УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОЙ СРЕДЫ
Вид РИД
Изобретение
Изобретение относится к приборостроению и может быть использовано для прецизионного измерения плотности жидких сред, преимущественно для коммерческого учета нефтепродуктов при работе в составе автоматизированных систем управления технологическими процессами.
Известен магнитно-поплавковый способ измерения плотности жидких сред [1] с различными его модификациями: пружинный, магнитный, флотационный и др. При таком способе измерения плотность является функцией перемещения поплавка под действием пружины, магнитного поля соленоида, скорости перемещения поплавка и т.п.
Существенным недостатком данного способа является временная нестабильность характеристик пружины, влияние вязкости жидкости и налипание примесей на поплавок.
Известны устройства, реализующие способ [1] измерения плотности, конструктивно выполненные в исполнении [2], так, например, электромагнитный плотномер содержит измерительный сосуд с измеряемой жидкой средой и размещенный внутри сосуда поплавок с установленным в нем постоянным магнитом, находящимся в магнитном поле соленоида. Датчик положения поплавка выполнен в виде индукционной катушки. Значение плотности определяется током соленоида в момент равновесия поплавка относительно «нулевой отметки». Недостатком данного способа измерения и устройства для его реализации является нерешенная до конца проблема «нулевой отметки», приводящая к погрешности измерения за счет смещения поплавка относительно нулевой точки отсчета, другим недостатком данного устройства является невозможность его использования в автоматизированных системах управления.
Наиболее близким техническим решением (прототипом) к заявляемому способу и устройству является способ и реализующее его устройство [3]. В данном способе измерения плотности жидкой среды в жидкость погружают поплавок полного погружения со встроенным в него постоянным магнитом. В зоне размещения постоянного магнита создается магнитное поле с вертикальной ориентацией магнитных силовых линий, с помощью которого регулируется взаимодействие с полем постоянного магнита поплавка, то есть регулируется плавучесть последнего в измеряемой жидкой среде и измеряется время t его штатного перемещения Δh, являющееся мерой плотности. Магнитное поле создается электромагнитом со стабилизированным током питания, величину которого принимают заведомо большей, чем величина, необходимая для движения поплавка вверх-вниз в рабочем диапазоне измерения плотностей жидкой среды при смене полярности магнитного поля. Причем со сменой полярности магнитного поля измеряется время каждого из двух временных интервалов, требующихся для полного цикла движения поплавка (вверх t1 и вниз t2 и наоборот) в пределах этого штатного перемещения, а плотность измеряемой жидкой среды определяется суммой (t1+t2) и разностью (t1-t2) времен ходов поплавка. Недостатком прототипа, влияющим на погрешность измерения плотности, является невозможность учета внешних дестабилизирующих факторов, таких как удары, вибрации, особенно в момент отрыва поплавка. Другим дестабилизирующим фактором является случайное отклонение корпуса устройства от вертикали, т.е. обеспечение вертикальности электромагнитной силы. Существенным фактором в процессе измерения может оказаться сила трения в шарнире при перемещении поплавка. Эту силу трения можно уменьшить подбором соответствующих материалов, но она будет присутствовать всегда. Другим важным фактором, влияющим на погрешность измерения плотности, является предположение о равномерности движения поплавка и ламинарном его обтекании потоком жидкости при выводе формулы для вычисления плотности. Движение поплавка будет лавинообразным (с увеличением ускорения во времени), например, при притяжении постоянного магнита уменьшение расстояния вызывает рост электромагнитной силы, а это приведет к росту ускорения и еще большему уменьшению расстояния во времени, что будет способствовать еще большему росту электромагнитной силы и т.д. Погрешность этого фактора будет уменьшаться с уменьшением тока электромагнита и величины перемещения Δh поплавка. Уменьшение тока соленоида и перемещения поплавка приведет к уменьшению диапазона измеряемых плотностей и усложнению конструкции датчиков положения поплавка. В устройстве, реализующем данный способ измерения, используется электромагнит с незамкнутым магнитопроводом. Наличие магнитопровода приводит к дополнительным погрешностям так, как магнитная проницаемость магнитопровода зависит от температуры, существенно увеличивает его индуктивность и накопленную в нем энергию, что затрудняет или делает невозможным использование данного устройства во взрывозащищенном исполнении, например для измерения плотности нефтепродуктов. При изменении полярности питания электромагнита возникают переходные процессы в токе питания электромагнита, которые влияют на время движения поплавка и не учитываются в данном способе измерения. Таким образом, данный способ и устройство для его реализации имеет ряд существенных недостатков, приводящих к увеличению погрешности измерения плотности.
Заявляемый способ измерения плотности и устройство для его реализации обеспечивают повышение точности измерения плотности жидкой среды за счет компенсации внешних воздействий. Внешними воздействиями могут быть удары, вибрации, возмущение жидкой среды, отклонение оси корпуса от вертикали и изменение температуры.
Поставленная задача с достижением технического результата решается за счет того, что в заявляемом способе определения плотности жидкой среды подобно способу-прототипу в жидкой среде также помещается поплавок полного погружения с заранее заданной плотностью со встроенным в него постоянным магнитом. Электромагнитом в зоне размещения постоянного магнита поплавка создается магнитное поле с вертикальной ориентацией магнитных силовых линий с регулированием силового взаимодействия этого поля с полем постоянного магнита поплавка. Так регулируется плавучесть последнего в измеряемой жидкой среде, а положение поплавка изменяется из фиксированного верхнего в фиксированное нижнее положение или наоборот. Технический результат достигается тем, что магнитное поле создается электромагнитом ступенчатым изменением тока питания, который увеличивается до изменения положения поплавка с фиксированием значения тока I1 в момент начала движения поплавка вниз (при положительной плавучести в рабочем диапазоне плотностей жидкой среды) или наоборот, вверх при отрицательной плавучести. Затем значение тока уменьшается до второго изменения положения поплавка и фиксируется значение тока I2 в момент начала движения поплавка вверх (вниз).
Плотность жидкой среды определяют при выполнении условия I1:I2=С по формулам:
где  - значение плотности жидкой среды при первом изменении положения поплавка вниз (вверх);
- значение плотности жидкой среды при первом изменении положения поплавка вниз (вверх);
Р, Vп - вес и объем поплавка;
g - ускорение свободного падения;
K1 и I1=ΔI×N1 - значение коэффициента пропорциональности и тока в момент начала движения поплавка вниз (вверх);
ΔI - шаг изменения тока электромагнита;
 - значение плотности жидкой среды при втором изменении положения поплавка вверх (вниз);
- значение плотности жидкой среды при втором изменении положения поплавка вверх (вниз);
K2 и I2=ΔI×N2 - значение коэффициента пропорциональности и тока в момент начала движения поплавка вверх (вниз);
N1 и N2 - количество импульсов тока в момент начала движения поплавка вниз (вверх) и вверх (вниз);
Технический результат достигается также тем, что устройство, содержащее корпус с измерительной полостью, поплавок со встроенным постоянным магнитом в данной полости, электрический датчик положения поплавка, соединенный с блоком вычисления плотности, электромагнит, соединенный с источником питания электромагнита, отличается тем, что магнитное поле создается электромагнитом без магнитопровода. Кроме того, дополнительно в корпусе устройства установлены датчики температуры и вертикальности, соединенные с вычислителем плотности. Постоянный магнит расположен в нижней части поплавка, корпус устройства перфорирован и подвешен вертикально на гибкой связи, проходящей через ось симметрии корпуса и поплавка.
В предлагаемом способе определения плотности жидкой среды в отличие от прототипа измеряется значение токов в момент изменения положения поплавка и вычисляется блоком вычислителя плотности отношение этих токов I1:I2=C. Эта константа С зависит от конструкции плотномера и является постоянной в рабочем диапазоне плотностей жидкости. Таким образом, вычисляя С, мы компенсируем влияние ударов, вибраций и возмущений жидкости в каждом цикле измерения, исключая результаты, для которых не выполняется равенство I1:I2=С. Другим словами, не учитываются неверные результаты, что повышает точность определения плотности.
Использование ступенчатого тока питания электромагнита позволяет поплавку постепенно занять строго определенное место в пространстве (вдоль магнитных силовых линий), что обеспечивает стабильность электромагнитной силы, так как ее величина зависит от взаимного расположения поплавка относительно электромагнита. Ступенчатый ток питания электромагнита центрирует поплавок вдоль вертикальной симметрии корпуса, исключая влияние силы трения и переходных процессов на результаты измерений. Отсутствие магнитопровода позволяет не учитывать изменение магнитной проницаемости магнитопровода от температуры, использовать устройство во взрывоопасных зонах и упростить конструкцию. Все эти факторы повышают точность определения плотности.
Отклонение корпуса устройства от вертикали и температуры компенсируется функциями влияния, которые записываются в память вычислителя плотности. Функции влияния определяются при калибровке плотномера. Подвеска корпуса устройства на гибкой связи позволяет уменьшить телесный угол отклонения и аппроксимировать функцию влияния отклонения от вертикали корпуса устройства линейной зависимостью. Компенсация отклонения корпуса устройства от вертикали и температуры также повышает точность измерения плотности.
Перфорированный корпус способствует обмену жидкой среды между измерительной полостью и областью, в которой нужно измерить плотность, что влияет на достоверность результатов и погрешность измерения плотности. Например, измерение плотности по высоте резервуара.
Расположение постоянного магнита в нижней части поплавка повышает его устойчивость и исключает трение о стенки корпуса.
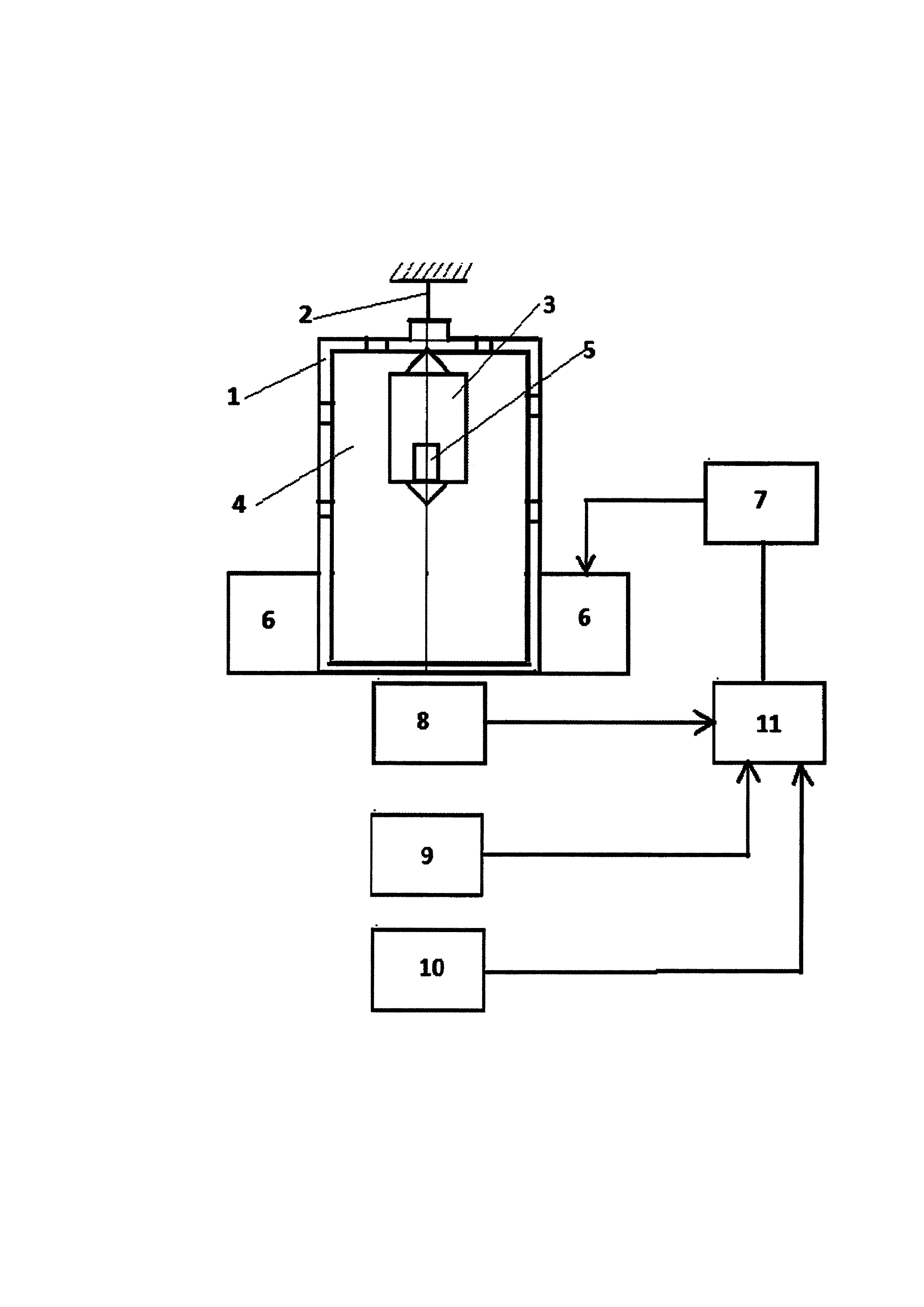
На чертеже приведена функциональная схема устройства, реализующего способ определения плотности жидкой среды.
Устройство состоит из перфорированного корпуса 1, подвешенного на гибкой связи 2, поплавка 3 со встроенным постоянным магнитом 5, который расположен в нижней части поплавка 3. Поплавок 3 помещен в измерительную полость 4 между стенками корпуса 1 и имеет возможность вертикального перемещения. Электромагнит 6 без магнитопровода расположен на корпусе устройства 1 и соединен с источником питания электромагнита 7, который управляется блоком вычисления плотности 11. На корпусе устройства 1 размещены датчики положения поплавка 8, вертикальности 9 и температуры 10. Выходы датчиков 8, 9 и 10 соединены с блоком вычисления плотности 11. Источник питания электромагнита 7 содержит ЦАП и усилитель мощности. Блок вычисления плотности 11 управляет и измеряет значение тока электромагнита 7. Блок вычисления плотности 11 выполнен на микропроцессоре с энергонезависимой памятью, в которую записаны функции влияния отклонения от вертикали, температуры и константы, необходимые для вычисления плотности. Датчик положения поплавка 8 может быть выполнен с использованием дискретного датчика Холла (SS441 А) или дифференциального трансформатора. В качестве датчика вертикальности 9 можно использовать двухкоординатный акселерометр ADIS 16003, а в качестве датчика температуры 10 - микросхему DS1820.
Обязательным условием правильного функционирования устройства является выполнение равенства I1:I2=C в каждом цикле измерения. Под циклом измерения поплавка подразумевают изменение состояния поплавка и возврат его в исходное положение. Данное равенство показывает, что в момент измерения не было неучтенных внешних механических воздействий на поплавок.
Устройство реализует заявляемый способ следующим образом. Для определенности рассмотрим вариант с положительной плавучестью поплавка, когда выталкивающая сила больше веса поплавка. Вариант с отрицательной плавучестью отличается только направлением движения поплавка. В исходном состоянии корпус 1 погружается в жидкость и она поступает в измерительную полость 4 через перфорированные отверстия. Поплавок 3 всплывает и находится в крайнем верхнем фиксированным положении. С блока вычисления плотности 11 поступает команда на пуск счетчика и он начинает счет импульсов. С выхода счетчика блока вычисления плотности 11 двоичный код, пропорциональный количеству импульсов, поступает на вход ЦАП источника питания электромагнита 7. С выхода ЦАП источника питания электромагнита 7 ток поступает на вход усилителя мощности и затем в цепь питания электромагнита. При ступенчатом увеличении тока до значения I1 поплавок 3 под действием электромагнитной силы FЭ начнет быстрое движение вниз и займет крайнее нижнее положение. Сработает датчик положения 8 и счетчик блока вычисления плотности 11 остановится. Значение тока I1 заносится в память микропроцессора. Затем поступает команда микропроцессора и счетчик блока вычисления плотности 11 переключается в реверсивный режим. Ток источника питания электромагнита начинает уменьшаться. При ступенчатом уменьшении тока до значения I2 поплавок 3 под действием выталкивающей силы FA начнет быстрое движение вверх и займет крайнее верхнее фиксированное положение. Значение тока I2 заносится в память микропроцессора и вычисляется отношение I1:I2=С. Если отношение токов равно С, то цикл измерений завершается и вычисляется плотность жидкой среды. Если нет, то цикл измерений начинается сначала.
Выведем формулы для вычисления плотности и условие, при котором в момент измерения на поплавок не действуют внешние возмущения. Для этого рассмотрим действующие силы на поплавок в момент изменения его состояния (отрыва) в крайнем верхнем и нижнем положениях:


где  - тяговое усилие электромагнита в крайнем верхнем положении;
- тяговое усилие электромагнита в крайнем верхнем положении;
 - значение тока электромагнита, при котором поплавок начинает движение вниз;
- значение тока электромагнита, при котором поплавок начинает движение вниз;
ΔI - шаг изменения тока электромагнита;
N1 - количество импульсов (шагов), при которых поплавок начинает движение вниз;
Р, Vп - вес и объем поплавка;
 - тяговое усилие электромагнита в крайнем нижнем положении;
- тяговое усилие электромагнита в крайнем нижнем положении;
I2=ΔI×N2 - значение тока электромагнита, при котором поплавок начинает движение вверх;
N2 - количество импульсов (шагов), при которых поплавок начинает движение вверх;
 - коэффициенты пропорциональности;
- коэффициенты пропорциональности;
FA=ρЖ×Vп×g - сила Архимеда;
ρж - плотность измеряемой жидкости.
В формулах (1) и (2) тяговые усилия электромагнита переносятся в правые части и, разделив (1) на (2), получим:
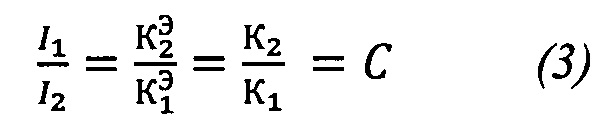
где  ;
; 
Полученное равенство (3) не зависит от плотности измеряемой жидкости и может служить критерием воздействия внешних сил, неучтенных в равенствах (1) и (2). Другими словами, если в уравнениях (1) и (2) появятся силы, отличные от FА, Р, FЭВ, FЭН, то уравнение (3) не будет выполняться. Из уравнений (1) и (2) получим формулу для вычисления плотности:



где  - измеренное значение плотности жидкой среды в момент начала движения поплавка вниз (положительная плавучесть);
- измеренное значение плотности жидкой среды в момент начала движения поплавка вниз (положительная плавучесть);
Р и Vп - вес и объем поплавка;
g - ускорение свободного падения;
К1 и I1=ΔI×N1 - значение коэффициента пропорциональности и тока в момент движения поплавка вниз (положительная плавучесть);
 - измеренное значение плотности жидкой среды в момент начала движения поплавка вверх;
- измеренное значение плотности жидкой среды в момент начала движения поплавка вверх;
K2 и I2 - значение коэффициента пропорциональности и тока в момент начала движения поплавка вверх.
Совокупность существенных признаков заявляемого способа измерения плотности жидкой среды и устройства для его осуществления обеспечивает достижение требуемого технического результата, соответствует критериям изобретения и подлежит защите охранным документом РФ.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Кивилис С.С. Плотномеры. М.: Энергия, 1980, с. 97-101.
2. Авторское свидетельство СССР №1642319, М. кл. G01N 9/12, 9/22, 1991.
3. Патент РФ 2277705, М. кл. G01N 9/12, 2004.
Плотномер для измерения плотности жидкой среды, содержащий корпус с измерительной полостью, поплавок со встроенным постоянным магнитом в данной полости, электрический датчик положения поплавка, соединенный с блоком вычисления плотности, электромагнит, соединенный с источником питания электромагнита, отличающийся тем, что магнитное поле создают электромагнитом без магнитопровода и ступенчатым источником тока питания электромагнита, имеющим электрическую связь с блоком вычисления плотности, в корпусе плотномера установлены датчики температуры и вертикальности, соединенные с вычислителем плотности, постоянный магнит расположен в нижней части поплавка, корпус устройства перфорирован и подвешен вертикально на гибкой связи, проходящей через ось симметрии корпуса и поплавка.