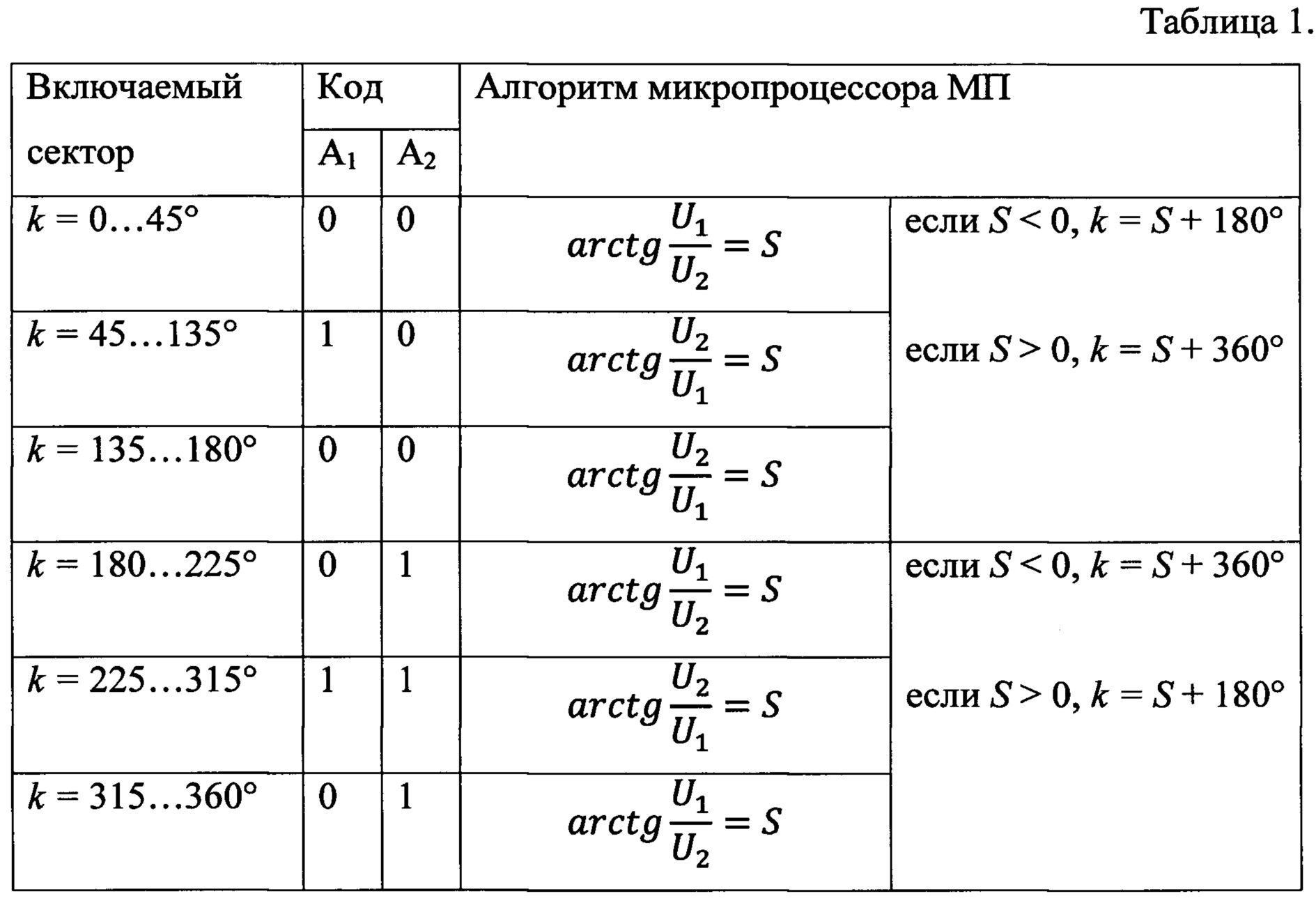
Компаратор А1 сравнивает сигналы U1 и U2 (после прохождения ФЧД) и выдает значение "1" или "0", в зависимости от соотношения U1 и U2:
при |U1|<|U2| на выходе А1 значение "1";
при |U1|≥|U2| на выходе A1 значение "0".
Компаратор А2 сравнивает сигнал U2 с нулевым потенциалом и выдает, соответственно, следующие значения:
при U2<0 на выходе А2 значение "1";
при U2>0 на выходе А2 значение "0".
Порядок работы компараторов и микропроцессора показан в табл.1.
В микропроцессоре МП осуществляется решение задачи по определению квадранта и вычисление курса k. Одновременно вычисляется модуль суммарного магнитного поля Н. В реальных условиях, на стальном судне, индукционный компас (так же, как и стрелочный) определяет направление компасного меридиана Н'.
К недостаткам данного способа следует отнести необходимость преобразования сигналов переменного тока в напряжения постоянного тока, далее аналого-цифрового преобразования и вычисления обратных тригонометрических функций отношения амплитуд, что усложняет алгоритм вычисления магнитного курса и снижает точность вычисления магнитного курса.
Как следствие, наличие фазочувствительного детектора, который преобразует сигналы переменного тока в напряжения постоянного тока, а также аналого-цифрового преобразователя и вычислителя обратных тригонометрических функций отношения амплитуд, усложняют конструкцию магнитного компаса и снижают точность вычисления магнитного курса. Существенным проблемным аспектом при построении подобного рода магнитометрической системы, является нормирование и нормализация характеристик параметров каждого из двух феррозондов. К этим параметрам относятся: возможные отклонения статической характеристики от линейной функции, разброс коэффициентов передачи измерительных каналов, а также отклонение осей чувствительности феррозондов от осей ортонормированного базиса корпуса магниточувствительного измерительного преобразователя.
Задачей изобретения является создание способа измерения магнитного курса подвижного объекта по отношению амплитуд выходных сигналов одного феррозонда и разработка устройства для измерения магнитного курса подвижного объекта, реализующего предлагаемый способ.
Единый технический результат предлагаемого решения заключается в упрощении алгоритма преобразования исходной информации, упрощении конструкции магнитного компаса и повышении точности вычисления магнитного курса.
Указанный единый технический результат при осуществлении группы изобретений по объекту-способу достигается тем, что измерение магнитного курса подвижного объекта осуществляется по значениям выходных сигналов одного феррозонда.
Особенностью является то, что обмотки возбуждения феррозонда питаются от генератора однополярных импульсов, знак полярности которых меняется в соответствии с направлением вектора измеряемого магнитного поля, причем номера выходных сигналов, соответствующие номерам выходных обмоток, знаки их полярности и отношение амплитуд определяют один из четырех секторов измеряемого магнитного курса, а отношение амплитуд выходных сигналов внутри сектора определяет магнитный курс.
Указанный единый технический результат при осуществлении группы изобретений по объекту-устройству достигается тем, что устройство содержит феррозонд, имеющий первый и второй пермаллоевые сердечники с обмотками возбуждения и сигнальную обмотку, генератор однополярных импульсов и блок определения курса.
Особенностью является то, что в устройство введены коммутатор, электронный ключ, первое и второе пороговые устройства, блок определения полярности выходных сигналов, блок поиска максимума выходных сигналов и вторая сигнальная обмотка, при этом первая и вторая сигнальные обмотки размещены соответственно на первом и втором пермаллоевых сердечниках, которые расположены под углом друг к другу, а выходы обеих сигнальных обмоток соединены с входами электронного ключа, причем выходы первой и второй сигнальных обмоток соединены соответственно с входами первого и второго пороговых устройств, а выходы последних соединены с двумя входами коммутатора, при этом другой вход последнего соединен с выходом генератора однополярных импульсов, выходы электронного ключа соединены параллельно с входами блока определения полярности выходных сигналов и блока поиска максимума выходных сигналов, а выходы последних двух блоков соединены с входами устройства вычисления магнитного курса.
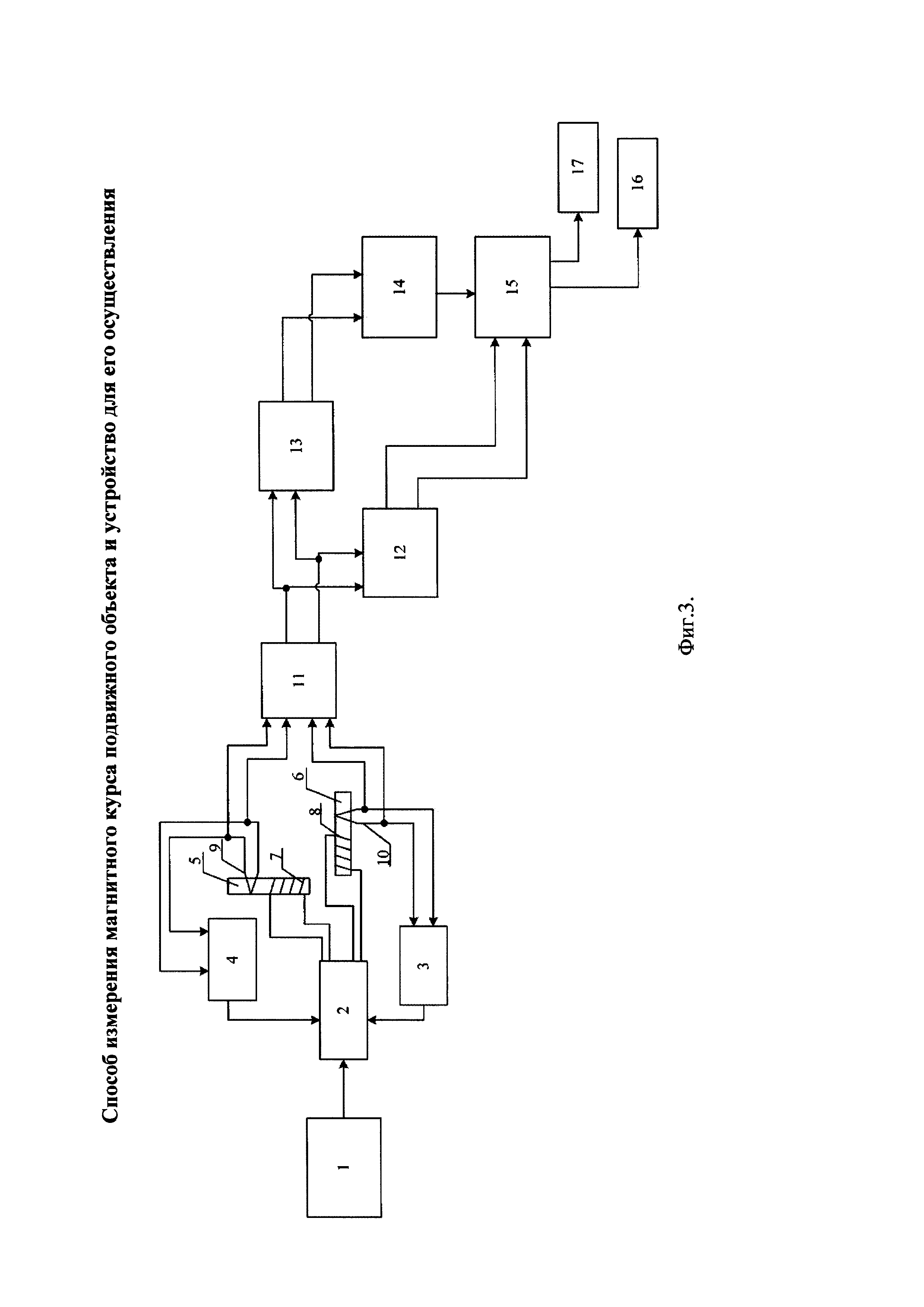
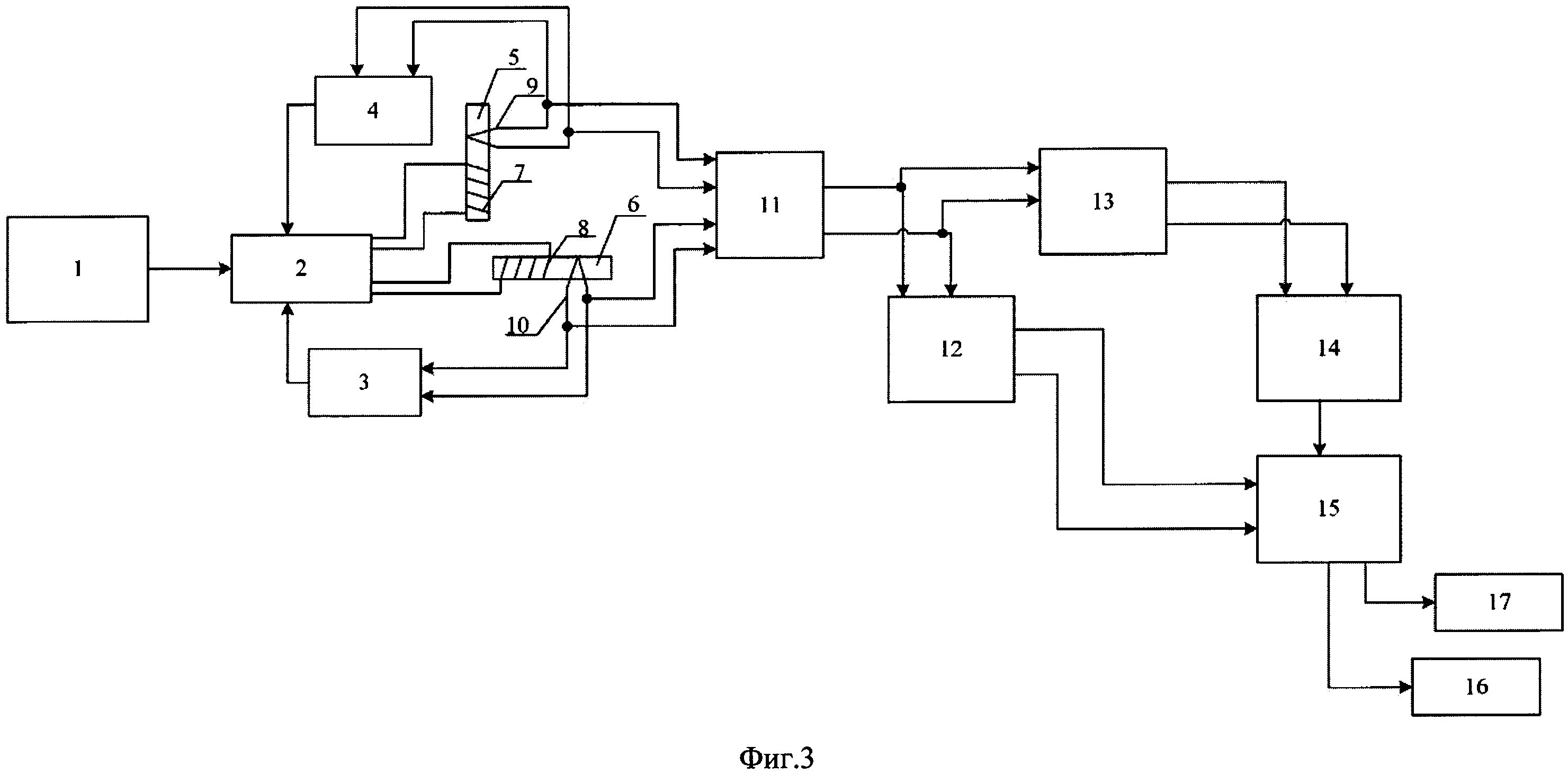
Предлагаемое техническое решение иллюстрируется блок - схемой измерения магнитного курса (фиг. 3).
Предлагаемый способ осуществляется с помощью устройства.
Устройство содержит: генератор 1 однополярных импульсов; коммутатор 2, меняющий полярность импульсов тока идущих от генератора; первое и второе пороговые устройства 3 и 4; первый и второй пермаллоевые сердечники 5 и 6, расположенные под прямым углом друг к другу; обмотки возбуждения 7 и 8 (входные обмотки); первая и вторая сигнальные обмотки 9 и 10; электронный ключ 11; блок 12 определения полярности выходных сигналов; блок 13 поиска максимума выходных сигналов; блок 14 вычисления значения отношения амплитуд: блок 15 определения курса; блок 16 индикации и блок 17 системы управления.
Генератор 1 однополярных импульсов через коммутатор 2 подает импульсы тока на обмотки возбуждения 7 и 8 (входные обмотки) жестко закрепленного на подвижном объекте феррозонда, первый и второй пермаллоевые сердечники 5 и 6, разнесенные под прямым углом друг к другу. Индуцируемые в сигнальных обмотках 9 и 10 выходные сигналы, при отсутствии внешнего магнитного поля, имеют номинальную амплитуду. При наличии внешнего (измеряемого) магнитного поля, направленного согласно (однонаправленно) с магнитным полем обмотки возбуждения, амплитуда выходных сигналов возрастает, причем пороговые устройства 3 и 4 в этом случае не включаются. Если внешнее магнитное поле направлено встречно магнитному полю обмотки возбуждения, то амплитуда выходного сигнала в этом случае становится меньше номинального значения. Тогда включается соответствующее пороговое устройство 3 или 4, воздействующее на коммутатор 2, который поменяет местами начало и конец обмотки возбуждения, расположенной на соответствующем пермаллоевом сердечнике феррозонда, таким образом, что ее магнитное поле будет направлено согласно с внешним магнитным полем, при этом поменяется полярность выходных сигналов. Следовательно, направление магнитного поля обмоток возбуждения и внешнего магнитного поля всегда будет направлено согласно, амплитуда выходных сигналов будет варьироваться от номинального до максимального значений, а их полярность будет определяться направлением внешнего магнитного поля. Далее выходные сигналы поступают на электронный ключ 11, с выхода которого они напрямую подаются на блок 13 поиска максимума выходных сигналов и на блок 12 определения полярности выходных сигналов. С выхода блока 13 поиска максимума выходных сигналов, последние поступают на входы блока 14 вычисления значения отношения амплитуд: сигнала с обмотки 9 к сигналу с обмотки 10. Таким образом, на входы блока 15 определения курса подаются сигналы с блока 12, определяющие полярность сигналов с обмотки 9 и с обмотки 10 и, кроме того, сигнал равный значению отношения амплитуд: сигнала с обмотки 9 к сигналу с обмотки 10. Данный набор сигналов микропроцессором преобразуется в магнитный курс блока 16 индикации и блока 17 системы управления.
Порядок работы микропроцессора показан в табл.2.
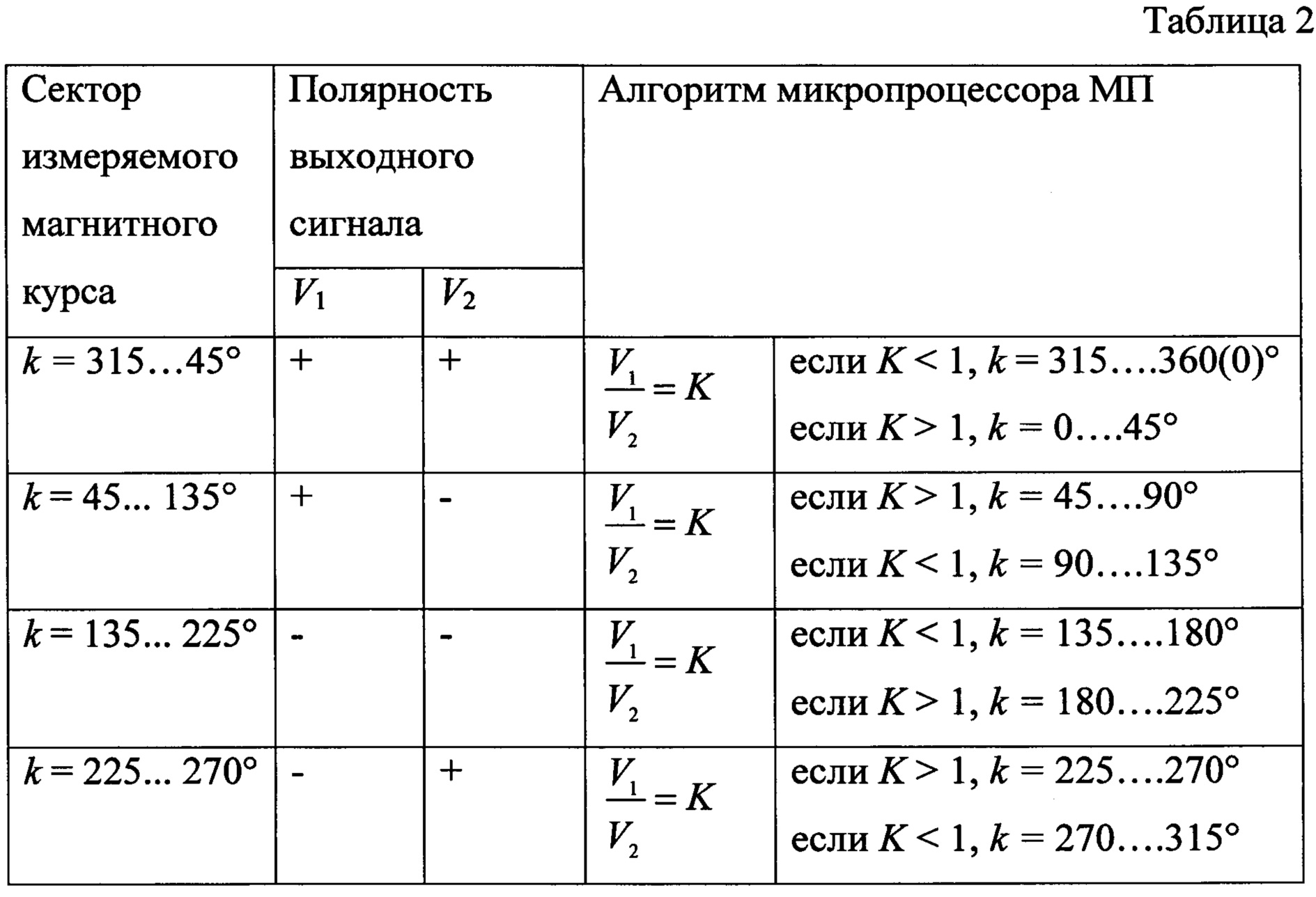
Таким образом, предлагаемый алгоритм работы микропроцессора однозначно, с учетом номера выходных сигналов, соответствующего номерам выходных обмоток, знаков их полярности и отношения амплитуд, позволяет определить один из четырех секторов измеряемого магнитного курса, а отношение амплитуд выходных сигналов внутри сектора определяет магнитный курс.
Предлагаемое устройство для измерения магнитного курса подвижного объекта реализовано на базе только одного феррозонда, при этом в нем используется четыре сектора для вычисления курса, отсутствуют фазочувствительный детектор и аналого-цифровой преобразователь, кроме того, в предлагаемом устройстве вычисляется отношение амплитуд выходных сигналов, а не обратная тригонометрическая функция этого отношения (прототип). Все вышеперечисленное, позволяет упростить алгоритм преобразования исходной информации, упростить конструкцию магнитного компаса и повысить точность вычисления магнитного курса.
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Способ получения многослойного покрытия для режущего инструмента
Весоизмерительное устройство
Датчик давления, использующий оптический метод преобразования информации
Датчик аэрометрических давлений
Датчик аэрометрических давлений
Датчик аэрометрических давлений

