Результат интеллектуальной деятельности: БЕСПОДШИПНИКОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
Вид РИД
Изобретение
Область техники
Изобретение относится к области электромашиностроения и может быть использовано в различных установках с высокоскоростным электрическим приводом рабочего органа, в частности, в условиях вакуума.
Предшествующий уровень техники
Широко известны бесконтактные электрические машины с магнитным подвесом вращающегося ротора. Традиционный бесподшипниковый электродвигатель состоит из обычного асинхронного двигателя, ротор которого установлен в одном осевом и двух радиальных активных магнитных подшипниках или только в двух конических магнитных подшипниках (Ю.Н. Журавлев «Активные магнитные подшипники», «Политехника», Санкт-Петербург, 2003, с. 22, рис. 2,4 [1]). Весьма эффективный способ сделать электрическую машину конструктивно наиболее простой и компактной - это совместить в магнитных подшипниках функции подвеса и вращения ротора. На рис. 7,24б с. 149-150 [1] показан электродвигатель содержащий ротор и два статора магнитного подвеса и вращения ротора. Существенным недостатком (проблемой) такого двигателя является необходимость использования сложного устройства для разделения радиальных сил магнитного подвеса и момента от вращающегося магнитного поля. Например, для решения этой задачи предлагается применение специальных датчиков вектора (положения и направления) магнитных потоков статоров, что очень усложняет как конструкцию, так и систему управления (с. 151-153 [1]).
Известна бесподшипниковая электрическая машина по патенту RU №2562448, принятая за прототип, в которой решена проблема опрокидывания ротора из-за несимметрии момента вращения при приложении нагрузки на магнитные подшипники - электродвигатели. Бесподшипниковый электродвигатель - прототип содержит ротор в виде части полого конуса и два статора подвеса и вращения, конические рабочие поверхности которых расположены соответственно напротив внешней и внутренней поверхностей полого конуса, на которых установлены части из шихтованного ферромагнитного материала. Выполнение статоров и частей ротора коническими обусловлено необходимостью придания ротору осевой жесткости. Перегрузочная способность электродвигателя по оси вращения, равная перегрузочной способности в радиальном направлении, достигается при угле конусности, равном 14 градусам (с. 43 [1]). Это приводит к необходимости значительной конусной проточки ротора и статоров, что усложняет изготовление по сравнению с традиционными цилиндрическими шихтованными магнитопроводами. Кроме этого незначительное расстояние между статорами обусловливает недостаточно высокую угловую жесткость ротора.
Сущность изобретения.
Задача изобретения заключается в упрощении изготовления бесподшипникового электродвигателя, повышении осевой и угловой жесткостей и перегрузочных способностей, создании дополнительного вращающего момента (мощности) при сохранении объема двигателя - прототипа. Поставленная задача решена благодаря тому, что в бесподшипниковом электродвигателе, содержащем ротор в виде полого вала с внешним и внутренним ферромагнитными частями и два статора, рабочие поверхности которых выполнены либо цилиндрическими, либо с минимальным углом конусности (единицы градусов), внешняя поверхность ротора в зоне внутреннего статора снабжена диском-ротором относительно плоскостей которого установлены соответственно два торцовых статора осевого центрирования диска. Кроме этого диск в области рабочих поверхностей снабжен витыми тороидальными магнитопроводами, а торцовые статоры выполнены с обмотками на зубцах витых тороидальных магнитопроводов. Обмотки каждого торцового статора разделены по окружности на четыре секции, противоположно расположенные пары секций статоров подключены соответственно к четырем электронным блокам центрирования диска. Обмотки торцовых статоров могут быть подключены к двухфазному или трехфазному источнику напряжения.
Перечень фигур и чертежей
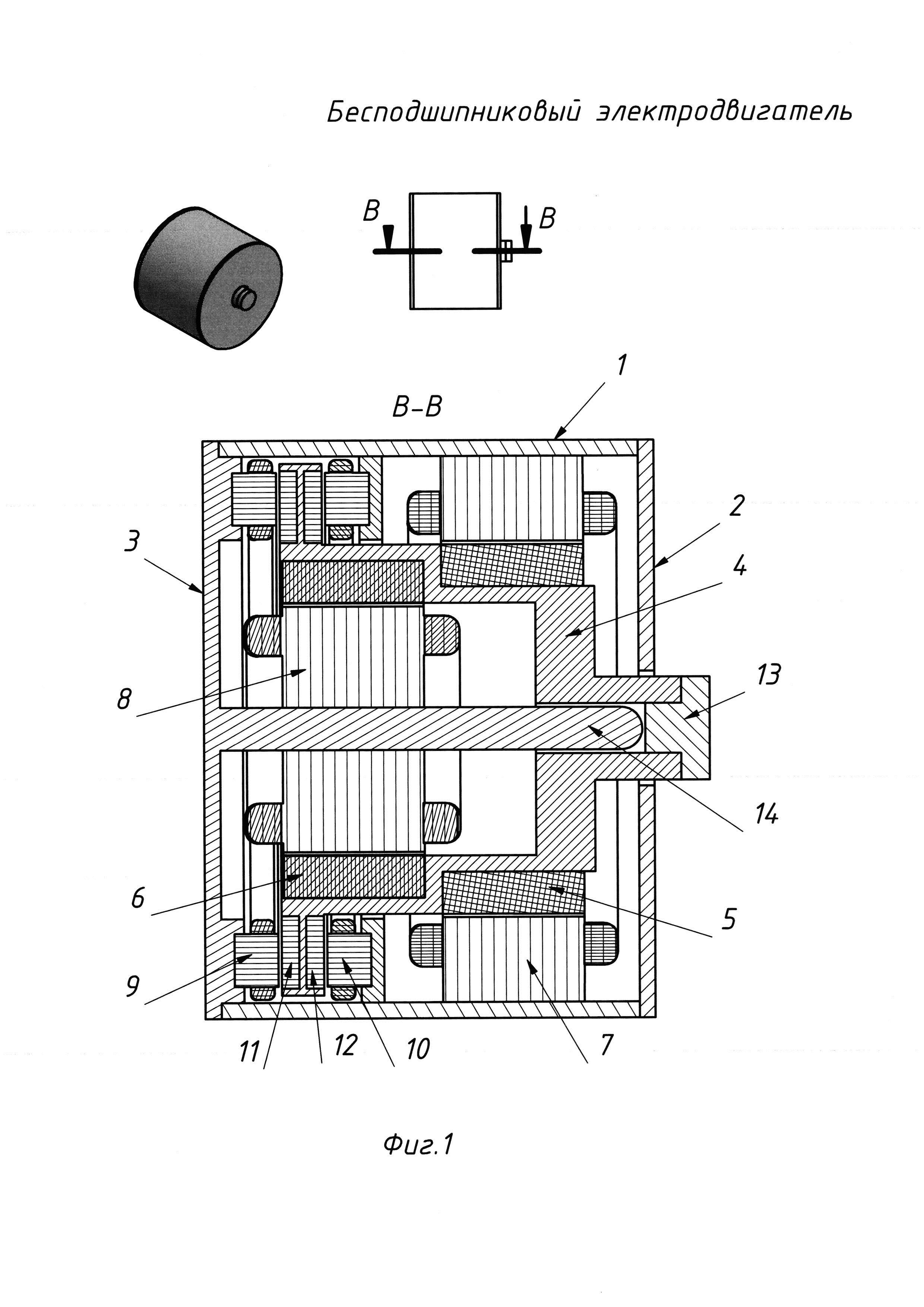
На фиг. 1 показана конструкция предложенного электродвигателя с использованием тороидальных витых магнитопроводов в торцовых статорах и диске-роторе устройства осевого центрирования.
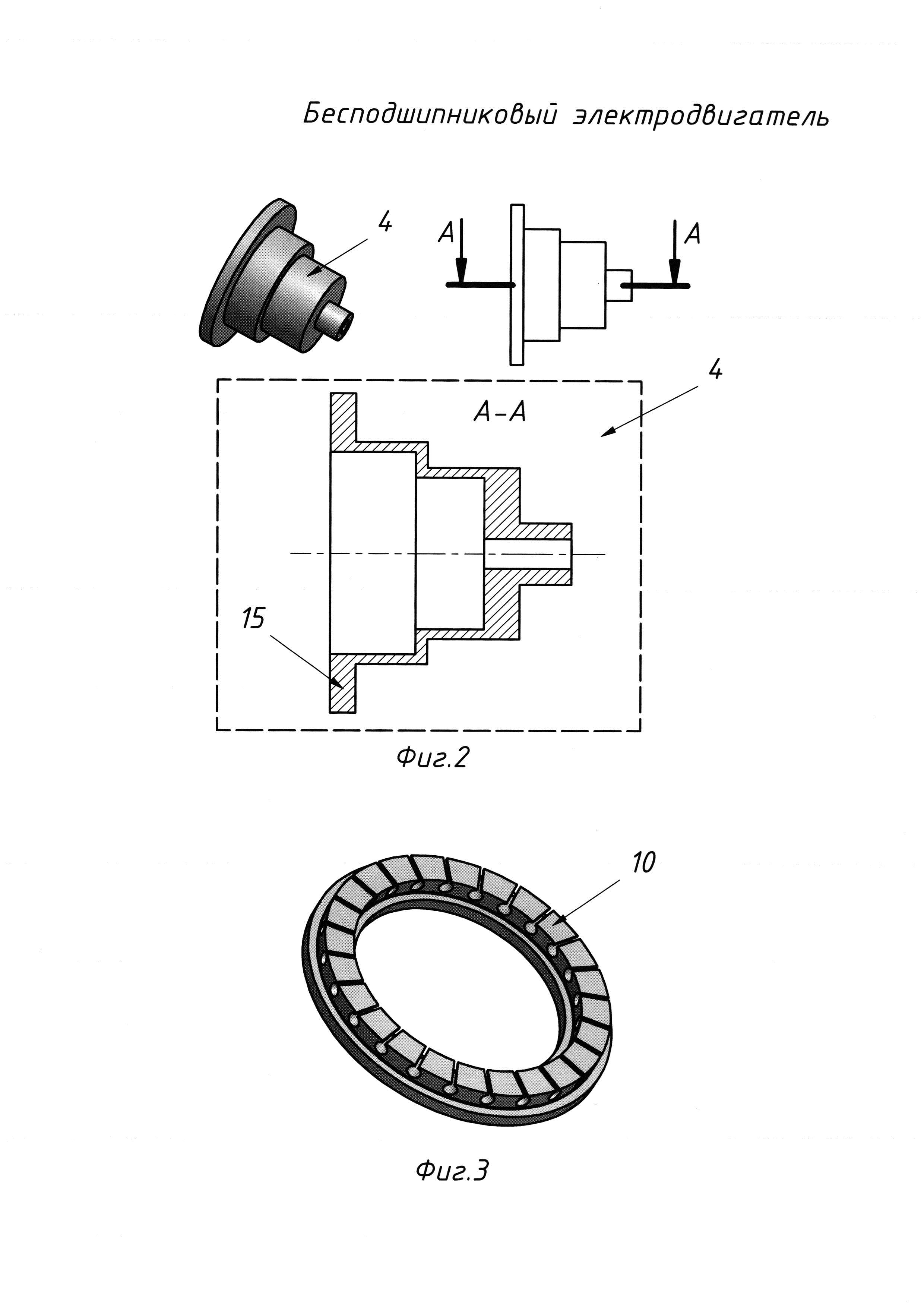
На фиг. 2 представлен ротор предложенного электродвигателя (без ферромагнитных шихтованных внешней и внутренней частей) с простым традиционным исполнением диска устройства осевого центрирования в виде выступа, образованного при токарной обработке заготовки ротора.
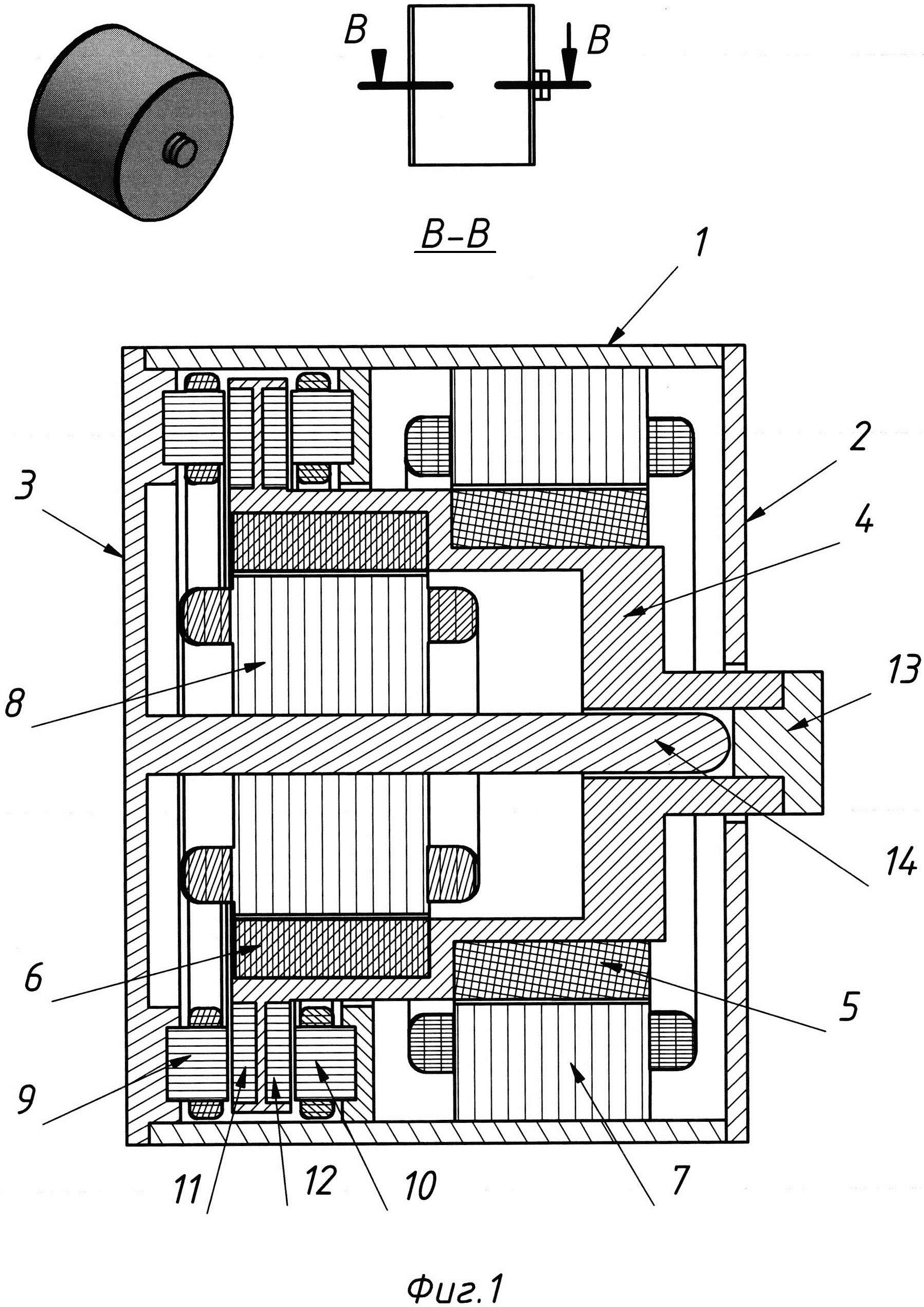
На фиг. 3 представлен торцовый статор осевого центрирования с использованием зубцового тороидального витого магнитопровода (без обмоток).
На фиг. 1-3 приняты следующие обозначения.
1 - корпус,
2 - передняя крышка,
3 - задняя крышка,
4 - ротор,
5 - внешняя ферромагнитная часть ротора,
6 - внутренняя ферромагнитная часть ротора,
7 - первый (внешний) статор с обмотками,
8 - второй (внутренний) статор с обмотками,
9 - первый торцовый статор с обмотками на зубцах тороидального магнитопровода,
10 - второй торцовый статор с обмотками,
11, 12 - витые тороидальные магнитопроводы на диске осевого центрирования,
13 - заглушка полого ротора,
14 - упругий страховочный стержень на задней крышке.
Предложенный бесподшипниковый электродвигатель содержит (фиг. 1) корпус 1, переднюю крышку 2, заднюю крышку 3, ротор 4 с внешней ферромагнитной частью 5 и с внутренней ферромагнитной частью 6, первый (внешний) статор 7, второй (внутренний) статор 8, первый торцовый статор 9 на задней крышке, второй торцовый статор 10, установленный в корпусе, тороидальные навитые магнитопроводы 11 и 12 на диске осевого центрирования ротора 4. Полый ротор снабжен заглушкой 13, через которую выполняют связь с рабочим органом агрегата, в который установлен предложенный двигатель. При простом традиционном исполнении осевого подшипника диск осевого центрирования в виде выступа 15 (фиг. 2) образован при токарной обработке внешней поверхности заготовки ротора в зоне второго (внутреннего) статора 8 (фиг. 1) ввиду свободного объема в корпусе. В этом случае статоры осевого подшипника, питаемые постоянным напряжением (с нулевой частотой несущей), могут быть выполнены монолитными (с. 49-51 [1]). При этом в качестве датчика осевого смещения ротора 4 используются статоры 7 и 8 с ферромагнитными частями 5 и 6 (фиг. 1) с минимальным углом конусности (единицы градусов). Применение в осевом подшипнике тороидальных витых магнитопроводов практически исключают потери от вихревых токов при динамических смещениях ротора, позволяет питать обмотки переменным напряжением, что обусловливает применение простой (как и для статоров 7 и 8) бездатчиковой системы управления магнитными потоками, например, по заявке №2009141906 «Способ центрирования ферромагнитного тела». При этом обмотки каждого торцового статора 9 и 10 разделены по окружности на четыре секции, а противоположно расположенные пары секций статоров подключены соответственно к четырем электронным блокам указанной системы центрирования. Это позволяет получить дополнительную значительную угловую жесткость и перегрузочную способность ротора 4. Двухфазные или трехфазные обмотки торцовых статоров подключены (как и обмотки статоров 7 и 8) к двухфазному или трехфазному источнику напряжения для создания вращающегося магнитного поля. Для получения максимального момента (мощности) на валу предложенного двигателя части 5, 6, 11 и 12 (фиг. 1) как и в традиционных асинхронных двигателях оснащены проводящими элементами типа «беличьей клетки». Для магнитопроводов 11 и 12 проводящие элементы могут быть выполнены в виде радиальных винтов, которые одновременно служат для крепления магнитопроводов к диску осевого центрирования.
Следует сделать важное замечание относительно перегрузочной способности магнитных подшипников, работающих на постоянном (с нулевой несущей) и переменном токе. Подшипники на переменном токе имеют поддерживающую силу в виде пульсации с удвоенной частотой питающего напряжения, что обусловливает снижение перегрузочной способности в два раза. Этот недостаток устраняется, например, при импульсном напряжении питания, когда ток имеет прямоугольную форму (заявка №2009141906). Использование же в магнитном подшипнике вращающегося магнитного поля устраняет пульсацию поддерживающей силы и лишает (в отношении перегрузочной способности) преимущества подшипник на постоянном токе.
Конструкция БЭМ с полым ротором и внешним и внутренним статорами обусловливает решение проблемы разрушающего обката ротора при аварийной посадке его на ограничительные страховочные упоры (подшипники). В этом случае легко выполнить страховочные упоры, взаимодействующие одновременно с внешней и внутренней поверхностями ротора (Е.А. Артюхов «Ограничитель скорости обката ротора», журнал «Гироскопия и навигация», №3 (30), 2000). В БЭМ на фиг. 3 посадка вращающегося ротора на стержень 13 вызывает прямой (совпадающий с направлением вращения ротора) обкат, который благодаря упругому смещению стержня прерывается обратным (противоположным вращению ротора) обкатом при контакте вала 9 с крышкой 12.
Предложенный бесподшипниковый электродвигатель может быть реализован в различных устройствах - от маломощных установок, работающих в вакууме, до мощных агрегатов (шпинделей, насосов и турбин), где требуются значительные расходы на смазку традиционных подшипников скольжения и качения.
Универсальный неконтактный гироскоп
Неконтактный подвес ротора
Бесподшипниковая электрическая машина
Вибрационный гироскоп
Электростатический гироскоп
Электромагнитный гироскоп
Универсальный неконтактный гироскоп
Неконтактный подвес ротора
Бесподшипниковая электрическая машина
Вибрационный гироскоп
Электростатический гироскоп
Электромагнитный гироскоп

