Результат интеллектуальной деятельности: УПРАВЛЕНИЕ ПРИВОДОМ НА ПЕРЕДНИЕ КОЛЕСА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к приводам на передние колеса, а более конкретно - к управлению приводами на передние колеса на рабочих транспортных средствах, таких как самоходные грейдеры.
УРОВЕНЬ ТЕХНИКИ
Известные рабочие транспортные средства, например, такие как самоходные грейдеры, имеют возможность полного привода по меньшей мере с одним двигателем для приведения в действие передних колес и трансмиссией для передачи мощности от двигателя или, возможно, электрического двигателя, на задние колеса. Во время поворотов транспортного средства передние колеса могут двигаться по дугообразной или круговой траекториям, и для эффективности транспортного средства, а также по опыту работы, может потребоваться их вращение с большими скоростями, чем задних колес, когда диаметр передних колес равен диаметру задних колес, так как передние колеса могут проходить более большие расстояния. Также может потребоваться, чтобы переднее колесо на внешнем радиусе поворота (внешнее колесо) вращалось с большей скоростью, чем скорость переднего колеса на внутреннем радиусе поворота (внутреннее колесо), так как траектория внешнего колеса имеет больший радиус, чем траектория, по которой движется внутреннее колесо.
Известные рабочие транспортные средства решают данные проблемы с помощью открытых дифференциалов и вариантов ограниченного дифференциала, включая: дифференциалы с ограниченным проскальзыванием; и дифференциалы, которые являются самоблокирующимися, блокируемые вручную или блокируемые посредством программного обеспечения при пороговых различиях между фактическими скоростями вращения и прогнозируемыми скоростями вращения левого и правого колес (обнаружение проскальзывания) и т.д. В попытках решить очевидные проблемы, проявляемые устройствами, отмеченными выше, некоторые решения отслеживают и независимо регулируют скорости вращения каждого из передних колес при всех обстоятельствах на основании углов поворота передних колес, а в случае таких транспортных средств, как самоходные грейдеры, углов сочленения транспортного средства. Последние решения имеют различные недостатки, которые требуют компромиссов.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Авторы изобретения признают, что просто независимое управление скоростью вращения каждого из передних колес не может обеспечить непосредственного управления независимыми характеристиками управляемости для средних и дифференциальных скоростей вращения. Подобный подход содержит две схемы управления; одну для правого колеса, а другую для левого переднего колеса. Соответственно, имеется компромисс между ускорением и плавностью принятия нагрузки, с одной стороны, и управлением и боковой тягой - с другой стороны. Средняя скорость вращения передних колес, которая является важной для агрессивности и пробуксовывания передних колес, не регулируется; это является побочным эффектом нагрузки и характеристики управления двух схем. Дифференциальная скорость двух передних колес, которая является важной для эффективности управления, непосредственно не регулируется; это побочный эффект нагрузки и эффективности двух схем регулирования скоростей.
Изобретение может непосредственно решить проблемы, представленные выше, за счет прямого и независимого регулирования средней и дифференциальной характеристик управляемости передних колес. Изобретение также может регулировать характеристики управляемости задних колес для улучшения общей эффективности и опыта эксплуатации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
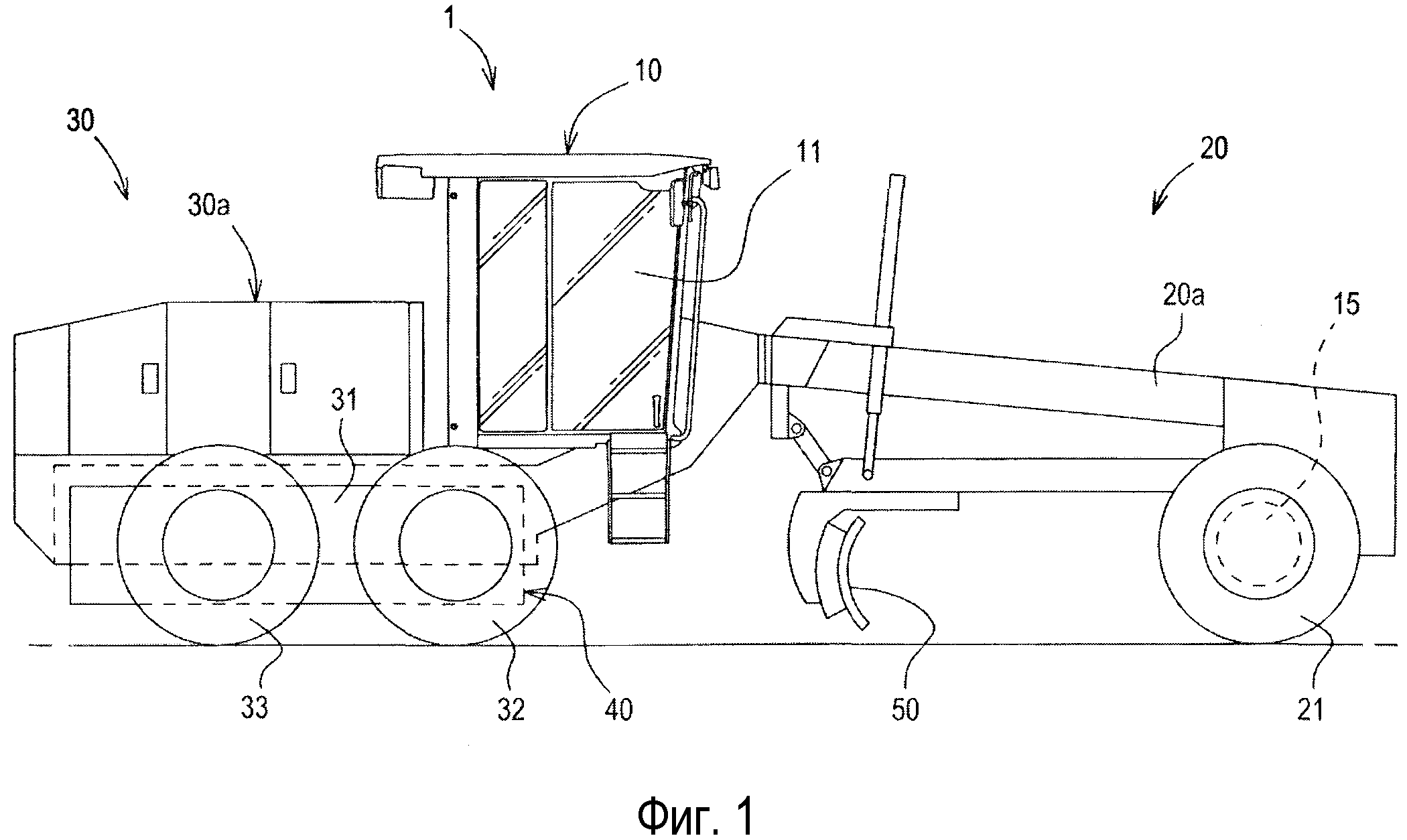
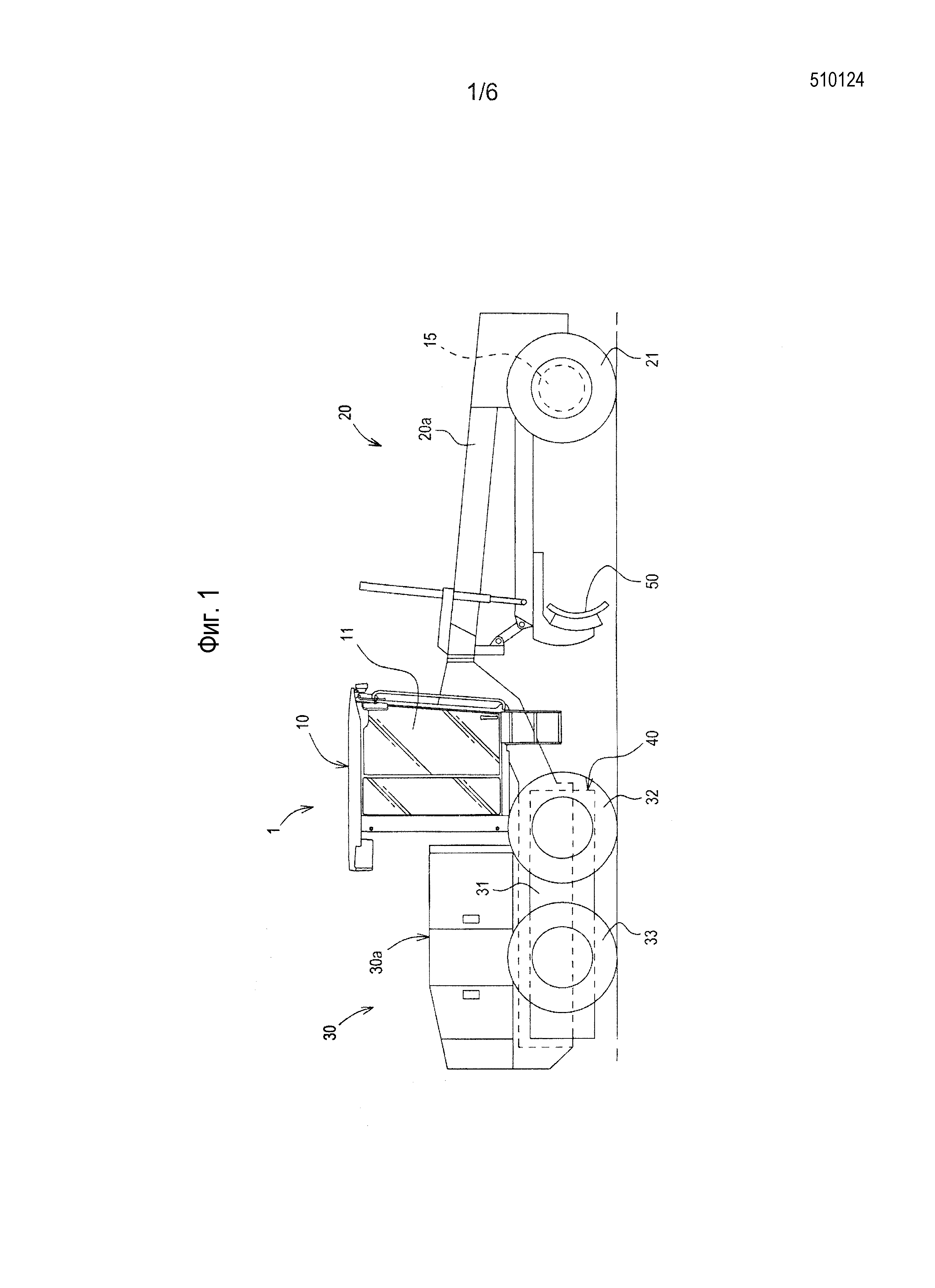
Фиг.1 иллюстрирует приведенное в качестве примера рабочее транспортное средство, использующее изобретение;
Фиг.2 иллюстрирует схему первого иллюстративного варианта осуществления системы управления приводом колес, используемой в иллюстративном рабочем транспортном средстве по Фиг.1;
Фиг.3 иллюстрирует схему второго иллюстративного варианта осуществления системы управления приводом колес;
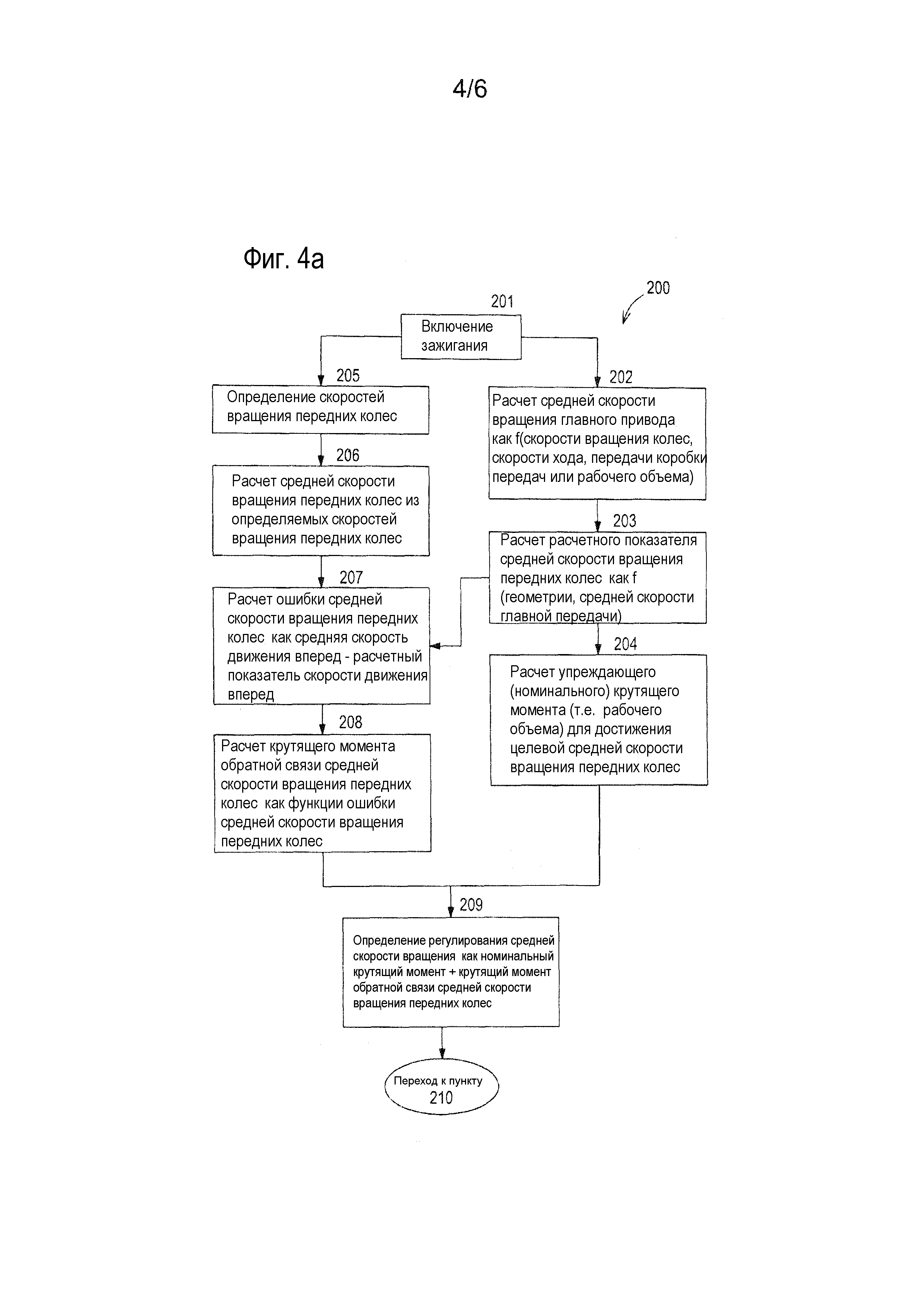
Фиг.4а иллюстрирует приведенную для примера блок-схему для определения средней скорости вращения в иллюстративной системе привода по Фиг.2 и 3;
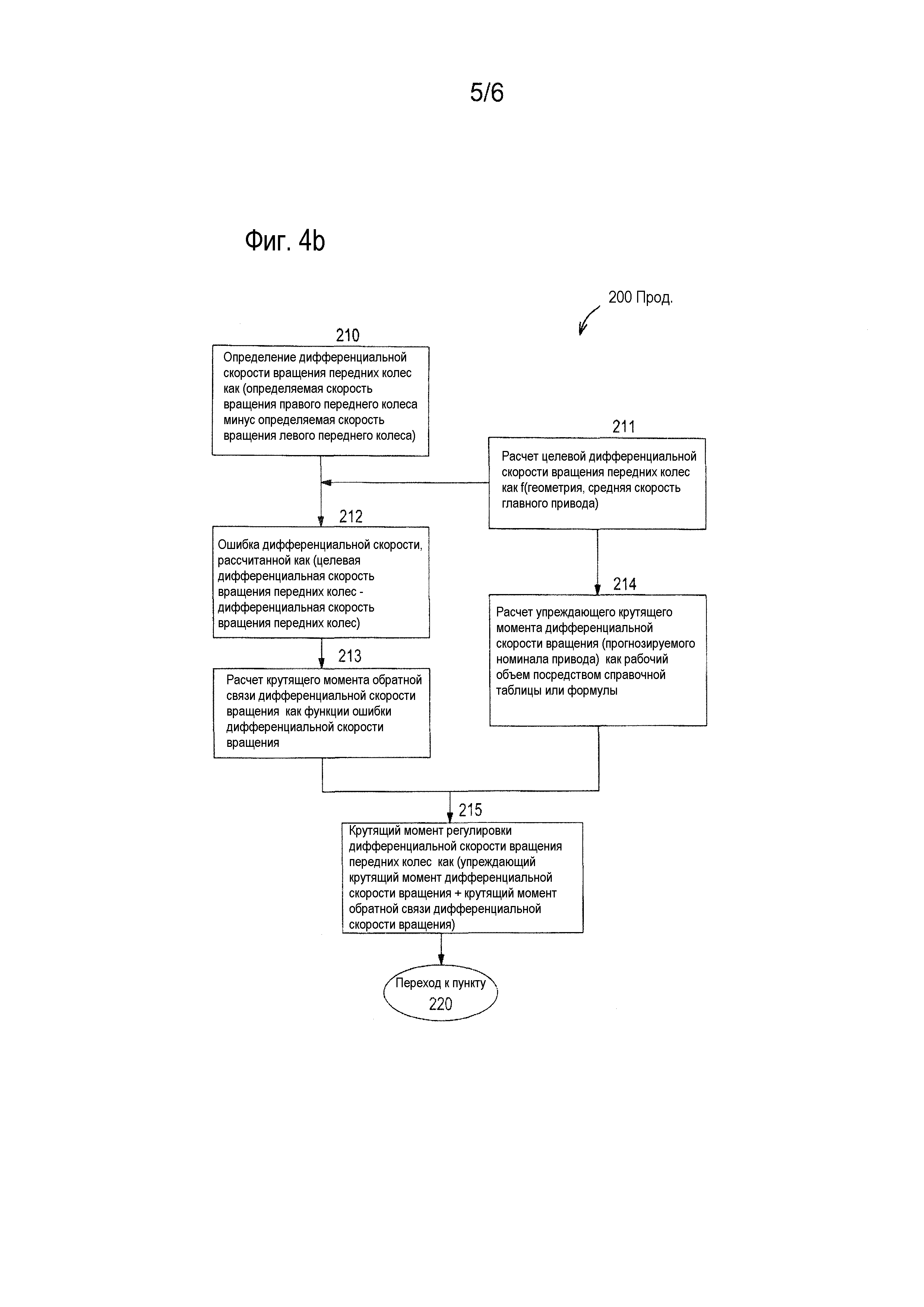
Фиг.4b показывает иллюстративную блок-схему для определения дифференциальной скорости вращения в иллюстративной системе привода по Фиг.2; и
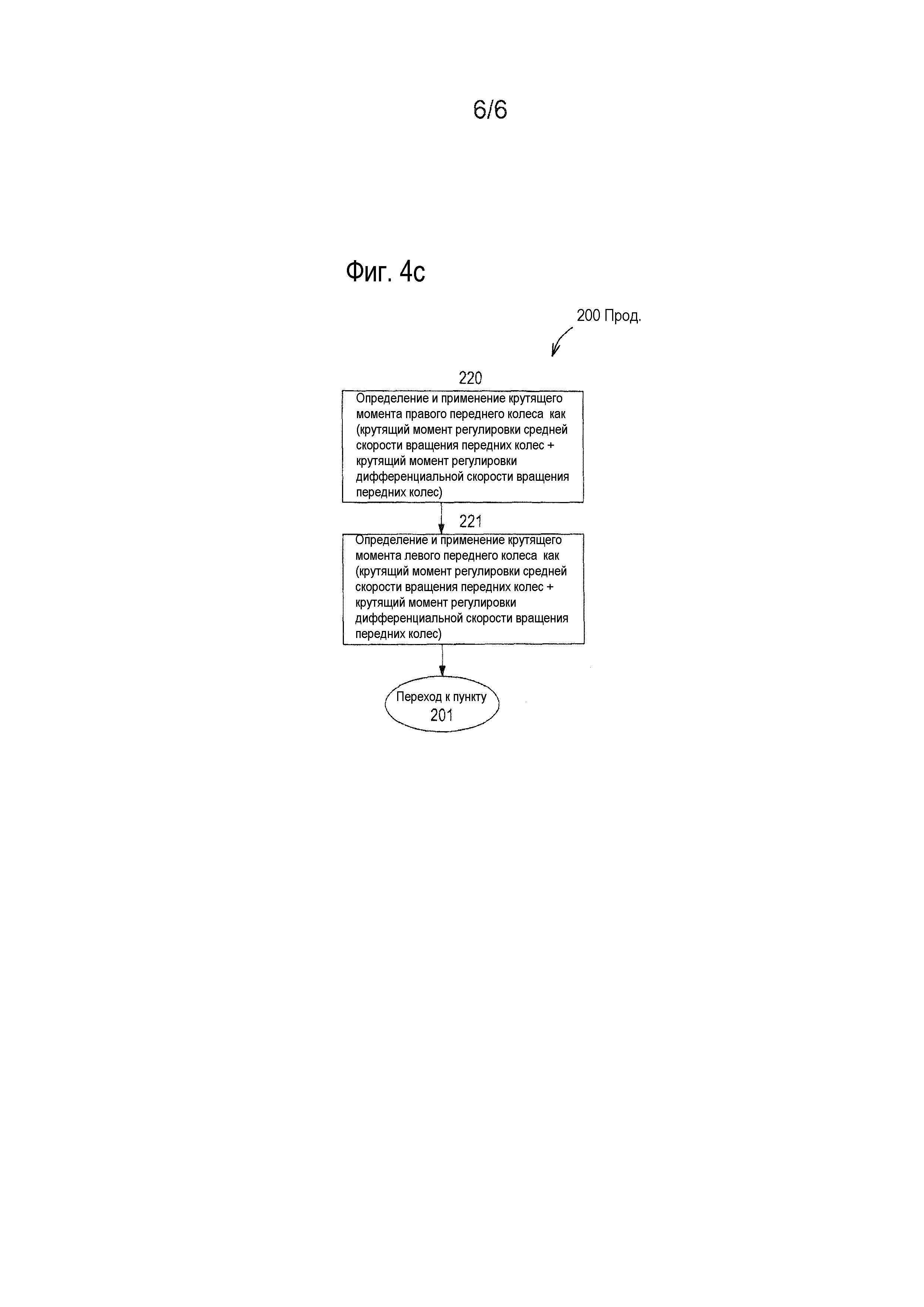
Фиг.4c показывает иллюстративную блок-схему для определения крутящих моментов правого и левого передних колес.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее приведено подробное описание иллюстративных вариантов осуществления изобретения. Аналогичные ссылочные позиции будут при необходимости использоваться по всему описанию.
Фиг.1 иллюстрирует приведенное в качестве примера рабочее транспортное средство - самоходный грейдер 1, который может использовать изобретение. Самоходный грейдер 1 по Фиг.1 может содержать: кабину 10, имеющую рулевое устройство 11 и сиденье 12; переднюю часть 20, имеющую переднюю раму 20a, ведущее левое переднее колесо 21, ведущее правое переднее колесо 22; заднюю часть 30, содержащую заднюю раму 30a, тандемные устройства 31; задние колеса 32, 33; и механизм 40 соединения, содержащий шарнирное соединение 41 и цилиндр 42 соединения для угловых регулировок между передней и задней частями 20, 30. Также может содержаться тандемное устройство 31, от которого задние колеса 32 получают двигательную энергию. Самоходный грейдер 1 также может содержать рабочий инструмент 50 для перемещения земли по мере того, как рабочее транспортное средство 1 движется по земле.
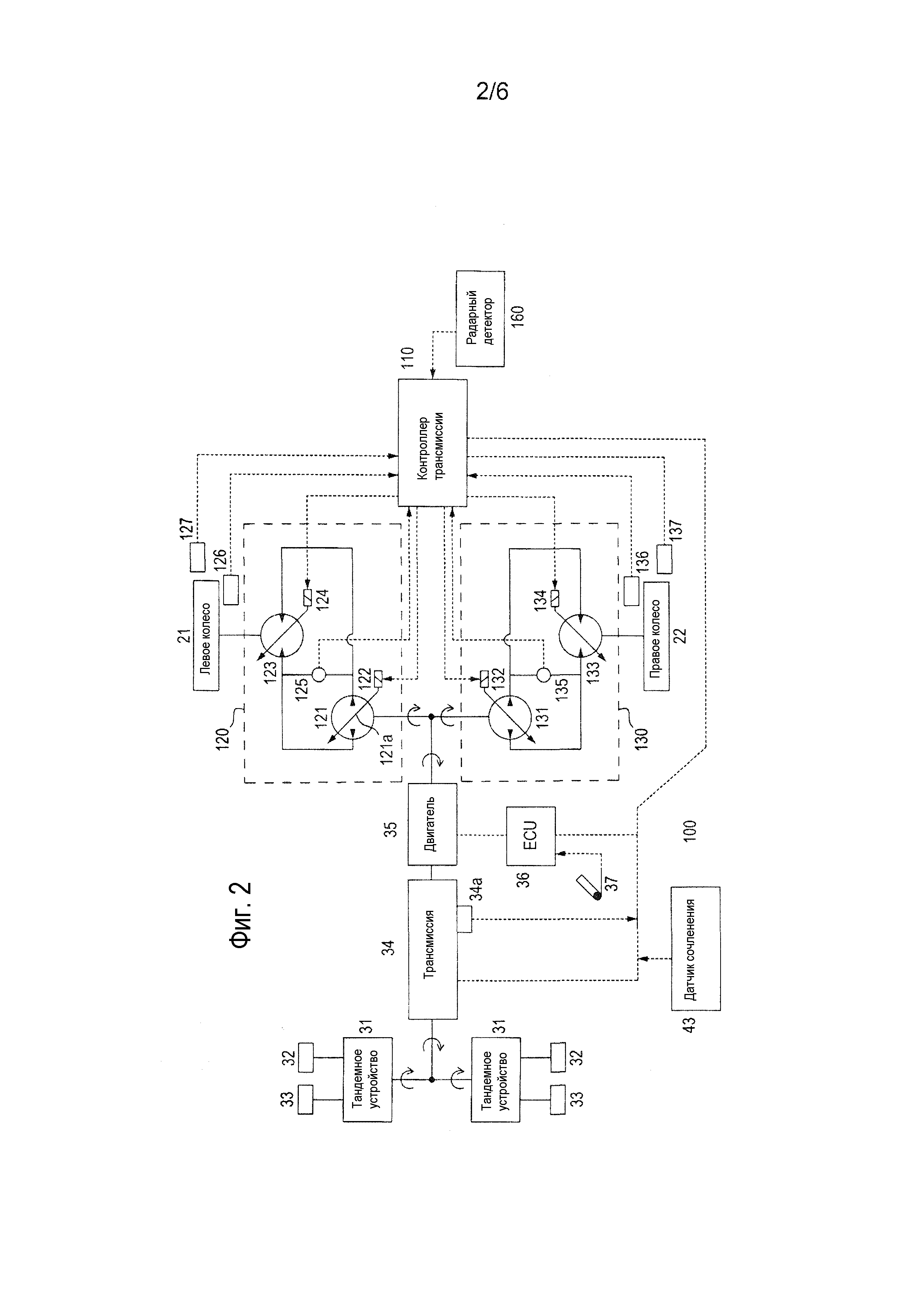
Фиг.2 представляет схему первого иллюстративного варианта осуществления системы 100 управления приводом колес для левого и правого передних колес 21, 22 и задних колес 32, 33 самоходного грейдера Фиг.1. Как проиллюстрировано, система 100 привода может, среди прочего, содержать: тандемные устройства 31, посредством которых задние колеса 32, 33 могут получать двигательную энергию; трансмиссию 34; контроллер 110 трансмиссии, который может быть в сообщении и функционально соединен с: трансмиссией 34; левой гидростатической трансмиссией 120 и правой гидростатической трансмиссией 130. Контроллер 110 трансмиссии также может быть в сообщении с: блоком 36 контроллера двигателя (ECU); датчиком 126 скорости вращения левого переднего колеса; датчиком 127 угла поворота левого переднего колеса; датчиком 136 скорости вращения правого переднего колеса; датчиком 137 угла поворота правого переднего колеса и задним датчиком 34a скорости вращения. Педаль 37 подачи топлива, имеющая особенность выявления и передачи положений педали, может быть в сообщении с ECU 36. Как проиллюстрировано на Фиг.2, также может быть предусмотрен датчик скорости транспортного средства, такой как, например, радарный детектор 160, который находится в сообщении с контроллером 110 трансмиссии.
Как проиллюстрировано, левая гидростатическая трансмиссия 120 может содержать: левый гидравлический насос 121 с изменяющимся рабочим объемом; электромагнит 122 левого насоса для позиционирования качающейся шайбы 121a левого насоса; левый гидравлический двигатель 123; электромагнит 124 левого двигателя для позиционирования качающейся шайбы 123a левого двигателя; и левый датчик 125 давления для определения перепада давлений между левым гидравлическим насосом 121 и левым гидравлическим двигателем 123. Контроллер 110 трансмиссии находится в сообщении с левым датчиком 125 давления и функционально соединен с электромагнитом 122 левого насоса и электромагнитом 124 левого двигателя.
Как и в случае левой гидростатической трансмиссии 120, правая гидростатическая трансмиссия 130 может содержать: правый гидравлический насос 131 с изменяющимся рабочим объемом; электромагнит 132 правого насоса для позиционирования качающейся шайбы 131a правого насоса; правый гидравлический двигатель 133; электромагнит 134 правого двигателя для позиционирования качающейся шайбы 133a правого двигателя; и правый датчик 135 давления для определения перепада давлений между правым гидравлическим насосом 131 и правым гидравлическим двигателем 133. Контроллер 110 трансмиссии находится в сообщении с правым датчиком 135 давления и функционально соединен с электромагнитом 132 правого насоса и электромагнитом 134 правого двигателя.
Как проиллюстрировано, левая и правая гидростатические трансмиссии 120, 130 могут быть механически соединены с двигателем 35. Они также могут быть механически соединены с левым и правым передними колесами 20, 30 соответственно.
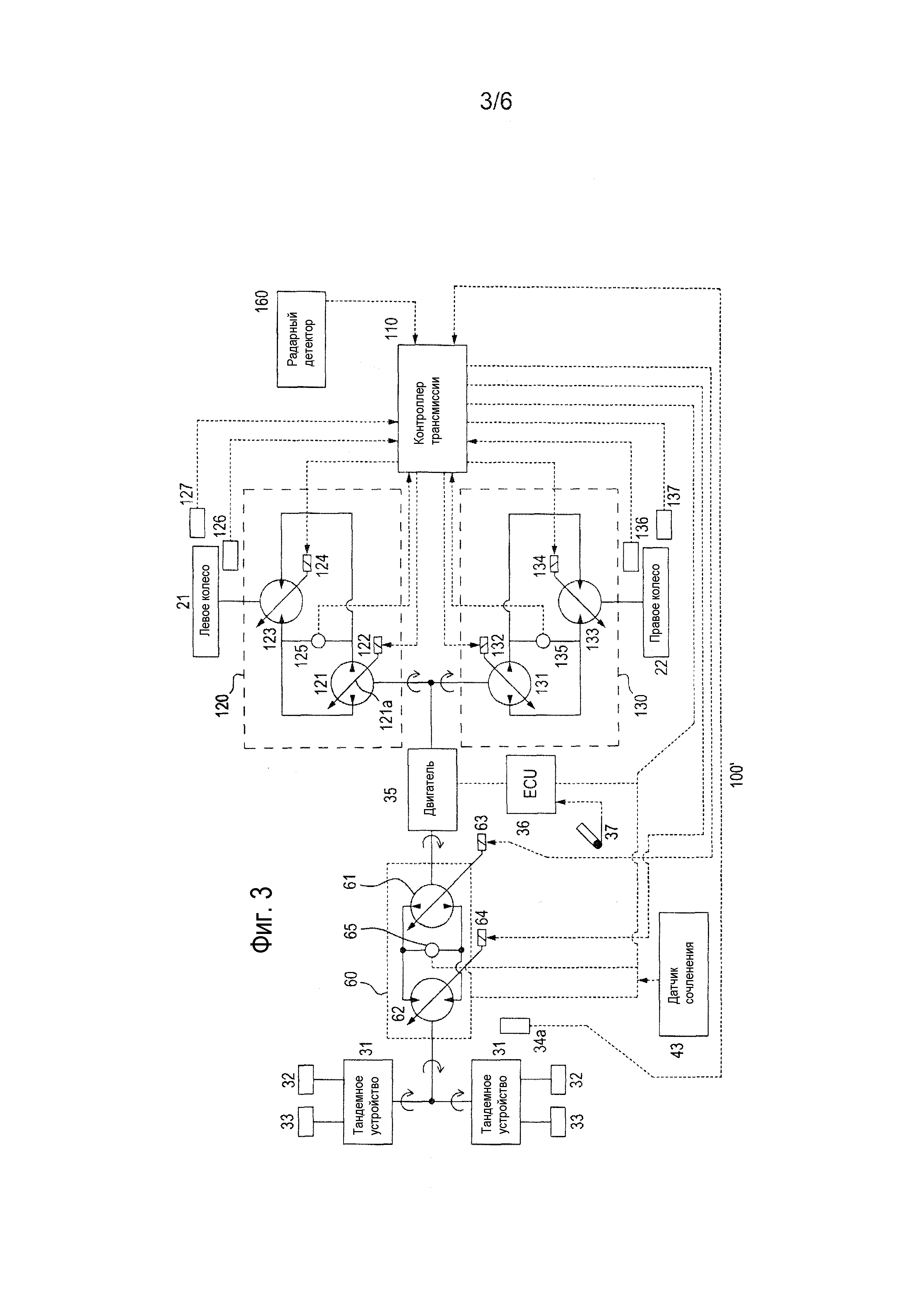
Фиг.3 иллюстрирует схему второго иллюстративного варианта осуществления системы 100’ управления приводом колес. Различия между первым и вторым иллюстративными вариантами осуществления изобретения 100, 100' могут быть приписаны различиям в задней передаче. Второй иллюстративный вариант осуществления системы 100’ управления приводом колес использует заднюю гидростатическую трансмиссию 60 вместо зубчатой трансмиссии 34 первого иллюстративного варианта осуществления системы 100 управления приводом колес. Как и в случае левой и правой гидростатических трансмиссий 120, 130 в передней части рабочего транспортного средства 1, контроллер 110 трансмиссии может управлять качающимися шайбами 61a, 62a соответствующего насоса и двигателя 61, 62 через функциональные соединения с соответствующими электромагнитами 63, 64 насоса и двигателя. Перемещение качающейся шайбы может определять среднюю скорость задних колес 32, 33.
Фиг.4a, 4b и 4c иллюстрируют приведенную в качестве примера блок-схему 200 для определения крутящих моментов регулировки средних и дифференциальных скоростей вращения передних колес для иллюстративных систем 100, 100’ привода по Фиг.2 и 3 и детализации действий контроллера 110 трансмиссии по отношению к трансмиссиям 34, 60, к задним датчикам 34a, 66 скорости вращения, к датчику 126 скорости вращения левого переднего колеса, к датчику 127 угла поворота левого переднего колеса, к датчику 136 скорости вращения правого переднего колеса, к датчику 137 угла поворота правого переднего колеса, к датчику 43 угла сочленения, к устройству 140 ввода данных оператором и, возможно, к детектору скорости транспортного средства, отдельного от силового агрегата самоходного грейдера 1, такого как, например, радарный детектор 160 скорости.
Как проиллюстрировано на Фиг.4a, крутящий момент регулировки средней скорости вращения переднего колеса (ASCE) можно рассматривать как функцию номинального крутящего момента и крутящего момента обратной связи. Как проиллюстрировано, на стадии 201, когда включают зажигание, активируется система 100 привода и включается помощь передним колесам. На стадии 202 контроллер 110 может определить среднюю скорость главного привода как функцию определяемой задней скорости вращения с помощью детектора скорости вращения (такого как, например, задний детектор 34a скорости вращения, задний детектор 66 скорости вращения и тому подобное); определяемой скорости хода транспортного средства с помощью радарного детектора 160; или предполагаемой скорости посредством перекрестной ссылки задних скоростей вращения и рабочих объемов насоса 61 и двигателя 62. Затем на стадии 203 может быть рассчитан расчетный показатель средней скорости вращения передних колес (ATS) на основании средней скорости вращения главного привода и модели транспортного средства (т.е., например, определяемого угла сочленения, определяемого угла поворота, длины между шарнирным соединением 41 и передними колесами 21, 22 и длины между шарнирным соединением 41 и задними колесами 32, 33). Затем на стадии 204 расчетный показатель средней скорости вращения передних колес (ATS) со стадии 203 может использоваться для расчета номинального (или упреждающего) крутящего момента для регулировки средних скоростей вращения передних колес (NAE). В иллюстративных вариантах осуществления передние колеса 21, 22 приводятся в действие гидростатическими трансмиссиями 120, 130 соответственно. В этом случае крутящий момент можно рассматривать как функцию рабочего объема. Соответственно, NAE можно определять посредством использования перекрестных ссылок справочной таблицы скоростей вращения передних колес и смещений качающихся шайб 121a и 131a или посредством эквивалентных формул. Следует отметить, что рабочий объем, особенно изменение рабочего объема, гидростатической трансмиссии 60 может, в некоторых обстоятельствах, рассматриваться как ускорение, так как колеса 32, 33 могут требовать ограниченного времени, чтобы регулирование скорости среагировало на рабочий объем.
Как проиллюстрировано, на стадии 206, средняя скорость вращения передних колес (AMS) может быть определена из скоростей вращения передних колес 21, 22, которые можно определять с помощью левого и правого датчиков 126, 136 скорости вращения. Затем на стадии 207 можно рассчитать ошибку средней скорости вращения передних колес (ASE) как функцию средней скорости вращения передних колес, которая рассчитывается на стадии 206, и расчетного показателя средней скорости вращения передних колес, который рассчитывается на стадии 205 (например, ATS минус AMS). На стадии 208 крутящий момент обратной связи для средней скорости вращения передних колес (AFE) может быть рассчитан как функция ASE. На стадии 209 крутящий момент регулирования средней скорости вращения может быть рассчитан как номинальный упреждающий крутящий момент скорости вращения передних колес плюс крутящий момент обратной связи для средней скорости вращения передних колес (например, NAE плюс AFE).
На Фиг.4b проиллюстрирована аналогичная модель, используемая контроллером 110 для определения соответствующего крутящего момента регулирования дифференциальной скорости вращения передних колес (DSCE). На стадии 210 контроллер 110 может определять дифференциальную скорость вращения передних колес (DFS) как определяемую скорость вращения правого переднего колеса минус определяемая скорость вращения левого переднего колеса. На стадии 211 контроллер 110 может рассчитывать целевую дифференциальную скорость вращения передних колес TDS как функцию средней скорости главного привода и модели транспортного средства, которая может включать: положения задних колес 32, 33 относительно шарнирного соединения 41; положения передних колес 21, 22 относительно шарнирного соединения 41; диаметры передних колес 21, 22; диаметры задних колес 32,33; определяемый угол Aa сочленения; и угол Ta поворота передних колес 21, 22. Средняя скорость главного привода, среди прочего, может быть основана на определяемой скорости вращения с помощью заднего датчика 34a скорости вращения или определяемой скорости хода транспортного средства 1 с помощью детектора скорости, независимого от скоростей вращения, такого как, например, радарный детектор 160 скорости. Если транспортное средство имеет гидростатическую трансмиссию 60, средняя скорость главного привода может быть определена с помощью определяемых рабочих объемов гидростатической трансмиссии 60 посредством эффективной перекрестной ссылки на справочные таблицы или формулы рабочих объемов и средних скоростей главного привода. На стадии 212 контроллер 110 может рассчитывать ошибку дифференциальной скорости вращения передних колес (DSE) как функцию определяемой дифференциальной скорости вращения передних колес (DFS) и целевой дифференциальной скорости вращения передних колес (TDS), т.е. (DSE=TDS-DFS и DFE=f(DSE)). На стадии 213 определяется DFE с помощью перекрестной ссылки значения DSE с рабочими объемами в подходящей справочной таблице или по соответствующей формуле. На стадии 214 может быть определен упреждающий крутящий момент прогнозируемой или номинальной дифференциальной скорости вращения передних колес (NDE) за счет использования TDS для поиска соответствующего рабочего объема посредством перекрестной ссылки по справочной таблице или формуле рабочих объемов и скоростей вращения колес. В заключение, на стадии 215 может быть рассчитан крутящий момент регулирования дифференциальной скорости вращения (DSCE), как сумма упреждающего крутящего момента номинальной дифференциальной скорости и крутящего момента обратной связи дифференциальной скорости, т.е. DSCE=NDE+DFE.
Как проиллюстрировано на Фиг.4c, на стадии 220 контроллер 110 может определять крутящий момент регулирования скорости вращения правого переднего колеса (RSCE) как функцию крутящего момента для регулировки средней скорости вращения переднего колеса (ASCE) и DSCE (напр., RSCE=ASCE+DSCE). На стадии 221 крутящий момент регулирования скорости вращения левого переднего колеса (LSCE) также может быть определен как функция ASCE и DSCE (например, LSCE=ASCE - DSCE). Затем контроллер 110 может послать необходимые команды регулирования скоростей передних колес 21, 22, т.е. сигналы, регулирующие положения качающихся шайб для гидравлических насосов 121, 131 и двигателей 123, 133 передних колес 21, 22, и вернуться на стадию 201.
Устройство 170 ввода оператором может использоваться для передачи установок агрессивности, т.е. установок крутящих моментов передних колес и целевых скоростей передних колес в виде процентного отношения или множества задних скоростей вращения, определяемых с помощью заднего детектора 34a скорости вращения или скорости транспортного средства с помощью, например, радарного детектора 160 скорости и, соответственно, регулирования агрессивности контроллера 110 трансмиссии.
Иллюстративная система 100 привода также может обеспечить возможность регулирования закручивания за счет крутящих усилий посредством мониторинга значений крутящего момента на левом и правом передних колесах 21, 22. В гидростатических приводах гидростатическое или гидравлическое давление может рассматриваться как пропорциональное крутящему моменту. Контроллер 110 трансмиссии может отслеживать значения крутящего момента посредством мониторинга сигналов давления от левого и правого датчиков 125, 135 давления и определения соответствующих крутящих моментов с помощью подходящего уравнения или справочной таблицы. Затем контроллер 110 трансмиссии может регулировать закручивание посредством регулирования левой и правой гидростатических трансмиссий 120, 130 таким образом, чтобы разница между рассчитанными левым и правым крутящими моментами оставалась в пределах предварительно заданного диапазона.
После описания иллюстративных вариантов осуществления выше становится понятно, что могут быть выполнены различные изменения, не выходящие за рамки объема изобретения, который определен в сопровождающей формуле изобретения.
Сельскохозяйственная уборочная машина с выгрузкой ускоренным полотенным транспортером
Охладитель текучей среды, расположенный в воздушном потоке рабочей установки сельскохозяйственного комбайна
Сельскохозяйственная машина (варианты) и способ выполнения уборочных операций
Элеваторная система для чистого зерна комбайна
Соединительное устройство для соединения косилочного ножа с цапфой привода косилочного ножа
Рулонный пресс-подборщик
Способ и система управления подвеской подбарабанья секции обмолота уборочной машины
Подвеска подбарабанья секции обмолота уборочной машины
Устройство в пресс-подборщике для эргономичной загрузки рулонов оберточного материала для тюков
Сельскохозяйственная уборочная машина с вспомогательной силовой установкой и интеллектуальным управлением энергопотреблением
Регулировка крутящего момента для привода на передние колеса

