Результат интеллектуальной деятельности: УСТРОЙСТВО АМОРТИЗАЦИИ УДАРОВ ДЛЯ РОБОТА-ГУМАНОИДА
Вид РИД
Изобретение
Настоящее изобретение относится к устройству амортизации ударов, в частности, для обеспечения сохранности и защиты электроники от ударов, например, связанных с падением прибора, содержащего эту электронику (платы, компоненты…). Изобретение находит свое применение для защиты электроники, установленной в роботах-гуманоидах, от ударов при падениях упомянутого робота, которые представляют собой события, имеющие крайне отрицательные последствия для использования этих роботов.
Робот может считаться гуманоидом, если он обладает определенными признаками внешнего вида и функциональными возможностями человека: голова, тело, две руки, две кисти, две ноги и две ступни. Роботы-гуманоиды могут ходить, делать жесты своими конечностями или головой. Сложность жестов, которые они могут производить, постоянно повышается. Несмотря на эти достижения, роботы-гуманоиды могут совершать падения. Эти падения могут происходить во время доводочных испытаний робота, а также в последующей фазе использования робота по причине неизбежно встречающихся препятствий и внешних воздействий. Для обеспечения применения в широком масштабе роботы-гуманоиды должны выдерживать такие падения, причем многократно.
Основная трудность связана с относительно высоко расположенным центром тяжести робота-гуманоида. Например, если робот высотой 70 см падает, ускорение, действующее на компоненты головы при ударе об землю, могут достигать значений порядка 70G. Эти нежелательные, но неизбежные падения могут привести в современных роботах к повреждению хрупких компонентов, таких как электроника или датчики и приводы.
В известном решении была сделана попытка преодолеть эту трудность за счет опускания центра тяжести. Например, известен робот, нижняя часть которого в виде юбки содержит наиболее тяжелые устройства. Однако недостатком этого подхода является ограничение движений и функциональных возможностей верхней части робота, в частности рук и головы. Для повышения стойкости робота по отношению к падениям были также предусмотрены защитные механизмы, выполненные с возможностью срабатывания при обнаружении падения робота. Однако этот подход тоже имеет свои ограничения, в частности, возможность несвоевременного срабатывания защитного механизма во время движений робота.
Поэтому существует потребность в решениях, позволяющих улучшить прочность роботов-гуманоидов, чтобы они могли выдерживать многократные удары. Разумеется, такое решение должно вписываться в функциональную и конструктивную среду робота.
В связи с этим объектом изобретения является устройство амортизации ударов для подвижного робота, при этом устройство содержит:
- жесткую конструкцию, предназначенную для соединения с роботом-гуманоидом,
- наружный деформирующийся кожух и
- амортизатор;
при этом амортизатор представляет собой мягкую ячеистую структуру, содержащую совокупность ячеек, открытых в главном направлении, и неподвижно соединенную с жесткой конструкцией на первом конце в главном направлении и соединенную с наружным деформирующимся кожухом на втором конце, противоположном первому концу, в главном направлении.
Предпочтительно наружный кожух соединен также непосредственно с жесткой конструкцией при помощи по меньшей мере одного поглощающего крепления типа сайлентблока.
Предпочтительно амортизатор содержит плоскость соединения, по существу перпендикулярную к главному направлению; при этом ячеистая структура амортизатора выполнена таким образом, чтобы ячейки закрывались по мере удаления от плоскости соединения в главном направлении.
Предпочтительно амортизатор выполнен из материала, выбранного из группы, в которую входят натуральный каучук, 4-полиизопрен, синтетический полиизопрен, полибутадиен, сополимер стирола и бутадиена, полиизобутилен, изобутилен-изопрен, хлоропрен, неопрен, сополимер бутадиена и акрилонитрила, сополимер этилена и пропилена, тройной сополимер, полиэфир-блок-амид, эластомерные термопластики, термопластические полиуретаны, термопластические олефины, полисульфиды, протеин эластин, силиконовые эластомеры, фторэластомеры, перфторэластомеры, сополимер этилена и винилацетата, полиакриловые эластомеры, сополимер этилена и акриловой кислоты, хлорсульфоновый полиэтилен, эпихлоргидриновые эластомеры.
Предпочтительно устройство содержит электронный модуль, закрепленный на жесткой конструкции, при этом амортизатор содержит вентиляционный канал, открытый с двух концов в главном направлении, позволяющий удалять тепло, выделяемое электронным модулем, наружу робота.
Предпочтительно устройство содержит вентилятор, закрепленный на амортизаторе и выполненный с возможностью создания воздушного потока вблизи электронного модуля и в вентиляционном канале.
Предпочтительно устройство содержит по меньшей мере один световой источник, соединенный с жесткой конструкцией; при этом амортизатор содержит сквозной канал, выполненный с возможностью направления света, излучаемого световым источником, наружу робота.
Предпочтительно устройство содержит по меньшей мере один звуковой источник, соединенный с жесткой конструкцией; при этом амортизатор содержит сквозной канал, выполненный с возможностью направления звуковой волны, излучаемой звуковым источником, наружу робота.
Предпочтительно устройство содержит по меньшей мере один микрофон, закрепленный на внутренней стенке наружного кожуха; при этом амортизатор обеспечивает звукоизоляцию.
Объектом изобретения является также робот-гуманоид, содержащий устройство амортизации ударов, имеющее вышеупомянутые признаки.
Объектом изобретения является также голова робота-гуманоида, содержащая устройство амортизации ударов, при этом жесткая конструкция соединена с туловищем робота. Предпочтительно голова содержит первое устройство амортизации, расположенное в передней части головы, и второе устройство амортизации, расположенное в задней части головы; при этом оба устройства амортизации расположены друг против друга в главном направлении и с двух сторон от жесткой конструкции, общей для двух устройств амортизации.
Наконец, объектом изобретения является туловище робота-гуманоида, содержащее первое устройство амортизации, расположенное в передней части робота-гуманоида, и второе устройство амортизации, расположенное в задней части робота; при этом оба устройства амортизации расположены друг против друга в главном направлении и с двух сторон от жесткой конструкции, общей для двух устройств амортизации.
Изобретение и его другие преимущества будут более очевидны из нижеследующего подробного описания варианта выполнения, представленного в качестве примера со ссылками на следующие фигуры:
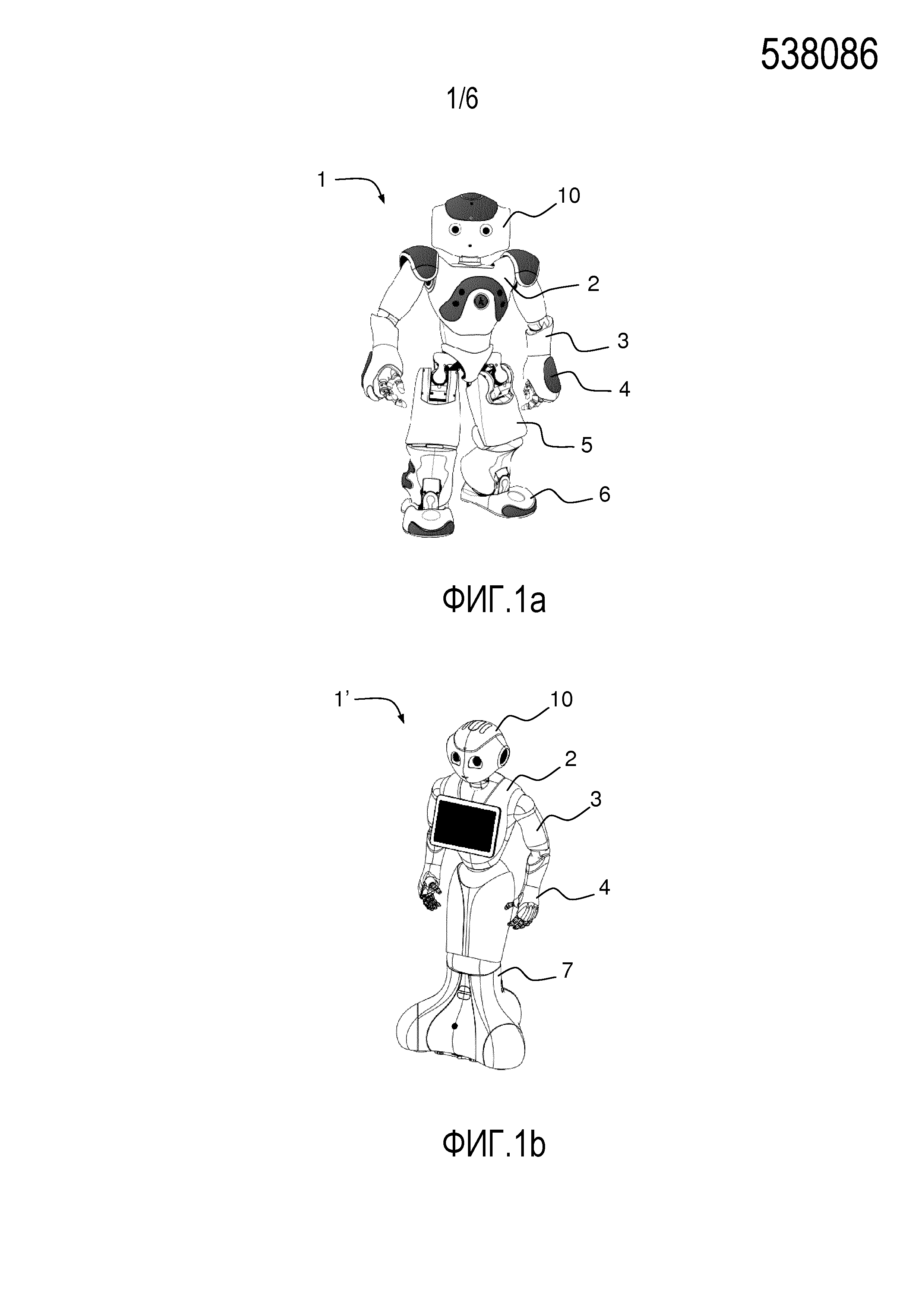
Фиг. 1а и 1b - два примера роботов-гуманоидов, разработанных заявителем.
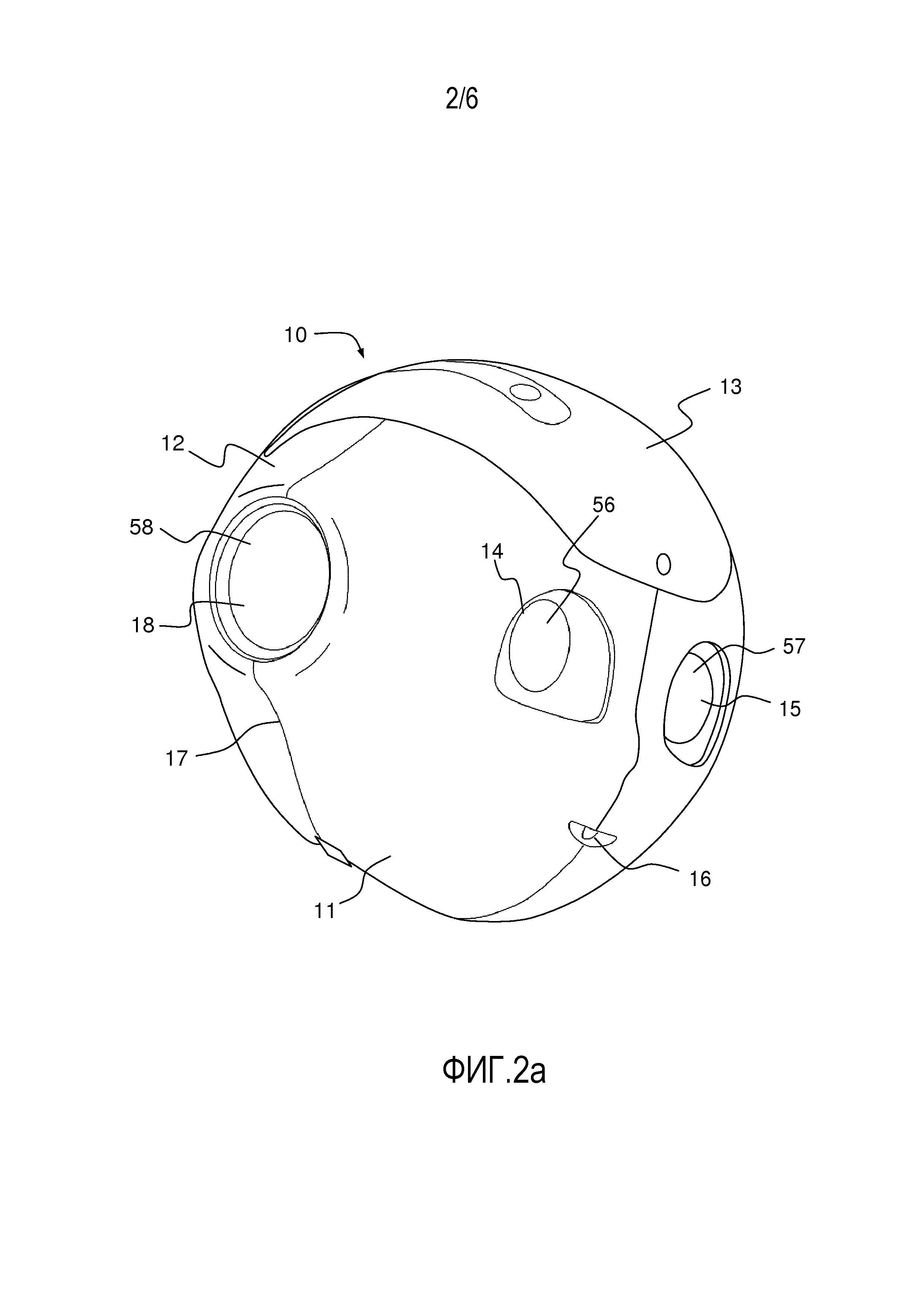
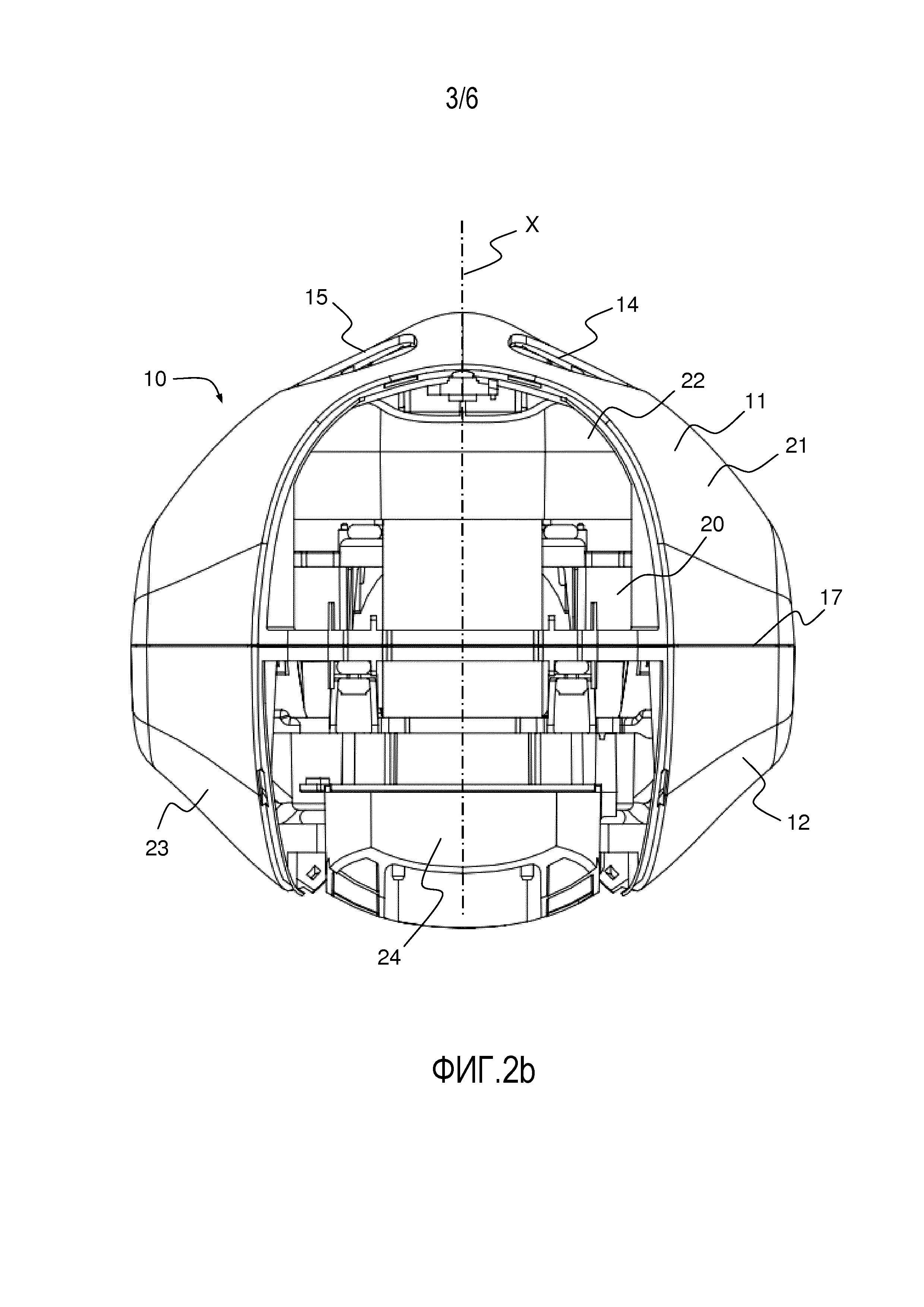
Фиг. 2а и 2b - голова робота-гуманоида, содержащая заявленное устройство амортизации, соответственно вид в перспективе и вид сверху.
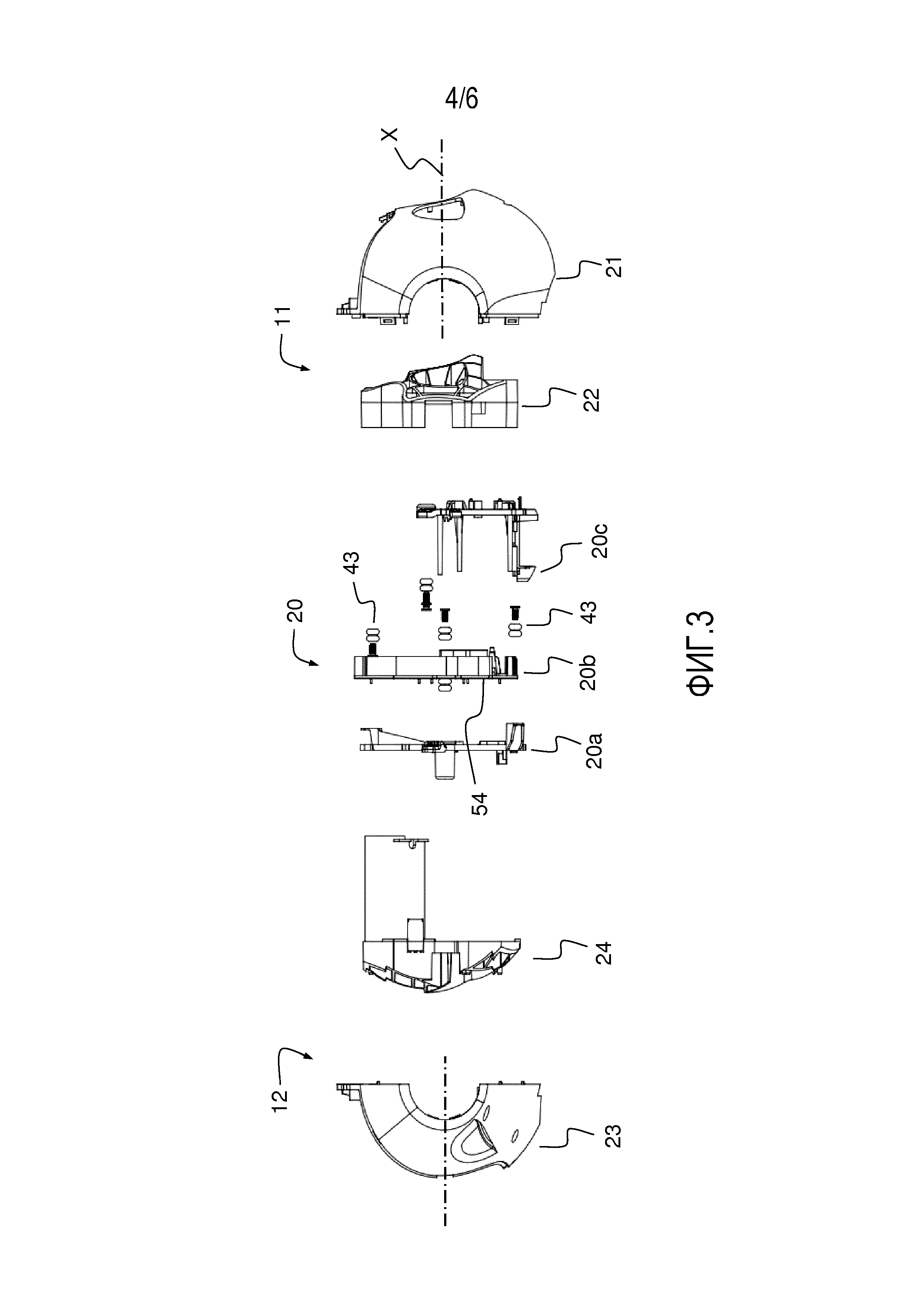
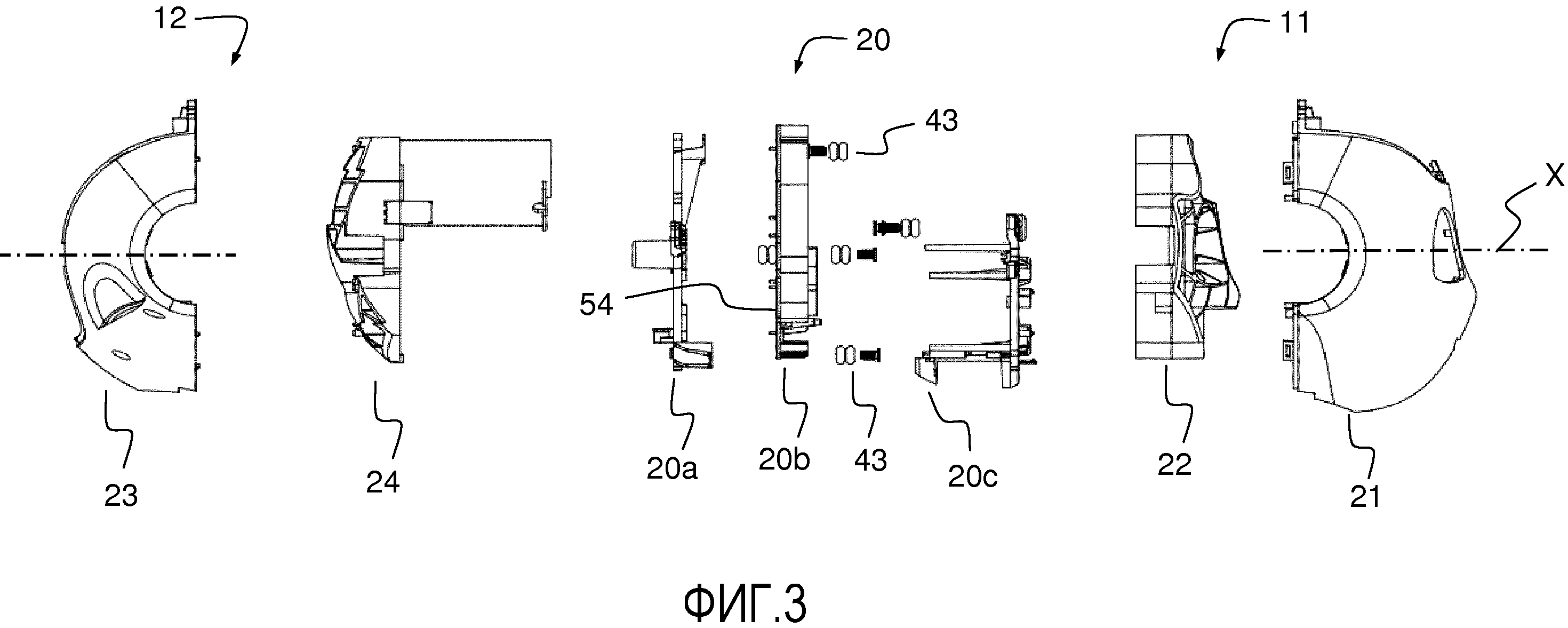
Фиг. 3 - вид в разборе переднего устройства амортизации и заднего устройства амортизации, соединенных с несущей стойкой головы робота-гуманоида.
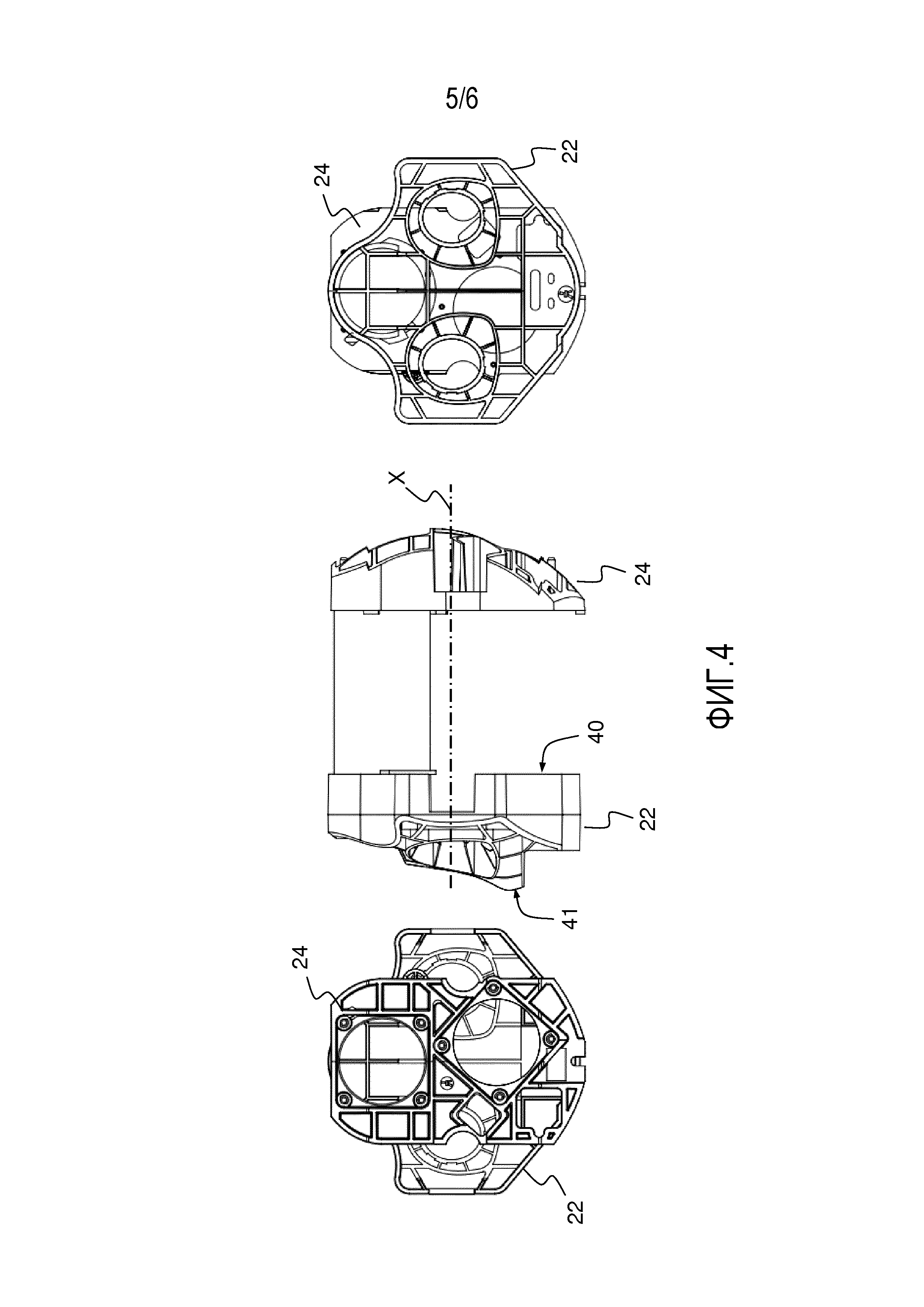
Фиг. 4 - три вида амортизатора переднего устройства и амортизатора заднего устройства.
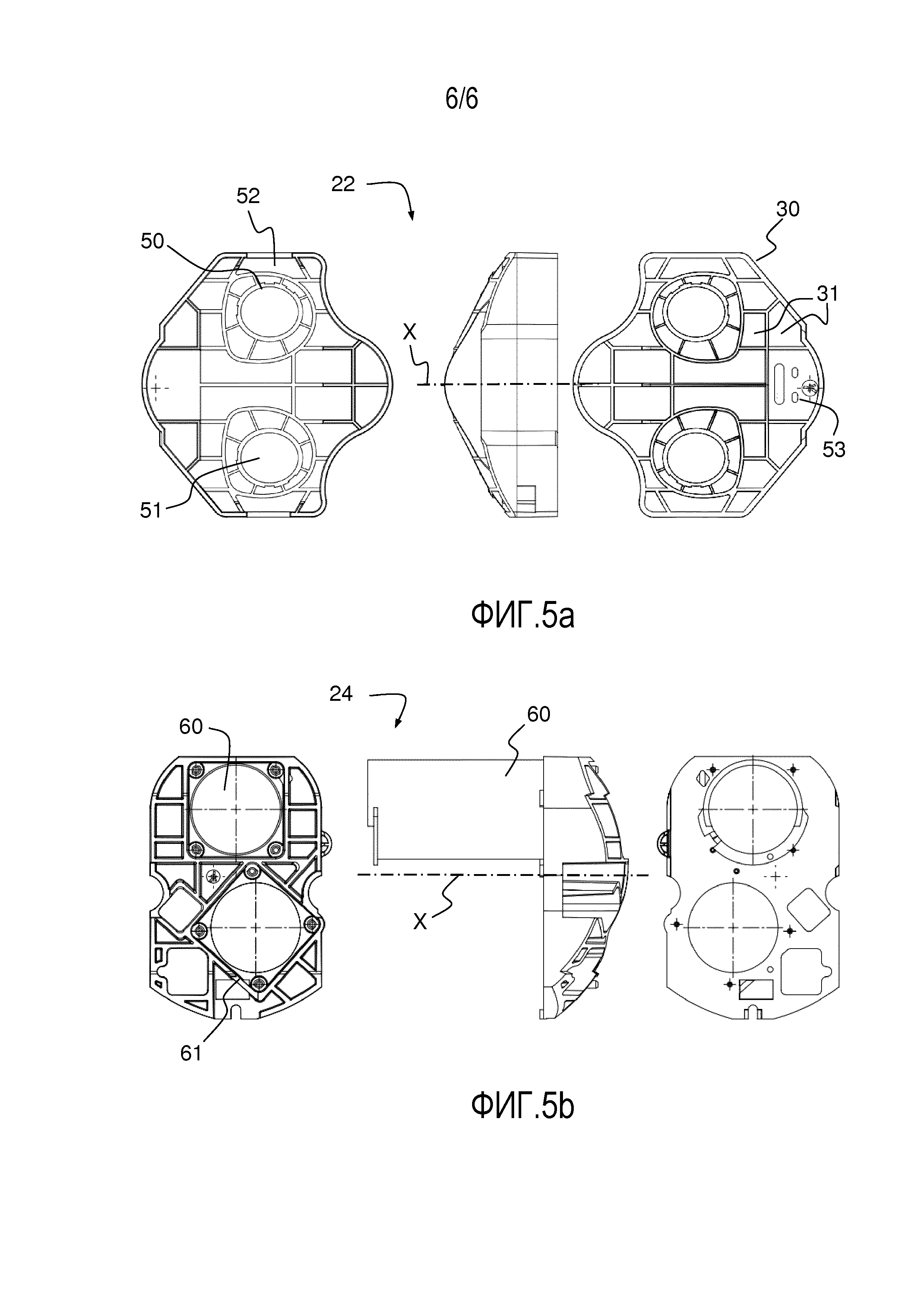
Фиг. 5а и 5b - три вида амортизатора, соответственно переднего устройства и заднего устройства.
Для большей ясности на разных фигурах одни и те же элементы имеют одинаковые обозначения.
На фиг. 1а и 1b представлены два примера роботов-гуманоидов, разработанных компанией ALDEBARAN ROBOTICTM. Робот-гуманоид 1, показанный на фиг. 1а, содержит голову 10, туловище 2, две руки 3, две кисти 4, две ноги 5 и две ступни 6. Робот-гуманоид 1ʹ, показанный на фиг. 1b, содержит голову 10, туловище 2, две руки 3, две кисти 4 и юбку 7. Заявленное устройство амортизации предназначено для предохранения таких примеров роботов-гуманоидов от ударов, в частности, в случае падения робота.
Заявленное устройство амортизации выполнено, в частности, с возможностью защиты хрупких компонентов, которые могут находиться в голове робота-гуманоида. Описанный ниже вариант выполнения относится к голове робота-гуманоида, оснащенной двумя устройствами амортизации ударов. Этот вариант выполнения позволяет эффективно предохранять при падениях голову робота большого размера, например, порядка 70 см или более. Однако, разумеется, изобретение не ограничивается этим частным вариантом головы робота-гуманоида, оснащенной двумя устройствами амортизации. Изобретение в целом относится к устройству амортизации ударов, которое можно применять отдельно или в комбинации для обеспечения защиты головы робота-гуманоида или любого другого компонента робота-гуманоида. В целом устройство можно применять для подвижного робота, содержащего по меньшей мере одну нижнюю шарнирную конечность, входящую в контакт с землей, что может привести к риску падения робота. В настоящем документе название «подвижный робот» обозначает робот, содержащий по меньшей мере одну нижнюю конечность, шарнирно соединенную с туловищем робота вокруг по меньшей мере одной степени свободы во вращении.
На фиг. 2а и 2b представлен, соответственно в перспективе и сверху, пример головы робота-гуманоида, содержащей заявленное устройство амортизации. В данном примере голова 10 робота-гуманоида содержит переднее устройство 11 амортизации, заднее устройство 12 амортизации и верхнюю крышку 13. В переднем устройстве 11 амортизации выполнены два боковых отверстия 14 и 15, представляющих собой глаза робота, и центральное отверстие 16, представляющее собой рот робота. Переднее 11 и заднее 12 устройства амортизации содержат две общие боковые кромки, разделяющие переднюю часть и заднюю часть робота. Правая общая кромка, обозначенная позицией 17, показана на фиг. 2а и 2b. В каждом переднем 11 и заднем 12 устройстве амортизации вдоль каждой из двух боковых кромок выполнено отверстие в виде полукруга. Полукруглое отверстие переднего устройства амортизации расположено напротив полукруглого отверстия заднего устройства амортизации, и, таким образом, они образуют вдоль двух общих боковых кромок отверстие 18 по существу в виде круга, представляющее собой ухо робота.
На фиг. 2b верхняя крышка 13 не показана, чтобы можно было видеть компоненты внутри головы 10 робота. Голова 10 робота соединена с туловищем 2 робота при помощи жесткой несущей стойки 20. Несущая стойка может представлять собой соединение нескольких конструктивных компонентов, неподвижно соединенных между собой и показанных на фиг. 3. Эти компоненты могут быть выполнены из жесткого пластического материала. На несущей стойке можно закрепить различные устройства, такие как электронный модуль, датчики или приводы.
Каждое устройство амортизации содержит наружный деформирующийся кожух и амортизатор. Переднее устройство 11 амортизации содержит наружный кожух 21 и амортизатор 22. Заднее устройство 12 амортизации содержит наружный кожух 23 и амортизатор 24. Эти элементы будут подробно описаны ниже.
На фиг. 3 представлен вид в разборе переднего устройства амортизации, заднего устройства амортизации и несущей стойки. Несущая стойка 20 представляет собой показанное в разборе соединение конструктивных компонентов 20а, 20b и 20с. После соединения эти компоненты образуют несущую стойку 20, соединенную с туловищем робота. В представленном примере голова робота оснащена двумя устройствами амортизации, расположенным друг против друга с двух сторон от несущей стойки. Как правило, заявленное устройство амортизации содержит наружный деформирующийся кожух, амортизатор и жесткую конструкцию. Устройство амортизации предназначено для поглощения и рассеяния энергии удара, чтобы предохранять хрупкие компоненты, которые могут быть закреплены на жесткой конструкции. В представленном примере несущая стойка 20 представляет собой жесткую конструкцию, общую для двух устройств 11 и 12 амортизации. Иначе говоря, жесткая конструкция каждого из устройств амортизации выполнена заодно с несущей стойкой, обеспечивающей удержание головы робота относительно его туловища.
На фиг. 4 представлены в трех видах амортизаторы 22 и 24 переднего 11 и заднего 12 устройств амортизации. Эта два амортизатора, соответственно передний амортизатор 22 и задний амортизатор 24, тоже показаны в трех видах, соответственно на фиг. 5а и на фиг. 5b.
В представленном примере голова робота-гуманоида содержит два устройства амортизации. Заявленное устройство амортизации отличается тем, что содержит жесткую конструкцию 20, соединенную с роботом-гуманоидом, наружный деформирующийся кожух и амортизатор, представляющий собой мягкую ячеистую структуру, содержащую совокупность ячеек, открытых в главном направлении Х. Кроме того, амортизатор неподвижно закреплен на жесткой конструкции на первом конце в главном направлении Х и соединен с наружным деформирующимся кожухом на втором конце, противоположном первому концу, в главном направлении Х.
Для выполнения наружного деформирующегося кожуха можно предусмотреть различные материалы. Например, можно применять полистирол. Можно также нанести покрытие или произвести поверхностную обработку на наружной стенке наружного деформирующегося кожуха для улучшения его внешнего вида и его восприятия наощупь.
Амортизатор представляет собой мягкую ячеистую структуру, содержащую совокупность открытых ячеек в главном направлении Х. В частности, на фиг. 5а показана ячеистая структура переднего амортизатора 22. Ячеистая структура содержит множество стенок 30, по существу параллельных главному направлению. Стенки образуют совокупность ячеек 31, открытых в главном направлении. Для выполнения амортизатора можно предусмотреть различные материалы, способные к упругой деформации. В частности, можно предусмотреть силикон, полиуретан или материалы растительного происхождения, типа губки. Предпочтительно амортизатор выполнен из материала, выбранного из группы, в которую входят натуральный каучук, 4-полиизопрен, синтетический полиизопрен, полибутадиен, сополимер стирола и бутадиена, полиизобутилен, изобутилен-изопрен, хлоропрен, неопрен, сополимер бутадиена и акрилонитрила, сополимер этилена и пропилена, тройной сополимер, полиэфир-блок-амид, эластомерные термопластики, термопластические полиуретаны, термопластические олефины, полисульфиды, протеин эластин, силиконовые эластомеры, фторэластомеры, перфторэластомеры, сополимер этилена и винилацетата, полиакриловые эластомеры, сополимер этилена и акриловой кислоты, хлорсульфоновый полиэтилен, эпихлоргидриновые эластомеры.
Амортизатор неподвижно соединен с несущей стойкой 20 на первом конце в главном направлении и соединен с наружным деформирующимся кожухом на втором конце, противоположном первому концу в главном направлении. На фиг. 4 показаны для переднего устройства 11 амортизации первый конец 40, неподвижно соединенный с несущей конструкцией, и второй конец 41, соединенный с наружным деформирующимся кожухом 21. Первый конец можно соединить с несущей конструкцией при помощи различных средств крепления, в частности при помощи клея. Точно так же, второй конец можно соединить с наружным деформирующимся кожухом при помощи различных средств соединения. В частности, его можно закрепить на наружном кожухе при помощи клея.
В частном варианте выполнения амортизатор удерживается также на несущей стойке за счет простого соединения в паз. В этом варианте наружные кожухи переднего и заднего устройств амортизации могут быть соединены между собой на уровне их общих боковых кромок 17. Поскольку наружные кожухи просто соединены в паз с амортизаторами, которые соединены в паз с несущей стойкой, то кожухи могут смещаться относительно несущей стойки.
Эта конфигурация устройства амортизации, состоящего из деформирующегося кожуха и амортизатора, представляет особый интерес для защиты чувствительных компонентов, закрепленных на жесткой конструкции. Например, во время падения робота вперед или назад голова сталкивается с землей в направлении, близком к главному направлению. Наружный кожух частично поглощает удар за счет своей деформации и частично передает его на амортизатор. Затем происходит поглощение удара амортизатором в два этапа. На первом этапе происходит деформация прогиба стенок ячеистой структуры. Во время этой деформации стенок перпендикулярно к главному направлению ей противодействует относительно слабое напряжение. Затем на втором этапе, если прогиба стенок оказывается недостаточно для полного поглощения удара, он поглощается за счет упругой деформации эластичного материала амортизатора. В частности, после прогиба различные стенки опять оказываются в положении опоры друг на друга, и амортизатор действует по существу равномерно в условиях упругой деформации.
Таким образом, чувствительные компоненты, находящиеся в голове робота и закрепленные на несущей стойке, подвергаются более плавному торможению. Ударная волна, передаваемая от наружного кожуха на несущую стойку, по существу ослабляется последовательными деформациями кожуха и амортизатора.
В предпочтительном варианте выполнения настоящего изобретения наружный кожух устройства амортизации может быть также напрямую соединен с несущей стойкой при помощи по меньшей мере одного поглощающего крепления типа сайлентблока. Как показано на фиг. 3, предусмотрено крепление наружного кожуха 21 переднего устройства 11 амортизации при помощи множества поглощающих креплений 43 типа сайлентблока. Поглощающие крепления 43 соединяют несущую стойку с наружным кожухом при помощи нескольких блоков эластичного материала, который может поглощать удары и вибрации между этими двумя элементами. В случае удара эти поглощающие крепления деформируются одновременно с амортизатором и способствуют также поглощению удара по наружному кожуху. Таким образом, эта конфигурация позволяет элементам, выступающим из наружной поверхности робота, например, таким как черты лица робота, деформироваться при деформации наружного кожуха и при прогибе стенок амортизатора, не передавая ударной волны на несущую стойку. Удар поглощается и рассеивается после этой первой деформации поглощающими креплениями и за счет упругой деформации амортизатора.
Ячеистая структура амортизатора обеспечивает большую гибкость в проектировании и предпочтительно позволяет вписать устройство амортизации в конструктивную и функциональную среду робота. Например, голова робота может содержать один или несколько световых источников, соединенных с несущей стойкой и представляющих собой глаза робота. При этом амортизатор переднего устройства амортизации содержит один или несколько сквозных каналов, обозначенных на фиг. 5а позициями 50 и 51, позволяющих направлять свет, излучаемый световым источником или световыми источниками, наружу головы робота, например, через отверстия 14 и 15, показанные на фиг. 2а и 2b. Сквозные каналы 50 и 51 неподвижно соединены одним концом с несущей стойкой и вторым концом с внутренней стенкой наружного кожуха. Они обеспечивают функцию световода. Предпочтительно они позволяют одновременно концентрировать свет, излучаемый световым источником, и защищать этот источник в случае удара.
Голова робота может также содержать один или несколько звуковых источников 58, соединенных с несущей стойкой. Согласно такому же принципу, амортизатор устройства амортизации содержит в этом случае один или несколько сквозных каналов 52, позволяющих направлять звуковую волну, излучаемую звуковым источником или звуковыми источниками, наружу головы робота. Как и в предыдущем случае, эти сквозные каналы 52 могут быть неподвижно соединены одним концом с несущей стойкой и вторым концом с внутренней стенкой наружного кожуха, позволяя одновременно направлять звуковую волну наружу головы и предохранять звуковой источник в случае удара.
Настоящим изобретением предусмотрен также микрофон 53, закрепленный на внутренней стенке наружного кожуха устройства амортизации. Кожух соединен с несущей стойкой через амортизатор и, возможно, через поглощающие крепления, которые могут поглощать удары и вибрации. Предпочтительно крепление микрофона на наружном деформирующемся кожухе позволяет ограничивать шум от вибраций, например, возникающих при движениях робота.
Как показано на фигурах, ячеистая структура может быть также выполнена с возможностью охлаждения головы робота. Для удаления тепла, выделяемого электронными компонентами головы робота, или, в целом, тепла, выделяемого электронным модулем 54, закрепленным на жесткой конструкции устройства амортизации, ячеистая структура амортизатора выполнена таким образом, что образует вентиляционный канал 60, открытый на двух концах в главном направлении, позволяющий удалять тепло, выделяемое электронным модулем, наружу робота. Иначе говоря, одна из ячеек ячеистой структуры образует вентиляционный канала 60. При нормальной работе ячеистая структура обеспечивает удаление тепла. В случае удара при прогибе ячеистой структуры передача тепла может прекратиться. Это прекращение теплопередачи является моментальным. Действительно, ячеистая структура, работающая в эластичной области во время ударов, восстанавливает свою первоначальную форму, как только удар прекращается, и восстанавливает также свою функцию передачи тепла через вентиляционный канал 60.
На фиг. 5b показан вентиляционный канал 60, выполненный в амортизаторе 24 заднего устройства 12 амортизации. Устройство амортизации может содержать вентилятор, закрепленный на амортизаторе и позволяющий создавать воздушный поток вблизи электронного модуля и в вентиляционном канале 60. Для этого амортизатор 24 содержит полость 61, выполненную с возможностью размещения в ней вентилятора, и средства крепления в четырех углах основания вентилятора. Преимуществом крепления вентилятора на амортизаторе является возможность устранения шумов и вибраций, которые возникают при вращении лопастей вентилятора и могут передаваться на компоненты, закрепленные на несущей стойке.
В примере, представленном на фигурах, вентиляционный канал и вентилятор расположены на одном и том же устройстве амортизации, то есть на заднем устройстве амортизации. Можно также предусмотреть выполнение вентиляционного канала и установку вентилятора на двух отдельных устройствах амортизации.
Вентиляционный канала 60 представляет собой одну ячейку из совокупности открытых ячеек амортизатора. Вентиляционный канал имеет длину в главном направлении, намного превышающую длину других ячеек. Вентиляционный канал по существу цилиндрической формы проходит через круглое сечение несущей стойки. Он входит в контакт одним из своих концов в главном направлении с амортизатором переднего устройства амортизации, как показано на фиг. 4. Вентиляционный канал, установленный проходящим насквозь через несущую стойку, позволяет поддерживать за счет силы тяжести амортизатор на несущей стойке. Эта опора за счет силы тяжести дополняет клеевое крепление амортизатора на несущей стойке.
Предпочтительно амортизатор устройства амортизации является моноблочным. Амортизатор может быть выполнен при помощи способа формования без боковой колодки. Для этого амортизатор предпочтительно содержит плоскость соединения, по существу перпендикулярную к главному направлению; ячеистая структура выполнена таким образом, чтобы ячейки закрывались по мере удаления от плоскости соединения в главном направлении. Можно также отметить, что, поскольку амортизатор выполнен из мягкого и сильно деформирующегося материала, то его можно деформировать во время извлечения из пресс-формы. Следовательно, можно допустить присутствие стенок небольшого размера, которые сопротивляются извлечению из пресс-формы в главном направлении.
В примере, представленном на фигурах, голова содержит два устройства амортизации. В предпочтительном варианте выполнения изобретения предусмотреть робот-гуманоид, содержащий голову и корпус, при этом голова содержит:
- несущую стойку 20, соединенную с корпусом робота,
- переднее устройство 11 амортизации и заднее устройство 12 амортизации; при этом каждое устройство амортизации содержит наружный деформирующийся кожух, соответственно 21 и 23, амортизатор, соответственно 22 и 24, и жесткую конструкцию, выполненную заодно с несущей стойкой 20.
Оба устройства амортизации расположены друг против друга в главном направлении с двух сторон от несущей стойки 20. Амортизаторы двух устройств 11 и 12 амортизации представляют собой мягкую ячеистую структуру, содержащую совокупность ячеек, открытых в главном направлении, и неподвижно соединены с несущей стойкой 20 первым концом в главном направлении и соединены с наружным деформирующимся кожухом, соответственно 21 и 23, вторым концом, противоположным первому концу в главном направлении. Наружный кожух 21 переднего устройства 11 амортизации соединен также напрямую с несущей стойкой 20 при помощи по меньшей мере одного поглощающего крепления типа сайлентблока.
Амортизатор 24 заднего устройства 12 амортизации содержит вентиляционный канал 60, открытый с двух концов в главном направлении, позволяющий удалять тепло, выделяемое электронным модулем, закрепленным на несущей стойке 20, наружу головы. Заднее устройство 12 амортизации содержит также вентилятор, закрепленный на амортизаторе 24 и выполненный с возможностью создания воздушного потока вблизи электронного модуля и в вентиляционном канале 60 заднего устройства 12 амортизации.
Амортизатор 22 переднего устройства 11 амортизации содержит два сквозных канала 50 и 51, позволяющих направлять наружу головы свет, излучаемый соответственно двумя источниками 56 и 57 света, закрепленными на несущей стойке 20. Амортизатор 22 содержит также по меньшей мере один сквозной канал, позволяющий направлять звуковую волну, излучаемую звуковым источником 58, закрепленным на несущей стойке 20. Наконец, переднее устройство 11 амортизации содержит также по меньшей мере один микрофон, закрепленный на внутренней стенке наружного кожуха 21.
Изобретение относится в целом к устройству амортизации ударов. В частности, устройство амортизации ударов предназначено для подвижного робота, например, для робота-гуманоида. Изобретение относится также к роботу-гуманоиду, оборудованному устройством амортизации ударов, имеющим описанные выше отличительные признаки. Предусмотрен робот, голова которого содержит первое устройство амортизации, расположенное в передней части головы, и второе устройство амортизации, расположенное в задней части головы; при этом оба устройства амортизации расположены друг против друга в главном направлении и с двух сторон от жесткой конструкции, общей для обоих устройств амортизации.
Предусмотрен также робот-гуманоид, туловище которого содержит первое устройство амортизации, расположенное в передней части робота-гуманоида, и второе устройство амортизации, расположенное в задней части робота, при этом оба устройства амортизации расположены друг против друга в главном направлении и с двух сторон от жесткой конструкции, общей для обоих устройств амортизации.
База для зарядки батареи и способ зарядки с применением такой базы
Инструмент, предназначенный для подъема транспортного средства
Устройство обнаружения препятствий на горизонтальной плоскости и способ обнаружения с применением такого устройства
Приведение в действие руки, предназначенной для оснащения робота-гуманоида
Способ локализации робота в плоскости локализации
Режим ожидания человекоподобного робота
Система, способ и компьютерный программный продукт для обработки взаимодействия человекоподобного робота с человеком
Способы и системы для обработки диалога с роботом
Безопасный моторизованный шарнир, предназначенный для оснащения человекоподобного робота
Устройство предварительного позиционирования и разъемного крепления шарнирных элементов робота-гуманоида
База для зарядки батареи и способ зарядки с применением такой базы
Инструмент, предназначенный для подъема транспортного средства
Устройство обнаружения препятствий на горизонтальной плоскости и способ обнаружения с применением такого устройства
Сферическое колесо для обеспечения движения транспортного средства и транспортное средство, содержащее колесо
Устройство обнаружения препятствий при помощи пересекающихся плоскостей и способ обнаружения с применением такого устройства
Устройство для зарядки батареи и способ зарядки, реализующий работу такого устройства

